CN108454718B - Crawler-type passive self-adaptive robot - Google Patents
Crawler-type passive self-adaptive robot Download PDFInfo
- Publication number
- CN108454718B CN108454718B CN201810508770.5A CN201810508770A CN108454718B CN 108454718 B CN108454718 B CN 108454718B CN 201810508770 A CN201810508770 A CN 201810508770A CN 108454718 B CN108454718 B CN 108454718B
- Authority
- CN
- China
- Prior art keywords
- crawler
- vehicle body
- arm
- belt
- damping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/06—Endless track vehicles with tracks without ground wheels
- B62D55/065—Multi-track vehicles, i.e. more than two tracks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/104—Suspension devices for wheels, rollers, bogies or frames
- B62D55/108—Suspension devices for wheels, rollers, bogies or frames with mechanical springs, e.g. torsion bars
Abstract
The invention relates to a crawler-type passive self-adaptive robot which comprises a vehicle body module, two damping modules arranged at the front and rear of the vehicle body module, an information acquisition module arranged at the upper part of the vehicle body module and four crawler-type wheels arranged at two sides of the vehicle body module, wherein the two damping modules are arranged at the front and rear of the vehicle body module; two ends of one damping module are connected with two crawler wheels; the four crawler wheels have the same structure and are symmetrically arranged around the vehicle body module in a front-back and left-right manner; each crawler wheel comprises a crawler belt, a belt wheel structure and a belt transmission body, wherein the belt transmission body is connected with the vehicle body module on one hand and connected with the belt wheel structure on the other hand; the crawler belt is arranged on the outer surface of the belt wheel structure; the belt wheel structure comprises six transmission gears, two planetary supporting frames, four central shafts, two central gears and two planetary gears. Each crawler wheel of the robot moves through a motor drive and is connected through a damping module, so that the damping arm stretches and contracts to change, the swing rod swings left and right, and the robot can cross complex terrains.
Description
Technical Field
The invention relates to the technical field of robot moving platforms, in particular to a crawler-type passive self-adaptive robot.
Background
A wide variety of passive adaptive robots are now available, of the mechanism types: wheel, wheel leg, crawler, and track-wheel. In complex terrain and dangerous environments, such as special fields of deep ocean, nuclear power maintenance, disaster field search and rescue, military investigation, medical service, building industry and the like, robots replace people to complete tasks more and more, and compared with traditional robots, the robot has the advantages of requiring structural performance, reliability and technical advancement of the robots, and overcoming various difficulties in dangerous environments. In environments with complex rugged topography, the adaptive capacity of the crawler-type passive adaptive mobile platform is relatively strong, and the crawler-type passive adaptive mobile platform is widely adopted at present, but has some disadvantages.
The Chinese patent with application number 201710092030.3 discloses a Mars obstacle crossing detection robot, the walking structure of the robot adopts a triangular wheel structure, each corner of the triangle corresponds to one wheel, and each wheel is independently driven, the robot has the defects that the contact area between the wheel robot and the ground is small, the phenomenon of skidding easily occurs when climbing a slope, the control system is complex and difficult to operate due to the independent control of each wheel, the structure is complex, the robot is only suitable for moving on rough, steep and tiny uneven terrains, but the robot cannot be used for complex terrains. The patent application number 201510698094.9 discloses a mobile robot and a running method thereof, the walking structure adopts four triangular crawler belt pulleys, the planetary gear structure is adopted to drive the triangular crawler belt pulleys, when encountering obstacles, the triangular crawler belt pulleys can rotate, the impact force is larger, no damping measures are provided, and the service life of the structure cannot be guaranteed.
Disclosure of Invention
Aiming at the defects of the prior art, the invention aims to provide the crawler-type passive self-adaptive robot. Four triangular crawler wheels are adopted by the robot, and each crawler wheel is driven to move through a motor; the crawler wheels are connected through the damping modules of the suspension structure, the damping arms stretch and change according to the existence of acting force, the swing rods swing left and right, damping effect is achieved, complex terrain can be overcome, and stability and reliability of the structure are high; meanwhile, the information acquisition module is arranged on the robot, so that information can be acquired on site, and external information can be acquired through the sensor. The robot can stably move forward on uneven ground, can reduce vibration generated in the running process of the robot and has strong reliability.
The technical scheme adopted for solving the technical problems is as follows: the crawler-type passive self-adaptive robot comprises a vehicle body module, two damping modules arranged at the front and rear of the vehicle body module, an information acquisition module arranged at the upper part of the vehicle body module and four crawler-type wheels arranged at two sides of the vehicle body module; two ends of one damping module are connected with two crawler wheels; the four crawler wheels have the same structure and are symmetrically arranged around the vehicle body module in a front-back and left-right manner;
each crawler wheel comprises a crawler belt, a belt wheel structure and a belt transmission body, wherein the belt transmission body is connected with the vehicle body module on one hand and connected with the belt wheel structure on the other hand; the crawler belt is arranged on the outer surface of the belt wheel structure;
the belt wheel structure comprises six transmission gears, two planetary support frames, four central shafts, two central gears and two planetary gears, and the centers and three edge positions of the two planetary support frames are respectively connected with each other through the four central shafts; a central gear is arranged on the central shaft at the center and is close to the inner side of the planetary support frame; two ends of the central shaft positioned at the three edge positions, and the inner sides close to the planetary support frames are provided with a transmission gear; the two transmission gears on each central shaft are one group and three groups of transmission gears, a planetary gear meshed with each other is arranged between one group of transmission gears and two adjacent central gears, and each planetary gear is fixed on a planetary support frame at a corresponding position through a connecting shaft;
the belt transmission body comprises a transmission belt, a small belt pulley, a transmission rod and a large belt pulley, wherein a central gear, a corresponding planetary support frame and the transmission rod which are positioned at the center of the transmission belt are sequentially penetrated out of one end of the central shaft, which is close to the vehicle body module, and are fixedly connected with the large belt pulley; the other end of the transmission rod is connected with the axle center of the small belt wheel, the distance between the large belt wheel and the small belt wheel is fixed through the transmission rod, and the outer surfaces of the large belt wheel and the small belt wheel are connected through a transmission belt; the small belt wheel is simultaneously connected with a driving part in the vehicle body module; the large belt wheel drives the central gear to move through a central shaft positioned in the center;
each damping module comprises two large damping arms, two small damping arms and a rocker; the center of the rocker is provided with a supporting hole for fixing the rocker with the vehicle body module, the rockers on two sides of the supporting hole are respectively provided with a big arm hinge hole and a small arm hinge hole, the big arm hinge holes are positioned on the outer sides of the small arm hinge holes, and the two big arm hinge holes and the two small arm hinge holes take the supporting hole as symmetrical centers; one end of the small damping arm is fixed on the vehicle body module, and the other end of the small damping arm is connected with the rocker through a small arm hinge hole; one end of the large damping arm is connected with the rocker through a large arm hinge hole, and the other end of the large damping arm is connected with the middle part of the transmission rod of the adjacent crawler-type wheel;
the large damping arm comprises a large lower arm, a large upper arm, a spring and a piston rod, wherein the large upper arm is inserted into the upper part of the large lower arm, the piston rod is installed in the large upper arm, the lower end of the piston rod penetrates out of the large upper arm and goes deep into the large lower arm, the spring is installed in a space between the large upper arm and the large lower arm, and the large upper arm can slide up and down in the large lower arm; the small damping arm and the large damping arm have the same structure;
the vehicle body module comprises a vehicle body and four driving parts, each driving part drives one crawler-type wheel to act, and the driving part comprises a motor and a speed reducer; the motor shaft of the motor is connected with the speed reducer, the motor and the speed reducer are respectively arranged on an internal fixing plate of the vehicle body through corresponding supporting frames, and an output shaft of the speed reducer penetrates out of the vehicle body and is connected with a small belt pulley of the belt transmission body through a key; and a bearing is arranged at the contact part of the vehicle body and the output shaft of the speed reducer.
The speed reducer consists of a large gear, a small gear and an output shaft, wherein the small gear is fixed on a motor shaft of the motor and meshed with the large gear, the center of the large gear is connected with the output shaft, the large gear is connected with the output shaft through a bearing and a bearing end cover, and the large gear is fixed in the vehicle body through a corresponding support frame.
The information acquisition module comprises an industrial camera, an anemometer, an antenna and a wind direction sensor, wherein the industrial camera, the anemometer and the wind direction sensor are connected with the antenna, the antenna is connected with an external control computer in a wireless manner, and the robot is controlled through the computer; the information acquisition module is positioned on an upper cover antenna of the vehicle body and has the function of receiving and transmitting signals. The industrial camera can record the surrounding environment and the state, the anemometer and the wind direction sensor can record the wind direction and the wind direction, and the information is transmitted to the outside through the antenna.
Compared with the prior art, the invention has the beneficial effects that:
1. the invention adopts four triangle crawler wheels, which is characterized in that: the belt transmission body structure adopts a planetary gear transmission structure and is provided with three groups of transmission gears, wherein one group of transmission gears are driven, one planetary gear which is meshed with one group of transmission gears and two adjacent central gears is arranged between one group of transmission gears and the two adjacent central gears, and the other two groups of transmission gears are driven; the driven transmission gear rotates along with the rotation of the crawler belt. On a flat ground, one surface of the crawler wheel is contacted with the ground, and the crawler wheel moves forward flatly without overturning; under complex topography, according to the atress effect for crawler-type wheel takes place corresponding upset and passes over the obstacle, can adapt to the environment better.
2. The invention is characterized in that when walking on complex terrain, the suspension structure is characterized in that: the device consists of two large damping arms, two small damping arms and a rocker, wherein the damping arms are elastic and have damping effect, and a supporting hole for fixing the rocker with a vehicle body module is formed in the center of the rocker; when encountering obstacles, the telescopic change of the large damping arm and the small damping arm changes according to the magnitude and the direction of the force, so that the rocker swings up and down, and the crawler wheels at the two ends move in a high-low mode, and the balance of the robot is adjusted. Stability is improved relative to existing tracked robots.
3. When encountering different left and right sides of an obstacle, the invention is not easy to turn over, and is characterized in that: according to the stress effect, the gravity center of the crawler wheels is changed, the rocker swings up and down, the damping arm stretches and contracts to change, the balance of the vehicle body is adjusted, the inclination of the vehicle body is low, and side turning is not easy to occur.
Drawings
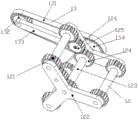
Fig. 1 is a schematic overall structure of one embodiment of the crawler-type passive adaptive robot of the present invention.
Fig. 2 is a schematic diagram of the connection of the belt wheel structure 12 and the belt transmission body 13 of the crawler-type passive adaptive robot of the present invention.
Fig. 3 is a schematic perspective view of a shock absorbing module in the crawler-type passive adaptive robot according to the present invention.
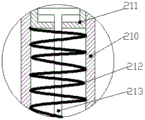
Fig. 4 is a schematic view of the internal structure of the large shock absorbing arm 21 in the crawler-type passive adaptive robot of the present invention.
Fig. 5 is a schematic view showing an internal top view structure of the body module 3 in the crawler-type passive adaptive robot of the present invention.
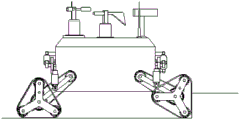
Fig. 6 is a schematic view of the motion of the tracked passive adaptive robot of the present invention on a flat ground.
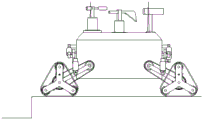
FIG. 7 is a schematic diagram of the wheel overturning motion of the tracked passive adaptive robot of the present invention when traversing a step.
FIG. 8 is a schematic elevation view of the movement of a front tracked wheel of the tracked passive adaptive robot of the present invention across a step.
Fig. 9 is a schematic perspective view of the track-type passive adaptive robot of the present invention with the front track-type wheels moving over steps.
FIG. 10 is a schematic view of the movement of the front tracked wheel of the tracked passive adaptive robot of the present invention over a step, and the rear tracked wheel has not yet passed over the step.
FIG. 11 is a schematic view of the movement of the tracked passive adaptive robot of the present invention when both the front and rear tracked wheels are over a step.
Fig. 12 is a schematic view of a front view structure of the crawler-type passive adaptive robot moving on uneven ground.
Fig. 13 is a schematic perspective view of a crawler-type passive adaptive robot moving on an uneven ground.
Wherein: the device comprises a 1-crawler wheel, a 2-damping module, a 3-vehicle body module, a 4-information acquisition module, a 11-crawler, a 12-belt wheel structure, a 13-belt transmission body, a 131-belt, a 132-small belt wheel, a 133-transmission rod, a 134-large belt wheel, a 121-transmission gear, a 122-planetary support frame, a 123-central shaft, a 124-central gear, a 125-planetary gear, a 126-connecting shaft, a 21-large damping arm, a 22-small damping arm, a 23-rocker, a 210-large lower arm, a 211-large upper arm, a 212-spring, a 213-piston rod, a 230-supporting hole, a 231-small arm hinge hole, a 232-large arm hinge hole, a 301-motor, a 302-reducer, a 303-small gear, a 304-large gear, a 305-output shaft, a 401-industrial camera, a 402-anemometer, a 403-antenna and a 404-wind direction sensor.
Detailed Description
The technical scheme of the present invention is further specifically described below with reference to the examples and the accompanying drawings, but the scope of the present invention is not limited thereto.
The crawler-type passive self-adaptive robot (referred to as a robot for short, see fig. 1-5) comprises a vehicle body module 3, two damping modules 2 arranged at the front and the rear of the vehicle body module, an information acquisition module 4 arranged at the upper part of the vehicle body module and four crawler-type wheels 1 arranged at the two sides of the vehicle body module; two ends of one damping module are connected with two crawler wheels; the four crawler wheels have the same structure and are symmetrically arranged around the vehicle body module in a front-back and left-right manner;
each crawler wheel 1 comprises a crawler belt 11, a pulley structure 12 and a belt transmission body 13, said belt transmission body 13 being connected on the one hand to the vehicle body module and on the other hand to the pulley structure; a crawler belt 11 is arranged on the outer surface of the belt wheel structure;
the pulley structure 12 comprises six transmission gears 121, two planetary support frames 122, four central shafts 123, two central gears 124 and two planetary gears 125, wherein the centers and three edge positions of the two planetary support frames 122 are respectively connected with each other through the four central shafts; a central gear 124 is arranged on the central shaft at the center and is close to the inner side of the planetary support frame; two ends of the central shaft positioned at the three edge positions, and a transmission gear 121 is arranged near the inner side of the planetary support frame; the two transmission gears on each central shaft are a group of three groups of transmission gears, a planetary gear 125 which is meshed with one transmission gear and the two adjacent central gears is arranged between one group of transmission gears and the two adjacent central gears, and each planetary gear 125 is fixed on a planetary support frame at a corresponding position through a connecting shaft 126;
the belt transmission body 13 comprises a transmission belt 131, a small belt pulley 132, a transmission rod 133 and a large belt pulley 134, wherein a central gear, a corresponding planetary support frame and the transmission rod 133 sequentially penetrate through one end, close to the vehicle body module, of a central shaft positioned in the center, and are fixedly connected with the large belt pulley 134; the other end of the transmission rod is connected with the axle center of the small belt wheel, the distance between the large belt wheel and the small belt wheel is fixed through the transmission rod, and the outer surfaces of the large belt wheel and the small belt wheel are connected through a transmission belt and transmit power; the small belt wheel is simultaneously connected with a driving part in the vehicle body module; the large belt wheel 134 drives the central gear 124 to move through a central shaft positioned at the center;
each shock absorbing module 2 comprises two large shock absorbing arms 21, two small shock absorbing arms 22 and one rocker 23; the center of the rocker 23 is provided with a supporting hole 230 for fixing with a vehicle body module, the rockers on two sides of the supporting hole are respectively provided with a big arm hinge hole 232 and a small arm hinge hole 231, the big arm hinge holes are positioned on the outer sides of the small arm hinge holes, and the two big arm hinge holes and the two small arm hinge holes take the supporting hole as symmetrical centers; one end of the small damping arm 22 is fixed on the vehicle body module, and the other end is connected with the rocker through a small arm hinge hole; one end of the large damping arm 22 is connected with the rocker through a large arm hinge hole, and the other end of the large damping arm is connected with the middle part of the transmission rod 133 of the adjacent crawler-type wheel;
the bearing is arranged on the supporting hole 230, so that the passive rotation can be realized on uneven ground, when an obstacle is met, the telescopic change action of the large damping arm 21 and the small damping arm 22 is changed according to the magnitude and the direction of the force, so that the rocker 23 swings up and down, the crawler wheels 1 at the two ends are enabled to move up and down, the vehicle body module 3 can be kept in a state of being approximately parallel to the ground and in a state of being flat, and the mobile robot is prevented from tilting to turn over and move forward steadily;
the large damping arm 21 comprises a large lower arm 210, a large upper arm 211, a spring 212 and a piston rod 213, wherein the large upper arm 211 is inserted into the upper part of the large lower arm 210, the piston rod 213 is installed in the large upper arm, the lower end of the piston rod penetrates out of the large upper arm and goes deep into the large lower arm, the spring is installed in the space between the large upper arm and the large lower arm, and the large upper arm 211 can slide up and down in the large lower arm 210, so that the effects of energy storage and damping are achieved; the structures of the large damping arm and the small damping arm are the same;
the vehicle body module 3 comprises a vehicle body and four driving parts, each driving part drives one crawler wheel 1 to act, and each driving part comprises a motor 301 and a speed reducer 302; the motor shaft of the motor 301 is connected with the speed reducer 302, the motor and the speed reducer are respectively arranged on an internal fixing plate of the vehicle body through corresponding supporting frames, and an output shaft of the speed reducer 302 penetrates out of the vehicle body and is connected with a small belt pulley 132 with a transmission body through a key; bearings are mounted at the contact points of the vehicle body and the output shaft of the speed reducer 302.
The reducer 302 is composed of a pinion 303, a large gear 304 and an output shaft 305, the pinion 303 is fixed on a motor shaft of the motor and is meshed with the large gear, the center of the large gear is connected with the output shaft, the large gear is connected with the output shaft through a bearing and a bearing end cover, and the reducer has good lubrication effect, so that the output shaft 305 is driven by the motor 301 to normally operate, and the large gear is fixed in a vehicle body through a corresponding supporting frame.
The information acquisition module 4 comprises an industrial camera 401, an anemometer 402, an antenna 403 and a wind direction sensor 404, wherein the industrial camera 401, the anemometer 402 and the wind direction sensor 404 are connected with the antenna 403, the antenna 403 is connected with an external control computer in a wireless way, and the robot is controlled through the computer; the information acquisition module 4 is located on the upper cover of the vehicle body module, and the antenna 403 has the function of receiving and transmitting signals. The industrial camera 401 can record the surrounding environment and state, the anemometer 402 and the wind direction sensor 404 can record the wind direction and the wind direction, and information is transmitted to the outside through the antenna 403.
The robot disclosed by the invention can be suitable for all complex ground with the height of the obstacle not exceeding the gravity center of the transmission gear at the highest position, and can span the obstacle with higher height and stronger obstacle crossing capability.
The invention relates to a working principle and a working process of a crawler-type passive self-adaptive robot moving under complex terrain and severe environments, wherein the working principle comprises the following steps: the four crawler wheels 1 can enhance the driving strength of the robot and the obstacle crossing capability under the driving action of the four motors 301 respectively. When the robot moves forward, the turning of the robot is realized by controlling the difference of the speeds of the two front crawler wheels 1; if the speeds of the two front crawler wheels 1 are controlled to be the same, the robot can do linear motion; if the forward and reverse rotation of the motor 301 is changed, the robot can realize forward and reverse. The motor 301 drives the sun gear 124 to rotate through the speed reducer 302 and the belt transmission body 13, the sun gear 124 meshes with the planetary gears 125, the planetary gears 125 mesh with the pair of transmission gears 121, and the remaining two pairs of transmission gears 121 are in a driven state. When the robot walks on a flat ground, the crawler belt 11 rotates along with the rotation of the pair of driving transmission gears 121, and the other two pairs of driven transmission gears 121 also rotate along with the rotation, so that one surface of the crawler belt is always in contact with the ground under the action of friction force, the crawler wheels cannot overturn, the damage of the crawler wheels is reduced, and the robot is ensured to move stably.
Referring to fig. 6 to 11, when the robot climbs a step obstacle, the height of the obstacle is higher than the center of gravity of the lowest transmission gear 121 and lower than the center of gravity of the highest transmission gear 121, the crawler is simultaneously contacted with one side in the horizontal direction and one side in the vertical direction due to the friction force and moment (fig. 7), the crawler is overturned, the front crawler wheels 1 are made to cross the step, the shock absorbing module 2 is under the telescopic change action of the large shock absorbing arm 21 and the small shock absorbing arm 22 according to the stress and direction of the crawler, the rocker 23 swings up and down, the shock absorbing action is achieved, and the balance of the robot is adjusted (fig. 8 to 10). The obstacle surmounting method of the crawler wheels 1 at the front and rear under the driving of the motor 301 is the same, and the robot can smoothly surmount the steps (fig. 11).
Referring to fig. 12-13, when the ground is uneven, the suspension structure can adjust the stable state of the whole robot, since the crawler wheels 1 on both sides of the vehicle body are not on a horizontal line, the robot vibrates, the shock absorbing module 2 acts, the telescopic variation of the large shock absorbing arm 21 and the small shock absorbing arm 22 acts according to the magnitude and direction of force, so that the rocker 23 swings up and down, the vehicle body module 3 can keep approximately parallel to the ground or form a small angle, the robot is prevented from tilting to turn over, and the vehicle body module moves forward steadily. When the height of the ground surface irregularities is lower than the center of gravity of the lowest transmission gear 121, the crawler wheel 1 moves forward in contact with the ground surface with a bottom plane of the triangle, and the crawler belt 11 of the crawler wheel 1 takes on a shape having an arc, so that the crawler wheel has a cushioning effect when passing through a small obstacle (fig. 12 to 13). The robot has stronger obstacle crossing capability and prolonged service life.
In the invention, the front and back directions are defined by the direction of the robot when the robot walks, namely the direction of the robot is the front, and the opposite direction is the back.
The examples described herein are intended to be illustrative rather than limiting, and therefore the invention includes, but is not limited to, those examples described in the detailed description, as long as they are other embodiments that a person skilled in the art would achieve according to the technical solution of the invention, and are within the scope of the invention.
Claims (4)
1. A crawler-type passive self-adaptive robot comprises a vehicle body module, an information acquisition module arranged at the upper part of the vehicle body module and four crawler-type wheels arranged at two sides of the vehicle body module; the robot is characterized by further comprising two damping modules arranged at the front and rear of the vehicle body module, wherein two ends of one damping module are connected with two crawler wheels; the four crawler wheels have the same structure and are symmetrically arranged around the vehicle body module in a front-back and left-right manner;
each crawler wheel comprises a crawler belt, a belt wheel structure and a belt transmission body, wherein the belt transmission body is connected with the vehicle body module on one hand and connected with the belt wheel structure on the other hand; the crawler belt is arranged on the outer surface of the belt wheel structure;
the belt wheel structure comprises six transmission gears, two planetary support frames, four central shafts, two central gears and two planetary gears, and the centers and three edge positions of the two planetary support frames are respectively connected with each other through the four central shafts; a central gear is arranged on the central shaft at the center and is close to the inner side of the planetary support frame; two ends of the central shaft positioned at the three edge positions, and the inner sides close to the planetary support frames are provided with a transmission gear; the two transmission gears on each central shaft are one group and three groups of transmission gears, a planetary gear meshed with each other is arranged between one group of transmission gears and two adjacent central gears, and each planetary gear is fixed on a planetary support frame at a corresponding position through a connecting shaft;
the belt transmission body comprises a transmission belt, a small belt pulley, a transmission rod and a large belt pulley, wherein a central gear, a corresponding planetary support frame and the transmission rod which are positioned at the center of the transmission belt are sequentially penetrated out of one end of the central shaft, which is close to the vehicle body module, and are fixedly connected with the large belt pulley; the other end of the transmission rod is connected with the axle center of the small belt wheel, the distance between the large belt wheel and the small belt wheel is fixed through the transmission rod, and the outer surfaces of the large belt wheel and the small belt wheel are connected through a transmission belt; the small belt wheel is simultaneously connected with a driving part in the vehicle body module; the large belt wheel drives the central gear to move through a central shaft positioned in the center;
each damping module comprises two large damping arms, two small damping arms and a rocker; the center of the rocker is provided with a supporting hole for fixing the rocker with the vehicle body module, the rockers on two sides of the supporting hole are respectively provided with a big arm hinge hole and a small arm hinge hole, the big arm hinge holes are positioned on the outer sides of the small arm hinge holes, and the two big arm hinge holes and the two small arm hinge holes take the supporting hole as symmetrical centers; one end of the small damping arm is fixed on the vehicle body module, and the other end of the small damping arm is connected with the rocker through a small arm hinge hole; one end of the large damping arm is connected with the rocker through a large arm hinge hole, and the other end of the large damping arm is connected with the middle part of the transmission rod of the adjacent crawler-type wheel;
the large damping arm comprises a large lower arm, a large upper arm, a spring and a piston rod, wherein the large upper arm is inserted into the upper part of the large lower arm, the piston rod is installed in the large upper arm, the lower end of the piston rod penetrates out of the large upper arm and goes deep into the large lower arm, the spring is installed in a space between the large upper arm and the large lower arm, and the large upper arm can slide up and down in the large lower arm; the small damping arm and the large damping arm have the same structure;
when the robot walks on a flat ground, the crawler belt (11) rotates along with the rotation of the pair of driving transmission gears (121), and the other two pairs of driven transmission gears (121) also rotate, so that one surface of the crawler belt is always contacted with the ground under the action of friction force, the crawler wheels cannot overturn, the damage of the crawler wheels is reduced, and the robot is ensured to move stably;
when the robot climbs a step obstacle, the height of the obstacle is higher than the gravity center of the lowest transmission gear (121) and lower than the gravity center of the highest transmission gear (121), the crawler is simultaneously contacted with one surface in the horizontal direction and one surface in the vertical direction under the action of friction force and moment, the crawler turns over, the front crawler wheels (1) cross the step, and the damping module (2) plays a role in the telescopic change of the large damping arm (21) and the small damping arm (22) according to the stress size and the direction of the crawler, so that the rocker (23) swings up and down, has the damping effect and adjusts the balance of the robot;
when the ground is uneven, the suspension structure can adjust the stable state of the whole robot, because the crawler wheels (1) on two sides of the vehicle body are not on the same horizontal line, the robot vibrates, the damping module (2) acts, the telescopic change function of the large damping arm (21) and the small damping arm (22) changes according to the magnitude and the direction of force, the rocker (23) swings up and down, the vehicle body module 3 can keep approximately parallel to the ground or form a small angle, the robot is prevented from tilting to turn over, the crawler wheels (1) smoothly move forwards, the ground uneven height is lower than the gravity center of the lowest transmission gear (121), the crawler wheels (1) move forwards in contact with the ground in a bottom plane of a triangle, and the buffer function is achieved when the vehicle passes small obstacles because the shape of the crawler wheels (11) is provided with radian.
2. The tracked passive adaptive robot of claim 1, wherein the body module comprises a body and four drive sections, each drive section driving one tracked wheel to act, the drive section comprising a motor, a decelerator; the motor shaft of the motor is connected with the speed reducer, the motor and the speed reducer are respectively arranged on an internal fixing plate of the vehicle body through corresponding supporting frames, and an output shaft of the speed reducer penetrates out of the vehicle body and is connected with a small belt pulley of the belt transmission body through a key; and a bearing is arranged at the contact part of the vehicle body and the output shaft of the speed reducer.
3. The crawler-type passive self-adaptive robot according to claim 2, wherein the speed reducer is composed of a large gear, a small gear and an output shaft, the small gear is fixed on a motor shaft of the motor and meshed with the large gear, the center of the large gear is connected with the output shaft, the large gear is connected with the output shaft through a bearing and a bearing end cover, and the large gear is fixed in the vehicle body through a corresponding supporting frame.
4. The tracked passive adaptive robot of claim 1, wherein the information acquisition module comprises an industrial camera, an anemometer, an antenna and a wind direction sensor, wherein the industrial camera, the anemometer and the wind direction sensor are all connected with the antenna, and the antenna is connected with an external control computer through wireless.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810508770.5A CN108454718B (en) | 2018-05-24 | 2018-05-24 | Crawler-type passive self-adaptive robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810508770.5A CN108454718B (en) | 2018-05-24 | 2018-05-24 | Crawler-type passive self-adaptive robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108454718A CN108454718A (en) | 2018-08-28 |
| CN108454718B true CN108454718B (en) | 2023-06-23 |
Family
ID=63214666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810508770.5A Active CN108454718B (en) | 2018-05-24 | 2018-05-24 | Crawler-type passive self-adaptive robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108454718B (en) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109281982A (en) * | 2018-11-01 | 2019-01-29 | 苏州赛亚智能技术有限公司 | A kind of exploration robot damping |
| CN110215165A (en) * | 2019-06-24 | 2019-09-10 | 广西科技大学 | It is a kind of to cross crawler belt clean robot automatically |
| CN111872915A (en) * | 2020-07-14 | 2020-11-03 | 重庆大学 | Obstacle-crossing exploration robot based on oscillating crawler wheel |
| CN112918582B (en) * | 2021-03-02 | 2022-04-15 | 西安航空学院 | Deformable fire-fighting emergency robot |
| CN113086035B (en) * | 2021-04-14 | 2021-11-16 | 北京林业大学 | Anti-tipping walking device for forest fire engine |
| CN113338975B (en) * | 2021-06-07 | 2023-01-03 | 燕山大学 | Impact type tunneling machine capable of turning |
| CN113926105B (en) * | 2021-10-18 | 2022-04-26 | 特斯联科技集团有限公司 | Fire-fighting robot for forest grassland |
| CN113829319A (en) * | 2021-11-02 | 2021-12-24 | 安徽海马特救援科技有限公司 | Modular robot |
| CN114506390B (en) * | 2021-12-28 | 2023-08-11 | 高维智控机器人科技(苏州)有限公司 | Four-wheel carrying crawler type movable chassis structure |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10181330A (en) * | 1996-12-26 | 1998-07-07 | Takenaka Komuten Co Ltd | Vehicular suspension device |
| CN201872563U (en) * | 2010-12-08 | 2011-06-22 | 陕西重型汽车有限公司 | Lorry double-rear axle balancing suspension frame structure |
| CN201998761U (en) * | 2011-01-07 | 2011-10-05 | 唐承慧 | Front wheel shock absorption device |
| CN103273817A (en) * | 2013-05-10 | 2013-09-04 | 江苏大学 | Energy storage suspension with left suspension and right suspension being communicated |
| CN203419192U (en) * | 2013-08-31 | 2014-02-05 | 苏润本 | Multifunctional crawler-type obstacle crossing trolley |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5240683B2 (en) * | 2007-06-08 | 2013-07-17 | 独立行政法人 宇宙航空研究開発機構 | Traveling mechanism with rocker crawler |
| CN102700644B (en) * | 2012-06-08 | 2014-10-15 | 上海交通大学 | Wheel and foot combined all-terrain robot running device |
| SE539473C2 (en) * | 2013-05-08 | 2017-09-26 | BAE Systems Hägglunds AB | Suspension device for tracked vehicles |
| CN105129110B (en) * | 2015-08-26 | 2017-04-05 | 重庆大学 | A kind of planetary vehicle |
| CN105270495A (en) * | 2015-10-23 | 2016-01-27 | 河北工业大学 | Mobile robot and operation method thereof |
| CN106741263A (en) * | 2016-12-23 | 2017-05-31 | 哈尔滨工程大学 | Four crawler belt self adaptation road conditions gravity-center adjustable mechanisms |
| CN207328636U (en) * | 2017-10-12 | 2018-05-08 | 山东科技大学 | A kind of novel crawler-type sniffing robot |
| CN107953937B (en) * | 2017-12-01 | 2020-02-11 | 北京履坦科技有限公司 | Improved structure of walking system of walking combined type mobile robot |
-
2018
- 2018-05-24 CN CN201810508770.5A patent/CN108454718B/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10181330A (en) * | 1996-12-26 | 1998-07-07 | Takenaka Komuten Co Ltd | Vehicular suspension device |
| CN201872563U (en) * | 2010-12-08 | 2011-06-22 | 陕西重型汽车有限公司 | Lorry double-rear axle balancing suspension frame structure |
| CN201998761U (en) * | 2011-01-07 | 2011-10-05 | 唐承慧 | Front wheel shock absorption device |
| CN103273817A (en) * | 2013-05-10 | 2013-09-04 | 江苏大学 | Energy storage suspension with left suspension and right suspension being communicated |
| CN203419192U (en) * | 2013-08-31 | 2014-02-05 | 苏润本 | Multifunctional crawler-type obstacle crossing trolley |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108454718A (en) | 2018-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108454718B (en) | Crawler-type passive self-adaptive robot | |
| CN107953937B (en) | Improved structure of walking system of walking combined type mobile robot | |
| CN110481657B (en) | Special robot with complex terrain self-adaption function and movement operation method thereof | |
| CN107128375B (en) | Mobile chassis for wheel-track switching | |
| CN111846000A (en) | Wheel leg robot leg structure and mobile robot | |
| CN107140052A (en) | A kind of wheel leg type Hexapod Robot with suspension | |
| CN107521573A (en) | A kind of damping crawler-type unmanned mobile platform | |
| CN108673469B (en) | Caterpillar band deformable robot moving platform for dangerous disaster site environment | |
| CN214875226U (en) | Moving device of robot and robot | |
| CN112298395B (en) | Six-wheel bionic chassis | |
| CN201140734Y (en) | Mobile robot with combined step-wheel-footstep | |
| CN203172749U (en) | Moving base of crawler belt robot | |
| CN101157372A (en) | A step wheel combined mobile robot | |
| CN106184438B (en) | The damping running part that lead screw driving deforms and the firefighting movable platform with it | |
| CN110341818B (en) | Mobile robot and crawler-type chassis thereof | |
| CN106184434A (en) | Wheel is carried out conversion mobile chassis and has its fire-fighting sniffing robot | |
| CN104354777A (en) | Rocker arm type four-bar linkage suspension system for crawler vehicle | |
| CN113276976B (en) | Planet wheel type obstacle crossing robot | |
| CN105216899A (en) | Barrier-surpassing robot | |
| CN111017020A (en) | Moving platform cross-country chassis and mobile robot | |
| CN113173216A (en) | Moving device of robot and robot | |
| CN105059408A (en) | Crawler-type mobile platform passively adaptive to terrain and robot having same | |
| JP2012228996A (en) | Four-wheeled traveling vehicle | |
| CN112373594A (en) | Wheel-leg hybrid drive type mining metamorphic robot | |
| CN210258605U (en) | High-performance self-adaptive crawler chassis device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |