CN106463946B - 电池管理系统 - Google Patents
电池管理系统 Download PDFInfo
- Publication number
- CN106463946B CN106463946B CN201480079442.8A CN201480079442A CN106463946B CN 106463946 B CN106463946 B CN 106463946B CN 201480079442 A CN201480079442 A CN 201480079442A CN 106463946 B CN106463946 B CN 106463946B
- Authority
- CN
- China
- Prior art keywords
- battery assembly
- battery
- discharge
- self
- management system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims abstract description 160
- 230000007774 longterm Effects 0.000 claims abstract description 27
- 238000007599 discharging Methods 0.000 claims description 60
- 230000000712 assembly Effects 0.000 claims description 57
- 238000000429 assembly Methods 0.000 claims description 57
- 230000008878 coupling Effects 0.000 claims description 7
- 238000010168 coupling process Methods 0.000 claims description 7
- 238000005859 coupling reaction Methods 0.000 claims description 7
- 230000000977 initiatory effect Effects 0.000 claims description 6
- 230000004044 response Effects 0.000 claims description 3
- 230000006854 communication Effects 0.000 description 37
- 238000004891 communication Methods 0.000 description 37
- 238000012545 processing Methods 0.000 description 24
- 230000033001 locomotion Effects 0.000 description 18
- 230000007246 mechanism Effects 0.000 description 17
- 230000001960 triggered effect Effects 0.000 description 8
- 230000005611 electricity Effects 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 239000000126 substance Substances 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000005265 energy consumption Methods 0.000 description 3
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 2
- 239000002253 acid Substances 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 229910052744 lithium Inorganic materials 0.000 description 2
- 229910000625 lithium cobalt oxide Inorganic materials 0.000 description 2
- 229910001416 lithium ion Inorganic materials 0.000 description 2
- BFZPBUKRYWOWDV-UHFFFAOYSA-N lithium;oxido(oxo)cobalt Chemical compound [Li+].[O-][Co]=O BFZPBUKRYWOWDV-UHFFFAOYSA-N 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- NDVLTYZPCACLMA-UHFFFAOYSA-N silver oxide Chemical compound [O-2].[Ag+].[Ag+] NDVLTYZPCACLMA-UHFFFAOYSA-N 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- VNDYJBBGRKZCSX-UHFFFAOYSA-L zinc bromide Chemical compound Br[Zn]Br VNDYJBBGRKZCSX-UHFFFAOYSA-L 0.000 description 2
- 241000271566 Aves Species 0.000 description 1
- 241000283690 Bos taurus Species 0.000 description 1
- 241000282465 Canis Species 0.000 description 1
- 241001125840 Coryphaenidae Species 0.000 description 1
- 241000283073 Equus caballus Species 0.000 description 1
- 241000282324 Felis Species 0.000 description 1
- 241000238631 Hexapoda Species 0.000 description 1
- 241000283984 Rodentia Species 0.000 description 1
- FKNQFGJONOIPTF-UHFFFAOYSA-N Sodium cation Chemical compound [Na+] FKNQFGJONOIPTF-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- JDZCKJOXGCMJGS-UHFFFAOYSA-N [Li].[S] Chemical compound [Li].[S] JDZCKJOXGCMJGS-UHFFFAOYSA-N 0.000 description 1
- BNOODXBBXFZASF-UHFFFAOYSA-N [Na].[S] Chemical compound [Na].[S] BNOODXBBXFZASF-UHFFFAOYSA-N 0.000 description 1
- UFNRFBFHJJPDNF-UHFFFAOYSA-N [Zn].[Ce] Chemical compound [Zn].[Ce] UFNRFBFHJJPDNF-UHFFFAOYSA-N 0.000 description 1
- 238000013473 artificial intelligence Methods 0.000 description 1
- 230000007175 bidirectional communication Effects 0.000 description 1
- OJIJEKBXJYRIBZ-UHFFFAOYSA-N cadmium nickel Chemical compound [Ni].[Cd] OJIJEKBXJYRIBZ-UHFFFAOYSA-N 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- UGKDIUIOSMUOAW-UHFFFAOYSA-N iron nickel Chemical compound [Fe].[Ni] UGKDIUIOSMUOAW-UHFFFAOYSA-N 0.000 description 1
- GELKBWJHTRAYNV-UHFFFAOYSA-K lithium iron phosphate Chemical compound [Li+].[Fe+2].[O-]P([O-])([O-])=O GELKBWJHTRAYNV-UHFFFAOYSA-K 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- QELJHCBNGDEXLD-UHFFFAOYSA-N nickel zinc Chemical compound [Ni].[Zn] QELJHCBNGDEXLD-UHFFFAOYSA-N 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 150000003839 salts Chemical class 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910001923 silver oxide Inorganic materials 0.000 description 1
- 229910001415 sodium ion Inorganic materials 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 229910052720 vanadium Inorganic materials 0.000 description 1
- LEONUFNNVUYDNQ-UHFFFAOYSA-N vanadium atom Chemical compound [V] LEONUFNNVUYDNQ-UHFFFAOYSA-N 0.000 description 1
- 229940102001 zinc bromide Drugs 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0063—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries with circuits adapted for supplying loads from the battery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/44—Methods for charging or discharging
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/48—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H7/00—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions
- H02H7/18—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for batteries; for accumulators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0029—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries with safety or protection devices or circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0069—Charging or discharging for charge maintenance, battery initiation or rejuvenation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/007—Regulation of charging or discharging current or voltage
- H02J7/00712—Regulation of charging or discharging current or voltage the cycle being controlled or terminated in response to electric parameters
- H02J7/007182—Regulation of charging or discharging current or voltage the cycle being controlled or terminated in response to electric parameters in response to battery voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M2220/00—Batteries for particular applications
- H01M2220/20—Batteries in motive systems, e.g. vehicle, ship, plane
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0013—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries acting upon several batteries simultaneously or sequentially
- H02J7/0014—Circuits for equalisation of charge between batteries
- H02J7/0016—Circuits for equalisation of charge between batteries using shunting, discharge or bypass circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0013—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries acting upon several batteries simultaneously or sequentially
- H02J7/0025—Sequential battery discharge in systems with a plurality of batteries
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/007—Regulation of charging or discharging current or voltage
- H02J7/00712—Regulation of charging or discharging current or voltage the cycle being controlled or terminated in response to electric parameters
- H02J7/00714—Regulation of charging or discharging current or voltage the cycle being controlled or terminated in response to electric parameters in response to battery charging or discharging current
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Abstract
提供管理用于向物体供电的电池组件的系统、方法和装置来对电池组件进行放电,以供安全而长期的存储。当关闭所述物体电源达一定时间长度或所述电池组件处于未使用状态达阈值时间长度时,即可开启对所述电池组件的受控自放电。如果所述电池组件达到阈值电压值或在所述自放电期间再次使用所述电池,则可停止所述受控自放电。
Description
技术领域
电池组件可用于向诸如地面载具、空中载具、表面载具、水下载具以及航空器等静止物体或可移动物体供电。相比于常规电池,用于诸如无人飞行器(UAV)等可移动物体的电池组件例如可具有更高的功率、更大的放电速率、更短的使用时间以及更严格的安全标准。
背景技术
然而,如果维护不当,则电池组件可能受损。在一些情况下,如果充满之后长时间不使用,则电池组件可能具有较短的电池寿命或者甚至鼓胀或漏液。
发明内容
本发明提供管理用于向诸如无人飞行器(UAV)等物体供电的电池组件的系统、方法和装置。在一些情况下,电池组件可能被充满,但继而长时间不使用。在这种情况下,由于充满的电池组件的化学活性较高,因此电池组件可能鼓胀或漏液并从而对用户和环境造成危险。因此,为了适当地维护电池组件并延长电池寿命,需要用于控制电池组件存储电压的电池管理系统。在一些实施方式中,本发明提供可控地使电池组件放电以供长期存储的系统、方法和装置。物体的电池组件可以由电池管理系统来管理,该电池管理系统检测何时关闭物体电源,并检测自从关闭物体电源之后所经过的时间量。当该时间量超过阈值时间长度时,电池管理系统可开启电池组件的受控自放电,直到电池组件的电压达到对于长期存储而言安全的值。当在自放电期间开启物体电源时,可以停止电池组件的受控自放电。
本发明还提供对电池组件进行放电以供长期存储的系统、方法和装置,其中当电池组件处于未使用状态达阈值时间长度时,可以开启电池组件的受控自放电。如果再次使用电池或电池组件在自放电期间达到阈值电压值,则可以停止电池组件的受控自放电。
本发明的电池组件的受控自放电可通过将自放电电路电耦合至电池组件并将电池管理系统电耦合至自放电电路来实现。自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。通过控制电池组件的存储电压,可将电池组件存储在安全的存储电压下,因此可避免在长期存储期间对电池造成损坏并且可延长电池寿命。
本发明的一方面可以包括一种对用于向物体的至少一部分供电的电池组件进行放电的方法,所述方法包括:检测何时关闭物体电源;借助于定时器,检测自从关闭物体电源之后所经过的时间量;以及当时间量超过阈值时间长度时,开启电池组件的受控自放电。
在一些实施方式中,所述方法还可包括在电池组件的受控自放电期间检测电池组件的电压,并且当电压达到阈值电压值时停止电池组件的受控自放电。在一些情况下,阈值电压值可约为电池组件的标称电压的50%。例如,阈值电压值约为38V。阈值电压可被配置成允许电池组件的安全长期存储。在一些实施方式中,所述方法还可包括在停止电池组件的受控自放电之后进入休眠模式。
在一些实施方式中,所述方法还可包括检测何时开启物体电源,并且当开启物体电源时停止电池组件的受控自放电。或者,所述方法还可包括检测电池组件是否向物体的至少一部分供电,并且如果电池组件向物体的至少一部分供电,则停止电池组件的受控自放电。
在一些实施方式中,电池组件的受控自放电可由电耦合至电池组件的自放电电路来执行。在一些情况下,自放电电路包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。当控制开关切换至闭合状态时,可以开启受控自放电,且当控制开关切换至断开状态时,可以停止受控自放电。
在一些实施方式中,电池组件可包含多个电芯。或者,电池组件可仅包含单一电芯。在一些实施方式中,物体可以是可移动物体,诸如无人飞行器(UAV)。在一些情况下,电池组件可机载在无人飞行器上。在一些实施方式中,电池组件可用于向无人飞行器的推进系统供电。电池组件可位于物体的外壳内。
在一些实施方式中,阈值时间长度可为至少一至十天。在一些情况下,阈值时间长度可以是预定的。或者,阈值时间长度可以是基于用户输入而设定的。
本发明的方面还可包括一种对用于向物体的至少一部分供电的电池组件进行放电的设备,所述设备包含:定时器,其被配置用于:(1)当关闭物体电源时接收信号并开始计时以作为对该信号的响应,以及(2)检测自从关闭物体电源之后所经过的时间量;以及一个或多个处理器,其单独地或共同地被配置用于:(1)从定时器接收指示所经过的时间量的信号,以及(2)当所经过的时间量超过阈值时间长度时生成开启电池组件的受控自放电的信号。
在一些实施方式中,一个或多个处理器还可单独地或共同地被配置用于在电池组件的受控自放电期间接收指示电池组件电压的信号,并且当电压达到阈值电压值时生成停止电池组件的受控自放电的信号。在一些情况下,阈值电压值可约为电池组件的标称电压的50%。例如,阈值电压值可约为38V。阈值电压值被配置成允许电池组件的安全长期存储。在一些实施方式中,一个或多个处理器还可单独地或共同地被配置用于在停止电池组件的受控自放电之后生成使电池组件进入休眠模式的信号。
在一些实施方式中,一个或多个处理器还可单独地或共同地被配置用于接收指示何时开启物体电源的信号,并且当开启物体电源时生成停止电池组件的受控自放电的信号。或者,一个或多个处理器还可单独地或共同地被配置用于接收指示电池组件向物体的至少一部分供电的信号,并且如果电池组件向物体的至少一部分供电,则生成停止电池组件的受控自放电的信号。
在一些实施方式中,所述设备还可包含电耦合至电池组件的自放电电路。在一些情况下,自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。当控制开关切换至闭合状态时,可以开启受控自放电,且当控制开关切换至断开状态时,可以停止受控自放电。
在一些实施方式中,电池组件可包含多个电芯。或者,电池组件可仅包含单一电芯。在一些情况下,物体可以是可移动物体,诸如无人飞行器(UAV)。在一些实施方式中,电池组件可机载在无人飞行器上。电池组件可用于向无人飞行器的推进系统供电。在一些情况下,电池组件可位于物体的外壳内。
在一些实施方式中,阈值时间长度可为至少一至十天。在一些情况下,阈值时间长度可以是预定的。或者,阈值时间长度可以是基于用户输入而设定的。
本发明的方面还可包括一种无人飞行器,其包含电池组件和如上文所述可操作地耦合至电池组件的设备。
根据本发明的另一方面,可提供一种对电池组件进行放电的方法。所述方法可包括:借助于定时器,检测电池组件何时处于未使用状态达阈值时间长度;当电池组件处于未使用状态达阈值时间长度时,开启电池组件的受控自放电;以及当(1)电池组件处于使用状态,或(2)电池组件的电压达到阈值电压值时,停止电池组件的受控自放电。
在一些实施方式中,阈值电压值可约为电池组件的标称电压的50%。例如,阈值电压值可约为38V。阈值电压可被配置成允许电池组件的安全长期存储。
在一些实施方式中,所述方法还可包括在当电池组件电压达到阈值电压值时,在停止电池组件的受控自放电之后进入休眠模式。
在一些实施方式中,电池组件的受控自放电可由电耦合至电池组件的自放电电路来执行。在一些情况下,自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。当控制开关切换至闭合状态时,可以开启受控自放电,且当控制开关切换至断开状态时,可以停止受控自放电。
在一些实施方式中,电池组件可包含多个电芯。或者,电池组件可仅包含单一电芯。在一些实施方式中,物体可以是可移动物体,诸如无人飞行器(UAV)。在一些情况下,电池组件可机载在无人飞行器上。电池组件可用于向无人飞行器的推进系统供电。在一些情况下,电池组件可位于物体的外壳内。
在一些实施方式中,阈值时间长度可为至少一至十天。在一些情况下,阈值时间长度可以是预定的。或者,阈值时间长度可以是基于用户输入而设定的。
根据本发明的另一方面,可提供一种对用于向物体的至少一部分供电的电池组件进行放电的设备。所述装置可包含:定时器,其被配置用于检测电池组件处于未使用状态的时间量;和一个或多个处理器,其单独地或共同地被配置用于:从定时器接收指示时间量的信号,当时间量超过阈值时间长度时生成开启电池组件的受控自放电的信号,且当(1)电池组件处于使用状态,或(2)电池组件电压达到阈值电压值时生成停止电池组件的受控自放电的信号。
在一些实施方式中,阈值电压值约为电池组件的标称电压的50%。例如,阈值电压值可约为38V。阈值电压可被配置成允许电池组件的安全长期存储。
在一些实施方式中,一个或多个处理器还可单独地或共同地被配置用于当电池组件电压达到阈值电压值时,在停止电池组件的受控自放电之后,生成使电池组件进入休眠模式的信号。
在一些实施方式中,所述设备还可包含电耦合至电池组件的自放电电路。在一些情况下,自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。当控制开关切换至闭合状态时,可以开启受控自放电,且当控制开关切换至断开状态时,可以停止受控自放电。
在一些实施方式中,电池组件可包含多个电芯。或者,电池组件可仅包含单一电芯。在一些实施方式中,物体可以是可移动物体,诸如无人飞行器(UAV)。在一些情况下,电池组件可机载在无人飞行器上。例如,电池组件用于向无人飞行器的推进系统供电。在一些情况下,电池组件可位于物体的外壳内。
在一些实施方式中,阈值时间长度可为至少一至十天。在一些情况下,阈值时间长度可以是预定的。或者,阈值时间长度可以是基于用户输入而设定的。
本发明的方面还可包括一种无人飞行器,其包含电池组件和如上文所述的设备。
根据本发明的另一方面,可提供一种用于管理电池组件放电的设备。所述设备可包含:电池组件,其包含一个或多个电芯;自放电电路,其电耦合至所述电池组件;以及电池管理系统,其被配置用于控制自放电电路的操作,以便允许电池组件的受控自放电,其中电池管理系统被配置用于当定时器超过阈值时间长度时,使电池组件通过自放电电路进行放电。
在一些实施方式中,电池组件可包含正极端子和负极端子,且其中自放电电路可包含与正极端子和负极端子并联连接的自放电电阻和控制开关。在一些情况下,电池管理系统可控制控制开关的操作。当控制开关切换至闭合状态时,可以发生受控自放电,且其中当控制开关切换至断开状态时,可以不发生受控自放电。
在一些实施方式中,当电池组件的电压达到阈值电压值时,电池管理系统可使电池组件停止通过自放电电路进行放电。在一些情况下,阈值电压值可约为电池组件的标称电压的50%。例如,阈值电压值可约为38V。阈值电压可被配置成允许电池组件的安全长期存储。
在一些实施方式中,当一个或多个电芯的平均电压达到阈值电压值时,电池管理系统可使电池组件停止通过自放电电路进行放电。在一些情况下,阈值电压值可约为电芯的标称电压的50%。例如,阈值电压值可约为3.8V。阈值电压可被配置成允许电池组件的安全长期存储。
在一些实施方式中,电池组件可用于向物体的至少一部分供电。在一些情况下,物体可以是可移动物体,诸如无人飞行器(UAV)。在一些情况下,电池组件可机载在无人飞行器上。电池组件可用于向无人飞行器的推进系统供电。
在一些实施方式中,电池管理系统可被配置用于当电池管理系统检测到关闭物体电源时开启定时器。
在一些实施方式中,电池管理系统可被配置用于当电池组件正在向物体的至少一部分供电时,使电池组件停止通过自放电电路进行放电。在一些情况下,电池管理系统可包含定时器。
在一些实施方式中,可在外壳内提供电池组件、自放电电路和电池管理系统。在一些实施方式中,阈值时间长度可为至少一至十天。在一些情况下,阈值时间长度可以是预定的。或者,阈值时间长度可以是基于用户输入而设定的。
根据本发明的另一方面,可提供一种用于管理电池组件放电的方法。所述方法可包括:提供如上文所述的设备;以及在电池管理系统处接收使定时器开始计时的信号。
在一些实施方式中,信号可指示电池组件处于未使用状态。在一些实施方式中,电池组件可向物体的至少一部分供电,且其中信号可指示关闭物体电源。或者,电池组件可向物体的至少一部分供电,且其中信号可指示电池组件未电耦合至物体。
本发明的方面还可包括一种无人飞行器,其包含如上文所述的设备。
根据本发明的另一方面,可提供一种用于组装用于管理电池组件放电的设备的方法。所述方法可包括:提供包含一个或多个电芯的电池组件;将自放电电路电耦合至电池组件;以及将电池管理系统电耦合至自放电电路,其中电池管理系统被配置用于控制自放电电路的操作,以便允许电池组件的受控自放电,且其中电池管理系统被配置用于当定时器超过阈值时间长度时,使电池组件通过自放电电路进行放电。
在一些实施方式中,电池组件可包含正极端子和负极端子,且其中自放电电路可包含与正极端子和负极端子并联连接的自放电电阻和控制开关。在一些情况下,电池管理系统可控制控制开关的操作。例如,当控制开关切换至闭合状态时,可以发生受控自放电,且其中当控制开关切换至断开状态时,可以不发生受控自放电。在一些实施方式中,当电池组件的电压达到阈值电压值时,电池管理系统可使电池组件停止通过自放电电路进行放电。
在一些实施方式中,阈值电压值可约为电池组件的标称电压的50%。例如,阈值电压值可约为38V。或者,当一个或多个电芯的平均电压达到阈值电压值时,电池管理系统可使电池组件停止通过自放电电路进行放电。在一些情况下,阈值电压值可约为电芯的标称电压的50%。例如,阈值电压值可约为3.8V。阈值电压值被配置成允许电池组件的安全长期存储。
在一些实施方式中,电池组件可用于向物体的至少一部分供电。在一些情况下,物体可以是可移动物体,诸如无人飞行器(UAV)。电池组件可机载在无人飞行器上。在一些情况下,电池组件可用于向无人飞行器的推进系统供电。
在一些实施方式中,电池管理系统可被配置用于当电池管理系统检测到关闭物体电源时开启定时器。在一些情况下,电池管理系统可被配置用于当电池组件正在向物体的至少一部分供电时,使电池组件停止通过自放电电路进行放电。
在一些实施方式中,电池管理系统可包含定时器。在一些情况下,可在外壳内提供电池组件、自放电电路和电池管理系统。在一些情况下,阈值时间长度可为至少一至十天。阈值时间长度可以是预定的。或者,阈值时间长度可以是基于用户输入而设定的。
根据本发明的另一方面,可提供一种对用于向物体的至少一部分供电的电池组件进行放电的方法。所述方法可包括:从多个电池组件中辨别符合特定自放电准则的一个或多个电池组件;以及开启符合特定自放电准则的一个或多个电池组件的受控自放电。
在一些实施方式中,特定自放电准则可以是自从关闭物体电源之后所经过的时间量超过阈值时间长度。在一些情况下,所述方法还可包括检测何时关闭向物体电源;以及借助于定时器,检测自从关闭物体电源之后所经过的时间量。在一些情况下,所述方法还可包括在一个或多个电池组件的受控自放电期间检测一个或多个电池组件的电压。在一些情况下,所述方法还可包括当电压达到阈值电压值时停止相应一个或多个电池组件的受控自放电。
在一些实施方式中,所述方法还可包括检测何时开启物体电源。在一些情况下,所述方法还可包括当开启物体电源时停止电池组件的受控自放电。在一些情况下,所述方法还可包括检测一个或多个电池组件是否向物体的至少一部分供电。在一些情况下,所述方法还可包括如果电池组件向物体的至少一部分供电,则停止一个或多个电池组件的受控自放电。
在备选的实施方式中,特定自放电准则可以是一个或多个电池组件处于未使用状态达阈值时间长度。在一些情况下,所述方法还可包括借助于定时器来检测一个或多个电池组件何时处于未使用状态达阈值时间长度。在一些情况下,所述方法还可包括当(1)一个或多个电池组件处于使用状态,或(2)一个或多个电池组件的电压达到阈值电压值时停止一个或多个电池组件的受控自放电。
在一些情况下,一个或多个电池组件的受控自放电可由分别电耦合至一个或多个电池组件的自放电电路来执行。在一些情况下,自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。在一些情况下,当控制开关切换至闭合状态时,可以开启受控自放电,且当控制开关切换至断开状态时,可以停止受控自放电。
在一些实施方式中,物体可以是可移动物体。可移动物体可以是无人飞行器(UAV),且多个电池组件可机载在无人飞行器上。在一些情况下,多个电池组件可用于向无人飞行器的不同部件供电。
根据本发明的另一方面,可提供一种用于管理多个电池组件放电的设备。所述设备可包含:多个电池组件,其各自包含一个或多个电芯;自放电电路,其电耦合至多个电池组件中的每个电池组件;以及电池管理系统,其被配置用于控制各自的自放电电路的操作,以便允许多个电池组件中的每个电池组件的受控自放电,其中电池管理系统被配置用于当一个或多个电池组件符合特定自放电准则时,使一个或多个电池组件通过各自的自放电电路进行放电。
在一些实施方式中,特定自放电准则可以是自从关闭物体电源之后所经过的的时间量超过阈值时间长度。或者,特定自放电准则可以是一个或多个电池组件处于未使用状态达阈值时间长度。
在一些实施方式中,各自的自放电电路可各自包含与正极端子和负极端子并联连接的自放电电阻和控制开关。在一些情况下,电池管理系统可控制控制开关的操作。在一些情况下,当控制开关切换至闭合状态时,可以发生受控自放电,且其中当控制开关切换至断开状态时,可以不发生受控自放电。
