CN109475384B - 自动插入装置 - Google Patents
自动插入装置 Download PDFInfo
- Publication number
- CN109475384B CN109475384B CN201780045997.4A CN201780045997A CN109475384B CN 109475384 B CN109475384 B CN 109475384B CN 201780045997 A CN201780045997 A CN 201780045997A CN 109475384 B CN109475384 B CN 109475384B
- Authority
- CN
- China
- Prior art keywords
- piston
- platform
- coupled
- cylinder
- automated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/32—Surgical robots operating autonomously
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31501—Means for blocking or restricting the movement of the rod or piston
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/46—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests having means for controlling depth of insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
- A61B2017/3409—Needle locating or guiding means using mechanical guide means including needle or instrument drives
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
Abstract
一种用于保持在端部操纵装置中的医疗工具的插入的装置,该装置包括在两个基本正交的方向上提供运动的可移动平台以及两个活塞机构,这两个活塞机构在联接到可移动平台的气缸内工作且通过共用接头在它们的远端附接到端部操纵装置。活塞可以是线性致动器。通过驱动机构线性地推动活塞来操作端部操纵装置。气缸的近端可以联接到共用轴。气缸和活塞的轴线、通过共用接头连接活塞轴线的线以及气缸的共用轴的轴线可以全部基本上位于单个平面中。可移动平台和活塞机构的协同运动使得在医疗工具定向变化时能够保持医疗工具的虚拟远程运动中心。
Description
技术领域
本发明涉及介入治疗领域,具体地涉及用于医疗工具自动插入到对象身体内的靶中的装置、系统和方法。
背景技术
在现代临床实践中应用的许多常规治疗涉及用于活组织检查、药物输送和其他诊断和治疗程序的医疗工具(例如针和导管)的经皮插入。插入程序的目标是将合适的医疗工具的尖端安全精确地放置在靶区域,靶区域可能是病灶、肿瘤、器官或血管。需要这样的医疗工具的插入的治疗的实例包括疫苗接种、血液/液体取样、局部麻醉、组织活检、导管插入、低温消融、电解消融、近距离放射治疗、神经外科手术、深部脑刺激和各种微创手术。
在软组织中的针的引导和转向是要求良好的三维协调、患者的解剖体的知识和高水平经验的复杂工作。因此,用于进行这些功能的图像引导的自动(例如机器人)系统已经被提出。在这些系统中有Stoianovici的美国专利No.7,008,373“用于荧光透视下的机器人寻靶的系统和方法”、Glozman等的美国专利No.8,348,861“柔性针的控制转向”、Neubach等的美国专利No.8,663,130“用于柔性针转向的超声引导机器人”和Glozman等的美国专利申请No.15/027,439“用于机器人图像引导的针插入的夹持器”所描述的那些。
近些年,安装到身体的自动装置已经被引入。这些装置的一部分是帮助选择插入点并帮助将针和插入点以及靶对准的引导装置,然后医师手动插入针。其他装置则是同样将针插向靶的转向装置,例如Gupta等的美国申请公开No.2006/0229641“引导和插入系统”、Kim的美国申请公开No.2009/0112119“旋转活检装置和活检机器人”、Cleary等的美国申请公开No.2014/0371584“用于介入治疗中的针引导的安装到患者的MRI和CT兼容机器人”和Glozman等的美国专利申请公开No.2016/0249990“通过轴操作的针转向”所公开的。
然而,仍需要一种自动插入装置,其能够精确可靠地将医疗工具转向患者身体内的靶并且在为插入装置保持低矮的工作空间的同时为医疗工具提供大角度的工作空间。
说明书的该部分和其他部分提到的每个出版物的公开内容均通过引用整体并入本文。
发明内容
本公开描述了用于将医疗工具(例如针)插入对象的身体内以用于诊断和/或治疗目的的示例性自动系统和装置。
在一些实施方式中,公开了一种插入系统,其包括插入装置、处理器和控制器。插入系统可以用于和成像系统结合工作。所使用的成像模态可以是X射线荧光透视、CT、锥形束CT、CT荧光透视、MRI、超声或任何其他合适的成像模态中的任何一种。
除其他之外,处理器可以被构造为:接收、处理并在显示器上显示来自成像系统(例如CT、MRI)的图像;计算对于医疗工具(例如针)而言从进入点到靶同时避免途中的障碍物的最佳路径;以及根据算得的最佳路径提供使针转向靶的指令。在一些实施方式中,以闭环方式控制针的转向,即处理器通过控制器向插入装置产生运动指令并接收关于针的实际位置的反馈,然后该反馈被用于实时的路径修正。可以在二维平面或者三维空间中计算和执行最佳路径以及路径修正。在一些实施方式中由医师在一个或多个获取的图像上手动标记进入点、靶和障碍物(例如骨头或血管)。
自动的针插入和实时转向相比手动针插入有许多优点。例如,其避免了当医师手动插入针但由于例如在针被插入身体内时组织运动而无法到达靶时经常需要撤回并重新插入针。同时,自动的针转向改善了程序的精确性,这使得能够到达小的靶,因而允许更早地检测例如恶性肿瘤。另外,由于人工失误的风险显著降低,因此其为患者提供了改进的安全性。进一步地,这样的程序对于医护人员来说更安全,因为它最小化了他们在手术期间受到的辐射照射。由于可以从远程地点甚至从医院外控制自动装置,医师不再需要出现在手术室。
在一些实施方式中,插入装置包括至少一个可移动的平台,联接到至少一个可移动的平台的两个活塞机构,以及端部操纵装置,医疗工具直接或通过插入模块联接到端部操纵装置。每个活塞机构可以包括气缸、至少部分地定位在气缸内的活塞,以及被构造为推动活塞进出气缸以便操作端部操纵装置的驱动机构。在一些实施方式中,两个活塞的远端可以被联接到共用接头,气缸的近端可以被联接到共用轴或各自联接到分开的轴。在一些实施方式中,气缸、活塞、活塞的共用接头和气缸的轴均基本上位于单个平面中,使得插入装置的端部操纵装置和医疗工具有较大的角度运动、因而有较大的工作空间。可以理解的是,气缸、活塞、活塞的共用接头和气缸的轴均基本上位于单个平面中可以具体指气缸和活塞的轴线(即纵向轴线)、气缸轴和通过共用接头连接活塞轴线的线全部位于单个平面中。在一些实施方式中,气缸的共用轴的轴线(或分开的轴的轴线)可以平行于通过共用接头连接活塞轴线的线,从而(一个或多个)气缸轴的(一个或多个)轴线、通过共用接头连接活塞轴线的线以及气缸和活塞的轴线可以基本形成梯形。
在本公开中将活塞和气缸机构描述和说明为马达驱动的线性致动器组件,根据流体操作装置类推,触发杆被称作“活塞”,推力管或外壳被叫做“气缸”。然而,需要理解的是尽管电机致动装置通常被理解为最简单的和最可控的实施方式,但是也可以使用常规的气动或液压气缸连同它们的活塞来实施该装置。因此,当术语“气缸”和“活塞”在本公开中使用以及在要求保护时,应被理解为包括任何可控制的线性运动产生装置。
在一些实施方式中,端部操纵装置可以通过一个或多个万向节被联接到插入装置的至少一个可移动平台之一。例如,端部操纵装置可以通过两个万向节被联接到可移动平台:第一万向节位于其顶端,第二万向节位于其底端。在一些实施方式中,第一(顶端)万向节可以通过轴向接头被联接到活塞的共用接头,第二(底端)万向节可以通过另一轴向接头联接到可移动平台的延伸臂构件,从而推动活塞进出气缸导致万向节的旋转,同时气缸、活塞、活塞的共用接头和气缸轴均停留在单个平面中。
延伸臂和活塞机构的结合使端部操纵装置、因而使联接到端部操纵装置的针远离插入装置(例如马达和齿轮)的金属部件,因而最小化了接近针的区域中的成像伪影,该接近针的区域在图像引导的程序中被扫描以便在插入程序期间跟随并确定针的位置。
在一些实施方式中,插入装置可以具有几个自由度(DOF)。例如,装置可以具有五个DOF:向前-向后线性平移和左-右线性平移、前-后旋转和左-右旋转、以及朝向对象身体的纵向针平移。在一些实施方式中,装置可以包括Z平台、X平台和顶部组件,顶部组件包括两个活塞机构。Z平台和X平台可以各自包括沿着Z轴在Z平台的顶部上推动X平台的驱动机构例如滚珠丝杠机构的一部分。X平台和顶部组件可以各自包括沿着可能垂直于Z轴的X轴在X平台的顶部上推动顶部组件的另一驱动机构(也可以是滚柱丝杠机构)的一部分。因而Z平台、X平台和顶部组件的结合实现了顶部组件的完全的平面运动,因而实现了联接到顶部组件的端部操纵装置的完全的平面运动。在一些实施方式中,顶部组件的每个活塞机构可以包括气缸和例如通过滚珠丝杠机构可移动地进出气缸的活塞。控制活塞的运动为装置提供了两个旋转自由度。在一些实施方式中,通过插入机构实现纵向的针平移,该插入机构可以被联接到端部操纵装置或者在端部操纵装置和可联接到端部操纵装置的插入模块之间被划分,该插入模块包括针。
