CN107443173B - 一种具有可重构特性的大行程、高刚度串并混联机床 - Google Patents
一种具有可重构特性的大行程、高刚度串并混联机床 Download PDFInfo
- Publication number
- CN107443173B CN107443173B CN201710726499.8A CN201710726499A CN107443173B CN 107443173 B CN107443173 B CN 107443173B CN 201710726499 A CN201710726499 A CN 201710726499A CN 107443173 B CN107443173 B CN 107443173B
- Authority
- CN
- China
- Prior art keywords
- revolute pair
- pair
- adjusting device
- branches
- driving unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q39/00—Metal-working machines incorporating a plurality of sub-assemblies, each capable of performing a metal-working operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/22—Feeding members carrying tools or work
- B23Q5/34—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission
- B23Q5/38—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission feeding continuously
- B23Q5/40—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission feeding continuously by feed shaft, e.g. lead screw
Abstract
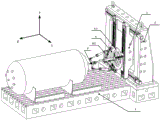
本发明涉及一种具有可重构特性的大行程、高刚度串并混联机床,包括固定工作台、X向移动单元、Y向移动单元、举升调节装置、三条结构相同的驱动支链、动平台以及主轴头。其中固定工作台上装有专用夹具,X向移动单元和Y向移动单元由机架和伺服驱动单元组成。其中举升调整装置包括三个结构相同的被动分支和中间主动分支,能够调节并联机构的结构倾角,使得并联机构具有可重构特性。三条结构相同的驱动支链连接举升调节装置和动平台,该空间闭环并联机构能够实现一维移动和两维转动。本发明具有结构对称性好、刚度高、工作空间大、姿态能力强、动态性能好等优点,同时兼顾串联机床和并联机床的优点,可用于大型异构件复杂曲面的五轴加工。
Description
技术领域
本发明属于数控机床领域,具体涉及一种能够满足航空航天领域大型异型结构复杂曲面自由加工的新型具有可重构特性的串并混联机床。
背景技术
针对航空航天领域大型异构复杂空间自由曲面的等厚加工问题,目前仍采用手工铣削的方式,这样势必存在成本高,周期长,加工质量依赖于工人技术的熟练程度,致使难以达到精度的加工要求;传统的三坐标串联机床具有灵活性好,工作空间大等优点,虽在工业中得到广泛的应用,但终究因其机械结构为串联开链,使其执行器输出端容易产生误差累积、精度差,整体刚度也不高,而且任一关节的动作都会带动其它关节的运动,考虑其各级电机的负载,使得输出端的动态响应速度很慢,难以满足高端智能制造装备领域所要求的理想效果;传统的五轴联动机床,在三坐标串联机床的基础上串接两自由度的摆头或配合两自由度旋转工作台加工零件,但其适合于加工结构尺寸小的零件,无法满足大型异型构件的加工。在此背景下,鉴于以并联机构作为主机构的并联机床恰恰具有精度高,累计误差小,刚度大、易于实现高速加工以及具有较好的动态响应特性等优点,在一定程度上克服了传统机床的不足,利用串联机构和并联机构的互补关系,使得五自由度混联机床成为空间复杂异型曲面加工的重要发展趋势。
鉴于航空航天空间复杂异型结构件的整体尺寸较大,选择刚度高、姿态能力强的少自由度并联机构作为串并混联机床的主机构,辅以实现X-Y轴的大行程直线导轨来构成五坐标联动加工的一种混联机床来完成空间复杂多变的零部件的任务作业需求。因此,为了高效率、高精度的完成曲面的加工,获得高刚度、大工作空间、高姿态能力的新型少自由度并联机构具有十分重要的意义。冗余驱动并联机构作为一种特殊的少自由度并联机构,能够提高机床的运动学性能和动力学性能,尤其是刚度特性和动态响应特性。因此,发明一种具有可重构特性的冗余驱动混联机床为大型航空航天异型结构件高速铣削加工提供较好的解决方案。
发明内容
为了满足航空航天领域大型异构空间复杂自由曲面的五轴联动数控加工的任务需求,本发明提出了一种具有可重构特性的冗余驱动串并混联机床,该混联机床具有X向、Y向大的移动行程,Z向运动由举升机构和冗余驱动并联机构两级叠加,具有较大的Z向行程,而且该冗余驱动并联机构具有双重驱动的特性,具有较强的姿态能力,能够通过举升调节机构的运动,不断改变并联机构的结构倾角,使得并联机构具有可重构特性。冗余驱动特性的引入,使得该机床具有较好的运动学性能和动力学性能,能够满足航空航天领域中大型空间复杂异型曲面自由加工所需的精度要求。
本发明提出的一种具有可重构特性的大行程、高刚度串并混联机床,其包括固定工作台、X向移动单元组件、Y向移动单元组件、举升调节装置、三条相同的驱动支链、动平台以及主轴头,其特征在于:所述固定工作台上装有专用夹具,在固定平台侧面设有X向“回”型移动单元组件,在“回”型移动单元组件的机架上安装两个相同的滚珠丝杠驱动单元组件,将滚珠丝杠驱动单元组件的滑块和螺母连接块与Y向“回”型移动单元组件相连接,在Y向“回”型移动单元组件的机架上双侧装有滚珠丝杠驱动单元组件,将其上的螺母连接块和滑块与连接板相连接,连接板的另一端与举升调节装置的固定平台相连接,三条结构相同的驱动分支一端连接举升装置,另一端连接动平台,在动平台末端安装主轴头;
所述举升调节装置包括三个结构相同的RPR被动分支和中间恰约束主动P分支,其中RPR被动分支包括第一转动副R、滑动导杆、第二转动副R,所述装置的固定平台通过第一转动副R与RPR被动分支中的被动P副的连接杆相连,P副的另一端与第二转动副R相连,第一转动副R的轴线与第二转动副R的轴线相互平行,且与固定平台中心与第一转动副R的铰点连线相垂直,三条结构相同的RPR分支呈轴对称分布,中间恰约束主动P分支通过伺服电机单元连接该装置的固定平台和动平台;
所述三条结构相同的驱动分支为PRPS支链,主要包括伺服驱动单元1、转动副、伺服驱动单元2、复合球铰;其中伺服驱动单元1包括伺服电机、电机支座、联轴器、两个轴承、两个轴承支座、滚珠丝杠、滚珠丝杠螺母副、两个导轨、两个直线滑块,其中连接杆上方设有相互平行的两个导轨,每个导轨上均设有直线滑块,滑块位于连接块的底部,电机位于连接杆的末端,电机固定在电机支座上。伸缩支链下端通过转动副R与丝杠螺母副连接块相连接,上端与复合球铰相连,伺服驱动单元2镶嵌于伸缩支链的内部,其中伺服驱动单元2包括伺服电机、联轴器、一个轴承、一个轴承支座、滚珠丝杠、滚珠丝杠螺母副、伸缩杆、连接块1、套筒、连接块2。复合球铰由三个两两相交的回转轴组成,复合铰链的一端与伸缩杆相连,另一端与动平台相连接。所述PRPS支链中的转动副轴线与伺服驱动单元1的运动方向垂直,并与伺服驱动单元2的移动方向相垂直,且所述支链均匀分布在举升调节装置的连接杆上。
本发明提出的具有可重构特性的大行程、高刚度串并混联机床,其特征在于:举升调节装置的RPR分支中,第一转动副轴线R与第二转动副轴线R平行,且第一转动副轴线与固定平台中心与第一转动副R铰点的连线相垂直,第一转动副R与第二转动副R之间连接的移动副P是被动的,中间恰约束支链P分支中的驱动是主动的,所述三条结构相同的RPR分支对称均匀分布,该举升调节装置的机构组合为3RPR+P型运动支链。
本发明提出的具有可重构特性的大行程、高刚度串并混联机床,其特征在于:连接举升调节装置与动平台之间的PRPS支链中的两个移动副为双重驱动,且转动副的轴线方向与两驱动副移动方向互相垂直。
本发明提出的具有可重构特性的大行程、高刚度串并混联机床有如下优点:(1)结构简单、对称性好,易于加工装配,成本较低,能够实现模块化生产;(2)具有可重构特性,举升调节机构的运动能够改变并联机构的结构倾角,使得并联机构具有可重构特性;(3)工作空间大,串行X-Y能够实现大行程的移动,Z向冗余驱动并联机构和举升调节机构的运动叠加,能够实现较大的Z向行程;(4)姿态能力强,冗余驱动并联机构能够增加动平台的移动行程,使得并联机构动平台末端的主轴头具有较高的姿态调节能力;(5)刚度高,冗余驱动技术能够有效提高机床的运动学性能和动力学性能,尤其是刚度特性和精度特性;(6)速度响应快,动态性能好,能够实现高速加工。这些优点使得该机床易于控制,加工精度高,能够满足航空航天领域大型复杂异型结构件的自由曲面加工任务需求。
附图说明
图1是本发明的具有可重构特性的串并混联机床的整体结构示意图
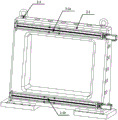
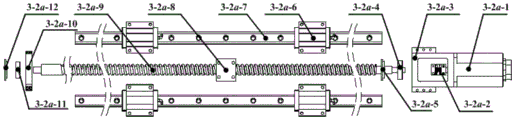
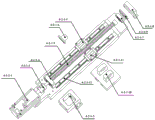
图2是本发明的混联机床的X向移动单元的结构示意图
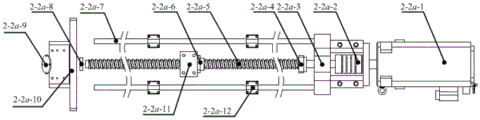
图3是本发明的混联机床的X向伺服驱动单元的断开结构示意图
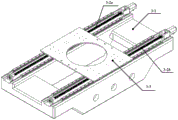
图4是本发明的混联机床的Y向移动单元的结构示意图
图5是本发明的混联机床的Y向伺服驱动单元的断开结构示意图
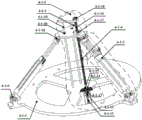
图6是本发明的混联机床的并联机构主体的结构示意图
图7是本发明的举升调节装置的结构示意图
图8是本发明的举升调节装置的单分支RPR的结构示意图
图9是本发明的单支链驱动分支PRPS的结构示意图
图10是本发明的驱动分支PRPS中第一驱动单元的结构示意图
图11是本发明的驱动分支PRPS中第二驱动单元的结构示意图
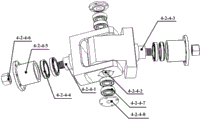
图12是本发明的驱动分支PRPS中复合铰链的爆炸示意图
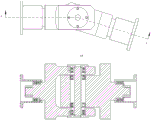
图13是本发明的驱动分支PRPS中复合铰链的剖视图
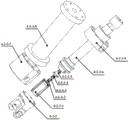
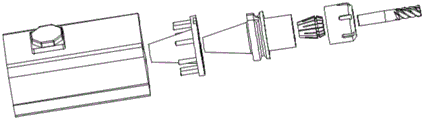
图14是本发明的主轴头的爆炸示意图
图1中:1、固定工作台,2、X向移动单元,3、Y向移动单元,4、并联机构组件,4-1、举升调节装置,4-2、冗余驱动并联机构PRPS支链,5、主轴头。
图2中:2-1、X向移动单元机架,2-2a、伺服驱动单元组件a,2-2b、伺服驱动单元组件b,2-3、吊耳。
图3中:2-2a-1、伺服电机,2-2a-2、联轴器,2-2a-3、伺服电机机座,2-2a-4、带轴承支座,2-2a-5、滚珠丝杠,2-2a-6、滚珠丝杠螺母副,2-2a-7、光轴导轨,2-2a-8、轴承,2-2a-9、轴承端盖,2-2a-10、轴承支座,2-2a-11、连接块,2-2a-12、滚珠箱式直线滑块。
图4中:3-1、Y向移动单元机架,3-2a、伺服驱动单元组件a,3-2b、伺服驱动单元组件b,3-3、连接板。
图5中:3-2a-1、伺服电机,3-2a-2、联轴器,3-2a-3、伺服电机机座,3-2a-4、带轴承支座,3-2a-5、轴承端盖,3-2a-6、滑块,3-2a-7、直线导轨,3-2a-8、滚珠丝杠螺母,3-2a-9、滚珠丝杠,3-2a-10、轴承支座,3-2a-11、轴承,3-2a-12、轴承端盖。
图6中:4-1、举升调节装置,4-2、PRPS支链,4-3、动平台,5、主轴头。
图7和图8中:4-1-1、固定平台,4-1-2,动平台,4-1-3、被动RPR分支,4-1-4、主动P分支,4-1-5、定平台,4-1-6、第一转动副,4-1-7、连接杆,4-1-8、光轴导轨,4-1-9、定位导向套,4-1-10、第二转动副,4-1-11、伺服电机,4-1-12、伺服电机支座,4-1-13、联轴器,4-1-14、轴承,4-1-15、轴承支座,4-1-16、滚珠丝杠,4-1-17、滚珠丝杠螺母副,4-1-18、带轴承支座,4-1-19、光轴导轨,4-1-20、定位导向套。
图9中:4-2-1、第一伺服驱动单元,4-2-2、转动副R,4-2-3、第二伺服驱动单元,4-2-4、复合球铰。
图10中:4-2-1-1、伺服电机,4-2-1-2、联轴器,4-2-1-3、电机支座,4-2-1-4、带轴承支座,4-2-1-5、滚珠丝杠,4-2-1-6、滚珠丝杠螺母副,4-2-1-7、轴承,4-2-1-8、轴承支座,4-2-1-9、轴承端盖。
图11中:4-2-3-1、伺服电机,4-2-3-2、联轴器,4-2-3-3、轴承,4-2-3-4、滚珠丝杠,4-2-3-5、滚珠丝杠螺母副,4-2-3-6、伸缩杆,1 4-2-3-7、连接块,4-2-3-8、套筒,4-2-3-9、连接块2。
图12中:4-2-4-1、第一回转轴,4-2-4-2、第二回转轴,4-2-4-3、第三回转轴,4-2-4-4、轴承,4-2-4-5、连接块1,4-2-4-6、锁紧螺母,4-2-4-7、轴承,4-2-4-8、轴承端盖。
具体实施方式
本发明的一种具有可重构特性的大行程、高刚度串并混联机床结合附图及实施例进一步详细说明。
如图1所示的一种具有可重构特性的大行程、高刚度串并混联机床整体结构示意图,其包括固定工作台1、X向移动单元组件2、Y向移动单元组件3、举升调节装置4-1、连接动平台与举升调节装置4-1的三条结构相同的驱动支链4-2以及主轴头5。
如图2和3所示,所述固定工作台1上装有专用夹具,在固定平台侧面设有X向“回”型移动单元组件2,在“回”型移动单元组件2的机架2-1上安装两个相同的滚珠丝杠驱动单元2-2a和2-2b,其中,滚珠丝杠驱动单元2-2a包括伺服电机2-2a-1,联轴器2-2a-2和电机支座2-2a-3,伺服电机2-2a-1安装在电机支座2-2a-3上,伺服电机2-2a-1输出轴通过联轴器2-2a-2与滚珠丝杠2-2a-3传动连接,滚珠丝杠2-2a-3一端通过带支座的轴承2-2a-4固定安装在电机支座2-2a-3的孔内,滚珠丝杠2-2a-3通过滚珠丝杠螺母副2-2a-6将螺旋运动转为直线运动,在滚珠丝杠螺母副2-2a-6上螺栓连接螺母副连接块2-2a-11,将螺母副连接块2-2a-11和四个滚珠箱式直线滑块2-2a-12与Y向“回”型移动单元3相连接,滚珠箱式直线滑块2-2a-12在光轴导轨2-2a-7上线性移动,滚珠丝杠2-2a-3的另一端通过轴承2-2a-8连接安装在轴承支座2-2a-10中,轴承支座2-2a-10通过螺栓固定在X向移动单元2的机架2-1上,轴承2-2a-8外侧加轴承端盖2-2a-9固定。在X向“回”型移动单元的机架2-1的顶部安装一对便于吊装搬运的吊耳2-3。在两对滚珠丝杠驱动单元的两个螺母副连接块2-2a-11和八个滚珠箱式直线滑块2-2a-12与Y向“回”型移动单元3相连接。
如图4和5所示,在Y向“回”型移动单元3的机架3-1上双侧装有滚珠丝杠驱动单元3-2a和3-2b,其中驱动单元包括伺服电机3-2a-1,联轴器3-2a-2和电机支座3-2a-3,伺服电机3-2a-1安装在电机支座3-2a-3上,伺服电机3-2a-1输出轴通过联轴器3-2a-2与滚珠丝杠3-2a-9传动连接,滚珠丝杠3-2a-9一端通过轴承3-2a-4固定安装在电机支座3-2a-3的孔内,轴承3-2a-4的外侧加轴承端盖3-2a-5,滚珠丝杠3-2a-9通过螺母副3-2a-8将螺旋运动转为直线运动,将两个螺母副3-2-8和八个直线滑块3-2-6通过螺栓与连接板3-3相连接,直线滑块3-2a-6在直线导轨3-2a-7上线性移动,滚珠丝杠3-2a-9的另一端通过轴承3-2a-11连接安装在轴承支座3-2a-10中,轴承支座3-2a-10通过螺栓固定在移动单元3的机架3-1上,轴承3-2a-11外侧加轴承端盖3-2a-12固定。连接板3-3上有定位孔,与举升调节装置4-1的固定平台的定位孔相连接。
如图6所示,举升调节装置4-1的固定平台与Y向移动单元3的连接板3-3连接,举升调节装置4-1的连接杆与并联机构的三条结构相同的PRPS驱动分支4-2相连接,并联机构的动平台4-3与三条结构相同的PRPS驱动分支的末端连接,并在动平台4-3中心安装主轴头5。
如图7和8所示,举升调节装置4-1是由固定平台a 4-1-1,动平台4-1-2和连接定平台和动平台的三条结构相同的被动RPR分支4-1-3和主动P分支4-1-4以及定平台b 4-1-5组成,其中RPR被动分支4-1-3由第一转动副R 4-1-6、连接杆4-1-7、三条结构不同的光轴导轨4-1-8、三个定位导向套4-1-9、第二转动副R 4-1-10组成,中间恰约束主动P分支的伺服驱动单元包括伺服电机4-1-11、伺服电机支座4-1-12、联轴器4-1-13、轴承4-1-14、轴承支座4-1-15、滚珠丝杠4-1-16、滚珠丝杠螺母4-1-17、带轴承支座4-1-18,同时有两条结构相同的光轴导轨4-1-19通过两个结构相同的定位导向套4-1-20与固定平台a4-1-1和定平台b4-1-5连接,且定位导向套4-1-20与动平台4-1-2固定连接。所述举升调节装置4-1的第一转动副R 4-1-6的轴线与第二转动副R 4-1-10的轴线相互平行,且与固定平台4-1-1中心与第一转动副R 4-1-6的铰点连线相垂直,三条结构相同的RPR分支呈轴对称分布。
如图9所示,三条结构相同的PRPS驱动分支4-2连接举升装置4-1的固定平台4-1-1和动平台4-3,其中单支链PRPS驱动分支包括第一伺服驱动单元4-2-1、转动副R 4-2-2、第二伺服驱动单元4-2-3、复合球铰4-2-4。所述PRPS驱动分支中的转动副4-2-2轴线与第一伺服驱动单元4-2-1的运动方向垂直,并与第二伺服驱动单元4-2-3的移动方向相垂直,且所述三条结构相同的PRPS驱动分支均匀分布在举升调节装置的连接杆4-1-7上。
如图10所示,第一伺服驱动单元4-2-1包括伺服电机4-2-1-1、联轴器4-2-1-2、电机支座4-2-1-3、带轴承支座4-2-1-4、滚珠丝杠4-2-1-5、滚珠丝杠螺母副4-2-1-6、轴承4-2-1-7、轴承支座4-2-1-8、轴承端盖4-2-1-9、连接块4-2-1-10,其中连接块4-2-1-10通过螺栓与滚珠丝杠螺母副4-2-1-6连接,在连接块4-2-1-10的底部有一对滑块4-2-1-11,滑块4-2-1-11在直线导轨4-2-1-12上滑动。
如图11所示,第一伺服驱动单元4-2-1通过转动副R 4-2-2的连接块与第二伺服驱动单元4-2-3连接,其中第二伺服驱动单元4-2-3包括伺服电机4-2-3-1、联轴器4-2-3-2、轴承4-2-3-3、滚珠丝杠4-2-3-4、滚珠丝杠螺母副4-2-3-5、伸缩杆4-2-3-6、连接块1 4-2-3-7、套筒4-2-3-8、连接块2 4-2-3-9,转动副R 4-2-2的连接块与连接块1 4-2-3-7的一端连接,连接块1 4-2-3-7的另一端与套筒4-2-3-8连接,套筒4-2-3-8的另一端与连接块2 4-2-3-9连接。所述伺服驱动单元2 4-2-3的伺服电机4-2-3-1、联轴器4-2-3-2、轴承4-2-3-3、滚珠丝杠4-2-3-4、滚珠丝杠螺母副4-2-3-5镶嵌于伸缩支链的内部。
如图12和13所示,复合铰链4-2-4由三个两两相交的回转轴(4-2-4-1、4-2-4-1、4-2-4-1)组成,其中复合铰链4-2-4包括第一回转轴4-2-4-1、第二回转轴4-2-4-2、第三回转轴4-2-4-3、四个结构相同的轴承4-2-4-4、两个结构相同的连接块1 4-2-4-5、两个结构相同的锁紧螺母4-2-4-6、四个结构相同的轴承4-2-4-7、两个结构相同的轴承端盖4-2-4-8。复合铰链4-2-4的一端通过连接块1 4-2-4-5螺栓连接伸缩杆4-2-3-6,另一端通过连接块2连接动平台4-3,第一回转轴4-2-4-1和第三回转轴4-2-4-3上各有两个轴承4-2-4-4配对连接,锁紧螺母4-2-4-6连接在第一回转轴4-2-4-1末端,第二回转轴4-2-4-3配有四个结构相同的轴承4-2-4-7,通过两个结构相同的轴承端盖4-2-4-8固定在第二回转轴连接块的两侧。
本发明的具有可重构特性的大行程、高刚度串并混联机床在使用时,将大型复杂异构件安装在专用夹具上,将专用夹具连接在固定平台上,主轴头安装在动平台末端,能完成高精度的加工作业任务要求。
Claims (1)
1.一种具有可重构特性的大行程、高刚度串并混联机床,其包括固定工作台、X向移动单元组件、Y向移动单元组件、举升调节装置、三条相同的驱动支链、动平台以及主轴头,其特征在于:所述固定工作台上装有专用夹具,在固定平台侧面设有X向“回”型移动单元组件,在X向“回”型移动单元组件的机架上安装两个相同的滚珠丝杠驱动单元组件,将滚珠丝杠驱动单元组件的滑块和螺母连接块与Y向“回”型移动单元组件相连接,在Y向“回”型移动单元组件的机架上双侧装有滚珠丝杠驱动单元组件,将其上的螺母连接块和滑块与连接板相连接,连接板的另一端与举升调节装置的固定平台相连接,三条结构相同的驱动分支一端连接举升装置,另一端连接动平台,在动平台末端安装主轴头;
所述举升调节装置包括三个结构相同的RPR被动分支和中间恰约束主动P分支,其中RPR被动分支包括第一转动副R、滑动导杆、第二转动副R,所述装置的固定平台通过第一转动副R与RPR被动分支中的被动P副的连接杆相连,P副的另一端与第二转动副R相连,三条结构相同的RPR分支呈轴对称分布,中间恰约束主动P分支通过伺服电机单元连接该装置的固定平台和动平台;
所述三条结构相同的驱动分支为PRPS支链,主要包括第一伺服驱动单元、转动副、第二伺服驱动单元、复合球铰;其中第一伺服驱动单元包括伺服电机、电机支座、联轴器、两个轴承、两个轴承支座、滚珠丝杠、滚珠丝杠螺母副、两个导轨、两个直线滑块,其中连接杆上方设有相互平行的两个导轨,每个导轨上均设有直线滑块,滑块位于连接块的底部,电机位于连接杆的末端,电机固定在电机支座上;伸缩支链下端通过转动副R与丝杠螺母副连接块相连接,上端与复合球铰相连,第二伺服驱动单元镶嵌于伸缩支链的内部,其中第二伺服驱动单元包括伺服电机、联轴器、一个轴承、一个轴承支座、滚珠丝杠、滚珠丝杠螺母副、伸缩杆、第一连接块、套筒、第二连接块;复合球铰由三个两两相交的回转轴组成,复合铰链的一端与伸缩杆相连,另一端与动平台相连接;所述PRPS支链中的转动副轴线与第一伺服驱动单元的运动方向垂直,并与第二伺服驱动单元的移动方向相垂直,且所述支链均匀分布在举升调节装置的连接杆上;
所述举升调节装置的RPR分支中,第一转动副轴线R与第二转动副轴线R平行,且第一转动副轴线与固定平台中心与第一转动副R铰点的连线相垂直,第一转动副R与第二转动副R之间连接的移动副P是被动的,中间恰约束支链P分支中的驱动是主动的,所述三条结构相同的RPR分支对称均匀分布,该举升调节装置的机构组合为3RPR+P型运动支链;
连接举升调节装置与动平台之间的PRPS支链中的两个移动副为双重驱动,且转动副的轴线方向与两驱动副移动方向互相垂直。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710726499.8A CN107443173B (zh) | 2017-08-22 | 2017-08-22 | 一种具有可重构特性的大行程、高刚度串并混联机床 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710726499.8A CN107443173B (zh) | 2017-08-22 | 2017-08-22 | 一种具有可重构特性的大行程、高刚度串并混联机床 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107443173A CN107443173A (zh) | 2017-12-08 |
| CN107443173B true CN107443173B (zh) | 2023-05-09 |
Family
ID=60493762
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710726499.8A Active CN107443173B (zh) | 2017-08-22 | 2017-08-22 | 一种具有可重构特性的大行程、高刚度串并混联机床 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107443173B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110119100B (zh) * | 2019-04-15 | 2021-12-31 | 广东精铟海洋工程创新研究有限公司 | 一种可调型六自由度平台的智能控制系统及方法 |
| CN109986540B (zh) * | 2019-04-15 | 2022-04-29 | 广东精铟海洋工程创新研究有限公司 | 一种可调型六自由度平台 |
| CN110026786B (zh) * | 2019-04-16 | 2020-08-11 | 北京交通大学 | 一种具有可重构特性的大行程五自由度混联机床 |
| CN110524509B (zh) * | 2019-07-25 | 2021-03-26 | 航天材料及工艺研究所 | 一种基于数控机床的接触式定位画线装置及方法 |
| CN113211153A (zh) * | 2021-05-19 | 2021-08-06 | 深圳市新沧海机械有限公司 | 用于旋切设备的刀具进给结构 |
| CN115645006A (zh) * | 2022-10-17 | 2023-01-31 | 哈尔滨理工大学 | 一种具有针尖位姿调整功能的柔性针穿刺装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5656905A (en) * | 1995-04-03 | 1997-08-12 | Tsai; Lung-Wen | Multi-degree-of-freedom mechanisms for machine tools and the like |
| CN104772628A (zh) * | 2015-03-04 | 2015-07-15 | 清华大学 | 一种三自由度并联主轴头机构 |
| CN105437216A (zh) * | 2015-12-23 | 2016-03-30 | 北京交通大学 | 一种新型具有可重构特性的并联机构 |
| CN106002342A (zh) * | 2016-07-01 | 2016-10-12 | 中国地质大学(武汉) | 一种五轴联动串并联机床 |
| CN106903677A (zh) * | 2017-04-21 | 2017-06-30 | 北京交通大学 | 一种具有两转动一移动的结构冗余并联机构 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013222456A1 (de) * | 2013-11-05 | 2015-05-07 | Kuka Laboratories Gmbh | Verfahren zum Programmieren von Bewegungsabläufen eines redundanten Industrieroboters und zugehöriger Industrieroboter |
-
2017
- 2017-08-22 CN CN201710726499.8A patent/CN107443173B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5656905A (en) * | 1995-04-03 | 1997-08-12 | Tsai; Lung-Wen | Multi-degree-of-freedom mechanisms for machine tools and the like |
| CN104772628A (zh) * | 2015-03-04 | 2015-07-15 | 清华大学 | 一种三自由度并联主轴头机构 |
| CN105437216A (zh) * | 2015-12-23 | 2016-03-30 | 北京交通大学 | 一种新型具有可重构特性的并联机构 |
| CN106002342A (zh) * | 2016-07-01 | 2016-10-12 | 中国地质大学(武汉) | 一种五轴联动串并联机床 |
| CN106903677A (zh) * | 2017-04-21 | 2017-06-30 | 北京交通大学 | 一种具有两转动一移动的结构冗余并联机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107443173A (zh) | 2017-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107443173B (zh) | 一种具有可重构特性的大行程、高刚度串并混联机床 | |
| CN105855906B (zh) | 一种具有空间三自由度的并联机构 | |
| CN204976628U (zh) | 一种五自由度工业机器人 | |
| CN200988220Y (zh) | 实现两维移动两维转动的并联机器人机构 | |
| CN105855921B (zh) | 具有空间三自由度的并联机构 | |
| CN114227649B (zh) | 一种三移两转五自由度并联驱动机器人 | |
| CN102528525A (zh) | 一种六自由度高架龙门式混联构型机床 | |
| CN110026967A (zh) | 一种2pru-2pur三自由度冗余驱动并联机构 | |
| CN110026786B (zh) | 一种具有可重构特性的大行程五自由度混联机床 | |
| CN111923025A (zh) | 一种具有两个操作模式的三分支并联机构 | |
| CN103240614B (zh) | 一种冗余驱动五轴联动混联机床 | |
| CN205588291U (zh) | 四自由度并联机构 | |
| CN112123323A (zh) | 一种4upu-up冗余驱动并联机器人 | |
| CN110053026B (zh) | 用于工件加工的五自由度混联机器人 | |
| CN111496765A (zh) | 一种空间两转动和一移动的三自由度并联机构 | |
| CN100503150C (zh) | 五自由度混联数控机床 | |
| CN106976070B (zh) | 一种可实现三维平动和一维转动的高速并联装置 | |
| CN109079761B (zh) | 一种含闭环支链的两转一移的并联机器人 | |
| CN1257041C (zh) | 基于一维移动三维转动主进给机构的并联机床结构 | |
| CN113319827A (zh) | 一种五自由度完全并联加工机器人 | |
| CN109877807A (zh) | 一种(2pru-pur)-pp五轴联动混联机器人 | |
| CN110695716A (zh) | 一种可用于大型工件复杂曲面加工的五自由度冗余驱动混联机床 | |
| CN111496766B (zh) | 一种基于电动缸的三自由度并联机构 | |
| CN109108671B (zh) | 一种用于加工筒状零部件五轴混联机床 | |
| CN207127626U (zh) | 一种具有可重构特性的大行程、高刚度串并混联机床 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |