CN107000755B - 用于估计影响车辆动力学变量的方法和对应的虚拟传感器 - Google Patents
用于估计影响车辆动力学变量的方法和对应的虚拟传感器 Download PDFInfo
- Publication number
- CN107000755B CN107000755B CN201580053535.8A CN201580053535A CN107000755B CN 107000755 B CN107000755 B CN 107000755B CN 201580053535 A CN201580053535 A CN 201580053535A CN 107000755 B CN107000755 B CN 107000755B
- Authority
- CN
- China
- Prior art keywords
- vehicle
- variable
- variables
- estimation
- dvs
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/103—Side slip angle of vehicle body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/068—Road friction coefficient
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0028—Mathematical models, e.g. for simulation
- B60W2050/0031—Mathematical model of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/114—Yaw movement
Abstract
用于估计影响车辆动力学(10)的至少一个变量(β;vx,vy;ψ,μ)的方法,包括:测量所述车辆(10)在其运动期间的动力学变量(MQ);基于所述测量的动力学变量(MQ)实时地计算所述变量(β;vx,vy;ψ,μ)的估计(公式(I))。该方法包括:通过估计过程(DVSβ;DVSβv;DVSβvμ)计算(230)所述至少一个变量(β;vx,vy;ψ,μ)的所述估计,所述估计过程(DVSβ;DVSβv;DVSβvμ)包括:考虑在所述车辆(10)在各个时间间隔(ny,nw,nψ,nx,nα)之上的运动期间测量的一组动力学变量(MQ),以及在所述一组测量的动力学变量(MQ)上应用关于所述变量(β;vx,vy;ψ,μ)计算的至少一个最优非线性回归函数 以估计来获得所述变量(β;vx,vy;ψ,μ)的所述估计;所述最优非线性回归函数
以估计来获得所述变量(β;vx,vy;ψ,μ)的所述估计;所述最优非线性回归函数 通过最优计算过程(220)而被获得,所述最优计算过程(220)包括:基于获取的一组参考数据(Dd)以及基于在所述车辆(10)的所述运动期间测量的所述一组动力学变量(MQ),针对期望的精度水平(ε)在给定的一组操作条件(OC)中找到回归函数
通过最优计算过程(220)而被获得,所述最优计算过程(220)包括:基于获取的一组参考数据(Dd)以及基于在所述车辆(10)的所述运动期间测量的所述一组动力学变量(MQ),针对期望的精度水平(ε)在给定的一组操作条件(OC)中找到回归函数 所述回归函数
所述回归函数 提供低于或等于所述期望的精度水平(ε)的估计误差,所述获取的一组参考数据(Dd)通过在所述给定的一组操作条件(OC)中获取(210)变量的一组参考数据(Dd)而被获得,所述变量包括对应于所述测量的所述车辆(10)的动力学变量(MQ)以及所述车辆(10)的横向速度(vy)和纵向速度(vx)的变量。
提供低于或等于所述期望的精度水平(ε)的估计误差,所述获取的一组参考数据(Dd)通过在所述给定的一组操作条件(OC)中获取(210)变量的一组参考数据(Dd)而被获得,所述变量包括对应于所述测量的所述车辆(10)的动力学变量(MQ)以及所述车辆(10)的横向速度(vy)和纵向速度(vx)的变量。
Description
技术领域
本说明书涉及用于设计影响车辆动力学的至少一个变量的虚拟传感器的技术,其能够使用从电子稳定性控制系统或在生产汽车和重型车辆时通常可用的其他装置测量的数据实时地给出所关心的变量的可靠估计。
这些技术特别地意在估计车辆的侧滑角和/或横向和纵向速度和/或轮胎-道路摩擦系数。在生产车辆时实时地获得这些变量的可靠估计可以允许实现了超越当前设计的显著的性能提升的对稳定性、牵引和制动控制系统的设计。
背景技术
在过去一些年中已经提出了许多关于本发明的技术问题目的 (即,影响车辆动力学的变量(例如侧滑角)的估计)的方法,所述方法的直接测量需要使用对它们在生产车辆中使用而言太复杂和/或昂贵的传感器。所有这些方法基于两步过程:首先,车辆的合适的模型(该模型包括例如具有给定的自由度的动力学或运动学公式)被推导;随后,基于所推导的模型设计合适的估计算法(其可以除了别的以外基于卡尔曼滤波器,或滑动模式观测器,或水平移动估计器,或粒子滤波器),并且所述估计算法被实现在用于使用可从ESC系统或其他车辆装置获得的数据(例如,关于转向角、车轮速度、偏航率、横向加速度等等的信号)来实时地估计所关心的变量(例如侧滑角)的电子板上。
这些两步方法具有严重的缺点,其被综合地描述如下。所述估计算法在识别的模型上操作,所述模型仅仅是真实车辆动力学行为的近似描述。即使可以获得非常精确的模型,当所识别的模型是非线性时,找到最优估计(例如最小方差)在计算上是难处理的,并且随后使用在计算上易处理但是必然是近似的方法。归因于所述建模和估计步骤中的所述近似,不存在用于评估所述两步方法可以如何精确的方法。甚至对于复杂系统不容易实现估计误差的界限。甚至更相关地,所述车辆模型取决于可以根据不同的操作条件(干路或湿路、轮胎磨损状态、车辆负载等等)而改变的参数,所述不同的操作条件的实时值在正常生产车辆中没有被检测到。归因于这些问题(模型和估计近似、可变的操作条件),上面所讨论的方法看来似乎均没有已经达到设计实现可接受的估计精度的针对侧滑角、纵向和横向速度、轮胎-路面摩擦系数的估计算法的能力。这也通过如下事实被证明:使用这些方法设计的这些变量的估计器没有已经在商品化的车辆上被使得是可用的。
发明内容
一个或多个实施例的目的是克服根据现有技术可实现的解决方案中的固有的限制。
根据一个或多个实施例,该目的由于具有权利要求1中所指定的特征的用于估计影响车辆动力学的变量的方法而被实现。一个或多个实施例可以涉及相应的系统、涉及虚拟传感器模块、涉及配备有这样的系统或虚拟传感器模块的车辆、以及涉及能够被加载到至少一个计算机的存储器中并且包括软件代码的一些部分的计算机程序产品,所述软件代码在所述产品在至少一个计算机上被运行时能够执行所述方法的步骤。如此处所使用的,提及这样的计算机程序产品被理解为等同于提及包含用于控制所述处理系统以便协调根据所述实施例的方法的实现的指令的计算机可读装置。提及“至少一个计算机”显然意在突出以模块化和/或分布式形式实现所提出的实施例的可能性。所述至少一个计算机可以例如在车辆的电子控制板或包括用于实现上述方法的软件代码的一些部分的所谓的电子控制单元(ECU)的级别处。
权利要求形成此处关于各种实施例提供的技术教导的组成部分。
根据此处所描述的解决方案,所述方法包括:
通过估计过程来计算所述至少一个变量的估计,所述估计过程包括:
考虑在所述车辆在各个时间间隔之上的运动期间测量的一组动力学变量,以及
在所述一组测量的动力学变量上应用关于所述变量计算的至少一个最优非线性回归函数,以估计来获得所述变量的估计,
所述最优非线性回归函数通过离线最优计算过程而被获得,所述离线最优计算过程包括:
基于获取的一组参考数据并且基于在所述车辆的运动期间测量的所述一组动力学变量,针对期望的精度等级在给定的一组操作条件中找到回归函数,该回归函数提供低于或等于所述期望的精度等级的估计误差,
通过在所述给定的一组操作条件中获取变量的一组参考数据,所述获取的一组参考数据被获得,所述变量包括对应于所测量的所述车辆的动力学变量以及所述车辆的横向和纵向速度的变量。
在各种实施例中,从测试车辆和/或从车辆模拟器获取的所述测量的变量包括转向角、横向加速度、四轮速度、偏航率、纵向加速度,并且获取一组参考数据的操作包括获取与所述测量的变量以及与横向和纵向速度相关的数据,从在测试车辆上运行的特定传感器和/或从车辆模拟器获得后者。
在各种实施例中,通过在测试车辆上的测试和/或通过所述车辆的模拟器来获取所述一组参考数据。
在各种实施例中,获得非线性回归函数的操作包括:在给定属于具有给定的衰退记忆的一类函数的函数的情况下,在这样的类中找到如下这样的函数:其利用横向速度与纵向速度的比率的反正切使在先前的时刻处测量的变量的数据向量之上计算的所述函数的差的模量的测量时间间隔之上的最大值最小化,将所找到的所述函数分配为非线性回归函数以获得所述估计。
在各种实施例中,所述侧滑角被计算为所述横向速度和所述纵向速度的估计(尤其是它们的比率的反正切)的函数、,所述纵向速度的估计被获得,作为基于与所述纵向速度相关的所述一组测量的变量的子集计算的最优非线性回归函数,所述子集包括与转向角、四轮速度和纵向加速度相关的数据,所述横向速度的估计被获得,作为基于包括横向加速度和偏航率的所述一组测量的变量的另一子集以及先前获得的所述纵向速度的估计计算的最优非线性回归函数。
在各种实施例中,用于估计影响车辆动力学的至少一个变量的传感器被实现在处理模块上,并且被配置为计算描述车辆的运动动力学的所述至少一个变量的估计,考虑在所述车辆的运动期间测量的所述一组动力学变量,并且向所述一组测量的动力学变量应用至少最优非线性回归函数以获得所述估计,所述最优非线性回归函数根据前述实施例中的任一个的方法而被获得。
在各种实施例中,所述传感器具有被包括在所述电子控制单元中或所述车辆的电子控制板中的处理模块。
在各种实施例中,所述传感器从被配置为测量包括ESC(电子稳定性控制)系统的车辆的动力学变量的模块接收在所述车辆的运动期间测量的所述一组动力学变量。
在各种实施例中,所述传感器被集成在用于估计影响车辆动力学的至少一个变量的系统中,包括被配置为在其运动期间测量所述车辆的动力学变量的所述模块,并且所述处理模块被配置为基于这样的测量的动力学变量实时地计算影响车辆动力学的所述至少一个变量的估计。
附图说明
现在将仅通过参考附图的非限制性实例的方式来描述实施例,在其中:
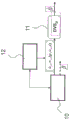
图1显示了虚拟传感器系统的框图,所述虚拟传感器系统在车辆上在线地实现根据一个实施例的方法,以便实时地估计侧滑角;
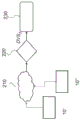
图2表示由所述方法离线地执行以便设计所述虚拟传感器的操作的框图。
具体实施方式
随后的描述示出了旨在深入理解实施例的各种特定的细节。所述实施例可以在没有所述特定的细节中的一个或多个的情况下被实现,或者使用其他方法、部件、材料等等被实现。在其他情况下,已知的结构、材料或操作没有被详细地示出或描述,以致所述实施例的各个方面将不会是模糊不清的。
在本说明书的框架中提及“实施例”或“一个实施例”意在指示关于该实施例描述的特定配置、结构或特性被包括在至少一个实施例中。同样地,可能存在于本说明书的各个点中的诸如“在实施例中”或“在一个实施例中”的短语不一定指的是同一个实施例。此外,特定的构造、结构或特性可以在一个或多个实施例中被适当地组合。
此处所使用的参考仅仅意在方便,并且因此不限定保护的范围或所述实施例的范围。
在图1中,显示了示意性地表示用于实时地估计车辆的侧滑角的虚拟传感器的实施例的框图。
用参考标号10指示的框代表要被测量的侧滑角β与其相关联的车辆。ESC系统12或所述车辆的另一系统基于所述车辆10的在其运动期间的变量的值的测量来控制所述车辆10的稳定性,其以本身已知的方式测量所述车辆10在其运动期间的下列测量的变量MQ:转向角α、横向加速度ay、四轮速度Ws、偏航率 纵向加速度ax。如所述,这些是基本上由ESC系统测量的变量,并且此处所描述的方法优选地仅基于由所述ESC12测量的这样的变量而实时地操作。这样的变量MQ被馈送至侧滑角虚拟传感器模块11,所述侧滑角虚拟传感器模块11基于这样的变量实时地提供所述车辆10的侧滑角β的估计
纵向加速度ax。如所述,这些是基本上由ESC系统测量的变量,并且此处所描述的方法优选地仅基于由所述ESC12测量的这样的变量而实时地操作。这样的变量MQ被馈送至侧滑角虚拟传感器模块11,所述侧滑角虚拟传感器模块11基于这样的变量实时地提供所述车辆10的侧滑角β的估计
所述虚拟传感器11实现用于估计影响车辆的运动的变量(尤其是在如下这样的侧滑角的情况下:所述侧滑角通过在图2中简要勾画的方法而被设计)的过程DVSβ。该方法包括如下步骤210:通过来自测试车辆10’的测量值或通过经由车辆模拟器10”的模拟,或者通过测量所述数据的一部分并且通过模拟所述数据的其他部分,获取参考数据集Dd。关于通过测量参考数据进行的获取,所述测试车辆10’必须是与在其上实施所述传感器11的车辆10相同类型的车辆。
所述参考数据集Dd随后被传递至所述虚拟传感器DVSβ的设计的操作220,所述虚拟传感器DVSβ随后在步骤230中被实现在软件模块11中。该模块(其被嵌入在车辆10上可用的ECU中)实时地仅接收关于由所述车辆电子稳定性控制12测量的所测量的变量MQ的信号,即 实时地提供所述侧滑角β的估计
实时地提供所述侧滑角β的估计
在此处所描述的实施例中,所述一组参考采样的数据Dd如下:

其中t表示所述获取的时刻,从Δt变化至N*Δt,其中Δt是采样时间,并且N是获取的样本的数量。为了符号简化的目的,在下面考虑采样时间Δt=1。该参考数据集Dd可以包括典型地在测试车辆(尤其是汽车或重型车辆)上测量的实验数据,用于评估所考虑的车辆的动力学性能,尤其是由用于构建和测试所述车辆模型的已知的两步骤方法使用的变量的数据。然而,这样的参考数据或该参考数据的一部分也可以不是通过直接测量而是通过模拟被获取:如果所述车辆的可靠的模拟器是可用的,则可以通过这样的模拟器生成等式(1)的参考数据集Dd的数据。在两种情况下,所述参考数据集Dd的这样的数据必须与在针对速度、制动、道路-轮胎摩擦条件、车辆负载、驾驶风格和其他参数的给定的范围内执行的(被实施的或被模拟的)驾驶测试相关,其限定所述车辆10的不同的操作条件OC(尤其是所关心的操作条件)。
根据等式(1),所述参考数据集Dd包括对应于在所述车辆运动期间在所述车辆10上测量的由所述ESC系统12提供给所述虚拟传感器 11的变量MQ的所获取的参考数据 即转向角α、横向加速度ay、四轮速度Ws、偏航率
即转向角α、横向加速度ay、四轮速度Ws、偏航率 纵向加速度ax。然而,所述参考数据集Dd也包括与纵向和横向速度Vx和Vy相关的另外的所获取的参考数据。这些纵向和横向速度Vx和Vy数据可以优选地由所述车辆模拟器提供,以便将虚拟传感器11的离线设计所必需的测量设备保持为最小。然而,在根据测试车辆上的测量值而获得所述参考数据集Dd的情况下,这些数据可以通过实验室光学或惯性加GPS传感器(以本身已知的方式)而被提供。所述纵向和横向速度Vx和Vy数据仅被使用在由所述虚拟传感器11实现的估计过程DVSβ的定义或设计中,并且对于实时估计是不需要的。
纵向加速度ax。然而,所述参考数据集Dd也包括与纵向和横向速度Vx和Vy相关的另外的所获取的参考数据。这些纵向和横向速度Vx和Vy数据可以优选地由所述车辆模拟器提供,以便将虚拟传感器11的离线设计所必需的测量设备保持为最小。然而,在根据测试车辆上的测量值而获得所述参考数据集Dd的情况下,这些数据可以通过实验室光学或惯性加GPS传感器(以本身已知的方式)而被提供。所述纵向和横向速度Vx和Vy数据仅被使用在由所述虚拟传感器11实现的估计过程DVSβ的定义或设计中,并且对于实时估计是不需要的。
此处一般地描述了用于影响车辆动力学的变量的估计的解决方案。尽管下面描述的实施例主要意在获得侧滑角的估计,在这些实施例中的一些中,此处所描述的方法可以被用于估计在描述车辆的运动时所关心的其它变量,而不必也获得所述侧滑角。
此处所描述的解决方案的实施例一般基于虚拟传感器DVSβ的实现,作为离散时间非线性回归方程,其形式为:


即,给定在其处被测量的变量MQ的时间t,通过在变元向量rβ(t)处评估的非线性回归函数fβ的值获得在后续的时刻t+1处的所估计的侧滑角 所述变元向量rβ(t)是从车辆10的ESC系统12获取的变量(其在是给定的整数的相应的时间间隔ny、nw、nψ、nx和nα之上被测量) 的向量。这样的时间间隔ny、nw、nψ、nx和nα定义了所述虚拟传感器 DVSβ的存储器,并且可以被设置为相对于彼此不同的时间间隔。
所述变元向量rβ(t)是从车辆10的ESC系统12获取的变量(其在是给定的整数的相应的时间间隔ny、nw、nψ、nx和nα之上被测量) 的向量。这样的时间间隔ny、nw、nψ、nx和nα定义了所述虚拟传感器 DVSβ的存储器,并且可以被设置为相对于彼此不同的时间间隔。
通过找到是下面的ε-鲁棒设计问题的解的函数fβ,设计所述虚拟传感器DVSβ的操作220被获得:利用被包含在所述参考数据集Dd中以及关于它们的测量精度的信息的数据(即每个测量的值用其测量精度或误差而被考虑),针对期望的精度水平ε,找到回归函数fβ,所述回归函数fβ给出被定界为 的估计误差,即所述侧滑角β和其估计
的估计误差,即所述侧滑角β和其估计 之间的差的模数低于或等于对于所关心的操作条件 OC的整个范围(所述操作条件OC可以除了别的以外包括道路-轮胎摩擦、车辆负载、轮胎状态)的针对任何时间t的期望的精度水平ε,所述测试车辆或模拟器经历这样的操作条件OC以在步骤210处获得所述数据集Dd。
之间的差的模数低于或等于对于所关心的操作条件 OC的整个范围(所述操作条件OC可以除了别的以外包括道路-轮胎摩擦、车辆负载、轮胎状态)的针对任何时间t的期望的精度水平ε,所述测试车辆或模拟器经历这样的操作条件OC以在步骤210处获得所述数据集Dd。
此处呈现三个实施例实例。
在导致被指示为DVSβ的虚拟传感器的第一实施例中,所述离线操作220与找到下面的最优化问题的回归函数解 相关:
相关:

其中被包含在所述参考数据集Dd中的数据被用于计算(3)的右端侧。
F是具有给定的衰退记忆的一类函数,其被定义为:

即,F类的函数f与针对每个时间t的Lipschitz条件有关。所述Lipschitz条件的常数是参数γ、ρ与第k次方的乘积,其中0≤γ<∞,0≤ρ<∞,并且k从1变化至m,其中m=max[ny,nw,nψ,nx,nα],即所述变量MQ的不同测量间隔之中的最大间隔。
回顾前面:按照定义,所述侧滑角是β(t)=arctan(vy(t)/vx(t)和 参见公式(2),由此可见,(3)的回归函数
参见公式(2),由此可见,(3)的回归函数 解被得知为在衰退记忆函数的所述类F中的函数f,其使得对于任何时刻t以及对于在被用于获取所述参考数据集Dd的实验条件中考虑的所关心的操作条件OC(干/湿路面或道路-轮胎摩擦系数、车辆负载、轮胎状态等等)的整个范围的最大估计误差
解被得知为在衰退记忆函数的所述类F中的函数f,其使得对于任何时刻t以及对于在被用于获取所述参考数据集Dd的实验条件中考虑的所关心的操作条件OC(干/湿路面或道路-轮胎摩擦系数、车辆负载、轮胎状态等等)的整个范围的最大估计误差 最小化。
最小化。
等式(3)和(4)中的ρ和m的值是估计过程DVSβ的设计参数:越大的值被选择,则能够被实现的估计误差ε越低,但是所述估计 的瞬时响应时间越大。
的瞬时响应时间越大。
根据C.Novara、F.Ruiz、M.Milanese的文章“Direct Filtering: A New Approachto Optimal Filter Design for Nonlinear Systems (直接滤波:针对非线性系统的最优滤波器设计的新方法)”(IEEE论文集,关于自动化控制,58,89-99页,2013)中的章节D中所描述的过程的步骤5b,参数γ的值可以被选择,在所述参考数据Dd上运算。
在同一文章的章节II.D中,用于求解所述最优化问题(3)的方法被描述。
最后,让ε*被计算为:

其中,被包含在所述参考数据集Dd中的数据被用于计算(5)的右端侧。
针对被包括在所述数据集Dd中的所有时间t和操作条件OC的整个范围,由所述函数 描述的所述估计过程DVSβ的误差被限制为
描述的所述估计过程DVSβ的误差被限制为 随后,如果ε*≤ε,则所导出的虚拟传感器DVSβ是对所述ε-鲁棒设计问题的解。
随后,如果ε*≤ε,则所导出的虚拟传感器DVSβ是对所述ε-鲁棒设计问题的解。
使用被包含在所述参考数据集Dd中的数据,通过离线操作220执行从(3)至(5)的所有计算。
在所述车辆上实时地实施此实施例的虚拟传感器(由图1中的11 表示)在当前时间t处如下地计算所述侧滑角β(t)的估计β*(t):

其中,从所述ESC模块12获取所需的时间处的ay,ws,ax, α的值,并且
α的值,并且 是离线计算的作为(3)的解的回归函数。
是离线计算的作为(3)的解的回归函数。
因此,所述第一实施例涉及用于估计至少一个变量的方法,该变量在所述实施例中是影响所述车辆10的动力学的侧滑角β,包括:在所述车辆10的运动期间测量所述车辆10的变量MQ,基于这样的测量的变量MQ实时地计算由所述侧滑角β表示的所述变量的估计β*,执行通过估计过程DVSβ计算所述侧滑角β的估计的步骤230,包括:考虑一组变量MQ,即从所述ESC系统12获取的变量(其在所述车辆 10的所述运动期间在相应的时间间隔ny、nw、nψ、nx、nα之上被测量) 的向量rβ(t),并且在这样的一组测量的变量上应用关于这样的侧滑角β计算的最优非线性回归函数 以获得这样的估计,所述最优非线性回归函数
以获得这样的估计,所述最优非线性回归函数 通过离线最优计算过程(即,操作220)而被获得,包括:基于所获得的参考数据集Dd,针对期望的精度水平ε在给定的一组操作条件OC中找到给出低于或等于所述期望的精度水平ε的估计误差的回归函数fβ,所获取的参考数据集Dd通过在所述给定的一组操作条件OC中获取变量的一组参考数据Dd的操作210而被获得,所述变量包括对应于所述车辆10的所述测量的变量MQ以及所述车辆10 的横向速度Vy和纵向速度Vx的变量。
通过离线最优计算过程(即,操作220)而被获得,包括:基于所获得的参考数据集Dd,针对期望的精度水平ε在给定的一组操作条件OC中找到给出低于或等于所述期望的精度水平ε的估计误差的回归函数fβ,所获取的参考数据集Dd通过在所述给定的一组操作条件OC中获取变量的一组参考数据Dd的操作210而被获得,所述变量包括对应于所述车辆10的所述测量的变量MQ以及所述车辆10 的横向速度Vy和纵向速度Vx的变量。
导致所述车辆侧滑角的虚拟传感器的第二实施例(被指示为DVS βv)基于分别被指示为DVSvx和DVSvy的纵向速度νx和横向速度νy的两个虚拟传感器的设计。
这两个虚拟传感器由利用参考数据Dd的离线操作220以如下方式被设计:
-获得如下形式的虚拟传感器DVSvx:

rx(t-1)=ws(t-1),.,ws(t-nw-1),ax(t-1),.,ax(t-nx-1),α(t-1),.,α(t-nα-1)
rx是由所述测量的变量MQ的子集(即,所述四轮速度w、纵向加速度ax和转向角α)组成的向量。在各种实施例中,针对所述组成向量rx的子集的其他选择是可能的。


其中,被包含在所述参考数据集Dd中的数据被用于计算(8)的右端侧。
上述最优化问题的 解给出了纵向速度νx(t)的估计
解给出了纵向速度νx(t)的估计 其使得针对任何t以及针对在被用于获取所述参考数据集Dd的实验条件中考虑的所关心的操作条件OC(干/湿道路、车辆负载、轮胎状态等等) 的整个范围的最大估计误差
其使得针对任何t以及针对在被用于获取所述参考数据集Dd的实验条件中考虑的所关心的操作条件OC(干/湿道路、车辆负载、轮胎状态等等) 的整个范围的最大估计误差 最小化。
最小化。
-获得如下形式的虚拟传感器DVSvy:


ry是由所述测量的变量MQ的子集(即横向加速度ay、偏航率 ) 组成的向量,外加从(7)和(8)获得的所述纵向速度
) 组成的向量,外加从(7)和(8)获得的所述纵向速度 的估计。在各种实施例中,针对组成向量ry的所述子集的其他选择是可能的。
的估计。在各种实施例中,针对组成向量ry的所述子集的其他选择是可能的。


其中,被包含在所述参考数据集Dd中的数据被用于计算(10)的右端侧。
上述最优化问题的 解给出了纵向速度νy(t)的估计
解给出了纵向速度νy(t)的估计 其使得针对任何t以及针对在被用于获取所述参考数据集Dd的实验条件中考虑的所关心的操作条件OC(干/湿道路、轮胎状态等等)的整个范围的最大估计误差
其使得针对任何t以及针对在被用于获取所述参考数据集Dd的实验条件中考虑的所关心的操作条件OC(干/湿道路、轮胎状态等等)的整个范围的最大估计误差 最小化。
最小化。
-由根据此第二实施例设计的所述虚拟传感器DVSβv提供的侧滑角β的估计 被定义为:
被定义为:

即,被定义为所述横向速度vy的最优估计 与所述纵向速度vx的最优估计
与所述纵向速度vx的最优估计 的比率的反正切。
的比率的反正切。
-所述量值 被计算为:
被计算为:

其中,被包含在所述参考数据集Dd中的数据被用于计算(11)的右端侧。
该量值提供了对根据此第二实施例设计的所述虚拟传感器DVSβv的估计误差的约束,即,针对所有时间t和被包括在所述数据集Dd中的操作条件OC的整个范围, 随后,如果ε*≤ε,则所导出的估计过程DVSβv是对所述ε-鲁棒设计问题的解。所述最优化问题(8)和(10)的所述解
随后,如果ε*≤ε,则所导出的估计过程DVSβv是对所述ε-鲁棒设计问题的解。所述最优化问题(8)和(10)的所述解 和
和 可以通过使用先前引用的 Novara-Ruiz-Milanese的文章中描述的算法而被获得。
可以通过使用先前引用的 Novara-Ruiz-Milanese的文章中描述的算法而被获得。
从(7)至(11)的所有计算由离线操作220使用被包含在如上面所描述的参考数据集Dd中的数据来执行。
在所述车辆上实时地实施此实施例的所述虚拟传感器DVSβv(在图1中由11表示)在当前时间t处计算执行如下操作的侧滑角β(t)的估计β*(t):
-当前时间t处的纵向速度vx(t)的估计 被计算为:
被计算为:

其中,在所需的时间处的ws,ax,α的值被从所述ESC模块12在线地获取,并且 是被离线计算为(8)的解的回归函数。
是被离线计算为(8)的解的回归函数。
-当前时间t处的横向速度vx(t)的估计 被计算为:
被计算为:

其中,在所需的时间处的ay, 的值被从所述ESC模块12在线地获取,在所需的时间处的
的值被从所述ESC模块12在线地获取,在所需的时间处的 的值是根据(12)在线计算的纵向速度的最优估计,并且
的值是根据(12)在线计算的纵向速度的最优估计,并且 是被离线计算为(10)的解的回归函数。
是被离线计算为(10)的解的回归函数。
-由所述虚拟传感器DVSβv提供的当前时间t处的侧滑角β(t)的估计 被计算为:
被计算为:

其中, 和
和 是前面经由(12)和(13)计算出的最优估计。
是前面经由(12)和(13)计算出的最优估计。
该第二实施例除了给出可能比由所述第一实施例虚拟传感器DVS β给出的更精确的侧滑角β的虚拟传感器DVSβv之外,也提供所述虚拟传感器DVSvx和DVSvy,分别给出车辆纵向和横向速度的估计。注意的是:获得这些变量的可靠估计表示相关的技术方面本身,其是针对优化牵引和制动控制系统、碰撞避免系统等等具有巨大价值的νx(t)和νy(t)的知识。
由于给出横向速度 和纵向速度
和纵向速度 的估计的(12)和(13) 的计算发生在估计所述侧滑角
的估计的(12)和(13) 的计算发生在估计所述侧滑角 的等式(14)的计算之前,通过此处所描述的所述第二实施例设计虚拟传感器DVSvx和DVSvy是可能的,所述虚拟传感器DVSvx和DVSvy仅估计横向速度和/或纵向速度,而不必也估计所述侧滑角。
的等式(14)的计算之前,通过此处所描述的所述第二实施例设计虚拟传感器DVSvx和DVSvy是可能的,所述虚拟传感器DVSvx和DVSvy仅估计横向速度和/或纵向速度,而不必也估计所述侧滑角。
导致被指示为DVSβμ的侧滑角的虚拟传感器的设计的方法的第三实施例设想在步骤210处操作所述参考数据集Dd在L个参考子集Dd1、 Dd2、...DdL中的划分。由所述给定的一组操作条件OC中的确定的所关心的操作条件识别的所述子集中的每一个包含针对所关心的这样的操作条件的相同值(或值范围)获取的数据。在此处所描述的实施例中,如下被考虑:根据可以被认为是影响车辆动力学的最相关的操作条件OC的道路-轮胎摩擦系数μ1,μ2,..,μL执行所述划分。为了阐述简化的目的,考虑L=2个子集中的划分,但是该方法可以被容易地扩展到L的更大值,如下面所显示的。假设在所述参考数据集Dd中,利用摩擦系数 获取针对t=1,..,M的数据,并且利用
获取针对t=1,..,M的数据,并且利用 获取针对t=M+1,..,N的数据,所述两个参考子集是:
获取针对t=M+1,..,N的数据,所述两个参考子集是:

在这样的划分步骤之后,在所述离线操作220中,通过找到是ε-鲁棒设计问题的解的函数来评估下面的估计器,即:
-所述侧滑角的第一估计器以下面的形式被评估:

其中,rβ(t)在等式(2)中被给出并且 是下面的最优化问题的解:
是下面的最优化问题的解:

其中,被包含在所述第一参考数据集Dd1中的数据被用于计算(16) 的右端侧。
-所述侧滑角的第二估计器以下面的形式被评估:

其中 是下面的最优化问题的解:
是下面的最优化问题的解:

其中,被包含在所述第二参考数据集Dd2中的数据被用于计算 (17)的右端侧。
-通过所述操作220评估下面形式的偏航率的第一估计器:

其中, 是由所述测量的变量MQ的子集(即,所述四轮速度ws、横向加速度ay和转向角α)组成的向量,并且
是由所述测量的变量MQ的子集(即,所述四轮速度ws、横向加速度ay和转向角α)组成的向量,并且 是所述最优化问题的解:
是所述最优化问题的解:

其中,被包含在所述第一参考数据集Dd1中的数据被用于计算(18) 的右端侧。
-所述偏航率的第二估计器以下面的形式被评估:

其中, 是下面的最优化问题的解:
是下面的最优化问题的解:

其中,被包含在所述第二参考数据集Dd2中的数据被用于计算 (19)的右端侧。
从(16)至(19)的所有计算由离线操作220使用被包含在如上面所描述的参考数据集Dd1和Dd2中的数据来执行。所述最优化问题 (16)、(17)、(18)、(19)的f*解可以通过使用先前所引用的 Novara-Ruiz-Milanese的文章中描述的算法而被获得。
在所述车辆上实时地实施此实施例的虚拟传感器(由图1中的11 表示)在当前时间t处执行下面的操作。
-当前时间t处的偏航率 的两个估计
的两个估计 和
和 被计算为:
被计算为:


其中,所需的时间处的ws,ay,α的值被从所述ESC模块12获取,并且 和
和 是在(18)和(19)中离线计算的回归函数,分别对应于考虑实际操作条件是μ=μ1或μ=μ2。
是在(18)和(19)中离线计算的回归函数,分别对应于考虑实际操作条件是μ=μ1或μ=μ2。
-下面的最优化问题的解λ*被计算:

即,在给定所述ESC模块12处实时地测量的当前时间t处的偏航率 与具有参数λ的系数函数的第一偏航率估计
与具有参数λ的系数函数的第一偏航率估计 和第二偏航率估计
和第二偏航率估计 的线性组合之间的差的绝对值的情况下,找到被包括在0 和1之间的参数λ的值,最小化这样的差。该最优化问题可以使用已知的线性搜索方法而被在线地、有效地求解。
的线性组合之间的差的绝对值的情况下,找到被包括在0 和1之间的参数λ的值,最小化这样的差。该最优化问题可以使用已知的线性搜索方法而被在线地、有效地求解。
所述当前时间t处的侧滑角β(t)的两个估计 和
和 被计算为:
被计算为:


其中,所需的时间处的ay,ws,ax, α的值被从所述ESC模块12获取,并且
α的值被从所述ESC模块12获取,并且 和
和 是在(16)和(17)中离线计算的回归函数,分别对应于考虑实际操作条件是μ=μ1或μ=μ2。
是在(16)和(17)中离线计算的回归函数,分别对应于考虑实际操作条件是μ=μ1或μ=μ2。
-最后,当前时间t处的侧滑角β(t)的估计 被计算为:
被计算为:

即,被计算为具有最优参数λ*的函数作为系数的侧滑角的所述第一和第二估计的线性组合,即所述最优参数λ*和其对一的补数的负值。
因此,刚刚描述的第三实施例通过所述偏航率的估计获得所述侧滑角β的估计 此实施例的原理如下。
此实施例的原理如下。
等式(20)和(21)定义了实时地给出所述偏航率的估计的两个虚拟传感器。
然而,所述偏航率不需要被估计,因为它实际上由所述ESC系统 12实时地测量。所述偏航率估计实际上被利用以实时地检测所述轮胎-道路摩擦系数μ的值,利用通过将所述两个偏航率估计与由所述 ESC系统12实际测量的值相比较而获得的作为所述最优化问题(22) 的解的所述最优参数λ*。
如果所述车辆10例如正在具有实际摩擦系数μ1的道路上运行,则所述第一偏航率估计 (其是根据在相同的摩擦系数μ1的条件下测量的数据而被设计的
(其是根据在相同的摩擦系数μ1的条件下测量的数据而被设计的 参见(18))给出了比所述第二偏航率估计
参见(18))给出了比所述第二偏航率估计 (其是针对不同于实际摩擦系数的摩擦系数μ2设计的
(其是针对不同于实际摩擦系数的摩擦系数μ2设计的 参见(19))更精确的估计。因此,最优化问题(22)的所述解导致λ*=1,因此检测到实际上所述车辆10正在以摩擦系数μ1运行。随后,根据等式(25),侧滑估计
参见(19))更精确的估计。因此,最优化问题(22)的所述解导致λ*=1,因此检测到实际上所述车辆10正在以摩擦系数μ1运行。随后,根据等式(25),侧滑估计 被提供。如从等式(16)和(25)可以看到的,所述侧滑角的估计
被提供。如从等式(16)和(25)可以看到的,所述侧滑角的估计 通过由使得针对所述操作条件μ1的估计误差最小化的回归函数
通过由使得针对所述操作条件μ1的估计误差最小化的回归函数 所描述的虚拟传感器而被获得。因此,利用根据所述μ值的参考数据的划分的该估计实现了比可从所述第一实施例的虚拟传感器DVSβ和所述第二实施例的虚拟传感器DVSβv实现的精度更好(或至多相等)的精度,不实时地检测轮胎-道路摩擦系数的值的所述虚拟传感器DVSβ和DVSβv需要针对所述数据集Dd考虑的μ值的范围平衡它们的估计性能。
所描述的虚拟传感器而被获得。因此,利用根据所述μ值的参考数据的划分的该估计实现了比可从所述第一实施例的虚拟传感器DVSβ和所述第二实施例的虚拟传感器DVSβv实现的精度更好(或至多相等)的精度,不实时地检测轮胎-道路摩擦系数的值的所述虚拟传感器DVSβ和DVSβv需要针对所述数据集Dd考虑的μ值的范围平衡它们的估计性能。
除了上面所讨论的在虚拟传感器DVSβ和DVSβv之上的估计精度提高之外,该第三虚拟传感器DVSβμ的另外的有趣的特征是:该第三实施例允许获得被指示为DVSμ的虚拟传感器,实时地提供了当前时间t 处的轮胎-道路摩擦系数μ(t)的估计μ*(t),其被计算如下:
μ*(t)=λ*(t)μ1(t)-(1-λ*(t))μ2(t) (26)
所述轮胎-道路摩擦系数的所述实时估计代表相关的技术方面本身。该信息确实对于许多车辆动力学问题具有相关价值,例如牵引和制动控制、车辆动力学控制、碰撞避免等等,但是目前其在正常生产车辆上是不可用的。用于仅估计所述轮胎-道路摩擦系数的虚拟传感器DVSμ的设计需要仅仅最优化问题(18)和(19)的离线解以及仅仅操作(20)、(21)、(22)和(26)的在线执行。
如所述的,刚刚针对L=2个子集中的划分描述的操作可以被容易地扩展到参考子集的数目L的更大值。在所述离线操作220中,从相似于等式(16)、(17)和(18)、(19)的L个等式计算L个函数 和L个
和L个 每一个基于对应的参考子集Dd1、Dd2、...、DdL。在所述当前时间t处在所述车辆上实时操作的虚拟传感器11计算通过相似于等式(20)、(21)的L个等式获得的所述偏航率
每一个基于对应的参考子集Dd1、Dd2、...、DdL。在所述当前时间t处在所述车辆上实时操作的虚拟传感器11计算通过相似于等式(20)、(21)的L个等式获得的所述偏航率 的L个估计
的L个估计 以及通过相似于等式(23)、(24)的L个等式获得的所述侧滑角β(t)的L个估计
以及通过相似于等式(23)、(24)的L个等式获得的所述侧滑角β(t)的L个估计 在等式(22)的向量版本中使用所述偏航率估计来确定具有总和1的正系数的向量Λ*的值,使得所述偏航率
在等式(22)的向量版本中使用所述偏航率估计来确定具有总和1的正系数的向量Λ*的值,使得所述偏航率 与这样的估计
与这样的估计 的线性组合之间的差最小化,具有所述向量Λ*的分量作为系数。最后,使用等式(25)的向量版本获得所述侧滑角,即侧滑估计
的线性组合之间的差最小化,具有所述向量Λ*的分量作为系数。最后,使用等式(25)的向量版本获得所述侧滑角,即侧滑估计 的线性组合,具有所述向量Λ*的分量作为系数。
的线性组合,具有所述向量Λ*的分量作为系数。
已经参考作为变量 的特定实例的偏航率示出了当前的实施例,所述变量
的特定实例的偏航率示出了当前的实施例,所述变量 的值在所述车辆(10)上被实时地测量并且取决于要被估计的所关心的条件,例如所述道路-摩擦系数μ。
的值在所述车辆(10)上被实时地测量并且取决于要被估计的所关心的条件,例如所述道路-摩擦系数μ。
然而,清楚的是:参考所述第三实施例描述的所述操作可以更一般地被用于基于所述系数向量Λ*来检测所关心的操作条件OC的实时值:
根据所述给定的操作条件集OC中的所关心的操作条件的值,在多个(L个)参考子集Dd1、Dd2、...、DdL中划分所述参考数据集Dd;
通过获得最优非线性回归函数的所述操作220获得影响车辆动力学的变量的对应于所述参考子集(Dd1、Dd2、...、DdL)的多个估计,其值在所述车辆10上被实时地测量并且取决于所述所关心的条件OC;
获得使所述测量的变量和影响所述车辆动力学的变量的这样的估计的线性组合之间的差最小化的最优化问题的系数的向量Λ*的解,该变量具有由所述系数的向量确定的系数。
根据此处所描述的各种实施例的解决方案允许获得下面的优点。
根据此处所描述的各种实施例的方法和虚拟传感器允许获得所关心的变量的实时估计,其与现有技术的方法不同,允许在正常生产车辆中实现。特别地,该方法是计算易处理的,并且其允许保证在生产车辆必须运行的、其实时值在生产车辆中不被检测的不同的操作条件(例如,道路-轮胎摩擦系数、负载、轮胎状态)中可以被实现的估计精度。
当然,在不损害所述实施例的原理的情况下,结构和所述实施例的细节可以相对于纯粹作为实例已在此处描述和示出的内容而广泛地变化,而不由此脱离如随附的权利要求限定的所呈现的实施例的范围。
尽管参考由ESC系统测量的变量描述了所述解决方案,该解决方案也可以使用在所述车辆上实时可用的其他测量而被实现。
在特别关注了车辆侧滑角、纵向和横向速度、轮胎-路面摩擦系数的估计的情况下,此处所描述和要求权利的解决方案被揭露,这些变量是与车辆稳定性、转向、牵引和制动的监测和控制相关的针对汽车安全系统的相关变量。然而,参考这些特定的变量不是意在被理解为以任何方式限制所述实施例,这些实施例本身也适用于其它车辆动力学变量(例如与悬架控制系统相关的垂直和侧倾变量)、与汽车领域不同的领域中相关的变量(例如航空航天和海洋交通工具中的姿态估计)。
Claims (16)
1.一种用于估计影响车辆动力学(10)的至少一个变量(β;vx,vy;ψ,μ)的方法,包括:
测量所述车辆(10)在其运动期间的动力学变量(MQ);
基于所述测量的动力学变量(MQ)实时地计算所述变量(β;vx,vy;ψ,μ)的估计
其特征在于,
通过估计过程(DVSβ;DVSβv;DVSβvμ)计算(230)所述至少一个变量(β;vx,vy;ψ,μ)的所述估计,所述估计过程(DVSβ;DVSβv;DVSβvμ)包括:
考虑在所述车辆(10)在各个时间间隔(ny,nw,nψ,nx,nα)之上的运动期间测量的一组动力学变量(MQ),以及
在所述测量的一组动力学变量(MQ)上应用关于所述变量(β;vx,vy;ψ)计算的至少一个最优非线性回归函数
 以估计来获得所述变量(β;vx,vy;ψ,μ)的所述估计,
以估计来获得所述变量(β;vx,vy;ψ,μ)的所述估计,
所述最优非线性回归函数 通过最优计算过程而被获得,所述最优计算过程包括:
通过最优计算过程而被获得,所述最优计算过程包括:
基于获取的一组参考数据(Dd)以及基于在所述车辆(10)的所述运动期间测量的所述一组动力学变量(MQ),针对期望的精度水平(ε)在给定的一组操作条件(OC)中找到回归函数
 所述回归函数
所述回归函数
 提供低于或等于所述期望的精度水平(ε)的估计误差,所述给定的一组操作条件用于获得所述获取的一组参考数据(Dd),
提供低于或等于所述期望的精度水平(ε)的估计误差,所述给定的一组操作条件用于获得所述获取的一组参考数据(Dd),
所述获取的一组参考数据(Dd)通过在所述给定的一组操作条件(OC)中获取(210)变量的一组参考数据(Dd)而被获得,所述变量包括对应于所述测量的车辆(10)的动力学变量(MQ)以及所述车辆(10)的横向速度(vy)和纵向速度(vx)的变量,
其中包括:
根据所述给定的一组操作条件(OC)中的所关心的操作条件(μ)的值(μ1,μ2)将所述参考数据集(Dd)划分在多个(L个)参考子集(Dd1,Dd2,..,DdL)中,
通过获得(220)最优非线性回归函数 的所述操作,获得影响所述车辆动力学的变量
的所述操作,获得影响所述车辆动力学的变量 的对应于所述参考子集(Dd1,Dd2,..,DdL)的多个估计
的对应于所述参考子集(Dd1,Dd2,..,DdL)的多个估计 所述变量的值也在所述车辆(10)上被实时地测量
所述变量的值也在所述车辆(10)上被实时地测量 并且所述变量的值取决于所关心的所述条件(μ),
并且所述变量的值取决于所关心的所述条件(μ),
获得最优化问题的解的系数向量(λ*;Λ),所述最优化问题的解使得所述测量的变量 与具有由所述系数向量(λ*;Λ)确定的系数的影响所述车辆动力学的变量
与具有由所述系数向量(λ*;Λ)确定的系数的影响所述车辆动力学的变量 的这样的估计
的这样的估计 的线性组合之间的差最小化。
的线性组合之间的差最小化。
2.根据权利要求1所述的方法,其特征在于,所述测量的动力学变量(MQ)包括转向角(α)、横向加速度(ay)、四轮速度(ws)、偏航率 纵向加速度(ax),并且在所述给定的一组操作条件(OC)中获取(210)一组参考数据(Dd)的所述操作包括获取与所述测量的动力学变量(MQ)以及与横向速度(vy)和纵向速度(vx)相关的数据。
纵向加速度(ax),并且在所述给定的一组操作条件(OC)中获取(210)一组参考数据(Dd)的所述操作包括获取与所述测量的动力学变量(MQ)以及与横向速度(vy)和纵向速度(vx)相关的数据。
3.根据权利要求1或2所述的方法,其特征在于,通过在测试车辆(10’)上测试和/或通过所述车辆(10)的模拟器(10”)来获取(210)所述一组参考数据(Dd)。
4.根据权利要求1所述的方法,其特征在于,获得最优非线性回归函数 的所述操作包括下列步骤:
的所述操作包括下列步骤:
在给定属于具有给定的衰退记忆的一类函数(F)的函数(f)的情况下,在所述一类函数(F)中找到针对任何时刻t以及针对所述整个给定的一组操作条件(OC)使得相对于所述变量(β;vx,vy;μ)的最大估计误差 最小化的函数,
最小化的函数,
将在前面的步骤处找到的所述函数分配为最优非线性回归函数 以获得(220)影响所述车辆动力学的所述变量的所述估计
以获得(220)影响所述车辆动力学的所述变量的所述估计
5.根据权利要求1所述的方法,其特征在于,被估计的影响车辆动力学(10)的所述至少一个变量(β;vx,vy;ψ,μ)是侧滑角
6.根据权利要求5所述的方法,其特征在于,影响车辆动力学(10)的所述至少一个变量(β;vx,vy;ψ,μ)包括所述横向速度(vx)和所述纵向速度(vy),
纵向速度的估计 被获得,作为由所述最优计算基于关于所述纵向速度(vx)的所述一组测量的动力学变量(MQ)的子集(rx)计算的最优非线性回归函数
被获得,作为由所述最优计算基于关于所述纵向速度(vx)的所述一组测量的动力学变量(MQ)的子集(rx)计算的最优非线性回归函数 所述子集(rx)包括与转向角(α)、四轮速度(ws)和纵向加速度(ax)相关的数据;
所述子集(rx)包括与转向角(α)、四轮速度(ws)和纵向加速度(ax)相关的数据;
横向速度的估计 被获得,作为由所述最优计算基于所述一组测量的动力学变量(rβ)的包括横向加速度(ay)和偏航率
被获得,作为由所述最优计算基于所述一组测量的动力学变量(rβ)的包括横向加速度(ay)和偏航率 的另一个子集(ry)以及前面获得的纵向速度的所述估计
的另一个子集(ry)以及前面获得的纵向速度的所述估计 计算的最优非线性回归函数(fy *)。
计算的最优非线性回归函数(fy *)。
7.根据权利要求6所述的方法,其特征在于包括计算作为所述横向速度的估计 和所述纵向速度的估计
和所述纵向速度的估计 的函数的所述侧滑角的所述估计
的函数的所述侧滑角的所述估计
8.根据权利要求7所述的方法,其特征在于所述函数是所述横向速度的估计 和所述纵向速度的估计
和所述纵向速度的估计 的比率的反正切的形式。
的比率的反正切的形式。
9.根据权利要求8所述的方法,其特征在于包括基于所述系数向量(λ*;Λ)检测所述所关心的操作条件的实时值(μ1,μ2),所述所关心的操作条件是道路轮胎摩擦系数。
10.根据权利要求8或9所述的方法,其特征在于包括:
通过获得最优非线性回归函数 的所述操作获得对应于所述参考子集(Dd1,Dd2,..,DdL)的所述侧滑角的估计
的所述操作获得对应于所述参考子集(Dd1,Dd2,..,DdL)的所述侧滑角的估计
将所述侧滑角(β)的所述估计 计算为所述线性参数(λ*)的所述侧滑角估计的线性组合。
计算为所述线性参数(λ*)的所述侧滑角估计的线性组合。
11.一种虚拟传感器,用于估计影响车辆动力学(10)的至少一个变量(β;vx,vy;ψ,μ),所述虚拟传感器被实现在处理模块(11)上并且被配置成计算(230)描述车辆(10)的运动动力学的至少一个变量(β;vx,vy;ψ,μ)的所述估计,所述计算考虑在所述车辆(10)的所述运动期间测量的所述一组动力学变量(MQ)并且向所述一组测量的动力学变量(MQ)至少应用最优非线性回归函数 以获得所述估计,所述最优非线性回归函数
以获得所述估计,所述最优非线性回归函数 根据权利要求1至10中的任一权利要求所述的方法而被获得。
根据权利要求1至10中的任一权利要求所述的方法而被获得。
12.根据权利要求11所述的传感器,其中,所述处理模块(11)被包括在电子控制单元中或所述车辆(10)的电子控制板中。
13.根据权利要求11或12所述的传感器,其中包括所述传感器从模块(12)接收在所述车辆(10)的所述运动期间测量的所述一组动力学变量(MQ),所述模块(12)被配置成测量包括ESC(电子稳定性控制)系统的所述车辆(10)的动力学变量(MQ)。
14.根据权利要求11所述的传感器,其特征在于被集成在用于估计影响车辆动力学(10)的至少一个变量(β;vx,vy;ψ,μ)的系统中,所述系统包括被配置成测量所述车辆(10)在其运动期间的动力学变量(MQ)的所述模块(12),并且
所述处理模块(11)被配置成基于所述测量的动力学变量(MQ)实施地计算影响车辆动力学(10)的所述至少一个变量(β;vx,vy;ψ,μ)的估计
15.一种车辆,包括根据权利要求11-14中任意一项所述的传感器。
16.一种计算机可读介质,其包含存储其上的计算机程序,所述计算机程序被运行于至少一个计算机上时执行根据权利要求1至10中的任一权利要求所述的方法的步骤。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITTO20140631 | 2014-08-04 | ||
| ITTO2014A000631 | 2014-08-04 | ||
| PCT/IB2015/055895 WO2016020834A1 (en) | 2014-08-04 | 2015-08-03 | A method for estimating variables affecting the vehicle dynamics and corresponding virtual sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107000755A CN107000755A (zh) | 2017-08-01 |
| CN107000755B true CN107000755B (zh) | 2021-01-22 |
Family
ID=51703323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580053535.8A Expired - Fee Related CN107000755B (zh) | 2014-08-04 | 2015-08-03 | 用于估计影响车辆动力学变量的方法和对应的虚拟传感器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10597039B2 (zh) |
| EP (1) | EP3177499B1 (zh) |
| JP (1) | JP6573978B2 (zh) |
| CN (1) | CN107000755B (zh) |
| WO (1) | WO2016020834A1 (zh) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017053407A1 (en) | 2015-09-24 | 2017-03-30 | Quovard Management Llc | Systems and methods for localization using surface imaging |
| WO2017053415A1 (en) | 2015-09-24 | 2017-03-30 | Quovard Management Llc | Systems and methods for surface monitoring |
| US10204461B2 (en) * | 2016-07-19 | 2019-02-12 | GM Global Technology Operations LLC | Detection and reconstruction of sensor faults |
| US10442439B1 (en) * | 2016-08-18 | 2019-10-15 | Apple Inc. | System and method for road friction coefficient estimation |
| IT201600087202A1 (it) * | 2016-08-25 | 2018-02-25 | I E T S P A | Metodo ed apparato di regolazione automatica di un veicolo in una condizione di prestazione prestabilita |
| US10343685B2 (en) | 2016-09-28 | 2019-07-09 | Baidu Usa Llc | Physical model and machine learning combined method to simulate autonomous vehicle movement |
| US10019008B2 (en) * | 2016-09-28 | 2018-07-10 | Baidu Usa Llc | Sideslip compensated control method for autonomous vehicles |
| IT201600098423A1 (it) * | 2016-09-30 | 2018-03-30 | Modelway S R L | Procedimento di progettazione di un sensore virtuale, relativo sensore virtuale, sistema e prodotti informatici |
| IT201700019122A1 (it) * | 2017-02-21 | 2018-08-21 | Automobili Lamborghini Spa | Metodo di stima di un parametro di assetto di un veicolo. |
| CN107600073B (zh) * | 2017-08-10 | 2019-07-05 | 同济大学 | 一种基于多源信息融合的车辆质心侧偏角估计系统及方法 |
| DE102017214030A1 (de) * | 2017-08-11 | 2019-02-14 | Robert Bosch Gmbh | Verfahren zum Bestimmen eines Reibwerts für einen Kontakt zwischen einem Reifen eines Fahrzeugs und einer Fahrbahn und Verfahren zum Steuern einer Fahrzeugfunktion eines Fahrzeugs |
| EP3531352A1 (en) * | 2018-02-21 | 2019-08-28 | Ningbo Geely Automobile Research & Development Co. Ltd. | Method for identifying slow transient variations and/or local spatial variations of a physical property in a set of data points |
| US10875540B2 (en) * | 2018-07-19 | 2020-12-29 | Beijing Voyager Technology Co., Ltd. | Ballistic estimation of vehicle data |
| CN109466558B (zh) * | 2018-10-26 | 2020-08-04 | 重庆邮电大学 | 一种基于ekf和bp神经网络的路面附着系数估计方法 |
| US11526724B2 (en) * | 2019-08-21 | 2022-12-13 | GM Global Technology Operations LLC | Virtual sensor for estimating online unmeasurable variables via successive time derivatives |
| US11702084B2 (en) * | 2019-11-25 | 2023-07-18 | The Goodyear Tire & Rubber Company | Vehicle sideslip angle estimation system and method |
| CN111391822B (zh) * | 2020-03-27 | 2022-06-24 | 吉林大学 | 一种极限工况下汽车横纵向稳定性协同控制方法 |
| CN111578931B (zh) * | 2020-05-21 | 2022-03-04 | 中国人民解放军海军航空大学 | 基于在线滚动时域估计的高动态飞行器自主姿态估计方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7499842B2 (en) * | 2005-11-18 | 2009-03-03 | Caterpillar Inc. | Process model based virtual sensor and method |
| US7787969B2 (en) * | 2007-06-15 | 2010-08-31 | Caterpillar Inc | Virtual sensor system and method |
| US8050838B2 (en) | 2008-11-24 | 2011-11-01 | GM Global Technology Operations LLC | Kinematic estimator for vehicle lateral velocity using force tables |
-
2015
- 2015-08-03 CN CN201580053535.8A patent/CN107000755B/zh not_active Expired - Fee Related
- 2015-08-03 EP EP15798551.6A patent/EP3177499B1/en active Active
- 2015-08-03 JP JP2017526773A patent/JP6573978B2/ja not_active Expired - Fee Related
- 2015-08-03 US US15/501,664 patent/US10597039B2/en active Active
- 2015-08-03 WO PCT/IB2015/055895 patent/WO2016020834A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP6573978B2 (ja) | 2019-09-11 |
| EP3177499B1 (en) | 2021-10-20 |
| CN107000755A (zh) | 2017-08-01 |
| EP3177499A1 (en) | 2017-06-14 |
| US10597039B2 (en) | 2020-03-24 |
| WO2016020834A1 (en) | 2016-02-11 |
| US20170225688A1 (en) | 2017-08-10 |
| JP2017532253A (ja) | 2017-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107000755B (zh) | 用于估计影响车辆动力学变量的方法和对应的虚拟传感器 | |
| Reina et al. | Vehicle dynamics estimation via augmented Extended Kalman Filtering | |
| Reina et al. | Vehicle parameter estimation using a model-based estimator | |
| Doumiati et al. | A method to estimate the lateral tire force and the sideslip angle of a vehicle: Experimental validation | |
| EP3115765B1 (en) | Tire sensor-based vehicle state estimation system and method | |
| Villagra et al. | A diagnosis-based approach for tire–road forces and maximum friction estimation | |
| EP2927066B1 (en) | Model-based longitudinal stiffness estimation system and method | |
| Madhusudhanan et al. | Load sensing bearing based road-tyre friction estimation considering combined tyre slip | |
| Pi et al. | Design and evaluation of sideslip angle observer for vehicle stability control | |
| CN103279675B (zh) | 轮胎-路面附着系数与轮胎侧偏角的估计方法 | |
| Zhao et al. | Development and verification of the tire/road friction estimation algorithm for antilock braking system | |
| Turnip et al. | Estimation of the wheel-ground contacttire forces using extended kalman filter | |
| Shraim et al. | Sliding mode observers for the estimation of vehicle parameters, forces and states of the center of gravity | |
| Doumiati et al. | Estimation of vehicle lateral tire-road forces: a comparison between extended and unscented Kalman filtering | |
| Doumiati et al. | An estimation process for vehicle wheel-ground contact normal forces | |
| Emirler et al. | Vehicle yaw rate estimation using a virtual sensor | |
| Jiang et al. | Real-time estimation of vehicle's lateral dynamics at inclined road employing extended kalman filter | |
| Barbosa et al. | Sensor fusion algorithm based on Extended Kalman Filter for estimation of ground vehicle dynamics | |
| Hac et al. | Estimation of vehicle roll angle and side slip for crash sensing | |
| CN112287289A (zh) | 一种面向云控智能底盘的车辆非线性状态融合估计方法 | |
| Zhang et al. | Virtual sensors design in vehicle sideslip angle and velocity of the centre of gravity estimation | |
| Sen et al. | Estimation of vehicle yaw rate and lateral motion for dynamic stability control using unscented Kalman filtering (UKF) approach | |
| Shenghui et al. | Virtual sensor for vehicle sideslip angle based on Extended Kalman Filter | |
| Lenzo et al. | A Physical-based observer for vehicle state estimation and road condition monitoring | |
| Saber et al. | Estimation of steering wheel angle and vehicle lateral state from measured lateral forces |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20210122 |