尽管通常线性针轨迹是优选的,但是由于靶(例如肿瘤、病灶)的位置、障碍物(例如骨头、血管)的存在等,并不总是能够设计线性轨迹,因此设计的轨迹可以具有一定的曲度。进一步地,即使设计轨迹是线性的,但是由于在插入程序期间靶和/或障碍物的运动,并不总是能够遵循设计的线性轨迹。在这种情况下,在插入程序期间可以调节针轨迹,例如上述美国专利No.8,348,861所描述的。
在一些实施方式中,端部操纵装置的远程运动中心(RCM)可以是虚拟的并且位于对象身体上的针进入点处,即虚拟RCM并不由设计所固定而是根据选择的进入点而改变。一旦选择了针进入点,用户可以将选择的进入点设定为虚拟RCM。然后系统的软件可以使用反向运动学算法确定在端部操纵装置被旋转时X平台和/或顶部组件所需的线性运动,以便将进入点保持为虚拟RCM,如例如上述美国专利No.8,348,861所描述的。如果不能遵循线性轨迹和/或如果在针被插入患者的身体时设计轨迹(线性的或其他的)需要调整,则虚拟RCM位于针进入点处可以避免皮肤/组织撕裂。
在一些实施方式中,针的整个角度工作空间可以形成圆锥形状,同时其顶点为虚拟RCM,即位于选择的针进入点处。
因此,根据本公开中描述的装置的示例性实施方式,提供一种用于将医疗工具插入对象的身体内的自动装置,包括:
(i)至少一个可移动的平台,
(ii)第一活塞机构和第二活塞机构,每个活塞机构包括:
气缸;
活塞,活塞的至少一部分定位在气缸内,和
驱动机构,其被构造为可控制地推动活塞进出气缸;以及
(iii)插入机构,其被构造为让医疗工具沿着对象身体的方向运动,
其中第一活塞机构和第二活塞机构的活塞的远端被联接到共用接头。
在这样的自动装置中,气缸和活塞的轴线以及将活塞的联接点与共用接头连接的线可以全部基本上位于单个平面中。轴线可以是气缸的纵向轴线和活塞的纵向轴线。
进一步地,在这样的自动装置中,第一活塞机构和第二活塞机构的活塞的远端可以通过活塞端部接头被联接到共用接头,每个活塞端部接头具有至少一个旋转自由度。在上述两个装置的任一个中,第一活塞机构和第二活塞机构的气缸的近端可以被联接到单个轴,还位于单个平面。在这种情况下,气缸的近端可以通过气缸端部接头被联接到单个轴,每个气缸端部接头具有至少一个旋转自由度。
另外,在上述任一可选实施方式中,至少一个可移动的平台可以包括:
(i)适于在第一线性方向上移动的第一平台,和
(ii)联接到第一平台且适于在基本上垂直于第一线性方向的第二线性方向上移动的第二平台,
其中第一活塞机构和第二活塞机构被联接到第二平台。
进一步地,在这些装置的任意一个中,驱动机构可以包括螺纹轴和可操作地联接到螺纹轴并刚性连接到活塞的内螺纹螺母,从而螺纹轴的旋转引起活塞的线性运动。
上述装置的另一其他示例实施方式可以进一步包括联接到共用接头的端部操纵装置。端部操纵装置可以通过第一万向节被联接到共用接头,第一万向节可以通过旋转接头联接到共用接头。
在上述装置的任意一个中,第二平台可以包括延伸臂和联接到延伸臂的第二万向节。然后插入机构的至少第一部分可以被联接到端部操纵装置。在后一情况中,装置可以进一步包括插入模块,插入模块包括医疗工具和插入机构的至少第二部分,插入机构的第一部分被构造为可操作地联接到插入机构的第一部分。
在上述装置的任意一个中,自动装置可以包括位于对象的身体上的所选择的进入点处的虚拟远程运动中心,然后医疗工具的角度工作空间应该形成圆锥形状,圆锥的顶点位于虚拟的远程运动中心。
进一步的实施方式涉及前述装置,该装置进一步包括至少一个配准元件。前述装置可以进一步包括适于固定到对象的身体的基座。在后者的情况中,基座可以包括印刷电路板,自动装置可以进一步包括被构造为将印刷电路板连接到至少一个可移动平台的至少一个另外的印刷电路板的至少一个电线。至少一个电线中的一个或多个可以包括扁平柔性电缆。
又一其他实施方式可以涉及根据上述实施方式的任意一个的自动装置,该自动装置进一步包括被构造为联接到至少一个可移动平台、第一活塞机构和第二活塞机构中的一个或多个的一个或多个传感器。在这种情况下,一个或多个传感器中的至少第一传感器可以被构造为测量与医疗工具和身体组织之间的相互作用关联的参数。第一传感器可以是力传感器。
在包括传感器的上述自动装置的任意一个中,一个或多个传感器中的至少第二传感器可以被构造为监控至少一个可移动平台、第一活塞和第二活塞的中一个或多个的运动。
根据本公开的另外的实施方式,进一步提供了用于将医疗工具插入对象的身体内的自动装置,包括:
(i)装置基座,
(ii)第一平台,第一平台联接到装置基座且包括第一驱动机构的第一部分,
(iii)联接到第一平台的第二平台,第二平台包括第一驱动机构的第二部分和第二驱动机构的第一部分,第一驱动机构被构造为沿第一线性方向推动第二平台,
(iv)联接到第二平台的第三平台,第三平台包括第二驱动机构的第二部分以及第一活塞和第二活塞,第二驱动机构被构造为沿基本上垂直于第一线性方向的第二线性方向推动第三平台,第一活塞和第二活塞在它们的远端连接到共用接头,
(v)联接到共用接头的端部操纵装置,端部操纵装置被构造为将医疗工具联接到其上。
在这样的自动装置中,第一活塞和第二活塞的轴线以及通过共用接头连接活塞轴线的线可以基本上位于单个平面中。
这样的自动装置可以进一步包括插入模块,插入模块包括医疗工具且被构造为联接到端部操纵装置。另外,在这样的自动装置中,端部操纵装置可以包括第三驱动机构的第一部分,并且插入模块可以包括第三驱动机构的第二部分,第三驱动机构的第二部分可操作地可联接到第三驱动机构的第一部分,第三驱动机构可以被构造为让医疗工具沿着对象身体的方向运动。
在可替换的进一步实施方式中,自动装置可以进一步包括:
(vi)第一气缸和第二气缸,其中第一活塞的至少一部分定位在第一气缸内,第二活塞的至少一部分定位在第二气缸内,
(vii)被构造为可控制地推动第一活塞进出第一气缸的第四驱动机构,和
(viii)被构造为可控制地推动第二活塞进出第二气缸的第五驱动机构。
在这样的构造中,第一气缸和第二气缸的近端可以被联接到单个轴,第一气缸和第二气缸的轴线以及单个轴的轴线可以位于单个平面中。此外,在这些自动装置的任意一个中,端部操纵装置可以通过第一万向节被联接到共用接头,在这种情况下端部操纵装置可以通过第二万向节被进一步联接到第二平台。
在上述装置的任意一个中,自动装置可以包括位于对象身体上的所选择的进入点处的虚拟远程运动中心。
前述装置可以进一步包括适于固定到对象的身体的基座。在后者的情况中,基座可以包括印刷电路板,自动装置可以进一步包括被构造为使印刷电路板连接与联接到第一平台、第二平台和第三平台中的一个或多个的至少一个另外的印刷电路板连接的至少一个电线。至少一个电线中的一个或多个可以包括扁平柔性电缆。
又一其他实施方式可以涉及根据上述实施方式的任意一个的自动装置,该自动装置进一步包括被构造为联接到第一平台、第二平台、第三平台、第一活塞、第二活塞和端部操纵装置中的一个或多个的一个或多个传感器。在这种情况下,一个或多个传感器中的至少第一传感器可以被构造为测量与医疗工具和身体组织之间的相互作用关联的参数。在那种情况下,一个或多个传感器中的至少第一传感器可以被构造为测量与医疗工具和身体组织之间的相互作用关联的参数。第一传感器可以是力传感器。
在包括传感器的上述自动装置的任意一个中,一个或多个传感器中的至少第二传感器可以被构造为监控第一平台、第二平台、第三平台、第一活塞和第二活塞中的一个或多个的运动。
上述系统和装置的实施方式可以进一步包括本公开中描述的任何特征,包括上文描述的关于其他系统和装置的实施方式的任何特征。
应当理解,本公开中使用的术语“近端”和“远端”具有它们在临床领域中通常的含义,即“近端”指的是装置或物体的、最靠近插入或使用该装置或物体的人或机器并且远离患者的端部,而远端指的是装置或物体的、最靠近患者并远离插入或使用该装置或物体的人或机器的端部。
还应理解,尽管贯穿本公开使用的一些示例涉及用于将针插入对象身体内的系统和方法,但这仅仅是出于简化的原因而为,并不意味着本公开的范围仅限于将针插入对象身体内,而应理解为包括将任何医疗工具插入对象身体内以用于诊断和/或治疗目的,包括端口、导引器、导管(例如,消融导管)、套管、手术工具,流体输送工具或任何其他这种可插入工具。
另外,术语“用户”、“医生”、“医师”、“临床医生”、“技术人员”、“医护人员”和“医务人员”在本公开中可互换使用并且可以指代参与所进行的医疗程序的任何人。
附图说明
参考附图描述了本公开的方法和系统的一些示例性实施方式。在附图中,类似的附图标记表示相同或基本相似的元件。
图1示出了用于将医疗工具插入到对象身体内的示例性系统的示意图。
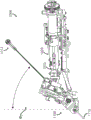
图2示出了示例性自动插入装置的立体图。
图3示出了示例性自动插入装置的爆炸图。
图4示出了示例性插入装置基座的立体图。
图5示出了自动插入装置的示例性机器人平台的立体图。
图6A-6B示出了自动插入装置的另一示例性机器人平台的立体图。
图7A-7B示出了自动插入装置的示例性顶部组件的立体图。
图7C示出了与图7A-7B的顶部组件的活塞联接的共用接头的俯视图。
图7D示出了图7A-7B的顶部组件的活塞机构的纵向截面图。
图8示出了示例性插入组件的爆炸图。
图9示出了示例性自动插入装置的横向截面图,展示了不同平台之间的界面。
图10A-10E描绘了插入组件的示例性旋转范围。
图11描绘了示例性插入组件的整体的角度工作空间。
具体实施方式
图1示出了用于将医疗工具110(例如针)插入到对象的身体15内的系统10的示意图。该系统包括用于在针插入到对象的身体15内的期间使针转向的自动插入装置100。该针110能够可移除地联接到插入装置100,从而该插入装置100可以与新的针一起被反复使用。
在一些实施方式中,系统10可以被构造为与成像系统一起工作,从而插入程序是图像引导的。所使用的成像模态可以是X射线荧光透视、CT、锥形束CT、CT荧光透视、MRI、超声或任何其他合适的成像模态中的任何一种。
插入装置100可以被构造为被直接安装到对象的身体15上,如图1所示,或者它可以被构造为联接到固定至患者的床的专用臂或基座、联接到邻近患者的床放置的小推车、或者联接到成像装置,如同例如上述美国专利申请No.US15/027,438以及Glozman等的美国专利申请No.15/027,439“用于机器人图像引导的针插入的夹持器”所描述的那样,它们均通过引用整体地并入本文。
系统10还包括计算机130,计算机130包括用于图像处理、最佳针插入路线的计算等的至少一个处理器(未示出)以及获取的图像、算得的插入路线等在其上可以被显示的显示器131。计算机130可以是个人计算机(PC)、笔记本电脑、平板电脑、智能手机或任何其他基于处理器的装置。计算机130也可以包括用户界面132,该用户界面可以呈按钮、开关、按键、键盘、电脑鼠标、操纵杆、触摸感应屏等形式。显示器131和用户界面132可以是两个分开的部件或者可以一起形成一个部件例如触摸感应屏(触屏)。
除其他之外,计算机130可以被构造为:接收、处理并在显示器131上可视化从成像系统(例如呈DICOM形式)获取的图像;计算对于医疗工具而言的最佳路径;以及控制针转向,这种控制可以以闭环方式执行,即处理器可以通过控制器120产生对插入装置100的运动指令并接收关于工具的实际位置的反馈,然后该反馈被用于实时的路径修正。在一些实施方式中,可以基于用户的输入计算最佳路径,用户的输入例如是用户在所获取的图像的至少一个上标记的进入点、靶和在途中要避免的区域(也被称为“障碍物”)。在其他实施方式中,处理器还可以被构造为识别并标记靶、障碍物和最佳进入点。可以在二维平面或者三维空间中计算最佳路径。在一些实施方式中,可以在二维平面中计算针路线,然而,由于例如组织运动,不能遵循设计路线并且不能调整针路线使其保持在计算原始路线的同一平面中,因此在三维空间中执行实时的路径修正。
系统10还包括控制器120例如机器人控制器,其控制插入装置100的运动和医疗工具110朝向对象的身体15内的靶(例如病灶或肿瘤)的转向。取决于设计轨迹,针转向可以在二维平面或者三维空间中进行。在一些实施方式中,控制器120还可以被构造为控制在系统10中实施的传感器(未示出)的工作,例如力传感器和/或加速传感器的工作。例如在Shochat等人共同拥有的国际专利申请No.PCT/IL2016/051013“用于引导医疗工具的插入的系统和方法”中描述了用于感测与医疗工具和身体组织之间的相互作用相关联的参数的传感器(例如力传感器)的使用,并且利用传感器数据来引导医疗工具的插入和/或启动成像,该专利的全部内容通过引用合并于此。
控制器120可以是分离的部件,如图1所示。可选地,控制器120的至少一部分可以嵌入插入装置100和/或计算机130内。
图2示出了具有五个自由度(DOF)的示例性自动插入装置20的立体图:由Z平台230提供的沿着Z轴的线性平移(前后)、由X平台240提供的沿着X轴的线性平移(左右)、关于X轴的旋转R1(向前-向后)、关于Z轴的旋转R2(左-右)、以及由插入机构提供的插入,即沿着Y轴的针的纵向平移,其中旋转均由顶部组件250提供。插入机构可以是端部操纵装置(EEFF)260的一部分,被联接到EEFF的插入模块(IM)270,或者在EEFF和IM之间被划分,下文将进行详细解释。
插入装置20还可以包括基座220。在一些实施方式中,插入装置20可以被直接附接到对象的身体,因此,基座220可以设有带(图2中未示出)和用于将带连接到基座的把手(或者锚)222,或者在基座220的底表面上具有粘合层(未示出),或者使用将基座附接到对象的身体的任何其他合适手段。在其他实施方式中,插入装置20可以通过专用的安装垫225被附接到对象的身体。安装垫225可以至少部分地附接到装置基座220的底部或用于覆盖插入装置20的无菌布(图2中未示出)的底部,或者安装垫225可以先放置在对象的身体上,然后插入装置20或者更具体地说插入装置的基座220被联接到安装垫。安装垫可以被构造为例如垫子,以最小化由于插入装置附接到患者身体而对他/她造成的任何不适。在一些实施方式中,如果插入程序是图像引导的,则安装垫225可以包括一个或多个基准标记器(未示出),基准标记器一起形成可调节的配准框体,该配准框体用于如果装置20位于扫描体外部则在手术期间的任何一点确定插入装置的位置,如例如Roth等共同拥有的国际专利申请No.PCT/IL2016/051396“可调节的配准框体”所描述的,其通过引用整体并入本文。在进一步的实施例中,插入装置20可以通过将装置附接到专用安装基座(或者支架)(未示出)而附接到对象的身体。在Arnold等共同拥有的美国国际专利申请No.PCT/IL2017/050430“用于将医疗装置附接到对象的装置和方法”中公开了示例性附接装置,其通过引用的方式整体并入本文。
插入装置20还可以包括至少一个印刷电路板(PCB)282和电缆/电线283以在控制器和马达以及插入装置的其他电子部件之间提供电连接。在一些实施方式中,至少一个电缆可以被构造为柔性扁平电缆(FFC),例如FFC 284。这样的电缆占据较小的空间并提供较大的柔性和较容易的电缆管理。进一步地,在一些实施方式中,单个FFC可以用于在插入装置的远程电子部件之间提供电连接。在该情形中,例如FFC 284可以在装置20的不同平台之间被多次折叠和弯曲,以电连接基座220和顶部组件250。因此,可以使用单个FFC 284而非多个圆电缆,消除了线耦合问题,占据较小的空间,并提供了具有各自在不同方向上移动的几个基座/平台的复杂插入装置所要求的柔性。
插入装置20还可以包括设置在装置上的特定位置的基准标记器(或配准元件)285,其用于在图像引导的程序中装置到图像空间的配准。
在一些实施方式中,插入装置20可以包括壳体(或盖)290,其至少部分地覆盖并保护装置20的机械和电子部件免受损坏或在其他方面受波及。
图3是图2的示例性插入装置20的爆炸图,该插入装置在图3中被指定为标记30,图3示出了装置基座320、Z平台330、X平台340、顶部组件350、端部操纵装置360和插入模块370。在一些实施方式中,装置基座320可以包括用于将插入装置30附接到对象的身体的机构的至少一部分,例如包括由用户将一个或多个带325联接到其的一个或多个带锚322或者和基座320一起被提供的带325本身。在一些实施方式中,装置的盖(在图中未示出)还可以包括附接机构例如带锚的至少一部分。Z平台330可以被联接到装置基座320(例如使用螺钉),并且它可以包括使X平台340能够沿着Z轴在Z平台330的顶部上线性移动的机构的至少一部分。X平台340可以包括能够使X平台沿着Z轴线性移动的机构的互补部分以及能够使顶部组件350在X平台340的顶部上沿着X轴线性移动的机构的至少一部分。顶部组件350可以包括能够使顶部组件沿着X轴线性移动的机构的互补部分,并且可以进一步包括能够使端部操纵装置360旋转的机构。在一些实施方式中,端部操纵装置360可以通过一个或多个万向节352和354被联接到顶部组件。端部操纵装置360可以包括用于接收插入模块370的壳体(或框体)362,并且还可以包括插入机构的至少一部分,如下将详细解释。插入模块370可以包括整个插入机构,或者在端部操纵装置360包括插入机构的一部分的情形下包括插入机构的互补部分,并且它还可以进一步包括被插入到对象的身体内的医疗工具310。这样的医疗工具可以是针(例如活检针)、导引器、导管等。在一些实施方式中,医疗工具310可以和插入模块370成一体。在一些实施方式中,医疗工具310可以与插入模块370分离,从而在开始插入程序之前由医护人员的成员将医疗工具310联接到插入模块370。
图4示出了示例性装置基座40的立体图。该基座可以包括用于直接或者通过专用的安装垫或安装基座(在图4中均未示出)附接到对象的身体的基座板410。基座板410可以包括例如凹陷412形式的、用于接收Z平台(图4中未示出)并联接到Z平台的专用区域。装置基座40还可以包括多个锚420,带/带子425可以联接到多个锚420以将基座40、因而将插入装置固定到对象的身体。替代地,带/带子425可以被联接到安装垫或安装基座,然后插入装置被联接到安装垫或安装基座。装置基座40可以进一步包括至少一个印刷电路板(PCB)430,其容纳装置的多个电子部件,例如CPU和电线,其中一些在PCB 430和外部部件(例如可以将基座PCB 430连接到控制器(在图4中未示出)的电缆442)之间提供电连接,并且其中一些连接在基座PCB 430和插入装置的其他电子部件(例如在基座PCB 430和X平台PCB(在图4中未示出)之间提供电连接的FFC444)之间。
装置基座40可以进一步包括一个或多个配准元件例如基准标记器450,其在图像引导的程序中用于将插入装置配准到图像空间的步骤。
图5示出了插入装置的示例性Z平台50的立体图。Z平台50可以例如通过使用多个螺钉(未示出)和相应的插槽502被联接到装置基座(在图5中未示出),并且它可以包括使得X平台(在图5中未示出)能够在Z平台50的顶部上沿着Z轴运动的驱动机构的至少一部分。在一些实施方式中,驱动机构可以包括滚珠丝杠(或者丝杆)机构。可以理解滚珠丝杠机构仅仅是沿着Z轴推动X平台的机构的一个示例,替代地或附加地可以实施其他合适的推动机构。
在一些实施方式中,Z平台50可以包括由马达514(例如无刷电机)通过小齿轮516和齿轮518旋转的螺纹轴512,并且X平台可以包括联接到其底表面的内螺纹螺母(在图5中未示出),从而螺纹轴512的旋转被转换为螺母的线性运动并因此被转换为X平台沿着Z轴的线性运动。在一些实施方式中,螺纹轴和螺母可以预装配为一体单元被提供,并且只有在预装配的轴和螺母(即滚珠丝杠机构)被固定到Z平台之后X平台才可以被固定到螺纹螺母。然而,需要注意的是,在本公开中,由于轴在Z平台上保持静止(虽然它确实旋转)而螺母和X平台作为一个整体一起移动,因此轴512被称作Z平台50的一部分且螺母被称作X平台的一部分。
马达514可以设有旋转编码器,例如由德国舍奈希的Faulhaber公司制造的旋转磁性编码器型号IEM3-1024。编码器可以与马达分别提供,或者可以作为马达的一体部分被提供从而马达与其编码器均由标号514指定。
Z平台50还可以包括例如通过滑架(在图5中未示出)引导X平台沿着Z轴的运动的一个或多个轨520,滑架被附接到X平台的底表面并且被构造为和轨520联接从而滑架能够沿着轨520自由移动。线性编码器例如瑞士科隆比耶的Posic公司制造的线性磁性编码器型号ID1101L可以被用于监控X平台沿着Z轴的运动。编码器标尺525可以邻近至少一个轨520定位,并且编码器读取器(在图5中未示出)可以被联接到X平台的底部。也可以利用限位开关以便限制X平台的行进并避免X平台到达轨的端部,如果X平台到达轨的端部可能会破坏插入装置的正常功能或者甚至对X平台和/或轨造成损坏。限位开关可以包括传感器540(例如具有靠近至少一个轨520的每个端部、彼此相对放置的光源(例如红外光源)和光检测器的光电耦合器)和联接到X平台的底表面的至少一个传感器遮断器(在图5中未示出),从而当遮断器在光源和光检测器之间穿过并阻挡发射的光到达光检测器时,可以引起警报和/或可以自动停止X平台的运动。可以理解在公开的装置中实施的限位开关不限于光学传感器,也可以使用其他类型的限位开关,例如基于接近传感器(磁场、电容等)的限位开关。
图6A示出了插入装置的示例性X平台60的仰视立体图。X平台60可以包括联接到其底表面的、和Z平台的螺纹轴配合的内螺纹螺母602。借助Z平台的马达和齿轮的螺纹轴的旋转被转换为螺母602的线性运动且因此被转换成X平台60沿Z轴的线性运动。还示出了滑架604,其与Z平台的轨配合并沿着轨滑动,以便引导并指引X平台60沿着Z轴的线性运动。X平台60可以进一步包括联接到其底表面的线性编码器读取器606和限位开关遮断器608,线性编码器读取器606与Z平台的编码器标尺(在图6A中未示出)一起工作以监控X平台60沿着Z轴的运动,限位开关遮断器608与Z平台的限位开关传感器(在图6A中未示出)一起工作以限制X平台的行进并防止其到达Z平台的轨的端部。
图6B示出了X平台60的俯视立体图。X平台60可以包括使得顶部组件(在图6B中未示出)能够在X平台60的顶部上沿着X轴运动的驱动机构的至少一部分。在一些实施方式中,驱动机构可以包括滚珠丝杠(或者丝杆)机构。可以理解滚珠丝杠机构仅仅是沿着X轴推动顶部组件的机构的一个示例,替代地或附加地可以实施其他合适的推动机构。
在一些实施方式中,X平台60可以包括由马达614(例如无刷电机)通过小齿轮616和一个或多个齿轮618和619而旋转的螺纹轴612,并且顶部组件可以包括联接到其底表面的内螺纹螺母(在图6B中未示出),从而螺纹轴612的旋转被转换为螺母的线性运动并因此被转换为顶部组件沿着X轴的线性运动。在一些实施方式中,螺纹轴和内螺纹螺母可以预装配为一体单元被提供,并且在预装配的轴和螺母(即滚珠丝杠机构)被固定到X平台之后顶部组件可以被固定到螺纹螺母。然而,需要注意的是,在本公开中,由于轴612和X平台作为一个整体一起移动并且螺母和顶部组件作为一个整体一起移动,因此轴612被称作X平台60的一部分且螺母被称作顶部组件的一部分。
马达614可以设有旋转编码器,例如由德国舍奈希的Faulhaber公司制造的旋转磁性编码器型号IEM3-1024。编码器可以与马达分别提供,或者可以与马达一体地被提供从而马达与其编码器均由标号614指定。
X平台60还可以包括例如通过滑架(在图6B中未示出)引导顶部组件沿着X轴的运动的一个或多个轨622,滑架被附接到顶部组件的底表面且被构造为和轨622联接从而滑架能够沿着轨622自由移动。
Z平台和X平台的结合使得顶部组件的完全平面的运动成为可能。线性编码器例如瑞士科隆比耶的Posic公司制造的线性磁性编码器型号ID1101L可以被用于监控顶部组件沿着X轴的运动。编码器标尺625可以邻近至少一个轨622定位,并且编码器读取器(在图6B中未示出)可以联接到顶部组件的底部。也可以利用限位开关,以限制顶部组件的行进并避免顶部组件到达轨622的端部,如果顶部组件到达轨622的端部可能会破坏插入装置的正常功能或者甚至对顶部组件和/或轨622造成损坏。限位开关可以包括传感器644(例如具有靠近至少一个轨622的每个端部、彼此相对放置的光源和光检测器的光电耦合器)和联接到顶部组件的底表面的至少一个传感器遮断器(在图6B中未示出)。可以理解在公开的装置中实施的限位开关不限于光学传感器,也可以可替换地使用其他类型的限位开关,例如基于接近传感器(磁场、电容等)的限位开关。
X平台60可以进一步包括至少一个PCB 630,其容纳X平台的多个电子部件以及多个电线。在一些实施方式中,提供装置基座的PCB和顶部组件的PCB之间的电连接的FFC 650可以机械地联接到X平台60。
图7A示出了插入装置的示例性顶部组件70的仰视立体图。顶部组件70可以包括基座700,和X平台的螺纹轴配合的内螺纹螺母702被联接到基座700的底表面。借助X平台的马达和齿轮的螺纹轴的旋转被转换为螺母702的线性运动,并且因此被转换为顶部基座700和整个顶部组件70的沿着X轴的线性运动。还示出了滑架704,滑架704与X平台的轨配合并且沿着轨滑动,以便引导并指引顶部组件70沿着X轴的线性运动。顶部组件70可以进一步包括联接到其底表面的线性编码器读取器706和限位开关遮断器708,线性编码器读取器706与X平台的编码器标尺(在图7A中未示出)一起工作以监控顶部组件70沿着X轴的运动,限位开关遮断器708与X平台的限位开关传感器(在图7A中未示出)一起工作以限制顶部组件70的行进并避免其到达X平台的轨的端部。
图7B示出了顶部组件70的俯视立体图。顶部组件70可以包括基座部700和从基座部700延伸的臂构件710。延伸臂710可以包括底部万向节715,万向节715联接到延伸臂的远端,装置的端部操纵装置(在图7B中未示出)联接到万向节715。底部万向节715可以通过轴向接头712联接到臂构件710,以在臂710保持其角度位置的同时允许万向节715旋转,并由此允许端部操纵装置旋转。在一些实施方式中,顶部组件臂710可以包括与其联接的至少一个配准元件717,在图像引导的程序中,在将插入装置配准到图像空间的步骤中使用配准元件717。配准元件717可以包括由例如碳制成的管(或者杆)。在一些实施方式中,顶部组件70可以进一步包括力传感器(未示出),该力传感器附接到臂构件710,例如用于测量在医疗工具插入到对象的身体内时施加到医疗工具上的力。力传感器的实时测量可以提供以下功能中的一个或多个:选通功能,即可以使用它们来限定开始感兴趣区域的成像的最佳时间/阶段;监控和引导功能,即可以使用它们来监控插入程序的进程并帮助核实针正跟随其预设轨迹;以及安全功能,即在检测到针已撞击/进入障碍物例如骨头、血管等时可以使用它们来警示临床医生,优选地还提示插入程序的自动停止,这些都如上述国际专利申请No.PCT/IL2016/051013所述。
顶部组件70可以进一步包括定位在顶部组件的基座700和臂构件710上方的活塞机构720。臂构件710和活塞机构720使得针(在图7B中未示出)与装置的金属部件例如马达和齿轮间隔开,并且由此使得在接近针的区域出现成像伪影的可能性最小,该区域被扫描以便在插入程序期间跟随并确定针的位置。
在一些实施方式中,每个活塞机构720可以包括气缸722和活塞724,活塞724例如通过滚珠丝杠机构可移动地进出气缸722。可以理解的是滚珠丝杠机构仅仅是推动活塞进出气缸的一个示例,可以实施其他合适的推动机构。
在一些实施方式中,每个活塞机构720可以包括马达742,马达742通过小齿轮744和齿轮746使得位于气缸722内的螺纹轴(在图7B中未示出)旋转。活塞724可以在其位于气缸722内的近端处包括内螺纹螺母(在图7B中未示出),内螺纹螺母可操作地联接到螺纹轴,从而螺纹轴的旋转被转换为螺母的线性运动,并且因此被转换为所需要的活塞进出气缸722的线性运动。马达742可以设有旋转编码器743以监控其旋转。
在一些实施方式中,每个活塞724的远端可以被联接到具有至少两个旋转DOF的分开的接头,并且两个接头均可以直接连接到端部操纵装置(在图7B中未示出)。这样分开的接头可以被构造为例如球窝接头、万向接头或者任何其他合适的接头。在其他实施方式中,如图7B的立体图和图7C的俯视图所示,活塞724的远端接头725可以被联接到共用接头726,而接头726又被联接到顶部万向节728,装置的端部操纵装置(在图7B和图7C中未示出)除了联接到底部万向节715之外还联接到顶部万向节728。在这样的实施方式中,远端接头725可以具有一个旋转DOF,共用接头726可以有两个旋转DOF。进一步地,在这样的实施方式中,活塞的远端接头725和气缸的近端接头723可以彼此平行从而气缸722和活塞724均可以位于同一平面上,近端接头723可以包括例如万向接头并且为每个气缸722提供两个DOF。使顶部万向节728与共用接头726连接的轴向接头727允许在顶部万向节728所联接的端部操纵装置旋转时气缸722、活塞724和共用接头726均保持在与顶部万向节728相同的平面上。尽管在一些实施方式中每个万向接头723可以联接到分开的轴,但是气缸722和活塞724均位于单个平面也使得两个气缸722的万向接头723的水平轴线被联接到单个轴(或轮轴)。这种气缸722、活塞724、共用接头726和轴730均位于同一平面上的构造允许在简单紧凑的设计中具有较大的角度运动、因而端部操纵装置具有较大的工作空间,而不受例如球窝接头的限制。可以理解的是,尽管图7A-7C中示出的顶部万向节728和底部万向节715具有用于将端部操纵装置联接到其的两个臂,但是在一些实施方式中,万向节中的一个或两个可以仅具有用于将端部操纵装置联接到其的一个臂,或者它们各自可以具有适于将端部操纵装置联接到其的其他合适的构造。
顶部组件70可以进一步包括一个或多个PCB,例如PCB 719可以附接到顶部组件的基座700,另外的PCB 729可以联接到各个气缸722。线性编码器例如瑞士科隆比耶的Posic公司制造的线性磁性编码器型号IDIIOIL可以被用于监控活塞724在气缸722内的运动。线性编码器的标尺7242可以联接到活塞724,编码器读取器7244可以联接到气缸722。也可以利用限位开关7246以便限制活塞724的行进并避免活塞724到达螺纹轴的端部。
图7D示出了图7A-7B的活塞机构之一的截面图。如上所述,每个活塞机构720可以包括气缸722和通过滚珠丝杠机构可移动地进出气缸722的活塞724。每个活塞机构720可以包括马达742,马达742通过小齿轮744和齿轮746使得位于气缸722内的螺纹轴748旋转。活塞724可以在其位于气缸722内的近端处包括内螺纹螺母749,内螺纹螺母可操作地联接到螺纹轴748从而螺纹轴748的旋转被转换为螺母749的线性运动,并且因此被转换为活塞724进出气缸722的线性运动。
图8示出了包括端部操纵装置80和插入模块85的示例性插入组件的爆炸图。插入模块85可以包括两个柔性条带852,这两个柔性条带852沿着它们的宽度联接到一起,但是除了它们包围处于它们的中心线处的针855的区域之外。柔性条带852可以具有沿它们长度的至少一部分延伸并在沿中心线的针位置的任意一侧上的孔8522。插入模块85可以进一步包括具有凸起的辊子(未示出),从而条带852的孔8522和辊子上的凸起接合,当辊子在合适方向上反转时,双条带针组件被促使沿着远端方向,即朝向患者身体。然后条带852从针855剥落,针855前进到患者的身体内。插入模块85可以进一步包括将针头859和条带852的近端固定到一起的针头保持器858。
端部操纵装置80可以包括用于接收插入模块85的框体802。一旦插入模块85被插入框体802中,就可以使用例如螺钉804或任何其他合适的固定机构(例如卡扣机构)将插入模块85锁在其中。端部操纵装置80可以进一步包括马达组件810,马达组件810可以包括设有马达编码器(未示出)的齿轮马达812(即马达和行星齿轮系统),锥齿轮814和PCB 816。马达组件810可以以下述方式致动插入机构:齿轮马达812使锥齿轮814旋转,锥齿轮814又使其所联接的插入模块85的锥齿轮854旋转。然后插入模块85的锥齿轮854使插入模块85的辊子旋转,辊子的反向旋转通过包括辊子的凸起和条带的孔的“计时带状”机构向下拉动所联接的条带852。
在一些实施方式中,端部操纵装置的框体802可以包括用于接收插入模块的锥齿轮854的轴856的专用槽8022,从而在插入模块85被插入框体802以后,锥齿轮854保留在框体802外,以使其联接到端部操纵装置的马达组件810的锥齿轮812。
端部操纵装置80可以进一步包括可以被联接到其框体802的一个或多个配准元件808。
在Galili等共有的国际专利申请No.PCT/IL2015/051158“针插入导向件”中公开了示例性插入组件的进一步的细节和实施例,其整体以引用形式并入本文。
在一些实施方式中,插入模块85是一次性的单次使用单元,端部操纵装置80是可再用的,即端部操纵装置80可以随着新的一次性插入模块85被重复使用。在这种情况下,端部操纵装置80可以是插入装置的一体单元。在其他实施方式中,端部操纵装置80也可以是一次性的,因此与自动插入装置分开提供。在这种情况下,端部操纵装置80和插入模块85可以作为单个一次性单元被提供。
图9示出了插入装置90的横向截面视图,展示了不同平台之间的界面。如上所述,可以通过滚珠丝杠机构推动X平台沿着Z轴的运动和顶部组件沿着X轴的运动。另外,可以通过轨-滑架机构引导X平台和顶部组件的线性运动。
Z-X平台:Z平台930可以包括螺纹轴932,X平台940可以包括可操作地联接到轴932的内螺纹螺母948。借助马达934和齿轮(在图9中未示出)的轴932的旋转被转换为螺母948沿着Z轴的线性运动,并且因此被转换为X平台940沿着Z轴的线性运动。进一步地,Z平台930可以包括一个或多个轨936,X平台940可以包括一个或多个对应的滑架944,滑架944可操作地联接到轨936并且可以沿着轨936自由移动(或者滑动)以引导X平台沿着Z轴的线性运动。
X平台-顶部组件:X平台940包括螺纹轴942,顶部组件950包括可操作地联接到轴942的内螺纹螺母958。借助马达(在图9中未示出)和齿轮945和946的轴942的旋转被转换为螺母958沿着X轴的线性运动,并且因此被转换为顶部组件950沿着X轴的线性运动。进一步地,X平台940可以包括一个或多个轨(在图9中未示出),顶部组件950可以包括一个或多个对应的滑架(在图9中未示出),滑架可操作地联接到轨并且可以沿着轨自由移动(或者滑动)以引导顶部组件沿着X轴的线性运动。在图9中还示出了顶部组件的气缸952,螺纹轴954定位在其中。
图10A-10D示出了四个不同状态中的顶部组件1000,描绘了装置的插入组件即EEFF和IM的示例性旋转范围。
图10A示出了顶部组件1000的侧视图,其中插入组件1100处于其最大的向后定向的旋转角θ1,即插入组件1100最大程度地围绕X轴远离装置旋转。通过向前推动两个活塞1010离开气缸1020,导致针头1112向前旋转且针尖端1110指向后方,即指向装置,从而实现向后的角度。如图所示,不像通常在针头处操作针的现有技术的系统,针的旋转和插入操作均是在靠近患者的身体的、顶部万向节1030和EEFF 1120的联接点处进行的。由于不需要产生可能相当大的针的全长度的旋转和插入所需的运动,本公开的插入系统所需的工作空间显著小于现有技术的系统所需的工作空间。进一步地,如上述美国专利申请No.15/027,438所描述的,该公开的装置能够驱动长度可变的针,同时驱动机构的尺寸和工作空间不依赖于针的长度。
图10B示出了顶部组件1000的侧视图,其中插入组件1100处于其最大的向前定向的旋转角θ2=45°,即插入组件1100最大程度地围绕X轴朝向装置旋转。通过向后推动两个活塞1010进入气缸1020,导致针头1112向后旋转且针尖端1110指向前方,即远离装置指向,从而实现向前的角度。
图10C示出了顶部组件1000的俯视图,其中插入组件1100处于其最大的向右旋转角θ3=45°(以下在图10E中示出),即插入组件1100最大程度地围绕Z轴旋转到右方(方向“右”参考页面布局)。通过将气缸1020a和1020b旋转到右方实现向右的角度。通过比右活塞1010a被推出右气缸1020b更进一步地将将左活塞1010b推出左气缸1020b来实现这样的旋转。插入组件1100旋转到右方导致针头1112旋转到右方,从而针尖端1110指向左方。
图10D示出了顶部组件1000的俯视图,其中插入组件1100处于其最大的向左旋转角θ4=45°(以下在图10E中示出),即插入组件1100最大程度地围绕Z轴旋转到左方。通过将气缸1020a和1020b旋转到左方实现向左的角度。通过比左活塞1010b被推出左气缸1020b更进一步地将将右活塞1010a推出右气缸1020a来实现这样的旋转。插入组件1100旋转到左方导致针头1112旋转到左方,从而针尖端1110指向右方。
如图10A-10D所示,由于插入组件1100在其整个旋转范围内被旋转,顶部组件的臂构件1050保持静止,并且气缸1020a和1020b、活塞1010a和1010b、轴1025和共用接头1060均保持在同一平面上。
图10E分别说明了图10C和10D的插入组件的最大的向右和向左旋转角θ3和θ4。还分别示出了当针平行于Y轴和当插入组件到达其最大向右旋转角度和最大向左旋转角度时顶部万向节的位置1090A、1090B和1090C。在最大向右旋转角和最大向左旋转角之间的顶部万向节的轨迹在X-Y平面上形成弧形。可以理解的是,在插入组件在最大向前角和最大向后角之间被旋转时顶部万向节的轨迹也在Z-Y平面上形成弧形。
需要理解的是,尽管在图10A-10E中最大的针旋转角θ1=θ2=θ3=θ4=45°,这仅仅是为了简化原因而为。最大旋转角θ1、θ2、θ3和θ4不一定彼此相等。进一步地,它们不限于45°,每个均可以大于或小于45°。
图11描绘了具有两个旋转自由度(第一个在图10A-10B中描绘、第二个在图10C-10E中描绘)的插入组件1100的纵向轴线的整个工作空间1200。在一些实施方式中,插入组件1100的远程运动中心(RCM)可以是虚拟的并且位于针的进入点。尽管插入组件的旋转轴线位于装置的顶部组件的底部万向节处,如图10E所示,但是通过X平台沿着Z轴的线性运动和/或顶部组件沿着X轴的线性运动将虚拟RCM的位置保持在针的进入点。
一旦选择了针的进入点,用户可以将所选择的进入点设置为虚拟RCM。正如例如上述美国专利No.8,348,861所述,然后系统的软件可以使用反向运动学算法确定在插入组件旋转时X平台和/或顶部组件所需的线性运动,以便将进入点保持为虚拟RCM。虚拟RCM被保持在针进入点,这在不能遵循线性针轨迹的情况下和/或如果在针被插入时设计轨迹(线性的或其他的)需要调节时避免了皮肤/组织撕裂。
工作空间1200可以形成圆锥形状,同时其顶点1500作为虚拟RCM位于针的进入点。可以理解的是插入组件的工作空间不一定关于所有轴线对称。如果围绕所有轴线的最大旋转角度相同例如如以上图10A-10E所示,那么工作空间关于所有轴线对称,如图11所示,即形成的圆锥的横向截面是圆形。然而,如果围绕X轴的最大旋转角度不同于围绕Z轴的最大旋转角度例如θ1=θ2=45°且θ3=θ4=55°,那么形成的圆锥的横向截面是椭圆形。在一些实施方式中,最大旋转角度在每个方向均可以不同。进一步地,角度工作空间不一定等同于围绕X轴的旋转和围绕Z轴的旋转,从而工作空间可以是例如矩形的。
尽管这里已经详细公开了特定的实施方式,但是这仅仅是出于说明的目的而通过示例的方式进行的,并不旨在限制所附权利要求的范围。特别地,可以预期,在不脱离由权利要求限定的本公开的精神和范围的情况下,可以进行各种替换、变更和修改。其他方面、优点和修改被认为在权利要求的范围内。所呈现的权利要求是本文公开的实施方式和特征的代表,也可以预期其他未声称的实施方式和特征。因此,其他实施方式在权利要求的范围内。
Claims (35)
1.一种用于将医疗工具插入对象的身体的自动装置,包括:
第一平台,其适于沿第一线性方向移动;和
第二平台,其联接到所述第一平台并且适于在基本上垂直于所述第一线性方向的第二线性方向上移动;
第一活塞机构和第二活塞机构,每个活塞机构包括:
气缸;
活塞,所述活塞的至少一部分定位在所述气缸内;和
驱动机构,所述驱动机构被构造为可控制地推动所述活塞进出所述气缸;以及
插入机构,所述插入机构被构造为让所述医疗工具沿着对象的身体的方向运动,所述插入机构的至少第一部分被联接到所述自动装置的端部操纵装置;
其中所述第一活塞机构和所述第二活塞机构被联接到所述第二平台,
其中所述第一活塞机构和所述第二活塞机构的活塞的远端被联接到共用接头,以及
其中所述端部操纵装置被联接到所述共用接头。
2.根据权利要求1的自动装置,其中所述气缸和所述活塞的轴线,以及连接所述活塞的联接点和所述共用接头的线基本上位于单个平面中。
3.根据权利要求1或2中任一项所述的自动装置,其中所述第一活塞机构和所述第二活塞机构的活塞的所述远端通过活塞端部接头被联接到所述共用接头,每个活塞端部接头具有至少一个旋转自由度。
4.根据权利要求2所述的自动装置,其中所述第一活塞机构和所述第二活塞机构的所述气缸的近端被联接到单个轴,所述单个轴位于所述单个平面中。
5.根据权利要求4所述的自动装置,其中所述气缸的所述近端通过气缸端部接头被联接到所述单个轴,每个气缸端部接头具有至少一个旋转自由度。
6.根据权利要求1所述的自动装置,其中所述驱动机构包括:
螺纹轴;
内螺纹螺母,其可操作地联接到所述螺纹轴并且刚性连接到所述活塞;
其中所述螺纹轴的旋转引起所述活塞的线性运动。
7.根据权利要求1所述的自动装置,其中所述端部操纵装置通过第一万向节联接到所述共用接头。
8.根据权利要求7所述的自动装置,其中所述第一万向节通过旋转接头联接到所述共用接头。
9.根据权利要求1所述的自动装置,其中所述第二平台还包括延伸臂和第二万向节,所述第二万向节将所述端部操纵装置联接到所述延伸臂。
10.根据权利要求1所述的自动装置,还包括插入模块,所述插入模块包括所述医疗工具和所述插入机构的至少第二部分,所述插入机构的所述第二部分被构造为用于可操作地联接到所述插入机构的所述第一部分。
11.根据权利要求1或2中任一项所述的自动装置,其中所述自动装置包括位于对象的身体上的所选择的进入点处的虚拟远程运动中心。
12.根据权利要求11所述的自动装置,其中所述医疗工具的角度工作空间形成圆锥形状,所述圆锥的顶点位于所述虚拟远程运动中心。
13.根据权利要求1或2中任一项所述的自动装置,进一步包括至少一个配准元件。
14.根据权利要求1或2中任一项所述的自动装置,进一步包括适于固定至对象的身体的基座。
15.根据权利要求14所述的自动装置,其中所述基座包括印刷电路板,其中所述自动装置进一步包括至少一个电线,所述至少一个电线被构造为将所述印刷电路板连接到所述第一平台和所述第二平台中的至少一个的至少一个另外的印刷电路板。
16.根据权利要求15所述的自动装置,其中所述至少一个电线中的一个或多个包括扁平柔性电缆。
17.根据权利要求1或2中任一项所述的自动装置,进一步包括一个或多个传感器,所述一个或多个传感器被构造为联接到所述第一平台、所述第二平台、所述第一活塞机构和所述第二活塞机构中的一个或多个。
18.根据权利要求17所述的自动装置,其中所述一个或多个传感器中的至少第一传感器被构造为测量与所述医疗工具和身体组织之间的相互作用关联的参数。
19.根据权利要求18所述的自动装置,其中所述至少第一传感器包括力传感器。
20.根据权利要求19所述的自动装置,其中所述一个或多个传感器中的至少第二传感器被构造为监控所述第一平台、第二平台、所述第一活塞和所述第二活塞中的一个或多个的运动。
21.一种用于将医疗工具插入对象的身体的自动装置,包括:
装置基座;
第一平台,其联接到所述装置基座并且包括第一驱动机构的第一部分;
第二平台,其联接到所述第一平台并且包括:
所述第一驱动机构的第二部分,所述第一驱动机构被构造为沿第一线性方向推动所述第二平台;和
第二驱动机构的第一部分;
第三平台,其联接到所述第二平台并且包括:
第二驱动机构的第二部分,所述第二驱动机构被构造为沿基本上垂直于第一线性方向的第二线性方向推动所述第三平台;和
第一活塞和第二活塞,所述第一活塞和所述第二活塞在它们的远端连接到共用接头;
以及
端部操纵装置,其联接到所述共用接头并且构造为将所述医疗工具联接到其上。
22.根据权利要求21所述的自动装置,其中所述第一活塞和所述第二活塞的轴线以及通过所述共用接头连接所述活塞轴线的线基本上位于单个平面中。
23.根据权利要求21或22中的任一项所述的自动装置,进一步包括插入模块,所述插入模块包括所述医疗工具并且被构造为联接到所述端部操纵装置。
24.根据权利要求23所述的自动装置,其中所述端部操纵装置包括第三驱动机构的第一部分,并且所述插入模块包括所述第三驱动机构的第二部分,所述第三驱动机构的第二部分可操作地可联接到所述第三驱动机构的所述第一部分,其中所述第三驱动机构被构造为让所述医疗工具沿着对象的身体的方向运动。
25.根据权利要求24所述的自动装置,进一步包括:
第一气缸和第二气缸,其中所述第一活塞的至少一部分定位在所述第一气缸内,所述第二活塞的至少一部分定位在所述第二气缸内;
第四驱动机构,其被构造为可控制地推动所述第一活塞进出所述第一气缸;
第五驱动机构,其被构造为可控制地推动所述第二活塞进出所述第二气缸。
26.根据权利要求25所述的自动装置,其中所述第一气缸和所述第二气缸的近端被联接到单个轴,并且其中所述第一气缸和所述第二气缸的轴线以及所述单个轴的轴线位于单个平面中。
27.根据权利要求21或22中任一项所述的自动装置,其中所述端部操纵装置通过第一万向节联接到所述共用接头。
28.根据权利要求27所述的自动装置,其中所述端部操纵装置通过第二万向节联接到所述第三平台。
29.根据权利要求21或22中任一项所述的自动装置,其中所述自动装置包括位于对象的身体上的所选择的进入点处的虚拟远程运动中心。
30.根据权利要求21或22中任一项所述的自动装置,其中所述装置基座包括印刷电路板,并且其中所述自动装置进一步包括至少一个电线,所述至少一个电线被构造为使所述印刷电路板与联接到所述第一平台、所述第二平台和所述第三平台中的一个或多个的至少一个另外的印刷电路板连接。
31.根据权利要求30所述的自动装置,其中所述至少一个电线中的一个或多个包括扁平柔性电缆。
32.根据权利要求21或22中任一项所述的自动装置,进一步包括一个或多个传感器,所述一个或多个传感器联接到所述第一平台、所述第二平台、所述第三平台、所述第一活塞、所述第二活塞和所述端部操纵装置中的一个或多个。
33.根据权利要求32所述的自动装置,其中所述一个或多个传感器的至少第一传感器被构造为测量与所述医疗工具和身体组织之间的相互作用关联的参数。
34.根据权利要求33所述的自动装置,其中所述至少第一传感器包括力传感器。
35.根据权利要求32所述的自动装置,其中所述一个或多个传感器的至少第二传感器被构造为监控所述第一平台、所述第二平台、所述第三平台、所述第一活塞和所述第二活塞中的一个或多个的运动。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662341097P | 2016-05-25 | 2016-05-25 | |
| US62/341,097 | 2016-05-25 | ||
| PCT/IL2017/050584 WO2017203531A1 (en) | 2016-05-25 | 2017-05-25 | Automated insertion device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109475384A CN109475384A (zh) | 2019-03-15 |
| CN109475384B true CN109475384B (zh) | 2022-02-18 |
Family
ID=60411252
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780045997.4A Active CN109475384B (zh) | 2016-05-25 | 2017-05-25 | 自动插入装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US11202684B2 (zh) |
| EP (1) | EP3463142A4 (zh) |
| JP (1) | JP7131834B2 (zh) |
| CN (1) | CN109475384B (zh) |
| CA (1) | CA3024963A1 (zh) |
| IL (1) | IL263144B2 (zh) |
| WO (1) | WO2017203531A1 (zh) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3515325A4 (en) | 2016-09-23 | 2020-05-13 | Xact Robotics Ltd. | UNIVERSAL HOLDER FOR AN APPLICABLE MEDICAL TOOL |
| US10709340B2 (en) * | 2016-12-30 | 2020-07-14 | Higi Sh Llc | Automated fitted cuff blood pressure and arm circumference measuring device |
| IT201800000689A1 (it) * | 2018-01-10 | 2019-07-10 | Tecres Spa | Struttura di supporto per un dispositivo chirurgico e relativo metodo di posizionamento |
| CN112261915A (zh) * | 2018-06-07 | 2021-01-22 | 赞克特机器人有限公司 | 用于可安装在身体上的医疗器械的附接设备 |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| EP3733112A1 (en) * | 2019-05-03 | 2020-11-04 | Globus Medical, Inc. | System for robotic trajectory guidance for navigated biopsy needle |
| CN110279470A (zh) * | 2019-06-14 | 2019-09-27 | 北京罗森博特科技有限公司 | 动态调节装置、动态调节系统及其使用方法 |
| WO2021105992A1 (en) | 2019-11-27 | 2021-06-03 | Xact Robotics Ltd. | Planning and real-time updating a 3d trajectory of a medical instrument |
| US20230010961A1 (en) | 2019-11-30 | 2023-01-12 | Xact Robotics Ltd. | Adjustable cover for an automated medical device |
| CN111643236B (zh) * | 2020-06-15 | 2020-12-29 | 白延平 | 一种心脏支架输送释放装置 |
| US11903663B2 (en) | 2021-08-24 | 2024-02-20 | Hyperion Surgical, Inc. | Robotic systems, devices, and methods for vascular access |
| US11678944B1 (en) | 2022-08-23 | 2023-06-20 | Hyperion Surgical, Inc. | Manipulators and cartridges for robotic-assisted vascular access |
| DE102022106602A1 (de) * | 2022-03-21 | 2023-09-21 | Karl Storz Se & Co. Kg | Medizinische Kinematik mit virtuellem Drehpunkt, medizinischer Roboter sowie Verwendung einer medizinischen Kinematik und eines medizinischen Roboters |
| CN116269783B (zh) * | 2023-03-28 | 2023-12-19 | 北京维卓致远医疗科技发展有限责任公司 | 引导架和手术机器人 |
| CN117338435B (zh) * | 2023-12-05 | 2024-02-06 | 真健康(广东横琴)医疗科技有限公司 | 用于机器人穿刺手术的电动末端执行器及穿刺机器人 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201537120U (zh) * | 2009-11-27 | 2010-08-04 | 王共先 | 一种带有持镜功能的经皮穿刺装置 |
| CN101972159A (zh) * | 2010-11-24 | 2011-02-16 | 哈尔滨工业大学 | 六自由度颈椎骨磨削并联机器人 |
| CN104323861A (zh) * | 2014-11-21 | 2015-02-04 | 山东科技大学 | 三自由度串并混联关节成形手术机器人 |
| CN104739512A (zh) * | 2015-02-28 | 2015-07-01 | 天津大学 | 基于ct或mri图像导航的胸腔穿刺手术机器人 |
| US20150366546A1 (en) * | 2014-06-18 | 2015-12-24 | Siemens Medical Solutions Usa, Inc. | System and method for real-time ultrasound guided prostate needle biopsies using a compliant robotic arm |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100336490C (zh) | 2001-11-08 | 2007-09-12 | 约翰·霍普金斯大学 | 基于图像伺服的荧光透视下的机器人定标的系统和方法 |
| US20060229641A1 (en) | 2005-01-28 | 2006-10-12 | Rajiv Gupta | Guidance and insertion system |
| US8348861B2 (en) | 2006-06-05 | 2013-01-08 | Technion Research & Development Foundation Ltd. | Controlled steering of a flexible needle |
| WO2009059236A2 (en) | 2007-10-31 | 2009-05-07 | Kim Stanley I | Rotating biopsy device and biopsy robot |
| US8663130B2 (en) | 2008-05-28 | 2014-03-04 | Technion Researh & Development Foundation Ltd. | Ultrasound guided robot for flexible needle steering |
| WO2011025886A1 (en) * | 2009-08-26 | 2011-03-03 | Carefusion 2200, Inc. | Mechanisms for positioning and/or holding surgical instruments and performing other functions, and methods of manufacture and use thereof |
| CN102069496A (zh) | 2010-12-15 | 2011-05-25 | 天津大学 | 线性驱动四自由度混联机械手 |
| ES2562838T3 (es) * | 2012-01-31 | 2016-03-08 | Trichoscience Innovations Inc. | Dispositivos de inyección |
| US9326825B2 (en) | 2013-06-17 | 2016-05-03 | Children's National Medical Center | Patient mounted MRI and CT compatible robot for needle guidance in interventional procedures |
| DE202013007831U1 (de) | 2013-09-04 | 2014-09-05 | Isys Medizintechnik Gmbh | Vorrichtung zur Anbringung von medizinischen Zielvorrichtungen u. dgl. |
| WO2015052718A1 (en) | 2013-10-07 | 2015-04-16 | Technion Research & Development Foundation Ltd. | Gripper for robotic image guided needle insertion |
| WO2015052719A1 (en) | 2013-10-07 | 2015-04-16 | Technion Research & Development Foundation Ltd. | Needle steering by shaft manipulation |
| CN113017799A (zh) | 2014-11-29 | 2021-06-25 | 赞克特机器人有限公司 | 插入导引件 |
| WO2017042823A1 (en) | 2015-09-10 | 2017-03-16 | Xact Robotics Ltd. | Systems and methods for guiding the insertion of a medical tool |
| US10806523B2 (en) | 2015-12-28 | 2020-10-20 | Xact Robotics Ltd. | Adjustable registration frame |
| CA3020805A1 (en) | 2016-04-15 | 2017-10-19 | Xact Robotics Ltd. | Devices and methods for attaching a medical device to a subject |
-
2017
- 2017-05-25 CA CA3024963A patent/CA3024963A1/en active Pending
- 2017-05-25 WO PCT/IL2017/050584 patent/WO2017203531A1/en unknown
- 2017-05-25 JP JP2019514882A patent/JP7131834B2/ja active Active
- 2017-05-25 CN CN201780045997.4A patent/CN109475384B/zh active Active
- 2017-05-25 IL IL263144A patent/IL263144B2/en unknown
- 2017-05-25 EP EP17802331.3A patent/EP3463142A4/en not_active Withdrawn
- 2017-05-25 US US16/303,536 patent/US11202684B2/en active Active
-
2021
- 2021-10-07 US US17/496,446 patent/US11751956B2/en active Active
-
2023
- 2023-07-20 US US18/224,246 patent/US20230363839A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201537120U (zh) * | 2009-11-27 | 2010-08-04 | 王共先 | 一种带有持镜功能的经皮穿刺装置 |
| CN101972159A (zh) * | 2010-11-24 | 2011-02-16 | 哈尔滨工业大学 | 六自由度颈椎骨磨削并联机器人 |
| US20150366546A1 (en) * | 2014-06-18 | 2015-12-24 | Siemens Medical Solutions Usa, Inc. | System and method for real-time ultrasound guided prostate needle biopsies using a compliant robotic arm |
| CN104323861A (zh) * | 2014-11-21 | 2015-02-04 | 山东科技大学 | 三自由度串并混联关节成形手术机器人 |
| CN104739512A (zh) * | 2015-02-28 | 2015-07-01 | 天津大学 | 基于ct或mri图像导航的胸腔穿刺手术机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| IL263144A (en) | 2018-12-31 |
| JP2019520183A (ja) | 2019-07-18 |
| US11202684B2 (en) | 2021-12-21 |
| IL263144B2 (en) | 2023-04-01 |
| EP3463142A4 (en) | 2020-02-26 |
| IL263144B (en) | 2022-12-01 |
| US20220022983A1 (en) | 2022-01-27 |
| US11751956B2 (en) | 2023-09-12 |
| CN109475384A (zh) | 2019-03-15 |
| US20230363839A1 (en) | 2023-11-16 |
| US20190290372A1 (en) | 2019-09-26 |
| EP3463142A1 (en) | 2019-04-10 |
| WO2017203531A1 (en) | 2017-11-30 |
| JP7131834B2 (ja) | 2022-09-06 |
| CA3024963A1 (en) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109475384B (zh) | 自动插入装置 | |
| JP7130682B2 (ja) | 器具挿入補償 | |
| CN110868903B (zh) | 用于医疗器械压缩补偿的系统和方法 | |
| US9005217B2 (en) | Robotic drive for catheter | |
| US20220241981A1 (en) | Systems and methods for robotic arm alignment and docking | |
| EP2180830B1 (en) | Robotically controlled catheter and method of its calibration | |
| WO2020263520A1 (en) | Systems and methods for robotic arm alignment and docking | |
| KR20210062043A (ko) | 동시 의료 절차를 위한 시스템 및 방법 | |
| KR20210024472A (ko) | 의료 기구를 위한 정렬 및 부착 시스템 | |
| JP2022533297A (ja) | 組織切除および撮像のためのロボットアームおよび方法 | |
| EP2561821A1 (en) | Tool positioning system | |
| CN109431606B (zh) | 一种血管介入手术机器人组合系统及其使用方法 | |
| EP3831328A1 (en) | Method for maintaining localization of distal catheter tip to target during ventilation and/or cardiac cycles | |
| Li et al. | Development of an MRI-compatible needle driver for in-bore prostate biopsy | |
| JP2023503286A (ja) | 医療器具の3次元軌道の計画およびリアルタイム更新 | |
| WO2023238053A1 (en) | Locking casters for surgical systems | |
| WO2023238059A1 (en) | Locking casters for surgical systems with sensing | |
| CN116829083A (zh) | 用于机器人医疗系统的远程中心和稳定系统 | |
| CN116234513A (zh) | 手术台的动力辅助移动性 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |