CN111617979A - Automatic detection and sorting equipment for concrete slab deformation - Google Patents
Automatic detection and sorting equipment for concrete slab deformation Download PDFInfo
- Publication number
- CN111617979A CN111617979A CN202010548241.5A CN202010548241A CN111617979A CN 111617979 A CN111617979 A CN 111617979A CN 202010548241 A CN202010548241 A CN 202010548241A CN 111617979 A CN111617979 A CN 111617979A
- Authority
- CN
- China
- Prior art keywords
- horizontal
- opposite
- screw
- vertical
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/04—Sorting according to size
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/02—Measures preceding sorting, e.g. arranging articles in a stream orientating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C5/00—Sorting according to a characteristic or feature of the articles or material being sorted, e.g. by control effected by devices which detect or measure such characteristic or feature; Sorting by manually actuated devices, e.g. switches
- B07C5/36—Sorting apparatus characterised by the means used for distribution
- B07C5/361—Processing or control devices therefor, e.g. escort memory
- B07C5/362—Separating or distributor mechanisms
Landscapes
- Sorting Of Articles (AREA)
Abstract
The invention relates to the technical field of concrete slab deformation detection, in particular to automatic concrete slab deformation detection and sorting equipment which comprises a sorting conveying frame, a transverse opposite moving mechanism, a longitudinal moving detection mechanism and a sorting blanking mechanism, wherein a conveying slide way is arranged on the table top of the sorting conveying frame, a sorting slide way is arranged on one side of the center of the conveying slide way, a contact stopper is arranged on one side of the conveying slide way, which is far away from the sorting slide way, a transverse opposite moving mechanism comprises supporting frames symmetrically arranged on two sides of the conveying slide way, and an opposite driving assembly and an opposite guiding assembly respectively arranged on each supporting frame, a longitudinal moving detection mechanism comprises a longitudinal opposite moving assembly symmetrically arranged between the opposite driving assembly and the opposite guiding assembly, each longitudinal opposite moving assembly comprises a detection head, and the technology can automatically detect the surface of a concrete slab in a full range, the detection efficiency is improved, unqualified concrete can be automatically sorted, and the processing efficiency is improved.
Description
Technical Field
The invention relates to the technical field of concrete slab deformation detection, in particular to automatic concrete slab deformation detection and sorting equipment.
Background
In many civil engineering, many buildings or structures all can take place deformation, and these deformations may influence pleasing to the eye and even influence structural safety, and the deformation monitoring devices is very important this moment, and it not only can obtain deformation data by real-time monitoring, and the alarm system that its setting can also be understood promptly informs constructor health safety's the condition, and in concrete slab course of working, because the pressure that concrete dead weight and mobility produced, can lead to the template to warp the displacement, at present, in actual construction, it mainly has following several kinds of modes to observe the template and warp: firstly, the construction personnel are used for visual observation, secondly, the tape measure is used for measuring, thirdly, the measurement instruments such as a level gauge and a total station are used for observing, and the observation must be carried out at any time, so that the phenomenon that the deformation size of the template is too large and exceeds the allowable range of engineering specifications, the quality and the appearance quality of the concrete slab are influenced, the operation is inconvenient, and the detection effect is seriously influenced is avoided.
Disclosure of Invention
The technical problem to be solved by the invention is to provide automatic detection and sorting equipment for the deformation of the concrete slab, the technology can automatically detect the surface of the concrete slab in a full range, the detection efficiency is improved, unqualified concrete can be automatically sorted, and the processing efficiency is improved.
In order to solve the technical problems, the invention provides the following technical scheme: an automatic detection and sorting device for the deformation of a concrete slab comprises a sorting conveying frame, a transverse opposite moving mechanism, a longitudinal moving detection mechanism and a sorting blanking mechanism, the table top of the sorting conveying frame is provided with a conveying slide way, one side of the center of the conveying slide way is provided with a sorting slide way, one side of the conveying slide way, which is far away from the sorting slide way, is provided with a contact head which can contact workpieces and move towards the inside of the sorting slide way, the transverse opposite moving mechanism comprises supporting frames which are symmetrically arranged at the two sides of the conveying slide way, and install drive assembly in opposite directions and the subassembly that leads in opposite directions on every support frame respectively, longitudinal movement detection mechanism is including the symmetry set up in drive assembly in opposite directions and the subassembly that leads in opposite directions between longitudinal movement subassembly in opposite directions, every longitudinal movement subassembly in opposite directions both ends respectively with drive assembly in opposite directions and the work end transmission connection of the subassembly that leads in opposite directions, every longitudinal movement subassembly in opposite directions all includes can be in opposite directions and along the detection head that vertical direction removed.
Preferably, the opposite driving assembly comprises a first bar-shaped vertical frame, a first motor, a driving wheel, a driven wheel and two horizontal opposite plates, the first bar-shaped vertical frame is horizontally arranged at the top of one of the supporting frames, the driving wheel and the driven wheel are respectively vertically arranged at the inner sides of the two ends of the first bar-shaped vertical frame, the driving wheel and the driven wheel can be respectively inserted into the side wall of the first bar-shaped vertical frame through a first rotating shaft in a rotating way, the driving wheel is in transmission connection with the driven wheel through a synchronous belt, the first motor is horizontally arranged on the side wall of the first bar-shaped vertical frame far away from the driving wheel, the output end of the first motor is in transmission connection with the first rotating shaft on the driving wheel, a first horizontal sliding rail which is horizontally arranged is arranged between the driving wheel and the driven wheel, the two ends of the horizontal sliding rail are respectively provided with a first sliding block which can slide, two horizontal opposite plates are symmetrically provided with a first strip-shaped vertical frame close to one side of the opposite guide assembly, a lower transverse plate is arranged below the driving wheel, one end of the lower transverse plate is connected with one of the adjacent first sliding blocks, a lower transverse plate is arranged above the driven wheel, and one ends of the lower transverse plate and the lower transverse plate are respectively connected with one end of each horizontal opposite plate.
Preferably, the direction subassembly includes that the second bar erects frame and second horizontal slide rail in opposite directions, and the second bar erects the top that the frame was one of them support frame of horizontal installation far away from first bar erects the frame, and the second horizontal slide rail is installed on the perpendicular face that is close to first bar erects the frame, and every level is provided with the second slider that can slide on second horizontal slide rail in opposite directions board one end that is close to second horizontal slide rail respectively.
Preferably, each longitudinal opposite moving assembly comprises a horizontal rectangular box, a second motor, a first screw, a second screw and two screw sliding sleeves, the horizontal rectangular box is horizontally arranged at the bottom of the horizontal opposite plate, the first screw and the second screw are symmetrically distributed along the length direction of the horizontal rectangular box, one ends of the first screw and the second screw which are adjacent are connected, the threads of the first screw and the second screw are reversely arranged, one end of the first screw, which is far away from the second screw, can be rotatably inserted into two sides of the horizontal rectangular box and extend outwards, one end of the second screw, which is far away from the first screw, can be rotatably inserted into the inner wall of the horizontal rectangular box, each screw sliding sleeve is respectively arranged on the first screw and the second screw, each screw sliding sleeve is respectively in threaded connection with the first screw and the second screw, one side of each screw sliding sleeve is respectively provided with a vertical moving plate which extends towards the outer side of the horizontal rectangular box, the second motor is horizontally arranged at the end part of the horizontal rectangular box, and the output end of the second motor is in transmission connection with the extending end of the first screw rod.
Preferably, the upper end and the lower end of the inside of each horizontal rectangular box are respectively provided with a third horizontal sliding rail, and the upper end and the lower end of each screw rod sliding sleeve are respectively provided with a third sliding block capable of sliding in each third horizontal sliding rail.
Preferably, the longitudinal movement detection mechanism further comprises a lifting component respectively mounted on each vertical moving plate, each lifting component respectively comprises a vertical rectangular box, a third motor, a threaded sleeve rod, an inner rod, a threaded sleeve jig and a lifting plate, the vertical rectangular box is vertically mounted on the outer wall of each vertical moving plate, the threaded sleeve jig is horizontally mounted at the lower end of the vertical rectangular box, the threaded sleeve rod is vertically inserted into the inner ring of the threaded sleeve jig, the threaded sleeve rod is in threaded connection with the threaded sleeve jig, the lower end of the threaded sleeve rod extends towards the lower part of the vertical rectangular box, the inner rod is vertically arranged on the inner ring of the threaded sleeve rod, two sides of the inner rod are respectively provided with a limit strip vertically and reversely extending along the inner rod, the threaded sleeve rod is provided with a limit groove for each limit strip to abut against and slide, the third motor is vertically mounted at the top of the vertical rectangular box, and the output end of the third motor is connected with the, the lifter plate can the pivoted setting at the lower extreme of screw thread loop bar.
Preferably, every one side of vertical rectangular frame is open structure, and the lifter plate is close to the one end both sides that vertical rectangular frame opened the end and is equipped with the polished rod that is vertical setting respectively, is equipped with the stop collar that is used for supplying every polished rod to walk on the vertical rectangular frame.
Preferably, each detection head comprises a top horizontal plate, a bottom horizontal plate and four detection blocks, the top horizontal plate is horizontally arranged at the bottom of the lifting plate, the bottom horizontal plate is horizontally positioned under the top horizontal plate, each corner of the bottom horizontal plate is respectively connected with each corner of the top horizontal plate through a connecting support, each corner above the bottom horizontal plate is respectively provided with a buffer sleeve penetrating through two surfaces, a vertical sliding column capable of sliding in each buffer sleeve is respectively inserted in each buffer sleeve, the bottom of each vertical sliding column is respectively connected with each detection block, the bottom edge of each detection block is provided with an arc surface, the upper end of each vertical sliding column is respectively provided with a top abutting ring capable of abutting against the upper end of the bottom horizontal plate, the lower end of each vertical sliding column is respectively provided with a bottom abutting ring, and a buffer spring is respectively arranged above each abutting ring, the top of every buffer spring can contradict the setting with the bottom of bottom horizontal plate respectively, and the diameter of every conflict ring is greater than every buffer spring's diameter, and the top of every vertical slip post is provided with the contact head respectively, and the bottom of top horizontal plate is equipped with respectively can with the touch sensor of every contact head contact.
Preferably, one side that the separation slide was kept away from to the transfer slide is equipped with the pneumatic cylinder that is the level and sets up, and the output of pneumatic cylinder is provided with horizontal leading truck, and the output of pneumatic cylinder is connected with horizontal leading truck's center department, supports the contact and is horizontal installation on horizontal leading truck, is equipped with the mouth of wearing that is used for supplying the conflict head to walk on the transfer slide.
Compared with the prior art, the invention has the beneficial effects that: the utility model provides a concrete slab deformation automated inspection sorting facilities, this technique can be automatic carry out the detection of full scope with concrete slab's surface, improve detection efficiency to can carry out automated inspection with unqualified concrete, improve machining efficiency.
Drawings
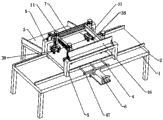
FIG. 1 is a first perspective view of the present invention;
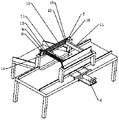
FIG. 2 is a schematic perspective view of the present invention;
FIG. 3 is a top view of the present invention;
FIG. 4 is a side view of the present invention;
FIG. 5 is a partial perspective view of the first embodiment of the present invention;
FIG. 6 is a partial perspective view of the second embodiment of the present invention;
FIG. 7 is a partial perspective view of a longitudinal movement detecting mechanism according to the present invention;
FIG. 8 is a schematic partial perspective view of a longitudinal movement detecting mechanism according to the present invention;
fig. 9 is a schematic partial perspective view of the longitudinal movement detection mechanism of the present invention.
The reference numbers in the figures are: 1-sorting conveying frame; 2-conveying a slide way; 3-sorting slide way; 4-abutting contact; 5-a support frame; 6-hydraulic cylinder; 7-a first bar-shaped vertical frame; 8-a first motor; 9-driving wheel; 10-a driven wheel; 11-horizontal facing plates; 12-a first horizontal slide rail; 13-a first slider; 14-a lower transverse plate; 15-upper transverse plate; 16-a second bar-shaped vertical frame; 17-a second horizontal slide rail; 18-a second slide; 19-horizontal rectangular box; 20-a second motor; 21-a first screw; 22-a second screw; 23-a screw rod sliding sleeve; 24-vertically moving the plate; 25-a third horizontal slide rail; 26-a third slide block; 27-vertical rectangular boxes; 28-a third motor; 29-threaded rods; 30-an inner rod; 31-a thread bushing jig; 32-a lifter plate; 33-a limit bar; 34-a polish rod; 35-a limit sleeve; 36-top horizontal plate; 37-bottom horizontal plate; 38-a detection block; 39-a buffer sleeve; 40-vertical sliding columns; 41-arc surface; 42-top abutment ring; 43-bottom abutment ring; 44-a buffer spring; 45-contact head; 46-touch sensors; 47-lateral guide frame.
Detailed Description
In order to make the objects, technical solutions and advantages of the present invention more apparent, the present invention is described in further detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are merely illustrative of the invention and are not intended to limit the invention.
In the description of the present invention, it should be noted that the terms "center", "upper", "lower", "left", "right", "front", "rear", "vertical", "horizontal", "inner", "outer", and the like indicate orientations or positional relationships based on those shown in the drawings, and are only for convenience of description and simplicity of description, but do not indicate or imply that the referred device or element must have a specific orientation, be constructed in a specific orientation, and be operated, and thus, should not be construed as limiting the present invention. Furthermore, the terms "first," "second," and "third" are used for descriptive purposes only and are not to be construed as indicating or implying relative importance.
Referring to fig. 1 to 9, an automatic concrete slab deformation detection and sorting apparatus comprises a sorting conveying frame 1, a transverse opposite moving mechanism, a longitudinal movement detection mechanism and a sorting blanking mechanism, wherein a conveying slide 2 is arranged on a table top of the sorting conveying frame 1, a sorting slide 3 is arranged on one side of the center of the conveying slide 2, a contact head 4 which can contact a workpiece and move towards the inside of the sorting slide 3 is arranged on one side of the conveying slide 2 away from the sorting slide 3, the transverse opposite moving mechanism comprises support frames 5 symmetrically arranged on two sides of the conveying slide 2, and an opposite driving assembly and an opposite guiding assembly which are respectively arranged on each support frame 5, the longitudinal movement detection mechanism comprises longitudinal opposite moving assemblies symmetrically arranged between the opposite driving assemblies and the opposite guiding assemblies, two ends of each longitudinal opposite moving assembly are respectively in transmission connection with working ends of the opposite driving assembly and the opposite guiding assembly, each of the longitudinal direction moving assemblies includes a detection head capable of moving toward and along a vertical direction.
The opposite driving component comprises a first bar-shaped vertical frame 7, a first motor 8, a driving wheel 9, a driven wheel 10 and two horizontal opposite plates 11, the first bar-shaped vertical frame 7 is horizontally arranged at the top of one of the supporting frames 5, the driving wheel 9 and the driven wheel 10 are respectively vertically arranged at the inner sides of two ends of the first bar-shaped vertical frame 7, the driving wheel 9 and the driven wheel 10 can be respectively inserted on the side wall of the first bar-shaped vertical frame 7 in a rotating way through a first rotating shaft, the driving wheel 9 is in transmission connection with the driven wheel 10 through a synchronous belt, the first motor 8 is horizontally arranged on the side wall of the first bar-shaped vertical frame 7 far away from the driving wheel 9, the output end of the first motor 8 is in transmission connection with the first rotating shaft on the driving wheel 9, a first horizontal sliding rail 12 which is horizontally arranged is arranged between the driving wheel 9 and the driven wheel 10, two ends of the horizontal sliding, one end of each first sliding block 13 is respectively connected with the inner side of a synchronous belt, one side of a first strip-shaped vertical frame 7 close to the opposite guide assembly is symmetrically arranged on two horizontal opposite plates 11, a lower transverse plate 14 is arranged below the driving wheel 9, one end of the lower transverse plate 14 is connected with one adjacent first sliding block 13, a lower transverse plate 14 is arranged above the driven wheel 10, one ends of the lower transverse plate 14 and the lower transverse plate 15 are respectively connected with one end of each horizontal opposite plate 11, when each detection head respectively detects and moves along the width direction of concrete, the first motor 8 is started at the same time, the first motor 8 drives the driving wheel 9 to rotate, the driving wheel 9 drives the driven wheel 10 to rotate through the synchronous belt, the synchronous belt simultaneously drives the two first sliding blocks 13 to move oppositely along a first horizontal sliding rail 12, the lower transverse plate 14 and the lower transverse plate 14 are respectively driven to move oppositely through each first sliding block 13, through lower diaphragm 14 and lower diaphragm 14 drive two levels simultaneously and move towards board 11 in opposite directions, make every detection head on the vertical removal subassembly that moves towards move along the length direction of concrete, make detect the head and can detect along the upper surface of concrete comprehensively.
The guide assembly in opposite directions includes that the second bar erects frame 16 and second horizontal sliding rail 17, the second bar erects the top that frame 16 is one of them support frame 5 of horizontal installation keeping away from first bar erects frame 7, second horizontal sliding rail 17 is installed on the perpendicular face that is close to first bar erects frame 7, every level is provided with the second slider 18 that can slide on second horizontal sliding rail 17 near the one end of second horizontal sliding rail 17 respectively towards board 11, when every level moves in opposite directions board 11, be provided with second slider 18 on board 11 in opposite directions through every level and carry out spacing displacement along second horizontal sliding rail 17 respectively.
Each longitudinal opposite moving assembly comprises a horizontal rectangular box 19, a second motor 20, a first screw 21, a second screw 22 and two screw sliding sleeves 23, the horizontal rectangular box 19 is horizontally arranged at the bottom of the horizontal opposite plate 11, the first screw 21 and the second screw 22 are symmetrically distributed along the length direction of the horizontal rectangular box 19, the adjacent ends of the first screw 21 and the second screw 22 are connected, the threads of the first screw 21 and the second screw 22 are arranged in opposite directions, one end of the first screw 21, far away from the second screw 22, can be rotatably inserted into two sides of the horizontal rectangular box 19 and extend outwards, one end of the second screw 22, far away from the first screw 21, can be rotatably inserted into the inner wall of the horizontal rectangular box 19, each screw sliding sleeve 23 is respectively arranged on the first screw 21 and the second screw 22, each screw sliding sleeve 23 is respectively in threaded connection with the first screw 21 and the second screw 22, one side of each screw rod sliding sleeve 23 is respectively provided with a vertical moving plate 24 extending towards the outer side of the horizontal rectangular box 19, the second motor 20 is horizontally arranged at the end part of the horizontal rectangular box 19, and the output end of the second motor 20 is in transmission connection with the extending end of the first screw rod 21.
The upper end and the lower end of the inside of each horizontal rectangular box 19 are respectively provided with a third horizontal slide rail 25, the upper end and the lower end of each screw rod sliding sleeve 23 are respectively provided with a third slide block 26 capable of sliding in the inside of each third horizontal slide rail 25, when each detection head respectively detects, the second motor 20 is started to drive the first screw rod 21 and the second screw rod 22 to rotate, the threads of the first screw rod 21 and the second screw rod 22 are reversely arranged, when the first screw rod 21 and the second screw rod 22 synchronously rotate, the two screw rod sliding sleeves 23 move oppositely, the two screw rod sliding sleeves 23 respectively drive each detection head to move oppositely along the width direction of the concrete slab, each detection head respectively detects along the width direction of the concrete slab, and each set third slide block 26 respectively carries out limit movement along each third horizontal slide rail 25.
The longitudinal movement detection mechanism further comprises lifting components respectively installed on each vertical moving plate 24, each lifting component respectively comprises a vertical rectangular box 27, a third motor 28, a threaded sleeve rod 29, an inner rod 30, a threaded sleeve jig 31 and a lifting plate 32, the vertical rectangular box 27 is vertically installed on the outer wall of each vertical moving plate 24, the threaded sleeve jig 31 is horizontally installed at the lower end of each vertical rectangular box 27, the threaded sleeve rod 29 is vertically inserted into the inner ring of the threaded sleeve jig 31, the threaded sleeve rod 29 is in threaded connection with the threaded sleeve jig 31, the lower end of the threaded sleeve rod 29 extends towards the lower part of each vertical rectangular box 27, the inner rod 30 is vertically arranged at the inner ring of the threaded sleeve rod 29, the two sides of the inner rod 30 are respectively provided with a limiting strip 33 vertically and reversely extending along the inner rod 30, each threaded sleeve rod 29 is provided with a limiting groove for each limiting strip 33 to abut against and slide, the third motor 28 is vertically installed at the top of each vertical rectangular box 27, the output end of the third motor 28 is connected to the upper end of the inner rod 30, and the lifting plate 32 is rotatably disposed at the lower end of the threaded sleeve rod 29.
One side of each vertical rectangular frame is of an open structure, two sides of one end, close to the open end of the vertical rectangular frame, of the lifting plate 32 are respectively provided with a polish rod 34 which is vertically arranged, the vertical rectangular frame is provided with a limit sleeve 35 for each polish rod 34 to pass through, when the conveying slide way 2 conveys the concrete until the concrete is conveyed to a position between the two supporting frames 5, each detection head is respectively positioned at each corner above the concrete, each third motor 28 is started, the inner rod 30 is driven to rotate by each third motor 28, each limit strip 33 on the inner rod 30 respectively props against a limit groove on the threaded sleeve rod 29 to enable the threaded sleeve rod 29 to move downwards along the threaded sleeve jig 31, the lifting plate 32 is driven to move downwards through the threaded sleeve rod 29, and each set polish rod 34 carries out limiting movement along each limiting sleeve 35 respectively, so that each detection head abuts against the upper surface of the concrete respectively to be detected.
Each detection head comprises a top horizontal plate 36, a bottom horizontal plate 37 and four detection blocks 38, the top horizontal plate 36 is horizontally arranged at the bottom of the lifting plate 32, the bottom horizontal plate 37 is horizontally positioned under the top horizontal plate 36, each corner of the bottom horizontal plate 37 is respectively connected with each corner of the top horizontal plate 36 through a connecting bracket, each corner above the bottom horizontal plate 37 is respectively provided with a buffer sleeve 39 penetrating through two surfaces, a vertical sliding column 40 capable of sliding in each buffer sleeve 39 is respectively inserted in each buffer sleeve 39, the bottom of each vertical sliding column 40 is respectively connected with each detection block 38, the bottom edge of each detection block 38 is provided with an arc surface 41, the upper end of each vertical sliding column 40 is respectively provided with a top contact ring 42 capable of abutting against the upper end of the bottom horizontal plate 37, the lower end of each vertical sliding column 40 is respectively provided with a bottom contact ring 43, a buffer spring 44 is respectively arranged above each abutting ring, the top of each buffer spring 44 can be respectively abutted against the bottom of the bottom horizontal plate 37, the diameter of each abutting ring is larger than that of each buffer spring 44, the top of each vertical sliding column 40 is respectively provided with a contact head 45, the bottom of the top horizontal plate 36 is respectively provided with a touch sensor 46 which can be contacted with each contact head 45, each detection block 38 is respectively and slidably abutted against the upper surface of the concrete when each detection head detects, each vertical sliding column 40, the buffer springs 44, the top abutting ring 42 and the bottom abutting ring 43 are arranged to buffer and abut against the abutting blocks on the upper surface of the concrete, when the upper surface of the concrete deforms, the contact head 45 at the top of the vertical sliding column 40 can contact with the touch sensor, and at the moment, the touch sensor can convey data to a control console, the staff of being convenient for detects.
One side that separation slide 3 was kept away from to transfer slide 2 is equipped with pneumatic cylinder 6 that is the level setting, the output of pneumatic cylinder 6 is provided with horizontal leading truck 47, the output of pneumatic cylinder 6 is connected with horizontal leading truck 47's center department, conflict head 4 is horizontal installation on horizontal leading truck 47, be equipped with the mouth of wearing that is used for supplying conflict head 4 to walk on the transfer slide 2, detect out the unqualified back of concrete deformation when detecting the head, it drives horizontal leading truck 47 horizontal migration to start pneumatic cylinder 6, it supports contact 4 conflict concrete slab to drive through horizontal leading truck 47, push separation on the separation slide 3 with unqualified concrete slab.
The working principle is as follows: when the concrete is conveyed by the conveying slide way 2 until the concrete is conveyed between the two support frames 5, each detection head is respectively positioned at each corner above the concrete, each third motor 28 is started, each third motor 28 drives the inner rod 30 to rotate, each limit strip 33 on the inner rod 30 respectively abuts against a limit groove on the threaded sleeve rod 29 to enable the threaded sleeve rod 29 to move downwards along the threaded sleeve jig 31, the threaded sleeve rod 29 drives the lifting plate 32 to move downwards, each set polished rod 34 respectively performs limit movement along each limit sleeve 35 to enable each detection head to respectively abut against the upper surface of the concrete for detection, each set detection block 38 respectively slidably abuts against the upper surface of the concrete when each detection head performs detection, each set vertical sliding column 40, each set buffer spring 44, each set top abutting ring 42 and each set bottom abutting ring 43 enable each abutting block to buffer the abutting surface of the concrete, when the upper surface of the concrete deforms, the contact head 45 at the top of the vertical sliding column 40 contacts with the touch sensor, and at the moment, the touch sensor conveys data to the console, so that a worker can conveniently detect the data, when each detection head detects the data respectively, the second motor 20 is started to drive the first screw 21 and the second screw 22 to rotate, because the threads of the first screw 21 and the second screw 22 are arranged in a reverse direction, when the first screw 21 and the second screw 22 rotate synchronously, the two screw sliding sleeves 23 move oppositely, each detection head is driven to move oppositely along the width direction of the concrete slab through the two screw sliding sleeves 23, each detection head detects the data along the width direction of the concrete slab, each third slide block 26 is arranged to move along each third horizontal slide rail 25 in a limiting way, when each detection head detects and moves along the width direction of the concrete, meanwhile, by starting the first motor 8, the first motor 8 drives the driving wheel 9 to rotate, the driving wheel 9 drives the driven wheel 10 to rotate through the synchronous belt, the synchronous belt simultaneously drives the two first sliders 13 to move oppositely along the first horizontal slide rail 12, each first slider 13 respectively drives the lower transverse plate 14 and the lower transverse plate 14 to move oppositely, the lower transverse plate 14 and the lower transverse plate 14 simultaneously drive the two horizontal opposite plates 11 to move oppositely, each detection head on the longitudinal opposite moving assembly moves along the length direction of the concrete, the detection heads can comprehensively detect along the upper surface of the concrete, when each horizontal opposite plate 11 moves oppositely, the second slider 18 arranged on each horizontal opposite plate 11 respectively performs limited movement along the second horizontal slide rail 17, when the detection head detects that the concrete is unqualified in deformation, the hydraulic cylinder 6 is started to drive the transverse guide frame 47 to move horizontally, the contact 4 is driven to touch the concrete slab through the transverse guide frame 47, and the unqualified concrete slab is pushed into the sorting slideway 3 for sorting.
Claims (9)
1. The automatic detection and separation equipment for the deformation of the concrete slabs is characterized by comprising a separation conveying frame (1), a transverse opposite moving mechanism, a longitudinal moving detection mechanism and a separation blanking mechanism, wherein a conveying slide way (2) is arranged on a table top of the separation conveying frame (1), a separation slide way (3) is arranged on one side of the center of the conveying slide way (2), a butting contact (4) which can butt against a workpiece and moves towards the inside of the separation slide way (3) is arranged on one side, away from the separation slide way (3), of the conveying slide way (2), the transverse opposite moving mechanism comprises supporting frames (5) which are symmetrically arranged on two sides of the conveying slide way (2), opposite driving assemblies and opposite guiding assemblies which are respectively arranged on each supporting frame (5), and the longitudinal opposite moving detection mechanism comprises longitudinal opposite moving assemblies which are symmetrically arranged between the opposite driving assemblies and the opposite guiding assemblies, the two ends of each longitudinal opposite moving assembly are in transmission connection with the working ends of the opposite driving assembly and the opposite guiding assembly respectively, and each longitudinal opposite moving assembly comprises a detection head which can move in opposite directions and along the vertical direction.
2. The automatic detection and separation equipment for the deformation of the concrete slab as claimed in claim 1, wherein the opposite driving assembly comprises a first bar-shaped vertical frame (7), a first motor (8), a driving wheel (9), a driven wheel (10) and two horizontal opposite plates (11), the first bar-shaped vertical frame (7) is horizontally installed at the top of one of the support frames (5), the driving wheel (9) and the driven wheel (10) are respectively vertically positioned at the inner sides of the two ends of the first bar-shaped vertical frame (7), the driving wheel (9) and the driven wheel (10) are respectively inserted on the side wall of the first bar-shaped vertical frame (7) in a rotatable manner through a first rotating shaft, the driving wheel (9) is in transmission connection with the driven wheel (10) through a synchronous belt, the first motor (8) is horizontally installed on the side wall of the first bar-shaped vertical frame (7) far away from the driving wheel (9), the output end of the first motor (8) is in transmission connection with the first rotating shaft on the driving wheel, be equipped with between action wheel (9) and the follow driving wheel (10) and be first horizontal slide rail (12) that the level set up, the both ends of horizontal slide rail are provided with respectively can be in first horizontal slide rail (12) inside gliding first slider (13), the one end of every first slider (13) is connected in the inboard of hold-in range respectively, two horizontal opposite plate (11) symmetries are provided with one side that first bar erects frame (7) is close to opposite direction subassembly, the below of action wheel (9) is provided with lower diaphragm (14), the one end of lower diaphragm (14) is connected with adjacent one of them first slider (13), the top of following driving wheel (10) is equipped with lower diaphragm (14), the one end of lower diaphragm (14) and lower diaphragm (15) is connected with the one end of every horizontal opposite plate (11) respectively.
3. The automatic detection and sorting equipment for the deformation of the concrete slab as claimed in claim 2, characterized in that the opposite guide assembly comprises a second bar-shaped vertical frame (16) and a second horizontal sliding rail (17), the second bar-shaped vertical frame (16) is horizontally installed on the top of one of the support frames (5) far away from the first bar-shaped vertical frame (7), the second horizontal sliding rail (17) is installed on the vertical surface close to the first bar-shaped vertical frame (7), and a second sliding block (18) capable of sliding on the second horizontal sliding rail (17) is arranged at one end of each horizontal opposite plate (11) close to the second horizontal sliding rail (17).
4. The automatic detection and separation equipment for the deformation of the concrete slab as claimed in claim 3, wherein each longitudinal moving assembly comprises a horizontal rectangular box (19), a second motor (20), a first screw (21), a second screw (22) and two screw rod sliding sleeves (23), the horizontal rectangular box (19) is horizontally arranged at the bottom of the horizontal opposite plate (11), the first screw (21) and the second screw (22) are symmetrically distributed along the length direction of the horizontal rectangular box (19), the adjacent ends of the first screw (21) and the second screw (22) are connected, the threads of the first screw (21) and the second screw (22) are reversely arranged, one end of the first screw (21) far away from the second screw (22) can be rotatably inserted into two surfaces of the horizontal rectangular box (19) and extend outwards, one end of the second screw (22) far away from the first screw (21) can be rotatably inserted into the inner wall of the horizontal rectangular box (19), every lead screw sliding sleeve (23) sets up respectively on first screw rod (21) and second screw rod (22), every lead screw sliding sleeve (23) respectively with first screw rod (21) and second screw rod (22) threaded connection, one side of every lead screw sliding sleeve (23) is equipped with vertical movable plate (24) that extend to horizontal rectangle case (19) outside respectively, second motor (20) are the tip of horizontal installation in horizontal rectangle case (19), the output of second motor (20) is connected with the extension end transmission of first screw rod (21).
5. The automatic detection and sorting equipment for the deformation of the concrete slab as claimed in claim 4, characterized in that the upper end and the lower end of the inside of each horizontal rectangular box (19) are respectively provided with a third horizontal sliding rail (25), and the upper end and the lower end of each screw rod sliding sleeve (23) are respectively provided with a third sliding block (26) capable of sliding in the inside of each third horizontal sliding rail (25).
6. The automatic detection and separation equipment for the deformation of the concrete slab as claimed in claim 5, wherein the longitudinal movement detection mechanism further comprises a lifting assembly respectively mounted on each vertical moving plate (24), each lifting assembly respectively comprises a vertical rectangular box (27), a third motor (28), a threaded sleeve rod (29), an inner rod (30), a threaded sleeve jig (31) and a lifting plate (32), the vertical rectangular box (27) is vertically mounted on the outer wall of the vertical moving plate (24), the threaded sleeve jig (31) is horizontally mounted at the lower end of the vertical rectangular box (27), the threaded sleeve rod (29) is vertically inserted into the inner ring of the threaded sleeve jig (31), the threaded sleeve rod (29) is in threaded connection with the threaded sleeve jig (31), the lower end of the threaded sleeve rod (29) extends to the lower part of the vertical rectangular box (27), the inner rod (30) is vertically arranged at the inner ring of the threaded sleeve rod (29), the both sides of interior pole (30) are provided with respectively along the vertical reverse spacing strip (33) that extend of interior pole (30), are equipped with on screw loop bar (29) to be used for supplying every spacing strip (33) to contradict and gliding spacing groove, and third motor (28) are vertical the top of installing at vertical rectangle case (27), and the output of third motor (28) is connected with the upper end of interior pole (30), and lifter plate (32) can the pivoted setting at the lower extreme of screw loop bar (29).
7. The automatic detection and separation equipment for the deformation of the concrete slabs as claimed in claim 6, wherein one side of each vertical rectangular frame is of an open structure, the two sides of one end, close to the open end of the vertical rectangular frame, of the lifting plate (32) are respectively provided with a polish rod (34) which is vertically arranged, and the vertical rectangular frame is provided with a limit sleeve (35) for each polish rod (34) to pass through.
8. The automatic detection and separation equipment for the deformation of the concrete slab as claimed in claim 7, wherein each detection head comprises a top horizontal plate (36), a bottom horizontal plate (37) and four detection blocks (38), the top horizontal plate (36) is horizontally installed at the bottom of the lifting plate (32), the bottom horizontal plate (37) is horizontally positioned right below the top horizontal plate (36), each corner of the bottom horizontal plate (37) is connected with each corner of the top horizontal plate (36) through a connecting bracket, a buffer sleeve (39) penetrating through two surfaces is arranged at each corner above the bottom horizontal plate (37), a vertical sliding column (40) capable of sliding in each buffer sleeve (39) is inserted in each buffer sleeve (39), and the bottom of each vertical sliding column (40) is connected with each detection block (38), the bottom edge of every detection piece (38) is provided with arcwall face (41), the upper end of every vertical sliding column (40) is provided with top conflict ring (42) that can conflict bottom horizontal plate (37) upper end respectively, the lower extreme of every vertical sliding column (40) is equipped with bottom conflict ring (43) respectively, the top of every conflict ring is equipped with buffer spring (44) respectively, the top of every buffer spring (44) can conflict the setting with the bottom of bottom horizontal plate (37) respectively, the diameter of every conflict ring is greater than the diameter of every buffer spring (44), the top of every vertical sliding column (40) is provided with contact head (45) respectively, the bottom of top horizontal plate (36) is equipped with touch sensor (46) that can contact with every contact head (45) respectively.
9. The automatic detection and separation equipment for the deformation of the concrete slab according to claim 8 is characterized in that one side, away from the separation slide (3), of the conveying slide (2) is provided with a hydraulic cylinder (6) which is horizontally arranged, the output end of the hydraulic cylinder (6) is provided with a transverse guide frame (47), the output end of the hydraulic cylinder (6) is connected with the center of the transverse guide frame (47), the contact (4) is horizontally arranged on the transverse guide frame (47), and a penetrating hole for the contact (4) to penetrate through is formed in the conveying slide (2).
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010548241.5A CN111617979A (en) | 2020-06-16 | 2020-06-16 | Automatic detection and sorting equipment for concrete slab deformation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010548241.5A CN111617979A (en) | 2020-06-16 | 2020-06-16 | Automatic detection and sorting equipment for concrete slab deformation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111617979A true CN111617979A (en) | 2020-09-04 |
Family
ID=72267321
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010548241.5A Withdrawn CN111617979A (en) | 2020-06-16 | 2020-06-16 | Automatic detection and sorting equipment for concrete slab deformation |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111617979A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112246645A (en) * | 2020-09-30 | 2021-01-22 | 湖南洪盛源油茶科技股份有限公司 | Tea-oil tree that screens according to seedling height selects seedling equipment |
| CN113909145A (en) * | 2021-09-23 | 2022-01-11 | 无锡昌鼎电子有限公司 | Testing device for surface of semiconductor wafer |
| CN118078064A (en) * | 2024-04-28 | 2024-05-28 | 泉州量子密码生物科技有限公司 | Far infrared biological wave mattress and detection equipment thereof |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004301683A (en) * | 2003-03-31 | 2004-10-28 | Ntn Corp | Warp inspection device for plate components |
| CN104776823A (en) * | 2015-05-08 | 2015-07-15 | 河海大学 | Detecting device and detecting method for surface evenness of gate |
| CN107576288A (en) * | 2017-09-23 | 2018-01-12 | 江苏宏宝锻造股份有限公司 | A kind of workpiece flatness detecting device |
| CN207357616U (en) * | 2017-10-12 | 2018-05-15 | 广东冠星陶瓷企业有限公司 | A kind of full-automatic separated time output device of multistation different size ceramic tile |
| CN208012582U (en) * | 2018-04-03 | 2018-10-26 | 南京科杰建设工程质量检测有限公司 | A kind of concrete plate device for detecting deformation |
| CN208695654U (en) * | 2018-06-25 | 2019-04-05 | 南京林业大学 | Plate flatness detecting device |
| CN209214523U (en) * | 2019-01-23 | 2019-08-06 | 无锡市正峰特种印刷有限公司 | A kind of novel pasting board detection device |
| CN110823169A (en) * | 2019-11-25 | 2020-02-21 | 湖州华科建设工程质量检测有限公司 | Building engineering quality flatness detection device |
| CN210464347U (en) * | 2019-08-13 | 2020-05-05 | 邳州市恒成木业有限公司 | Panel roughness testing platform |
-
2020
- 2020-06-16 CN CN202010548241.5A patent/CN111617979A/en not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004301683A (en) * | 2003-03-31 | 2004-10-28 | Ntn Corp | Warp inspection device for plate components |
| CN104776823A (en) * | 2015-05-08 | 2015-07-15 | 河海大学 | Detecting device and detecting method for surface evenness of gate |
| CN107576288A (en) * | 2017-09-23 | 2018-01-12 | 江苏宏宝锻造股份有限公司 | A kind of workpiece flatness detecting device |
| CN207357616U (en) * | 2017-10-12 | 2018-05-15 | 广东冠星陶瓷企业有限公司 | A kind of full-automatic separated time output device of multistation different size ceramic tile |
| CN208012582U (en) * | 2018-04-03 | 2018-10-26 | 南京科杰建设工程质量检测有限公司 | A kind of concrete plate device for detecting deformation |
| CN208695654U (en) * | 2018-06-25 | 2019-04-05 | 南京林业大学 | Plate flatness detecting device |
| CN209214523U (en) * | 2019-01-23 | 2019-08-06 | 无锡市正峰特种印刷有限公司 | A kind of novel pasting board detection device |
| CN210464347U (en) * | 2019-08-13 | 2020-05-05 | 邳州市恒成木业有限公司 | Panel roughness testing platform |
| CN110823169A (en) * | 2019-11-25 | 2020-02-21 | 湖州华科建设工程质量检测有限公司 | Building engineering quality flatness detection device |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112246645A (en) * | 2020-09-30 | 2021-01-22 | 湖南洪盛源油茶科技股份有限公司 | Tea-oil tree that screens according to seedling height selects seedling equipment |
| CN112246645B (en) * | 2020-09-30 | 2021-11-30 | 湖南洪盛源油茶科技股份有限公司 | Tea-oil tree that screens according to seedling height selects seedling equipment |
| CN113909145A (en) * | 2021-09-23 | 2022-01-11 | 无锡昌鼎电子有限公司 | Testing device for surface of semiconductor wafer |
| CN113909145B (en) * | 2021-09-23 | 2022-08-05 | 无锡昌鼎电子有限公司 | Testing device for surface of semiconductor wafer |
| CN118078064A (en) * | 2024-04-28 | 2024-05-28 | 泉州量子密码生物科技有限公司 | Far infrared biological wave mattress and detection equipment thereof |
| CN118078064B (en) * | 2024-04-28 | 2024-07-12 | 泉州量子密码生物科技有限公司 | Far infrared biological wave mattress and detection equipment thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111617979A (en) | Automatic detection and sorting equipment for concrete slab deformation | |
| CN107379285B (en) | A kind of ceramic tile automatic cutting device | |
| CN110307814B (en) | Full-automatic contact type measuring device and method | |
| CN113155112A (en) | House construction engineering reconnaissance measuring device | |
| CN114252339B (en) | Pressure detection system and method for concrete detection | |
| CN216448779U (en) | Dedicated gap verifying attachment of elevator inspection | |
| CN209427659U (en) | Ceramic tile surface pattern detection machine, which is matched, applies jacking conveying equipment | |
| CN206131969U (en) | Detect T shape holecoaxiality's device | |
| CN214502945U (en) | Thickness detection equipment for engineering supervision | |
| CN102183187A (en) | Method for assembling and positioning large-size machine tool body | |
| CN213363642U (en) | Automatic detection device with lifting mechanism | |
| CN208520302U (en) | Special-shaped part rapid size detection device | |
| CN220136233U (en) | Floor thickness measuring device for engineering supervision | |
| CN114485504B (en) | Engine piston detection equipment | |
| CN221100305U (en) | Concrete quality detection device for building engineering | |
| CN218179916U (en) | Workpiece thickness detection mechanism | |
| CN112945093B (en) | Precise workpiece detection table and operation system thereof | |
| CN221124473U (en) | Walking board surface defect detection device | |
| CN212390984U (en) | Longitudinal beam detection device | |
| CN218460991U (en) | Aluminum part machining and cutting equipment | |
| CN211953987U (en) | Detection frock in core clearance | |
| CN219511573U (en) | Glass exploratory hole device | |
| CN110895155B (en) | Triaxial moving mechanism for strip steel on-line detection | |
| CN213874235U (en) | Optical lens thickness detection device for fine grinding lower hem machine | |
| CN218726715U (en) | Multifunctional surface detection platform |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20200904 |
|
| WW01 | Invention patent application withdrawn after publication |