CN101968367A - Multifunctional networking digital shaft angle converter and converting method thereof - Google Patents
Multifunctional networking digital shaft angle converter and converting method thereof Download PDFInfo
- Publication number
- CN101968367A CN101968367A CN2010101490669A CN201010149066A CN101968367A CN 101968367 A CN101968367 A CN 101968367A CN 2010101490669 A CN2010101490669 A CN 2010101490669A CN 201010149066 A CN201010149066 A CN 201010149066A CN 101968367 A CN101968367 A CN 101968367A
- Authority
- CN
- China
- Prior art keywords
- interface
- shaft angle
- circuit
- carries
- bus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Abstract
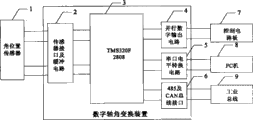
The invention provides a multifunctional networking digital shaft angle converter and a converting method thereof. A PC (Personal Computer) machine is connected with a TMS320F2808 digital controller through a serial level converting circuit, and initial hardware and software setting is completed by upper computer software; and after the initial setting is completed and the hardware is connected, an angle position sensor and the TMS320F2808 digital controller transmit information through a sensor interface and a buffer circuit, a shaft angle conversion operation is completed in the TMS320F2808 digital controller, a result obtained through the operation is transmitted to a control circuit board through a parallel data output circuit or an industrial bus through a 485 and CAN bus interface as an industrial control network node. The invention can simplify the structure and lower the cost, has general function, can realize various shaft angle sensor interfaces, achieve interface and switching of an inductosyn, a rotary transformer and a photoelectric code disk through function selection software and realize the interface based on a common industrial site bus, and has the characteristic of multifunctional networking.
Description
Technical field
The present invention relates to sensor and handle and detection technique, particularly based on the rotary encoder of digital processing unit realization and the digital transformation technology of sine and cosine encoder.
Background technology
In Industry Control and in detecting, the position, angle is a very important parameter, often adopts inductosyn, rotary transformer, selsyn and photoelectric code disk etc. as the angle sensor element, forms angle measuring system in conjunction with resolver-to-angle converter.
The core of resolver-to-angle converter is how the angle sensor signal to be handled, with the information translation of the sensor digital quantity value for ease of computing machine and other system handles.In angle measuring system, mostly adopted the mode of mimic channel and digital circuit combination to realize the design of resolver-to-angle converter in the past.As adopt special chip in conjunction with external analog circuitry, and the AD2S8X of AD company for example, the RDC-19220 series of DDC company, they convert two-way quadrature induced signal to the digital angle value.Adopting the advantage of the mode of mimic channel and digital circuit combination is to reach the high resolving power requirement, shortcoming is that peripheral cell is more, it costs an arm and a leg to use complexity, if the analog device configuration has greatly limited its range of application not to angle measurement circuit cisco unity malfunction.
At present, the industry spot intelligent requirements is integrated into network function in the sensor, make sensor can unit relatively independent as and that have certain intelligence transmit detection information by network and receive the control information of host computer, become networked smart sensor.Because the complicacy of tested object and the real-time requirement of application scenario, the system requirements resolver-to-angle converter has stronger information processing and transmittability.
In order to satisfy the networking of shaft angle variator, intelligentized requirement, solve the mode application limitations of mimic channel and digital circuit combination, adopt high-performance processor TMS320F2808 to realize having the digital shaft angle converting means that circuit is simple, function can conveniently be selected with multimeshed network interface capability.
Through existing technical literature retrieval is found, one piece of identical with theme of the present invention or similar bibliographical information is arranged in the CNKI database, " design studies of permanent-magnet brushless DC electric machine direct Torque Control " (Hunan University's Master's thesis by name, deliver a day 2009.3.2), this article adopts special chip in conjunction with the external analog circuitry mode, and is different with multi-network numeral resolver-to-angle converter mode.
Summary of the invention
The object of the present invention is to provide a kind of can the simplification device structure, reduce cost; Can realize interface, possess the multi-network numeral resolver-to-angle converter of multi-network based on industrial field bus commonly used.The present invention also aims to provide a kind of multi-network numeral shaft angle transform method.
The object of the present invention is achieved like this:
Multi-network numeral shaft angle converting means is formed and is mainly comprised sensor interface buffer circuit 2, TMS320F2808 digitial controller 3 and string and type data-interface; String and type data-interface further comprise parallel data output circuit 4, serial ports level shifting circuit 5 and 485 and CAN bus interface 6; PC 8 is connected with TMS320F2808 digitial controller 3 by serial ports level shifting circuit 5, finishes initial hardware and software set by host computer 8 softwares, comprises setting shaft angle conversion regime and hardware connection setting; Finish initial fixed and connect after the hardware, angular position pick up 1 and TMS320F2808 digitial controller 3 are by sensor interface and buffer circuit 2 transmission information, and in TMS320F2808 digitial controller 3, finish the shaft angle translation operation, the result that computing obtains passes to control circuit board 7 by parallel data output circuit 4, or by 485 and CAN bus interface 6 be delivered on the industrial bus 9 as the industrial control network node, also can read by upper PC 8 watchdog routines by serial ports level shifting circuit 5.
Multi-network numeral shaft angle transform method is: upper PC 8 carries out hardware connection selector switch 23 and finishes hardware connection selection, and the shaft angle conversion regime that carries out simultaneously in the cpu central processing unit 16 is selected; The PWM generation module 15 generation high-frequency pulse signals that carried by TMS320F2808 involve buffer circuit 22 generation high_frequency sine wave signals after filtration, the high_frequency sine wave signal is input in the rotary transformer 10 and makes rotary transformer 10 start working as excitation signal, sine and cosine encoder or rotary transformer 10 output two-way quadrature voltage signals are by differential receiver 11 introducing devices, handle formation bigness scale pulse through comparer 12 and carry out integration to the QEP module 13 that TMS320F2808 carries, the result of integration gives the CPU module 16 of TMS320F2808; Simulating signal is sampled through the ADC module 14 of TMS320F2808 leukorrhea and is kept and conversion process forms digital voltage signal and gives CPU module 16, CPU module 16 is carried out the computing of shaft angle mapping algorithm, obtain real-time position, angle and angular velocity information, transmit information to the outside by the multichannel interface; CPU module 16 is finished logical external control circuit board type circuit connection by the I/O module 17 that carries in the parallel data grabbing card mode or by the SPI module 18 that carries, and CPU module 16 is exported transformation result in the universal serial port mode to the monitoring software of upper PC 8 by the universal asynchronous serial interface A19 that carries; For the bus type interface requirements, upper PC 8 is arranged by the software setting network address earlier, then by the universal asynchronous serial interface B20 of leukorrhea or the CAN communication interface 21 that carries through 485 and CAN interface level change-over circuit 6 finish the electric level interface conversion, the result who obtains is put into industrial bus 9, is read by main website.
The invention provides cover digital shaft angle converting means and a method, replace analog-and digital-hybrid plan, can the simplification device structure, reduce cost; This shaft angle converting means has general utility functions, can realize multiple angular transducer interface, can realize the interface and the conversion of inductosyn, rotary transformer and photoelectric code disk by function selecting software; Have the intelligent network processing capacity, can realize interface, possess the characteristics of multi-network based on industrial field bus commonly used.
Principal feature of the present invention is embodied in:
1, the TMS320F2808 chip has characteristics such as handling property is better, the peripheral hardware integrated level is higher, program storage is bigger, the A/D slewing rate is faster aspect the Digital Control of motor, is that digital information is handled desirable upgrading products and had low cost, low-power consumption, high performance characteristics.
2, it is same easy to connect that hardware connects specifications and models, and it is selective to leave multiple functional interface, for the different coding device can shared same type connector.
3, have the intelligent network processing capacity, can realize interface, possess the characteristics of multi-network based on industrial field bus commonly used.
4, can carry out function selecting by PC, need not to revise on the hardware, finish reconfiguring of multi-functional,, and then select outside multiplex circuit how to connect by I/O mouth control analog multichannel switch.
5, can be used as the industrial network node, the address is set, constitute networking node based on MODBUS or CAN bus by PC.
6, can the upgrade software of TMS320F2808 chip increases the function of device, or carries out the software function revision as required.
Description of drawings
Fig. 1 is a multi-network numeral shaft angle converting means composition diagram;
Fig. 2 is multi-network numeral shaft angle converting means operation logic figure;
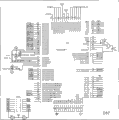
Fig. 3 is the TMS320F2808 minimum system circuit diagram of multi-network numeral shaft angle converting means;
Fig. 4 is the circuit diagram of the shaft angle conversion fraction of multi-network numeral shaft angle converting means;
Fig. 5 is the circuit diagram of the extraneous communication interface of multi-network numeral shaft angle converting means.
Embodiment
For example the present invention is done description in more detail below in conjunction with accompanying drawing:
In conjunction with Fig. 1, comprise of the present invention the composition: the 1-angular position pick up for multi-network numeral shaft angle converting means; 2-sensor interface buffer circuit; The 3-TMS320F2808 digitial controller; 4-Parallel Digital output circuit; 5-serial line interface level shifting circuit; 6-485 and CAN interface level change-over circuit; 7-external control circuit plate; The upper PC of 8-; The 9-industrial bus.
Fig. 2 is a multi-network numeral shaft angle converting means operation logic, wherein: sensors such as 10-sine and cosine encoder or rotary transformer; The 11-differential receiver; The 12-comparer; The QEP module that 13-TMS320F2808 carries; The ADC module that 14-TMS320F2808 carries; Module takes place in the PWM that 15-TMS320F2808 carries; The CPU module of 16-TMS320F2808; The I/O module of 17-TMS320F2808 leukorrhea; The SPI interface that 18-TMS320F2808 carries; The universal asynchronous serial interface A that 19-TMS320F2808 carries; The universal asynchronous serial interface B that 20-TMS320F2808 carries; The CAN communication interface that 21-TMS320F2808 carries; 22-filtering and buffer circuit; 23-hardware connects selector switch.
In conjunction with Fig. 1, multi-network numeral shaft angle converting means composition diagram mainly is made up of sensor interface buffer circuit 2, TMS320F2808 digitial controller 3 and string and type data-interface.String and type data-interface again by parallel data output circuit 4, serial ports level shifting circuit 5 and 485 and CAN bus interface 6 form.PC 8 is connected with TMS320F2808 digitial controller 3 by serial ports level shifting circuit 5, finishes initial hardware and software set by host computer 8 softwares, comprises settings such as setting shaft angle conversion regime and hardware connection.Finish initial fixed and connect after the hardware, angular position pick up 1 and TMS320F2808 digitial controller 3 are by sensor interface and buffer circuit 2 transmission information, and in TMS320F2808 digitial controller 3, finish the shaft angle translation operation, the result that computing obtains can pass to control circuit board 7 by parallel data output circuit 4, or by 485 and CAN bus interface 6 be delivered on the industrial bus 9 as the industrial control network node, also can read by upper PC 8 watchdog routines by serial ports level shifting circuit 5.
In conjunction with Fig. 2, upper PC 8 carries out hardware connection selector switch 23 and finishes hardware connection selection, and the shaft angle conversion regime that carries out simultaneously in the cpu central processing unit 16 is selected.PWM generation module 15 generation high-frequency pulse signals by the TMS320F2808 leukorrhea involve buffer circuit 22 generation high_frequency sine wave signals after filtration, the high_frequency sine wave signal is input in the rotary transformer 10 and makes rotary transformer 10 start working as excitation signal, sine and cosine encoder or rotary transformer 10 output two-way quadrature voltage signals are by differential receiver 11 introducing devices, handle formation bigness scale pulse through comparer 12 and carry out integration to the QEP module 13 that TMS320F2808 carries, the result of integration gives the CPU module 16 of TMS320F2808.The ADC module 14 that simulating signal carries through TMS320F2808 is sampled and is kept and conversion process forms digital voltage signal and gives CPU module 16, CPU module 16 is carried out the computing of shaft angle mapping algorithm, obtain real-time position, angle and angular velocity information, transmit information to the outside by the multichannel interface.CPU module 16 is finished logical external control circuit board type circuit connection by the I/O module 17 that carries in the parallel data grabbing card mode or by the SPI module 18 that carries, and CPU module 16 is exported transformation result in the universal serial port mode to the monitoring software of upper PC 8 by the universal asynchronous serial interface A19 that carries.For the bus type interface requirements, upper PC 8 is arranged by the software setting network address earlier, then by the universal asynchronous serial interface B20 that carries or the CAN communication interface 21 that carries through 485 and CAN interface level change-over circuit 6 finish the electric level interface conversion, the result who obtains is put into industrial bus 9, is read by main website.
In conjunction with Fig. 3, minimum system plate hardware circuit mainly is included as power interface circuit, clock circuit, reset circuit, outer interrupt circuit, the jtag interface circuit of TMS320F2808.In the power interface circuit design, needing to install one on the power pin provides the high capacity charge storage for high capacity electrolytic condenser (being 10 μ F) for total system herein, should suppress high frequency noise at the ceramic pass capacitor that several 0.1 μ F are installed from the near as far as possible place of MCU power pin simultaneously; In the clock circuit design, the present invention adopts the external clock mode, forms self-oscillation at EXTAL, the external 12MHz quartz crystal oscillator of XTAL pin and electric capacity; Reset circuit is similar with interruption outward, arrives respective pin with realization hand-reset or outer the interruption by increasing the pulse signal of pushbutton switch generation to ground; The jtag interface element circuit i.e. the plug of one 14 pin, and the background debug device is used to peg graft.
In conjunction with Fig. 4, the shaft angle conversion fraction is mainly finished the excitation signal generation and is revolved the varying signal processing capacity, if sensor is a sine and cosine encoder, does not then need the excitation part, can not connect the excitation port.Revolve and become the excitation signal ability operate as normal that needs about 10KHz, the generation of excitation signal adds buffering by pwm signal filtering and realizes, at first unite and produce the bipolarity pwm signal by PWM generator PWM1 and PWM2, pwm signal is through active power filtering and buffer circuit, be reduced into the high_frequency sine wave signal, the high_frequency sine wave signal is input to rotary transformer as excitation signal by terminal.The simulating signal that rotary transformer produces is a bipolar signal, can not directly be handled by DSP, transforms and handle being mapped to DSP and can handling the unipolarity level signal through over level, is input to ADC module pin ADCINA0 and ADCINB0 respectively.
In conjunction with Fig. 5, data communication units adopts the MAX485 chip to bring in the design data communication unit as RS-485 drive end and RS-485 reception.Build-out resistor is chosen as 120 ohm.U1 is as the RS-485 drive end, its RE, and DE connects high level.U2 is as the RS-485 receiving end, its RE, DE ground connection.The TMS320F2808 chip is furnished with serial communication interface SCI module.SCI receiver and transmitter are double bufferings, baud rate mask register by one 16, the transmission speed of data can be programmed to 65535 kinds of different modes, this circuit has adopted the chip for driving MAX232 that meets rs-232 standard to carry out serial communication, realizes the asynchronous communication between PC and the multi-network numeral shaft angle converting means.Adopt the TMS320F2808 processor to realize the node of CAN bus, need between CAN bus and processor, increase converter circuit, so that can realize compatible level conversion, native system adopts the SN65HVD230 converter (meeting ISO11898) of TI company to realize the high-speed CAN bus network.SN65HVD230 is the CAN transceiver of 3.3V, is applicable to the serial communication of the CAN bus of higher communication speed, good resistance interference performance and high reliability.It has difference transmitting-receiving ability, and flank speed can reach 1Mb/s; The low current standby mode, exemplary currents 370 μ A.It has at a high speed, 3 kinds of different mode of operations of slope and wait, its mode of operation can be controlled pin by Rs and select, in order to reduce the electromagnetic interference (EMI) that causes because of the level fast rise,, be chosen as the slope control model with the resistance eutral grounding of Rs by a 10k Ω.
Claims (2)
1. a multi-network numeral shaft angle converting means is characterized in that: form and mainly comprise sensor interface buffer circuit (2), TMS320F2808 digitial controller (3) and string and type data-interface; String and type data-interface further comprise parallel data output circuit (4), serial ports level shifting circuit (5) and 485 and CAN bus interface (6); PC (8) is connected with TMS320F2808 digitial controller (3) by serial ports level shifting circuit (5), finishes initial hardware and software set by host computer (8) software, comprises setting shaft angle conversion regime and hardware connection setting; Finish initial fixed and connect after the hardware, angular position pick up (1) and TMS320F2808 digitial controller (3) are by sensor interface and buffer circuit (2) transmission information, and in TMS320F2808 digitial controller (3), finish the shaft angle translation operation, the result that computing obtains by parallel data output circuit (4) pass to control circuit board (7) or by 485 and CAN bus interface (6) be delivered to as the industrial control network node that industrial bus (9) is gone up or read by upper PC (8) watchdog routine by serial ports level shifting circuit (5).
2. multi-network numeral shaft angle transform method is characterized in that: upper PC (8) carries out hardware and connects selector switch (23) and finish hardware and connect and select, and the shaft angle conversion regime that carries out simultaneously in the cpu central processing unit (16) is selected; PWM generation module (15) the generation high-frequency pulse signal that is carried by TMS320F2808 involves buffer circuit (22) generation high_frequency sine wave signal after filtration, the high_frequency sine wave signal is input in the rotary transformer (10) and makes rotary transformer (10) start working as excitation signal, sine and cosine encoder or rotary transformer (10) output two-way quadrature voltage signal is introduced multi-network numeral shaft angle converting means by differential receiver (11), handle formation bigness scale pulse through comparer (12) and carry out integration to the QEP module (13) that TMS320F2808 carries, the result of integration gives the CPU module (16) of TMS320F2808; The ADC module (14) that simulating signal carries through TMS320F2808 is sampled and is kept and conversion process forms digital voltage signal and gives CPU module (16), CPU module (16) is carried out the computing of shaft angle mapping algorithm, obtain real-time position, angle and angular velocity information, transmit information to the outside by the multichannel interface; CPU module (16) is finished logical external control circuit board type circuit connection by the I/O module (17) that carries in the parallel data grabbing card mode or by the SPI module (18) that carries, and CPU module (16) is exported transformation result in the universal serial port mode to the monitoring software of upper PC (8) by the universal asynchronous serial interface A19 that carries; For the bus type interface requirements, upper PC (8) is arranged by the software setting network address earlier, then by the universal asynchronous serial interface B20 that carries or the CAN communication interface (21) that carries through 485 and CAN interface level change-over circuit (6) finish the electric level interface conversion, the result who obtains is put into industrial bus (9), is read by main website.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010101490669A CN101968367A (en) | 2010-04-19 | 2010-04-19 | Multifunctional networking digital shaft angle converter and converting method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010101490669A CN101968367A (en) | 2010-04-19 | 2010-04-19 | Multifunctional networking digital shaft angle converter and converting method thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101968367A true CN101968367A (en) | 2011-02-09 |
Family
ID=43547555
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010101490669A Pending CN101968367A (en) | 2010-04-19 | 2010-04-19 | Multifunctional networking digital shaft angle converter and converting method thereof |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101968367A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102629845A (en) * | 2012-03-30 | 2012-08-08 | 清华大学 | Position detection circuit of three-phase motor rotor based on rotary transformer |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006073378A1 (en) * | 2005-01-07 | 2006-07-13 | Ronald De Four | A self starting method and an apparatus for sensorless commutation of brushless dc motors |
| CN1825054A (en) * | 2006-02-20 | 2006-08-30 | 连云港杰瑞电子有限公司 | Double speed angle-digital converter |
| KR20070014347A (en) * | 2005-07-28 | 2007-02-01 | 삼성중공업 주식회사 | Symmetric pwm motor driving current sync. apparatus using dsp/fpga |
| CN101319915A (en) * | 2008-06-25 | 2008-12-10 | 连云港杰瑞电子有限公司 | Signal-number conversion method of rotating transformer |
| CN101398313A (en) * | 2007-09-25 | 2009-04-01 | 奇瑞汽车股份有限公司 | Motor rotor position sensor and method for measuring position of motor rotor |
-
2010
- 2010-04-19 CN CN2010101490669A patent/CN101968367A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006073378A1 (en) * | 2005-01-07 | 2006-07-13 | Ronald De Four | A self starting method and an apparatus for sensorless commutation of brushless dc motors |
| KR20070014347A (en) * | 2005-07-28 | 2007-02-01 | 삼성중공업 주식회사 | Symmetric pwm motor driving current sync. apparatus using dsp/fpga |
| CN1825054A (en) * | 2006-02-20 | 2006-08-30 | 连云港杰瑞电子有限公司 | Double speed angle-digital converter |
| CN101398313A (en) * | 2007-09-25 | 2009-04-01 | 奇瑞汽车股份有限公司 | Motor rotor position sensor and method for measuring position of motor rotor |
| CN101319915A (en) * | 2008-06-25 | 2008-12-10 | 连云港杰瑞电子有限公司 | Signal-number conversion method of rotating transformer |
Non-Patent Citations (3)
| Title |
|---|
| 《中国优秀硕士学位论文全文数据库-工程科技Ⅱ辑》 20100115 丁祥 永磁无刷直流电机直接转矩控制系统的设计研究 C042-26 , 第1期 2 * |
| 《微电机》 20091231 徐大林等 一种高精度全数字跟踪型轴角-数字转换系统 32-35页 第42卷, 第1期 2 * |
| 《控制工程》 20100131 杜春洋等 基于DSP的快速轴角变换方法 35-37 第17卷, 第1期 2 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102629845A (en) * | 2012-03-30 | 2012-08-08 | 清华大学 | Position detection circuit of three-phase motor rotor based on rotary transformer |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201174041Y (en) | Full-digital general AC servo positioning control driver | |
| CN203422097U (en) | Multifunctional networking digital shaft angle converter | |
| CN105809882A (en) | Data collecting and alarming device of wireless anti-collision pier monitoring and alarming system | |
| CN102346453A (en) | Analog data collection module based on industrial Ethernet | |
| CN101968367A (en) | Multifunctional networking digital shaft angle converter and converting method thereof | |
| CN203217563U (en) | CAN (controller area network) bus control and transmit-receive system with high isolation performance | |
| CN207020660U (en) | A kind of system communication module | |
| CN103675440A (en) | Power efficiency monitoring terminal and monitoring method thereof | |
| CN203241752U (en) | Digital analog conversion CAN bus control transmit-receive system connected with multipath-sensor | |
| CN202177816U (en) | Analogue value data acquisition module based on industrial Ethernet | |
| CN202304874U (en) | Thermotechnical type energy efficiency data acquisition terminal | |
| CN213399437U (en) | High-integration embedded multi-sensor signal acquisition and processing device | |
| CN201698572U (en) | Bluetooth wireless measuring system for engineering machinery | |
| CN211927076U (en) | Vibration signal detection and acquisition integrated sensor | |
| CN203811144U (en) | Angle measuring device based on incremental photoelectric encoder | |
| CN203554495U (en) | Network-type RF wireless intelligent gas meter management gateway | |
| CN202693677U (en) | Three-phase electronic electric energy meter | |
| CN203101899U (en) | Power detection device for electric vehicle | |
| CN201184970Y (en) | Embedded board for acquiring data of watercraft engine compartment | |
| CN202661546U (en) | Electric energy data acquisition device based on double central processing units (CPU) | |
| CN203204612U (en) | CAN bus control receiving and sending system with two power consumption modes | |
| CN203537567U (en) | Picking robot sensor wireless transmission device based on ZigBee technology | |
| CN202339489U (en) | Device for improving finished product flow metering authenticity of mixed explosive charging vehicle | |
| CN204290706U (en) | The power supply that a kind of RS232 signal drives | |
| CN202929102U (en) | Multifunctional meter based on Zigbee communication |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Open date: 20110209 |