CN111243268B - 用于缓解道路上的交通振荡的方法和系统 - Google Patents
用于缓解道路上的交通振荡的方法和系统 Download PDFInfo
- Publication number
- CN111243268B CN111243268B CN201911190053.3A CN201911190053A CN111243268B CN 111243268 B CN111243268 B CN 111243268B CN 201911190053 A CN201911190053 A CN 201911190053A CN 111243268 B CN111243268 B CN 111243268B
- Authority
- CN
- China
- Prior art keywords
- traffic
- vehicle
- mitigation
- road
- controllable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000000116 mitigating effect Effects 0.000 title claims abstract description 385
- 230000010355 oscillation Effects 0.000 title claims abstract description 82
- 238000000034 method Methods 0.000 title claims abstract description 66
- 238000011144 upstream manufacturing Methods 0.000 claims description 67
- 230000033001 locomotion Effects 0.000 claims description 49
- 230000007704 transition Effects 0.000 claims description 29
- 230000015654 memory Effects 0.000 claims description 26
- 230000008569 process Effects 0.000 claims description 13
- 238000009826 distribution Methods 0.000 claims description 11
- 238000012544 monitoring process Methods 0.000 claims description 8
- 239000003999 initiator Substances 0.000 description 46
- 238000012806 monitoring device Methods 0.000 description 19
- 238000004891 communication Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 14
- 238000012545 processing Methods 0.000 description 9
- 230000003068 static effect Effects 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 7
- 238000004590 computer program Methods 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000009499 grossing Methods 0.000 description 4
- 230000001902 propagating effect Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 3
- 238000013500 data storage Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 241001025261 Neoraja caerulea Species 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000003592 biomimetic effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/07—Controlling traffic signals
- G08G1/08—Controlling traffic signals according to detected number or speed of vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/065—Traffic control systems for road vehicles by counting the vehicles in a section of the road or in a parking area, i.e. comparing incoming count with outgoing count
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Traffic Control Systems (AREA)
Abstract
公开了对道路上的交通振荡的缓解。在示例中,一种方法确定沿着道路的缓解路段行驶的第一可控车辆,并确定缓解路段中的控制车道。控制车道包括第一可控车辆并且能被第一可控车辆阻碍。该方法确定缓解路段中的第一开放车道,并将目标缓解速度应用于控制车道中的第一可控车辆。第一开放车道与缓解路段中的控制车道相邻,并且目标缓解速度是基于第一开放车道的交通状态的。目标缓解速度调整通过第一开放车道流动的车流以缓解位于缓解路段的下游的交通拥堵。
Description
技术领域
本公开涉及对道路上的交通振荡的缓解,并且在更具体的示例中涉及使用可控车辆来缓解道路上的交通振荡。
背景技术
交通振荡是车辆频繁加速和减速的走走停停的驾驶状况。由于交通振荡而引起的多辆汽车的加速和减速常常导致过多的燃料消耗并生成大量的车辆排放物。如今,一些现代系统依靠自主驾驶和可远程导航的车辆来操纵道路上的车流以缓解交通振荡。这些现有系统一般要求车辆共同阻挡道路的所有车道以防止其它车辆越过这些可控车辆前进,从而使交通振荡平稳。但是,在许多情况下,车辆无法阻挡道路的所有车道。因此,其它车辆可以执行一个或多个车道变道操纵以移到未被阻挡车辆阻挡的一个或多个车道,然后通过未被阻挡的车道超过这些车辆前进。因此,这种方法通常低效,甚至不适用于缓解这些情况下的交通波。此外,现有解决方案常常需要在道路上存在大量的远程可导航的车辆以进行操作。因此,对于这些现有解决方案而言,在包括数量不足的可导航车辆的多种交通情况下缓解交通振荡通常是不切实际或不可能的。
发明内容
本公开中描述的主题通过提供用于缓解交通拥堵并平稳道路上的交通振荡的新颖技术而克服了现有解决方案的缺陷和局限性。
根据本公开中描述的主题的一个创新方面,一种计算机实现的方法包括:确定沿着道路的缓解路段行驶的第一可控车辆;确定缓解路段中的控制车道,该控制车道包括第一可控车辆并且能被第一可控车辆阻碍(impedible);确定缓解路段中的第一开放车道,该第一开放车道与缓解路段中的控制车道相邻;以及将目标缓解速度应用于控制车道中的第一可控车辆,该目标缓解速度是基于第一开放车道的交通状态的,该目标缓解速度调整通过第一开放车道流动的车流以缓解位于缓解路段的下游的交通拥堵。
一般而言,本公开中描述的主题的另一个创新方面可以在计算机实现的方法中实施,该方法包括:确定沿着道路的缓解路段行驶的第一可控制车辆和第二可控制车辆;监视第一可控车辆与第二可控车辆之间的距离;确定第一可控车辆与第二可控车辆之间的距离在当前时间戳处满足接近距离阈值;响应于确定第一可控车辆与第二可控车辆之间的距离在当前时间戳处满足接近距离阈值,确定缓解路段中的控制车道和可阻碍的车道,控制车道包括第一可控车辆并且能被第一可控车辆阻碍,可阻碍的车道包括第二可控车辆并且能被第二可控车辆阻碍;确定缓解路段中的开放车道,该开放车道与缓解路段中的控制车道相邻;以及将目标缓解速度应用于控制车道中的第一可控车辆和可阻碍的车道中的第二可控车辆,该目标缓解速度是基于开放车道的交通状态的,该目标缓解速度调整通过开放车道流动的车流以缓解位于缓解路段的下游的交通拥堵。
一般而言,本公开中描述的主题的另一个创新方面可以在如下系统中实施,该系统包括:一个或多个处理器;一个或多个存储指令的存储器,所述指令在由一个或多个处理器执行时使系统:确定沿着道路的缓解路段行驶的第一可控车辆;确定缓解路段中的控制车道,该控制车道包括第一可控车辆并且能被第一可控车辆阻碍;确定缓解路段中的第一开放车道,该第一开放车道与缓解路段中的控制车道相邻;以及将目标缓解速度应用于控制车道中的第一可控车辆,该目标缓解速度是基于第一开放车道的交通状态的,该目标缓解速度调整通过第一开放车道流动的车流以缓解位于缓解路段的下游的交通拥堵。
这些和其它实施方式可以各自可选地包括以下特征中的一个或多个:目标缓解速度增大通过第一开放车道流动的车流超过以目标缓解速度在控制车道中行驶的第一可控车辆的超车流速;确定缓解路段中的第二开放车道,并且其中目标缓解速度使通过第一开放车道流动的车流和通过第二开放车道流动的车流超过以目标缓解速度在控制车道中行驶的第一可控车辆的总超车流速最大化;确定缓解路段中的第一开放车道包括:确定缓解路段中的第一可控车辆附近的一个或多个邻近可控车辆,并且确定缓解路段中的第一开放车道,该第一开放车道不包括所述一个或多个邻近可控车辆,并且不能被所述一个或多个邻近可控车辆阻碍;确定在缓解路段中位于第一可控车辆附近的邻近可控车辆,确定缓解路段中的可阻碍的车道,该可阻碍的车道包括邻近可控车辆并且能被邻近可控车辆阻碍,并将目标缓解速度应用于可阻碍的车道中的邻近可控车辆;确定缓解路段中的一个或多个开放车道和一个或多个可阻碍的车道,所述一个或多个开放车道包括第一开放车道,生成在无阻碍交通状况下的与道路相关联的第一交通图,缓解路段中的控制车道和一个或多个可阻碍的车道在无阻碍交通状况下不受阻碍,生成在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图,缓解路段中的控制车道和一个或多个可阻碍的车道在被阻碍交通状况下受到阻碍(impede),确定缓解路段的上游部分的目标交通状态,缓解路段的上游部分位于第一可控车辆的上游,并基于在无阻碍交通状况下的与道路相关联的第一交通图、在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图以及缓解路段的上游部分的目标交通状态来确定第一可控车辆的目标缓解速度;生成在无阻碍交通状况下的与道路相关联的第一交通图包括:监视道路的交通数据,基于道路的交通数据来计算与道路相关联的一个或多个交通度量,确定道路的一个或多个道路特性,基于初始交通图、与道路相关联的一个或多个交通度量以及道路的一个或多个道路特性来生成在无阻碍交通状况下的与道路相关联的第一交通图,并且其中第一交通图指示出在无阻碍交通状况下的道路上的流速与车辆密度之间的关系或者道路上的车速与车辆密度之间的关系;道路的交通数据包括在多个时间戳处的与道路的多个路段相关联的流速、车辆密度和车速中的一个或多个,与道路相关联的一个或多个交通度量包括道路通行能力、与道路通行能力对应的通行能力车辆密度和与道路相关联的拥挤车辆密度中的一个或多个,并且道路的一个或多个道路特性包括与道路相关联的限速和车辆数量中的一个或多个;生成在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图包括:监视道路的交通数据,基于道路的交通数据来计算与道路相关联的一个或多个交通度量,基于与道路相关联的交通量度和缓解路段中开放车道的数量来计算与一个或多个开放车道相关联的一个或多个交通量度,确定一个或多个开放车道的一个或多个道路特性,基于初始交通图、与一个或多个开放车道相关联的一个或多个交通度量以及一个或多个开放车道的一个或多个道路特性来生成在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图,并且其中第二交通图指示出在被阻碍交通状况下的一个或多个开放车道中的流速与车辆密度之间的关系或者一个或多个开放车道中的车速与车辆密度之间的关系;确定缓解路段的上游部分的目标交通状态包括:确定道路上的交通波和该交通波的一个或多个传播参数,确定当前时间戳处的缓解路段的车辆密度,基于当前时间戳处的缓解路段的车辆密度以及交通波的一个或多个传播参数来估计未来时间戳处的缓解路段的平均车辆密度,并基于未来时间戳处的缓解路段的平均车辆密度来确定缓解路段的上游部分的目标交通状态;确定道路上的交通波以及该交通波的一个或多个传播参数包括:接收在多个时间戳处的位于道路上的一个或多个车辆的车辆移动数据,基于在多个时间戳处的位于道路上的一个或多个车辆的车辆移动数据以及在无阻碍交通状况下的与道路相关联的第一交通图来确定在多个时间戳处的与道路相关联的多个车辆密度分布,并基于在多个时间戳处的与道路相关联的多个车辆密度分布来确定道路上的交通波以及该交通波的一个或多个传播参数;在多个时间戳处的位于道路上的一个或多个车辆的车辆移动数据包括:在多个时间戳当中的相应的时间戳处一个或多个车辆当中的车辆的车辆位置、车速和车辆车道中的一个或多个,并且交通波的一个或多个传播参数包括传播速度、传播距离、与交通波相关联的交通停止区域的覆盖区域以及与交通波相关联的交通移动区域的覆盖区域中的一个或多个;确定当前时间戳处的缓解路段的车辆密度包括接收车辆的车辆移动数据,该车辆移动数据包括当前时间戳处的缓解路段中车辆位置处的车辆的车速,并基于当前时间戳处的车辆的车速以及在无阻碍交通状况下的与道路相关联的第一交通图来确定当前时间戳处的缓解路段的车辆密度;确定缓解路段的上游部分的目标交通状态包括:基于未来时间戳处的缓解路段的平均车辆密度来确定在无阻碍交通状况下的与道路相关联的第一交通图上的目标交通状况,并且其中目标缓解速度使缓解路段的上游部分转变到目标交通状态,该目标交通状态具有在未来时间戳处的缓解路段的平均车辆密度;确定第一可控车辆的目标缓解速度包括:确定包括在无阻碍交通状况下的与道路相关联的第一交通图上的目标交通状态并且与在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图相切的切线,基于该切线来确定在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图上的一个或多个开放车道的起始交通状态,第一开放车道的交通状态是该一个或多个开放车道的起始交通状态,并基于状态转变线的斜率来确定第一可控车辆的目标缓解速度,该状态转变线包括在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图上的起始交通状态和在无阻碍交通状况下的与道路相关联的第一交通图上的目标交通状态。
这些和其它实施方式均可以可选地包括以下特征中的一个或多个:确定第一可控车辆,该第一可控车辆与交通拥堵之间的距离满足拥堵距离阈值;以及确定第二可控车辆,该第二可控车辆与第一可控车辆之间的距离满足初始车辆距离阈值。
这些和其它方面中的一个或多个的其它实施方式包括对应的系统、装置以及在非暂态计算机存储设备上编码的被配置为执行方法的动作的计算机程序。
在许多方面,本公开中用于缓解交通拥堵并平稳道路上的交通振荡的新颖技术是特别有利的。例如,即使一个或多个车辆可以在道路的一个或多个车道上执行换道操纵和/或超车行为,本文中描述的技术也能够有效地解决交通拥堵并缓解交通振荡。因此,本技术可以在各种交通环境中灵活地解决交通拥堵并平稳包括多个车道的道路上的交通振荡。作为另一个示例,本技术能够利用在道路的一个车道上行驶的单个可控车辆来解决交通拥堵并缓解交通振荡。因此,即使道路上的车流仅包括有限数量的可控车辆,本技术也可有利地适用。此外,本文描述的技术可以调整可控车辆和其它车辆的车辆移动以解决交通拥堵并缓解交通振荡。由于解决了交通拥堵并缓解了交通振荡,因此可以促进整个道路的车流,并且可以显著提高车辆的整体能效。
应当理解的是,前述优点是作为示例提供的,并且该技术可以具有许多其它优点和益处。
本公开通过示例而不是限制的方式在附图的图示中示出,其中相似的标号用于指相似的元件。
附图说明
图1是用于解决交通拥堵并缓解道路上的交通振荡的示例系统的框图。
图2是示例交通缓解应用的框图。
图3是用于解决交通拥堵并缓解交通振荡的示例方法的流程图。
图4是用于确定可控车辆的目标缓解速度的示例方法的流程图。
图5是用于生成与道路的缓解路段相关联的交通模型的示例方法的流程图。
图6是用于确定缓解路段的上游部分的目标交通状态的示例方法的流程图。
图7是用于确定道路上的交通波和交通波的传播参数的示例方法的流程图。
图8是用于解决交通拥堵并缓解交通振荡的另一个示例方法的流程图。
图9A图示了与道路的缓解路段相关联的示例交通模型。
图9B图示了与道路的缓解路段相关联的示例车辆超车模型。
图10A图示了道路上的示例性交通拥堵情况。
图10B图示了在道路上经过调整以解决交通拥堵并缓解交通振荡的车流的示例。
具体实施方式
本文描述的技术可以缓解道路上的交通拥堵和/或平稳交通振荡。如下面进一步详细描述的,除其它方面之外,该技术包括各个方面,诸如交通缓解方法、系统、计算设备、计算机程序产品和装置。
示例交通缓解系统可以确定道路上的交通拥堵,确定沿着道路的缓解路段行驶的第一可控车辆,并确定位于第一可控车辆附近的一个或多个邻近可控车辆。交通缓解系统可以确定在缓解路段中包括第一可控车辆并且能被第一可控车辆阻碍的控制车道,包括一个或多个邻近可控车辆并且能被一个或多个邻近可控车辆阻碍的一个或多个可阻碍的车道,以及一个或多个不受阻碍的开放车道。交通缓解系统可以确定第一可控车辆的目标缓解速度,并将目标缓解速度应用于控制车道中的第一可控车辆和/或一个或多个可阻碍的车道中的一个或多个邻近可控车辆。由于第一可控车辆可以以目标缓解速度在控制车道上行驶,并且一个或多个邻近可控车辆可以以目标缓解速度在一个或多个可阻碍的车道上行驶,因此,可以调整通过一个或多个开放车道超过第一可控车辆和/或一个或多个邻近车辆而到达拥堵区域的车流,从而缓解交通拥堵和/或平稳交通振荡。
图1是用于解决交通拥堵和/或缓解道路上的交通振荡的示例系统100的框图。如图所示,系统100包括经由网络105耦合以进行电子通信的服务器101和一个或多个交通监视设备109a…109n。系统 100还包括能够被控制以缓解交通拥堵的一个或多个可控车辆103a… 103n。可控车辆103a…103n可通信地耦合到系统100的其它实体。
可控车辆103包括具有(一个或多个)传感器113、(一个或多个)处理器115、(一个或多个)存储器117、(一个或多个)通信单元119、车辆数据存储库121和/或交通缓解应用120的一个或多个计算设备152。(一个或多个)计算设备152的示例可以包括耦合到 (一个或多个)可控车辆103的其它部件(诸如一个或多个传感器 113、一个或多个致动器、一个或多个激励器等)的虚拟或物理计算机处理器、控制单元、微控制器等。
可控车辆103是能够独立于车辆的人类驾驶员来控制车辆的一个或多个方面的车辆。例如,可控车辆可以独立于车辆的人类驾驶员来调整车辆的动态方面,诸如车辆的速度、加速度、转向、制动、悬架等。例如,可控车辆103的处理器115可以控制各种致动器和/或激励器(例如,包括燃料系统、发动机、制动系统、转向系统等)以调节车辆103的移动和速度。
可控车辆响应于由车载处理器生成和/或经由计算机网络(例如,经由无线网络)接收的指令。(一个或多个)可控车辆103可以经由信号线141耦合到网络105,并且可以经由网络发送和接收数据。例如,可控车辆103可以向其它(一个或多个)可控车辆103、(一个或多个)交通监视设备109、(一个或多个)响应车辆107和/或(一个或多个)服务器101发送数据和从其接收数据。(一个或多个)可控车辆103的非限制性示例包括汽车、公共汽车、卡车、船、飞机、仿生植入物、机器人、无人驾驶飞机或能够从陆地、水、空气、空间等上的一个点导航到另一个点的任何其它合适的移动平台。
系统100还包括一个或多个不可控车辆107a…107n,其缺乏被控制以缓解交通拥堵的能力,或者具有该能力但是由于各种原因(例如,系统错误、电力损耗、退出设置等)而在需要时被限制或不能使用。不可控车辆107a…107n可以包括可通信地耦合到系统100的其它实体的一个或多个响应车辆107(如由信号线143所反映的)和不可通信地耦合到系统100的其它实体的一个或多个非响应车辆107。在一些情况下,可控车辆103a...103n和不可控车辆107a...107n在本文中可以被称为(一个或多个)车辆。
在图1和其余的图中,标号(例如“103a”)后面的字母表示对具有那个特定标号的元件的引用。没有后续字母的文本的标号(例如“103”)表示对带有那个标号的元件的实例的一般参考。应当理解的是,图1中描绘的系统100是作为示例提供的,并且本公开所预期的系统100和/或进一步的系统可以包括附加的和/或更少的部件、可以将部件中的一个或多个组合成和/或划分成附加部件等。例如,系统100可以包括任何数量的可控车辆103、不可控车辆107、交通监视设备109、网络105或服务器101。
网络105可以是常规类型,有线和/或无线,并且可以具有许多不同的配置,包括星形配置、令牌环配置或其它配置。例如,网络 105可以包括一个或多个局域网(LAN)、广域网(WAN)(例如,互联网)、个人区域网(PAN)、公共网络、专用网络、虚拟网络、虚拟专用网络、对等网络、近场网络(例如, NFC等)、车载网络,和/或多个设备可以通过其进行通信的其它互连的数据路径。
NFC等)、车载网络,和/或多个设备可以通过其进行通信的其它互连的数据路径。
网络105还可以耦合到或包括电信网络的部分从而以各种不同的通信协议发送数据。示例协议包括但不限于传输控制协议/互联网协议(TCP/IP)、用户数据报协议(UDP)、传输控制协议(TCP)、超文本传输协议(HTTP)、安全超文本传输协议(HTTPS)、 HTTP上的动态自适应流传输(DASH)、实时流传输协议 (RTSP)、实时传输协议(RTP)和实时传输控制协议(RTCP)、互联网协议语音(VOIP)、文件传输协议(FTP)、WebSocket (WS)、无线接入协议(WAP)、各种消息传递协议(SMS、MMS、XMS、IMAP、SMTP、POP、WebDAV等)或其它合适的协议。在一些实施例中,网络105是使用连接的无线网络,诸如 DSRC(专用短距离通信)、WAVE、802.11p、3G、4G、5G+网络、 WiFiTM、卫星网络、车辆到车辆(V2V)网络、车辆到基础设施/基础设施到车辆(V2I/I2V)网络或任何其它无线网络。虽然图1图示了耦合到服务器101、(一个或多个)交通监视设备109、(一个或多个)可控车辆103和(一个或多个)响应车辆107的网络105的单个块,但是应当理解的是,网络105实际上可以包括任何数量的网络的组合,如上所述。
服务器101包括硬件和/或虚拟服务器,其包括处理器、存储器和网络通信能力(例如,通信单元)。如由信号线145所反映的,服务器101可以可通信地耦合到网络105。在一些实施例中,服务器可以向系统100的其它实体(例如,(一个或多个)可控车辆103、 (一个或多个)响应车辆107和/或(一个或多个)交通监视设备109) 发送数据和从其接收数据。如所描绘的,服务器101可以包括交通缓解应用120的实例120a,如本文其它地方进一步讨论的。
(一个或多个)交通监视设备109a…109n包括硬件和/或虚拟设备,其包括处理器、存储器和网络通信能力(例如,通信单元)。如由信号线147所反映的,(一个或多个)交通监视设备109可以可通信地耦合到网络105。在一些实施例中,(一个或多个)交通监视设备109可以是安装在道路的各个路段的较高位置和/或位于道路的路边以监视道路上的交通并生成描述道路上的交通的交通数据的(一个或多个)监视设备。在一些实施例中,道路的交通数据可以包括在多个时间戳处的与道路的各个路段相关联的流速、车辆密度、车速等。其它类型的交通数据也是可能的并且可以被预期。
在一些实施例中,每个交通监视设备109可以监视道路的对应路段,生成对应路段的交通数据,并且将与该对应路段相关联的交通数据作为道路的交通数据发送给系统100的其它实体(例如,(一个或多个)可控车辆103、服务器101等)。在一些实施例中,交通监视设备109可以包括被配置为捕获在其传感器范围内的对应路段的图像的一个或多个图像传感器(例如,监控相机);以及被配置为分析捕获的图像以生成与对应路段相关联的交通数据的一个或多个处理单元。作为示例,交通监视设备109可以对捕获的图像执行图像处理,以确定在预定时间段(例如,5秒)内通过了交通监视设备109的在相应路段上行驶的车辆的数量,并相应地计算与对应路段相关联的流速。应当理解的是,用于监视道路上的交通并生成道路的交通数据的其它实施方式也是可能的并且是被预期的。
(一个或多个)处理器115可以通过执行各种输入/输出、逻辑和/或数学运算来执行软件指令(例如,任务)。(一个或多个)处理器115可以具有各种计算体系架构来处理数据信号。(一个或多个) 处理器115可以是物理的和/或虚拟的,并且可以包括单个核心或多个处理单元和/或核心。在可控车辆103的上下文中,处理器可以是在可控车辆103(诸如小汽车)中实现的电子控制单元(ECU),但是其它类型的平台也是可能的并且是被预期的。ECU可以接收传感器数据并将其作为车辆操作数据存储在车辆数据存储库121中供由交通缓解应用120访问和/或取回。在一些实施方式中,(一个或多个) 处理器115可以能够生成并向(一个或多个)输入/输出设备提供电子显示信号、支持图像的显示、生成并传输车辆移动数据、执行包括各种类型的交通状况分析和最优速度计算等的复杂任务。在一些实施方式中,(一个或多个)处理器115可以经由总线154耦合到(一个或多个)存储器117以从中访问数据和指令并在其中存储数据。总线 154可以将(一个或多个)处理器115耦合到(一个或多个)可控车辆103的其它部件,包括例如(一个或多个)传感器113、(一个或多个)存储器117、(一个或多个)通信单元119和/或车辆数据存储库121。
交通缓解应用120包括可执行以解决交通拥堵并缓解交通振荡的软件和/或硬件逻辑。如图1所示,服务器101和可控车辆103a… 103n可以包括交通缓解应用120的实例120a和120b…120n。在一些实施例中,每个实例120a和120b…120n可以包括图2中所描绘的交通缓解应用120的一个或多个部件,并且可以被配置为取决于实例所处的位置来完全或部分地执行本文描述的功能。在一些实施例中,可以使用可由一个或多个计算机设备的一个或多个处理器执行的软件、使用硬件(诸如但不限于现场可编程门阵列(FPGA)、专用集成电路(ASIC)等)和/或硬件和软件的组合等来实现交通缓解应用120。交通缓解应用120可以接收和处理传感器数据、交通数据、车辆移动数据等,并且经由总线154与可控车辆103的其它元件(诸如存储器 117、通信单元119、车辆数据存储库121以及各种致动器和/或激励器等)通信。例如,交通缓解应用120可以将目标缓解速度传送给可控车辆103的一个或多个速度致动器以控制可控车辆103的车辆移动,从而缓解道路上的交通拥堵并平稳交通振荡。下面至少参考图2-图 10B来详细描述交通缓解应用120。
(一个或多个)存储器117包括非瞬态计算机可用(例如,可读、可写等)介质,其可以是可以包含、存储、传送、传播或者运输指令、数据、计算机程序、软件、代码、例程等以供由(一个或多个)处理器115处理或结合(一个或多个)处理器115处理的任何有形非瞬态装置或设备。例如,(一个或多个)存储器117可以存储交通缓解应用120。在一些实现中,(一个或多个)存储器117可以包括易失性存储器和非易失性存储器中的一个或多个。例如,(一个或多个)存储器117可以包括但不限于动态随机存取存储器(DRAM)设备、静态随机存取存储器(SRAM)设备、分立存储器设备(例如, PROM、FPROM、ROM)、硬盘驱动器、光盘驱动器(CD、DVD、 Blue-rayTM等)中的一个或多个。应当理解的是,(一个或多个)存储器117可以是单个设备,或者可以包括多种类型的设备和配置。
通信单元119使用无线和/或有线连接向其通信耦合(例如,经由网络105)的其它计算设备发送数据和从其它计算设备接收数据。通信单元119可以包括用于发送和接收数据的一个或多个有线接口和 /或无线收发器。通信单元119可以耦合到网络105并与系统100的其它实体(诸如其它(一个或多个)可控车辆103、(一个或多个) 响应车辆、(一个或多个)交通监视设备109和/或(一个或多个) 服务器101等)通信。通信单元119可以使用标准通信方法(诸如上面讨论的那些)与其它计算节点交换数据。
(一个或多个)传感器113包括适于(一个或多个)可控车辆 103的任何类型的传感器。(一个或多个)传感器113可以被配置为收集适于确定可控车辆103和/或其内部和外部环境的特点的任何类型的信号数据。(一个或多个)传感器113的非限制性示例包括各种光学传感器(CCD、CMOS、2D、3D、光检测和测距(LIDAR)、相机等)、音频传感器、运动检测传感器、气压计、高度计、热电偶、湿度传感器、红外(IR)传感器、雷达传感器、其它光电传感器、陀螺仪、加速度计、速度计、转向传感器、制动传感器、开关、车辆指示出器传感器、挡风玻璃刮水器传感器、地理位置传感器(例如, GPS(全球定位系统)传感器)、朝向传感器、无线收发器(例如,蜂窝、WiFiTM、近场等)、声纳传感器、超声传感器、触摸传感器、接近传感器、距离传感器等。在一些实施例中,一个或多个传感器 113可以包括在可控车辆103的前侧、后侧、右侧和/或左侧提供以捕获可控车辆103周围的情景上下文的面向外的传感器。
在一些实施例中,(一个或多个)传感器113可以包括被配置为记录包括视频图像和静止图像的图像、可以使用任何适用的帧速率记录视频流的帧、并且可以编码和/或处理使用任何适用方法捕获的视频和静止图像的一个或多个图像传感器(例如,光学传感器)。在一些实施例中,(一个或多个)图像传感器可以捕获其传感器范围内的周围环境的图像。例如,在车辆的背景下,图像传感器可以捕获可控车辆103周围的环境,包括道路、路边结构、建筑物、静态道路物体 (例如,车道、道路标记、交通标志、交通锥、路障等)和/或动态道路物体(例如,周围的可控车辆103和不可控车辆107、道路工人、建筑车辆等)等。在一些实施例中,图像传感器可以安装在车顶和/ 或可控车辆103内部以相对于可控车辆103的移动方向的任何方向 (向前、向后、向侧面、向上、面朝下等)进行感测。在一些实施例中,图像传感器可以是多向的(例如,LIDAR)。
车辆数据存储库121包括存储各种类型数据的非瞬态存储介质。例如,车辆数据存储库121可以使用诸如控制器区域网(CAN)总线之类的总线存储在给定可控车辆103的不同部件之间传送的车辆数据。在一些实施例中,车辆数据可以包括从耦合到可控车辆103的不同部件的多个传感器113收集的用于监视这些部件的操作状态的车辆操作数据,例如,传动、车速、加速度、减速度、车轮速度(每分钟转数-RPM)、转向角、制动力等。在一些实施例中,车辆数据可以包括由可控车辆103的一个或多个图像传感器捕获的多个道路场景图像以及与这些图像相关联的图像数据。在一些实施例中,可以处理这些捕获的图像以确定车道信息(例如,可控车辆103在其中行驶的车道等)和/或可控车辆103的其它信息。
在一些实施例中,车辆数据存储库121可以存储描述多个时间戳处的可控车辆103的车辆移动的车辆移动数据。对于每个时间戳,可控车辆103的车辆移动数据可以包括在相应的时间戳处的车速、指示出可控车辆103的地理位置的车辆位置(例如,GPS坐标)、指示出可控车辆103在其中行驶的车道的车辆车道等。其它类型的车辆移动数据也是可能的并且是被预期的。在一些实施例中,每个可控车辆 103可以周期性地将其车辆移动数据传输到位于其通信范围内的其它可控车辆103和响应车辆107和/或传输到服务器101(例如,每2秒)。可控车辆103还可以接收描述多个时间戳处的其它可控车辆 103和响应车辆107的车辆移动的车辆移动数据,并将这些车辆的车辆移动数据存储在车辆数据存储库121中。
在一些实施例中,车辆数据存储库121可以存储描述多个时间戳处的道路的各个路段上的交通的交通数据。对于在每个时间戳处的道路的每个路段,道路的交通数据可以包括指示出在相应的时间戳处在该路段的预定义距离上存在的车辆数量的车辆密度(例如,40辆/千米)、指示出在相应的时间戳处在预定义时间段内通过了静态观察点的在该路段上的车辆数量的流速(例如,4000辆/小时)、指示出在相应的时间戳处在该路段上行驶的车辆的平均速度的车速(例如, 100千米/小时),等等。其它类型的交通数据也是可能的并且是被预期的。
在一些实施例中,车辆数据存储库121还可以存储指示出道路上的车流的各种特性的交通量度。在一些实施例中,交通量度可以包括与道路相关联的道路通行能力(例如,5400辆/小时)、通行能力车辆密度(例如,60辆/千米)、拥挤车辆密度(例如,180辆/公里)等等。其它交通度量也是可能的并且是被预期的。
在一些实施例中,车辆数据存储库121可以存储一个或多个交通模型以及与一个或多个交通模型对应的一个或多个车辆超车模型。在一些实施例中,交通模型可以描述道路上的车流以及道路的一个或多个开放车道中的车流。在一些实施例中,道路上的车流可以包括一个或多个车流,并且每个车流可以通过道路的一个车道流动。类似地,车道的一个或多个开放车道中的车流可以包括一个或多个车流,并且每个车流可以通过道路的一个开放车道流动。在一些实施例中,与交通模型对应的车辆超车模型可以描述道路上的车流和相对于以车速移动的可控车辆103的道路的一个或多个开放车道中的车流,从而描述超过这个可控车辆103的超车流。
在一些实施例中,车辆数据存储库121可以存储初始交通状况图、道路的道路特性(例如,限速、车道数量等)、道路的一个或多个开放车道的道路特性(例如,开放车道的数量等)和/或其它类型的用于生成交通模型和/或车辆超车模型的数据。在一些实施例中,车辆数据存储库121还可以存储用于控制一个或多个可控车辆103的车辆移动以缓解交通拥堵并平稳交通振荡的目标缓解速度。
在一些实施例中,车辆数据存储器121可以是用于存储并提供对数据的访问的数据存储系统(例如,标准数据或数据库管理系统)的一部分。存储在车辆数据存储器121中的其它类型的数据也是可能的并且是被预期的。
其它变化和/或组合也是可能的和预期的。应当理解的是,图1 中示出的系统100代表示例系统,并且各种不同的系统环境和配置是被预期的,并且这些系统环境和配置在本公开的范围内。例如,各种动作和/或功能可以从服务器移动到客户端,反之亦然,数据可以整合到单个数据存储装置中或者进一步分割到附加数据存储装置中,并且一些实现可以包括附加的或更少的计算设备、服务和/或网络,并且可以实现客户端或服务器侧的各种功能。另外,系统的各种实体可以集成到单个计算设备或系统中,或者划分到附加的计算设备或系统中等。
图2是示例交通缓解应用120的框图。如所描绘的,交通缓解应用120可以包括交通缓解发起器202、模型生成器204、交通振荡分析器206和目标速度计算器208,但是应当理解的是,交通缓解应用 120可以包括附加部件,诸如但不限于配置引擎、训练引擎、加密/解密引擎等,和/或这些各种部件可以组合为单个引擎或划分为附加引擎。
交通缓解发起器202、模型生成器204、交通振荡分析器206和目标速度计算器208可以被实现为软件、硬件或软件和硬件的组合。在一些实施例中,交通缓解发起器202、模型生成器204、交通振荡分析器206和目标速度计算器208可以通过总线154和/或处理器115可通信地耦合到彼此和/或计算设备152的其它部件。在一些实施例中,部件120、202、204、206和/或208中的一个或多个是可由处理器115执行以提供其功能的指令集。在另外的实施例中,120、202、 204、206和/或208中的一个或多个可存储在存储器117中,并且可由处理器115访问和执行以提供其功能。在任何前述实施例中,这些部件120、202、204、206和/或208可以适于与处理器115和计算设备152的其它部件进行协作和通信。下面至少参考图3-图10B更详细地描述交通缓解应用120及其部件202、204、206和208。
如本文其它地方所讨论的,交通缓解应用120包括可执行以确定一个或多个可控车辆103的目标缓解速度以解决道路上的交通拥堵并平稳交通振荡的逻辑。作为示例,在图10A中图示了一般的交通拥堵情况1000。如图所示,图10A描绘了道路1010,其包括其中发生交通拥堵的拥堵区域1012和其中车辆仍可继续前进的交通移动区域 1014。交通移动区域1014可以位于道路1010的在移动方向1015上拥堵区域1012的上游。如所描绘的,道路1010包括4个车道(例如,车道1003、车道1005、车道1007、车道1009)。因此,道路1010 上的车流可以包括4个车流,每个车流可以通过道路1010的一个车道流动。道路1010还可以设有沿着道路1010定位的多个交通监视设备109。如本文其它地方所讨论的,交通监视设备109可以监视交通并生成描述在多个时间戳处的道路1010上的交通的交通数据。
如图10A中所示,车辆可以在移动方向1015上在道路1010的各车道中行驶。在一些实施例中,在道路1010上行驶的车辆可以包括一个或多个可控车辆103和一个或多个不可控车辆107。可控车辆 103可以具有其所有者的能力和/或许可以与其它响应实体(例如,其它可控车辆103、响应车辆107、交通监视设备109、服务器101等) 来回传送车辆移动数据、交通数据等,可以接收或计算目标缓解速度,并且可以将其车速调整为目标缓解速度以缓解交通拥堵并平稳交通振荡。
另一方面,不可控车辆107可能不能或无法接收或计算目标缓解速度并将其车速调整为目标缓解速度以缓解交通拥堵并平稳交通振荡。在本公开中,可控车辆103可以由带有前缀“C”(可控)的附图标记表示。例如,如图10A所示,在道路1010的车道1005上行驶的车辆是可控车辆C1052、C1050、C1054和不可控车辆107b-107g的随机混合。在这些不可控车辆107当中,不可控车辆107c、107d、 107g可以是响应车辆107(在被控制方面受限制或不被使用/不被需要),而不可控车辆107b、107e、107f可以是不响应车辆107。
当车辆沿着道路1010行驶时,车辆可以执行一种或多种超车行为。例如,在一个车道上行驶的车辆由于其较高的车速而可以超过在车道1010的其它车道上行驶的一个或多个车辆。车辆还可以执行超车操纵以超过在其当前车道上行驶的一个或多个车辆。作为示例,在图10A中描绘的交通环境中,与在其它车道中的其它车辆相比,可控车辆C1050可以在车道1005中以较低的车速行驶。因此,在车道 1007中行驶的不可控车辆107a可以超过在车道1005中行驶的可控车辆C1050。在这个示例中,车道1005中的可控车辆C1052可以执行超车操纵以超过在车道1005中在其前面行驶的其它车辆。例如,当车道1007中有足够的空间时,可控车辆C1052可以执行换道操纵以从车道1005移到车道1007,在可控车辆C1052在车道1007中行驶时超过在车道1005中行驶的不可控车辆107b和可控车辆C1050,然后执行另一个换道操纵以从车道1007移回车道1005。作为这个超车操纵的结果,可控车辆C1052可以从车道1005中的不可控车辆 107b后面的车辆位置行驶到车道1005中的可控车辆C1050前面的车辆位置。可替代地,在超过不可控车辆107b和可控车辆C1050之后,可控车辆C1052可以继续在车道1007上行驶或者执行另一个换道操纵以从车道1007移到道路1010的不同车道(例如,车道1009)。在本公开中,车辆的超车行为可以指由以上示例中描述的不可控车辆107b和可控车辆C1052执行的任何超车动作。其它类型的超车行为也是可能的并且是被预期的。
图3是用于解决交通拥堵并缓解交通振荡的示例方法300的流程图。在方框302中,交通缓解发起器202可以确定沿着道路的缓解路段行驶的第一可控车辆103。在一些实施例中,为了确定沿着缓解路段行驶的第一可控车辆103,交通缓解发起器202可以确定道路上的交通拥堵。例如,交通缓解发起器202可以分析道路的交通数据,确定道路上的拥堵区域,该拥堵区域中的流速满足拥堵流速阈值(例如,小于20辆/小时),从而确定在拥堵区域中存在交通拥堵。在图10A 描绘的示例中,交通缓解发起器202可以确定道路1010的拥堵区域1012确实是拥堵的。在一些实施例中,交通缓解发起器202还可以确定拥堵区域的地理位置(例如,GPS坐标)。拥堵区域的地理位置可以被称为交通拥堵的地理位置。在一些实施例中,交通缓解发起器202可以从其它实体(例如,服务器101、交通监视设备109等) 接收描述交通拥堵的信息。
在一些实施例中,交通缓解发起器202可以确定位于交通拥堵的上游的第一可控车辆103,第一可控车辆103可以使第一可控车辆 103与交通拥堵之间的距离满足拥堵距离阈值(例如,超过45米)。在一些实施例中,交通缓解发起器202可以确定位于交通拥堵的上游的多个可控车辆103,这些可控车辆与交通拥堵的距离满足拥堵距离阈值,并且在这多个可控车辆103中随机选择第一可控车辆103。在一些实施例中,交通缓解发起器202可以确定在这多个可控车辆103 中与交通拥堵距离最小的可控车辆103,并且将这个可控车辆103确定为第一可控车辆103。用于确定第一可控车辆103的其它实施方式也是可能的并且是被预期的。
在一些实施例中,交通缓解发起器202可以确定与第一可控车辆 103相关联的缓解路段。如以下详细讨论的,第一可控车辆103可以沿着缓解路段行驶并且调整通过缓解路段的一个或多个车道流动的车流以缓解交通拥堵并平稳交通振荡。在一些实施例中,交通缓解发起器202可以确定位于交通拥堵的上游的缓解路段,该缓解路段可以具有预定义的覆盖区域(例如,60米),其中第一可控车辆103位于相对于缓解路段的预定义位置处(例如,中心点、距缓解路段起点的 20米等)。
在一些实施例中,交通缓解发起器202可以基于道路上的交通波来确定缓解路段。如本文其它地方所讨论的,交通振荡分析器206可以确定道路上的一个或多个交通波以及交通波的一个或多个振荡周期。交通波的每个振荡周期可以包括其中车辆不能向前移动的交通停止区域和其中车辆仍可以向前移动的交通移动区域。在一些实施例中,交通缓解发起器202可以确定其中包括第一可控车辆103并且具有包括交通波的一个或多个振荡周期的缓解路段覆盖区域的缓解路段。用于确定与第一可控车辆103相关联的缓解路段的其它实施方式也是可能的并且是被预期的。
继续图10A中的示例,交通缓解发起器202可以确定第一可控车辆103是在道路1010的车道1005中行驶的可控车辆C1050。在这个示例中,交通缓解发起器202还可以将缓解路段确定为缓解路段 1020。如图10A中描绘的,缓解路段1020可以位于拥堵区域1012 中的交通拥堵的上游,并且第一可控车辆C1050可以沿着缓解路段 1020在车道1005中行驶。
在方框304中,交通缓解发起器202可以确定缓解路段中的控制车道,该控制车道可以包括第一可控车辆103并且可以能被第一可控车辆103阻碍。例如,与通过缓解路段的其它车道流动的车流相比,第一可控车辆103可以被控制为以低于其它车道中周围车辆的车速的车速在控制车道中行驶,并且因此阻碍在控制车道中第一可控车辆 103后方的车流。继续图10A中的示例,交通缓解发起器202可以将控制车道确定为包括第一可控车辆C1050的车道1005。
在方框306中,交通缓解发起器202可以可选地确定缓解路段中的一个或多个可阻碍的车道,该可阻碍的车道可以与控制车道不同。在一些实施例中,为了确定可阻碍的车道,交通缓解发起器202可以确定在缓解路段中位于第一可控车辆103附近的(一个或多个)邻近可控车辆103,并确定包括一个或多个邻近可控车辆103的可阻碍的车道。因此,类似于能被第一可控车辆103阻碍的控制车道,可阻碍的车道可以能被包括在可阻碍的车道中的邻近可控车辆103阻碍。
在一些实施例中,为了确定邻近可控车辆103,交通缓解发起器 202可以确定使在可控车辆103与在控制车道中的第一可控车辆103 之间的距离满足接近距离阈值(例如,小于5米)的可控车辆103,并确定这个可控车辆103为邻近可控车辆103。由于可阻碍的车道中的邻近可控车辆103位于控制车道中的第一可控车辆103附近,因此可以与第一可控车辆103一起控制邻近可控车辆103以共同缓解交通拥堵。这个实施方式是特别有利的,这是因为:由于车流被阻碍的车道数量更多,因此它可以减少缓解交通拥堵所需要的时间。但是,应当理解的是,即使仅控制车道中的第一可控车辆103被控制以阻碍/ 调节通过控制车道流动的车流,交通缓解应用120也能够缓解交通拥堵,而可阻碍的车道103中的邻近可控车辆103不受控制,因此通过这些可阻碍的车道流动的车流不被阻碍。
继续图10A中的示例,交通缓解发起器202可以确定在可控车辆C1030和第一可控车辆C1050之间沿着道路1010的移动方向 1015的距离以及在可控车辆C1090和第一可控车辆C1050之间沿着移动方向1015的距离满足接近距离阈值(例如,小于5米)。因此,交通缓解发起器202可以将可控车辆C1030和可控车辆C1090确定为位于第一可控车辆C1050附近的邻近可控车辆103。如图所示,邻近可控车辆C1030可以位于第一可控车辆C1050的下游,而邻近可控车辆C1090可以位于第一可控车辆C1050的上游。在这个示例中,交通缓解发起器202可以在缓解路段1020中将包括邻近可控车辆 C1030的车道1003确定为第一可阻碍的车道,并将包括邻近可控车辆C1090的车道1009确定为第二可阻碍的车道。
在方框308中,交通缓解发起器202可以确定缓解路段中的一个或多个开放车道,该开放车道可以不同于控制车道和可阻碍的车道。在一些实施例中,开放车道可以与控制车道直接相邻或间接相邻(例如,开放车道和控制车道可以具有或者可以不具有位于其间(一个或多个)其它车道)。在一些实施例中,交通缓解发起器202可以如上面所讨论的那样确定缓解路段中位于第一可控车辆103附近的(一个或多个)邻近可控车辆103,并且确定排除这些(一个或多个)邻近可控车辆103的开放车道。由于开放车道与控制车道不同并且不包括邻近可控车辆103,因此开放车道可以不被第一可控车辆103和邻近可控车辆103的阻碍,因此通过开放车道流动的车流不会在缓解路段中被阻碍。应当理解的是,缓解路段可以包括多个开放车道,并且这些开放车道可以彼此直接或间接相邻(例如,两个开放车道可以具有或可以不具有位于其间的控制车道和/或(一个或多个)可阻碍的车道)。
继续图10A中的示例,交通缓解发起器202可以确定车道1007 不包括第一可控车辆C1050或者位于第一可控车辆C1050附近的邻近可控车辆C1030和邻近可控车辆C1090中的任何一个。因此,交通缓解发起器202可以将车道1007确定为开放车道,其中不能阻碍通过车道1007流动的车流。因此,在这个示例中,交通缓解发起器 202可以确定缓解路段1020包括控制车道1005、可阻碍的车道1003、可阻碍的车道1009和开放车道1007。交通缓解发起器202还可以确定通过控制车道1005流动的车流可被第一可控车辆C1050阻碍,通过可阻碍的车道1003流动的车流可被邻近可控车辆C1030阻碍,通过可阻碍的车道1009流动的车流可被邻近可控车辆C1090阻碍,并且通过开放车道1007流动的车流不受阻碍。
在方框310中,交通缓解应用120可以将目标缓解速度应用于控制车道中的第一可控车辆103。在方框312中,如果缓解路段包括一个或多个可阻碍的车道,那么交通缓解应用120还可以将目标缓解速度应用于一个或多个可阻碍的车道中的一个或多个邻近可控车辆103。如以下详细讨论的,应用于第一可控车辆103和/或邻近可控车辆103 的目标缓解速度可以调整通过缓解路段中的一个或多个开放车道流动的车流,从而缓解位于缓解路段的下游的交通拥堵。在一些实施例中,模型生成器204、交通振荡分析器206和目标速度计算器208可以基于一个或多个开放车道的交通状态和其它因素来确定第一可控车辆 103的目标缓解速度。
图4是用于确定控制车道中的第一可控车辆103的目标缓解速度的示例方法400的流程图。应当理解的是,方法400适用于在各种交通环境中确定第一可控车辆103的目标缓解速度,其中缓解路段包括至少一个开放车道和任意数量的可阻碍的车道。在一些实施例中,与通过一个或多个开放车道流动的车流相比,应用于在控制车道中的第一可控车辆103的目标缓解速度可以低于在缓解路段的一个或多个开放车道上行驶的其它车辆的车速,因此第一可控车辆103可以阻碍通过控制车道流动的车流。类似地,当目标缓解速度被应用于可阻碍的车道中的邻近可控车辆103时,与通过一个或多个开放车道流动的车流相比,邻近可控车辆103也可以阻碍通过可阻碍的车道流动的车流。因此,在有可能移到一个或多个开放车道时,在控制车道中在第一可控车辆103之后以及在可阻碍的车道中在邻近可控车辆103之后行驶的车辆可能执行一个或多个换道操纵。当这些车辆移到一个或多个开放车道时,这些车辆可以超过在控制车道中行驶的第一可控车辆103 和/或在可阻碍的车道中行驶的邻近可控车辆103,并以更快的移动前进。
在一些实施例中,如果缓解路段包括单个开放车道,那么目标缓解速度可以增大或最大化超车流速,在第一可控车辆103和/或邻近可控车辆103以目标缓解速度在其对应的车道中行驶时,通过唯一开放车道流动的车流以该超车流速超过第一可控车辆103和/或邻近可控车辆103。如果缓解路段包括多个开放车道,那么目标缓解速度可以增大或最大化总超车流速,在第一可控车辆103和/或邻近可控车辆103以目标缓解速度在其对应的车道中行驶时,通过这多个开放车道流动的车流以该超车流速超过第一可控车辆103和/或邻近可控车辆103。这个实施方式可以有利地缓解交通拥堵。例如,为了增大或最大化总超车流速,第一可控车辆103和/或邻近可控车辆103可以以足够低的目标缓解速度行驶,从而充分地调节朝着交通拥堵前进的上游交通。此外,随着总超车流速的增大或最大化,以目标缓解速度行驶的第一可控车辆103和/或邻近可控车辆103可以限制朝着交通拥堵前进的上游交通,同时仍然允许可以由位于缓解路段的下游的路段容纳的这个上游交通的一部分通过一个或多个开放车道继续向前。
在方框402中,模型生成器204可以生成在无阻碍交通状况下的与道路相关联的第一交通图。在无阻碍交通状况下,控制车道中的第一可控车辆103和一个或多个可阻碍的车道中的邻近可控车辆103可以不以目标缓解速度被控制,因此通过控制车道流动的车流和通过可阻碍的车道流动的车流在缓解路段可以不被阻碍。因此,在无阻碍交通状况下,通过缓解路段中的道路的所有车道(例如,控制车道、 (一个或多个)可阻碍的车道和(一个或多个)开放车道)流动的车流可以不被阻碍。
在一些实施例中,在无阻碍交通状况下的与道路相关联的第一交通图可以描述在道路的所有车道均不受阻碍时的道路上的车流(因此,也是在道路的缓解路段上)。在一些实施例中,第一交通图可以指示出在无阻碍交通状况下的道路上的流速和车辆密度之间的关系和/或道路上的车速和车辆密度之间的关系。如本文其它地方所讨论的,道路上的车辆密度可以指示出在特定时间戳处在道路的预定距离上存在的车辆的数量(例如,40辆汽车/千米),并且道路上的流速可以指示出在相应的时间戳处在预定义时间段内通过了静态观察点的在道路上行驶的车辆的数量(例如,4000辆/小时)。
在方框404中,模型生成器204可以生成在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图。在被阻碍交通状况下,控制车道中的第一可控车辆103和一个或多个可阻碍的车道中的邻近可控车辆103可以以目标缓解速度被控制,因此第一可控车辆103可以阻碍通过控制车道流动的车流并且邻近可控车辆103可以阻碍通过缓解路段中一个或多个可阻碍的车道流动的车流。因此,通过缓解路段中的控制车道流动的车流和通过缓解路段中的一个或多个可阻碍的车道流动的车流可以被阻碍,而通过缓解路段中的一个或多个开放车道流动的车流可以在无阻碍交通状况下不被阻碍。
在一些实施例中,在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图可以描述在道路的缓解路段中控制车道和一个或多个可阻碍的车道被阻碍而一个或多个开放车道不被阻碍时的、在道路的一个或多个开放车道中的车流。在一些实施例中,第二交通图可以指示出在被阻碍交通状况下的在道路的一个或多个开放车道中的流速与车辆密度之间的关系和/或在道路的一个或多个开放车道中的车速与车辆密度之间的关系。类似于第一交通图,道路的一个或多个开放车道中的车辆密度可以指示出在特定时间戳处在一个或多个开放车道的预定义距离上存在的车辆数量(例如,15辆/千米),并且道路的一个或多个开放车道中的流速可以指示出在相应的时间戳处在预定义时间段内通过了静态观察点的在一个或多个开放车道中行驶的车辆数量(例如,2700辆/小时)。
图5是用于生成与道路的缓解路段相关联的交通模型的示例性方法500的流程图,该交通模型可以包括在无阻碍交通状况下的与道路相关联的第一交通图以及在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图。在方框502中,模型生成器204可以接收道路的交通数据。例如,模型生成器204可以从交通监视设备109接收道路的交通数据。如本文其它地方所讨论的,道路的交通数据可以描述在多个时间戳处的道路的各个路段上的交通。对于每个时间戳处的道路的每个路段,道路的交通数据可以包括在相应的时间戳处的与路段相关联的车辆密度(例如,40辆/千米)、流速(例如,4000辆/ 小时)、车速(例如,100千米/小时)等。
在方框504中,模型生成器204可以基于道路的交通数据来计算与道路相关联的一个或多个交通度量。与道路相关联的交通度量可以指示出道路上的车流的各种特性。在一些实施例中,模型生成器204 可以确定指示出道路的最大流速的道路通行能力(例如,5400辆/小时)、指示出当车辆在道路上以等于道路通行能力的流速行驶时道路的车辆密度的通行能力车辆密度(例如,60辆/千米)、指示出由于交通拥堵而使得车辆在道路上保持不动时道路的车辆密度的拥挤车辆密度(例如,180辆/千米)等。其它交通度量也是可能的并且是被预期的。
在方框506中,模型生成器204可以基于与道路相关联的交通度量和缓解路段中的开放车道的数量来计算与一个或多个开放车道相关联的一个或多个交通度量。与一个或多个开放车道相关联的交通量度可以指示出通过道路的一个或多个开放车道流动的车流的各种特性。在一些实施例中,与一个或多个开放车道相关联的交通度量可以与缓解路段中的开放车道的数量成正比。作为示例,在图10A描绘的交通环境中,道路1000可以包括4个车道,并且缓解路段1020可以在这4个车道中包括1个开放车道(例如,车道1007)。在这个示例中,模型生成器204可以将道路1000的道路通行能力确定为5400辆 /小时,并且将道路1000中的一个或多个开放车道的道路通行能力确定为1350辆/小时(例如,5400/4)。
在方框508中,模型生成器204可以确定道路的一个或多个道路特性。在一些实施例中,道路的道路特性可以指示出与该道路相关联的静态特性(例如,限速、车道数量等)。模型生成器204还可以确定道路的缓解路段中的一个或多个开放车道的道路特性。类似地,一个或多个开放车道的道路特性可以指示出与一个或多个开放车道相关联的静态特性(例如,限速、开放车道的数量等)。继续图10A中的示例,模型生成器204可以确定道路1010包括限速为120千米/小时的4个车道。在这个示例中,模型生成器204还可以确定道路1010的缓解路段1020中的一个或多个开放车道包括限速为120千米/ 小时的1个开放车道。应当理解的是,其它道路特性也是可能的并且是被预期的。
在方框510中,模型生成器204可以基于初始交通图、与道路相关联的交通度量以及道路的道路特性来生成在无阻碍交通状况下的与道路相关联的第一交通图。在一些实施例中,模型生成器204可以从车辆数据存储库121取回初始交通图。初始交通图可以是用于描述车流的基本图,其具有与车流相关联的流速、车辆密度、车速等之间的一个或多个关系。在一些实施例中,模型生成器204可以使用与道路相关联的交通度量(例如,道路通行能力、通行能力车辆密度、拥挤车辆密度等)和道路的道路特性(例如,限速、车道数量等)来调整初始交通图的一个或多个图参数、系数值等,从而生成在无阻碍交通状况下的与道路相关联的第一交通图。如本文其它地方所讨论的,在无阻碍交通状况下的与道路相关联的第一交通图可以描述道路的所有车道均不受阻碍时道路上的车流。在本公开中,在无阻碍交通状况下的与道路相关联的第一交通图可以简称为第一交通图。
在方框512中,模型生成器204可以基于初始交通图、与一个或多个开放车道相关联的交通度量以及一个或多个开放车道的道路特性来生成在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图。类似于生成第一交通图,模型生成器204可以使用与一个或多个开放车道相关联的交通度量以及一个或多个开放车道的道路特性来调整初始交通图的一个或多个图参数、系数值等,从而生成在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图。如本文中其它地方所讨论的,在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图可以描述在道路的缓解路段中控制车道和一个或多个可阻碍的车道被阻碍而一个或多个开放车道不被阻碍时的、通过道路的一个或多个开放车道流动的车流。在本公开中,在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图可以被简称为第二交通图。
在方框514中,模型生成器204可以生成与道路的缓解路段相关联的交通模型。交通模型可以包括在无阻碍交通状况下的与道路相关联的第一交通图和在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图。在一些实施例中,模型生成器204可以将第一交通图和第二交通图聚合在同一坐标系中以生成交通模型。
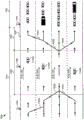
图9A图示了与道路的缓解路段相关联的示例交通模型902。如图所示,交通模型902可以包括在无阻碍交通状况下的与道路相关联的第一交通图912和在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图914。这样,第一交通图912可以描述在无阻碍交通状况下道路的所有车道都不被阻碍时通过道路的所有车道流动的车流。第二交通图914可以描述在无阻碍交通状况下控制车道被第一可控车辆103阻碍、一个或多个可阻碍的车道1003被邻近可控车辆 103阻碍并且一个或多个开放车道不受阻碍时的通过道路的一个或多个开放车道流动的车流。
如图9A中所描绘的,第一交通图912和第二交通图914可以通过与相应的车流相关联的流速q与车辆密度ρ之间的关系来描述它们的相应的车流。在一些实施例中,与车流相关联的流速q、车辆密度ρ和车速υ可以通过以下等式1彼此相关:
流速q=车辆密度ρ*车速υ[1]
在一些实施例中,一旦模型生成器204生成指示出车流的一对因子 (例如,流速q和车辆密度ρ)之间的关系的交通图,模型生成器 204就可以使用公式1根据先前生成的交通图得出指示出车流的其它因子对(例如,车速υ和车辆密度ρ、车速υ和流速q等)之间的关系的其它交通图。在本公开中,交通图可以指指示出车流的流速q 与车辆密度ρ之间的关系的交通图,指示出车流的车速υ与车辆密度ρ之间的关系的交通图,等等。其它类型的交通图也是可能的并且是被预期的。
返回去参考图4,在方框406中,交通振荡分析器206可以确定缓解路段的上游部分的目标交通状态,缓解路段的该上游部分可以位于缓解路段中第一可控车辆103的上游。图6是用于确定缓解路段的上游部分的目标交通状态的示例方法600的流程图。在一些实施例中,可以基于沿着道路传播的交通波来确定缓解路段的上游部分的目标交通状态。
在方框602中,交通振荡分析器206可以确定道路上的交通波以及该交通波的一个或多个传播参数。道路上的交通波通常是由交通拥堵引起的。交通波的非限制性示例包括但不限于冲击波、稀有分数波等。作为交通波的示例,当发生交通拥堵时,车辆需要在它们到达拥堵区域时停车。因此,交通拥堵会在其后面造成由于交通拥堵而使得车辆不能向前行驶的交通停止区域以及其中车辆仍可以向前行驶的交通移动区域。由于从后面到达拥堵区域的车辆数量一般大于从前面离开拥堵区域的车辆数量,因此,随着更多的上游车辆接近拥堵区域,交通停止区域常常向后扩展。因此,交通停止区域和交通移动区域之间的边界线通常不是固定的。替代地,交通停止区域和交通移动区域之间的边界线一般以交通波(例如,冲击波)的形式向后传播,该交通波在与车辆的移动方向相反的上游方向上沿着道路传播。
图7是用于确定道路上的交通波和交通波的传播参数的示例方法 700的流程图。在方框702中,交通振荡分析器206可以接收在多个时间戳处的位于道路上的一个或多个车辆的车辆移动数据。在一些实施例中,当可控车辆103和/或响应车辆107沿着道路行驶时,这些车辆可以以预定义的间隔(例如,每2s、5s、10s等)将其车辆移动数据周期性地发送到服务器101和/或位于其通信范围内的其它车辆。因此,交通振荡分析器206可以接收在多个时间戳处的位于道路的各个路段上的可控车辆103和/或响应车辆107的车辆移动数据。如本文其它地方所讨论的,在特定时间戳处的车辆的车辆移动数据可以包括在相应的时间戳处的车辆的车辆位置(例如,GPS坐标)、车速、车辆车道(例如,车道号)等。其它类型的车辆移动数据也是可能的并且是被预期的。
在方框704中,对于每个时间戳,交通振荡分析器206可以确定在相应的时间戳处的与道路相关联的车辆密度分布。车辆密度分布可以描述在相应的时间戳处的道路的各个路段处的车辆密度,并且可以基于位于相应的时间戳处的道路上的车辆的车辆移动数据和在无阻碍交通状况下的与道路相关联的第一交通图来确定。如本文其它地方所讨论的,在无阻碍交通状况下的与道路相关联的第一交通图可以通过与该车流相关联的车速υ和车辆密度ρ之间的关系来描述在无阻碍交通状况下在道路上的车流。
在一些实施例中,为了生成在时间戳t=t1处的与道路相关联的车辆密度分布,交通振荡分析器206可以分析位于道路上的各种车辆 (例如,可控车辆103和/或响应车辆107)的车辆移动数据,并确定在时间戳t=t1处的这些车辆的车辆位置、车速、车辆车道等。对于这些车辆中的每个车辆,交通振荡分析器206可以确定包括在时间戳t =t1处的车辆的车辆位置的道路的路段,并且可以基于时间戳t=t1处在路段上行驶的车辆的车速υ1以及与由第一交通图(第一交通图在无阻碍交通状况下的与道路相关联,其中所有车道均不被阻碍)指示出的道路上的车流相关联的车速υ与车辆密度ρ之间的关系来确定在时间戳t=t1处的路段的车辆密度ρ1。在一些实施例中,如果路段在时间戳t=t1处包括多个可控车辆103和/或响应车辆107,那么交通振荡分析器206可以计算这些车辆的平均车速,并以类似的方式使用这些车辆的平均车速来确定时间戳t=t1处的道路的车辆密度ρ1。
在一些实施例中,一旦确定了在时间戳t=t1处的道路的各个路段中的车辆密度ρ1,交通振荡分析器206就可以将各个路段的车辆密度ρ1聚合到在时间戳t=t1处的与道路相关联的车辆密度分布中。在一些实施例中,交通振荡分析器206可以应用附加处理以使在时间戳t=t1处的与道路相关联的车辆密度分布平滑,从而提高其精度。
在方框706中,交通振荡分析器206可以确定道路上的交通波以及该交通波的一个或多个传播参数。在一些实施例中,一旦确定了在各个时间戳t1…tn处的与道路相关联的车辆密度分布,交通振荡分析器206就可以分析在各个时间戳处的与道路相关联的车辆密度分布,并基于这些车辆密度分布来确定道路上的交通波。在一些实施例中,交通振荡分析器206还可以将运动波模型应用于在各个时间戳处的与道路相关联的车辆密度分布以确定交通波的传播参数。在一些实施例中,传播参数可以描述交通波沿着道路随时间的传播。交通波的传播参数的非限制性示例包括但不限于传播速度(例如,15千米/小时)、传播距离、与交通波相关联的交通停止区域的覆盖区域、与交通波相关联的交通移动区域的覆盖区域等。交通波的其它传播参数也是可能的并且是被预期的。
再次参考图6,在方框604中,交通振荡分析器206可以确定在当前时间戳t=tcurrent处的缓解路段的车辆密度。在一些实施例中,交通振荡分析器206可以确定在当前时间戳t=tcurrent处位于缓解路段中的车辆(例如,可控车辆103或响应车辆107)。例如,交通振荡分析器206可以从车辆的车辆移动数据来确定当前时间戳t=tcurrent处车辆的车辆位置、车速、车辆车道等,并确定当前时间戳t=tcurrent处车辆的车辆位置包括在缓解路段中。然后,交通振荡分析器206可以基于当前时间戳t=tcurrent处的车辆的车速以及与由第一交通图 (在无阻碍交通状况下的与道路相关联的第一交通图,其中所有车道均不被阻碍)指示出的道路上的车流相关联的车速υ与车辆密度ρ之间的关系来确定当前时间戳t=tcurrent处的缓解路段的车辆密度ρcurrent。在一些实施例中,如果缓解路段在时间戳t=tcurrent处包括多个可控车辆103和/或响应车辆107,那么交通振荡分析器206可以计算这些车辆的平均车速,并以类似方式使用这些车辆的平均车速来确定时间戳t=tcurrent处缓解路段的车辆密度ρcurrent。继续图10A中的示例,交通振荡分析器206可以将当前时间戳t=tcurrent处缓解路段1020的车辆密度ρcurrent确定为40辆/千米。
在方框606中,交通振荡分析器206可以估计在未来时间戳t= tfuture处的缓解路段的车辆密度。在一些实施例中,交通振荡分析器 206可以确定未来时间戳t=tfuture=tcurrent+Δt,其中Δt可以是当前时间戳t=tcurrent与未来时间戳t=tfuture之间的预定义时间距离(例如, 2s、5s、10s等)。在一些实施例中,交通振荡分析器206可以基于当前时间戳t=tcurrent处缓解路段的车辆密度ρcurrent以及交通波的传播参数来估计未来时间戳t=tfuture处缓解路段的平均车辆密度ρfuture。如本文其它地方所讨论的,交通波的传播参数可以描述交通波沿着道路随时间的传播。继续图10A中的示例,交通振荡分析器206可以将缓解路段1020在未来时间戳t=tfuture=(tcurrent+2s)处的平均车辆密度ρfuture估计为60辆/千米。
在方框608中,交通振荡分析器206可以基于在未来时间戳t= tfuture处缓解路段的平均车辆密度ρfuture来确定缓解路段的上游部分的目标交通状态。在一些实施例中,缓解路段的上游部分的目标交通状态可以是车辆密度等于未来时间戳t=tfuture处缓解路段的平均车辆密度ρfuture的稳态。这个实施方式是特别有利的,因为基于这个目标交通状态确定并应用于第一可控车辆103和/或邻近可控车辆103的目标缓解速度可以将缓解路段的上游部分直接转变到目标交通状态。由于目标交通状态的车辆密度可以等于未来时间戳t=tfuture处缓解路段的平均车辆密度ρfuture,因此这个实施方式可以防止交通波进一步在道路的上游传播,从而对于位于缓解路段的上游的车辆使交通振荡趋于平稳。
在一些实施例中,交通振荡分析器206可以在无阻碍交通状况下的与道路相关联的第一交通图上确定缓解路段的上游部分的目标交通状态。特别地,交通振荡分析器206可以基于未来时间戳t=tfuture处缓解路段的平均车辆密度ρfuture将缓解路段的上游部分的目标交通状态定位在第一交通图上。例如,如图9A所描绘的,交通振荡分析器206可以基于估计的未来时间戳t=tfuture处缓解路段的平均车辆密度 (例如,60辆/千米)将缓解路段的上游部分的目标交通状态A定位在无阻碍交通状况下的与道路相关联的第一交通图912上。
返回去参考图4,在方框408中,目标速度计算器208可以基于在无阻碍交通状况下的与道路相关联的第一交通图、在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图以及缓解路段的上游部分的目标交通状态来确定第一可控车辆103的目标缓解速度。如本文其它地方所讨论的,目标缓解速度可以被应用于缓解路段的控制车道中的第一可控车辆103和/或可阻碍的车道中的邻近可控车辆103。
在一些实施例中,为了确定目标缓解速度,目标速度计算器208 可以确定交通模型中的如下切线,该切线可以包括在无阻碍交通状况下的与道路相关联的第一交通图上的目标交通状态并且可以与在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图相切。例如,如图9A所描绘的,目标速度计算器208可以确定切线920,切线920可以包括第一交通图912上的目标交通状态A并且可以与第二交通图914相切。如本文其它地方所讨论的,第一交通图912可以描述在无阻碍交通状况下道路的所有车道均未不受阻碍时通过道路的所有车道流动的车流。第二交通图914可以描述在被阻碍交通状况下控制车道和一个或多个可阻碍的车道分别被第一可控车辆103和邻近可控车辆103阻碍而一个或多个开放车道不会被阻碍时通过道路的一个或多个开放车道流动的车流。目标交通状态A可以是缓解路段的上游部分的目标交通状态,并且可以具有等于未来时间戳t=tfuture处缓解路段的平均车辆密度的车辆密度。
在一些实施例中,目标速度计算器208可以基于切线确定第二交通图上的一个或多个开放车道的起始交通状态。一个或多个开放车道的起始交通状态可以指示出在缓解过程的起点处在被阻碍交通状况下的一个或多个开放车道的交通状态,并且可以用于确定应用于控制车道中的第一可控车辆103和可阻碍的车道中的邻近可控车辆103的目标缓解速度以执行缓解。
如图9A所描绘的,为了确定一个或多个开放车道的起始交通状态,目标速度计算器208可以确定切线920与在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图914相切的切点922,并将一个或多个开放车道的起始交通状态B确定为切点922。可替代地,目标速度计算器208可以确定与第二交通图914上的切点922相关联的邻近范围B1B2,该邻近范围B1B2可以具有预定义的尺寸(例如,如由距离924所指示出的)并且可以包括第二交通图914上的邻近切点922的多个交通状态。然后,目标速度计算器208可以从第二交通图914上的邻近范围B1B2中随机确定一个或多个开放车道的起始交通状态B。用于确定一个或多个开放车道的起始交通状态的其它实施方式也是可能的并且是被预期的。
在一些实施例中,目标速度计算器208可以确定交通模型中的状态转变线。如图9A所描绘的,目标速度计算器208可以确定状态转变线AB,其包括位于第二交通图914(在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图)上的一个或多个开放车道的起始交通状态B,以及位于第一交通图912(在无阻碍交通状况下的与道路相关联的第一交通图)上的缓解路段的上游部分的目标交通状态A。如图9A所描绘的,如果目标速度计算器208确定一个或多个开放车道的起始交通状态B是切线920与第二交通图914相切的切点922,那么状态转变线AB和切线920可以重合,并且状态转变线 AB可以在起始交通状态B处与第二交通图914相切。另一方面,如果目标速度计算器208确定来自邻近范围B1B2的一个或多个开放车道的交通状态B与切点922相关联,那么状态转变线AB可以与第二交通图914基本相切。
在一些实施例中,目标速度计算器208可以基于状态转变线AB 确定第一可控车辆103和/或邻近可控车辆103的目标缓解速度。特别地,目标速度计算器208可以将应用于第一可控车辆103和/或邻近可控车辆103的目标缓解速度 确定为状态转变线AB的斜率。如图9A中描绘的,状态转变线AB的斜率可以是角度α的正切,因此目标缓解速度
确定为状态转变线AB的斜率。如图9A中描绘的,状态转变线AB的斜率可以是角度α的正切,因此目标缓解速度 可以等于Tan(α)。在一些实施例中,目标缓解速度
可以等于Tan(α)。在一些实施例中,目标缓解速度 可以低于道路的限速,并且一般低于道路上周围车辆行驶的速度。
可以低于道路的限速,并且一般低于道路上周围车辆行驶的速度。
如以上所讨论的,状态转变线AB可以包括在被阻碍交通状况下的一个或多个开放车道的起始交通状态B,起始交通状态B可以指示出在缓解过程的起点处在控制车道以及一个或多个可阻碍的车道分别被第一可控车辆103和邻近可控车辆103阻碍时一个或多个开放车道的交通状态。状态转变线AB还可以包括在无阻碍交通状况下的缓解路段的上游部分的目标交通状态A。因此,当第一可控车辆103和邻近可控车辆103在其相应的车道中以等于状态转变线AB的斜率的目标缓解速度 行驶时,起始交通状态B可以被转变以实现目标交通状态A。因此,缓解路段的上游部分可以转变到目标交通状态A。如本文其它地方所讨论的,目标交通状态A可以具有等于在未来时间戳t=tfuture处缓解路段1020的平均车辆密度的车辆密度。因此,当缓解路段1020的上游部分转变到目标交通状态A时,可以防止交通波在道路的上游进一步传播。
行驶时,起始交通状态B可以被转变以实现目标交通状态A。因此,缓解路段的上游部分可以转变到目标交通状态A。如本文其它地方所讨论的,目标交通状态A可以具有等于在未来时间戳t=tfuture处缓解路段1020的平均车辆密度的车辆密度。因此,当缓解路段1020的上游部分转变到目标交通状态A时,可以防止交通波在道路的上游进一步传播。
此外,如果缓解路段包括单个(例如,仅一个)开放车道,那么当第一可控车辆103和邻近可控车辆103在其对应车道中以等于状态转变线AB的斜率的目标缓解速度 行驶时,在给定需要实现的目标交通状态A的情况下,可以使通过该唯一开放车道流动的车流超过在其对应车道中行驶的第一可控车辆103和/或邻近可控车辆103的超车流速最大化。如果缓解路段包括多个开放车道,那么当第一可控车辆103和邻近可控车辆103在其对应车道中以等于状态转变线AB 的斜率的目标缓解速度
行驶时,在给定需要实现的目标交通状态A的情况下,可以使通过该唯一开放车道流动的车流超过在其对应车道中行驶的第一可控车辆103和/或邻近可控车辆103的超车流速最大化。如果缓解路段包括多个开放车道,那么当第一可控车辆103和邻近可控车辆103在其对应车道中以等于状态转变线AB 的斜率的目标缓解速度 行驶时,在给定需要实现的目标交通状态A 的情况下,可以使通过这多个开放车道流动的车流超过在其对应车道中行驶的第一可控车辆103和/或邻近可控车辆103的总超车流速最大化。下面参考图9B详细描述这个有利效果。
行驶时,在给定需要实现的目标交通状态A 的情况下,可以使通过这多个开放车道流动的车流超过在其对应车道中行驶的第一可控车辆103和/或邻近可控车辆103的总超车流速最大化。下面参考图9B详细描述这个有利效果。
图9B图示了与道路的缓解路段相关联的示例车辆超车模型904,车辆超车模型904可以基于与道路的缓解路段相关联的交通模型902 来生成。如本文其它地方所讨论的,交通模型902可以包括描述各个车流的流速q与车辆密度ρ之间的关系的交通图,每个车流可以在特定交通状况下通过一个或多个特定车道流动。例如,交通模型902 中的第二交通图914可以描述在被阻碍交通状况下通过道路的一个或多个开放车道流动的车流的流速q与车辆密度ρ之间的关系。在一些实施例中,车辆通过模型904可以包括对应的超车图,其描述这些车流的超车流速q*与车辆密度ρ之间的关系。
在一些实施例中,通过(一个或多个)特定车道流动的车流的流速q可以指示出在预定义时间段内通过了静态观察点的在这些(一个或多个)特定车道中行驶的车辆的数量。另一方面,同一车流的超车流速q*可以指示出当动态观察点以观察者速度υ0行驶时通过了动态观察点的在这些(一个或多个)特定车道上行驶的车辆的数量。在一些实施例中,同一车流的流速q和超车流速q*可以通过以下等式 2彼此相关:
超车流速q*=流速q-观察者速度υ0*车辆密度ρ[2]
因此,在一些实施例中,模型生成器204可以使用等式2和动态观察点的观察者速度υ0从交通模型902的对应交通图中导出车辆超车模型904的超车图。动态观察点的示例可以是第一可控车辆103和/或邻近可控车辆103以车速υ=υ0在其对应车道中行驶。
根据等式2,如果第一可控车辆103和邻近可控车辆103以车速υ=0在其对应车道中行驶,那么观察者速度υ0=0并且超车流速q* =流速q。因此,如图9B描绘的,对于第一可控车辆103和邻近可控车辆103以车速υ=0在其对应车道中行驶的情况,模型生成器204 可以将交通模型902中的第一交通图912和第二交通图914视为车辆超车模型904中的对应超车图。在一些实施例中,如果第一可控车辆 103和邻近可控车辆103以目标缓解速度 在其对应车道中行驶,那么观察者速度υ0=目标缓解速度
在其对应车道中行驶,那么观察者速度υ0=目标缓解速度 如图9B中所描绘的,对于第一可控车辆103和邻近可控车辆103以目标缓解速度
如图9B中所描绘的,对于第一可控车辆103和邻近可控车辆103以目标缓解速度
 在其对应车道中行驶的情境,模型生成器204可以生成与第一交通图912对应的第一超车图932,并且生成与第二交通图914对应的第二超车图934。根据等式2,通过以下等式3,第一超车图932 可以与第一交通图912相关,并且第二超车图934可以与第二交通图 914相关:
在其对应车道中行驶的情境,模型生成器204可以生成与第一交通图912对应的第一超车图932,并且生成与第二交通图914对应的第二超车图934。根据等式2,通过以下等式3,第一超车图932 可以与第一交通图912相关,并且第二超车图934可以与第二交通图 914相关:
q*=q-Tan(α)*ρ [3]
根据等式3,可以如下确定与起始交通状态B对应的超车流速 和与目标交通状态A对应的超车流速
和与目标交通状态A对应的超车流速


如表达式4中所指示出的, 因此,对于第一可控车辆103 和邻近可控车辆103以目标缓解速度
因此,对于第一可控车辆103 和邻近可控车辆103以目标缓解速度 在其对应车道中行驶的情境,位于第二交通图914上的发起交通状态B可以与位于第二超车图934 上的发起交通状态B1对应。类似地,如表达式5中所指示出的,
在其对应车道中行驶的情境,位于第二交通图914上的发起交通状态B可以与位于第二超车图934 上的发起交通状态B1对应。类似地,如表达式5中所指示出的,
 因此对于第一可控车辆103和邻近可控车辆103以目标缓解速度
因此对于第一可控车辆103和邻近可控车辆103以目标缓解速度 在其对应车道上行驶的情境,位于第一交通图912上的目标交通状态A可以与位于第一超车图932上的目标交通状态A1对应。
在其对应车道上行驶的情境,位于第一交通图912上的目标交通状态A可以与位于第一超车图932上的目标交通状态A1对应。
如表达式4和表达式5所指示出的,由于状态转变线AB在起始交通状态B处与第二交通图914相切并且应用于第一可控车辆103 和邻近可控车辆103的目标缓解速度 等于状态转变线AB的斜率 (例如,Tan(α)),因此位于第二超车图934上的起始交通状态B1和位于第一超车图932上的目标交通状态A1可以具有相同的超车流速
等于状态转变线AB的斜率 (例如,Tan(α)),因此位于第二超车图934上的起始交通状态B1和位于第一超车图932上的目标交通状态A1可以具有相同的超车流速 和
和 如图9B所描绘的。因此,如图9B所描绘的,位于第二超车图934上的起始交通状态B1和位于第一超车图932上的目标交通状态A1可以属于与超车流速
如图9B所描绘的。因此,如图9B所描绘的,位于第二超车图934上的起始交通状态B1和位于第一超车图932上的目标交通状态A1可以属于与超车流速 对应的同一水平线。
对应的同一水平线。
在一些实施例中,如果缓解路段包括单个开放车道,那么起始交通状态B1可以指示出如下超车流速,通过唯一开放车道流动的车流以该超车流速超过以目标缓解速度 在其对应车道上行驶的第一可控车辆103和/或邻近可控车辆103。如果缓解路段包括多个开放车道,那么起始交通状态B1可以指示出如下总超车流速,通过这多个开放车道流动的车流以该总超车流速超过以目标缓解速度
在其对应车道上行驶的第一可控车辆103和/或邻近可控车辆103。如果缓解路段包括多个开放车道,那么起始交通状态B1可以指示出如下总超车流速,通过这多个开放车道流动的车流以该总超车流速超过以目标缓解速度 在其对应车道上行驶的第一可控车辆103和/或邻近可控车辆103。因此,如图9B 所描绘的,由于位于第二超车图934上的起始交通状态B1和位于第一超车图932上的目标交通状态A1属于与超车流速
在其对应车道上行驶的第一可控车辆103和/或邻近可控车辆103。因此,如图9B 所描绘的,由于位于第二超车图934上的起始交通状态B1和位于第一超车图932上的目标交通状态A1属于与超车流速 对应的同一水平线,因此给定与需要实现的目标交通状态A对应的目标交通状态A1,可以使由起始交通状态B1指示出的最大流速或总超车流速最大化。因而,当第一可控车辆103和/或邻近可控车辆103以目标缓解速度
对应的同一水平线,因此给定与需要实现的目标交通状态A对应的目标交通状态A1,可以使由起始交通状态B1指示出的最大流速或总超车流速最大化。因而,当第一可控车辆103和/或邻近可控车辆103以目标缓解速度 在其对应车道中行驶时,这些可控车辆103可以阻碍其对应车道中的车流以如需要实现的目标交通状态A允许的那样使通过一个或多个开放车道超过它们的车辆的数量最大化。
在其对应车道中行驶时,这些可控车辆103可以阻碍其对应车道中的车流以如需要实现的目标交通状态A允许的那样使通过一个或多个开放车道超过它们的车辆的数量最大化。
如图9B所描绘的,目标速度计算器208可以将起始交通状态B 确定为切线920的切点922,并且因此状态转变线AB可以与车辆超车模型904中处于初始交通状态B的第二交通图914相切。如以上讨论的,这个实施方式可以使得如由起始交通状态B1所指示出的通过一个或多个开放车道流动的车流的超车流速或总超车流速被最大化。如本文其它地方所讨论的,目标速度计算器208可以从与切点922相关联的邻近范围B1B2确定起始交通状态B,因此状态转变线AB可以与第二交通图914基本相切。虽然这个实施方式可能不会使通过一个或多个开放车道流动的车流的超车流速/总超车流速最大化,但是在给定目标交通状态A的情况下,它可以将超车流速/总超车流速增大到接近超车流速/总超车流速的最大值的值(例如,取决于邻近范围B1B2的预定义尺寸,这两个值之间的差可以满足阈值差)。
在一些实施例中,目标速度计算器208可以将与状态转变线AB 对应的状态转变线A1B1与第一超车图932之间的交点确定为结果交通状态C。因而,当第一可控车辆103和/或邻近可控车辆103以目标缓解速度 在其对应车道中行驶时,缓解路段的上游部分可以转变到与目标交通状态A对应的目标交通状态A1,而位于缓解路段的下游但位于交通拥堵的上游的路段(本文也简称为下游路段)可以转变到结果交通状态C。如第一超车图932上所指示出的,在下游路段中实现的结果交通状态C可以具有相同的超车流速/总超车流速
在其对应车道中行驶时,缓解路段的上游部分可以转变到与目标交通状态A对应的目标交通状态A1,而位于缓解路段的下游但位于交通拥堵的上游的路段(本文也简称为下游路段)可以转变到结果交通状态C。如第一超车图932上所指示出的,在下游路段中实现的结果交通状态C可以具有相同的超车流速/总超车流速 但与缓解路段的上游部分中实现的目标交通状态A1相比,具有较低的车辆密度ρ。因此,在下游路段中实现的结果交通状态C会带来前向冲击波,其中,与缓解路段的上游部分相比具有较低车辆密度ρ的交通区域会朝着交通拥堵沿着车道向前传播,因此可以缓解交通拥堵。
但与缓解路段的上游部分中实现的目标交通状态A1相比,具有较低的车辆密度ρ。因此,在下游路段中实现的结果交通状态C会带来前向冲击波,其中,与缓解路段的上游部分相比具有较低车辆密度ρ的交通区域会朝着交通拥堵沿着车道向前传播,因此可以缓解交通拥堵。
图10B图示了道路1010上的经调整以缓解图10A中描绘的交通拥堵情况1000的车流的示例1002。如本文其它地方所讨论的,在这个示例中,目标缓解速度 可以应用于缓解路段1020中在控制车道 1005中行驶的第一可控车辆C1050、在可阻碍的车道1003中行驶的邻近可控车辆C1030、在可阻碍的车道1009中行驶的邻近可控车辆 C1090。如本文其它地方所讨论的,目标缓解速度
可以应用于缓解路段1020中在控制车道 1005中行驶的第一可控车辆C1050、在可阻碍的车道1003中行驶的邻近可控车辆C1030、在可阻碍的车道1009中行驶的邻近可控车辆 C1090。如本文其它地方所讨论的,目标缓解速度 可以低于道路 1010的限速(例如,120千米/小时),并且一般低于可控车辆 C1050、C1030、C1090周围的其它车辆的车速。因此,当第一可控车辆C1050、邻近可控车辆C1030、邻近可控车辆C1090以目标缓解速度
可以低于道路 1010的限速(例如,120千米/小时),并且一般低于可控车辆 C1050、C1030、C1090周围的其它车辆的车速。因此,当第一可控车辆C1050、邻近可控车辆C1030、邻近可控车辆C1090以目标缓解速度 在其对应车道中行驶时,它们可以分别阻碍控制车道1005、可阻碍的车道1003、可阻碍的车道1009中的车流。
在其对应车道中行驶时,它们可以分别阻碍控制车道1005、可阻碍的车道1003、可阻碍的车道1009中的车流。
在这个示例中,因为在控制车道1005、可阻碍的车道1003、可阻碍的车道1009中的车流被阻碍,因此在控制车道1005、可阻碍的车道1003、可阻碍的车道1009中在第一可控车辆C1050、邻近可控车辆C1030、邻近可控车辆C1090后面行驶的其它车辆可以在有可能移到开放车道1007时很可能可以执行一个或多个换道操纵以更快地移动,如变道流1040所指示出的。如本文其它地方所讨论的,在给定在缓解路段1020的上游部分要实现的目标交通状态的情况下,应用于可控车辆C1050、C1030、C1090的目标缓解速度 可以使超车流速最大化(或将超车流速增大到接近超车流速的最大值的值),通过开放车道流动1007的车流以该超车流速超过可控车辆C1050、 C1030、C1090。因此,可控车辆C1050、C1030、C1090可以阻碍其对应车道中的车流以限制朝着拥堵区域1012前进的上游交通,同时仍允许可以被下游路段1022容纳的这个上游交通的一部分继续通过开放车道1007前进以实现缓解路段1020的上游部分中的目标交通状态。
可以使超车流速最大化(或将超车流速增大到接近超车流速的最大值的值),通过开放车道流动1007的车流以该超车流速超过可控车辆C1050、 C1030、C1090。因此,可控车辆C1050、C1030、C1090可以阻碍其对应车道中的车流以限制朝着拥堵区域1012前进的上游交通,同时仍允许可以被下游路段1022容纳的这个上游交通的一部分继续通过开放车道1007前进以实现缓解路段1020的上游部分中的目标交通状态。
如图10B所描绘的,一旦在开放车道1007上行驶的车辆超过可控车辆C1050、C1030和C1090,这些车辆就可以在可能从开放车道 1007移到下游路段1022中的其它车道时执行一个或多个换道操纵,如换道流1042所指示出的。由于控制车道1005、可阻碍的车道1003、可阻碍的车道1009中的车流受到阻碍,并且只有上游交通的有限部分可以通过开放车道1007到达下游路段1022,因此与缓解路段1020 的上游部分相比,下游路段1022可以具有较低的车辆密度ρ。因此,由于从后方接近拥堵区域1012的交通具有减小的车辆密度ρ,并且一些车辆可以在前方离开拥堵区域1012,因此可以缓解并最终完全解决拥堵区域1012中的交通拥堵。
此外,如上面所讨论的,以目标缓解速度 行驶的可控车辆 C1050、C1030、C1090可以允许上游交通的一部分通过开放车道 1007向前行驶以在缓解路段1020的上游部分中实现目标交通状态。如本文其它地方所讨论的,目标交通状态可以是车辆密度等于未来时间戳处缓解路段的平均车辆密度的稳态。由于在缓解路段1020的上游部分实现了车辆密度等于未来时间戳处缓解路段的平均车辆密度的目标交通状态,因此可以防止由交通拥堵造成的交通波进一步在道路 1010的上游传播。因此,由交通缓解应用120确定的目标缓解速度
行驶的可控车辆 C1050、C1030、C1090可以允许上游交通的一部分通过开放车道 1007向前行驶以在缓解路段1020的上游部分中实现目标交通状态。如本文其它地方所讨论的,目标交通状态可以是车辆密度等于未来时间戳处缓解路段的平均车辆密度的稳态。由于在缓解路段1020的上游部分实现了车辆密度等于未来时间戳处缓解路段的平均车辆密度的目标交通状态,因此可以防止由交通拥堵造成的交通波进一步在道路 1010的上游传播。因此,由交通缓解应用120确定的目标缓解速度 在被应用于可控车辆C1050、C1030、C1090时可以解决位于缓解路段1020的下游的交通拥堵,并且还可以防止位于缓解路段1020的上游的车辆受到由交通波传播造成的交通振荡的影响。
在被应用于可控车辆C1050、C1030、C1090时可以解决位于缓解路段1020的下游的交通拥堵,并且还可以防止位于缓解路段1020的上游的车辆受到由交通波传播造成的交通振荡的影响。
在一些实施例中,一旦目标速度计算器208确定了目标缓解速度 (例如,70千米/小时)以将目标缓解速度
(例如,70千米/小时)以将目标缓解速度 应用于控制车道中的第一可控车辆103和一个或多个可阻碍的车道中的邻近可控车辆103,交通缓解应用120就可以向第一可控车辆103和邻近可控车辆103提供包括目标缓解速度
应用于控制车道中的第一可控车辆103和一个或多个可阻碍的车道中的邻近可控车辆103,交通缓解应用120就可以向第一可控车辆103和邻近可控车辆103提供包括目标缓解速度 的交通缓解指令。在一些实施例中,交通缓解应用120可以生成并经由这些可控车辆103的一个或多个输出设备向驾驶员显示包括目标缓解速度
的交通缓解指令。在一些实施例中,交通缓解应用120可以生成并经由这些可控车辆103的一个或多个输出设备向驾驶员显示包括目标缓解速度 的引导消息。例如,交通缓解应用 120可以在第一可控车辆103的触摸屏上显示动态图形地图,该动态图形地图表示第一可控车辆103的车辆位置和道路上的交通拥堵以及引导消息(例如,“请将车速调整为70千米/小时,以帮助缓解交通拥堵并平稳交通振荡”)。可替代地,可以以语音指令的形式提供引导消息以供第一可控车辆103的驾驶员相应地跟随和调整第一可控车辆103的车速。
的引导消息。例如,交通缓解应用 120可以在第一可控车辆103的触摸屏上显示动态图形地图,该动态图形地图表示第一可控车辆103的车辆位置和道路上的交通拥堵以及引导消息(例如,“请将车速调整为70千米/小时,以帮助缓解交通拥堵并平稳交通振荡”)。可替代地,可以以语音指令的形式提供引导消息以供第一可控车辆103的驾驶员相应地跟随和调整第一可控车辆103的车速。
在一些实施例中,交通缓解应用120可以将目标缓解速度 (例如,70千米/小时)传送给第一可控车辆103和邻近可控车辆 103的控制单元(例如,ECU)。控制单元可以致动这些可控车辆 103的速度致动器以将这些可控车辆103的车速调整到目标缓解速度
(例如,70千米/小时)传送给第一可控车辆103和邻近可控车辆 103的控制单元(例如,ECU)。控制单元可以致动这些可控车辆 103的速度致动器以将这些可控车辆103的车速调整到目标缓解速度 因此,第一可控车辆103和邻近可控车辆103可以使它们的车速自动适应目标缓解速度
因此,第一可控车辆103和邻近可控车辆103可以使它们的车速自动适应目标缓解速度 从而缓解道路上的交通拥堵和交通振荡。
从而缓解道路上的交通拥堵和交通振荡。
如以上所讨论的,交通缓解应用120可以将目标缓解速度 应用于缓解路段中的第一可控车辆103和邻近可控车辆103。从缓解路段中的第一可控车辆103或邻近可控车辆103的角度来看,由于可控车辆103的同一集合在缓解路段中定位得彼此接近,因此缓解路段可以包括相同数量的控制车道、可阻碍的车道和开放车道。因此,为第一可控车辆103和为每个邻近可控车辆103生成的交通模型902(其包括在无阻碍交通状况下的与道路相关联的第一交通图912和在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图914)可以彼此完全相同,因此为第一可控车辆103和为邻近可控车辆103确定的目标缓解速度
应用于缓解路段中的第一可控车辆103和邻近可控车辆103。从缓解路段中的第一可控车辆103或邻近可控车辆103的角度来看,由于可控车辆103的同一集合在缓解路段中定位得彼此接近,因此缓解路段可以包括相同数量的控制车道、可阻碍的车道和开放车道。因此,为第一可控车辆103和为每个邻近可控车辆103生成的交通模型902(其包括在无阻碍交通状况下的与道路相关联的第一交通图912和在被阻碍交通状况下的与一个或多个开放车道相关联的第二交通图914)可以彼此完全相同,因此为第一可控车辆103和为邻近可控车辆103确定的目标缓解速度 可以具有相同的值。在一些实施例中,交通缓解应用120可以确定第一可控车辆103的目标缓解速度
可以具有相同的值。在一些实施例中,交通缓解应用120可以确定第一可控车辆103的目标缓解速度 然后将该目标缓解速度
然后将该目标缓解速度 应用于缓解路段中的第一可控车辆103和邻近可控车辆 103。
应用于缓解路段中的第一可控车辆103和邻近可控车辆 103。
在一些实施例中,为了加速缓解道路上的交通拥堵和/或交通振荡,交通缓解应用120可以延迟控制第一可控车辆103的车速,直到缓解路段中存在邻近第一可控车辆103定位的(一个或多个)邻近可控车辆103为止。下面参考图8详细讨论这个实施方式。但是,应当理解的是,交通缓解应用120能够通过上面讨论的实施例使用单个可控车辆103来缓解交通拥堵和/或交通振荡。
图8是用于解决交通拥堵和缓解交通振荡的示例方法800的流程图。在方框802中,交通缓解发起器202可以确定沿着道路的缓解路段行驶的第一可控车辆103和第二可控车辆103。在一些实施例中,交通缓解发起器202可以以类似于如上文参考图3所讨论的确定沿着缓解路段行驶的第一可控车辆103的方式来确定第一可控车辆103和缓解路段。缓解发起器202然后可以确定沿着缓解路段行驶的其它可控车辆103,并且确定第一可控车辆103与其它可控车辆103之间的距离不满足接近距离阈值(例如,小于5米)。因此,缓解发起器 202可以确定在缓解路段中不存在当前位于第一可控车辆103附近的邻近可控车辆103。
在一些实施例中,为了确定第二可控车辆103,缓解发起器202 可以确定沿着缓解路段行驶的候选可控车辆103,该候选可控车辆 103与第一可控车辆103之间的距离满足初始车辆距离阈值(例如,大于5米且小于20米),并从这些候选可控车辆103中随机选择第二可控车辆103。在一些实施例中,缓解发起器202可以在这些候选可控车辆103中选择在候选可控车辆103与第一可控车辆103之间具有最小距离的候选可控车辆103作为第二可控车辆103。在一些实施例中,如果缓解发起器202确定在缓解路段上行驶的第一可控车辆 103与其它可控车辆103之间的距离不满足初始车辆距离阈值,那么缓解发起器202可以确定这些可控车辆103彼此相距很远。在这种情况下,交通缓解应用120可以单独控制这些可控车辆103的车速以缓解道路上的交通拥堵和交通振荡。
在方框804中,交通缓解发起器202可以监视第一可控车辆 103与第二可控车辆103之间的距离。在方框806中,交通缓解发起器202可以确定在当前时间戳t=tcurrent处第一可控车辆103与第二可控车辆103之间的距离是否满足接近距离阈值(例如,小于5米)。如果在当前时间戳处第一可控车辆103与第二可控车辆103之间的距离不满足接近距离阈值,那么方法800前进到方框804以继续监视第一可控车辆103与第二可控车辆103之间的距离。如果第一可控车辆 103与第二可控车辆103之间的距离在当前时间戳处满足接近距离阈值,那么交通缓解发起器202可以确定第二可控车辆103为与第一可控车辆103相关联的邻近可控车辆103。然后,方法800可以前进到方框806以开始缓解过程。在一些实施例中,交通缓解发起器202可以确定多个第二可控车辆103,并且当第一可控车辆103和这些第二可控车辆103彼此接近时,交通缓解应用120可以开始缓解过程。
在一些实施例中,交通缓解应用120可以利用第一可控车辆103 和作为(一个或多个)邻近可控车辆103的(一个或多个)第二可控车辆103来执行缓解过程。可以以类似于以上参考图3-7讨论的缓解过程的方式来执行这个缓解过程。例如,在方框808中,交通缓解发起器202可以确定缓解路段中的控制车道和可阻碍的车道。控制车道可以包括第一可控车辆103并且可以是能被第一可控车辆103阻碍的。 (一个或多个)可阻碍的车道可以包括(一个或多个)第二可控车辆 103并且可以是能被(一个或多个)第二可控车辆103阻碍的。在方框810中,交通缓解发起器202可以确定缓解路段中的一个或多个开放车道。在示例中,一个或多个开放车道可以与控制车道相邻(例如,直接相邻或间接相邻)。在一些实施例中,一个或多个开放车道可以排除第一可控车辆103和(一个或多个)第二可控车辆103,因此通过一个或多个开放车道流动的车流可以不被阻碍。
在方框812中,交通缓解应用120可以将目标缓解速度应用于控制车道中的第一可控车辆103和(一个或多个)可阻碍的车道中的 (一个或多个)第二可控车辆103。如本文其它地方所讨论的,模型生成器204、交通振荡分析器206和目标速度计算器208可以基于一个或多个开放车道的交通状态(例如,起始交通状态B)和缓解路段的上游部分的目标交通状态(例如,目标交通状态A)确定第一可控车辆103的目标缓解速度。如果缓解路段包括单个开放车道,那么应用于控制车道中的第一可控车辆103和(一个或多个)可阻碍的车道中的(一个或多个)第二可控车辆103的目标缓解速度可以调整通过仅缓解路段的开放车道流动的车流以缓解交通拥堵并平稳交通振荡。如果缓解路段包括多个开放车道,那么应用于控制车道中的第一可控车辆103和(一个或多个)可阻碍的车道中的(一个或多个)第二可控车辆103的目标缓解速度可以调整通过缓解路段的多个开放车道流动的车流以缓解交通拥堵并平稳交通振荡。
因此,如上面所讨论的,交通缓解应用120可以延迟控制缓解路段中的可控车辆103的车速,直到存在多个彼此接近的可控车辆103 为止,以通过这些可控车辆通过103同时阻碍缓解路段中的多个车道。这个实施方式是特别有利的,因为它可以加速缓解道路上的交通拥堵和交通振荡。特别地,由于缓解路段中的多个车道同时被多个可控车辆103阻碍,因此缓解路段中的开放车道的数量会受到限制,因此通过这些开放车道流动的车流的流速会降低。如本文其它地方所讨论的,可以通过图9A中的第二交通图914来指示出通过开放车道流动的车流的流速。随着通过开放车道流动的车流的流速降低,状态转变线 AB的斜率可以增大,因此目标缓解速度 也可以增大。因此,向其应用目标缓解速度
也可以增大。因此,向其应用目标缓解速度 的第一可控车辆103和第二可控车辆103可以在缓解过程期间以较高的车速前进,从而减少缓解交通拥堵和交通振荡所需的时间量。
的第一可控车辆103和第二可控车辆103可以在缓解过程期间以较高的车速前进,从而减少缓解交通拥堵和交通振荡所需的时间量。
在以上描述中,出于解释的目的,阐述了许多具体细节以便提供对本公开的透彻理解。但是,应当理解的是,可以在没有这些具体细节的情况下实践本文描述的技术。另外,各种系统、设备和结构以框图形式示出,以避免模糊本描述。例如,各种实现被描述为具有特定的硬件、软件和用户接口。但是,本公开适用于可以接收数据和命令的任何类型的计算设备,以及提供服务的任何外围设备。
在一些情况下,本文可以依据对计算机存储器内的数据位操作的算法和符号表示来呈现各种实现。在这里并且一般而言,算法被认为是导致期望结果的自洽操作集。操作是需要对物理量进行物理操纵的操作。通常,虽然不是必须,但是这些量采取能够被存储、传送、组合、比较和以其它方式操纵的电信号或磁信号的形式。有时,主要出于通用的原因,已经证明将这些信号称为位、值、元素、符号、字符、项、数字等是方便的。
但是,应当记住的是,所有这些和类似术语都与适当的物理量相关联,并且仅仅是应用于这些量的方便标签。除非如从以下讨论中清楚地那样以其它方式具体说明,否则应当认识到的是,贯穿本公开,利用包括“处理”、“计算”、“运算”、“确定”、“显示”等术语的讨论是指计算机系统或类似电子计算设备的、将计算机系统的寄存器和存储器内的物理、电子数据操纵和变换成类似地表示为计算机系统存储器或寄存器或者其它此类信息存储、传输或显示设备内的物理量的其它数据的动作和处理。
本文描述的各种实现可以涉及用于执行本文的操作的装置。这个装置可以为所需目的专门构造,或者它可以包括由存储在计算机中的计算机程序选择性地激活或重新配置的通用计算机。这种计算机程序可以存储在计算机可读存储介质中,包括但不限于任何类型的盘,包括软盘、光盘、CD ROM和磁盘、只读存储器(ROM)、随机存取存储器(RAM)、EPROM、EEPROM、磁卡或光卡、包括具有非易失性存储器的USB密钥的闪存或者适于存储电子指令的任何类型的介质,每个介质都耦合到计算机系统总线。
本文描述的技术可以采用完全硬件实现、完全软件实现或包含硬件和软件元素两者的实现的形式。例如,该技术可以用软件实现,该软件包括但不限于固件、驻留软件、微代码等。此外,该技术可以采取可从计算机可用或计算机可读介质可访问的计算机程序产品的形式,计算机程序产品提供由计算机或任何指令执行系统使用或与其结合使用的程序代码。为了本说明书的目的,计算机可用或计算机可读介质可以是任何非瞬态存储装置,其可以包含、存储、传送、传播或运输由指令执行系统、装置或设备使用或与之结合使用的程序。
适于存储和/或执行程序代码的数据处理系统可以包括直接或通过系统总线间接耦合到存储器元件的至少一个处理器。存储器元件可以包括在程序代码的实际执行期间采用的本地存储器、大容量存储装置和高速缓冲存储器,高速缓冲存储器提供至少一些程序代码的临时存储,以便减少在执行期间必须从大容量存储装置取回代码的次数。输入/输出或I/O设备(包括但不限于键盘、显示器、点选设备等) 可以直接或通过中间I/O控制器耦合到系统。
网络适配器也可以耦合到系统,以使数据处理系统能够通过中间专用和/或公共网络耦合到其它数据处理系统、存储设备、远程打印机等。无线(例如,Wi-FiTM)收发器、以太网适配器和调制解调器仅是网络适配器的几个示例。专用和公共网络可以具有任何数量的配置和/或拓扑。可以使用各种不同的通信协议(包括例如各种因特网层、传输层或应用层协议)经由网络在这些设备之间发送数据。例如,可以使用传输控制协议/互联网协议(TCP/IP)、用户数据报协议 (UDP)、传输控制协议(TCP)、超文本传输协议(HTTP)、安全超文本传输协议(HTTPS)、HTTP上的动态自适应流传输(DASH)、实时流传输协议(RTSP)、实时传输协议(RTP)和实时传输控制协议(RTCP)、互联网协议语音(VOIP)、文件传输协议(FTP)、WebSocket(WS)、无线接入协议(WAP)、各种消息传递协议(SMS、MMS、XMS、IMAP、SMTP、POP、WebDAV等)或其它已知协议经由网络发送数据。
最后,本文呈现的结构、算法和/或接口并不固有地与任何特定计算机或其它装置相关。根据本文的教导,各种通用系统可以与程序一起使用,或者可以证明构造更专用的装置以执行所需的方法块是方便的。从上面的描述中可以看出各种这些系统所需的结构。此外,没有参考任何特定的编程语言描述本说明书。将认识到的是,可以使用各种编程语言来实现如本文描述的说明书的教导。
已经出于说明和描述的目的呈现了前面的描述。其并非旨在是详尽的或将说明书限制到所公开的精确形式。鉴于上述教导,许多修改和变化是可能的。意图是本公开的范围不受本具体实施方式的限制,而是受本申请的权利要求书的限制。如本领域技术人员将理解的,在不脱离本发明的精神或基本特点的情况下,本说明书可以以其它具体形式实施。同样,模块、例程、特征、属性、方法和其它方面的特定命名和划分不是强制性的或重要的,并且实现说明书或其特征的机制可以具有不同的名称、划分和/或格式。
此外,本公开的模块、例程、特征、属性、方法和其它方面可以被实现为软件、硬件、固件或前述的任意组合。而且,在说明书的部件(其示例是模块)的任何部件被实现为软件的任何地方,该部件可以被实现为独立程序、实现为更大程序的一部分、实现为多个单独的程序、实现为静态或动态链接库、实现为内核可加载模块、实现为设备驱动程序和/或以现在或将来已知的每种和任何其它方式实现。此外,本公开绝不以任何方式限于任何具体编程语言或者针对任何具体操作系统或环境的实现。
Claims (13)
1.一种用于缓解道路上的交通振荡的方法,包括:
确定沿着道路的缓解路段行驶的第一可控车辆,道路的缓解路段位于道路的拥堵路段的上游;
确定缓解路段中的控制车道,该控制车道包括第一可控车辆并且能被第一可控车辆阻碍;
确定缓解路段中的第一开放车道,该第一开放车道与缓解路段中的控制车道相邻;以及
将目标缓解速度应用于控制车道中的第一可控车辆,该目标缓解速度是基于第一开放车道的交通状态的,该目标缓解速度调整通过第一开放车道流动的车流以缓解位于缓解路段的下游的交通拥堵,该目标缓解速度低于第一可控车辆周围的其他车辆的车速,
其中确定缓解路段中的第一开放车道包括:
确定缓解路段中的第一可控车辆附近的一个或多个邻近可控车辆,其中所述一个或多个邻近可控车辆与所述第一可控车辆之间的距离小于接近距离阈值;以及
确定缓解路段中的第一开放车道,该第一开放车道不包括所述一个或多个邻近可控车辆,并且不能被所述一个或多个邻近可控车辆阻碍。
2.如权利要求1所述的方法,其中目标缓解速度增大如下的超车流速,通过第一开放车道流动的车流以该超车流速超过以目标缓解速度在控制车道中行驶的第一可控车辆。
3.如权利要求1所述的方法,还包括:
确定缓解路段中的第二开放车道;并且其中
目标缓解速度使如下的总超车流速最大化,通过第一开放车道流动的车流和通过第二开放车道流动的车流以该总超车流速超过以目标缓解速度在控制车道中行驶的第一可控车辆。
4.如权利要求1所述的方法,还包括:
确定在缓解路段中位于第一可控车辆附近的邻近可控车辆,其中所述邻近可控车辆与所述第一可控车辆之间的距离小于接近距离阈值;
确定缓解路段中的可阻碍的车道,该可阻碍的车道包括邻近可控车辆并且能被邻近可控车辆阻碍;以及
将目标缓解速度应用于可阻碍的车道中的邻近可控车辆,该目标缓解速度低于第一可控车辆以及邻近可控车辆周围的其他车辆的车速。
5.如权利要求1所述的方法,还包括:
确定缓解路段中的一个或多个开放车道和一个或多个可阻碍的车道,所述一个或多个开放车道包括第一开放车道;
生成在无阻碍交通状况下的与道路相关联的第一交通曲线,缓解路段中的控制车道和所述一个或多个可阻碍的车道在无阻碍交通状况下不受阻碍,其中第一交通曲线指示出在无阻碍交通状况下的道路上的流速与车辆密度之间的关系或者道路上的车速与车辆密度之间的关系;
生成在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线,缓解路段中的控制车道和所述一个或多个可阻碍的车道在被阻碍交通状况下受到阻碍,其中第二交通曲线指示出在被阻碍交通状况下的所述一个或多个开放车道中的流速与车辆密度之间的关系或者所述一个或多个开放车道中的车速与车辆密度之间的关系;
确定缓解路段的上游部分的目标交通状态,缓解路段的上游部分位于第一可控车辆的上游,其中目标交通状态表示上游部分的车辆密度等于在未来时间戳处的缓解路段的平均车辆密度的稳态;以及
基于在无阻碍交通状况下的与道路相关联的第一交通曲线、在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线以及缓解路段的上游部分的目标交通状态,确定第一可控车辆的目标缓解速度,以在上游部分中实现目标交通状态。
6.如权利要求5所述的方法,其中生成在无阻碍交通状况下的与道路相关联的第一交通曲线包括:
监视道路的交通数据;
基于道路的交通数据来计算与道路相关联的一个或多个交通度量;
确定道路的一个或多个道路特性;
基于初始交通曲线、与道路相关联的所述一个或多个交通度量以及道路的所述一个或多个道路特性来生成在无阻碍交通状况下的与道路相关联的第一交通曲线;并且其中
道路的交通数据包括在多个时间戳处的与道路的多个路段相关联的流速、车辆密度和车速中的一个或多个;
与道路相关联的所述一个或多个交通度量包括道路通行能力、与道路通行能力对应的通行能力车辆密度和与道路相关联的拥挤车辆密度中的一个或多个;以及
道路的所述一个或多个道路特性包括与道路相关联的限速和车道数量中的一个或多个。
7.如权利要求5所述的方法,其中生成在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线包括:
监视道路的交通数据;
基于道路的交通数据来计算与道路相关联的一个或多个交通度量;
基于与道路相关联的交通量度和缓解路段中开放车道的数量来计算与所述一个或多个开放车道相关联的一个或多个交通量度;
确定所述一个或多个开放车道的一个或多个道路特性;
基于初始交通曲线、与所述一个或多个开放车道相关联的所述一个或多个交通度量以及所述一个或多个开放车道的所述一个或多个道路特性来生成在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线;并且其中
道路的交通数据包括在多个时间戳处的与道路的多个路段相关联的流速、车辆密度和车速中的一个或多个;
与道路相关联的所述一个或多个交通度量包括道路通行能力、与道路通行能力对应的通行能力车辆密度和与道路相关联的拥挤车辆密度中的一个或多个;以及
所述一个或多个道路特性包括与开放车道相关联的限速和车道数量中的一个或多个。
8.如权利要求5所述的方法,其中确定缓解路段的上游部分的目标交通状态包括:
确定道路上的交通波和该交通波的一个或多个传播参数;
确定在当前时间戳处的缓解路段的车辆密度;
基于在当前时间戳处的缓解路段的车辆密度以及交通波的所述一个或多个传播参数来估计在未来时间戳处的缓解路段的平均车辆密度;以及
基于在未来时间戳处的缓解路段的平均车辆密度来确定缓解路段的上游部分的目标交通状态,
并且其中,交通波的所述一个或多个传播参数包括传播速度、传播距离、与该交通波相关联的交通停止区域的覆盖区域以及与该交通波相关联的交通移动区域的覆盖区域中的一个或多个。
9.如权利要求8所述的方法,其中确定道路上的交通波以及该交通波的所述一个或多个传播参数包括:
接收在多个时间戳处的位于道路上的一个或多个车辆的车辆移动数据;
基于在所述多个时间戳处的位于道路上的所述一个或多个车辆的车辆移动数据以及在无阻碍交通状况下的与道路相关联的第一交通曲线来确定在所述多个时间戳处的与道路相关联的多个车辆密度分布;以及
基于在所述多个时间戳处的与道路相关联的所述多个车辆密度分布来确定道路上的交通波以及该交通波的所述一个或多个传播参数,
并且其中,在所述多个时间戳处的位于道路上的所述一个或多个车辆的车辆移动数据包括在所述多个时间戳当中的相应的时间戳处的所述一个或多个车辆当中的车辆的车辆位置、车速和车辆车道中的一个或多个。
10.如权利要求8所述的方法,其中确定在当前时间戳处的缓解路段的车辆密度包括:
接收车辆的车辆移动数据,该车辆移动数据包括在当前时间戳处的缓解路段中的车辆位置处的车辆的车速;以及
基于在当前时间戳处的车辆的车速以及在无阻碍交通状况下的与道路相关联的第一交通曲线来确定在当前时间戳处的缓解路段的车辆密度。
11.如权利要求5所述的方法,其中确定缓解路段的上游部分的目标交通状态包括:
基于在未来时间戳处的缓解路段的平均车辆密度来确定在无阻碍交通状况下的与道路相关联的第一交通曲线上的目标交通状况,并且其中
目标缓解速度使缓解路段的上游部分转变到目标交通状态,该目标交通状态具有在未来时间戳处的缓解路段的平均车辆密度。
12.如权利要求5所述的方法,其中确定第一可控车辆的目标缓解速度包括:
确定包括在无阻碍交通状况下的与道路相关联的第一交通曲线上的目标交通状态并且与在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线相切的切线;
基于该切线来确定在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线上的所述一个或多个开放车道的起始交通状态,所述一个或多个开放车道的起始交通状态是在缓解过程的起点处在被阻碍交通状况下的所述一个或多个开放车道的交通状态;以及
基于如下的状态转变线的斜率来确定第一可控车辆的目标缓解速度,该状态转变线包括在被阻碍交通状况下的与所述一个或多个开放车道相关联的第二交通曲线上的起始交通状态和在无阻碍交通状况下的与道路相关联的第一交通曲线上的目标交通状态。
13.一种用于缓解道路上的交通振荡的系统,包括:
一个或多个处理器;以及
存储指令的一个或多个存储器,所述指令在由所述一个或多个处理器执行时使系统:
确定沿着道路的缓解路段行驶的第一可控车辆,道路的缓解路段位于道路的拥堵路段的上游;
确定缓解路段中的控制车道,该控制车道包括第一可控车辆并且能被第一可控车辆阻碍;
确定缓解路段中的第一开放车道,该第一开放车道与缓解路段中的控制车道相邻;以及
将目标缓解速度应用于控制车道中的第一可控车辆,该目标缓解速度是基于第一开放车道的交通状态的,该目标缓解速度调整通过第一开放车道流动的车流以缓解位于缓解路段的下游的交通拥堵,该目标缓解速度低于第一可控车辆周围的其他车辆的车速,
其中确定缓解路段中的第一开放车道包括:
确定缓解路段中的第一可控车辆附近的一个或多个邻近可控车辆,其中所述一个或多个邻近可控车辆与所述第一可控车辆之间的距离小于接近距离阈值;以及
确定缓解路段中的第一开放车道,该第一开放车道不包括所述一个或多个邻近可控车辆,并且不能被所述一个或多个邻近可控车辆阻碍。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/202,095 US11232705B2 (en) | 2018-11-28 | 2018-11-28 | Mitigation of traffic oscillation on roadway |
| US16/202,095 | 2018-11-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111243268A CN111243268A (zh) | 2020-06-05 |
| CN111243268B true CN111243268B (zh) | 2023-04-04 |
Family
ID=70771152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911190053.3A Active CN111243268B (zh) | 2018-11-28 | 2019-11-28 | 用于缓解道路上的交通振荡的方法和系统 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US11232705B2 (zh) |
| JP (1) | JP7247868B2 (zh) |
| CN (1) | CN111243268B (zh) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11100793B2 (en) * | 2019-01-15 | 2021-08-24 | Waycare Technologies Ltd. | System and method for detection and quantification of irregular traffic congestion |
| US11690128B2 (en) * | 2019-03-11 | 2023-06-27 | Fujitsu Limited | Digital representations of physical intelligent moving objects |
| WO2020263214A1 (en) * | 2019-06-24 | 2020-12-30 | Google Llc | Phantom traffic jam detection and avoidance |
| US11257361B2 (en) * | 2019-08-15 | 2022-02-22 | National Yunlin University Of Science And Technology | Vehicle driving shockwave prediction system for active safe driving and method thereof |
| US20210104158A1 (en) * | 2019-10-03 | 2021-04-08 | Quandopasso S.R.L.S. | Method and system for providing users with prompt information, instructions and advanced virtual road signposting about supervised road conditions |
| CN112818727A (zh) * | 2019-11-18 | 2021-05-18 | 华为技术有限公司 | 一种道路约束确定方法及装置 |
| US11526711B1 (en) * | 2020-05-20 | 2022-12-13 | State Farm Mutual Automobile Insurance Company | Synchronizing image data with either vehicle telematics data or infrastructure data pertaining to a road segment |
| JP7251531B2 (ja) | 2020-08-03 | 2023-04-04 | トヨタ自動車株式会社 | 車両の運転支援制御装置 |
| CN112312082B (zh) * | 2020-09-14 | 2021-11-30 | 上海商汤智能科技有限公司 | 道路运行情况确定方法及装置、设备和存储介质 |
| CN114964284A (zh) * | 2022-04-22 | 2022-08-30 | 合众新能源汽车有限公司 | 一种车辆路径的规划方法及装置 |
| CN115953908B (zh) * | 2022-12-02 | 2024-03-29 | 山东国泰建设工程有限公司 | 交通灯控制方法、系统及交通灯 |
| CN115662145B (zh) * | 2022-12-26 | 2023-03-10 | 广东汇通信息科技股份有限公司 | 一种基于大数据的事故路段车辆应急分流方法 |
| CN116129651B (zh) * | 2023-03-13 | 2023-11-24 | 东南大学 | 一种基于居民出行行为选择的交通容量计算方法 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6498981B1 (en) * | 1999-12-30 | 2002-12-24 | Honeywell International Inc. | System for sequencing traffic |
| WO2002017266A2 (en) * | 2001-01-08 | 2002-02-28 | Koninklijke Philips Electronics N.V. | Dynamic road marking system |
| US7813870B2 (en) * | 2006-03-03 | 2010-10-12 | Inrix, Inc. | Dynamic time series prediction of future traffic conditions |
| US7898433B2 (en) * | 2007-03-29 | 2011-03-01 | Roberts Howard H | Traffic control system |
| CN101751789B (zh) * | 2008-12-19 | 2011-09-07 | 李纲 | 道路行车导引装置及方法 |
| EP2387699B1 (en) * | 2009-01-16 | 2015-03-04 | Tomtom Global Content B.V. | Method for computing an energy efficient route |
| US20120123660A1 (en) | 2009-07-28 | 2012-05-17 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device, vehicle control method, and vehicle control system |
| US9014955B2 (en) * | 2011-07-20 | 2015-04-21 | Sumitomo Electric Industries, Ltd. | Traffic evaluation device non-transitory recording medium and traffic evaluation method |
| JP5654141B2 (ja) * | 2011-11-17 | 2015-01-14 | 日産自動車株式会社 | 航続可能距離予測装置、航続可能距離予測システム及び航続可能距離予測方法 |
| CN103000027B (zh) * | 2012-12-19 | 2014-12-10 | 安徽科力信息产业有限责任公司 | 基于浮动车在拥堵状态下的智能交通诱导方法 |
| US9643615B2 (en) * | 2014-06-04 | 2017-05-09 | International Business Machines Corporation | Automotive dynamic virtual network |
| US20170001562A1 (en) * | 2015-07-01 | 2017-01-05 | International Business Machines Corporation | Traffic safety alert system |
| US9764736B2 (en) * | 2015-08-14 | 2017-09-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle operation relative to unexpected dynamic objects |
| US20210166323A1 (en) * | 2015-08-28 | 2021-06-03 | State Farm Mutual Automobile Insurance Company | Determination of driver or vehicle discounts and risk profiles based upon vehicular travel environment |
| US20170089717A1 (en) * | 2015-09-29 | 2017-03-30 | Garmin Switzerland Gmbh | Use of road lane data to improve traffic probe accuracy |
| JP6316265B2 (ja) * | 2015-12-01 | 2018-04-25 | 本田技研工業株式会社 | 車線変更制御装置 |
| US10735993B2 (en) * | 2016-05-05 | 2020-08-04 | Telefonaktiebolaget Lm Ericsson (Publ) | System and method for congestion control in a communication system |
| WO2017218003A1 (en) * | 2016-06-17 | 2017-12-21 | Nokia Technologies Oy | V2v latency measurement reporting to traffic server for optimizing the inter vehicle distance for self-driving cars |
| US10625742B2 (en) * | 2016-06-23 | 2020-04-21 | Honda Motor Co., Ltd. | System and method for vehicle control in tailgating situations |
| CN106056910A (zh) * | 2016-07-13 | 2016-10-26 | 乐视控股(北京)有限公司 | 一种交通状态检测方法和装置 |
| CN106295560B (zh) * | 2016-08-09 | 2019-06-18 | 浙江零跑科技有限公司 | 基于车载双目相机和分段式pid控制的车道保持方法 |
| CN106097735B (zh) * | 2016-08-22 | 2018-08-17 | 安徽科力信息产业有限责任公司 | 基于平面感知检测技术的潮汐车道信号灯控制方法及系统 |
| MY193589A (en) * | 2017-01-20 | 2022-10-19 | Univ Putra Malaysia | A method for controlling congestion in communication system |
| KR20180087968A (ko) * | 2017-01-26 | 2018-08-03 | 한국전자통신연구원 | 자율 주행 장치 및 그 방법 |
| WO2018215833A1 (en) * | 2017-05-23 | 2018-11-29 | 1.21 Gigawatts Ltd. | Traffic monitoring and management systems and methods |
| KR102421855B1 (ko) * | 2017-09-28 | 2022-07-18 | 삼성전자주식회사 | 주행 차로를 식별하는 방법 및 장치 |
| US10628671B2 (en) * | 2017-11-01 | 2020-04-21 | Here Global B.V. | Road modeling from overhead imagery |
| US10629069B2 (en) * | 2017-12-14 | 2020-04-21 | Here Global B.V. | Method and apparatus for providing a localized link-centric metric for directional traffic propagation |
| US11027736B2 (en) * | 2018-04-27 | 2021-06-08 | Honda Motor Co., Ltd. | Systems and methods for anticipatory lane change |
| US11572099B2 (en) * | 2018-04-27 | 2023-02-07 | Honda Motor Co., Ltd. | Merge behavior systems and methods for merging vehicles |
| US11009890B2 (en) * | 2018-09-26 | 2021-05-18 | Intel Corporation | Computer-assisted or autonomous driving assisted by roadway navigation broadcast |
-
2018
- 2018-11-28 US US16/202,095 patent/US11232705B2/en active Active
-
2019
- 2019-11-28 JP JP2019215292A patent/JP7247868B2/ja active Active
- 2019-11-28 CN CN201911190053.3A patent/CN111243268B/zh active Active
-
2022
- 2022-01-24 US US17/583,027 patent/US11694548B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020113259A (ja) | 2020-07-27 |
| JP7247868B2 (ja) | 2023-03-29 |
| US11232705B2 (en) | 2022-01-25 |
| CN111243268A (zh) | 2020-06-05 |
| US20220148420A1 (en) | 2022-05-12 |
| US20200168084A1 (en) | 2020-05-28 |
| US11694548B2 (en) | 2023-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111243268B (zh) | 用于缓解道路上的交通振荡的方法和系统 | |
| CN110364006B (zh) | 机器学习增强的车辆合流 | |
| US11151868B2 (en) | Remote vehicle control at intersections | |
| US20230166734A1 (en) | Virtualized Driver Assistance | |
| US11155262B2 (en) | Vehicular mitigation system based on wireless vehicle data | |
| US9280899B2 (en) | Dynamic safety shields for situation assessment and decision making in collision avoidance tasks | |
| US11482109B2 (en) | Cooperative vehicle monitoring | |
| US11451974B2 (en) | Managing regionalized vehicular communication | |
| US11455890B2 (en) | Traffic-adaptive deployment of vehicle functions | |
| US11697410B2 (en) | Vehicle-to-everything communication-based lane change collision avoidance warning | |
| US20210039664A1 (en) | Machine learning system for modifying adas behavior to provide optimum vehicle trajectory in a region | |
| US20230339492A1 (en) | Generating and depicting a graphic of a phantom vehicle | |
| US10788990B2 (en) | Vehicle with improved I/O latency of ADAS system features operating on an OS hypervisor | |
| US11659372B2 (en) | Adaptive sensor data sharing for a connected vehicle | |
| US11564116B2 (en) | Asynchronous observation matching for object localization in connected vehicles | |
| US20220375345A1 (en) | Hierarchical Computing Architecture for Traffic Management |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |