CN112769480A - 一种超大视场角的空间激光至光纤耦合装置及应用方法 - Google Patents
一种超大视场角的空间激光至光纤耦合装置及应用方法 Download PDFInfo
- Publication number
- CN112769480A CN112769480A CN202110078595.2A CN202110078595A CN112769480A CN 112769480 A CN112769480 A CN 112769480A CN 202110078595 A CN202110078595 A CN 202110078595A CN 112769480 A CN112769480 A CN 112769480A
- Authority
- CN
- China
- Prior art keywords
- dimensional adjustable
- adjustable reflector
- optical fiber
- photoelectric detection
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/11—Arrangements specific to free-space transmission, i.e. transmission through air or vacuum
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/40—Transceivers
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Optical Couplings Of Light Guides (AREA)
Abstract
本发明公开一种超大视场角的空间激光至光纤耦合装置及应用方法。装置包括一个旋转平台,两个二维调节反射镜,两个光电探测模块,两个分束器,一个控制器和若干个透镜;在旋转平台侧边通过一个二维可调反射镜将特定角度的空间激光转换成射向旋转平台中心,并且平行于旋转平台的激光;通过旋转平台中心的二维可调反射镜,将入射激光转换到平行于旋转轴的激光,耦合进光纤收发模块或探测器)。本发明依据光电探测模块中光斑的实时位置,反馈调节两个二维可调反射镜,实现空间激光与旋转平面的夹角在正负90度范围变化时,实时保持空间激光和光纤收发模块或探测器的耦合。
Description
技术领域
本发明涉及一种超大视场角的空间激光至光纤耦合装置及应用方法。
背景技术
随着无线通信的蓬勃发展,空间光通信由于频带高、保密性强、速度高等优势,已经逐渐在水下光通信,室内可见光通信中得到应用。但是空间光通信由于载波的波长短,方向性强,发散角小,对接收装置的视场角提出了很高的要求。尤其对于室内可见光通信,接收和发射方的相对位置会发生实时变化,因此需要接收装置拥有较大的视场角,能够在不同位置时依旧持续接收到光信号。而高速光探测器往往采用光纤接口,耦合精度需求苛刻,对入射光斑的尺寸和位置有很高的要求。
目前常见的接收装置为会聚透镜或者凹面镜,但是其接收视场角小,只能配合不同类型光探测器应用于特定场合。在接收端位置变化的情景,只能配合低速的面阵光探测器。在接收端位置不变的情景,能够适配高速的光纤接口的光探测器。因此,在采用光纤接口的高速光探测器并且接收端位置变化情景下,传统的会聚透镜或者凹面镜难以满足实际应用需求。
发明内容
为了克服现有技术的不足,本发明的目的在于提供一种超大视场角的空间激光至光纤耦合装置及应用方法。依据光斑在两个光电探测模块中的实时位置,反馈调整两个反射镜的两个旋转轴和旋转平台的旋转角,从而使空间光保持耦合到光纤接口中,实现大视场角的光接收装置。
本发明采用的技术方案是:
一种超大视场角的空间激光至光纤耦合装置,包括一个将空间入射光调整成与旋转平台平行的入射光的平行模块、一个将旋转平台平行的入射光调整到耦合进光纤的耦合模块,以及一个控制器;
平行模块包括旋转平台、第一二维可调反射镜、滤波器,第一分束器、第一成像透镜和第一光电探测模块,入射光线从旋转平台上面的第一二维可调反射镜进入,然后再经过滤波器、第一分束器,小部分能量通过第一成像透镜,接着在第一光电探测模块上形成光斑;第一二维可调反射镜的两个正交的旋转轴一个垂直于旋转平台,另一个垂直于旋转平台的径向,通过调整第一二维可调反射镜和旋转平台角度,可以将入射光转换为与旋转平台相平行,并且入射到旋转平台中心;
耦合模块包括第二二维可调反射镜、第二分束器、第二成像透镜、第二光电探测模块和光纤耦合透镜;入射到旋转平台中心的光经过第二二维可调反射镜、第二分束器和光纤耦合透镜,耦合到光纤收发模块或探测器中;第二二维可调反射镜的两个正交的旋转轴,一个与旋转平台平行,另外一个于旋转平台成45度角,将水平于旋转平台的光,调整成垂直于旋转平台的光;
控制器依据光斑在第一光电探测模块和第二光电探测模块中的位置,反馈调整第一二维可调反射镜、第二二维可调反射镜,和旋转平台角度,使光斑保持在光电探测模块正中心。
所述的第一光电探测模块将光斑的位置反馈给控制器,控制器依据光斑的位置调整第一二维可调反射镜,从而使光斑调整到第一光电探测模块中心,保证光线与旋转平台水平;入射到旋转平台中心的光经过第二二维可调反射镜,再经过第二分束器和光纤耦合透镜,耦合到光纤收发模块或探测器中;第二二维可调反射镜的两个正交的旋转轴,与第二二维可调反射镜平面相平行,将水平于旋转平台的光,调整成垂直于旋转平台的光;第二分束器的分光比为10:90,10%的光经过第二成像透镜,投射到第二光电探测模块中;第二光电探测模块将光斑的位置反馈给控制器,控制器依据光斑的位置调整第二二维可调反射镜,使光斑调整到第二光电探测模块中心,保证光线与光纤平行;控制器通过获取第一、第二光电探测模块的中光斑的位置,分别调整第一二维可调反射镜、第二二维可调反射镜和旋转平台,实现大视场角的空间激光到光纤收发模块或探测器中的耦合。
所述的旋转平台中间中空,可以360度旋转;
所述的第一二维可调反射镜、滤波器,第一分束器、第一成像透镜、第一光电探测模块,和第二二维可调反射镜固定在所述的旋转平台;其中所述的第一二维可调反射镜位于旋转平台的边缘,所述的第二二维可调反射镜位于旋转平台的中心。
所述的旋转平台的旋转轴线和被耦合光纤重合。
所述的第二可调反射镜、第二分束器、第二成像透镜、光纤耦合透镜的中心点,与旋转平台旋转轴位于同一个平面。
一种所述的装置的应用,在使用之前进行标定,使光斑位于两个光电探测模块中心时,空间激光能够耦合进光纤收发模块或探测器中;
所述的控制器具有两种控制模式,即搜索模式和跟踪空间激光模式;
搜索模式,需要用户给定旋转平台的旋转角和第一二维可调反射镜每个旋转轴的角度,使第一光电探测模块接收到光信号,然后耦合装置基于这个初值顺序调整第一二维可调反射镜的角度和第二二维可调反射镜的角度,从而实现在用户输入的位置附件进行信号的搜索;
跟踪空间激光模式,初始状态是空间激光已经耦合到光纤中,但是空间激光和耦合装置的位置发生变化,控制器依据第一光电探测模块接收到的亮斑中心点位偏离图像中心点的位置,实时反馈调整第一二维可调反射镜的角度和旋转平台的角度,使亮斑中心点保持在图像中心点,从而保证空间激光与光纤的持续耦合。
本发明具有的有益效果是:
1、本发明可以实现耦合装置在移动过程中,通过实时反馈调节两个反射镜和旋转平台,保持空间激光和光纤(或探测器或收发模块)的耦合。
2、本发明可以实现空间激光的入射角与旋转平面的夹角在正负90度范围变化时,可以实时保持空间激光和光纤(或探测器或收发模块)的耦合。
附图说明
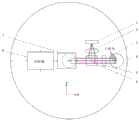
图1为本发明耦合系统的俯视图;
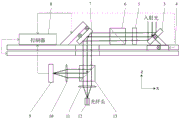
图2为本发明耦合系统横向截面图;
图中:第一光电探测模块1、第一成像透镜2、第一二维可调反射镜3、旋转平台4、滤波器5、第一分束器6、第二二维可调反射镜7、控制器8、第二光电探测模块9、第二成像透镜10、光纤耦合透镜11、光纤收发模块(或探测器) 12、第二分束器13。
具体实施方式
下面结合附图和实施例对本发明做进一步说阐述。
一种超大视场角空间激光至光纤的耦合装置,如图1所示。入射光线从旋转平台4上面的第一二维可调反射镜3进入,然后再经过滤波器5、第一分束器6,10%的能量通过第一成像透镜2,接着在第一光电探测模块1上形成光斑。90%的能量通过第二二维可调反射镜7,如图2所示,进入第二分光镜13。10%的能量又通过第二成像透镜10,在第二光电探测模块9上形成光斑。剩下90%的能量到光纤耦合透镜然后耦合进光纤收发模块或(探测器)12中。
旋转平台4的转子上固定着第一二维可调反射镜3、第二二维可调反射镜7、滤波器5、第一分束器6、第一成像透镜2、第一光电探测模块1、控制器8。旋转平台4可以360度旋转,旋转中心有一个直径10mm的通孔。旋转平台的精度为0.01度。旋转平台4用于粗调旋转角度。
如图2所示,第一二维可调反射镜3平行z轴的旋转可调角度只要大于2度,配合旋转平台4就可以实现大量程高精度的角度控制。垂直于旋转平台径向的旋转轴,可调角度大于45度,就能实现将任意角度入射的光调整到与旋转平面平行。可调反射镜的两个旋转的精度都需要高于10微弧度。第一可调反射镜3的镜片直径可选10 mm。
第一成像透镜2,第二成像透镜10的口径大于10mm,焦距小于旋转平台的半径的一半,将入射的光分别聚焦到第一光电探测模块1、第二光电探测模块9中。
第一光电探测模块1、第二光电探测模块9能够分别返回完整图像给控制器。光电探测模块对通信波段的光敏感,光电探测模块的帧率为100Hz,像素为100万。
控制器8处于搜索模式下,依据用户提供的旋转平台4的角度和第一二维可调反射镜3的两个旋转轴的角度,使第一光电探测模块1能够观测到光斑。然后,第一步,依据光斑在第一光电探测模块1中的位置,控制器8控制第一二维可调反射镜3的两个旋转轴,使光斑调整到第一光电探测模块1的中心。第二步,依据光斑在第二光电探测模块9中的位置,控制器8控制第二二维可调反射镜7的两个旋转轴,使光斑调整到第二光电探测模块9的中心,从而实现空间激光到光纤收发模块(或探测器)12的耦合。
控制器8处于跟踪模式下,初始状态是空间激光与光纤收发模块(或探测器)12能够耦合。但是,耦合装置或者空间激光发生移动时,控制器8依据光斑在第一光电探测模块1的位置变化,实时调整第一二维可调反射镜3的两个旋转轴角度。当第一二维可调反射镜3的旋转轴快要达到最大可调范围时,需要旋转平台4转动,来弥补第一二维可调反射镜3的量程小的限制。
光纤收发模块(或探测器)12、光纤耦合透镜11、第二分束器13,三者的中轴线与旋转平台的中轴线重合。
控制器8与旋转平台4的信号传递与控制反馈通过无线的方式实现。控制器8与第一光电探测模块1、第二光电探测模块9的信号传递可通过无线的方式实现。控制器8与第一二维可调反射镜3、第二二维可调反射镜7的信号传递与控制反馈可通过有线的方式连接。控制器和二维可调反射器的电源通过导电滑环的方式供电。
上述描述中的实施方案可以进一步组合或者替换,且实施方案仅仅是对本发明的优选实施例进行描述,并非对本发明的构思和范围进行限定,在不脱离本发明设计思想的前提下,本领域普通技术人员对本发明的技术方案做出的各种变化和改进,均属于本发明的保护范围。本发明的保护范围由所附权利要求及其任何等同物给出。
Claims (6)
1.一种超大视场角的空间激光至光纤耦合装置,其特征在于:包括一个将空间入射光调整成与旋转平台平行的入射光的平行模块、一个将旋转平台平行的入射光调整到耦合进光纤的耦合模块,以及一个控制器;
平行模块包括旋转平台、第一二维可调反射镜、滤波器,第一分束器、第一成像透镜和第一光电探测模块,入射光线从旋转平台上面的第一二维可调反射镜进入,然后再经过滤波器、第一分束器,小部分能量通过第一成像透镜,接着在第一光电探测模块上形成光斑;第一二维可调反射镜的两个正交的旋转轴一个垂直于旋转平台,另一个垂直于旋转平台的径向,通过调整第一二维可调反射镜和旋转平台角度,可以将入射光转换为与旋转平台相平行,并且入射到旋转平台中心;
耦合模块包括第二二维可调反射镜、第二分束器、第二成像透镜、第二光电探测模块和光纤耦合透镜;入射到旋转平台中心的光经过第二二维可调反射镜、第二分束器和光纤耦合透镜,耦合到光纤收发模块或探测器中;第二二维可调反射镜的两个正交的旋转轴,一个与旋转平台平行,另外一个于旋转平台成45度角,将水平于旋转平台的光,调整成垂直于旋转平台的光;
控制器依据光斑在第一光电探测模块和第二光电探测模块中的位置,反馈调整第一二维可调反射镜、第二二维可调反射镜,和旋转平台角度,使光斑保持在光电探测模块正中心。
2.根据权利要求1所述的耦合装置,其特征在于:所述的第一光电探测模块将光斑的位置反馈给控制器,控制器依据光斑的位置调整第一二维可调反射镜,从而使光斑调整到第一光电探测模块中心,保证光线与旋转平台水平;入射到旋转平台中心的光经过第二二维可调反射镜,再经过第二分束器和光纤耦合透镜,耦合到光纤收发模块或探测器中;第二二维可调反射镜的两个正交的旋转轴,与第二二维可调反射镜平面相平行,将水平于旋转平台的光,调整成垂直于旋转平台的光;第二分束器的分光比为10:90,10%的光经过第二成像透镜,投射到第二光电探测模块中;第二光电探测模块将光斑的位置反馈给控制器,控制器依据光斑的位置调整第二二维可调反射镜,使光斑调整到第二光电探测模块中心,保证光线与光纤平行;控制器通过获取第一、第二光电探测模块的中光斑的位置,分别调整第一二维可调反射镜、第二二维可调反射镜和旋转平台,实现大视场角的空间激光到光纤收发模块或探测器中的耦合。
3.根据权利要求1所述的耦合装置,其特征在于:
所述的旋转平台中间中空,可以360度旋转;所述的第一二维可调反射镜、滤波器,第一分束器、第一成像透镜、第一光电探测模块,和第二二维可调反射镜固定在所述的旋转平台;其中所述的第一二维可调反射镜位于旋转平台的边缘,所述的第二二维可调反射镜位于旋转平台的中心。
4.根据权利要求1所述的耦合装置,其特征在于:所述的旋转平台的旋转轴线和被耦合光纤重合。
5.根据权利要求1所述的耦合装置,其特征在于:所述的第二可调反射镜、第二分束器、第二成像透镜、光纤耦合透镜的中心点,与旋转平台旋转轴位于同一个平面。
6.一种根据权利要求1所述的装置的应用方法,其特征在于:在使用之前进行标定,使光斑位于两个光电探测模块中心时,空间激光能够耦合进光纤收发模块或探测器中;
所述的控制器具有两种控制模式,即搜索模式和跟踪空间激光模式;
搜索模式,需要用户给定旋转平台的旋转角和第一二维可调反射镜每个旋转轴的角度,使第一光电探测模块接收到光信号,然后耦合装置基于这个初值顺序调整第一二维可调反射镜的角度和第二二维可调反射镜的角度,从而实现在用户输入的位置附件进行信号的搜索;
跟踪空间激光模式,初始状态是空间激光已经耦合到光纤中,但是空间激光和耦合装置的位置发生变化,控制器依据第一光电探测模块接收到的亮斑中心点位偏离图像中心点的位置,实时反馈调整第一二维可调反射镜的角度和旋转平台的角度,使亮斑中心点保持在图像中心点,从而保证空间激光与光纤的持续耦合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110078595.2A CN112769480B (zh) | 2021-01-21 | 2021-01-21 | 一种超大视场角的空间激光至光纤耦合装置及应用方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110078595.2A CN112769480B (zh) | 2021-01-21 | 2021-01-21 | 一种超大视场角的空间激光至光纤耦合装置及应用方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112769480A true CN112769480A (zh) | 2021-05-07 |
| CN112769480B CN112769480B (zh) | 2021-11-30 |
Family
ID=75702086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110078595.2A Active CN112769480B (zh) | 2021-01-21 | 2021-01-21 | 一种超大视场角的空间激光至光纤耦合装置及应用方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112769480B (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113595632A (zh) * | 2021-08-10 | 2021-11-02 | 长春理工大学 | 一种基于多单元拼接阵列的空间激光通信方法和系统 |
Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1760636A (zh) * | 2005-11-02 | 2006-04-19 | 哈尔滨工业大学 | 漂移量靶标反馈的长距离二维偏振光电自准直装置和方法 |
| US20060222289A1 (en) * | 2005-03-31 | 2006-10-05 | Fujitsu Limited | Optical switch apparatus and control information updating method therein |
| CN101377414A (zh) * | 2008-10-10 | 2009-03-04 | 哈尔滨工业大学 | 基于光束角漂动态补偿的二维小角度测量装置与方法 |
| CN102589466A (zh) * | 2012-01-17 | 2012-07-18 | 浙江大学 | 一种轮廓的显微方法和装置 |
| CN104181131A (zh) * | 2014-08-15 | 2014-12-03 | 中国科学院上海技术物理研究所 | 红外调制光致发光二维成像光路自动定位校准装置 |
| CN105149772A (zh) * | 2015-10-12 | 2015-12-16 | 维嘉数控科技(苏州)有限公司 | 激光装置、控制系统及稳定激光光路能量和指向的方法 |
| CN106199992A (zh) * | 2015-05-26 | 2016-12-07 | 钱浙滨 | 一种无线光束反射对准方法及装置 |
| US20170371110A1 (en) * | 2016-06-23 | 2017-12-28 | Futurewei Technologies, Inc. | Optical Transceiver With a Mirrored Submount and a Laser Diode for Laser-to-Fiber Coupling |
| CN108333692A (zh) * | 2018-02-08 | 2018-07-27 | 中国科学院光电技术研究所 | 一种空间光至光纤耦合系统 |
| CN108768516A (zh) * | 2018-07-02 | 2018-11-06 | 北京卫星信息工程研究所 | 波长快速可调谐的空间激光通信终端 |
| CN109061831A (zh) * | 2018-09-19 | 2018-12-21 | 西安理工大学 | 一种无线激光通信反射式瞄准跟踪系统及激光瞄准跟踪方法 |
| CN109633858A (zh) * | 2019-02-19 | 2019-04-16 | 浙江大学 | 一种光镊中对射光束焦点对准的装置及方法 |
| CN111596268A (zh) * | 2020-05-08 | 2020-08-28 | 山东大学 | 一种激光光束角度偏移探测装置 |
| CN111600654A (zh) * | 2020-05-29 | 2020-08-28 | 西安理工大学 | 一种基于功率反馈的高效空间光-光纤耦合装置及方法 |
| CN111596456A (zh) * | 2020-05-08 | 2020-08-28 | 山东大学 | 一种激光指向稳定控制系统 |
| CN111865414A (zh) * | 2020-07-13 | 2020-10-30 | 哈尔滨羽容科技有限公司 | 激光通信链路中大气畸变前向反馈补偿系统 |
| CN111940913A (zh) * | 2019-05-15 | 2020-11-17 | 苏州洛博斯特光电科技有限公司 | 激光共焦三维曲面打标方法及装置 |
-
2021
- 2021-01-21 CN CN202110078595.2A patent/CN112769480B/zh active Active
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060222289A1 (en) * | 2005-03-31 | 2006-10-05 | Fujitsu Limited | Optical switch apparatus and control information updating method therein |
| CN1760636A (zh) * | 2005-11-02 | 2006-04-19 | 哈尔滨工业大学 | 漂移量靶标反馈的长距离二维偏振光电自准直装置和方法 |
| CN101377414A (zh) * | 2008-10-10 | 2009-03-04 | 哈尔滨工业大学 | 基于光束角漂动态补偿的二维小角度测量装置与方法 |
| CN102589466A (zh) * | 2012-01-17 | 2012-07-18 | 浙江大学 | 一种轮廓的显微方法和装置 |
| CN104181131A (zh) * | 2014-08-15 | 2014-12-03 | 中国科学院上海技术物理研究所 | 红外调制光致发光二维成像光路自动定位校准装置 |
| CN106199992A (zh) * | 2015-05-26 | 2016-12-07 | 钱浙滨 | 一种无线光束反射对准方法及装置 |
| CN105149772A (zh) * | 2015-10-12 | 2015-12-16 | 维嘉数控科技(苏州)有限公司 | 激光装置、控制系统及稳定激光光路能量和指向的方法 |
| US20170371110A1 (en) * | 2016-06-23 | 2017-12-28 | Futurewei Technologies, Inc. | Optical Transceiver With a Mirrored Submount and a Laser Diode for Laser-to-Fiber Coupling |
| CN108333692A (zh) * | 2018-02-08 | 2018-07-27 | 中国科学院光电技术研究所 | 一种空间光至光纤耦合系统 |
| CN108768516A (zh) * | 2018-07-02 | 2018-11-06 | 北京卫星信息工程研究所 | 波长快速可调谐的空间激光通信终端 |
| CN109061831A (zh) * | 2018-09-19 | 2018-12-21 | 西安理工大学 | 一种无线激光通信反射式瞄准跟踪系统及激光瞄准跟踪方法 |
| CN109633858A (zh) * | 2019-02-19 | 2019-04-16 | 浙江大学 | 一种光镊中对射光束焦点对准的装置及方法 |
| CN111940913A (zh) * | 2019-05-15 | 2020-11-17 | 苏州洛博斯特光电科技有限公司 | 激光共焦三维曲面打标方法及装置 |
| CN111596268A (zh) * | 2020-05-08 | 2020-08-28 | 山东大学 | 一种激光光束角度偏移探测装置 |
| CN111596456A (zh) * | 2020-05-08 | 2020-08-28 | 山东大学 | 一种激光指向稳定控制系统 |
| CN111600654A (zh) * | 2020-05-29 | 2020-08-28 | 西安理工大学 | 一种基于功率反馈的高效空间光-光纤耦合装置及方法 |
| CN111865414A (zh) * | 2020-07-13 | 2020-10-30 | 哈尔滨羽容科技有限公司 | 激光通信链路中大气畸变前向反馈补偿系统 |
Non-Patent Citations (2)
| Title |
|---|
| WENTAO YU; PHIL SURMAN; SAILING HE: "Directional Backlight Generator for Larger Field Angle Autostereoscopic Display", 《2018 PROGRESS IN ELECTROMAGNETICS RESEARCH SYMPOSIUM (PIERS-TOYAMA)》 * |
| 牟瑞欣,张建,安飞,杨芝艳,马丽娜: "多点光子多普勒测速光纤阵列耦合系统设计", 《光学技术》 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113595632A (zh) * | 2021-08-10 | 2021-11-02 | 长春理工大学 | 一种基于多单元拼接阵列的空间激光通信方法和系统 |
| CN113595632B (zh) * | 2021-08-10 | 2023-12-12 | 长春理工大学 | 一种基于多单元拼接阵列的空间激光通信方法和系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112769480B (zh) | 2021-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107356930B (zh) | 一种振镜全景扫描装置及其扫描方法 | |
| US20190257924A1 (en) | Receive path for lidar system | |
| US5465170A (en) | Alignment adjusting system for use in optical system of optical transceiver | |
| US8427657B2 (en) | Device for optical imaging, tracking, and position measurement with a scanning MEMS mirror | |
| CN207096455U (zh) | 一种振镜全景扫描装置 | |
| US11909439B2 (en) | Wavefront sensor with inner detector and outer detector | |
| CN110579872B (zh) | 一种跟瞄系统及调整方法 | |
| US20180372847A1 (en) | Focal region optical elements for high-performance optical scanners | |
| CN106932866B (zh) | 一种硅基光子器件的自动对光装置及方法 | |
| CN110739994B (zh) | 一种自由空间光通信链路建立方法 | |
| CN113296079B (zh) | 一种远距离光电探测系统 | |
| CN102185654A (zh) | 一种激光通信系统 | |
| CN109067452A (zh) | 一种无人机中继激光通信系统 | |
| CN112769480B (zh) | 一种超大视场角的空间激光至光纤耦合装置及应用方法 | |
| US10473923B2 (en) | Focal region optical elements for high-performance optical scanners | |
| CN207923059U (zh) | 固态式环形三维成像装置 | |
| CN114236714B (zh) | 一种基于光束纠正的无线光通信接收装置及接收方法 | |
| CN208588406U (zh) | 一种空间目标三维信息实时探测系统 | |
| CN112835065B (zh) | 一种智能级联量子成像探测系统 | |
| CN111722408B (zh) | 大角度偏转收发一体光纤准直器 | |
| CN110345863A (zh) | 一种固态式环形三维成像装置 | |
| CN109931969A (zh) | 一种空间目标三维信息实时探测系统 | |
| CN118068350B (zh) | 一种远距离红外成像与测距装置及其应用 | |
| CN118068349B (zh) | 一种多波段单站光电定位测量装置 | |
| CN111147136B (zh) | 一种大角度激光目标快速异步定位装置和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |