CN112349143A - 一种车辆碰撞预警终端检测装置 - Google Patents
一种车辆碰撞预警终端检测装置 Download PDFInfo
- Publication number
- CN112349143A CN112349143A CN202011213873.2A CN202011213873A CN112349143A CN 112349143 A CN112349143 A CN 112349143A CN 202011213873 A CN202011213873 A CN 202011213873A CN 112349143 A CN112349143 A CN 112349143A
- Authority
- CN
- China
- Prior art keywords
- module
- data
- vehicle
- navigation system
- precision
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/40—Correcting position, velocity or attitude
- G01S19/41—Differential correction, e.g. DGPS [differential GPS]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
- B60R2011/0294—Apparatus with multi-functionalities, e.g. radio and telephone
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
本发明公开了一种车辆碰撞预警终端检测装置,属于机动车技术领域。该装置包括无损车载安装支架、高精度组合导航系统、信号触发模块、供电模块、数据采集模块、数据解析与打包模块、SD卡存储、车载显示模块、解算显示模块以及无线数传电台。本发明整体安装灵活,拆卸方便,无需增加额外的工装就可以安装在各种规格的待测车辆上。
Description
技术领域
本发明涉及到机动车技术领域,特别涉及一种车辆碰撞预警终端检测装置。
背景技术
目前,各地要鼓励支持道路运输企业在既有三类以上班线客车、旅游包车、危险货物道路运输车辆、农村客运车辆、重型营运客车上安装智能视频监控报警装置,实现对驾驶员不安全行为的自动识别和实时报警。
驾驶员不安全行为除了驾驶中驾驶员自身的一些不安全动作外,还包括忽视前车碰撞预警因素。为此一些智能视频监控终端的生产厂家在对应产品中重点设计了前车碰撞预警模块,以准确、实时的给驾驶员提供预警碰撞。同时该产品本身采集的数据,也为地方交通运输主管部门在事故调查分析、责任追究和本地区道路运输安全政策措施制定方面提供了依据。由此可见,带有前车碰撞预警功能的智能视频监控终端的性能、可靠性等指标至关重要,有必要纳入检测认证管理体系。为此,急需一种定量检测装置对其进行量化测试和评估,为各地推广鉴定、质量筛查和用户选型等证明材料和数据支撑。
目前,针对车辆碰撞预警终端领域,也有一些相关的设计方法和成品,虽作为碰撞预警产品具备一定的推广应用前景,但用其作为检测基准设备去定量评估同领域的其他被测产品,在精度和实时性等方面尚不能满足现行的标准要求。
申请号为CN110979174A的中国专利公开了一种基于雷达探测技术的车辆碰撞检测预警装置,其包括雷达探测器、计算结果采集模块、危险报警数据设定系统、不可避免安全值模块设定模块、角度测量模块和计算系统。将雷达探测器的输出端与激光发射器的输入端连接,雷达探测器的输出端与探测结果数据输出模块的输入端连接,利用数据对比器、测速系统、计算系统和危险报警数据设定系统之家的配合可以将雷达探测的结果生成危险预警的结果,并配合角度测量模块判断实际存在的危险情况。该系统构建比较复杂,激光发射器、反光镜的安装有一定的技术要求,而且,雷达探测器只能靠发射器遇到障碍物反射回来激光进行距离计算,不能够“智能”地判定前方是否是测试车辆,因此不适合作为检测基准设备在实际路段进行精准检测。
公开号为CN108010388A的中国专利公开了基于车联网络的碰撞检测预警方法及碰撞检测预警系统,其采用当前车辆将自身车辆的形式信息通过车联网络进行广播,并且当前车辆接收周边车辆广播的形式信息,根据当前测量与周边车辆的形式信息,预测未来N秒内当前车辆与周边车辆的行驶轨迹点处的安全检测区域是否发生重叠,若有,则发出预警。该方法是通过预测N秒内的行驶轨迹周围的安全区域,检测较为粗略,动态检测精度很差,不适合作为检测基准系统。
也有相关学者针对运动场景下碰撞安全预警问题,研究一种基于DSP的蝗虫视觉神经网络碰撞预警系统。该系统通过视频采集器接收场景视频图像,借助图像处理器提取运动目标,利用此神经网络获取目标逼近行为量,以及利用已有预警检测方案和预警装置发出预警信号。实验结果表明,该预警系统能有效对视域中可能发生的碰撞进行预警。该方法采用视频图像处理(包括运动目标识别)、神经网络技术与已有方案进行匹配预警,实时性不高,同样不能区分前方视野中的目标是否为测试车辆,不适合作为检测基准系统。
发明内容
有鉴于此,本发明提供了一种车辆碰撞预警终端检测装置,该装置的电路结构简单合理,并且易于实现,可以有效检测两车间相对信息;其充分保障了各种工况数据的可靠性和连续性,采集的车辆位置精度可达厘米级、数据更新率高达50Hz。
为了实现上述目的,本发明所采取的技术方案为:
一种车辆碰撞预警终端检测装置,包括无损车载安装支架以及位于固定于无损车载安装支架上方的高精度组合导航系统、信号触发模块、供电模块、数据采集模块、数据解析与打包模块、SD卡存储、车载显示模块、解算显示模块以及无线数传电台;
所述信号触发模块主要用于向高精度组合导航系统发送一个脉冲信号,以触发高精度组合导航系统事件时间戳,用于后期数据对比和结果溯源;
所述高精度组合导航系统用于获取车辆的运动参数;且其内置有4G通信模块,用于实现RTK差分定位,获取厘米级位置精度;
所述无线数传电台用于车辆间位姿数据的传输;
所述解算显示模块主要指运行在电脑端的实时解算、显示及存储软件,该模块在软件地图显示区将两车的运动轨迹进行绘制;同时还实时接收高精度组合导航系统输出的自车位姿数据以及通过无线数传电台传输的前车位姿数据,并解算出碰撞预警信息,将自车位姿数据和碰撞预警信息存储到电脑硬盘中;
所述车载显示模块将来自数据解析与打包模块的车辆运行参数醒目显示;当车辆速度和加速度超过预设的阈值,该车载显示模块将会产生蜂鸣提示信号提醒驾驶员;
所述数据采集模块针对来自高精度导航系统和无线数传电台的车辆运动参数和位姿数据的收集;
所述数据解析与打包模块是对车辆间的位姿数据进行解析,提取出解算所需的数据,并一同打包发送给解算显示模块;
所述SD卡存储模块用于实时存储高精度组合导航系统输出的车辆位姿数据,用于后期数据对比和结果溯源;
所述供电模块为高精度组合导航系统、信号触发模块、供电模块、数据解析与打包模块、SD卡存储模块、车载显示模块、数据采集模块、解算显示模块以及无线数传电台提供能源支撑;
数据采集模块通过串口实时采集高精度组合导航系统输出的定位定姿数据,并将此数据发送至无线数传电台;同时,数据采集模块还通过无线数传电台收集来自其他车辆的定位定姿数据;数据解析与打包模块将来自数据采集模块的数据提取,并重新打包,发送给车载显示模块和解算显示模块;解算显示模块会根据来自数据解析与打包模块的定位定姿数据实时计算两车的相对运动信息并进行延时的修正,最终得到相对更为精确的相对速度和TTC时间信息;
当外部触发信号时,信息触发模块检测到该触发信号后,经过滤波会给高精度导航系统一个适配的脉冲,高精度导航系统信息将其与自身的TTC时间信息对齐,一起发送到数据采集模块并在数据包中最后一帧增加触发标志数据,解算显示模块解析出该帧数据,会自动将计算的结果进行弹窗显示,并存入文件。
进一步的,所述供电模块上设有串联的过大电流防反接电路和软启动电路;所述供电模块将外部电池的供电电压经过大电流防反接电路和软启动电路之后,分别转换为其他模块所需的电压以及1路大电流输出的可调电压输出,1路大电流输出的可调电压输允许用户外接大功率无线数传电台或者其他测试设备。
进一步的,还包括接口扩展模块,所述接口扩展包括RS232串口扩展、统一数据输入接口扩展、外部触发接口扩展以及各路电压信号采集电路。
进一步的,所述无损车载安装支架包括至少两个相互平行的横长杆,横长杆之间通过连接杆固定;所述横长杆上设有沿横长杆方向自由移动的安装板;所述横长杆上设有滑道,安装板和滑道构成滑动连接结构;在横长杆的底部还设有磁铁。
进一步的,所述滑动连接结构包括T型螺栓和滑道;所述滑道为位于横长杆上的T型槽;所述T型螺栓通过法兰螺母固定在安装板上,且T型螺栓的头部嵌在能够使其自由滑动的T型槽内;所述磁铁为包胶磁铁,包胶磁铁的中央位置设有螺纹孔,螺纹孔与T型螺栓螺纹连接,T型螺栓的头部嵌在所述T型槽内。
本发明采取上述技术方案所产生的有益效果在于:
1、本发明中各模块的电路稳定可靠,具有宽电压输入范围,供电模块同时具备防反接和软启动功能,能够使用绝大多数电源供电,用于实时解算的两路串口数据经过统一数据输出接口扩展电路转换为标准USB2.0接口,方便接入绝大多数的笔记本电脑,减少了外置USB转串口线的繁琐,此外由于采用电脑大容量硬盘对测量数据和解算信息进行了存储,可以长时间采集与测试,SD卡存储模块的数据可以用于结果复现测试和溯源。
2、本发明中的各部件均集成固定在一体化工装上,这样,整机对外只需要电源接口、存储卡接口、天线接口,数据接口,具备较好的易用性,更重要的是,该装置的设计将前车和自车设备进行了统一化,即安装设备时无需区分是前车设备还是自车设备,检测前可根据实际情况用软件进行配置,使用更加灵活。
3、本发明由于采用的是RTK差分定位和高精度组合导航系统作为测量的基准,位置精度可以达到厘米级,且数据更新率高达50Hz,比已公开专利中的检测方法精度要高,更重要的是,由于两车间数据传输采用无线数传电台,即使两车之间有其他干扰车辆,仍然不影响检测结果。
4、本发明中的无线数传电台和高精度导航系统中内置4G通信模块可分别用于传输车辆运动参数数据以及接收GNSS基站通过无线网络传输的差分数据信息。
附图说明
图1是本发明实施例中各模块的组成框图。
图2是本发明实施例中前车模块组成框图。
图3是本发明实施例中后车模块组成框图。
图4是本发明实施例中碰撞信息解算流程图。
图5是本发明实施例中大电流防反接和软启动电路图。
图6是本发明实施例中大电流可调电压输出电路图。
图7是本发明实施例中统一数据输出接口扩展电路图。
图8是本发明实施例中无损车载安装支架的结构示意图。
图中:1、安装板,2、横长杆,3、法兰螺母,4、包胶磁铁。
具体实施方式
下面,结合附图和具体实施方式对本发明做进一步的说明。
一种车辆碰撞预警终端检测装置,包括无损车载安装支架以及位于固定于无损车载安装支架上方的高精度组合导航系统、信号触发模块、供电模块、数据采集模块、数据解析与打包模块、SD卡存储、车载显示模块、解算显示模块以及无线数传电台;
所述信号触发模块主要用于向高精度组合导航系统发送一个脉冲信号,以触发高精度组合导航系统事件时间戳,用于后期数据对比和结果溯源;
所述高精度组合导航系统用于获取车辆的运动参数;且其内置有4G通信模块,用于实现RTK差分定位,获取厘米级位置精度;
所述无线数传电台用于车辆间位姿数据的传输;
所述解算显示模块主要指运行在电脑端的实时解算、显示及存储软件,该模块在软件地图显示区将两车的运动轨迹进行绘制;同时还实时接收高精度组合导航系统输出的自车位姿数据以及通过无线数传电台传输的前车位姿数据,并解算出碰撞预警信息,将自车位姿数据和碰撞预警信息存储到电脑硬盘中;
所述车载显示模块将来自数据解析与打包模块的车辆运行参数醒目显示;当车辆速度和加速度超过预设的阈值,该车载显示模块将会产生蜂鸣提示信号提醒驾驶员;
所述数据采集模块针对来自高精度导航系统和无线数传电台的车辆运动参数和位姿数据的收集;
所述数据解析与打包模块是对车辆间的位姿数据进行解析,提取出解算所需的数据,并一同打包发送给解算显示模块;
所述SD卡存储模块用于实时存储高精度组合导航系统输出的车辆位姿数据,用于后期数据对比和结果溯源;
所述供电模块为高精度组合导航系统、信号触发模块、供电模块、数据解析与打包模块、SD卡存储模块、车载显示模块、数据采集模块、解算显示模块以及无线数传电台提供能源支撑;
数据采集模块通过串口实时采集高精度组合导航系统输出的定位定姿数据,并将此数据发送至无线数传电台;同时,数据采集模块还通过无线数传电台收集来自其他车辆的定位定姿数据;数据解析与打包模块将来自数据采集模块的数据提取,并重新打包,发送给车载显示模块和解算显示模块;解算显示模块会根据来自数据解析与打包模块的定位定姿数据实时计算两车的相对运动信息并进行延时的修正,最终得到相对更为精确的相对速度和TTC时间信息;
当外部触发信号时,信息触发模块检测到该触发信号后,经过滤波会给高精度导航系统一个适配的脉冲,高精度导航系统信息将其与自身的TTC时间信息对齐,一起发送到数据采集模块并在数据包中最后一帧增加触发标志数据,解算显示模块解析出该帧数据,会自动将计算的结果进行弹窗显示,并存入文件。
进一步的,所述供电模块上设有串联的过大电流防反接电路和软启动电路;所述供电模块将外部电池的供电电压经过大电流防反接电路和软启动电路之后,分别转换为其他模块所需的电压以及1路大电流输出的可调电压输出,1路大电流输出的可调电压输允许用户外接大功率无线数传电台或者其他测试设备。
进一步的,还包括接口扩展模块,所述接口扩展包括RS232串口扩展、统一数据输入接口扩展、外部触发接口扩展以及各路电压信号采集电路。
进一步的,所述无损车载安装支架包括至少两个相互平行的横长杆,横长杆之间通过连接杆固定;所述横长杆上设有沿横长杆方向自由移动的安装板;所述横长杆上设有滑道,安装板和滑道构成滑动连接结构;在横长杆的底部还设有磁铁。
进一步的,所述滑动连接结构包括T型螺栓和滑道;所述滑道为位于横长杆上的T型槽;所述T型螺栓通过法兰螺母固定在安装板上,且T型螺栓的头部嵌在能够使其自由滑动的T型槽内;所述磁铁为包胶磁铁,包胶磁铁的中央位置设有螺纹孔,螺纹孔与T型螺栓螺纹连接,T型螺栓的头部嵌在所述T型槽内。
下面为一个更具体的实施例:
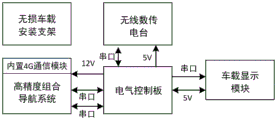
参照图1至图8,本实施例包括无损车载安装支架、高精度组合导航系统、电气控制板、无线数传电台、手动触发模块、解算显示模块和车载显示模块。
所述无损车载安装支架用于将高精度组合导航系统、电气控制板,以及无线数传电台等组成的硬件系统连接到车顶。
所述的高精度组合导航系统用于获取车辆的运动参数,包括位置、速度、姿态、航向角、加速度等信息。内置有4G通信模块,可实现RTK差分定位,以达到厘米级定位。此外,由于测试中,车辆间相对速度变化范围较大,最大可达72km/h,即20m/s,要求检测误差控制在1m以内,误差越小越好,因此高精度组合导航系统2的数据输出频率至少应达到20Hz。为了保留一些安全裕量,在实际应用时,数据输出频率可设置范围达50Hz。
所述的电气控制板包括供电模块、数据采集模块、数据解析与打包模块以及SD卡存储模块,其主要用于给整个硬件系统供电、各种接口扩展、数据解析与打包以及SD卡存储。电气控制板将外部电池的供电电压(15-30V)经过大电流防反接和软启动电路后,分别转换为高精度组合导航系统所需的12V电压、无线数传电台、手动触发模块以及车载显示模块所需的5V电压。接口扩展主要包括RS232串口扩展、统一数据输出接口扩展、外部触发接口扩展。数据解析与打包主要是针对两车的位姿数据进行解析,提取出解算所需的数据,以及分别对自车数据与前车数据接收的时刻分别进行计时,并一同打包发送给解算显示模块,以满足高频率实时解算的要求。SD卡存储用于实时存储高精度组合导航系统输出的车辆位姿数据,用于后期数据复现和结果溯源。
如图5所示为大电流防反接和软启动电路图,在图中,开关管采用的是IRF4905,容许的最大输出电流为74A,能够满足绝大多数测试设备的供电,同时将电源开关选择在控制通道中,通道电流为mA级别,可以选用小电流的按钮开关代替传统的大尺寸大电流开关。当输入电源(+24VIN)正常接入电路时,电流经过Q1内置的二极管、以及R1/R2/R4到电源地(PGND),经过电阻分压,最终稳态时开关管Q1的栅极源极电压Ugs为电阻R1的分压,各电阻阻值适当,可以使得Q1工作在饱和状态,即导通状态。反过来,当将电源的正负极反接,Q1的内置二极管截止,没有产生电流回路,Q1处于高阻态,不能导通,从而能够保护后续设备。在图中由于存在电容C1,使得开关管的栅极源极电压不能发生突变,而是随着时间而变化,则开关管的导通电阻也会慢慢变小,从而使得电压+24VOut缓慢上升,达到“软启动”的效果,能够有效减弱电源接通瞬间对后续电路的不良影响。
在图6中,开关电源芯片采用的是LM2576S,输入电源为+24VOut,输出电压Vadj可以随可调电阻R3阻值的变化而变化,可调电阻的最大阻值为10kΩ,可以大范围调整输出电压,连续输出电流可达3A,能够满足绝大多数无线数传电台的供电。
图7为本发明统一数据输出接口扩展电路图,由于外场测试一般采用便携式笔记本电脑,市面上普通的笔记本电脑不具备串口接口,因此需要USB转串口线,两路数据输出则需要两根USB转串口线,一方面比较占用空间和笔记本接口,另一方面使用较为麻烦,体验不好。本电路通过FD2232D芯片将两路串口信号直接转换为1路USB信号,只需占用1个USB接口就可以满足获取2路数据的要求。
由于高精度组合导航系统数据输出频率较高,且数据量大,因此在电气控制板上设计有高性能单片机(型号为STM32F407VGT6),串口数据接收采用DMA双缓存传输方式,即缓冲0数据填充满之后,自动采用缓冲1进行数据填充,则在主程序中可以处理缓冲0中的数据,当缓存1填充满之后,自动采用缓冲0进行数据填充,主程序中可以处理缓冲0中的数据,如此往复循环,经测试,可以满足波特率460800bps、传输频率200Hz、数据包长度200字节的数据接收与处理。
所述的无线数传电台用于车辆间位姿数据的传输,对于前车而言,无线数传电台用于将前车的位姿数据(由高精度组合导航系统得到)发送给自车;对于自车而言,无线数传电台用于接收前车无线数传电台发送的前车位姿数据。为满足实时性要求,应选择延时较小的无线数传电台。由上述高精度组合导航系统的输出频率建议在50Hz。以50Hz的数据输出频率为例,则无线数传电台延时不能超过一帧数据传输的间隔,否则数据输出频率将失去意义,达不到实时性的要求,因此可以得出延时最大不得超过1÷50=0.02s=20ms,保留一定的安全裕量,建议无线数传电台的延时不超过10ms。
所述的手动触发模块主要用于向高精度组合导航系统发送一个脉冲信号,以触发高精度组合导航系统事件时间戳,结合SD卡存储的数据,可以用于系统标定、后期数据对比和结果溯源。信号触发模块可以同时输出正、负脉冲,支持3.3V和5V两种电平信号。信号触发模块主要有两个作用:(1)产生系统标定触发信号,由于本发明实施例为检测基准系统,需要对系统自身的精度进行标定,此时,需要将信号触发模块的开关设置到手动触发模式;(2)接收碰撞预警终端触发信号,实际检测时,信号触发模块接收碰撞预警终端产生的触发信号,并产生触发脉冲发送到高精度组合导航系统,用于解算车辆碰撞信息。
信号触发模块用于系统标定时,比如车辆碰撞距离信息的标定,具体操作为:在实际检测场地(有固定距离标记线),前车停止在某指定位置(有固定距离标记线),保持静止。将自车按照预定的标定路线行驶,在标记有固定距离的位置附近停止,此时按下手动触发按键,本发明实施例将解算出此时的车辆碰撞距离信息,同时,依据自车安装的高精度组合导航系统输出的带有时间戳的导航数据、前车安装的高精度组合导航系统输出的带有UTC时间的导航数据、固定距离标记线数据,以及现场“平面坐标”下标尺测量的数据对实时解算的碰撞距离信息进行对比,采集多组数据,可实现对本发明实时解算的碰撞距离信息进行标定。
所述的解算显示模块主要指运行在电脑端的实时解算、显示及存储软件,该模块在地图显示区将两车的运动轨迹进行绘制;同时还实时接收高精度组合导航系统输出的自车位姿数据以及通过无线数传电台传输的前车位姿数据,并解算出碰撞信息,将自车位姿数据和碰撞解算信息存储到电脑硬盘中。特别说明的是,为了实现高精度检测,在选择延时较小的无线数传的基础上,在解算时还增加了延时补偿,即,在软件中计算出前车与自车数据之间的延时,通过相对速度信息对相对距离进行修正,精度更高。
具体来说,由于需要实时检测两车之间的相对位置,理论上讲,要求两车的实时位姿数据在同一时刻,而实际上,由于无线数传电台数据传输存在一定的延时,虽然延时参数较小,但两车之间的相对速度变化范围很宽,因此有必要进行延时的补偿。考虑到测试的实际情况,前车和自车的速度在无线数传电台延时的时间内(10ms甚至更短)几乎不会发生变化(因为加速度几乎不变),因此可以认为相对距离修正项为V×t,其中V为自车与前车的速度差,t为无线数传电台的延时,需要注意的是,这里的t不取固定值,而是取自车中电气控制板中的高性能单片机计算的延时为准。
因此,碰撞检测的解算流程如图4所示,开启串口设备之后,解算显示模块实时接收自车电气控制板中高性能单片机打包发送的两车的位姿数据,解析出两车的GPS位置坐标、速度、定时时间信息,然后先通过两车的GPS坐标计算出一个相对距离,再求出两车的速度差以及延时时间,从而得到修正项,增加到相对距离,从而实现高精度的相对距离的获取。相对速度信息为两车的速度差值,TTC碰撞时间为上述修正后的相对距离与相对速度的比值,特别地,当两车静止时,不进行TTC时间的解算。
所述的车载显示模块主要用于醒目显示车辆的运行参数,如速度、加速度等信息,方便驾驶员精准控制车辆的运行。当车辆速度和加速度超过预设的阈值,该显示模块将会产生蜂鸣提示信号提醒驾驶员。
电气控制板中整体电气主要工作流程为:在防反接和软启动电路中,当开关P1关闭时,外部电池的供电电压(15-30V)经过将会稳定输出至后续各电路模块,稳定输出电压值为+24VOut,该电压与电池输入电压整体幅值几乎相等,+24VOut电压信号1路经过开关电源芯片LM2576S-12转换为12V电压,另外1路经过开关电源芯片LM2576S-adj转换为可调电压,电压大小与可调电阻R3相关。
电气控制板中主要的信号流程为:针对前车,单片机通过串口实时采集高精度组合导航系统输出的定位定姿数据,并将此数据通过另外1路串口发出,该路串口连接着无线数传电台,则此定位定姿数据通过无线数传电台发出;同时,单片机还将此定位定姿数据进行解析和数据提取,重新打包之后,通过1路串口发送至前车车内安装的车载显示模块。针对自车,一方面,单片机要通过串口实时采集自车安装的高精度组合导航系统输出的定位定姿数据,并通过另外1路串口TTL_TXD1_A将该数据发出,同时也通过无线数传电台接收前车发来的定位定姿数据,通过串口TTL_TXD2_A将前车数据发出,这两路串口数据经过USB转串口电路,以USB通信方式将两路定位定姿数据发送至解算显示模块,该解算显示模块会实时计算两车的相对运动信息(包括相对位置、速度、时间的计算等),并进行延时的修正,最终得到相对更为精确的相对速度和TTC时间信息,当存在外部触发信号时,自车中的电气控制板则会检测到该触发信号,电气控制板中的单片机将在数据包中最后一帧增加触发标志数据,解算显示模块解析出该帧数据,会自动将计算的结果进行弹窗显示,并存入文件。
参照图8,无损车载安装支架包括两个横长杆2和三个安装板1,横长杆为铝型材,安装板为铝制板。两个横长杆之间固定连接形成可调节安装支架。可调安装支架中的方型螺母将包胶磁铁4固定在可调安装支架的底部。包胶磁铁4具有强大磁吸力,同时由于包胶磁铁4外包覆有环形的橡胶,一方面可以保护磁铁不会划伤车身,另一方面可以增加摩擦力和径向吸引力,可以有效防止支架发生侧滑,包胶磁铁4的规格和数量可以根据具体安装设备的重量等参数进行选取。
由于采用了铝型材支架,T型螺栓通过法兰螺母3固定在安装板上,且T型螺栓的头部嵌在能够使其自由滑动的位于横长杆上的T型槽,同理,包胶磁铁的位置也可以进行调整,因此可以满足绝大多数车辆安装需求。此外,如果安装的设备较重,为了进一步增加磁吸力和摩擦力,可以更改包胶磁铁4的规格或者增加包胶磁铁4的数量。
本实施例根据车顶的尺寸调节包胶磁铁的位置来加强其稳固性;根据检测设备的尺寸调节安装板的位置,并通过法兰螺母锁定。
Claims (5)
1.一种车辆碰撞预警终端检测装置,其特征在于,包括无损车载安装支架以及位于固定于无损车载安装支架上方的高精度组合导航系统、信号触发模块、供电模块、数据采集模块、数据解析与打包模块、SD卡存储、车载显示模块、解算显示模块以及无线数传电台;
所述信号触发模块用于向高精度组合导航系统发送一个脉冲信号,以触发高精度组合导航系统事件时间戳,用于后期数据对比和结果溯源;
所述高精度组合导航系统用于获取车辆的运动参数;且其内置有4G通信模块,用于实现RTK差分定位,获取厘米级位置精度;
所述无线数传电台用于车辆间位姿数据的传输;
所述解算显示模块指运行在电脑端的实时解算、显示及存储软件,该模块在软件地图显示区将两车的运动轨迹进行绘制;同时还实时接收高精度组合导航系统输出的自车位姿数据以及通过无线数传电台传输的前车位姿数据,并解算出碰撞预警信息,将自车位姿数据和碰撞预警信息存储到电脑硬盘中;
所述车载显示模块将来自数据解析与打包模块的车辆运行参数醒目显示;当车辆速度和加速度超过预设的阈值,该车载显示模块将会产生蜂鸣提示信号提醒驾驶员;
所述数据采集模块用于收集来自高精度导航系统和无线数传电台的车辆运动参数和位姿数据;
所述数据解析与打包模块用于车辆间的位姿数据进行解析,提取出解算所需的数据,并一同打包发送给解算显示模块;
所述SD卡存储模块用于实时存储高精度组合导航系统输出的车辆位姿数据,用于后期数据对比和结果溯源;
所述供电模块为高精度组合导航系统、信号触发模块、供电模块、数据解析与打包模块、SD卡存储模块、车载显示模块、数据采集模块、解算显示模块以及无线数传电台提供能源支撑;
数据采集模块通过串口实时采集高精度组合导航系统输出的定位定姿数据,并将此数据发送至无线数传电台;同时,数据采集模块还通过无线数传电台收集来自其他车辆的定位定姿数据;数据解析与打包模块将来自数据采集模块的数据提取,并重新打包,发送给车载显示模块和解算显示模块;解算显示模块会根据来自数据解析与打包模块的定位定姿数据实时计算两车的相对运动信息并进行延时的修正,最终得到相对更为精确的相对速度和TTC时间信息;
当外部触发信号时,信息触发模块检测到该触发信号后,经过滤波会给高精度导航系统一个适配的脉冲,高精度导航系统信息将其与自身的TTC时间信息对齐,一起发送到数据采集模块并在数据包中最后一帧增加触发标志数据,解算显示模块解析出该帧数据,会自动将计算的结果进行弹窗显示,并存入文件。
2.根据权利要求1所述的一种车辆碰撞预警终端检测装置,其特征在于,所述供电模块上设有串联的过大电流防反接电路和软启动电路;所述供电模块将外部电池的供电电压经过大电流防反接电路和软启动电路之后,分别转换为其他模块所需的电压以及1路大电流输出的可调电压输出,1路大电流输出的可调电压输用于用户外接大功率无线数传电台或者其他测试设备。
3.根据权利要求1所述的一种车辆碰撞预警终端检测装置,其特征在于,还包括接口扩展模块,所述接口扩展包括RS232串口扩展、统一数据输入接口扩展、外部触发接口扩展以及各路电压信号采集电路。
4.根据权利要求1所述的一种车辆碰撞预警终端检测装置,其特征在于,所述无损车载安装支架包括至少两个相互平行的横长杆,横长杆之间通过连接杆固定;所述横长杆上设有沿横长杆方向自由移动的安装板;所述横长杆上设有滑道,安装板和滑道构成滑动连接结构;在横长杆的底部还设有磁铁。
5.根据权利要求4所述的一种车辆碰撞预警终端检测装置,其特征在于,所述滑动连接结构包括T型螺栓和滑道;所述滑道为位于横长杆上的T型槽;所述T型螺栓通过法兰螺母固定在安装板上,且T型螺栓的头部嵌在能够使其自由滑动的T型槽内;所述磁铁为包胶磁铁,包胶磁铁的中央位置设有螺纹孔,螺纹孔与T型螺栓螺纹连接,T型螺栓的头部嵌在所述T型槽内。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011213873.2A CN112349143B (zh) | 2020-11-04 | 2020-11-04 | 一种车辆碰撞预警终端检测装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011213873.2A CN112349143B (zh) | 2020-11-04 | 2020-11-04 | 一种车辆碰撞预警终端检测装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112349143A true CN112349143A (zh) | 2021-02-09 |
| CN112349143B CN112349143B (zh) | 2022-05-27 |
Family
ID=74355939
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011213873.2A Active CN112349143B (zh) | 2020-11-04 | 2020-11-04 | 一种车辆碰撞预警终端检测装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112349143B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114155732A (zh) * | 2021-12-28 | 2022-03-08 | 东风汽车有限公司东风日产乘用车公司 | 车辆周围障碍物监测方法、电子设备及存储介质 |
| FR3129219A1 (fr) * | 2021-11-18 | 2023-05-19 | Commissariat à l'Energie Atomique et aux Energies Alternatives | Procédé de localisation d'un véhicule |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107255566A (zh) * | 2017-06-08 | 2017-10-17 | 武汉科技大学 | 一种车载式车辆行驶跑偏检测装置和检测方法 |
| CN108284842A (zh) * | 2017-12-28 | 2018-07-17 | 交通运输部公路科学研究所 | 一种车辆前向防撞系统评价技术指标阈值计算方法 |
| CN108495330A (zh) * | 2018-03-09 | 2018-09-04 | 清华大学 | 一种车-车信息交互通信的碰撞预警可靠性测试方法 |
| CN109406161A (zh) * | 2018-09-13 | 2019-03-01 | 行为科技(北京)有限公司 | 一种基于距离测试的前防卫碰撞测试系统及其测试方法 |
| CN110264783A (zh) * | 2019-06-19 | 2019-09-20 | 中设设计集团股份有限公司 | 基于车路协同的车辆防碰撞预警系统及方法 |
-
2020
- 2020-11-04 CN CN202011213873.2A patent/CN112349143B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107255566A (zh) * | 2017-06-08 | 2017-10-17 | 武汉科技大学 | 一种车载式车辆行驶跑偏检测装置和检测方法 |
| CN108284842A (zh) * | 2017-12-28 | 2018-07-17 | 交通运输部公路科学研究所 | 一种车辆前向防撞系统评价技术指标阈值计算方法 |
| CN108495330A (zh) * | 2018-03-09 | 2018-09-04 | 清华大学 | 一种车-车信息交互通信的碰撞预警可靠性测试方法 |
| CN109406161A (zh) * | 2018-09-13 | 2019-03-01 | 行为科技(北京)有限公司 | 一种基于距离测试的前防卫碰撞测试系统及其测试方法 |
| CN110264783A (zh) * | 2019-06-19 | 2019-09-20 | 中设设计集团股份有限公司 | 基于车路协同的车辆防碰撞预警系统及方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3129219A1 (fr) * | 2021-11-18 | 2023-05-19 | Commissariat à l'Energie Atomique et aux Energies Alternatives | Procédé de localisation d'un véhicule |
| EP4184208A1 (fr) | 2021-11-18 | 2023-05-24 | Commissariat à l'énergie atomique et aux énergies alternatives | Procédé de localisation d'un véhicule |
| CN114155732A (zh) * | 2021-12-28 | 2022-03-08 | 东风汽车有限公司东风日产乘用车公司 | 车辆周围障碍物监测方法、电子设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112349143B (zh) | 2022-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111681426B (zh) | 一种用于交通安全路况感知评估的方法 | |
| CN108226924B (zh) | 基于毫米波雷达的汽车行驶环境探测方法、装置及其应用 | |
| CN112349143B (zh) | 一种车辆碰撞预警终端检测装置 | |
| CN203365672U (zh) | 一种毫米波雷达测试系统 | |
| CN108196260A (zh) | 无人驾驶车辆多传感器融合系统的测试方法和装置 | |
| CN202472863U (zh) | 基于图像信息综合评判的驾驶员疲劳监测网络系统 | |
| CN106585639A (zh) | 行车方法及系统 | |
| CN110796896A (zh) | 停车场车位状态监测系统及监测方法 | |
| CN113362606A (zh) | 一种基于车联网的车路协同防碰撞综合控制系统 | |
| CN113793509B (zh) | 基于运动传感器的路况分析方法、装置、设备及介质 | |
| CN115290340A (zh) | 一种定位前方交通穿行提示功能的测试系统及方法 | |
| CN212083661U (zh) | 一种基于雷达的双模路况预警系统 | |
| CN207617713U (zh) | 一种汽车跟车预警系统及汽车 | |
| CN103522946A (zh) | 一种车载车速监测报警装置 | |
| CN210486905U (zh) | 一种矿井机车定位导航装置 | |
| CN103730011B (zh) | 一种基于激光器的车型识别检测方法及系统 | |
| CN113524198B (zh) | 一种道路施工主动智能防撞预警机器人 | |
| CN215643122U (zh) | 一种新型辅助自动驾驶综合设备 | |
| CN217739327U (zh) | 一种模拟车辆运动的电磁辐射抗扰度测试装置 | |
| CN216646797U (zh) | 毫米波雷达的道路场景测试设备 | |
| CN211087477U (zh) | 交通安全预警监控报警装置 | |
| CN205810137U (zh) | 一种基于车联网的车距防撞预警装置 | |
| CN205015476U (zh) | 一种带有雷达检测功能的hud设备 | |
| CN114545943A (zh) | 一种用于垃圾清理车自动跟随装置的控制系统 | |
| CN113183876A (zh) | 一种预防车辆碰撞预警提示系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20230112 Address after: 050081 testing center, no.589, Zhongshan West Road, Shijiazhuang City, Hebei Province Patentee after: THE 54TH RESEARCH INSTITUTE OF CHINA ELECTRONICS TECHNOLOGY Group Corp. Patentee after: China Netcom Guoshi Technology Service (Hebei) Co.,Ltd. Address before: 050081 testing center, no.589, Zhongshan West Road, Shijiazhuang City, Hebei Province Patentee before: THE 54TH RESEARCH INSTITUTE OF CHINA ELECTRONICS TECHNOLOGY Group Corp. |
|
| TR01 | Transfer of patent right |