CN106419961B - 声学辐射力成像中的自适应运动估计 - Google Patents
声学辐射力成像中的自适应运动估计 Download PDFInfo
- Publication number
- CN106419961B CN106419961B CN201610656184.6A CN201610656184A CN106419961B CN 106419961 B CN106419961 B CN 106419961B CN 201610656184 A CN201610656184 A CN 201610656184A CN 106419961 B CN106419961 B CN 106419961B
- Authority
- CN
- China
- Prior art keywords
- displacement
- motion
- tissue
- transducer
- physiological
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/485—Diagnostic techniques involving measuring strain or elastic properties
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5269—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving detection or reduction of artifacts
- A61B8/5276—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving detection or reduction of artifacts due to motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10132—Ultrasound image
- G06T2207/10136—3D ultrasound image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20224—Image subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
Abstract
针对声学辐射力超声波成像,获取(30)用于给定位置的多个位移轮廓。使用来自不同声学辐射力脉冲的位移来解释(36)生理和/或换能器轴向和/或横向运动。针对轴向运动,不同轮廓的位移之间的差(38)提供关于仅仅由非期望运动引起的位置处的位移期间的运动的信息。提供了用于从位移轮廓去除的非期望运动的更准确估计。针对横向运动,使用相对于给定位置而言从不同方向行进的波来获得位移轮廓。从不同轮廓估计(42)的速度的平均值(46)去除非期望的横向运动。
Description
背景技术
本实施例涉及声学辐射力成像。特别地,本实施例涉及声学辐射力成像中的运动修正。
声学辐射力成像指示组织的粘弹性质。组织位移是由从应力(诸如声学力辐射脉冲(ARFI))产生的波引起的。随时间推移而跟踪对该波的组织响应。诸如剪切波传播参数之类的组织变形参数是来自被跟踪的响应的相位或位移的二阶估计(secondary orderestimate)。
声学辐射力成像易受到运动伪像影响。患者可以移动,换能器探针可以移动和/或解剖结构可以移动。这些运动对位移和/或结果得到的参数有所贡献。结果是低质量、偏置的、低可重复性的声学辐射力成像。生理运动和换能器运动在活体内扫描期间是不可避免的,并且可引起组织力学参数的估计的大的误差。
由于使用跟踪,所以可在确定位移之前对回波数据的帧施加运动修正。运动修正可去除某些非期望畸变,但是并不处理平面外运动。可使用来自未经受由应力引起的波的组织的运动来估计非期望运动,其然后被从由波引起的位移去除。在非期望运动在波传播期间或在测量位置处不同的情况下,此去除可能是不准确的或者可能引入误差。
发明内容
通过介绍的方式,下面描述的优选实施例包括用于声学辐射力超声波成像的方法、指令和系统。获取用于给定位置的多个位移轮廓(profile)。使用来自不同声学辐射力脉冲的位移而解释生理和/或换能器轴向和/或横向运动。针对轴向运动,不同轮廓的位移之间的差提供关于仅仅由非期望运动引起的位置处的位移期间的运动的信息。提供了用于从位移轮廓去除的非期望运动的更准确估计。针对横向运动,使用相对于给定位置而言从不同方向行进的波来获得位移轮廓。从不同轮廓估计的速度的平均值去除非期望的横向运动。
在第一方面,提供了一种用于声学辐射力超声波成像的方法。换能器依次发射多个推送脉冲。该推送脉冲在患者的组织中生成波。跟踪响应于该推送脉冲的组织位移。使用响应于多个推送脉冲的位移而解释生理运动、换能器运动或生理和换能器运动。根据位移和估计的运动来估计粘弹性参数。根据粘弹性参数来生成图像。
在第二方面,提供了一种用于声学辐射力超声波成像的方法。超声系统在一位置处且响应于从在该位置的第一侧横向地间隔开的第一声学力辐射脉冲生成的第一波而获取第一组织位移。根据第一组织位移来估计该位置处的第一波的第一速度。超声系统在该位置处且响应于从沿着位置的第二侧横向地间隔开的第二声学力辐射脉冲生成的第二波而获取第二组织位移。所述第二侧不同于所述第一侧。根据第二组织位移来估计该位置处的第二波的第二速度。对第一和第二速度求平均值,并输出平均速度。
在第三方面,提供了一种用于声学辐射力超声波成像的方法。超声系统在一位置处且响应于从第一声学力辐射脉冲生成的第一波而随时间推移获取第一组织位移,并在该位置处且响应于从第二声学力辐射脉冲生成的第二波而随时间推移获取第二组织位移。从第一和第二组织位移生成随时间推移的组合位移。对该组合位移进行曲线拟合。从第一组织位移减去该曲线,并且从减法的结果获得粘弹性值。输出该粘弹性值。
本发明由随后的权利要求定义,并且不应将本部分中的内容理解为对那些权利要求的限制。下面结合优选实施例来讨论本发明的其它方面和优点,并且随后可独立地或以组合方式要求保护。
附图说明
部件和附图不一定按比例,反而重点是强调举例说明本发明的原理。此外,在图中,相同的参考标号遍及不同的视图指定相应部分。
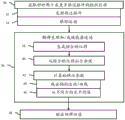
图1是用于具有轴向和/或横向运动修正的声学辐射力超声波成像的方法的一个实施例的流程图;
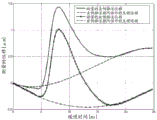
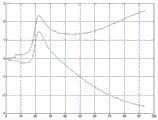
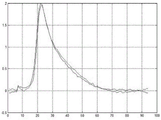
图2是示出了根据时间的示例性位移轮廓和生理运动的曲线图;
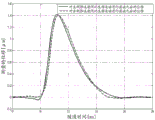
图3是示出了轴向运动修正之后的图2的示例性位移轮廓的曲线图;
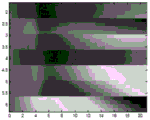
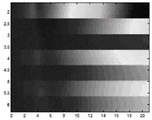
图4和5是由在感兴趣区域(ROI)的不同侧的推送脉冲所引起的各种横向间隔位置上的根据时间经过的示例性位移;
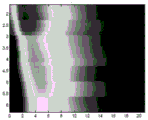
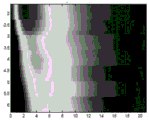
图6和7是解释生理和/或换能器轴向运动之后的图4和5的示例性位移;
图8示出了从不同的推送脉冲和非期望轴向运动得到的两个示例性位移轮廓;
图9示出了去除非期望轴向运动之后的示例性位移轮廓;以及
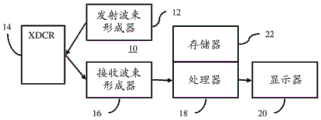
图10是用于声学辐射力超声波成像的系统的一个实施例的框图。
具体实施方式
在声学辐射力脉冲或成像(ARFI)应用中提供了自适应生理运动和换能器运动估计。自适应地估计和修正生理和/或换能器运动的轴向和横向分量。使用多个ARFI激励脉冲来将生理位移和换能器位移从ARFI诱发组织位移隔离。在一个实施例中,信号图案被生成多次并用来检测背景(生理)运动。使用ARFI激励来将组织变形生成为信号图案。生理运动在剪切波速度或其它ARFI成像中被滤除。
图1示出了用于声学辐射力超声波成像的方法。一般地,发射多个推送脉冲,并且针对位置来测量相应的多个位移轮廓。可根据位移轮廓之间的差来估计生理运动的轴向分量,并将生理运动的轴向分量从位移中去除。可通过对从由多个推送脉冲诱发的位移轮廓所估计的值(例如,速度)求平均来去除生理运动的横向分量。
用诸如针对图10描述的超声波成像系统来执行动作。使用换能器和/或波束形成器来获取数据,并且处理器根据该数据来估计位移。处理器解释非期望运动并根据结果得到的信息来估计粘弹性参数值。超声波成像系统输出粘弹性参数的值。可使用诸如计算机或检测器之类的其它装置来执行任何动作。
在图1的方法中可提供附加、不同或更少的动作。例如,不提供动作48。作为另一示例,仅执行说明动作(36—46)的仅横向运动修正(例如,动作42和46)。在另外一个示例中,仅执行说明动作(36—46)的轴向运动修正(例如,动作38—44)。
按照所述或所示顺序来执行动作。可提供其它顺序。
在动作30中,超声波系统随时间推移而获取组织位移(即,位移轮廓)。随着由ARFI(例如,推送脉冲或声学辐射脉冲激励)引起的波通过患者体内的位置,组织发生位移。通过用超声波扫描组织,获取用于随时间推移用于计算位移的数据。使用相关性或其它相似性测量,确定由在不同的时间获取的扫描所表示的位移。也确定波到达该位置之前和/或组织放松之后的位移。
获得响应于多个推送脉冲的位移轮廓。引起波响应于不同的推送脉冲而传播通过该位置。测量由每个推送脉冲生成的波所引起的位移,导致多个位移轮廓。
动作32和34提供获取组织位移的一个示例。可提供附加、不同或较少的动作以便从不同的推送脉冲获取一位置处的组织位移。
在动作32中,波束形成器生成用于聚焦超声波发射的电信号,并且换能器将电信号转换成声信号以便从换能器发射推送脉冲。使用声学辐射力。向患者体内发射声学激励。该声学激励充当用于引起位移的脉冲激励。例如,发射具有类似于或低于用于对组织进行成像的B模式发射的功率或峰值振幅水平的400循环发射波形作为声束。在一个实施例中,该发射是施加于视场的剪切波发生序列。可使用任何ARFI或剪切波成像序列。
用功率、振幅、时序或其它特性来配置该发射以在组织上引起足以使一个或更多位置处的组织发生位移的应力。例如,波束的发射焦点是相对于视场或ROI以遍及整个视场或ROI引起位移。
脉冲激励在一空间位置处生成纵向或剪切波。在激励足够强的情况下,生成波。剪切波传播通过组织比纵向波沿着声波发射方向传播更慢,因此可按时序和/或方向来区别波的类型。使用时序的差来使剪切波从纵向波隔离或者反之亦然。该波在各种方向传播,诸如垂直于施加应力方向的方向。波的位移在更接近于在该处生成波的焦点的位置处更大。随着波行进,波的量值衰减。
依次发射多个推送脉冲。在下一推送脉冲的发射之前响应于每个推送脉冲而执行动作34的跟踪。可发射任何数目的连续推送脉冲。结果,获取用于同一位置但用于不同时段的多个位移轮廓。每个位移轮廓是响应于不同的推送脉冲,但是具有相同或类似的时间采样。
在一个实施例中,使推送脉冲聚焦到不同的横向间隔位置。例如,该焦点位置在ROI或者在跟踪组织位移的位置的相对侧。ARFI被发射到横向间隔开的位置相等距离,但是在用于组织跟踪的位置的相对侧。针对二维扫描,横向间隔开的位置在方位角—轴向扫描平面中(例如,位置的左侧和右侧)。针对三维扫描,横向地间隔开的位置在任何方位角—仰角方向上的相对侧上。在使用超过两个推送脉冲的情况下,横向间隔开的焦点位置绕着一个或多个位置均匀分布以实现组织位移测量。在可替换实施例中,使用相对于一个或多个组织位移位置的非相对和/或非相等距离焦点位置。
在其它实施例中,沿着同一扫描行发射推送脉冲和/或其具有相同焦点位置。可在用于测量位移的ROI或位置的同一侧(有或没有同一焦点位置)生成多个ARFI激励脉冲。
在动作34中,跟踪组织位移。诸如系统的处理器之类的超声波系统响应于推送脉冲而跟踪位移。跟踪由传播波引起的位移。跟踪是轴向的(即,沿着扫描行一维地跟踪位移),但是可以是二维或三维跟踪。
该跟踪是随时间推移的。在一个时段内针对任何数目的时间采样找到针对该位置的组织位移,在该时段期间预期波将被该位置传播。通过跟踪每个推送脉冲,提供随时间推移的位移的组织位移轮廓。
用于跟踪的时段可包括到达该位置处的推送脉冲和/或波的发射之前的时间。同样地,用于跟踪的时段可包括在组织放松或者整个波已传播通过该位置之后的时间。例如,使K为发射激励脉冲之前或者波到达之前的参考轨迹的数目(即,在其期间扫描组织以便检测位移的时间),L为激励脉冲或波到达之后的轨迹的数目,并且M=K+L是轨迹的总数。M是足够大的,使得最后N个轨迹仅具有来自生理运动的轴向位移,并且没有来自剪切波的位移。
换能器和波束形成器在不同的时间获取回波数据以确定组织的位移。用超声波扫描来检测该位移。获得超声波数据。超声波数据中的至少某些是响应于由波或压力引起的位移。用超声波来扫描诸如感兴趣区域、整个视场或感兴趣子区域之类的区域。针对剪切波和纵向波,监视该区域以检测波。回波数据表示在不同时间受到不同量的压力的情况下的组织。该区域是任何尺寸,诸如横向的5×5mm和轴向的10mm。例如,执行B模式扫描以检测组织位移。可使用多普勒、彩色血流或其它超声波模式来检测位移。
对于给定时间,向组织或感兴趣区域发射超声波。可使用任何现在已知或以后开发的位移成像。例如,以小于720 mW/cm2的强度使用具有1—5循环持续时间的脉冲。可使用具有其它强度的脉冲。针对任何数目的扫描行来执行扫描。例如,响应于每个发射而形成二维分布的八个或十六个接收波束。在施加应力之后或同时,沿着单个发射扫描行重复地执行B模式发射并沿着相邻的接收扫描行执行接收。在其它实施例中,响应于每个发射而仅形成单个接收波束或其它数目的接收波束。可使用附加发射扫描行和相应的一个或多个接收行。可使用任何数目的重复,诸如约120次或超过15ms。
B模式强度可由于组织随时间推移的位移而改变。针对被监视扫描行,提供表示由应力引起的组织运动的时间轮廓的数据序列。通过多次执行发射和接收,接收表示处于不同时间的区域的数据。多次执行发射和接收以确定由于由应力的变化引起的位移所导致的变化。通过用超声波重复地进行扫描,确定在不同时间的组织的位置。
在一个实施例中,针对多个空间位置中的每一个或针对单个位置检测位移。例如,从接收数据检测速度、方差、强度图案的移位(例如,斑点跟踪)或其它信息作为两个时间之间的位移。可针对一个或多个位置检测进行中的或一系列的位移。
在使用B模式数据的一个实施例中,来自不同扫描的数据根据时间而轴向相关。针对每个深度或空间位置,执行多个深度或空间位置(例如,64深度的内核,中心深度是针对其计算轮廓的点)内的相关。例如,将当前数据集与参考数据集相关多次。在当前集合中识别参考集中的以给定位置为中心的数据子集的位置。执行两个数据集之间的不同的相对平移。
参考是第一或其它数据集或者来自另一扫描的数据。参考集来自应力之前,但是也可来自应力之后。同一参考被用于整个位移检测,或者参考数据在进行中或移动窗口中改变。
计算不同偏位移置中的每一个处的数据的相似性或相关性的水平。具有最大相关性的平移表示针对与和参考相比较的当前数据相关联的时间的运动矢量或偏移。
可使用任何现在已知或以后开发的相关,诸如互相关、图案匹配或绝对差的最小和。使组织结构和/或斑点相关。使用多普勒检测,杂波滤波器传递与移动组织相关联的信息。从多个回波导出组织的速度。该速度被用来确定朝向或远离换能器的位移。替换地,不同位置处的速度之间的相对或差可指示应变或位移。
图2示出了针对一位置的随时间推移的位移的两个示例性位移轮廓。示出了来自参考数据的随时间推移的运动矢量的距离的振幅。分析的时段超过约25毫秒,但是可以更长或更短(例如,在4.8 kHz采样率下12毫秒)。其它位移轮廓是可能的。可针对位移测量任何数目的位置,诸如在10×5mm感兴趣区域中每毫米进行测量或者针对仅一个位置进行测量。测量针对每个位置和针对每个采样时间的位移。如图2中所示,使用多个推送脉冲和相应跟踪来获取用于每个位置的多个位移轮廓。可针对任何其它位置计算类似轮廓。
将随着时间和/或空间过去的位移用于计算。在一个实施例中,将用于不同深度的位移组合,留下在方位角和/或仰角方面间隔开的位移。例如,在深度上对用于给定扫描行或横向位置的位移求平均值。作为求平均值的替换,使用最大或其它选择准则来确定用于给定横向位置的位移。可使用用于仅一个深度的位移。可独立地使用用于不同深度的位移。
再次地参考图1,超声波系统或处理器使用响应于多个推送脉冲的位移而解释生理运动、换能器运动或生理和换能器运动。此非期望运动具有轴向和横向分量。该解释是针对这些分量中的任何一者或两者。使用来自不同推送脉冲的位移来解释由除由推送脉冲产生的波之外的力引起的横向运动和/或轴向运动。
动作38—46被示为解释非期望运动。动作中的一个或多个可服务于附加目的。例如,执行动作42,无论运动是否被修正。可提供附加、不同或更少的动作以解释非期望或非波运动。
解释轴向运动独立于解释横向运动。可将轴向运动从位移轮廓的位移去除(例如,动作38、40以及44)。可通过对根据不同位移轮廓计算的粘弹性参数求平均来去除横向运动(例如,动作46)。在其它实施例中,该解释可仅针对轴向运动或者仅针对横向运动。在图1的实施例中,去除非期望轴向和横向运动两者。
在动作38中,将响应于不同推送脉冲的随时间推移的位移组合。诸如通过使一个轮廓在时间方面相对于另一个移位以获得最佳匹配来使轮廓在时间上对准。在其它方法中,在相同时间对峰值进行识别和定位。
一旦被对准,将针对每个时间的位移量值组合。可使用任何组合,诸如加和、求平均值或比。在一个实施例中,从用于一个轮廓的随时间推移的位移减去用于另一轮廓的随时间推移的位移或与其求差值。该组合去除或减少对ARFI诱发波的位移的贡献。
可将来自生理和/或换能器运动的位移的轴向分量建模为n阶的多项式。例如,将来自非期望运动的位移建模为三阶多项式。在给定位置处跟踪的轴向位移由下式给定:

其中,yl(t)和yr(t)是分别地左(l)和右(r)激励(即,在ROI的相对侧的推送脉冲)之后的时间t处的测量轴向位移。下标l和r分别地表示左和右。由ARFI激励脉冲诱发的轴向位移是x(t),其一般地对于左激励和右激励两者而言是相同的。用多项式对生理和换能器轴向位移进行建模,该多项式的系数由al、bl、cl、dl、以及ar、br、cr、dr给出。
等式1具有两个部分,一个针对时间i=K+1 : M - N,在其期间位移包括对ARFI生成波的响应(即,具有x(t)的部分),并且一个针对时间i=M - N+1:M,在其期间,位移不包括ARFI生成波(即,没有x(t)的部分)。等式2具有相同分区。K和N的时间间隔或值可以是预定的。
使用位移轮廓的比、差或其它组合甚至针对位移包括对ARFI生成波的响应的时间的期间来去除x(t)。例如,通过用等式1减去等式2,将随时间推移的差值ydiff(t)提供为:

其也是三阶的多项式。此差值表示在ARFI诱发波的传播期间发生的运动,但是不包括来自ARFI诱发波的位移。结果,该差提供波传播时间及其它时间期间的生理和/或换能器运动信息。
在动作40中,曲线拟合到组合位移(例如,针对1:M的ydiff(t))。确定模型的多项式的系数,诸如确定al、bl、cl、dl、以及ar、br、cr、dr。
该曲线可另外拟合到其它位移,诸如来自针对未经受来自ARFI诱发波的运动的时间的不同轮廓的位移(例如,等式1和2中的每一个的部分2—时间1:K和M - N:N)。系数al、bl、cl、dl和ar、br、cr、dr是根据用于响应于推送脉冲的时间的推送脉冲之间的组织位移的差和用于非响应于推送脉冲的时间的轮廓的差和组织位移来确定的。
可使用任何曲线拟合。在一个实施例中,通过使用最小二乘法来求解以估计多项式系数。将多项式模型最小二乘拟合到针对响应于不同ARFI诱发波的时间的组合的组织位移和来自针对非响应于ARFI诱发波的时间的轮廓的组织位移。例如,使用以下最小二乘拟合来找到用于表示由于换能器、生理或换能器和生理轴向运动所导致的位移的曲线的系数:

在此矩阵中,顶部的行是基于组合位移,并且较低的行是基于来自单独轮廓的位移,但是仅针对在其期间运动未经受ARFI诱发波影响或由未被其引起的时间。通过使用组合位移(例如,ydiff(t)),将用于拟合的测量结果的数目有效地增加至M个样本。多项式系数的估计可以更加准确,导致与仅用单独位移轮廓的时间限制位移进行估计(即,仅使用在上述矩阵中记录的yl和yr值)的情况相比由生理和换能器运动引起的轴向位移的更好估计。
由估计系数定义的曲线表示没有ARFI诱发运动的情况下的由于生理和/或换能器运动而引起的位移。结果,提供了随时间推移的非期望轴向运动。
针对横向运动,该解释是粘弹性参数的计算的一部分。动作42的计算包括用于估计轴向运动的修正和横向运动的效果的去除。
在动作42中,处理器计算粘弹性参数的一个或多个值。可计算任何粘弹性参数,诸如应变、应变率、杨氏模数、弹性或其它性质。在一个实施例中,将剪切速度计算为粘弹性参数。
针对ROI中的一个或多个位置中的每一个计算该值。例如,针对单个用户选择点计算该值。作为另一示例,计算用于ROI中的各种横向间隔位置的值。
根据一个或多个位移轮廓来估计该值。虽然两个或更多位移轮廓可用于每个位置,但仅一个可被用于估计粘弹性参数值。其它的被用于运动修正。替换地,估计来自单独位移轮廓的单独估计并用来确定针对该位置的值。
在一个实施例中为了估计该值,确定轮廓中的峰值或最大振幅。基于该位置距应力的源(例如,ARFI焦点位置)的距离,应力的施加与峰值振幅之间的时间差指示速度。在替换方法中,使来自不同位置的位移轮廓相关以找到位置之间的延迟。此相移可用来计算与相关轮廓相关联的位置之间的速度。在其它实施例中,根据位移轮廓来计算分析数据,并且使用相移来确定弹性。不同体素(voxel)的位移的随时间推移的相位差或用于给定体素的相位的过零指示速度。该速度可用来确定其它粘弹性参数,诸如使用剪切速度和已知或测量的应力量来确定杨氏模数。
粘弹性参数值的计算是运动修正的函数。动作44和46分别地提供轴向和横向运动修正。
在动作44中,通过改变一个或多个位移轮廓来修正轴向运动,所述一个或多个位移轮廓然后被用来计算粘弹性参数值。从一个或多个位移轮廓去除非期望轴向运动。从测量位移轮廓减去表示用于给定轮廓的建模的生理和/或换能器运动的曲线。在建模估计用于每个位移轮廓的系数的情况下,从各位移轮廓减去相应曲线。
图2示出了用于相应的两个位移轮廓的两个估计生理运动。针对每个时间,该曲线提供由于生理运动而引起的轴向运动量。测量的位移轮廓包括生理轴向运动和ARFI诱发波运动。通过减去生理轴向运动,结果得到的位移轮廓是没有非期望运动的ARFI诱发的波运动的。使用等式1和2,通过用测量位移y(t)减去多项式来估计由ARFI激励脉冲引起的轴向位移x(t)。针对每个时间,从测量位移减去来自生理和/或换能器运动的轴向位移。图3示出了运动修正之后(即,在进行滤波(针对每个时间的减法)以去除非期望轴向运动)的用于ARFI诱发波运动的结果得到的位移轮廓。
在去除非期望轴向运动之后,计算粘弹性参数的值。针对剪切速度,使用峰值或定相来确定该值。根据减法的结果或者根据被修正以去除由于生理和/或换能器运动而引起的轴向运动的位移轮廓来估计该值。
在根据针对位置的每个不同轮廓来计算该值的情况下,可对结果得到的值求平均。替换地,使用选择(例如,最大值、最小值或中值)。在其它实施例中,针对轮廓中的每一个执行轴向运动修正,并且根据结果得到的位移轮廓来计算单个值。
在图1的动作46中,在值的计算中减少非期望横向运动的影响。生理和/或换能器运动的横向分量的减少还利用在ROI的任一侧上的多个ARFI激励脉冲。使用响应于在位置的相对侧上的ARFI激励的测量的位移。使用围绕着ROI或单个位置相等地或者以其他方式分布的ARFI激励。
分别给定跟踪脉冲的脉冲重复频率(PRF)和脉冲重复间隔(PRI),从计算中去除在时间间隔T内的横向方向上的生理和换能器运动速度。该时间间隔T由下式给定:
T = 2(PRI _M + texcitation) (5)
其中,texcitation是ARFI激励的持续时间,并且M是每个ARFI激励之前和之后的轨迹或跟踪扫描的总数。因数2起因于使用两个ARFI激励,导致两个位移轮廓。假设生理运动的横向速率在间隔T内是恒定的(即由于生理运动而引起的横向位移在间隔T内是线性的)。
横向运动是相对于位置的两个方向中的一个(例如,左或右)。由于提供了用于计算从在那些方向中的每一个上行进的波得到的粘弹性参数值的位移轮廓,所以结果得到的值以相反的方式受到非期望横向运动的影响。处理器根据不同推送脉冲的组织位移来计算用于粘弹性参数的不同值。例如,根据一个位移轮廓来估计一个剪切速度,并且根据另一位移轮廓来估计用于同一位置的另一剪切速度。使vs为剪切波的速率,vm为横向方向上的生理和换能器运动的组合速率,vsl是来自左侧激励的测量剪切波,vsr是来自右侧激励的测量剪切波,并且x是从激励位置到跟踪位置的距离。X将被视为对于左速率和右速率而言是相等的,但是在其它实施例中可能不相等。到达距离左激励位置和右激励位置的横向距离x处的波由下式给定:


等式6和7示出如果运动是在剪切波传播的方向上,则剪切波较早到达,并且如果运动在剪切波传播的相反方向上,则较晚到达。
根据各自的位移轮廓来计算左激励速度vsl和右激励速度vsr。由ARFI激励引发的剪切波的速率是vs,并且生理和换能器运动的横向速率是vm,用下式表示:


等式8是平均值。针对位置的剪切速度是根据用于相反方向上诱发波传播的位移轮廓计算的针对该位置的剪切速度的平均值。通过使用相反方向,平均值抵消或减少非期望横向运动的影响。对不同的值求平均值的结果是用于粘弹性参数的最终值,诸如被用作用于位置的剪切速度的平均速度。
等式9表示非期望横向运动。此非期望横向运动被计算或未被计算。通过对用于在相反方向上传播的剪切波的速度求平均值来去除由换能器和/或生理运动引起的此非期望横向速度。替换地,计算并从速度估计中的一个或多个去除(即,减去)非期望速度。
在动作48中,输出粘弹性值。在一个实施例中,输出图像。在解释非期望横向和/或轴向运动之后,估计用于不同位置的值。通过并行接收波束形成和/或针对不同的位置重复整个过程(例如,ARFI的发射和跟踪)来确定针对ROI中的位置的值。根据空间或位置的这些值被映射到用于显示弹性或剪切图像的图像值。可使用任何现在已知或以后开发的弹性成像。例如,生成剪切波、纵向波、应变或其它图像。生成一个图像或图像序列。
单独地显示弹性或剪切图像。替换地,邻近于弹性图像显示表示同一区域或不同视场的B模式或其它图像。在另一可替换实施例中,将弹性或剪切图像与B模式图像组合或覆盖在其上面。
在另一实施例中,将针对位置的值输出为文本、数字或者图表中的编码。例如,用户选择B模式图像上的位置。作为响应,超声波系统计算用于对于该选定位置而言感兴趣的粘弹性参数的值。在B模式图像上覆盖计算值的数值的、文本的和/或图形的表示,独立地限制或者另外传送给用户。在其它实施例中,输出是通过在网络上的传输和/或提供给存储器以便存储。
图2—9示出了来自非期望轴向运动的去除的示例性结果。使用在虚拟触摸量化(VTQ)模式(即,针对用户选定点的剪切速度估计)中获得的活体内肝数据来去除来自生理和换能器运动的轴向位移。图2示出了在活体内扫描期间在给定横向位置处测量的位移轮廓的示例。图2还示出了根据等式4来运行最小二乘法算法之后拟合的多项式曲线。图3示出了对来自生理运动的轴向位移进行滤波之后的来自左激励脉冲和右激励脉冲的位移轮廓。在其它实施例中,位移轮廓是来自被聚焦到同一位置的但在不同的时间的推送脉冲。
图4和5分别地示出了用于在ROI的相对侧推送脉冲的位移映射(displacementmap)。横轴是时间,并且竖轴是横向间距。针对用于跟踪的每个发射波束,在给定深度处对四个接收波束进行采样。结果,用于每四个横向间隔位置的测量同时发生。针对每组的四个位置重复推送脉冲的发射和相应跟踪,导致图4和5的水平条纹外观。由于来自生理运动的轴向位移,用于各种位置的峰值的发生时间被部分地隐藏且跨各位置不如期望的那么一致。
图6和7分别地示出了在去除由生理运动引起的轴向位移之后的图4和5的位移映射(即,针对相对侧激励)。减少或去除生理和换能器运动的轴向分量,导致用于每个位置的随时间推移的峰值的更清楚指示和跨各位置的更多一致性。在从位移去除非期望轴向运动的情况下,剪切速度或其它粘弹性参数值更有可能是准确的或者以更大的置信度计算。
图8示出了通过向在ROI的左侧(即,测量位置的左侧)的同一焦点位置(在不同时间)发射两个ARFI激励脉冲而在给定横向位置处测量的两个位移轮廓的示例。两个轮廓是不同的,因为生理运动随时间变化,并且顺序地执行ARFI激励脉冲和关联跟踪。图9示出了对来自生理运动的轴向位移进行滤波之后的位移轮廓。向用于所有时间的差分位移和用于在ARFI激励之前和组织松弛之后的时间的单独位移拟合非期望位移的曲线。从测量位移减去拟合曲线。图9示出算法准确地去除生理和换能器运动的轴向分量。
为了测试来自生理和/或换能器运动的横向位移,线性台阶在仿组织体模(tissue-mimicking phantom)的表面上使换能器阵列横向地以恒定速度平移。此布置模仿横向换能器运动。非期望横向位移可以是由于换能器运动(例如,使换能器旋转和/或平移的超声医师)、患者运动(例如,促使换能器相对于患者移动)或生理运动引起的。在测试布置中的换能器阵列的横向运动期间,在使用在位置的相对侧的推送脉冲的用户选定位置处测量位移。来自从一侧测量的位移的测量剪切速度高于来自从相对侧测量的位移的测量剪切速度。通过使换能器移动的方向反向,具有较高剪切速度的一侧改变。非期望横向运动由于移动方向而增加一个速度并减小另一个,因此求平均值减少了非期望横向运动的影响。
图10示出了用于声学辐射力超声波成像的系统10的一个实施例。系统10实施图1的方法或其它方法。系统10包括发射波束形成器12、换能器14、接收波束形成器16、图像处理器18、显示器20以及存储器22。可提供附加、不同或更少部件。例如,提供用户输入以实现与系统的用户交互,从而选择对于其而言将发生测量的位置。
系统10是医学诊断超声波成像系统。系统10被配置成使用多个推送脉冲来获取用于剪切或其它弹性成像的回波数据。在可替换实施例中,系统10是个人计算机、工作站、PACS站或者在同一位置处或者分布在网络上以实现实时或后获取成像的其它布置。系统10从存储器或另一超声波成像系统获取数据。
发射波束形成器12是超声波发射机、存储器、脉冲发生器、模拟电路、数字电路或其组合。发射波束形成器12可操作用于以不同和/或相对振幅、延迟和/或定向生成用于多个通道的波形。在响应于生成的电波形而从换能器14发射声波时,形成一个或多个波束。生成发射波束序列以扫描一个区域。可使用Sector、Vector®、线性或其它扫描格式。同一区域被扫描多次。针对血流或多普勒成像或者针对剪切成像,使用沿着一个或多个相同线的扫描序列。在多普勒成像中,该序列可包括在扫描相邻扫描行之前沿着同一扫描行的多个波束。针对剪切或纵向波成像,可使用扫描或帧交织(即在再次地扫描之前扫描整个区域)。可使用线或线交织组(line or group of line interleaving)。在可替换实施例中,发射波束形成器12生成平面波或发散波以实现更快速的扫描。
同一发射波束形成器12可生成脉冲激励或电波形以便生成用以引起位移的声能。生成用于声学辐射力脉冲的电波形。在可替换实施例中,提供不同的发射波束形成器以便生成脉冲激励。发射波束形成器12促使换能器14生成推送脉冲或声学辐射力脉冲。使用跨通道的延迟轮廓,发射波束形成器12将推送脉冲引导至一个或多个期望焦点位置。
换能器14是用于从电波形生成电能的阵列。针对阵列,相对延迟使声能聚焦。给定发射事件对应于在给定延迟的情况下由不同元件在基本上相同的时间进行的声能发射。发射事件可提供用于使组织发生位移的超声波能量的脉冲。该脉冲是脉冲激励或跟踪脉冲。脉冲激励包括具有许多循环(例如,500循环)但在相对短的时间内发生而在较长的时间内引起组织位移的波形。跟踪脉冲可以是B模式发射,诸如使用1—5个循环。跟踪脉冲被用来扫描经历应力变化的患者的部位。
换能器14是压电或电容薄膜元件的1维、1.25维、1.5维、1.75维或2维阵列。可使用摆轮(wobbler)阵列。换能器14包括用于在声能与电能之间进行换能的多个元件。响应于超声波能(回波)撞击在换能器14的元件上而生成接收信号。元件与发射和接收波束形成器12、16的通道连接。
接收波束形成器16包括具有放大器、延迟和/或相位旋转器以及一个或多个加法器的多个通道。每个通道与一个或多个换能器元件相连。接收波束形成器16被硬件或软件配置成施加相对延迟、相位和/或切趾法以响应于每个成像或跟踪发射而形成一个或多个接收波束。接收操作针对来自被用来使组织发生位移的脉冲激励的回波可以不发生。接收波束形成器16使用接收信号输出表示空间位置的数据。来自不同元件的信号的相对延迟和/或定相和加和提供波束形成。在可替换实施例中,接收波束形成器16是用于使用傅立叶或其它变换来生成样本的处理器。
接收波束形成器16可包括滤波器,诸如用于相对于发射频带将处于二次谐波或其它频带的信息隔离的滤波器。此类信息可更有可能包括期望的组织、造影剂和/或运动信息。在另一实施例中,接收波束形成器16包括存储器或缓冲器和滤波器或加法器。两个或更多接收波束被组合以将处于期望频带(诸如二次谐波、三次基波或其它波段)的信息隔离。
与发射波束形成器12相协调,接收波束形成器16在不同的时间生成表示ROI的数据。在声学脉冲激励之后,接收波束形成器16在不同的时间生成表示沿着一个或多个线的位置的波束。通过用超声波扫描ROI,生成数据(例如,波束形成样本)。通过重复扫描,获取在脉冲激励的不同时间表示所述区域的超声波数据。
接收波束形成器16输出表示一个或多个空间位置的波束加和数据。可提供动态聚焦。数据可用于不同的目的。例如,针对B模式或组织数据执行与针对ARFI超声波成像不同的扫描。替换地,还使用B模式数据来确定粘弹性参数值。作为另一示例,用一系列共享扫描获取用于剪切成像的数据,并且单独地或者使用某些相同的数据来执行B模式或多普勒扫描。超声波或回波数据来自处理的任何阶段,诸如检测之前的波束形成数据或者检测之后的数据。
处理器18是B模式检测器、多普勒检测器、脉冲波多普勒检测器、相关处理器、傅立叶变换处理器、专用集成电路、通用处理器、控制处理器、图像处理器、现场可编程门阵列、图形处理单元、数字信号处理器、模拟电路、数字电路其组合或者用于检测并处理来自波束形成超声波样本的用于显示的信息的现在已知或后来开发的设备。
在一个实施例中,处理器18包括一个或多个检测器和单独处理器。单独处理器是控制处理器、通用处理器、数字信号处理器、专用集成电路、现场可编程门阵列、网络、服务器、处理器组、图形处理单元、数据路径、其组合或者用于针对粘弹性参数的值的运动修正和/或计算的其它现在已知或后来开发的设备。可估计剪切波传播的衰减、剪切模量、剪切粘度、剪切速率或一个或多个其它性质。例如,单独处理器被用硬件和/或软件配置成执行图1中所示的动作36—48中的一个或多个的任何组合。
处理器18被配置成估计由声学脉冲激励诱发的组织位移。使用相关性、跟踪、运动检测或其它位移测量,估计组织的位置移位的量。通过一定时段(诸如从由于应力而引起的组织移动之前、在应力期间以及到组织已大部分或完全返回到松弛状态(例如,从由脉冲激励引起的应力恢复)之后)多次执行估计。位置之间的组织的移位的差指示相对硬度或弹性。
处理器18被配置成将来自不同轮廓的位移组合,诸如用一个位移轮廓减去另一个。使用组合位移,处理器18被配置成拟合曲线以便对由于除ARFI诱发波之外的源而引起的轴向位移进行建模。由处理器18从测量位移轮廓减去该曲线以将由于ARFI诱发波而引起的位移隔离。
处理器18被配置成估计粘弹性参数值。可使用相变检测、相关、位移确定、峰值识别、速度计算、应力测量、应力衰减和/或其它过程来估计弹性、速度、模数或其它参数。处理器18被配置成在估计中解释非期望横向和/或轴向运动。通过从位移轮廓减去非期望轴向运动,估计值可更多地表示ARFI诱发运动。通过对来自用在相对侧的推送脉冲生成的位移轮廓的值的估计求平均值,结果得到的值可具有较少的非期望横向运动。
处理器18被配置成生成一个或多个图像。例如,生成剪切波速度图像。可生成其它弹性照相图像,诸如剪切模量、应变或应变率图像。该图像被呈现为B模式图像内的覆盖图或感兴趣区域。弹性值调制感兴趣区域中的各位置处的色彩。在弹性值在阈值以下的情况下,可在没有用弹性值进行的调制的情况下显示B模式信息。替换地或另外,作为文本、以数值方式和/或在图表中显示用于一个或几个位置的值。
处理器18依照存储在存储器22或另一存储器中的指令来操作以实现声学辐射力超声波成像。存储器22是非临时计算机可读存储介质。在计算机可读存储介质或存储器(诸如高速缓存器、缓冲器、RAM、可移动介质、硬驱或其它计算机可读存储介质)上提供用于实施本文所讨论的过程、方法和/或技术的指令。计算机可读存储介质包括各种类型的易失性和非易失性存储介质。响应于存储在计算机可读存储介质中或上面的一个或多个指令集而执行图中所图示或本文所描述的功能、动作或任务。该功能、动作或任务与特定类型的指令集、存储介质、处理器或处理策略无关,并且可由单独地或以组合方式操作的软件、硬件、集成电路、固件、微代码等执行。同样地,处理策略可包括多重处理、多重任务、并行处理等。在一个实施例中,将指令存储在可移动介质设备上以便被本地或远程系统读取。在其它实施例中,指令被存储在远程位置上以便通过计算机网络或通过电话线传输。在其它实施例中,指令被存储在给定计算机、CPU、GPU或系统内。
显示器20是CRT、LCD、投影仪、等离子体显示器或用于显示值、二维图像或三维表示的其它显示器。二维图像表示区域(诸如平面)中的空间分布。三维表示是从表示体积中的空间分布的数据呈递的。由处理器18或其它设备用要显示为图像的信号的输入来配置显示器20。显示器20显示表示用于ROI的计算值的图像。
虽然上文已通过参考各种实施例描述了本发明,但应理解的是在不脱离本发明的范围的情况下可进行许多变更和修改。因此意图在于将前文的详细描述视为说明性而非限制性的,并且应理解的是意图定义本发明的精神和范围的是以下权利要求,包括所有等价物。
Claims (5)
1.一种用于声学辐射力超声波成像的方法,该方法包括:
从换能器依次发射(32)多个推送脉冲,该推送脉冲在患者的组织中生成(48)波;
响应于推送脉冲而跟踪(34)组织位移;
使用响应于多个推送脉冲的组织位移而解释(36)生理运动、换能器运动或生理和换能器运动,所述解释包括:
估计轴向运动,所述轴向运动由所述生理运动、所述换能器运动或所述生理和换能器运动引起,并且所述估计包括:
将多项式拟合到针对响应于推送脉冲的时间的组织位移与针对非响应于推送脉冲的时间的组织位移的差;
根据位移和估计的轴向运动来计算(42)粘弹性参数;以及
根据粘弹性参数来生成(48)图像。
2.根据权利要求1所述的方法,其中,发射(32)包括在感兴趣区域的第一侧上发射(32)推送脉冲中的至少第一个,并且在感兴趣区域的与第一侧相对的第二侧上发射(32)推送脉冲中的至少第二个。
3.根据权利要求1所述的方法,其中,计算(42)包括从随时间推移而跟踪的位移减去(44)随时间推移的轴向运动,并且根据减去(44)的结果来计算(42)粘弹性参数。
4.根据权利要求1所述的方法,其中,解释(36)包括解释(36)横向运动,并且其中,计算(42)包括减少计算(42)中的横向运动的影响。
5.根据权利要求4所述的方法,其中,解释(36)和计算(42)包括根据不同推送脉冲的组织位移来计算(42)用于粘弹性参数的不同值,并且对所述不同值求平均值(46),求平均值(46)的结果是计算的粘弹性参数。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/823957 | 2015-08-11 | ||
| US14/823,957 US10582911B2 (en) | 2015-08-11 | 2015-08-11 | Adaptive motion estimation in acoustic radiation force imaging |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106419961A CN106419961A (zh) | 2017-02-22 |
| CN106419961B true CN106419961B (zh) | 2020-09-15 |
Family
ID=57908366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201610656184.6A Active CN106419961B (zh) | 2015-08-11 | 2016-08-11 | 声学辐射力成像中的自适应运动估计 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10582911B2 (zh) |
| KR (1) | KR101983126B1 (zh) |
| CN (1) | CN106419961B (zh) |
| DE (1) | DE102016114783A1 (zh) |
| FR (1) | FR3039981B1 (zh) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018191145A1 (en) * | 2017-04-09 | 2018-10-18 | Indiana University Research And Technology Corporation | Motion correction systems and methods for improving medical image data |
| EP3424434A1 (en) * | 2017-07-07 | 2019-01-09 | Koninklijke Philips N.V. | Method and device for processing ultrasound signal data |
| CN107505233A (zh) * | 2017-07-21 | 2017-12-22 | 无锡海斯凯尔医学技术有限公司 | 介质粘弹性定量方法及装置 |
| CN107440740B (zh) * | 2017-07-21 | 2021-06-25 | 无锡海斯凯尔医学技术有限公司 | 介质粘弹性定量方法及装置 |
| CN107505232B (zh) * | 2017-07-21 | 2019-09-03 | 无锡海斯凯尔医学技术有限公司 | 运动信息获取方法及装置 |
| US11154277B2 (en) | 2017-10-31 | 2021-10-26 | Siemens Medical Solutions Usa, Inc. | Tissue viscoelastic estimation from shear velocity in ultrasound medical imaging |
| US11464495B2 (en) * | 2018-03-13 | 2022-10-11 | Siemens Medical Solutions Usa, Inc. | Adaptive clutter filtering in acoustic radiation force-based ultrasound imaging |
| CN116869567A (zh) * | 2018-05-15 | 2023-10-13 | 深圳迈瑞生物医疗电子股份有限公司 | 一种剪切波弹性测量方法及剪切波弹性成像系统 |
| JP7128693B2 (ja) | 2018-09-10 | 2022-08-31 | 富士フイルムヘルスケア株式会社 | 超音波診断装置、及びそれに用いる探触子 |
| CN110613484B (zh) * | 2019-09-26 | 2021-02-19 | 无锡海斯凯尔医学技术有限公司 | 一种组织弹性检测方法及设备 |
| CN110613485B (zh) * | 2019-09-26 | 2021-03-23 | 无锡海斯凯尔医学技术有限公司 | 一种组织弹性检测方法及设备 |
| CN110927729B (zh) * | 2019-11-09 | 2022-04-01 | 天津大学 | 基于位移衰减特性的声辐射力脉冲弹性成像方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8118744B2 (en) * | 2007-02-09 | 2012-02-21 | Duke University | Methods, systems and computer program products for ultrasound shear wave velocity estimation and shear modulus reconstruction |
| US7999945B2 (en) * | 2007-07-18 | 2011-08-16 | The George Washington University | Optical coherence tomography / acoustic radiation force imaging probe |
| US8187187B2 (en) * | 2008-07-16 | 2012-05-29 | Siemens Medical Solutions Usa, Inc. | Shear wave imaging |
| US9364194B2 (en) | 2008-09-18 | 2016-06-14 | General Electric Company | Systems and methods for detecting regions of altered stiffness |
| US8398550B2 (en) * | 2008-12-01 | 2013-03-19 | The Board Of Trustees Of The University Of Illinois | Techniques to evaluate mechanical properties of a biologic material |
| US8147410B2 (en) | 2009-03-23 | 2012-04-03 | The Hong Kong Polytechnic University | Method and apparatus for ultrasound imaging and elasticity measurement |
| JP2012529962A (ja) * | 2009-06-19 | 2012-11-29 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 粘弾性媒質を撮像するための結像系 |
| US20110060221A1 (en) | 2009-09-04 | 2011-03-10 | Siemens Medical Solutions Usa, Inc. | Temperature prediction using medical diagnostic ultrasound |
| US9351707B2 (en) * | 2010-04-05 | 2016-05-31 | Hitachi Aloka Medical, Ltd. | Methods and apparatus to determine shear wave propagation property |
| WO2011153268A2 (en) * | 2010-06-01 | 2011-12-08 | The Trustees Of Columbia University In The City Of New York | Devices, methods, and systems for measuring elastic properties of biological tissues |
| CN101869485B (zh) * | 2010-06-23 | 2012-07-04 | 深圳大学 | 超声成像方法及装置 |
| CN101912278A (zh) * | 2010-08-12 | 2010-12-15 | 陈庆武 | 超声动态弹性成像探头及方法 |
| US8727995B2 (en) | 2010-09-09 | 2014-05-20 | Siemens Medical Solutions Usa, Inc. | Reduction of motion artifacts in ultrasound imaging with a flexible ultrasound transducer |
| CN103260525B (zh) | 2010-12-13 | 2015-07-15 | 皇家飞利浦电子股份有限公司 | 针对背景运动影响调节声辐射力效应的测量结果 |
| US9237878B2 (en) | 2011-04-22 | 2016-01-19 | Mayo Foundation For Medical Education And Research | Generation and assessment of shear waves in elasticity imaging |
| US8532430B2 (en) | 2011-07-28 | 2013-09-10 | General Electric Company | Methods for reducing motion artifacts in shear wave images |
| US10357226B2 (en) * | 2012-03-12 | 2019-07-23 | Mayo Foundation For Medical Education And Research | System and method for model-independent quantification of tissue viscoelastic properties using ultrasound |
| CN103300890B (zh) | 2012-03-16 | 2016-06-08 | 通用电气公司 | 用于测量组织机械特性的系统及方法 |
| CN104203112B (zh) | 2012-12-25 | 2017-06-20 | 株式会社日立制作所 | 超声波诊断装置以及弹性评价方法 |
| US9883852B2 (en) | 2013-03-18 | 2018-02-06 | Duke University | Ultrasound systems, methods and computer program products for estimating tissue deformation with harmonic signals |
| CN103519848A (zh) * | 2013-10-25 | 2014-01-22 | 中国科学院深圳先进技术研究院 | 基于超声回波射频信号的组织位移估算方法和系统 |
| US10390796B2 (en) * | 2013-12-04 | 2019-08-27 | Siemens Medical Solutions Usa, Inc. | Motion correction in three-dimensional elasticity ultrasound imaging |
| CN104055541A (zh) * | 2014-06-26 | 2014-09-24 | 中国科学院苏州生物医学工程技术研究所 | 一种用于血管内超声多断层剪切波弹性成像方法 |
-
2015
- 2015-08-11 US US14/823,957 patent/US10582911B2/en active Active
-
2016
- 2016-08-03 FR FR1670434A patent/FR3039981B1/fr active Active
- 2016-08-10 DE DE102016114783.4A patent/DE102016114783A1/de active Pending
- 2016-08-10 KR KR1020160101712A patent/KR101983126B1/ko active IP Right Grant
- 2016-08-11 CN CN201610656184.6A patent/CN106419961B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| FR3039981A1 (zh) | 2017-02-17 |
| CN106419961A (zh) | 2017-02-22 |
| DE102016114783A1 (de) | 2017-02-16 |
| KR101983126B1 (ko) | 2019-05-28 |
| FR3039981B1 (fr) | 2020-01-03 |
| US20170042511A1 (en) | 2017-02-16 |
| US10582911B2 (en) | 2020-03-10 |
| KR20170019327A (ko) | 2017-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106419961B (zh) | 声学辐射力成像中的自适应运动估计 | |
| CN104688266B (zh) | 三维弹性超声成像中的运动修正 | |
| US8961418B2 (en) | Solving for shear wave information in medical ultrasound imaging | |
| EP2926739B1 (en) | Acquisition control for elasticity ultrasound imaging | |
| US8992426B2 (en) | Feedback in medical ultrasound imaging for high intensity focused ultrasound | |
| US11154277B2 (en) | Tissue viscoelastic estimation from shear velocity in ultrasound medical imaging | |
| CN104510499B (zh) | 医学超声成像中的剪切波检测 | |
| US10338203B2 (en) | Classification preprocessing in medical ultrasound shear wave imaging | |
| US8801614B2 (en) | On-axis shear wave characterization with ultrasound | |
| US20140276058A1 (en) | Fat Fraction Estimation Using Ultrasound with Shear Wave Propagation | |
| US11006928B2 (en) | Sound speed imaging using shear waves | |
| CN106955125B (zh) | 声学辐射力脉冲成像中的运动无关性 | |
| CN110893103A (zh) | 用于基于超声的剪切波成像的角度 | |
| US11452503B2 (en) | Shear wave imaging based on ultrasound with increased pulse repetition frequency | |
| EP2853918B1 (en) | Shear wave detection in medical ultrasound imaging | |
| US11963824B2 (en) | Shear wave imaging based on ultrasound with increased pulse repetition interval |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |