CN111173838A - Radial non-coupling three-degree-of-freedom direct-current hybrid magnetic bearing - Google Patents
Radial non-coupling three-degree-of-freedom direct-current hybrid magnetic bearing Download PDFInfo
- Publication number
- CN111173838A CN111173838A CN202010055294.3A CN202010055294A CN111173838A CN 111173838 A CN111173838 A CN 111173838A CN 202010055294 A CN202010055294 A CN 202010055294A CN 111173838 A CN111173838 A CN 111173838A
- Authority
- CN
- China
- Prior art keywords
- radial
- iron core
- axial
- rotor
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000008878 coupling Effects 0.000 title claims abstract description 11
- 238000010168 coupling process Methods 0.000 title claims abstract description 11
- 238000005859 coupling reaction Methods 0.000 title claims abstract description 11
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 claims abstract description 103
- 239000000725 suspension Substances 0.000 claims abstract description 50
- 238000004804 winding Methods 0.000 claims abstract description 21
- 239000000696 magnetic material Substances 0.000 claims description 3
- 229910052761 rare earth metal Inorganic materials 0.000 claims description 2
- 150000002910 rare earth metals Chemical class 0.000 claims description 2
- 239000000463 material Substances 0.000 claims 1
- 230000004907 flux Effects 0.000 abstract description 22
- 230000003068 static effect Effects 0.000 abstract description 4
- 238000007667 floating Methods 0.000 description 8
- 238000007789 sealing Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/0485—Active magnetic bearings for rotary movement with active support of three degrees of freedom
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0459—Details of the magnetic circuit
- F16C32/0461—Details of the magnetic circuit of stationary parts of the magnetic circuit
- F16C32/0465—Details of the magnetic circuit of stationary parts of the magnetic circuit with permanent magnets provided in the magnetic circuit of the electromagnets
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/047—Details of housings; Mounting of active magnetic bearings
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
Abstract
本发明公开一种径向无耦合三自由度直流混合磁轴承,包括径向定子、轴向定子和位于定子内圈的转子,径向定子由左径向铁心和右径向铁心组成;左、右径向铁心分别沿内圆周均匀分布两个悬浮齿;左右定子铁心的外侧分别为左、右径向磁化永磁环;悬浮齿上均绕制集中式径向控制绕组;轴向定子由左轴向铁心和右轴向铁心组成;在左径向铁心和右径向铁心两侧,且靠近轴向定子内侧设置有相串联的轴向控制绕组;所述转子包括圆柱形转子铁心与转轴。本发明由永磁环作用提供静态偏置磁通,径向控制绕组通电产生的径向控制磁通调节相应的偏置磁通;该结构的混合磁轴承X和Y方向悬浮独立设计,实现悬浮力在X‑Y方向无耦合,控制简单。
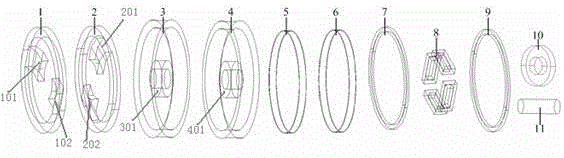
The invention discloses a radial non-coupling three-degree-of-freedom DC hybrid magnetic bearing, comprising a radial stator, an axial stator and a rotor located in the inner ring of the stator. The radial stator is composed of a left radial iron core and a right radial iron core; The right radial iron core distributes two suspension teeth evenly along the inner circumference respectively; the outer sides of the left and right stator iron cores are respectively the left and right radial magnetized permanent magnet rings; the suspension teeth are wound with centralized radial control windings; the axial stator consists of the left The axial iron core and the right axial iron core are composed; axial control windings in series are arranged on both sides of the left radial iron core and the right radial iron core and close to the inner side of the axial stator; the rotor includes a cylindrical rotor iron core and a rotating shaft. In the present invention, the static bias magnetic flux is provided by the permanent magnet ring, and the radial control magnetic flux generated by the energization of the radial control winding adjusts the corresponding bias magnetic flux. The force is uncoupled in the X‑Y direction, and the control is simple.
Description
Claims (5)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010055294.3A CN111173838B (en) | 2020-01-17 | 2020-01-17 | Radial uncoupled three-degree-of-freedom direct current hybrid magnetic bearing |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010055294.3A CN111173838B (en) | 2020-01-17 | 2020-01-17 | Radial uncoupled three-degree-of-freedom direct current hybrid magnetic bearing |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111173838A true CN111173838A (en) | 2020-05-19 |
| CN111173838B CN111173838B (en) | 2023-05-26 |
Family
ID=70625416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010055294.3A Active CN111173838B (en) | 2020-01-17 | 2020-01-17 | Radial uncoupled three-degree-of-freedom direct current hybrid magnetic bearing |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111173838B (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112065854A (en) * | 2020-09-17 | 2020-12-11 | 淮阴工学院 | A combined three-degree-of-freedom hybrid magnetic bearing with a new structure |
| CN116658520A (en) * | 2023-05-05 | 2023-08-29 | 淮阴工学院 | Outer rotor radial six-pole three-degree-of-freedom alternating current-direct current hybrid magnetic bearing and parameter design method |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06296345A (en) * | 1993-04-08 | 1994-10-21 | Shin Meiwa Ind Co Ltd | Magnetic bearing integrated in motor |
| DE202004020504U1 (en) * | 2004-03-31 | 2005-08-04 | Drägerwerk AG | Magnetic bearing system comprises two radial bearings consisting of rotor suspended between two electromagnets, magnetic field sensors mounted on either side of stators between electromagnets being used to measure position of rotor |
| JP2008169965A (en) * | 2007-01-15 | 2008-07-24 | Matsushita Electric Ind Co Ltd | Magnetic bearing device |
| CN101696713A (en) * | 2009-10-15 | 2010-04-21 | 山东科技大学 | Radial magnetic bearing of low-power consumption inner rotor of permanent-magnetic up-attracting and down-repelling structure |
| JP2011085223A (en) * | 2009-10-16 | 2011-04-28 | Hokkaido Univ | Triaxial active control type magnetic bearing and rotary machine using the same |
| CN102322481A (en) * | 2011-08-31 | 2012-01-18 | 北京航空航天大学 | Radial decoupling taper magnetic bearing with three degree of freedom |
| CN104141685A (en) * | 2014-08-06 | 2014-11-12 | 贾新涛 | Driving and driven inner rotor magnetic bearing |
| CN107191483A (en) * | 2017-04-27 | 2017-09-22 | 江苏大学 | A kind of design method of the pole hybrid magnetic bearing of Three Degree Of Freedom three |
| CN108712047A (en) * | 2018-06-30 | 2018-10-26 | 淮阴工学院 | A kind of Three Degree Of Freedom bearing-free switch reluctance motor |
| CN108808915A (en) * | 2018-06-30 | 2018-11-13 | 淮阴工学院 | A kind of Three Degree Of Freedom permanent magnet type non-bearing motor |
| CN108847725A (en) * | 2018-06-30 | 2018-11-20 | 淮阴工学院 | A kind of stator permanent-magnet sheet type bearing-free switch reluctance motor |
| KR101963565B1 (en) * | 2018-06-18 | 2019-03-29 | 주식회사 마그네타 | Thrust magnetic bearing using flux switching |
| CN211574040U (en) * | 2020-01-17 | 2020-09-25 | 淮阴工学院 | Radial non-coupling three-degree-of-freedom direct-current hybrid magnetic bearing |
-
2020
- 2020-01-17 CN CN202010055294.3A patent/CN111173838B/en active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06296345A (en) * | 1993-04-08 | 1994-10-21 | Shin Meiwa Ind Co Ltd | Magnetic bearing integrated in motor |
| DE202004020504U1 (en) * | 2004-03-31 | 2005-08-04 | Drägerwerk AG | Magnetic bearing system comprises two radial bearings consisting of rotor suspended between two electromagnets, magnetic field sensors mounted on either side of stators between electromagnets being used to measure position of rotor |
| JP2008169965A (en) * | 2007-01-15 | 2008-07-24 | Matsushita Electric Ind Co Ltd | Magnetic bearing device |
| CN101696713A (en) * | 2009-10-15 | 2010-04-21 | 山东科技大学 | Radial magnetic bearing of low-power consumption inner rotor of permanent-magnetic up-attracting and down-repelling structure |
| JP2011085223A (en) * | 2009-10-16 | 2011-04-28 | Hokkaido Univ | Triaxial active control type magnetic bearing and rotary machine using the same |
| CN102322481A (en) * | 2011-08-31 | 2012-01-18 | 北京航空航天大学 | Radial decoupling taper magnetic bearing with three degree of freedom |
| CN104141685A (en) * | 2014-08-06 | 2014-11-12 | 贾新涛 | Driving and driven inner rotor magnetic bearing |
| CN107191483A (en) * | 2017-04-27 | 2017-09-22 | 江苏大学 | A kind of design method of the pole hybrid magnetic bearing of Three Degree Of Freedom three |
| KR101963565B1 (en) * | 2018-06-18 | 2019-03-29 | 주식회사 마그네타 | Thrust magnetic bearing using flux switching |
| CN108712047A (en) * | 2018-06-30 | 2018-10-26 | 淮阴工学院 | A kind of Three Degree Of Freedom bearing-free switch reluctance motor |
| CN108808915A (en) * | 2018-06-30 | 2018-11-13 | 淮阴工学院 | A kind of Three Degree Of Freedom permanent magnet type non-bearing motor |
| CN108847725A (en) * | 2018-06-30 | 2018-11-20 | 淮阴工学院 | A kind of stator permanent-magnet sheet type bearing-free switch reluctance motor |
| CN211574040U (en) * | 2020-01-17 | 2020-09-25 | 淮阴工学院 | Radial non-coupling three-degree-of-freedom direct-current hybrid magnetic bearing |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112065854A (en) * | 2020-09-17 | 2020-12-11 | 淮阴工学院 | A combined three-degree-of-freedom hybrid magnetic bearing with a new structure |
| CN116658520A (en) * | 2023-05-05 | 2023-08-29 | 淮阴工学院 | Outer rotor radial six-pole three-degree-of-freedom alternating current-direct current hybrid magnetic bearing and parameter design method |
| CN116658520B (en) * | 2023-05-05 | 2024-06-11 | 淮阴工学院 | An outer rotor radial six-pole three-degree-of-freedom AC/DC hybrid magnetic bearing and parameter design method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111173838B (en) | 2023-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111075839B (en) | New structure radial two degrees of freedom six-pole AC/DC hybrid magnetic bearing | |
| CN110017330B (en) | Axial radial electromagnetic magnetic bearing | |
| CN111425523A (en) | A hybrid radial permanent magnet bias magnetic bearing | |
| CN111022498B (en) | Radial winding-free hybrid magnetic bearing | |
| WO2019019243A1 (en) | Alternating-current and direct-current five-degree-of-freedom hybrid magnetic bearing having dual spherical surfaces for vehicle-mounted flywheel battery | |
| CN112953309A (en) | Permanent magnet synchronous magnetic suspension motor | |
| CN211778555U (en) | Four-freedom-degree heteropolar multi-sheet structure magnetic bearing | |
| CN111173838A (en) | Radial non-coupling three-degree-of-freedom direct-current hybrid magnetic bearing | |
| CN110131313B (en) | a magnetic bearing | |
| CN211574040U (en) | Radial non-coupling three-degree-of-freedom direct-current hybrid magnetic bearing | |
| WO2021143766A1 (en) | New structure cross-tooth four-pole hybrid magnetic bearing | |
| CN108708904A (en) | Permanent-magnet bearing | |
| CN209892623U (en) | Axial radial electromagnetic magnetic bearing | |
| CN112065856B (en) | Four-pole internal and external double-rotor hybrid magnetic bearing | |
| CN211574039U (en) | New structure radial two-degree-of-freedom hexapole alternating current/direct current hybrid magnetic bearing | |
| CN214534059U (en) | Disc stator type AC/DC hybrid magnetic bearing | |
| CN212564072U (en) | A non-contact hybrid magnetic bearing with inner and outer double stators | |
| CN215009934U (en) | Five-degree-of-freedom single-winding bearingless magnetic suspension motor | |
| CN211343731U (en) | Radial mixed magnetic bearing without winding | |
| CN211574038U (en) | Radial non-coupling quadrupole hybrid magnetic bearing | |
| CN211574037U (en) | Cross-tooth quadrupole hybrid magnetic bearing with novel structure | |
| CN102297202B (en) | Single shaft controlled type five-degrees-of-freedom (DOF) miniature magnetic bearing | |
| CN212028329U (en) | New structure same-polarity quadrupole magnetic bearing | |
| CN212272828U (en) | A Radial Windingless Hybrid Magnetic Bearing Controlled by Outer Windings | |
| CN111022499B (en) | Radial large bearing capacity hybrid magnetic bearing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| EE01 | Entry into force of recordation of patent licensing contract |
Application publication date: 20200519 Assignee: Shanghai Yanqiao Information Technology Co.,Ltd. Assignor: HUAIYIN INSTITUTE OF TECHNOLOGY Contract record no.: X2023980047724 Denomination of invention: Radial uncoupled three degree of freedom DC hybrid magnetic bearing Granted publication date: 20230526 License type: Common License Record date: 20231121 |
|
| EE01 | Entry into force of recordation of patent licensing contract | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20240322 Address after: 230000 Room 203, building 2, phase I, e-commerce Park, Jinggang Road, Shushan Economic Development Zone, Hefei City, Anhui Province Patentee after: Hefei Jiuzhou Longteng scientific and technological achievement transformation Co.,Ltd. Country or region after: China Address before: 223100 A12-2, high tech Industrial Park, three East seven street, Hongze District, Huaian, Jiangsu (Hongze technology transfer center Hongze sub center) Patentee before: HUAIYIN INSTITUTE OF TECHNOLOGY Country or region before: China |
|
| TR01 | Transfer of patent right |