在一些实施方式中,电池管理系统可被配置用于当一个或多个电池组件的电压达到阈值电压值时,使一个或多个电池组件停止通过各自的自放电电路进行放电。在一些情况下,多个电池组件可用于向物体的至少一部分供电。例如,物体可以是可移动物体,诸如无人飞行器(UAV)。在一些情况下,多个电池组件可机载在无人飞行器上。多个电池组件可用于向无人飞行器的不同部件供电。
在一些实施方式中,电池管理系统可被配置用于当一个或多个电池组件正在向物体的至少一部分供电时,使一个或多个电池组件停止通过各自的自放电电路进行放电。在一些情况下,电池管理系统可被配置用于当电池组件处于使用状态时,使电池组件停止通过自放电电路进行放电。
本发明的方面还可包括一种无人飞行器,其包含如上文所述的设备。
应了解,本发明的不同方面可以单独地、共同地或彼此结合地来理解。本文所述的本发明的各个方面可适用于下文阐述的任何特定应用或适用于任何其他类型的可移动物体。本文关于诸如无人飞行器(UAV)等飞行器的任何描述均可适用于且用于任何可移动物体,诸如任何载具。另外,本文在空中运动(例如,飞行)的情形下公开的系统、装置和方法也可以适用于其他类型运动的情形,诸如在地面上或在水上的移动、水下运动或在太空中的运动。
通过考察说明书、权利要求书和附图,本发明的其他目标和特征将变得显而易见。
援引并入
本说明书提到的所有公布、专利和专利申请都以引用的方式并入本文中,其引用程度就如同特定地且单独地指定将每个单独的公布、专利或专利申请以引用的方式并入本文中一般。
附图说明
本发明的新颖性特征已特别在随附的权利要求书中阐明。通过参考阐述说明性实施方式的下文具体实施方式,将对本发明的特征和优势获得更佳的理解,其中利用了本发明的原理,且附图如下:
图1是说明一种根据本发明实施方式对电池组件进行放电的方法的流程图。
图2是说明一种根据本发明另一实施方式对电池组件进行放电的方法的流程图。
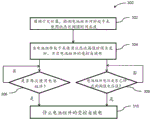
图3是说明一种根据本发明又一实施方式对电池组件进行放电的方法的流程图。
图4示出一种根据本发明实施方式用于管理电池组件放电的设备。
图5是说明一种根据本发明实施方式组装用于管理电池组件放电的设备的方法的流程图。
图6是说明根据本发明实施方式的电池组件的电压变化的图表。
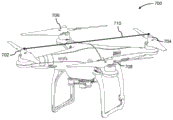
图7说明根据本发明实施方式的无人飞行器的外观。
图8说明根据本发明实施方式的包括载体和有效载荷的可移动物体。
图9是根据本发明的实施方式,通过框图对用于控制可移动物体的系统进行的示意性说明。
具体实施方式
本文所述的系统、方法和装置提供用于减少或防止电池组件在长期存储期间损坏的有效方法。当电池组件被充满但继而长时间不使用时,电池寿命可能由于电池损坏而缩短,例如,因为充满的电池组件的化学活性较高,因此电池可能鼓胀或漏液。为了防止这类情况发生,电池组件可以由电池管理系统来管理,该电池管理系统可监控和控制电池组件的存储电压。在一些实施方式中,电池组件用于向物体(例如,可移动物体,诸如无人飞行器(UAV))供电。电池管理系统可检测何时关闭物体电源,并检测自从关闭物体电源之后所经过的时间量。当该时间量超过阈值时间长度时,电池管理系统可开启对电池组件的受控自放电,直到电池组件的电压达到对于长期存储而言安全的值。在一些实施方式中,如果在自放电期间开启物体电源,则可以停止电池组件的受控自放电。
在一些实施方式中,当电池组件处于未使用状态达阈值时间长度时,本发明的系统、方法和装置可以开启电池组件的受控自放电。如果再次使用电池或电池组件在自放电期间达到阈值电压值,则可以停止电池组件的受控自放电。
在本文所述的系统、方法和装置中,电池组件的自放电可以通过电耦合至电池组件的自放电电路来实现。自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。当控制开关切换至闭合状态时(例如,开关为“ON”),可以开启受控自放电,且当控制开关切换至断开状态时(例如,开关为“OFF”)时,可以停止受控自放电。
有利的是,本文提供的系统、方法和装置使得电池组件在长期存储期间能够进行自动的受控自放电,从而改进此类电池组件的使用寿命、安全性和易用性。
本发明的电池组件可适于向物体供电,该物体可以是可移动物体或静止物体。可移动物体能够自推进移动(例如,载具),而静止物体可能无法自推进移动。电池组件可以向物体的至少一部分,诸如物体的一个或多个电气部件供电。可由电池组件供电的电气部件的示例包括但不限于推进系统(例如,旋翼、轮子)、传感器(例如,GPS传感器、惯性传感器、相机、超声传感器、红外传感器、激光雷达、雷达)、控制系统、通信系统(例如,接收器、发射器、收发器、用户接口)、等。
在一些实施方式中,可移动物体可以是无人飞行器(UAV)。无人飞行器可具有一个或多个可允许该无人飞行器在空中四处移动的推进单元。无人飞行器可以是旋翼飞机。在一些情况下,无人飞行器可以是可包括多个旋翼的多旋翼飞行器。所述多个旋翼能够旋转以便为无人飞行器生成提升力,使得无人飞行器能够在空中自由移动(例如,多达三个平移自由度和/或多达三个旋转自由度)。在一些实施方式中,电池组件可机载在无人飞行器上。电池组件可用于向无人飞行器的推进系统,例如无人飞行器的旋翼供电。或者,电池组件可用于向无人飞行器上机载的其他电气部件供电,包括但不限于控制系统(例如,飞行控制器)、传感器、通信系统、有效载荷(例如,相机、云台)等。下文进一步详细地提供了适于与本发明的实施方式一起使用的可移动物体的附加示例。
物体可以由任何合适数量和组合的电池组件来供电。在一些实施方式中,物体仅包括单一电池组件。在其他实施方式中,物体包括多个电池组件,诸如两个、三个、四个、五个或更多个电池组件。电池组件可视需要而布置在物体上。例如,电池组件可位于物体内部(例如,位于物体的内部空腔中和/或附着至物体的内表面)或位于物体的外部(例如,位于物体的外表面上,诸如顶部、底部、前面、后面或侧面)。在一些实施方式中,可在物体的外壳内提供电池组件。或者,可在物体的外壳外提供电池组件。
本发明的电池组件可电耦合至物体的至少一部分,例如通过诸如电线、线缆、销、触件等电连接装置。在一些实施方式中,电池组件可移除地耦合至物体,使得电池可从该物体上移除,例如以供充电、替换等。在备选的实施方式中,电池组件永久地固定至物体且无法从物体移除。
在一些实施方式中,电池组件可包含多个电芯。所述多个电芯可串联地或并联地电连接。或者,电池组件可仅包含单一电芯。电池组件的电芯可包含在电池组件的外壳之内,使得以单一整体装置的形式提供电池组件,从而便于操作电池组件。
电池组件可以是适于安装在物体上或物体内的任何类型的、合适的电池组件,以便向该物体的一个或多个电气部件供电。在一些实施方式中,电池组件是不可充电电池或一次电池。在其他实施方式中,电池组件可以是可充电电池或二次电池。适于与本文所述的实施方式一起使用的电池组件类型的示例包括但不限于:铅酸电池、碱性电池、镍铁电池、镍镉电池、镍氢电池、镍-金属氢化物电池、镍锌电池、锂空气(有机)电池、锂钴氧化物电池、锂离子聚合物电池、磷酸铁锂电池、锂硫电池、钛酸锂电池、钠离子电池、薄膜锂电池、溴化锌电池、锌铈电池、钒氧化还原电池、钠硫电池、熔盐电池、氧化银电池或量子电池(氧化物半导体)。在一些实施方式中,电池组件可以是钴酸锂电池。
电池组件可向物体上机载的一个或多个电气部件提供电压,在本文中也称为“输出电压”。在一些情况下,电池组件可提供大于或等于约0.01V、0.05V、0.1V、0.5V、1.0V、1.5V、2.0V、2.5V、3.0V、3.5V、4.0V、4.5V、5.0V、5.5V、6.0V、6.5V、7.0V、7.5V、8.0V、8.5V、9.0V、9.5V、10V、15V、20V、25V、30V、35V、40V、45V、50V、55V、60V、65V、70V、75V、80V、85V、90V、95V或100V的输出电压。可选地,电池组件的输出电压可小于或等于本文所述的任何值。在一些实施方式中,电池组件的最大输出电压约为0.01V、0.05V、0.1V、0.5V、1.0V、1.5V、2.0V、2.5V、3.0V、3.5V、4.0V、4.5V、5.0V、5.5V、6.0V、6.5V、7.0V、7.5V、8.0V、8.5V、9.0V、9.5V、10V、15V、20V、25V、30V、35V、40V、45V、50V、55V、60V、65V、70V、75V、80V、85V、90V、95V或100V。在一些实施方式中,电池组件的最小输出电压约为0.01V、0.05V、0.1V、0.5V、1.0V、1.5V、2.0V、2.5V、3.0V、3.5V、4.0V、4.5V、5.0V、5.5V、6.0V、6.5V、7.0V、7.5V、8.0V、8.5V、9.0V、9.5V、10V、12V、14V、16V、18V、20V、22V、24V、26V、28V、30V、35V、40V、45V、50V、55V、60V、65V、70V、75V、80V、85V、90V、95V或100V。电池组件的最大和/或最小输出电压可落在本文所述的任何两个值之间的范围内。在一些实施方式中,电池组件的输出电压可以是12.6V、17.4V、25.2V或26.1V。
电池组件以额定电压可传递的电荷量在本文中可称为电池组件的“容量”。电池组件可具有大于或等于约10mAh、50mAh、100mAh、200mAh、400mAh、600mAh、800mAh、1,000mAh、1,200mAh、1,400mAh、1,600mAh、1,800mAh、2,000mAh、2,200mAh、2,400mAh、2,600mAh、2,800mAh、3,000mAh、3,500mAh、4,000mAh、4,500mAh、5,000mAh、6,000mAh、7,000mAh、8,000mAh、9,000mAh、10,000mAh或20,000mAh的容量。可选地,电池组件的容量可小于或等于本文所述的任何值。电池组件的容量可落在本文所述的任何两个值之间的范围内。在一些实施方式中,电池组件的容量可以是4480mAh、4500mAh、5200mAh或5700mAh。
可充电电池组件可多次充电和放电。在电池无法符合特定性能之前可能经历的放电-充电循环的次数在本文中可称为电池组件的“充电循环次数”。电池组件可具有大于或等于约5次、10次、50次、100次、150次、200次、150次、300次、350次、400次、450次、500次、600次、700次、800次、900次、1,000次、1,200次、1,400次、1,600次、1,800次、2,000次、2,200次、2,400次、2,600次、2,800次、3,000次、3,400次、3,800次、4,000次、4,500次、5,000次、6,000次、7,000次、8,000次、10,000次、20,000次、30,000次、40,000次、50,000次、60,000次、70,000次、80,000次、90,000次或100,000次的充电循环次数。可选地,电池组件的充电循环可小于或等于本文所述的任何值。电池组件的充电循环可落在本文所述的任何两个值之间的范围内。在一些实施方式中,电池组件的充电循环次数可以是200次。
电池组件的寿命指示在可充电电池组件的一次完全充满后,装置可工作多长时间。电池组件可具有大于或等于1s、20s、40s、1min、5min、10min、15min、20min、25min、30min、35min、40min、45min、50min、55min、1.0h、1.2h、1.4h、1.6h、1.8h、2.0h、2.5h、3.0h、3.5h、4.0h、4.5h、5.0h、5.5h、6.0h、6.5h、7.0h、8h、9h或10h的寿命。可选地,电池组件的寿命可小于或等于本文所述的任何值。电池组件的寿命可落在本文所述的任何两个值之间的范围内。在一些实施方式中,电池组件的寿命可以是20min。
电池组件的放电速率指示在达到截止电压之前,电池组件以特定电流可放电多少小时。在15A的电流下,电池组件可具有大于或等于约0.1h、0.2h、0.4h、0.6h、0.8h、1.0h、1.5h、2.0h、2.5h、3.0h、3.5h、4.0h、4.5h、5.0h、5.5h、6.0h、6.5h、7.0h、7.5h、8.0h、8.5h、9.0h、9.5h、10.0h、10.5h、11.0h、11.5h、12.0h、12.5h、13.0h、13.5h、14.0h、14.5h、15.0h、15.5h、16.0h、16.5h、17.0h、17.5h、18.0h、18.5h、19.0h、19.5h、20.0h、20.5h、21.0h、21.5h、22.0h、22.5h、23.0h、23.5h、24.0h、24.5h、25.0h、30.0h、35.0h或40.0h的放电速率。可选地,电池组件的放电速率可小于或等于本文所述的任何值。在一些实施方式中,在15A的电流下,电池组件具有约等于0.1h、0.2h、0.4h、0.6h、0.8h、1.0h、1.5h、2.0h、2.5h、3.0h、3.5h、4.0h、4.5h、5.0h、5.5h、6.0h、6.5h、7.0h、7.5h、8.0h、8.5h、9.0h、9.5h、10.0h、10.5h、11.0h、11.5h、12.0h、12.5h、13.0h、13.5h、14.0h、14.5h、15.0h、15.5h、16.0h、16.5h、17.0h、17.5h、18.0h、18.5h、19.0h、19.5h、20.0h、20.5h、21.0h、21.5h、22.0h、22.5h、23.0h、23.5h、24.0h、24.5h、25.0h、30.0h、35.0h或40.0h的最大放电速率。在一些实施方式中,电池组件具有约等于0.1h、0.2h、0.4h、0.6h、0.8h、1.0h、1.5h、2.0h、2.5h、3.0h、3.5h、4.0h、4.5h、5.0h、5.5h、6.0h、6.5h、7.0h、7.5h、8.0h、8.5h、9.0h、9.5h、10.0h、10.5h、11.0h、11.5h、12.0h、12.5h、13.0h、13.5h、14.0h、14.5h、15.0h、15.5h、16.0h、16.5h、17.0h、17.5h、18.0h、18.5h、19.0h、19.5h、20.0h、20.5h、21.0h、21.5h、22.0h、22.5h、23.0h、23.5h、24.0h、24.5h、25.0h、30.0h、35.0h或40.0h的最小放电速率。电池组件可具有落在本文所述的任何两个值之间的范围内的最大和/或最小放电速率。在一些实施方式中,在15A的电流下,电池组件的放电速率为20min。
如本文先前所述,在一些实施方式中,当使电池组件长时间储存在部分或完全充满的状态下时,可能发生电池损坏,例如,由于电芯的化学反应。如果储存电池的时间段大于或等于约1h、2h、5h、10h、15h、20h、1天、2天、5天、10天、20天、50天、100天、200天、1年或5年,则可能发生损坏。在一些实施方式中,如果以大于或等于电池组件的最大充电水平的约10%、20%、30%、40%、50%、60%、70%、80%、90%或100%储存电池组件,则可能发生损坏。
因此,为了避免对电池组件造成损坏,本发明的一些实施方式提供监控一个或多个电池组件的状态以及评估是否应该对所述一个或多个电池组件进行放电(例如,由于长时间不使用而对其进行放电)的方法。本文提出的方法可以完全自动地执行,以使得无需用户输入即可开启自放电过程。
非受控自放电可以是发生在电池或电池组件中的自然现象,其中内部的化学反应使电池或电池组件的储存电荷减少,而无需电极之间的任何连接。非受控自放电的速度可取决于电池的类型、充电的状态、充电电流、环境温度以及其他因素。在可充电电池中,锂离子电池每月可吸收最少量的自放电,即约2-3%的放电量,接着是铅酸电池,吸收4-6%的放电量。然而,受控自放电可以是用户有意执行的电池或电池组件的放电,以使得电池或电池组件的电压可降至安全值。执行受控自放电的目的可以是减小或防止对电池或电池组件造成损坏,否则由于电池或电池组件内部较高的化学活性,可能发生损坏。
电池或电池组件的受控自放电可由电池或电池组件自身来执行。例如,自放电电路和电池管理系统可以是电池或电池组件的一部分。是否要开启或停止自放电可以由电池管理系统来确定,而自放电可以由自放电电路来执行。或者,电池或电池组件的受控自放电可以由电池或电池组件向其供电的物体(诸如无人飞行器)来执行。例如,是否要开启或停止自放电可以由无人飞行器上机载的部件来确定。
图1是说明一种根据本发明实施方式对电池组件进行放电的方法100的流程图。方法100可用于对物体的电池组件进行放电,该物体例如可移动物体,如无人飞行器。方法100的一些或全部步骤可以由可操作地耦合至电池组件的一个或多个处理器来执行。
在方法100的步骤102中,检测何时关闭物体电源。可以通过接收来自物体的主开关的信号来检测电源的关闭,所述信号指示物体电源被关闭。或者,可以通过确定基本上没有电流正在从电池组件流向物体的部件来检测电源的关闭。
在步骤104中,检测自从关闭物体电源之后所经过的时间量。在一些实施方式中,所经过的时间可以由定时器来测量,该定时器通过在步骤102中检测到关闭物体电源来触发。例如,在检测到关闭物体电源时,一个或多个处理器可生成并向定时器传输信号,以开启计时过程。
在步骤106中,将自从关闭物体电源之后所经过的时间量与阈值时间长度相比较,以确定所述时间量是否超过阈值时间长度。在一些实施方式中,可以通过将定时器的值与时间长度阈值相比较来进行此确定。
在一些情况下,阈值时间长度可以是基于用户输入而设定的。例如,用户例如可以通过考虑电池类型、电池容量和/或电池存储时间等来确定并输入阈值时间长度。或者,阈值时间长度可以是预定的,例如存储在与一个或多个处理器相关联的存储器中。例如,预定的时间长度阈值可小于或等于约:1s、10s、30s、1min、10min、20min、30min、40min、50min、1h、2h、5h、10h、15h、20h、1天、2天、3天、4天、5天、6天、7天、8天、9天、10天、11天、12天、13天、14天或15天。预定的时间长度阈值可具有大于或等于本文所述的任何值的值。预定的时间长度阈值可具有落在本文所述的任何两个值之间的范围内的值。可选地,阈值时间长度可由一个或多个处理器自动确定,例如通过读取诸如电池类型、电池容量、电池电压等电池信息来确定。在一些情况下,阈值时间长度可以为约一至十天。
如果步骤106中的确定示出所述时间量未超过阈值时间长度,则所述方法过程返回至步骤104。在一些实施方式中,该方法可按每1s、10s、30s、1min、15min、30min、45min、1h、2h、5h、10h、15h、20h、1天、2天、3天、4天或5天的频率执行步骤106的检查。用以检查步骤106的频率可具有大于或等于本文所述的任何值的值。用以检查步骤106的频率可具有落在本文所述的任何两个值之间的范围内的值。在一些情况下,该方法可每1小时执行一次步骤106的检查。
如果步骤106中的确定示出所述时间量超过阈值时间长度,则在步骤108中,可以开启对电池组件的受控自放电。在一些实施方式中,受控自放电可以由电耦合至电池组件的自放电电路来实现。本文进一步详细地提供自放电电路的示例。
可选地,根据图1的实施方式,对电池组件进行放电的方法还可在步骤108之后包括一个步骤,在该步骤中可检测何时开启物体电源。例如,如果用户再次接通系统开关,则可检测为在受控自放电期间开启物体电源。当开启物体电源时,根据图1的实施方式的对电池组件进行放电的方法还可包括停止电池组件的受控自放电的步骤。
或者,根据图1的实施方式的对电池组件进行放电的方法还可在步骤108之后包括一个步骤,在该步骤中可检测电池组件是否向物体的至少一部分供电。例如,如果用户再次接通系统开关,则可在受控自放电期间检测从电池组件流向需要供电的部件的电流。当电池组件向物体的至少一部分供电时,例如,电流从电池组件流出,根据图1的实施方式的对电池组件进行放电的方法还可包括停止电池组件的受控自放电的步骤。
图2是说明一种根据本发明另一实施方式对电池组件进行放电的方法200的流程图。方法200可用于对物体的电池组件进行放电,该物体例如包括无人飞行器的可移动物体。方法200的一些或全部步骤可以由可操作地耦合至电池组件的一个或多个处理器来执行。
步骤202至208可基本上与如上文参考图1所论述的步骤102至108相同。例如,在步骤202中,检测何时关闭物体电源;在步骤204中,检测自从关闭物体电源之后所经过的时间量;而且如果步骤206中的确定示出所述时间量超过阈值时间长度,则在步骤208中开启对电池组件的受控自放电。
根据图2的实施方式的对电池组件进行放电的方法还可包括步骤210,其中在受控自放电期间检测电池组件的电压。在步骤212中,通过将电池组件的电压与阈值电压值做比较,确定电池组件的电压是否已达到阈值电压值。
阈值电压值可以是适当的电压值,在该电压值下可以长期安全地存储电池组件。例如,即使电池组件长期存储在该阈值电压下,该电池组件也不可能鼓胀或漏液而且电池组件的寿命也不可能缩短。在一些情况下,电池组件存储的长期存储期可大于或等于约1min、10min、20min、30min、40min、50min、1h、5h、10h、15h、20h、1天、5天、10天、15天、1个月、2个月、4个月、6个月、8个月、10个月、1年、2年、4年、6年、8年或10年。可选地,长期存储期可小于或等于本文所述的任何值。长期存储期可具有落在本文所述的任何两个值之间的范围内的值。
在一些情况下,阈值电压值可以是小于或等于约0.01V、0.02V、0.04V、0.06V、0.08V、0.1V、0.2V、0.4V、0.6V、0.8V、1.0V、1.2V、1.4V、1.6V、1.8V、2.0V、2.2V、2.4V、2.6V、2.8V、3.0V、3.2V、3.4V、3.6V、3.8V、4.0V、4.2V、4.4V、4.6V、4.8V、5.0V、5.5V、6.0V、6.5V、7.0V、7.5V、8.0V、8.5V、9.0V、9.5V、10V、15V、20V、25V、30V、40V、50V或60V的电压。可选地,阈值电压值可大于或等于本文所述的任何值。阈值电压值可具有落在本文所述的任何两个值之间的范围内的值。在一些实施方式中,阈值电压值可约为电池组件的标称电压的50%。例如,对于10个电芯的电池组件而言,阈值电压值可约为38V,每个电芯具有7.6V的标称电压。术语“标称电压”在本文中可用来指示电芯或电池的报道电压或参考电压。
在备选的实施方式中,步骤210中在电池组件的受控自放电期间检测电池组件的电压可包括检测电池组件的多个电芯的平均电压。例如,电池组件可由10个电芯组成,每个电芯具有7.6V的标称电压。步骤210中检测电池组件的电压可因此包括检测10个电芯的平均电压。在该实施例中,阈值电压值可被设定为一个电芯的标称电压的约50%,即,3.8V。
如果在步骤212中确定电池组件在受控自放电期间的电压尚未达到阈值电压值,则该方法过程返回至步骤210。在一些实施方式中,该方法可按每0.1s、0.5s、1s、5s、10s、20s、30s、40s、50s、1min、5min、10min、20min、30min或1h的频率执行步骤212的检查。用以检查步骤212的频率可具有大于或等于本文所述的任何值的值。用以检查步骤212的频率值可具有落在本文所述的任何两个值之间的范围内的值。在一些情况下,该方法可每30s执行一次步骤212的检查。
如果在步骤212中确定电池组件在受控自放电期间的电压已达到阈值电压值,则在步骤214中,停止电池组件的受控自放电。可选地,根据图2的实施方式对电池组件进行放电的方法还可在步骤214之后包括步骤216,在该步骤216中,电池组件进入休眠模式。休眠模式可以是低功率消耗模式,在该模式下电池组件基本上不向物体的电气部件提供电流,而仅监控是否再次使用电池组件,例如,是否按下物体的电源按钮、是否开启物体电源和/或是否对电池组件进行充电。在一些情况下,如果在休眠模式期间开启物体电源,则电池组件可退出休眠模式并被再次激活。
图3是说明根据本发明又一实施方式对电池组件进行放电的方法300的流程图。方法300可用于对物体(例如,包括无人飞行器的可移动物体)的电池组件进行放电。方法300尤其可用于具有多个电池组件的系统中,所述电池组件可独立地开启和关闭。方法300的一些或全部步骤可由可操作地耦合至电池组件的一个或多个处理器来执行。
在步骤302中,借助于定时器来确定何时电池组件处于未使用状态已达阈值时间长度。当电池组件不再向物体供电时,例如与物体电断开时,该电池组件可被认为处于未使用状态。在一些实施方式中,电池组件的处于未使用状态可通过检测是否存在电流从电池组件流向物体的一个或多个部件来确定。例如,如果基本上没有电流从电池组件流出,则电池组件可被确定为处于未使用状态。在一些实施方式中,可使用定时器来确定电池组件是否处于未使用状态已达阈值时间长度。可对电池组件处于未使用状态的检测作出响应而开启定时器的计时(例如,通过一个或多个处理器)。例如,在检测到基本上没有电流从电池组件流出时,可触发定时器开始计时。
在一些情况下,阈值时间长度可以是基于用户输入而设定的。例如,用户可例如通过考虑电池类型、电池容量和/或电池的存储时间等来确定和输入阈值时间长度。或者,阈值时间长度可以是预定的,例如存储在与一个或多个处理器相关联的存储器中。例如,预定的时间长度阈值可小于或等于约:1s、10s、30s、1min、10min、20min、30min、40min、50min、1h、2h、5h、10h、15h、20h、1天、2天、3天、4天、5天、6天、7天、8天、9天、10天、11天、12天、13天、14天或15天。预定的时间长度阈值可具有大于或等于本文所述的任何值的值。预定的时间长度阈值的值可具有落在本文所述的任何两个值之间的范围内的值。在一些情况下,阈值时间长度可为约一至十天。可选地,阈值时间长度可由一个或多个处理器通过读取诸如电池类型、电池容量、从电池组件输出的电池电压等信息来自动确定。
如果检测到电池组件已处于未使用状态达阈值时间长度,则所述方法可继续至步骤304,在该步骤304中开启对电池组件的受控自放电。在一些实施方式中,如本文进一步详述,受控自放电可由电耦合至电池组件的自放电电路来实现。
在电池组件的自放电期间,方法300可确定是否符合停止自放电的特定准则。停止电池组件自放电的准则可包括例如电池组件再次处于使用状态和/或电池组件的电压已达到阈值电压值。在一些实施方式中,方法300可在步骤306中确定电池组件是否再次处于使用状态,并且同时地或顺序地,方法300可在步骤308中确定电池组件的电压是否已达到阈值电压值。
在步骤306中,确定电池组件在受控自放电期间是否再次处于使用状态。在一些实施方式中,可通过检测电池组件是否正在向物体供电(例如,当电流从电池组件流向物体的一个或多个部件时)来确定电池组件是否再次处于使用状态。例如,如果在受控自放电期间检测到电流从电池组件流出,则所述方法可继续至步骤310。
在步骤308中,确定电池组件电压是否已达到阈值电压值。步骤308中的确定基本类似于步骤212中的确定。阈值电压值可以是适当的电压值,在该电压值下可长期安全地存储电池组件。在一些实施方式中,阈值电压值可约为电池组件的标称电压的50%,且电池组件的电压可与阈值电压值相比较。例如,对于10个电芯的电池组件而言,阈值电压值可约为38V,每个电芯具有7.6V的标称电压。在备选的实施方式中,阈值电压值可设定成约为一个电芯的标称电压的50%,且所述电芯的平均电压可与阈值电压值相比较。例如,对于10个电芯的电池组件而言,阈值电压值可以是3.8V,每个电芯具有7.6V的标称电压。如果在步骤308中检测到电池组件的电压达到阈值电压值,则所述方法可以继续至步骤310。
在步骤310中,停止电池组件的受控自放电。在一些实施方式中,如果因为再次使用电池组件(例如,用户再次操作无人飞行器)而停止对电池组件的受控自放电,则电池组件可重新开始向物体或其一个或多个部件供电。否则,如果因为电池组件的电压达到阈值电压值而停止对电池组件的受控自放电,则所述方法还可以可选地在步骤310之后包括一个步骤,在该步骤中,如上文所公开的,电池组件进入休眠模式。
本文所述的电池组件的监控和自放电方法可使用各种类型的系统和装置来实现。在一些实施方式中,电池管理系统用于检测电池组件和/或由电池组件供电的物体的当前操作状态(例如,电池组件是否处于使用中,物体是否关机),并在适当的情况下开启和/或停止电池组件的受控自放电。电池管理系统可耦合至一个或多个电池组件,例如通过合适的电耦合。此外,电池管理系统可耦合至自放电电路,该自放电电路允许所述一个或多个电池组件的受控自放电。在一些实施方式中,在单一的整体外壳内提供一个或多个电池组件、电池管理系统和自放电电路,以便这些组件可作为单一单元的形式来提供,例如可从物体移除的单元。在备选的实施方式中,电池管理系统和/或自放电电路与电池组件分开提供并且在使用期间耦合至电池组件。例如,可以提供电池管理系统和/或自放电电路作为物体的一部分。
图4示出根据本发明实施方式的用于管理电池组件的放电的设备400的示例。对于电池组件402可提供电池管理系统404。电池管理系统404可电连接至电池组件402的每个电芯,以使得可单独控制每个电芯的放电。在备选的实施方式中,每个单元的放电可以是相连的,以使得单个电芯无法单独放电。电池管理系统404可被配置用于控制电耦合至电池组件402的自放电电路406的操作。自放电电路406可包含与电池组件402的正极端子和负极端子并联连接的自放电电阻4062和控制开关4064。自放电电阻4062可与控制开关4064串联连接。例如,自放电电阻的值可小于或等于约:1Ω、5Ω、10Ω、50Ω、100Ω、150Ω、200Ω、250Ω、300Ω、350Ω、400Ω、450Ω、500Ω、550Ω、600Ω、650Ω或700Ω。自放电电阻的值可具有大于或等于本文所述的任何值的值。自放电电阻的值可具有落在本文所述的任何两个值之间的范围内的值。在一些实施方式中,自放电电阻的值可小于或等于约:200Ω或500Ω。
在一些实施方式中,电池管理系统404可通过控制控制开关4064的开/关状态来控制自放电电路406的操作。在一些实施方式中,当控制开关4064切换至闭合状态(例如,开关为“ON”)时,可开启电池组件402的受控自放电,而且当控制开关4064切换至断开状态(例如,开关为“OFF”)时,可停止电池组件402的受控自放电。在一些情况下,控制开关4064的切换可由电池管理系统404自动控制。例如,如本文先前所述,如果自从关闭物体电源之后所经过的时间量超过阈值时间长度,则电池管理系统404可控制并将控制开关4064切换至闭合状态,而如果符合特定准则,则电池管理系统404可将控制开关4064切换至断开状态。或者,控制开关4064的切换可由用户手动控制。例如,在存储电池组件402之前,用户可将控制开关手动切换至闭合状态,以使得电池组件402可自放电。继而,用户可将控制开关手动切换至断开状态以停止放电。
如本文先前所述,电池组件402可用于向物体的至少一部分供电。物体可以是可移动物体或静止物体。在一些实施方式中,可移动物体可以是无人飞行器(UAV),且电池组件402可用于至少向无人飞行器的推进系统(例如,无人飞行器的旋翼)供电。在一些情况下,电池组件402可包含串联或并联电连接的多个电芯。或者,电池组件402可仅包含单一电芯。在一些实施方式中,可在外壳(例如,无人飞行器的外壳)内提供电池组件402、电池管理系统404和自放电电路406。
电池管理系统404可包含定时器。在一些实施方式中,当关闭物体电源时,定时器接收到信号(例如,从电池管理系统404接收到信号,或从电池组件向其供电的物体接收到信号)时被触发开始计时,并且可检测自从关闭物体电源之后所经过的时间量。如果所经过的时间量超过阈值时间长度,则电池管理系统404可使电池组件402通过自放电电路406开始放电。如上文所公开的,阈值时间长度可以是基于用户输入而设定的,或者可以是预定的。
在一些实施方式中,电池管理系统404可检测在电池组件402自放电期间该电池组件的电压是否达到阈值电压值,并且如果电池组件402的电压达到阈值电压值,则使电池停止通过自放电电路406自放电。阈值电压值可以是适当的电压值,在该电压值下可以长期安全地存储电池组件402。在一些情况下,阈值电压值可约为电池组件402的标称电压的50%。例如,阈值电压值可约为38V。或者,阈值电压值可约为电池组件402的每个电芯的标称电压的50%。例如,阈值电压值可约为3.8V。如上文所公开的,电池管理系统404可以可选地使电池组件402进入休眠模式。
在一些实施方式中,定时器可以在接收到指示电池组件处于未使用中的信号时被触发而开始计时。当电池组件处于未使用状态达阈值时间长度(例如,定时器的值超过阈值时间长度)时,电池管理系统404可使电池组件通过自放电电路406开始放电。在一些实施方式中,电池管理系统404可检测在自放电期间是否再次使用电池组件402,并且如果再次使用电池组件402,则可使电池组件停止通过自放电电路406自放电。在一些情况下,如上文所公开的,可通过检测电流何时从电池组件402流向物体的其他部件来确定电池组件是否被再次使用。同时,电池管理系统404还可以检测在电池组件402自放电期间该电池组件的电压是否达到阈值电压值,并且如果电池组件402的电压达到阈值电压值,则使电池停止通过自放电电路406进行自放电。
在一些实施方式中,电池管理系统404的定时器可由外部信号触发,所述外部信号诸如指示关闭物体电源的信号,或指示电池组件不在使用中的信号。用于触发定时器的信号可从诸如无人飞行器等物体通信而来。这种信号通信可以是物体的功能,而且对于无人飞行器而言可能尤其重要。
在一些实施方式中,电池管理系统404的处理可由一个或多个处理器单独地或共同地来执行。处理器可被提供作为无人飞行器的控制电路的一部分,或其可被提供作为独立的电路、模块或芯片。处理器可以由中央处理器(CPU)、专用集成电路(ASIC)或现场可编程门阵列(FPGA)来实现。本文中关于处理器的任何描述均可适用于一个或多个处理器,所述处理器可单独地或共同地执行关于处理器所述的任何功能。处理器能够根据非瞬态计算机可读介质来执行一个或多个步骤,所述非瞬态计算机可读介质包括代码、逻辑或指令,用以执行一个或多个步骤。可提供存储器存储单元,其可包含非瞬态计算机可读介质。
可在例如无人飞行器等物体上提供一个或多个处理器。可在例如无人飞行器等物体之外提供一个或多个处理器。在一些情况下,外部装置可具备可处理音频信号的处理器。在一些情况下,外部装置可以是无人飞行器的控制器。无人飞行器的控制器可控制无人飞行器的飞行、无人飞行器的传感器、无人飞行器的载体、无人飞行器的有效载荷或无人飞行器的任何其他部件。在一些其他情况下,外部装置可以是显示装置和/或扬声器。外部装置可以是监控器、扬声器、台式计算机、膝上型计算机、平板计算机、蜂窝电话、智能电话、个人数字助理或任何其他装置。在一些情况下,一个或多个处理器可分布在无人飞行器以及一个或多个外部装置上,或分布在多个外部装置上。可分布在无人飞行器和/或装置上的处理器可单独地或共同地生成经处理的信号。
在一些实施方式中,物体可携带多个机载电池组件。例如,无人飞行器可携带多个电池组件,每个电池组件具有一个或多个电芯,以向无人飞行器上机载的不同部件(例如,传感器、飞行控制器、推进系统、云台、相机等)供电。多个电池组件可具有不同的类型、不同的容量、不同的输出电压、不同的寿命等。在这种情况下,电池管理系统404可共同地控制多个电池组件的自放电。
在一些实施方式中,电池管理系统404可从多个电池组件中辨别符合特定准则的一个或多个电池组件。例如,特定准则可以是自从关闭物体电源之后所经过的时间量是否超过阈值时间长度,和/或电池组件是否处于未使用状态达阈值时间长度。如果一个或多个电池组件符合特定准则,则电池管理系统404可控制自放电电路的操作,所述自放电电路可对每个电池组件单独提供,以便开启和/或停止受控自放电。
在一些实施方式中,电池管理系统404中的定时器可检测对于每个电池组件而言,自从关闭物体电源之后所经过的时间量。如果对于多个电池组件中的一个或多个电池组件而言,所经过的时间量超过阈值时间长度,则电池管理系统404可使所述一个或多个电池组件通过各自的自放电电路开始放电。在一些实施方式中,定时器可以在接收到指示多个电池组件中的一个或多个电池组件处于未使用状态的信号时被触发而开始计时。当一个或多个电池组件体处于未使用状态达阈值时间长度时,电池管理系统404可使所述一个或多个电池组件通过各自的自放电电路开始放电。
在一些实施方式中,电池管理系统404可在自放电期间检测一个或多个电池组件的电压是否达到阈值电压值,并且如果一个或多个电池组件的电压达到阈值电压值,则可使一个或多个电池组件停止自放电。在一些实施方式中,电池管理系统404可在自放电期间检测一个或多个电池组件是否被再次使用,并且如果一个或多个电池组件被再次使用,则可使一个或多个电池组件停止通过各自的自放电电路进行自放电。
图5是说明一种根据本发明实施方式的组装用于管理电池组件放电的设备的方法500的流程图。
在步骤502中,提供一种包含一个或多个电芯的电池组件。电池组件可用于向物体的至少一部分供电。在一些实施方式中,物体可以是无人飞行器。电池组件可用于向无人飞行器的推进系统(例如,无人飞行器的旋翼)供电。或者,电池组件可用于向无人飞行器上机载的电气部件供电,所述电气部件包括但不限于控制系统(例如,飞行控制器)、传感器、通信系统、有效载荷等。
在步骤504中,将自放电电路电耦合至电池组件。在一些实施方式中,自放电电路可包含与电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关。自放电电阻和控制开关可串联连接。自放电电路可电耦合至电池组件,例如使用电线、线缆、销、触件等。
在步骤506中,将电池管理系统电耦合至自放电电路。可选地,电池管理系统可电耦合至电池组件。在一些实施方式中,如本文先前所述,电池管理系统可控制控制开关的操作。在一些情况下,当控制开关切换至闭合状态(例如,开关为“ON”)时,可开启电池组件的受控自放电,而且当控制开关切换至断开状态(例如,开关为“OFF”)时,可停止电池组件的受控自放电。
电池管理系统可包含定时器。在一些实施方式中,定时器可以在接收到指示关闭物体电源的信号时被触发而开始计时,并且可以检测自从关闭物体电源之后所经过的时间量。如果所经过的时间量超过阈值时间长度,则电池管理系统可使电池组件通过自放电电路开始放电。如上文所公开的,阈值时间长度可以是基于用户输入而设定的,或者可以是预定的。在一些实施方式中,电池管理系统可检测在电池组件的自放电期间,该电池组件的电压是否达到阈值电压值,并且如果电池组件的电压达到阈值电压值,则使电池停止通过自放电电路进行自放电。阈值电压值可以是适当的电压值,在该电压值下可以长期安全地存储电池组件。如上文所公开的,电池管理系统可以可选地使电池组件进入休眠模式。
在其他实施方式中,定时器可以在接收到指示电池组件处于未使用状态达阈值时间长度的信号时被触发而开始计时。在这种情况下,电池管理系统可使电池组件通过自放电电路而对电池组件开始放电。在一些实施方式中,电池管理系统可在自放电期间检测电池组件是否被再次使用,并且如果电池组件被再次使用,则可使电池组件停止通过自放电电路进行自放电。在一些情况下,如本文所公开的,可通过检测电流何时从电池组件流出来确定电池组件是否再次被使用。同时,电池管理系统还可以检测在电池组件的自放电期间,该电池组件的电压是否达到阈值电压值,并且如果电池组件的电压达到阈值电压值,则可使电池停止通过自放电电路进行自放电。
在本文所述的实施方式中,可在特定准则下对电池组件进行放电,所述特定准则例如关闭物体电源达阈值时间长度或电池组件处于未使用状态达阈值时间长度。在多电池系统中,可通过电池管理系统收集释放的电(例如,电力)来对物体上机载的其他电池组件进行充电。这对于无人飞行器可能非常重要,例如所收集的电力可延长无人飞行器的工作时间。备选地或共同地,可收集释放的电来对物体上机载的可充电电池进行充电。这种可充电电池可具有大容量来存储从其他电池组件释放的电,以使得电池组件可安全存储,例如以小于电池组件标称电压50%的存储电压进行存储。
在一些实施方式中,无人飞行器上可携带多个机载电池组件以向不同部件供电,所述不同部件包括但不限于控制系统(例如,飞行控制器)、传感器、通信系统、有效载荷(例如,相机、云台)等。所述多个电池组件可具有不同的容量、不同的寿命等,以使得一个电池组件可能被耗尽,而另一个电池组件可能基本上满电。如果要存储无人飞行器,则如上文所述可在电池管理系统的控制下对基本上具有满电的电池组件进行自放电。释放的电可由电池管理系统收集并用于对另一个基本上耗尽的电池组件进行充电。或者,来自在充电之后基本上具有满电的电池组件的任何多余的电皆可由电池管理系统收集并用于对无人飞行器上机载的可充电电池进行充电。或者,从基本上具有满电的电池组件释放的电可直接地由电池管理系统收集并用于对无人飞行器上机载的可充电电池进行充电。
图6是说明根据本发明实施方式的电池组件的电压变化的图表600。图表600的横轴是时间轴,而纵轴是说明要长期存储的电池组件的电压的轴。
在一些实施方式中,用于向诸如无人飞行器等物体的至少一部分供电的电池组件在时间t=0处可被检测为处于未使用状态。在该时间点t=0处,电池组件的电压可以是V1。或者,在时间t=0处可检测到物体电源被关闭。在该时间点t=0处,电池组件的电压可以是V1。
在一些实施方式中,例如可由定时器来检测自从电池组件被检测为处于未使用状态之后所经过的时间量。或者,例如可由定时器来检测自从关闭物体电源之后所经过的时间量。当由定时器检测到的时间量超过阈值时间长度tt时,可开启电池组件的受控自放电。
电池组件的电压在受控自放电期间可能下降,直到符合特定准则。在一些实施方式中,当电池组件的电压在时间t=tt处达到阈值电压值Vt时,可停止受控自放电。如上文所论述,阈值电压值Vt可以是对于长时间存储电池组件而言安全的电压值。
在一些情况下,如上文所论述,如果开启诸如无人飞行器等物体的电源或电池组件在受控自放电期间被再次使用,则可以停止受控自放电。在这些情况下,电池组件的电压可能不会降至阈值电压值Vt。
本文所述的系统、装置和方法可适用于多种物体,包括可移动物体和静止物体。如前文所述,本文关于诸如无人飞行器等飞行器的任何描述均可适用于且用于任何可移动物体。本文关于飞行器的任何描述均可尤其适用于无人飞行器。本发明的可移动物体可被配置用于在任何合适的环境中移动,诸如在空气中(例如,固定翼飞行器、旋转翼飞行器或既不具有固定翼也不具有旋转翼的飞行器)、在水中(例如,船舶或潜艇)、在地面上(例如,机动车,诸如轿车、卡车、公交车、厢式货车、摩托车、自行车;可移动结构或框架,诸如棒状物、钓鱼竿;或火车)、在地下(例如,地铁)、在太空中(例如,太空飞机、卫星或探测器),或这些环境的任何组合。可移动物体可以是载运工具,诸如本文其他各处所述的载运工具。在一些实施方式中,可移动物体可由活体携带,或可从活体上起飞,所述活体诸如人类或动物。合适的动物可包括禽类、犬类、猫类、马类、牛类、羊类、猪类、海豚类、啮齿动物类或昆虫类。
可移动物体能够在此环境中关于六个自由度自由移动(例如,三个平移自由度和三个旋转自由度)。或者,例如可通过预定的路径、轨迹或方向将可移动物体的移动限制在一个或多个自由度上。移动可通过任何合适的致动机构(诸如引擎或电机)来致动。可移动物体的致动机构可由任何合适的能源来供电,诸如电能、磁能、太阳能、风能、重力能、化学能、核能或其任何合适的组合。如本文其他处所述,可移动物体可通过推进系统自推进。推进系统可选地依靠能源来运行,诸如电能、磁能、太阳能、风能、重力能、化学能、核能或其任何合适的组合。或者,可移动物体可由生物体所携带。
在一些情况下,可移动物体可以是飞行器。例如,飞行器可以是固定翼飞机(例如,飞机、滑翔机)、旋转翼飞行器(例如,直升机、旋翼飞机)、同时具有固定翼和旋转翼的飞行器或既不具有固定翼也不具有旋转翼的飞行器(例如,飞艇、热气球)。飞行器可以是自推进式,诸如在空气中自推进。自推进式飞行器可采用推进系统,诸如包括一个或多个引擎、电机、轮子、轮轴、磁体、旋翼、螺旋桨、桨叶、喷嘴或其任何合适组合的推进系统。在一些情况下,推进系统可用于使可移动物体能够从表面起飞、降落在表面上、保持其当前位置和/或方向(例如,悬停)、改变方向和/或改变位置。
可移动物体可以由用户遥控或由可移动物体内或上的乘员本地控制。可移动物体可由单独载运工具内的乘员遥控。在一些实施方式中,可移动物体是无人可移动物体,诸如无人飞行器。无人可移动物体(诸如无人飞行器)可不具有搭载该可移动物体的乘员。可移动物体可由人或自主控制系统(例如,计算机控制系统)或其任何合适的组合来控制。可移动物体可以是自主或半自主机器人,诸如配置有人工智能的机器人。
可移动物体可具有任何合适的大小和/或尺寸。在一些实施方式中,可移动物体可具有在载运工具内或上容纳人类乘员的大小和/或尺寸。或者,可移动物体的大小和/或尺寸可小于能够在载运工具内或上容纳人类乘员的大小和/或尺寸。可移动物体的大小和/或尺寸可适合被人举起或携带。或者,可移动物体可大于适合被人举起或携带的大小和/或尺寸。在一些情况下,可移动物体可具有小于或等于约:2cm、5cm、10cm、50cm、1m、2m、5m或10m的最大尺寸(例如,长度、宽度、高度、直径、对角线)。该最大尺寸可大于或等于约:2cm、5cm、10cm、50cm、1m、2m、5m或10m。例如,可移动物体的相对旋翼的轴间距离可小于或等于约:2cm、5cm、10cm、50cm、1m、2m、5m或10m。或者,相对旋翼的轴间距离可大于或等于约:2cm、5cm、10cm、50cm、1m、2m、5m或10m。
在一些实施方式中,可移动物体可具有小于100cm x 100cm x100cm、小于50cm x50cm x 30cm或小于5cm x 5cm x 3cm的体积。可移动物体的总体积可小于或等于约:1cm3、2cm3、5cm3、10cm3、20cm3、30cm3、40cm3、50cm3、60cm3、70cm3、80cm3、90cm3、100cm3、150cm3、200cm3、300cm3、500cm3、750cm3、1000cm3、5000cm3、10,000cm3、100,000cm3、1m3或10m3。相反地,可移动物体的总体积可大于或等于约:1cm3、2cm3、5cm3、10cm3、20cm3、30cm3、40cm3、50cm3、60cm3、70cm3、80cm3、90cm3、100cm3、150cm3、200cm3、300cm3、500cm3、750cm3、1000cm3、5000cm3、10,000cm3、100,000cm3、1m3或10m3。
在一些实施方式中,可移动物体可具有小于或等于约:32,000cm2、20,000cm2、10,000cm2、1,000cm2、500cm2、100cm2、50cm2、10cm2或5cm2的占位面积(指的是可移动物体所围绕的横向横截面)。相反地,占位面积可大于或等于约:32,000cm2、20,000cm2、10,000cm2、1,000cm2、500cm2、100cm2、50cm2、10cm2或5cm2。
在一些情况下,可移动物体的重量可不超过1000kg。可移动物体的重量可小于或等于约:1000kg、750kg、500kg、200kg、150kg、100kg、80kg、70kg、60kg、50kg、45kg、40kg、35kg、30kg、25kg、20kg、15kg、12kg、10kg、9kg、8kg、7kg、6kg、5kg、4kg、3kg、2kg、1kg、0.5kg、0.1kg、0.05kg或0.01kg。相反地,重量可大于或等于约:1000kg、750kg、500kg、200kg、150kg、100kg、80kg、70kg、60kg、50kg、45kg、40kg、35kg、30kg、25kg、20kg、15kg、12kg、10kg、9kg、8kg、7kg、6kg、5kg、4kg、3kg、2kg、1kg、0.5kg、0.1kg、0.05kg或0.01kg。
在一些实施方式中,可移动物体相对于该可移动物体所携带的负载可较小。如本文其他处进一步详述,负载可包括有效载荷和/或载体。在一些实施例中,可移动物体重量与负载重量的比率可大于、小于或等于约1:1。在一些情况下,可移动物体重量与负载重量的比率可大于、小于或等于约1:1。可选地,载体重量与负载重量的比率可大于、小于或等于约1:1。需要时,可移动物体重量与负载重量的比率可小于或等于:1:2、1:3、1:4、1:5、1:10或甚至更小。相反地,可移动物体重量与负载重量的比率也可以大于或等于2:1、3:1、4:1、5:1、10:1或甚至更大。
在一些实施方式中,可移动物体可具有低能耗。例如,可移动物体可使用小于约:5W/h、4W/h、3W/h、2W/h、1W/h或更小。在一些情况下,可移动物体的载体可具有低能耗。例如,载体可使用小于约:5W/h、4W/h、3W/h、2W/h、1W/h或更小。可选地,可移动物体的有效载荷可具有低能耗,诸如小于约:5W/h、4W/h、3W/h、2W/h、1W/h或更小。
图7说明一种根据本发明实施方式的无人飞行器(UAV)700。无人飞行器可作为如本文所述可移动物体的一个实施例,对电池组件进行放电的方法和设备可适用于该实施例中。无人飞行器700可包括具有四个旋翼702、704、706和708的推进系统。可提供任意数量的旋翼(例如,一个、两个、三个、四个、五个、六个或更多)。无人飞行器的旋翼、旋翼组件或其他推进系统可使得无人飞行器能够旋停/保持位置、改变方向和/或改变位置。相对旋翼的轴间距离可为任意合适的长度710。例如,长度710可小于或等于2m,或小于或等于5m。在一些实施方式中,长度710可在40cm至1m、10cm至2m或5cm至5m的范围内。本文中关于无人飞行器的任何描述可适用于可移动物体,诸如不同类型的可移动物体,反之亦然。无人飞行器可使用如本文所述的助推起飞系统或方法。
在一些实施方式中,可移动物体可被配置用于携带负载。负载可包括乘客、货物、设备、仪器等中的一者或多者。可在外壳内提供负载。外壳可与可移动物体的外壳分离、或作为可移动物体外壳的一部分。或者,可提供具有外壳的负载,而可移动物体不具有外壳。或者,部分负载或整个负载可不具有外壳。负载可相对于可移动物体刚性固定。可选地,负载相对于可移动物体是可移动的(例如,相对于可移动物体可平移或可旋转)。如本文其他处所述,负载可包括有效载荷和/或载体。
在一些实施方式中,可移动物体、载体和有效载荷相对于固定参照系(例如,周围环境)的移动和/或相对于彼此的移动可通过终端进行控制。终端可以是远离可移动物体、载体和/或有效载荷位置处的遥控装置。终端可安置于或固定于支撑平台上。或者,终端可以是手持式或可穿戴式的装置。例如,终端可包括智能手机、平板计算机、膝上型计算机、计算机、眼镜、手套、头盔、麦克风或其合适的组合。终端可包括用户接口,诸如键盘、鼠标、手柄、触摸屏或显示器。任何合适的用户输入都可用于与终端交互,诸如手动输入命令、声音控制、手势控制或位置控制(例如,通过终端的移动、定位或倾斜)。
终端可用于控制可移动物体、载体和/或有效载荷的任何合适的状态。例如,终端可用于控制可移动物体、载体和/或有效载荷相对于固定参照系和/或相对于彼此的位置和/或方向。在一些实施方式中,终端可用于控制可移动物体、载体和/或有效载荷的单独元件,诸如载体的致动组件、有效载荷的传感器或有效载荷的发射体。终端可包括无线通信装置,其适于与可移动物体、载体或有效载荷中的一个或多个进行通信。
终端可包括合适的显示单元用于观察可移动物体、载体和/或有效载荷的信息。例如,终端可被配置用于显示可移动物体、载体和/或有效载荷关于位置、平移速度、平移加速度、方向、角速度、角加速度或其任何合适组合的信息。在一些实施方式中,终端可显示有效载荷提供的信息,诸如功能性有效载荷提供的数据(例如,相机或其他图像捕捉装置记录的图像)。
可选地,同一终端可同时控制可移动物体、载体和/或有效载荷,或控制可移动物体、载体和/或有效载荷的状态,以及接收和/或显示来自可移动物体、载体和/或有效载荷的信息。例如,终端可控制有效载荷相对于环境的位置,同时显示有效载荷捕捉的图像数据,或有关有效载荷位置的信息。或者,不同终端可用于不同功能。例如,第一终端可控制可移动物体、载体和/或有效载荷的移动或状态,而第二终端可接收和/或显示来自可移动物体、载体和/或有效载荷的信息。例如,第一终端可用于控制有效载荷相对于环境的位置,而第二终端显示有效载荷捕捉的图像数据。在可移动物体与同时控制可移动物体和接收数据的集成终端之间,或在可移动物体与同时控制可移动物体和接收数据的多个终端之间可使用各种通信模式。例如,在可移动物体与同时控制可移动物体和接收来自可移动物体的数据的终端之间可形成至少两种不同的通信模式。
图8说明一种根据本发明实施方式包括载体802和有效载荷804的可移动物体800。尽管可移动物体800被描述为飞行器,但此描述并非想要限制,且如本文先前所述,可使用任何合适类型的可移动物体。本领域技术人员应了解,本文关于飞行器系统所述的任何实施方式都可适用于任何合适的可移动物体(例如,无人飞行器)。在一些情况下,可以在可移动物体800上提供有效载荷804,而不需要载体802。可移动物体800可包括推进机构806、传感系统808和通信系统810。
如先前所述,推进机构806可包括旋翼、螺旋桨、桨叶、引擎、电机、轮子、轮轴、磁体或喷嘴中的一个或多个。可移动物体可具有一个或多个、两个或多个、三个或多个、或四个或多个推进机构。推进机构可以全是相同类型。或者,一个或多个推进机构可以是不同类型的推进机构。推进机构806可以通过使用任何合适的方式(诸如本文其他处所述的支撑元件(例如,驱动轴))安装在可移动物体800上。推进机构806可以安装在可移动物体800的任何合适的部分上,诸如顶部、底部、前侧、后侧、侧面、或其合适的组合。
在一些实施方式中,推进机构806能够使可移动物体800垂直于表面起飞,或垂直地降落于表面上,而可移动物体800不需要任何水平移动(例如,不需要沿跑道滑行)。可选地,推进机构806可用于允许可移动物体800以规定的位置和/或方向悬停在空中。推进机构800中的一个或多个可以独立于其他推进机构来进行控制。或者,推进机构800可被配置为同时控制。例如,可移动物体800可具有多个水平方向的旋翼,这些旋翼可以为可移动物体提供提升力和/或推力。多个水平方向的旋翼可以致动来为可移动物体800提供垂直起飞、垂直降落和悬停的能力。在一些实施方式中,一个或多个水平方向的旋翼可按顺时针方向旋转,而一个或多个水平旋翼可按逆时针方向旋转。例如,顺时针旋翼的数量与逆时针旋翼的数量可相等。每个水平方向旋翼的旋转速度可独立变化,从而控制每个旋翼所产生的提升力和/或推力,并由此调整可移动物体800的空间布局、速度和/或加速度(例如,相对于多达三个平移度和多达三个旋转度)。
感测系统808可包括一个或多个传感器来感测可移动物体800的空间布局、速度和/或加速度(例如,相对于多达三个平移度和多达三个旋转度)。所述一个或多个传感器可包括全球定位系统(GPS)传感器、运动传感器、惯性传感器、近距离传感器或图像传感器。感测系统808提供的感测数据可用于控制可移动物体800的空间布局、速度和/或方向(如下文所述,例如使用合适的处理单元和/或控制模块)。或者,感测系统808可用于提供关于可移动物体周围环境的数据,诸如气象条件、接近的潜在障碍、地理特征的位置、人造结构的位置等。
通信系统810能够实现与具有通信系统814的终端812通过无线信号816进行通信。通信系统810、814可包括任意数量的适合无线通信的发送器、接收器和/或收发器。通信可以是单向通信,以便数据只能沿一个方向传输。例如,单向通信可只涉及可移动物体800向终端812传输数据,反之亦然。通信系统810的一个或多个发送器可向通信系统812的一个或多个接收器传输数据,反之亦然。或者,通信可以是双向通信,以便在可移动物体800与终端812之间可双向传输数据。双向通信可涉及从通信系统810的一个或多个发送器向通信系统814的一个或多个接收器传输数据,反之亦然。
在一些实施方式中,终端812可向可移动物体800、载体802和有效载荷804中的一个或多个提供控制数据,并接收来自可移动物体800、载体802和有效载荷804中一个或多个的信息(例如,可移动物体、载体或有效载荷的位置和/或运动信息;有效载荷感测的数据,诸如有效载荷相机所捕捉的图像数据)。在一些情况下,来自终端的控制数据可包括对可移动物体、载体和/或有效载荷的相对位置、移动、致动或控制的指令。例如,控制数据可致使可移动物体的位置和/或方向发生改变(例如,通过控制推进机构806),或致使有效载荷相对于可移动物体移动(例如,通过控制载体802)。来自终端的控制数据可导致对有效载荷的控制,诸如控制相机或其他图像捕捉装置的操作(例如,捕获静止或运动的照片、推近或拉远、开机或关机、切换成像模式、改变图像解析度、改变焦距、改变景深、改变曝光时间、改变视角或视野)。在一些情况下,来自可移动物体、载体和/或有效载荷的通信可包括来自(例如,感测系统808或有效载荷804的)一个或多个传感器的信息。通信可包括来自一种或多种不同类型传感器(例如,GPS传感器、运动传感器、惯性传感器、近距离传感器或图像传感器)所感测的信息。这些信息可能是关于可移动物体、载体和/或有效载荷的位置(例如,位置、方向)、运动或加速度。来自有效载荷的这些信息可包括有效载荷所捕捉的数据或有效载荷的感测状态。终端812所传输提供的控制数据可被配置用于控制可移动物体800、载体802或有效载荷804中的一者或多者的状态。备选地或组合地,载体802和有效载荷804也可以各自包括被配置用于与终端812通信的通信模块,以便终端可以单独地与可移动物体800、载体802和有效载荷804中的每一个进行通信并对其进行控制。
在一些实施方式中,可移动物体800可被配置用于与除终端812以外的另一远程装置进行通信,或不与终端812通信,取而代之与另一远程装置进行通信。终端812也可被配置用于与另一远程装置以及可移动物体800进行通信。例如,可移动物体800和/或终端812可与另一可移动物体、或另一可移动物体的载体或有效载荷进行通信。需要时,远程装置可以是第二终端或其他计算装置(例如,计算机、膝上型计算机、平板计算机、智能电话或其他移动装置)。远程装置可被配置用于向可移动物体800传输数据、接收来自可移动物体800的数据、向终端812传输数据和/或接收来自终端812的数据。可选地,远程装置可连接至互联网或其他电信网络,以便从可移动物体800和/或终端812接收的数据可上传到网站或服务器上。
图9是通过框图演示根据本发明实施方式用于控制可移动物体的系统900的示意说明。系统900可结合本文公开的系统、装置和方法的任何合适的实施方式来使用。系统900可包括感测模块902、处理单元904、非瞬态计算机可读介质906、控制模块908和通信模块910。
感测模块902可利用不同类型的传感器以不同的方式收集与可移动物体相关的信息。不同类型的传感器可感测不同类型的信号或来自不同来源的信号。例如,传感器可包括惯性传感器、GPS传感器、近距离传感器(例如,激光雷达)或视觉/图像传感器(例如,相机)。感测模块902可操作性地耦合至具有多个处理器的处理单元904。在一些实施方式中,感测模块可操作性地耦合至传输模块912(例如,Wi-Fi图像传输模块),该传输模块被配置用于直接向合适的外部装置或系统传输感测数据。例如,传输模块912可用于向远程终端传输感测模块902的相机所捕捉的图像。
处理单元904可具有一个或多个处理器,诸如可编程处理器(例如,中央处理器(CPU))。处理单元904可操作性地耦合至非瞬态计算机可读介质906。非瞬态计算机可读介质906可存储处理单元904可执行的逻辑、代码和/或程序指令来执行一个或多个步骤。非瞬态计算机可读介质可包括一个或多个存储器单元(例如,可移动介质或外部存储,诸如SD卡或随机存取存储器(RAM))。在一些实施方式中,来自感测模块902的数据可直接传送并存储在非瞬态计算机可读介质906的存储器单元中。非瞬态计算机可读介质906的存储器单元可存储处理单元904可执行的逻辑、代码和/或程序指令来执行本文所述方法的任何合适的实施方式。例如,处理单元904可被配置用于执行指令,致使处理单元904的一个或多个处理器分析感测模块所产生的感测数据。存储器单元可存储来自感测模块的感测数据以供由处理单元904进行处理。在一些实施方式中,非瞬态计算机可读介质906的存储器单元可用于存储处理单元904所产生的处理结果。
在一些实施方式中,处理单元904可操作性地耦合至控制模块908,该控制模块被配置用于控制可移动物体的状态。例如,控制模块908可被配置用于控制可移动物体的推进机构,从而调整可移动物体相对于六个自由度的空间布局、速度和/或加速度。备选地或组合地,控制模块908可控制载体、有效载荷或感测模块中一个或多个的状态。
处理单元904可操作性地耦合至通信模块910,该通信模块被配置用于从一个或多个外部装置(例如,终端、显示装置或其他遥控器)传输和/或接收数据。可以使用任何合适的通信方式,诸如有线通信或无线通信。例如,通信模块910可以利用局域网(LAN)、广域网(WAN)、红外线、无线电、WiFi、点对点(P2P)网络、电信网络、云通信等中的一种或多种。可选地,可以使用中继站,诸如发射塔、卫星或移动台。无线通信可依赖于近距离或不依赖于近距离。在一些实施方式中,通信可能需要或不需要视线。通信模块910可传输和/或接收来自感测模块902的感测数据、处理单元904所产生的处理结果、预定的控制数据、来自终端或遥控器的用户命令等中的一种或多种。
系统900的部件可排列成任何合适的配置。例如,系统900的一个或多个部件可位于可移动物体、载体、有效载荷、终端、感测系统或与上述中的一个或多个连通的另一外部装置上。另外,尽管图9描述单一的处理单元904和单一的非瞬态计算机可读介质906,但本领域技术人员应了解,这并非想要限制,且系统900可包括多个处理单元和/或非瞬态计算机可读介质。在一些实施方式中,多个处理单元和/或非瞬态计算机可读介质中的一个或多个可位于不同位置,诸如位于可移动物体、载体、有效载荷、终端、感测模块、与上述中的一个或多个连通的另一外部装置或其合适的组合上,以便系统900所执行的处理和/或存储功能的任何合适的方面在一个或多个前述位置上都可能发生。
尽管本文已显示并描述本发明的优选实施方式,但本领域技术人员将显而易见,所述实施方式仅以实施例的方式提供。在不脱离本发明的情况下,本领域技术人员现将进行多种变化、改变和取代。应了解,在实践本发明中可以采用本文所述本发明实施方式的各种备选形式。预期下文的权利要求书界定本发明的范畴且因此涵盖在这些权利要求及其等效物范畴内的方法和结构。
Claims (142)
1.一种对电池组件进行放电的方法,所述电池组件用于向物体的至少一部分供电,所述方法包括:
检测何时关闭所述物体电源;
借助于定时器,检测自从关闭所述物体电源之后所经过的时间量;以及
当所述时间量超过阈值时间长度时,开启所述电池组件的受控自放电;
还包括在所述电池组件的受控自放电期间检测所述电池组件的电压;
其中所述电池组件的受控自放电由电耦合至所述电池组件的自放电电路来执行;
还包括当所述电压达到阈值电压值时停止所述电池组件的受控自放电;
其中所述自放电电路包含与所述电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时开启所述受控自放电,且当所述控制开关切换至断开状态时停止所述受控自放电。
2.如权利要求1所述的方法,其中所述阈值电压值约为所述电池组件的标称电压的50%。
3.如权利要求2所述的方法,其中所述阈值电压值约为38V。
4.如权利要求1所述的方法,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
5.如权利要求1所述的方法,还包括在停止所述电池组件的受控自放电后进入休眠模式。
6.如权利要求1所述的方法,还包括检测何时开启所述物体电源。
7.如权利要求6所述的方法,还包括当开启所述物体电源时,停止所述电池组件的受控自放电。
8.如权利要求1所述的方法,还包括检测所述电池组件是否向所述物体的所述至少一部分供电。
9.如权利要求8所述的方法,还包括如果所述电池组件向所述物体的所述至少一部分供电,则停止所述电池组件的受控自放电。
10.如权利要求1所述的方法,其中所述电池组件包含多个电芯。
11.如权利要求1所述的方法,其中所述电池组件仅包含单一电芯。
12.如权利要求1所述的方法,其中所述物体为可移动物体。
13.如权利要求12所述的方法,其中所述可移动物体为无人飞行器(UAV)。
14.如权利要求13所述的方法,其中所述电池组件机载在所述无人飞行器上。
15.如权利要求13所述的方法,其中所述电池组件用于向所述无人飞行器的推进系统供电。
16.如权利要求1所述的方法,其中所述电池组件位于所述物体的外壳内。
17.如权利要求1所述的方法,其中所述阈值时间长度为至少一至十天。
18.如权利要求17所述的方法,其中所述阈值时间长度是预定的。
19.如权利要求17所述的方法,其中所述阈值时间长度是基于用户输入而设定的。
20.一种用于对电池组件进行放电的设备,所述电池组件用于向物体的至少一部分供电,所述设备包含:
定时器,其被配置用于:(1)当关闭所述物体电源时接收信号,并响应于所述信号而开启计时,以及(2)检测自从关闭所述物体电源之后所经过的时间量;和
一个或多个处理器,其单独地或共同地被配置用于:(1)从所述定时器接收指示所述所经过的时间量的信号,以及(2)当所述经过的时间量超过阈值时间长度时,生成开启所述电池组件的受控自放电的信号;
其中所述一个或多个处理器还单独地或共同地被配置用于:在所述电池组件的受控自放电期间接收指示所述电池组件的电压的信号;
其中所述设备还包含电耦合至所述电池组件的自放电电路,所述电池组件的受控自放电由所述自放电电路来执行;
其中所述一个或多个处理器还单独地或共同地被配置用于:当所述电压达到阈值电压值时,生成停止所述电池组件的受控自放电的信号;
其中所述自放电电路包含与所述电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时开启所述受控自放电,且当所述控制开关切换至断开状态时停止所述受控自放电。
21.如权利要求20所述的设备,其中所述阈值电压值约为所述电池组件的标称电压的50%。
22.如权利要求21所述的设备,其中所述阈值电压值约为38V。
23.如权利要求20所述的设备,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
24.如权利要求20所述的设备,所述一个或多个处理器还单独地或共同地被配置用于:在停止所述电池组件的受控自放电后,生成使所述电池组件进入休眠模式的信号。
25.如权利要求20所述的设备,所述一个或多个处理器还单独地或共同地被配置用于:接收指示何时开启所述物体电源的信号。
26.如权利要求25所述的设备,所述一个或多个处理器还单独地或共同地被配置用于:当开启所述物体电源时,生成停止所述电池组件的受控自放电的信号。
27.如权利要求20所述的设备,所述一个或多个处理器还单独地或共同地被配置用于:接收指示所述电池组件向所述物体的所述至少一部分供电的信号。
28.如权利要求27所述的设备,所述一个或多个处理器还单独地或共同地被配置用于:如果所述电池组件向所述物体的所述至少一部分供电,则生成停止所述电池组件的受控自放电的信号。
29.如权利要求20所述的设备,其中所述电池组件包含多个电芯。
30.如权利要求20所述的设备,其中所述电池组件仅包含单一电芯。
31.如权利要求20所述的设备,其中所述物体为可移动物体。
32.如权利要求31所述的设备,其中所述可移动物体为无人飞行器(UAV)。
33.如权利要求32所述的设备,其中所述电池组件机载在所述无人飞行器上。
34.如权利要求32所述的设备,其中所述电池组件用于向所述无人飞行器的推进系统供电。
35.如权利要求20所述的设备,其中所述电池组件位于所述物体的外壳内。
36.如权利要求20所述的设备,其中所述阈值时间长度为至少一至十天。
37.如权利要求36所述的设备,其中所述阈值时间长度是预定的。
38.如权利要求36所述的设备,其中所述阈值时间长度是基于用户输入而设定的。
39.一种无人飞行器,其包含电池组件和如权利要求20所述的设备,所述设备可操作性地与所述电池组件耦合。
40.一种对电池组件进行放电的方法,所述方法包括:
借助于定时器,检测所述电池组件何时处于未使用状态达阈值时间长度;以及
当所述电池组件处于未使用状态达阈值时间长度时,开启所述电池组件的受控自放电;
还包括当(1)所述电池组件处于使用状态,或(2)所述电池组件的电压达到阈值电压值时,停止所述电池组件的受控自放电;
其中所述电池组件的受控自放电由电耦合至所述电池组件的自放电电路执行;
其中所述自放电电路包含与所述电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时开启所述受控自放电,且当所述控制开关切换至断开状态时停止所述受控自放电。
41.如权利要求40所述的方法,其中所述阈值电压值约为所述电池组件的标称电压的50%。
42.如权利要求41所述的方法,其中所述阈值电压值约为38V。
43.如权利要求40所述的方法,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
44.如权利要求40所述的方法,还包括:当所述电池组件的电压达到所述阈值电压值时,在停止所述电池组件的受控自放电后进入休眠模式。
45.如权利要求40所述的方法,其中所述电池组件包含多个电芯。
46.如权利要求40所述的方法,其中所述电池组件仅包含单一电芯。
47.如权利要求40所述的方法,其中所述电池组件机载在无人飞行器上。
48.如权利要求40所述的方法,其中所述电池组件用于向无人飞行器的推进系统供电。
49.如权利要求40所述的方法,其中所述电池组件位于无人飞行器的外壳内。
50.如权利要求40所述的方法,其中所述阈值时间长度为至少一至十天。
51.如权利要求50所述的方法,其中所述阈值时间长度是预定的。
52.如权利要求50所述的方法,其中所述阈值时间长度是基于用户输入而设定的。
53.一种对电池组件进行放电的设备,所述电池组件用于向物体的至少一部分供电,所述设备包含:
定时器,其被配置用于检测所述电池组件处于未使用状态的时间量;和
一个或多个处理器,其单独地或共同地被配置用于:
从所述定时器接收指示所述时间量的信号,以及
当所述时间量超过阈值时间长度时,生成开启所述电池组件的受控自放电的信号;
其中所述一个或多个处理器还单独地或共同地被配置用于:当(1)所述电池组件处于使用状态,或(2)所述电池组件电压达到阈值电压值时,生成停止所述电池组件的受控自放电的信号;
其中所述设备还包含电耦合至所述电池组件的自放电电路,所述电池组件的受控自放电由所述自放电电路来执行;
其中所述自放电电路包含与所述电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时开启所述受控自放电,且当所述控制开关切换至断开状态时停止所述受控自放电。
54.如权利要求53所述的设备,其中所述阈值电压值约为所述电池组件的标称电压的50%。
55.如权利要求54所述的设备,其中所述阈值电压值约为38V。
56.如权利要求53所述的设备,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
57.如权利要求53所述的设备,其中所述一个或多个处理器还单独地或共同地被配置用于:当所述电池组件电压达到所述阈值电压值时,在停止所述电池组件的受控自放电之后生成使所述电池组件进入休眠模式的信号。
58.如权利要求53所述的设备,其中所述电池组件包含多个电芯。
59.如权利要求53所述的设备,其中所述电池组件仅包含单一电芯。
60.如权利要求53所述的设备,其中所述物体为可移动物体。
61.如权利要求60所述的设备,其中所述可移动物体为无人飞行器(UAV)。
62.如权利要求61所述的设备,其中所述电池组件机载在所述无人飞行器上。
63.如权利要求61所述的设备,其中所述电池组件用于向所述无人飞行器的推进系统供电。
64.如权利要求53所述的设备,其中所述电池组件位于所述物体的外壳内。
65.如权利要求53所述的设备,其中所述阈值时间长度为至少一至十天。
66.如权利要求65所述的设备,其中所述阈值时间长度是预定的。
67.如权利要求65所述的设备,其中所述阈值时间长度是基于用户输入而设定的。
68.一种无人飞行器,其包含电池组件和如权利要求53所述的设备。
69.一种用于管理电池组件放电的设备,所述设备包含:
所述电池组件,其包含一个或多个电芯;
自放电电路,其电耦合至所述电池组件;和
电池管理系统,其被配置用于控制所述自放电电路的操作,以便允许所述电池组件的受控自放电,其中所述电池管理系统被配置用于:当定时器超过阈值时间长度时,使所述电池组件通过所述自放电电路进行放电;
其中所述电池管理系统被配置用于:当所述电池组件的电压达到阈值电压值时,使所述电池组件停止通过所述自放电电路进行放电;
其中所述电池组件包含正极端子和负极端子,且其中所述自放电电路包含与所述正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时发生所述受控自放电,且其中当所述控制开关切换至断开状态时不发生所述受控自放电。
70.如权利要求69所述的设备,其中所述电池管理系统控制所述控制开关的操作。
71.如权利要求69所述的设备,其中所述阈值电压值约为所述电池组件的标称电压的50%。
72.如权利要求71所述的设备,其中所述阈值电压值约为38V。
73.如权利要求69所述的设备,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
74.如权利要求69所述的设备,其中所述电池管理系统被配置用于:当所述一个或多个电芯的平均电压达到阈值电压值时,使所述电池组件停止通过所述自放电电路进行放电。
75.如权利要求74所述的设备,其中所述阈值电压值约为所述电芯的标称电压的50%。
76.如权利要求75所述的设备,其中所述阈值电压值约为3.8V。
77.如权利要求74所述的设备,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
78.如权利要求69所述的设备,其中所述电池组件用于向物体的至少一部分供电。
79.如权利要求78所述的设备,其中所述物体为可移动物体。
80.如权利要求79所述的设备,其中所述可移动物体为无人飞行器(UAV)。
81.如权利要求80所述的设备,其中所述电池组件机载在所述无人飞行器上。
82.如权利要求80所述的设备,其中所述电池组件用于向所述无人飞行器的推进系统供电。
83.如权利要求78所述的设备,其中所述电池管理系统被配置用于:当所述电池管理系统检测到关闭所述物体电源时,开启所述定时器。
84.如权利要求78所述的设备,其中所述电池管理系统被配置用于:当所述电池组件正在向所述物体的所述至少一部分供电时,使所述电池组件停止通过所述自放电电路进行放电。
85.如权利要求69所述的设备,其中所述电池管理系统被配置用于:当所述管理系统检测到所述电池组件处于未使用状态时,开启所述定时器。
86.如权利要求69所述的设备,其中所述电池管理系统被配置用于:当所述电池组件处于使用状态时,使所述电池组件停止通过所述自放电电路进行放电。
87.如权利要求69所述的设备,其中所述电池管理系统包含所述定时器。
88.如权利要求69所述的设备,其中在外壳内提供所述电池组件、自放电电路和电池管理系统。
89.如权利要求69所述的设备,其中所述阈值时间长度为至少一至十天。
90.如权利要求89所述的设备,其中所述阈值时间长度是预定的。
91.如权利要求89所述的设备,其中所述阈值时间长度是基于用户输入而设定的。
92.一种用于管理电池组件放电的方法,所述方法包括:
提供如权利要求69所述的设备;以及
在所述电池管理系统处接收使所述定时器开始计时的信号。
93.如权利要求92所述的方法,其中所述信号指示所述电池组件处于未使用状态。
94.如权利要求92所述的方法,其中所述电池组件向物体的至少一部分供电,且其中所述信号指示关闭所述物体电源。
95.如权利要求92所述的方法,其中所述电池组件向物体的至少一部分供电,且其中所述信号指示所述电池组件未电耦合至所述物体。
96.一种包含如权利要求69所述的设备的无人飞行器。
97.一种用于组装用于管理电池组件放电的设备的方法,所述方法包括:
提供包含一个或多个电芯的电池组件;
将自放电电路电耦合至所述电池组件;以及
将电池管理系统电耦合至所述自放电电路,其中所述电池管理系统被配置用于控制所述自放电电路的操作以便允许所述电池组件的受控自放电,且其中所述电池管理系统被配置用于当定时器超过阈值时间长度时,使所述电池组件通过所述自放电电路进行放电;
其中所述电池管理系统被配置用于当所述电池组件的电压达到阈值电压值时,使所述电池组件停止通过所述自放电电路进行放电;
其中所述电池组件包含正极端子和负极端子,且其中所述自放电电路包含与所述正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时发生所述受控自放电,且其中当所述控制开关切换至断开状态时不发生所述受控自放电。
98.如权利要求97所述的方法,其中所述电池管理系统控制所述控制开关的操作。
99.如权利要求97所述的方法,其中所述阈值电压值约为所述电池组件的标称电压的50%。
100.如权利要求99所述的方法,其中所述阈值电压值约为38V。
101.如权利要求97所述的方法,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
102.如权利要求97所述的方法,其中所述电池管理系统被配置用于当所述一个或多个电芯的平均电压达到阈值电压值时,使所述电池组件停止通过所述自放电电路进行放电。
103.如权利要求102所述的方法,其中所述阈值电压值约为所述电芯的标称电压的50%。
104.如权利要求103所述的方法,其中所述阈值电压值约为3.8V。
105.如权利要求102所述的方法,其中所述阈值电压被配置成允许所述电池组件的安全长期存储。
106.如权利要求97所述的方法,其中所述电池组件用于向物体的至少一部分供电。
107.如权利要求106所述的方法,其中所述物体为可移动物体。
108.如权利要求107所述的方法,其中所述可移动物体为无人飞行器(UAV)。
109.如权利要求108所述的方法,其中所述电池组件机载在所述无人飞行器上。
110.如权利要求108所述的方法,其中所述电池组件用于向所述无人飞行器的推进系统供电。
111.如权利要求97所述的方法,其中所述电池管理系统被配置用于当所述电池管理系统检测到关闭所述物体电源时开启所述定时器。
112.如权利要求111所述的方法,其中所述电池管理系统被配置用于当所述电池组件正在向所述物体的所述至少一部分供电时,使所述电池组件停止通过所述自放电电路进行放电。
113.如权利要求97所述的方法,其中所述电池管理系统被配置用于当所述管理系统检测到所述电池组件处于未使用状态时开启所述定时器。
114.如权利要求97所述的方法,其中所述电池管理系统被配置用于当所述电池组件处于使用状态时,使所述电池组件停止通过所述自放电电路进行放电。
115.如权利要求97所述的方法,其中所述电池管理系统包含所述定时器。
116.如权利要求97所述的方法,其中在外壳内提供所述电池组件、自放电电路和电池管理系统。
117.如权利要求97所述的方法,其中所述阈值时间长度为至少一至十天。
118.如权利要求117所述的方法,其中所述阈值时间长度是预定的。
119.如权利要求117所述的方法,其中所述阈值时间长度是基于用户输入而设定的。
120.一种使用于向物体的至少一部分供电的多个电池组件放电的方法,所述方法包括:
从所述多个电池组件中识别符合特定自放电准则的一个或多个电池组件;以及
开启符合特定自放电准则的所述一个或多个电池组件的受控自放电;
其中所述特定自放电准则是自从关闭所述物体电源之后所经过的时间量超过阈值时间长度;
检测何时关闭所述物体电源;以及
借助于定时器,检测自从关闭所述物体电源之后所经过的时间量;
在所述一个或多个电池组件的受控自放电期间检测所述一个或多个电池组件的电压;
其中所述一个或多个电池组件的受控自放电由分别电耦合至所述一个或多个电池组件的自放电电路来执行;
还包括当所述电压达到阈值电压值时,停止所述一个或多个电池组件的受控自放电;
其中所述自放电电路包含与所述电池组件的正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时开启所述受控自放电,且当所述控制开关切换至断开状态时停止所述受控自放电。
121.如权利要求120所述的方法,还包括检测何时开启所述物体电源。
122.如权利要求120所述的方法,还包括:当开启所述物体电源时,停止所述电池组件的受控自放电。
123.如权利要求120所述的方法,还包括:检测所述一个或多个电池组件是否向所述物体的所述至少一部分供电。
124.如权利要求123所述的方法,还包括:如果所述电池组件向所述物体的所述至少一部分供电,则停止所述一个或多个电池组件的受控自放电。
125.如权利要求120所述的方法,其中所述特定自放电准则是所述一个或多个电池组件处于未使用状态达阈值时间长度。
126.如权利要求125所述的方法,还包括:借助于定时器来检测所述一个或多个电池组件何时处于未使用状态达阈值时间长度。
127.如权利要求120所述的方法,还包括:当(1)所述一个或多个电池组件处于使用状态,或(2)所述一个或多个电池组件的电压达到阈值电压值时,停止所述一个或多个电池组件的受控自放电。
128.如权利要求120所述的方法,其中所述物体为可移动物体。
129.如权利要求120所述的方法,其中所述可移动物体为无人飞行器(UAV)。
130.如权利要求129所述的方法,其中所述多个电池组件机载在所述无人飞行器上。
131.如权利要求130所述的方法,其中所述多个电池组件用于向所述无人飞行器的不同部件供电。
132.一种用于管理多个电池组件放电的设备,所述设备包含:
所述多个电池组件,其各自包含一个或多个电芯;
自放电电路,其电耦合至所述多个电池组件中的每个电池组件;和
电池管理系统,其被配置用于控制各自自放电电路的操作,以便允许所述多个电池组件中每个电池组件的受控自放电,其中所述电池管理系统被配置用于:当所述一个或多个电池组件符合特定自放电准则时,使所述一个或多个电池组件通过所述各自的自放电电路进行放电;
其中所述特定自放电准则是自从关闭所述物体电源之后所经过的时间量超过阈值时间长度;
其中所述电池管理系统被配置用于:当所述一个或多个电池组件的电压达到阈值电压值时,使所述一个或多个电池组件停止通过所述各自的自放电电路进行放电;
其中所述各自的自放电电路各自包含与所述正极端子和负极端子并联连接的自放电电阻和控制开关;
其中当所述控制开关切换至闭合状态时发生所述受控自放电,且其中当所述控制开关切换至断开状态时不发生所述受控自放电。
133.如权利要求132所述的设备,其中所述特定自放电准则是所述一个或多个电池组件处于未使用状态达阈值时间长度。
134.如权利要求132所述的设备,其中所述电池管理系统控制所述控制开关的操作。
135.如权利要求132所述的设备,其中所述多个电池组件用于向物体的至少一部分供电。
136.如权利要求135所述的设备,其中所述物体为可移动物体。
137.如权利要求136所述的设备,其中所述可移动物体为无人飞行器(UAV)。
138.如权利要求137所述的设备,其中所述多个电池组件机载在所述无人飞行器上。
139.如权利137所述的设备,其中所述多个电池组件用于向所述无人飞行器的不同部件供电。
140.如权利要求135所述的设备,其中所述电池管理系统被配置用于:当所述一个或多个电池组件向所述物体的所述至少一部分供电时,使所述一个或多个电池组件停止通过所述各自的自放电电路进行放电。
141.如权利要求140所述的设备,其中所述电池管理系统被配置用于:当所述电池组件处于使用状态时,使所述电池组件停止通过所述自放电电路进行放电。
142.一种包含如权利要求135所述的设备的无人飞行器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010102183.3A CN111262293A (zh) | 2014-12-17 | 2014-12-17 | 电池管理系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2014/094106 WO2016095129A1 (en) | 2014-12-17 | 2014-12-17 | Battery management system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010102183.3A Division CN111262293A (zh) | 2014-12-17 | 2014-12-17 | 电池管理系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106463946A CN106463946A (zh) | 2017-02-22 |
| CN106463946B true CN106463946B (zh) | 2020-03-17 |
Family
ID=56125593
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201480079442.8A Active CN106463946B (zh) | 2014-12-17 | 2014-12-17 | 电池管理系统 |
| CN202010102183.3A Pending CN111262293A (zh) | 2014-12-17 | 2014-12-17 | 电池管理系统 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010102183.3A Pending CN111262293A (zh) | 2014-12-17 | 2014-12-17 | 电池管理系统 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10797499B2 (zh) |
| EP (3) | EP3734792A3 (zh) |
| CN (2) | CN106463946B (zh) |
| WO (1) | WO2016095129A1 (zh) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160214713A1 (en) * | 2014-12-19 | 2016-07-28 | Brandon Cragg | Unmanned aerial vehicle with lights, audio and video |
| US20160304214A1 (en) * | 2015-04-20 | 2016-10-20 | Hamilton Sundstrand Corporation | Emergency power sources for propulsion systems |
| WO2017000216A1 (zh) * | 2015-06-30 | 2017-01-05 | 深圳市大疆创新科技有限公司 | 充电控制电路、充电装置、充电系统及充电控制方法 |
| EP3374263A4 (en) * | 2015-11-10 | 2019-05-08 | Matternet, Inc. | METHODS AND TRANSPORT SYSTEMS USING PILOT-FREE AIR VEHICLES |
| WO2017147763A1 (en) * | 2016-02-29 | 2017-09-08 | SZ DJI Technology Co., Ltd. | Electrical connector |
| GB2543595B (en) * | 2016-04-29 | 2018-04-18 | Tech Solutions Uk Limited | Improvements related to battery-powered electronic devices |
| GB2543596A (en) * | 2016-04-29 | 2017-04-26 | Tech Solutions (Uk) Ltd | Improvements related to battery-powered RFID readers |
| US10322688B2 (en) * | 2016-12-30 | 2019-06-18 | Textron Innovations Inc. | Controlling electrical access to a lithium battery on a utility vehicle |
| GB2563427B (en) | 2017-06-15 | 2020-04-22 | Ge Aviat Systems Ltd | High voltage battery pack and methods of manufacture |
| CN107359374B (zh) * | 2017-08-18 | 2020-04-24 | 联想(北京)有限公司 | 用于处理电池安全隐患的方法、设备和存储器设备 |
| CN108923678A (zh) * | 2018-06-28 | 2018-11-30 | 中国人民解放军空军工程大学 | 多通道机载微秒脉冲等离子体流动控制电源 |
| US11175346B2 (en) * | 2019-05-20 | 2021-11-16 | Amazon Technologies, Inc. | Power supply monitoring systems and methods using ultrasonic sensors |
| US11374415B2 (en) | 2019-05-20 | 2022-06-28 | Amazon Technologies, Inc. | Aerial vehicle fleet maintenance systems and methods |
| CN113924680A (zh) * | 2020-04-28 | 2022-01-11 | 深圳市大疆创新科技有限公司 | 电池自放电控制方法、电池、充电装置、系统及计算机可读存储介质 |
| CN111555432A (zh) * | 2020-06-01 | 2020-08-18 | 青岛海舟科技有限公司 | 波浪滑翔器低功耗电源管理系统 |
| CN114361627B (zh) * | 2020-09-07 | 2023-12-26 | 苏州清陶新能源科技有限公司 | 一种锂电池充放电方法及其装置和用途 |
| TWI789111B (zh) * | 2021-11-10 | 2023-01-01 | 新盛力科技股份有限公司 | 具有降電壓放電機制的電池管理系統及其方法 |
| WO2023107785A1 (en) * | 2021-12-06 | 2023-06-15 | Google Llc | Extending battery life after long-term and high-temperature storage |
| US11688895B1 (en) | 2022-03-10 | 2023-06-27 | Lyten, Inc. | Battery safety system for detecting analytes |
| US11597295B1 (en) | 2022-03-25 | 2023-03-07 | Beta Air, Llc | System for monitoring a battery system in-flight and a method for its use |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5479084A (en) * | 1991-07-31 | 1995-12-26 | Sanyo Electric Co., Ltd. | Battery discharging apparatus |
| CN101267124A (zh) * | 2007-03-12 | 2008-09-17 | 索尼株式会社 | 电池组 |
| CN101552453A (zh) * | 2008-03-31 | 2009-10-07 | 华硕电脑股份有限公司 | 可携式电子装置及其智能型电池的保护电路与方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5834131A (en) * | 1997-05-02 | 1998-11-10 | Itt Manufacturing Enterprises, Inc. | Self warming low cost tactical electronics battery |
| US6025699A (en) * | 1997-12-12 | 2000-02-15 | Dell Usa, L.P. | Self discharge of batteries at high temperatures |
| JP2000134811A (ja) * | 1998-10-20 | 2000-05-12 | Fujitsu General Ltd | 携帯端末装置 |
| US6531846B1 (en) * | 2001-05-03 | 2003-03-11 | National Semiconductor Corporation | Final discharge of a cell activated by a circuit that senses when a charging fault has occurred |
| US7592776B2 (en) | 2001-11-07 | 2009-09-22 | Quallion Llc | Energy storage device configured to discharge energy in response to unsafe conditions |
| US7656125B2 (en) * | 2005-07-14 | 2010-02-02 | Boston-Power, Inc. | Method and device for controlling a storage voltage of a battery pack |
| JP4734268B2 (ja) * | 2007-02-13 | 2011-07-27 | プライムアースEvエナジー株式会社 | 放電システム、および電動車両 |
| KR101093928B1 (ko) | 2009-11-26 | 2011-12-13 | 삼성에스디아이 주식회사 | 배터리 셀의 고온 스웰링을 방지할 수 있는 배터리 팩 및 그 방법 |
| CN102823107B (zh) * | 2011-03-25 | 2014-07-30 | 三洋电机株式会社 | 蓄电池系统、电动车辆、移动体、电力贮藏装置及电源装置 |
| JP5861063B2 (ja) * | 2011-10-27 | 2016-02-16 | パナソニックIpマネジメント株式会社 | 蓄電装置及び電力供給システム |
| CN203504205U (zh) | 2013-06-18 | 2014-03-26 | 中国电子科技集团公司第十八研究所 | 锂离子蓄电池组自放电均衡电路 |
| US9505493B2 (en) * | 2014-03-21 | 2016-11-29 | Brandon Borko | System for automatic takeoff and landing by interception of small UAVs |
| CN104199532B (zh) * | 2014-08-24 | 2018-02-09 | 叶露微 | 一种笔记本电脑 |
-
2014
- 2014-12-17 EP EP20178024.4A patent/EP3734792A3/en active Pending
- 2014-12-17 WO PCT/CN2014/094106 patent/WO2016095129A1/en active Application Filing
- 2014-12-17 EP EP14908164.8A patent/EP3138172B1/en not_active Not-in-force
- 2014-12-17 CN CN201480079442.8A patent/CN106463946B/zh active Active
- 2014-12-17 EP EP18187928.9A patent/EP3419134B1/en active Active
- 2014-12-17 CN CN202010102183.3A patent/CN111262293A/zh active Pending
-
2016
- 2016-12-21 US US15/387,395 patent/US10797499B2/en active Active
-
2020
- 2020-09-28 US US17/035,178 patent/US11721995B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5479084A (en) * | 1991-07-31 | 1995-12-26 | Sanyo Electric Co., Ltd. | Battery discharging apparatus |
| CN101267124A (zh) * | 2007-03-12 | 2008-09-17 | 索尼株式会社 | 电池组 |
| CN101552453A (zh) * | 2008-03-31 | 2009-10-07 | 华硕电脑股份有限公司 | 可携式电子装置及其智能型电池的保护电路与方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111262293A (zh) | 2020-06-09 |
| WO2016095129A1 (en) | 2016-06-23 |
| US20210028639A1 (en) | 2021-01-28 |
| US10797499B2 (en) | 2020-10-06 |
| EP3138172B1 (en) | 2018-09-19 |
| EP3734792A3 (en) | 2020-11-18 |
| US20170104353A1 (en) | 2017-04-13 |
| CN106463946A (zh) | 2017-02-22 |
| EP3419134B1 (en) | 2020-08-05 |
| EP3138172A1 (en) | 2017-03-08 |
| EP3419134A1 (en) | 2018-12-26 |
| EP3138172A4 (en) | 2017-05-17 |
| EP3734792A2 (en) | 2020-11-04 |
| US11721995B2 (en) | 2023-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106463946B (zh) | 电池管理系统 | |
| JP7157116B2 (ja) | バッテリー及びバッテリー付き無人機 | |
| US10906427B2 (en) | Battery and unmanned aerial vehicle with the battery | |
| CN106061788B (zh) | 回收可移动物体的电机功率的方法和系统 | |
| JP6395835B2 (ja) | Uavのバッテリー電源バックアップシステムおよび方法 | |
| CN106068592B (zh) | 无人飞行器电池更换系统及方法 | |
| US20170207640A1 (en) | Method and system for managing battery assembly | |
| WO2020156079A1 (zh) | 一种飞行器电池监控方法、装置、电池及飞行器 | |
| EP3398243B1 (en) | Multi-battery system and management thereof | |
| JP2018100088A (ja) | Uavにエネルギーを供給する方法、及びuav | |
| JP6791561B2 (ja) | Uavにエネルギーを供給する方法、及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |