CN109009439B - 一种血管介入手术用精密操作装置 - Google Patents
一种血管介入手术用精密操作装置 Download PDFInfo
- Publication number
- CN109009439B CN109009439B CN201810580252.4A CN201810580252A CN109009439B CN 109009439 B CN109009439 B CN 109009439B CN 201810580252 A CN201810580252 A CN 201810580252A CN 109009439 B CN109009439 B CN 109009439B
- Authority
- CN
- China
- Prior art keywords
- precision
- wire
- base
- wire pulling
- reel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Robotics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Instructional Devices (AREA)
Abstract
本发明方案涉及外科手术用设备技术领域,具体提出一种血管介入手术用精密操作装置,包括精密移动机构,精密移动机构上端通过滑动配合设置有精密滑台,精密滑台上端安装有精密基座,精密基座上端两边对称设置有两个水平拉线单元,上端中间还通过拉线单元机架座设置有垂直拉线单元,精密基座上端前侧设置有绕线机构,绕线机构前端设置有导管,水平拉线单元和垂直拉线单元为同样的结构设计,两个水平拉线单元水平设置在精密基座上端,垂直拉线单元垂直设置在精密基座上端。本方案能够自动化的实现导管的精密推拉功能,使得医生能够在控制室操纵手术现场专用的精密输送机构完成导管的推拉操作。
Description
技术领域
本发明涉及外科手术用设备技术领域,特别涉及一种血管介入手术用精密操作装置。
背景技术
近些年来,随着人们生活水平的提高以及工作节奏的加快,心脑血管疾病已经成为威胁人类生命健康的头号杀手。据统计,我国的心血管疾病发病率逐年升高,而且患者也越来越趋于年轻化。无论在我国的乡村还是城市,心血管疾病正成为导致死亡的首要原因,心血管病每年会造成大约300万人死亡,这占到城市死亡人数的大约41%。
传统的血管介入手术治疗中医生需要暴露在X光辐射下进行手术,手术现场实施手工操作的方式既使医生遭受辐射,严重危害医生的健康,又对操作技术提出很高的要求,无法保证导管介入手术的稳定性和精确性。
随着科技的发展,针对该疾病的治疗手段也在不断进步,国内外专家学者针对血管介入手术机器人进行了研究。天津理工大学的邵林等对血管介入手术机器人主操作器进行了研究,它解决的是手术机器人缺少力反馈、医生难以提高医疗技术的问题,其设计的机器人在医生操作中利用一根实际手术中用到的真实导管,使得医生可以学习到在传统的血管介入手术中所获得的经验技巧。哈尔滨工业大学的刘浩等对弯形可控导管的力学模型及插管装置进行了研究,在插管中其主要使用的行星差动式手柄操纵机构进行插管,操作的自动化程度不够高。
发明内容
本发明的目的在于一定程度上解决上述问题,提供了一种血管介入手术用精密操作装置,能够自动化的实现导管的精密推拉功能,使得医生能够在控制室操纵手术现场专用的精密输送机构完成导管的推拉操作。
本发明方案提出一种血管介入手术用精密操作装置,包括精密移动机构,所述的精密移动机构上端通过滑动配合设置有精密滑台,精密滑台在精密移动机构上滑动,所述的精密滑台上端安装有精密基座,所述的精密基座上端两边对称设置有两个水平拉线单元,上端中间还通过拉线单元机架座设置有垂直拉线单元,精密基座上端前侧设置有绕线机构,所述的绕线机构前端设置有导管。
进一步地,所述的水平拉线单元和垂直拉线单元为同样的结构设计,两个水平拉线单元水平设置在精密基座上端,垂直拉线单元垂直设置在精密基座上端,每个水平拉线单元均包括拉线基座、电机座、减速电机、编码器、绕线轮、侧端绕线滑轮和拉线束线孔座,垂直拉线单元中的拉线基座通过拉线单元机架座垂直固定在精密基座上端,水平拉线单元中的拉线基座通过螺钉水平固定在精密基座上端,所述的拉线基座上对称设置有四个侧端绕线滑轮,每个侧端绕线滑轮两端均设置有两个拉线束线孔座,所述的拉线基座前侧中央设置有电机座安装槽,所述的电机座安装槽中安装有电机座,所述的电机座中安装有减速电机,所述的减速电机后端设置有编码器,所述减速电机的机轴上连接有绕线轮,所述的绕线轮上缠绕有引线。
进一步地,所述的绕线机构包括设置在精密基座上端前侧的绕线轮基座,三个均匀分布在绕线轮基座后侧的绕线轮轴承支撑部,安装在绕线轮轴承支撑部上的绕线轮轴承和绕线轮束线孔座,所述的绕线轮基座前端安装有导线管支架,所述的导线管支架内通过轴孔配合安装有导线管。
进一步地,所述的精密移动机构包括壳体底板,对称设置在壳体底板两端的两块壳体侧板,分别设置在壳体底板前侧的电机壳体前板,壳体底板后侧的壳体后板和两块壳体侧板上端安装的盖板,所述的壳体底板内侧两端对称设置有两排滑台导轨,所述的滑台导轨上通过滑动配合对称安装有多个滑台导轨滑块,所述的滑台导轨滑块上端固定有精密滑台,所述的电机壳体前板外侧安装有伺服电机,所述伺服电机的机轴穿过电机壳体前板,通过联轴器连接有丝杠,所述丝杠的前端通过轴承设置在主轴承座中,丝杠的后端通过轴承设置在副轴承座中,所述的副轴承座安装在壳体后板内侧前端,主轴承座横跨设置在两排滑台导轨上端,所述的丝杠上套装有丝杠螺母,所述的丝杠螺母与精密滑台相连接;所述的伺服电机为松下W型号的精密行星齿轮减速机,其结构紧凑,回程间隙小,精度高,使用寿命长,额定输出扭矩较大。
进一步地,所述的拉线单元还包括拉力检测机构,所述的拉力检测机构包括传感器固定座、拉力传感器、拉力传感器滑轮支架和拉力传感器滑轮轴承,所述的拉力传感器通过传感器固定座固定在拉线基座上端后部,所述的拉力传感器后侧连接有拉力传感器滑轮支架,所述的拉力传感器滑轮支架上通过滑轮轴安装有拉力传感器滑轮轴承。
进一步地,所述的拉线单元还包括张紧机构,所述的张紧机构包括上挡板、弹簧、下挡板、拉线滑轮轴承和拉线滑块,所述的下挡板安装在拉线基座上端中央,所述的下挡板中滑动配合设置有拉线滑块,所述的拉线滑块前端固连有弹簧,所述的下挡板上端通过螺钉安装有上挡板,所述的拉线滑块上设置有拉线滑轮轴承。
进一步地,所述的壳体后板外侧设置有套管机构,所述的套管机构包括安装在壳体后板外侧的套管座,安装在套管座中的套管支架,与套管支架通过轴孔配合安装的套管,所述的套管内设置有导线管,所述的导线管内设置有导管,导管内分布引线。
进一步地,两块所述的壳体侧板外侧均设置有壳体侧板导轨,所述壳体侧板导轨上从前往后通过滑动配合依次设置有第三感应器、第二感应器和第一感应器,所述的精密滑台侧端设置有感应片,所述的第三感应器与第二感应器组成前端限位器,第一感应器为后端限位器,三个感应器均用于感应感应片的位置。
进一步地,所述的主轴承座、副轴承座内侧均设置有多个阻尼圈,阻尼圈用于保护丝杠螺母和精密滑台的运动,防止过度挤压造成损坏。
本方案的有益效果体现在:
1.设计的血管介入手术用精密操作装置包括精密移动机构,精密移动机构上端通过滑动配合设置有精密滑台,精密滑台上端安装有精密基座,精密基座上端两边对称设置有两个水平拉线单元,上端中间还通过拉线单元机架座设置有垂直拉线单元,精密移动机构用于实现对拉线单元位置的调节功能,三个拉线单元中的两个水平拉线单元和一个垂直拉线单元配合工作,实现对三根引线的抽拉,精密基座上端前侧设置有绕线机构,所述的绕线机构前端设置有导管,绕线机构将三个拉线单元中的每条缠绕的引线调整方向,使得三根引线呈六十度夹角进入导管中,实现导管的精密推拉功能,使得医生能够在控制室完成导管的推拉操作,保证医生的健康,提高导管介入手术的稳定性和精确性。
2.设计的拉线单元包括拉力检测机构,拉力检测机构包括传感器固定座、拉力传感器、拉力传感器滑轮支架和拉力传感器滑轮轴承,拉力传感器通过传感器固定座固定在拉线基座上端后部,拉力传感器后侧连接有拉力传感器滑轮支架,拉力传感器滑轮支架上通过滑轮轴安装有拉力传感器滑轮轴承,通过拉线束线孔座后的引线缠绕在拉力传感器滑轮轴承上,通过拉力传感器检测引线的拉力大小,实现手术中引线拉力的监测功能。
3.设计的拉线单元还包括张紧机构,张紧机构包括上挡板、弹簧、下挡板、拉线滑轮轴承和拉线滑块,下挡板安装在拉线基座上端中央,下挡板中滑动配合设置有拉线滑块,拉线滑块前端固连有弹簧,下挡板上端通过螺钉安装有上挡板,拉线滑块上设置有拉线滑轮轴承,通过拉线束线孔座后的引线缠绕在拉线滑轮轴承上,通过拉线滑块与弹簧配合调节引线的速度,使得引线的线速度更加稳定,提高系统的稳定性。
4.在壳体后板外侧设置有套管机构,套管机构包括安装在壳体后板外侧的套管座,安装在套管座中的套管支架,与套管支架通过轴孔配合安装的套管,所述的套管内设置有导线管,所述的导线管内设置有导管,导管内分布引线,套管用于支撑导线管,安装时使得套管支架与导线管支架保持同轴,三根引线在导线管中运动。
附图说明
图1为本发明的血管介入手术用精密操作装置的整体结构示意图;
图2为图1中去除精密移动机构的后部分机构后的结构示意图;
图3为本发明中的精密移动机构去除盖板后的结构示意图;
图4为本发明中精密基座、水平拉线单元、绕线机构、垂直拉线单元和拉线单元机架座的结构示意图;
图5为本发明中拉线单元的结构示意图;
图6为本发明的拉线单元中去除电机座、减速电机、编码器和绕线轮后的结构示意图;
图7为本发明的拉线单元中张紧机构的结构示意图;
图8为本发明中绕线机构的结构示意图。
图中:1、精密移动机构;2、精密滑台;3、精密基座;4、水平拉线单元;5、绕线机构;6、垂直拉线单元;7、拉线单元机架座;8、套管机构;9、导管;10、引线;11、壳体底板;12、壳体侧板;13、电机壳体前板;14、壳体后板;15、壳体侧板导轨;16、滑台导轨;17、滑台导轨滑块;18、伺服电机;19、联轴器;110、主轴承座;111、副轴承座;112、丝杠螺母;113、丝杠;114、第一感应器;115、第二感应器;116、第三感应器;117、感应片;118、阻尼圈;119、盖板;41、拉线基座;42、电机座;43、减速电机;44、编码器;45、绕线轮;46、侧端绕线滑轮;47、拉线束线孔座;48、传感器固定座;49、拉力传感器;410、拉力传感器滑轮支架;411、拉力传感器滑轮轴承;412、上挡板;413、弹簧;414、下挡板;415、拉线滑轮轴承;416、拉线滑块;417、电机座安装槽;51、绕线轮基座;52、绕线轮轴承支撑部;53绕线轮轴承;54、绕线轮束线孔座;55、导线管支架;56、导线管;81、套管座;82、套管支架;83、套管。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施方式,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅用以解释本发明,并不用于限定本发明。
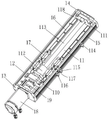
如图1、图2所示,本发明方案提出一种血管介入手术用精密操作装置,包括精密移动机构1,精密移动机构1用于实现对拉线单元位置的调节功能,所述的精密移动机构1上端通过滑动配合设置有精密滑台2,精密滑台2在精密移动机构1上滑动,所述的精密滑台2上端安装有精密基座3,所述的精密基座3上端两边对称设置有两个水平拉线单元4,上端中间还通过拉线单元机架座7设置有垂直拉线单元6,三个拉线单元中的两个水平拉线单元4和一个垂直拉线单元6配合工作,实现对三根引线10的抽拉,精密基座3上端前侧设置有绕线机构5,所述的绕线机构5前端设置有导管9,绕线机构5将三个拉线单元中的每条缠绕的引线10调整方向,使得三根引线10呈六十度夹角进入导管9中。
进一步地,如图4至图7所示,所述的水平拉线单元4和垂直拉线单元6为同样的结构设计,两个水平拉线单元4水平设置在精密基座3上端,垂直拉线单元6垂直设置在精密基座3上端,每个水平拉线单元均包括拉线基座41、电机座42、减速电机43、编码器44、绕线轮45、侧端绕线滑轮46和拉线束线孔座47,垂直拉线单元6中的拉线基座41通过拉线单元机架座7垂直固定在精密基座3上端,水平拉线单元4中的拉线基座41通过螺钉水平固定在精密基座3上端,所述的拉线基座41上对称设置有四个侧端绕线滑轮46,每个侧端绕线滑轮46两端均设置有两个拉线束线孔座47,所述的拉线基座41前侧中央设置有电机座安装槽417,所述的电机座安装槽417中安装有电机座42,所述的电机座42中安装有减速电机43,所述的减速电机43后端设置有编码器44,所述减速电机43的机轴上连接有绕线轮45,所述的绕线轮45上缠绕有引线10,减速电机43工作带动绕线轮45旋转,绕线轮45上缠绕的引线10依次通过多个拉线束线孔座47、侧端绕线滑轮46,实现对引线10的抽拉。
进一步地,如图2、图4和图8所示,所述的绕线机构5包括设置在精密基座3上端前侧的绕线轮基座51,三个均匀分布在绕线轮基座51后侧的绕线轮轴承支撑部52,安装在绕线轮轴承支撑部52上的绕线轮轴承53和绕线轮束线孔座54,所述的绕线轮基座51前端安装有导线管支架55,所述的导线管支架55内通过轴孔配合安装有导线管56,每个拉线单元上缠绕的一根引线10均缠绕在绕线轮束线孔座54上的两个绕线轮轴承53上,而后三根引线10成六十度夹角进入导线管56中。
进一步地,如图2、图3所示,所述的精密移动机构1包括壳体底板11,对称设置在壳体底板11两端的两块壳体侧板12,分别设置在壳体底板11前侧的电机壳体前板13,壳体底板11后侧的壳体后板14和两块壳体侧板12上端安装的盖板119,所述的壳体底板11内侧两端对称设置有两排滑台导轨16,所述的滑台导轨16上通过滑动配合对称安装有多个滑台导轨滑块17,所述的滑台导轨滑块17上端固定有精密滑台2,所述的电机壳体前板13外侧安装有伺服电机18,所述伺服电机18的机轴穿过电机壳体前板13,通过联轴器19连接有丝杠113,所述丝杠113的前端通过轴承设置在主轴承座110中,丝杠113的后端通过轴承设置在副轴承座111中,所述的副轴承座111安装在壳体后板14内侧前端,主轴承座110横跨设置在两排滑台导轨16上端,所述的丝杠113上套装有丝杠螺母112,所述的丝杠螺母112与精密滑台2相连接;所述的伺服电机18为松下400W型号的精密行星齿轮减速机,其结构紧凑,回程间隙小,精度高,使用寿命长,额定输出扭矩较大,伺服电机18工作时通过联轴器19带动丝杠113在主轴承座110和副轴承座111中转动,进而通过丝杠传动带动丝杠螺母112前后运动,带动精密滑台2通过位于两排滑台导轨16上的滑台导轨滑块17前后运动,实现带动三个拉线单元前后运动的功能。
进一步地,如图5至图7所示,所述的拉线单元还包括拉力检测机构,所述的拉力检测机构包括传感器固定座48、拉力传感器49、拉力传感器滑轮支架410和拉力传感器滑轮轴承411,所述的拉力传感器49通过传感器固定座48固定在拉线基座41上端后部,所述的拉力传感器49后侧连接有拉力传感器滑轮支架410,所述的拉力传感器滑轮支架410上通过滑轮轴安装有拉力传感器滑轮轴承411,通过拉线束线孔座47后的引线10缠绕在拉力传感器滑轮轴承411上,通过拉力传感器49检测引线10的拉力大小。
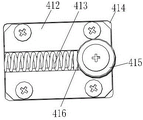
进一步地,如图5至图7所示,所述的拉线单元还包括张紧机构,所述的张紧机构包括上挡板412、弹簧413、下挡板414、拉线滑轮轴承415和拉线滑块416,所述的下挡板414安装在拉线基座41上端中央,所述的下挡板414中滑动配合设置有拉线滑块416,所述的拉线滑块416前端固连有弹簧413,所述的下挡板414上端通过螺钉安装有上挡板412,所述的拉线滑块416上设置有拉线滑轮轴承415,通过拉线束线孔座47后的引线10缠绕在拉线滑轮轴承415上,通过拉线滑块416与弹簧413配合调节引线10的速度,使得引线10的线速度更加稳定,提高系统的稳定性。
进一步地,如图1至图2所示,所述的壳体后板14外侧设置有套管机构8,所述的套管机构8包括安装在壳体后板14外侧的套管座81,安装在套管座81中的套管支架82,与套管支架82通过轴孔配合安装的套管83,所述的套管83内设置有导线管56,所述的导线管56内设置有导管9,导管9内分布引线10,套管83用于支撑导线管56,安装时使得套管支架82与导线管支架55保持同轴,三根引线10在导线管56中运动。
进一步地,如图1至图3所示,两块所述的壳体侧板12外侧均设置有壳体侧板导轨15,所述壳体侧板导轨15上从前往后通过滑动配合依次设置有第三感应器116、第二感应器115和第一感应器114,所述的精密滑台2侧端设置有感应片117,所述的第三感应器116与第二感应器115组成前端限位器,第一感应器114为后端限位器,三个感应器114均用于感应感应片117的位置,前端限位器、后端限位器用于检测精密滑台2的位置,防止其过度移动损坏设备。
进一步地,如图3所示,所述的主轴承座110、副轴承座111内侧均设置有多个阻尼圈118,阻尼圈118用于保护丝杠螺母112和精密滑台2的运动,防止过度挤压造成损坏。
本发明的血管介入手术用精密操作装置用于血管介入手术的插管时,伺服电机18工作通过联轴器19带动丝杠113在主轴承座110和副轴承座111中转动,进而通过丝杠传动带动丝杠螺母112前后运动,带动精密滑台2在滑台导轨滑块17上前后运动,初步调节三个拉线单元的位置;而后减速电机43带动绕线轮45旋转,绕线轮45上缠绕的引线10依次通过多个拉线束线孔座47、侧端绕线滑轮46,通过拉线束线孔座47后的引线10缠绕在拉线滑轮轴承415上,通过拉线滑块416与弹簧413配合调节引线10的速度,使得引线10的线速度更加稳定,提高系统的稳定性,而后引线10缠绕在拉力传感器滑轮轴承411上,通过拉力传感器49检测引线10的拉力大小,三个拉线单元上的三根引线10成六十度夹角进入导线管56中,带动导线管56、引线10的精密运动;精密滑台2运动过程中,第三感应器116与第二感应器115组成前端限位器,第一感应器114为后端限位器,用于检测精密滑台2的位置,防止其过度移动损坏设备。
应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
Claims (8)
1.一种血管介入手术用精密操作装置,包括精密移动机构(1),其特征在于:所述的精密移动机构(1)上端通过滑动配合设置有精密滑台(2),所述的精密滑台(2)上端安装有精密基座(3),所述的精密基座(3)上端两边对称设置有两个水平拉线单元(4),上端中间还通过拉线单元机架座(7)设置有垂直拉线单元(6),精密基座(3)上端前侧设置有绕线机构(5),所述的绕线机构(5)前端设置有导管(9);所述的水平拉线单元(4)和垂直拉线单元(6)为同样的结构设计,两个水平拉线单元(4)水平设置在精密基座(3)上端,垂直拉线单元(6)垂直设置在精密基座(3)上端,每个水平拉线单元均包括拉线基座(41)、电机座(42)、减速电机(43)、编码器(44)、绕线轮(45)、侧端绕线滑轮(46)和拉线束线孔座(47),垂直拉线单元(6)中的拉线基座(41)通过拉线单元机架座(7)固定在精密基座(3)上端,水平拉线单元(4)中的拉线基座(41)通过螺钉固定在精密基座(3)上端,所述的拉线基座(41)上对称设置有四个侧端绕线滑轮(46),每个侧端绕线滑轮(46)两端均设置有两个拉线束线孔座(47),所述的拉线基座(41)前侧中央设置有电机座安装槽(417),所述的电机座安装槽(417)中安装有电机座(42),所述的电机座(42)中安装有减速电机(43),所述的减速电机(43)后端设置有编码器(44),所述减速电机(43)的机轴上连接有绕线轮(45),所述的绕线轮(45)上缠绕有引线(10)。
2.根据权利要求1所述的血管介入手术用精密操作装置,其特征在于:所述的绕线机构(5)包括设置在精密基座(3)上端的绕线轮基座(51),三个均匀分布在绕线轮基座(51)后侧的绕线轮轴承支撑部(52),安装在绕线轮轴承支撑部(52)上的绕线轮轴承(53)和绕线轮束线孔座(54),所述的绕线轮基座(51)前端安装有导线管支架(55),所述的导线管支架(55)内通过轴孔配合安装有导线管(56)。
3.根据权利要求1所述的血管介入手术用精密操作装置,其特征在于:所述的精密移动机构(1)包括壳体底板(11)、对称设置在壳体底板(11)两端的两块壳体侧板(12)、分别设置在壳体底板(11)前侧的电机壳体前板(13)、壳体底板(11)后侧的壳体后板(14)和两块壳体侧板(12)上端安装的盖板(119),所述的壳体底板(11)内侧两端对称设置有两排滑台导轨(16),所述的滑台导轨(16)上通过滑动配合对称安装有多个滑台导轨滑块(17),所述的滑台导轨滑块(17)上端固定有精密滑台(2),所述的电机壳体前板(13)外侧安装有伺服电机(18),所述伺服电机(18)的机轴穿过电机壳体前板(13),通过联轴器(19)连接有丝杠(113),所述丝杠(113)的前端通过轴承设置在主轴承座(110)中,丝杠(113)的后端通过轴承设置在副轴承座(111)中,所述的副轴承座(111)安装在壳体后板(14)内侧前端,主轴承座(110)横跨设置在两排滑台导轨(16)上端,所述的丝杠(113)上套装有丝杠螺母(112),所述的丝杠螺母(112)与精密滑台(2)相连接。
4.根据权利要求1所述的血管介入手术用精密操作装置,其特征在于:所述的拉线单元还包括拉力检测机构,所述的拉力检测机构包括传感器固定座(48)、拉力传感器(49)、拉力传感器滑轮支架(410)和拉力传感器滑轮轴承(411),所述的拉力传感器(49)通过传感器固定座(48)固定在拉线基座(41)上端后部,所述的拉力传感器(49)后侧连接有拉力传感器滑轮支架(410),所述的拉力传感器滑轮支架(410)上通过滑轮轴安装有拉力传感器滑轮轴承(411)。
5.根据权利要求1所述的血管介入手术用精密操作装置,其特征在于:所述的拉线单元还包括张紧机构,所述的张紧机构包括上挡板(412)、弹簧(413)、下挡板(414)、拉线滑轮轴承(415)和拉线滑块(416),所述的下挡板(414)安装在拉线基座(41)上端中央,所述的下挡板(414)中滑动配合设置有拉线滑块(416),所述的拉线滑块(416)前端固连有弹簧(413),所述的下挡板(414)上端通过螺钉安装有上挡板(412),所述的拉线滑块(416)上设置有拉线滑轮轴承(415)。
6.根据权利要求3所述的血管介入手术用精密操作装置,其特征在于:所述的壳体后板(14)外侧设置有套管机构(8),所述的套管机构(8)包括安装在壳体后板(14)外侧的套管座(81),安装在套管座(81)中的套管支架(82),与套管支架(82)通过轴孔配合安装的套管(83),所述的套管(83)内设置有导线管(56),所述的导线管(56)内设置有导管(9),导管(9)内分布引线(10)。
7.根据权利要求3所述的血管介入手术用精密操作装置,其特征在于:两块所述的壳体侧板(12)外侧均设置有壳体侧板导轨(15),所述壳体侧板导轨(15)上从前往后通过滑动配合依次设置有第三感应器(116)、第二感应器(115)和第一感应器(114),所述的精密滑台(2)侧端设置有感应片(117),所述的第三感应器(116)与第二感应器(115)组成前端限位器,第一感应器(114)为后端限位器,三个感应器(114)均用于感应感应片(117)的位置。
8.根据权利要求3所述的血管介入手术用精密操作装置,其特征在于:所述的主轴承座(110)、副轴承座(111)内侧均设置有多个阻尼圈(118)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810580252.4A CN109009439B (zh) | 2018-06-07 | 2018-06-07 | 一种血管介入手术用精密操作装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810580252.4A CN109009439B (zh) | 2018-06-07 | 2018-06-07 | 一种血管介入手术用精密操作装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109009439A CN109009439A (zh) | 2018-12-18 |
| CN109009439B true CN109009439B (zh) | 2021-02-12 |
Family
ID=64612157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810580252.4A Expired - Fee Related CN109009439B (zh) | 2018-06-07 | 2018-06-07 | 一种血管介入手术用精密操作装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109009439B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112336459B (zh) * | 2020-10-29 | 2021-08-31 | 北京唯迈医疗设备有限公司 | 一种用于介入造影手术仿生机器人 |
| CN113521496B (zh) * | 2021-07-20 | 2022-11-08 | 深圳市凯思特医疗科技股份有限公司 | 一种血管指引导管及其固定方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102462536A (zh) * | 2010-11-18 | 2012-05-23 | 无锡佑仁科技有限公司 | 一种用于血管介入手术机器人的导管推进操作装置 |
| CN103877663A (zh) * | 2012-12-20 | 2014-06-25 | 上海微创电生理医疗科技有限公司 | 用于导管的控弯装置和包括其的导管 |
| CN107822711A (zh) * | 2017-09-28 | 2018-03-23 | 济南大学 | 一种微创介入手术机器人的导丝介入装置 |
| CN108066881A (zh) * | 2018-01-29 | 2018-05-25 | 天津大学 | 血管介入导管、设备、接触力检测方法以及检测设备 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7591799B2 (en) * | 2004-06-14 | 2009-09-22 | Biosense Webster, Inc. | Steering mechanism for bi-directional catheter |
-
2018
- 2018-06-07 CN CN201810580252.4A patent/CN109009439B/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102462536A (zh) * | 2010-11-18 | 2012-05-23 | 无锡佑仁科技有限公司 | 一种用于血管介入手术机器人的导管推进操作装置 |
| CN103877663A (zh) * | 2012-12-20 | 2014-06-25 | 上海微创电生理医疗科技有限公司 | 用于导管的控弯装置和包括其的导管 |
| CN107822711A (zh) * | 2017-09-28 | 2018-03-23 | 济南大学 | 一种微创介入手术机器人的导丝介入装置 |
| CN108066881A (zh) * | 2018-01-29 | 2018-05-25 | 天津大学 | 血管介入导管、设备、接触力检测方法以及检测设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109009439A (zh) | 2018-12-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109009439B (zh) | 一种血管介入手术用精密操作装置 | |
| WO2018176458A1 (zh) | 血管介入手术机器人的导管推送控制方法及导管推送设备 | |
| WO2018176457A1 (zh) | 血管介入手术机器人的导管捻旋装置 | |
| CN108657877A (zh) | 一种可拆卸式移动电缆盘装置 | |
| CN108714921B (zh) | 一种医疗纱布加工设备 | |
| CN110604846A (zh) | 一种复合管材输血装置 | |
| CN112718900A (zh) | 一种镁基管材自动拉拔装置及方法 | |
| CN219279363U (zh) | 电池箱安装辅助设备 | |
| CN213851596U (zh) | 一种下肢康复训练支架 | |
| CN205442035U (zh) | 齿圈式全伺服回转卸袋机 | |
| CN108938262A (zh) | 一种内科用的便于调整型病床 | |
| CN211763364U (zh) | 一种气管软管热塑成型的牵拉装置 | |
| CN209864862U (zh) | 一种电动调节位置的医用天轨式输液架 | |
| CN211595608U (zh) | 一种微生物样本前处理系统划线机构 | |
| CN208808448U (zh) | 一种稳定紧凑型颏拖托升降结构 | |
| CN208429681U (zh) | 一种离型纸生产用裁切装置 | |
| CN221888387U (zh) | 一种医疗仪器壁式旋伸托架 | |
| CN216358660U (zh) | 一种便于拆卸的肝胆外科护理支架 | |
| CN215133575U (zh) | 一种用于精神科护理的喂药装置 | |
| CN215349011U (zh) | 一种内科护理用监护仪 | |
| CN215584710U (zh) | 一种急诊科用患者抢救手术防护调节床 | |
| CN220675992U (zh) | 一种高效的辅助检查台 | |
| CN215653225U (zh) | 一种具有调节麻醉流量功能的麻醉导管 | |
| CN219078602U (zh) | 医用一次性床单自动更换装置 | |
| CN220833462U (zh) | 一种外科重症护理仪器管路约束定位装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20210212 Termination date: 20210607 |