BR112016015181B1 - Sistema, método para calibrar a saída acústica de campo distante de um vibrador marinho e vibrador marinho - Google Patents
Sistema, método para calibrar a saída acústica de campo distante de um vibrador marinho e vibrador marinho Download PDFInfo
- Publication number
- BR112016015181B1 BR112016015181B1 BR112016015181-0A BR112016015181A BR112016015181B1 BR 112016015181 B1 BR112016015181 B1 BR 112016015181B1 BR 112016015181 A BR112016015181 A BR 112016015181A BR 112016015181 B1 BR112016015181 B1 BR 112016015181B1
- Authority
- BR
- Brazil
- Prior art keywords
- marine vibrator
- sensor
- vibrator
- signal
- acoustic output
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/02—Generating seismic energy
- G01V1/143—Generating seismic energy using mechanical driving means, e.g. motor driven shaft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/38—Seismology; Seismic or acoustic prospecting or detecting specially adapted for water-covered areas
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/38—Seismology; Seismic or acoustic prospecting or detecting specially adapted for water-covered areas
- G01V1/3861—Seismology; Seismic or acoustic prospecting or detecting specially adapted for water-covered areas control of source arrays, e.g. for far field control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/003—Seismic data acquisition in general, e.g. survey design
- G01V1/005—Seismic data acquisition in general, e.g. survey design with exploration systems emitting special signals, e.g. frequency swept signals, pulse sequences or slip sweep arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/02—Generating seismic energy
- G01V1/04—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/02—Generating seismic energy
- G01V1/143—Generating seismic energy using mechanical driving means, e.g. motor driven shaft
- G01V1/145—Generating seismic energy using mechanical driving means, e.g. motor driven shaft by deforming or displacing surfaces, e.g. by mechanically driven vibroseis™
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/02—Generating seismic energy
- G01V1/159—Generating seismic energy using piezoelectric or magnetostrictive driving means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V13/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices covered by groups G01V1/00 – G01V11/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V2210/00—Details of seismic processing or analysis
- G01V2210/10—Aspects of acoustic signal generation or detection
- G01V2210/12—Signal generation
- G01V2210/121—Active source
- G01V2210/1214—Continuous
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Geophysics (AREA)
- General Physics & Mathematics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Acoustics & Sound (AREA)
- Environmental & Geological Engineering (AREA)
- Geology (AREA)
- Oceanography (AREA)
- Manufacturing & Machinery (AREA)
- Geophysics And Detection Of Objects (AREA)
- Selective Calling Equipment (AREA)
- Feedback Control In General (AREA)
Abstract
método para calibrar a saída acústica de campo distante de um vibrador marinho. técnicas são reveladas relacionadas ao controle de fontes sísmicas, tais como vibradores marinhos. de acordo com algumas concretizações, sistemas de controle de aprendizagem iterativo (ilc) podem ser usados para controlar tais fontes sísmicas. de acordo com algumas concretizações, sensor(es) local(is) colocado(s) dentro, no, ou próximo de uma fonte sísmica e/ou sensores remotos colocados na região de campo distante, podem ser usados para determinar uma função de transferência para a fonte sísmica para tal controle de ilc.
Description
[001] Este pedido reivindica prioridade ao Pedido Provisório dos Estados Unidos N°. 61/921.962, depositado em 30 de dezembro de 2013, que é incorporado por referência aqui em sua totalidade. Este pedido é também relacionado à Patente dos Estados Unidos N°. 7.974.152, que é incorporada por referência aqui em sua totalidade. ANTECEDENTES
[002] Esta revelação se relaciona geralmente ao campo de levantamento sísmico, por exemplo, levantamento geofísico marinho, e, mais especificamente, a sistemas e métodos para desempenho aperfeiçoado de vibradores marinhos, e/ou para capacitar operações sísmicas em áreas onde uso de canhões pneumáticos e vibradores convencionais com ruído de alta frequência, não podem ser ambientalmente aceitáveis.
[003] Fontes sísmicas, incluindo vibradores, são usadas na exploração geofísica em terra e em áreas cobertas com água na terra. Os sinais gerados por estas fontes se deslocam descendentemente nas subsuperfícies, e são refletidos de interfaces de reflexão na subsuperfície. A energia refletida é detectada por detectores de sinal, tipicamente, hidrofones ou geofones, em ou próximos à superfície da terra, ou próximos à superfície da água em áreas de exploração cobertas por água.
[004] Muitas das fontes acústicas presentemente usadas nas operações de aquisição sísmica marinha são do tipo impulsiva, em que maior quantidade de energia possível é gerada durante menor extensão de tempo possível. Exemplos de tais fontes de impulso incluem canhões pneumáticos e pistolas de água. O teor de frequência de tais fontes é tipicamente controlável somente a um pequeno grau, e fontes individuais diferentes são selecionadas e operadas juntas em uma série para a geração de faixas de frequência diferentes de energia sísmica para necessidades diferentes de levantamento sísmico.
[005] Fontes acústicas vibratórias, incluindo fontes hidraulicamente energizadas e fontes empregando material piezoelétrico ou magnetostritivo, foram usadas em operações marinhas. Contudo, tais fontes têm encontrado somente uso limitado. Embora tais fontes possam gerar sinais sobre várias faixas de frequência, comumente referidas como "varreduras de frequência", a energia limitada que tais fontes conhecidas na técnica foram capazes de gerar tem limitado seu uso em operações marinhas.
[006] É bem conhecido que à medida que as ondas sonoras se deslocam através da água e através de estruturas geológicas de subsuperfície, as ondas sonoras de frequência mais alta são tipicamente atenuadas mais rapidamente do que as ondas sonoras de frequência mais baixa, e, consequentemente, as ondas sonoras de frequência mais baixa podem ser transmitidas sobre distâncias mais longas através da água e estruturas geológicas do que ondas sonoras de frequência mais alta. Existe há muito tempo uma necessidade no setor sísmico da indústria de óleo e gás para fontes de energia sísmica marinha tipo vibrador de baixa frequência.
[007] É também importante que o teor de espectro da energia sísmica gerada por um vibrador seja bem conhecido ou caracterizado de modo a capacitar interpretar corretamente a energia sísmica refletida a partir da subsuperfície. Os métodos de controle usados para operação de vibradores em terra de alta energia não são necessariamente adaptáveis para uso no controle de vibradores marinhos. Existe também uma necessidade de um método de controle para um vibrador marinho para assegurar teor de espectro de energia bem caracterizado.
[008] A Figura 1 é um diagrama ilustrando uma concretização de um sistema de levantamento geofísico.
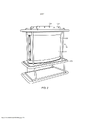
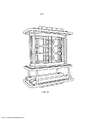
[009] A Figura 2 ilustra uma vista isométrica de um exemplo de um vibrador marinho de acordo com uma concretização.
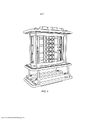
[0010] A Figura 3 ilustra o vibrador marinho da Figura 2 em corte transversal parcial de acordo com uma concretização.
[0011] A Figura 4 ilustra um acionador eletrodinâmico do vibrador marinho da Figura 2 de acordo com uma concretização.
[0012] A Figura 5 ilustra o acionador eletrodinâmico da Figura 4 em combinação com elementos de mola de acordo com uma concretização.
[0013] A Figura 6 ilustra os acionadores eletrodinâmicos da Figura 4 em combinação com os elementos de mola de acordo com outra concretização.
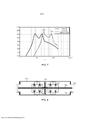
[0014] A Figura 7 ilustra um exemplo de um espectro de amplitude com duas ressonâncias e duas fontes de acordo com uma concretização.
[0015] A Figura 8 ilustra um corte transversal de um vibrador marinho do tipo pistão de exemplo que inclui dois atuadores para operação de um sistema de controle de acordo com uma concretização.
[0016] A Figura 9 ilustra uma concretização de exemplo do vibrador marinho do tipo pistão da Figura 8.
[0017] A Figura 10 ilustra um corte transversal de um exemplo de um vibrador tipo flextensional que tem dois atuadores para operação de um sistema de controle de acordo com uma concretização.
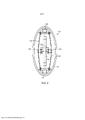
[0018] As Figuras 11A-11B ilustram o vibrador tipo flextensional da Figura 10 de acordo com uma concretização.
[0019] A Figura 12 ilustra uma vista em corte transversal de um exemplo de um vibrador marinho com exemplos de localizações de sensor de acordo com uma concretização.
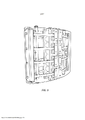
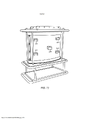
[0020] A Figura 13 ilustra um vibrador marinho de exemplo que inclui um invólucro flextensional com quatro sensores de medição de movimento no plano do invólucro de acordo com uma concretização.
[0021] A Figura 14 ilustra um exemplo de um sistema de controle para acionamento de um atuador de acordo com uma concretização.
[0022] A Figura 15 ilustra um exemplo de um sistema de controle para um atuador operando em um domínio de frequência de acordo com uma concretização.
[0023] A Figura 16 ilustra um exemplo de um sistema de controle em que dois acionadores são operados por dois sistemas de controle de aprendizagem iterativos (ILC) de acordo com uma concretização.
[0024] A Figura 17 ilustra um exemplo de um sistema de controle de dois canais configurados para manipular o acoplamento cruzado mecânico entre os atuadores de acordo com uma concretização.
[0025] A Figura 18 ilustra um gráfico de resposta de transdutor em frequências de acionamento diferentes de acordo com uma concretização.
[0026] A Figura 19 ilustra um gráfico de resposta de transdutor em desvios de fase diferentes de acordo com uma concretização.
[0027] A Figura 20 é um diagrama ilustrando uma concretização de um sistema de levantamento geofísico.
[0028] A Figura 21 é um fluxograma de um método para controle de um vibrador marinho, via atuadores múltiplos usando ILC de acordo com uma concretização.
[0029] A Figura 22 é um fluxograma de um método para calibrar um vibrador marinho usando ILC na presença de canhões pneumáticos ou outras fontes impulsivas, de acordo com uma concretização.
[0030] A Figura 23 é um fluxograma de um método para calibrar um vibrador marinho usando ILC baseado em uma função de transferência entre medições de distância perto do campo e do campo, de acordo com uma concretização.
[0031] A Figura 24 é um fluxograma de um método para operação de um vibrador marinho em conjunto com fontes de sinal impulsivo usando ILC, de acordo com uma concretização.
[0032] Este relatório descritivo inclui referências a "uma concretização" ou "concretização". Os aparecimentos das frases "em uma concretização" ou "em uma concretização" não se refere necessariamente à mesma concretização. Características particulares, estruturas, ou características podem ser combinadas em qualquer maneira adequada consistente com esta revelação.
[0033] Vários dispositivos, unidades, circuitos, ou outros componentes, podem ser descritos ou reivindicados como "configurados para", "utilizáveis para", ou "operáveis para", realizam uma tarefa ou tarefas. Em tais contextos, "configurados para", "utilizáveis para", e "operáveis para", são cada usados para conotar estrutura por indicação que os dispositivos/unidades/circuitos/componentes, incluem estrutura que realizam a tarefa ou tarefas durante operação. Como tal, o dispositivo/unidade/circuito/componente, podem ser referidos para serem configurados para, utilizáveis para, ou utilizáveis para realizar a tarefa mesmo quando o dispositivo/unidade/circuito/componente especificados não é atualmente operacional (por exemplo, não está em ou em operação). Os dispositivos/unidades/circuitos/componentes usados com o "configurados para", "utilizáveis para", ou "operáveis para", linguagem pode incluir hardware eletrônico — por exemplo, circuitos, instruções de armazenagem de memória executáveis para implementar a operação, etc., — dispositivos mecânicos, ou outros tipos de estrutura. Recitando que um dispositivo/unidade/circuito/componente é "configurado para", "utilizável para", e "operável para", realizam uma ou mais tarefas, é expressamente pretendido não invocar a 35 U.S.C. § 112(f), para aquele dispositivo/unidade/circuito/componente.
[0034] Em algumas concretizações, vários itens de informação relacionados a levantamentos sísmico podem ser concretizados em um produto de dado geofísico. Um "produto de dado geofísico" pode ser armazenado em um meio não transitório legível por computador, e pode concretizar dados geofísicos (tais como dados de serpentina brutos, dados de serpentina processados, mapas de duas ou três dimensões baseados em dados de serpentina, etc.). Alguns exemplos não limitantes de meio legível por computador podem incluir discos rígidos, CDs, DVDs, impressos, etc. Em algumas concretizações, dados análogos brutos de serpentinas podem ser armazenados como um produto de dado geofísico. Em outros exemplos, os dados podem primeiro ser digitalizados e/ou condicionados antes de serem armazenados como o produto de dado geofísico. Em ainda outros exemplos, os dados podem ser totalmente processados em um mapa bi- ou tridimensional das várias estruturas geofísicas antes de serem armazenados no produto de dado geofísico. O produto de dado geofísico pode ser produzido offshore (por exemplo, pelo equipamento em uma embarcação), ou onshore (por exemplo, em uma facilidade em terra), ou dentro dos Estados Unidos, ou em outro país. Se o produto de dado geofísico é produzido offshore, ou em outro país, ele pode ser importado onshore para uma facilidade nos Estados Unidos. Uma vez onshore nos Estados Unidos, a análise geofísica pode ser realizada no produto de dado geofísico.
[0035] Vibrador marinho - Um vibrador marinho pode ser geralmente descrito como um transdutor eletromecânico utilizável para gerar energia acústica, por exemplo, energia sísmica, na água. Algumas concretizações de vibradores marinhos podem conter um ou mais de (entre outras coisas), um invólucro do vibrador, atuadores, um sistema mecânico conectando os atuadores com o invólucro do vibrador, e um ou mais sensores locais associados com o vibrador. Algumas concretizações podem utilizar uma placa de pistão para transmitir vibrações na água.
[0036] Atuador - Um atuador pode ser geralmente descrito como um dispositivo utilizável para converter um sinal de entrada elétrico em uma força mecânica e/ou deslocamento, mudança na velocidade, etc. Os atuadores podem, em algumas concretizações, ser implementados como bobinas de voz, piezoelétricos, magnetoestritivos, impulsivos (por exemplo, explosivos, etc.), e/ou hidráulicos, entre outros. Por exemplo, em algumas concretizações, um assim denominado "projetor de disco de flexão", ou um "dobrador", pode ser usado como uma fonte vibratória, onde um dobrador pode incluir um disco de material elástico, por exemplo, alumínio, e uma cerâmica piezoelétrica (por exemplo, PZT) fixado a este.
[0037] Sensor acústico - Um sensor acústico pode ser geralmente descrito como um sensor operável para medir pressão, velocidade de partícula, aceleração, e/ou deslocamento. Por exemplo, o deslocamento do invólucro pode ser medido com métodos capacitivos de baixo custo, e/ou tensão/estresse que pode estar correlacionado com a pressão de campo distante gerada pelo vibrador.
[0038] Sensor local no vibrador ou simplesmente sensor local - Estes termos geralmente se referem a sensores acústicos montados no interior de, no, ou perto de, isto é, próximo a, o vibrador. Por exemplo, um sensor local pode estar localizado a uma distância que é pequena relativa ao tamanho do vibrador.
[0039] Sensor acústico remoto - um sensor acústico remoto pode ser geralmente descrito como um sensor operável para medir o sinal acústico emitido a partir do vibrador a uma distância que é maior comparada com o tamanho do transdutor (ou vibrador marinho), também conhecida como um sinal de campo distante. Um sensor acústico remoto pode, em algumas concretizações, ser colocado no campo distante acústico do vibrador.
[0040] Nota-se que os termos "remoto" e "local" podem ter significados específicos (ou limites) para aplicações diferentes. Por exemplo, em algumas concretizações, local pode se referir a posições em, no, ou dentro de um diâmetro do transdutor (ou vibrador marinho). Contudo, em algumas outras concretizações, local pode se referir a posições em, no, ou dentro de vários (por exemplo, 3, 4 ou 5) diâmetros do transdutor (ou vibrador marinho). Inversamente, remoto pode se referir a posições que não são locais, por exemplo, posições fora desta faixa, por exemplo, mais do que um diâmetro do transdutor, ou, em algumas outras concretizações, mais do que 3, 4 ou 5 diâmetros, e assim por diante, conforme desejado. Nota-se que em várias outras concretizações, o limite entre posições remota local e posições remotas pode ter outros valores, por exemplo, 2, 6, 10 diâmetros, e assim por diante, conforme desejado. Em outras palavras, uma aplicação particular pode estabelecer um valor limite para a demarcação local/remota conforme apropriado. Para proposta desta revelação, deve ser compreendido que o termo "no" é definido tal que um sensor que está "no" um aparelho pode, em algumas concretizações, esteja no interior daquele aparelho.
[0041] Algoritmo de Controle de Aprendizagem Iterativo ("ILC") - Um algoritmo de ILC pode ser geralmente descrito como um algoritmo de controle de aprendizagem utilizável para controlar transmissões repetidas de sinais acústicos por produção de ajustes após cada iteração ou série de iterações. Os sinais são medidos durante transmissão, e comparados com sinais de referências. O erro observado pode ser usado para calcular sinais de correção a serem usados para a próxima transmissão. A correção pode ser baseada em um modelo do transdutor.
[0042] Faixa de áudio - A faixa de áudio pode ser geralmente descrita como a faixa de frequência sísmica para qual um vibrador marinho é designado para transmitir muito de sua energia. O limite superior da faixa de áudio pode depender da aplicação sísmica, e pode estar abaixo de 300 Hz em algumas concretizações.
[0043] Faixa de controle - A faixa de controle pode ser geralmente descrita como a faixa de frequência sobre a qual o algoritmo de ILC está operando. A faixa de controle pode tipicamente ser uma ordem de grandeza mais ampla do que a faixa de áudio.
[0044] Sinal sísmico- Um sinal sísmico pode ser geralmente descrito como um sinal com uma certa duração transmitido por um vibrador marinho em ocasiões repetidas. O sinal pode ser um pulso ou parte de um sinal contínuo. Um ou mais sinais sísmicos podem ser usados durante transmissão.
[0045] Iteração - Uma iteração se refere a uma única passagem através de um processo repetitivo. Em algumas concretizações, uma iteração típica pode incluir processos de transmissão de uma sinal acústico, por exemplo, sísmico; registro do sinal transmitido; computação de um sinal de correção a ser usado para a próxima iteração; e atualização de um modelo.
[0046] De acordo com a seguinte descrição, as concretizações da presente revelação são apresentadas.
[0047] A Figura 1 é um diagrama simples ilustrando uma concretização de um exemplo de sistema de aquisição de dados sísmicos marinhos, conforme é tipicamente usado para adquirir dados sísmicos, isto é, um levantamento sísmico marinho. Na concretização de exemplo mostrada, uma embarcação sísmica 14 se move ao longo da superfície do corpo de água 12, tal como um lago ou o oceano. O levantamento sísmico marinho é pretendido para detectar e registrar sinais sísmicos relacionados a estrutura e composição de várias formações de subsuperfície 21 e 23 abaixo do fundo da água 20. A embarcação sísmica 14 inclui atuação da fonte, registro de dados e equipamento de navegação, mostrados geralmente em 16, referido para conveniência como um "sistema de registro". A embarcação sísmica 14, ou uma embarcação diferente (não mostrada), pode rebocar uma ou mais fontes de energia sísmica 18, ou séries de tais fontes in água 12. A(s) fonte(s) de energia sísmica no presente exemplo pode(m) ser vibradores marinhos de uma estrutura, e tendo um sistema de controle, conforme será adicionalmente explanado abaixo. A embarcação sísmica 14, ou uma embarcação diferente, reboca pelo menos uma serpentina sísmica 10 próxima à superfície de água 12. A serpentina 10 é acoplada à embarcação sísmica 14 por cabo condutor 26. Uma pluralidade de matrizes de sensor 24 são dispostas em localizações afastadas ao longo da serpentina 10. As matrizes de sensor 24 podem ser formadas por montagem de um sensor sísmico dentro de cada um de uma pluralidade de espaçadores de sensor, e dispondo os espaçadores de sensor ao longo da serpentina em um arranjo particular. O sensor remoto 27 pode também ser usado, conforme descrito abaixo, em adição a, ou no lugar de matrizes de sensor 24, para calibração de fontes de energia sísmica 18.
[0048] Durante operação, certo equipamento (não mostrado separadamente) no sistema de registro 16 faz com que fontes de energia sísmica 18 atuem em tempos selecionados. Quando atuadas, as fontes de energia sísmica 18 produzem energia sísmica 19 que emanam geralmente externamente das fontes de energia sísmica 18. A energia sísmica 19 se desloca descendentemente, através da água 12, e passa, pelo menos em parte, através do fundo da água 20 nas formações 21 e 23 abaixo. A energia sísmica 19 é pelo menos parcialmente refletida de uma ou mais delimitações de impedância acústica 22 abaixo do fundo da água 20, e se desloca ascendentemente, onde ela pode ser detectada pelos sensores em cada matriz de sensor 24. A estrutura das formações 21 e 23, entre outras propriedades da subsuperfície da Terra, pode ser inferida pelo tempo de deslocamento de energia sísmica 19, e pelas características da energia detectada, tal como sua amplitude e fase.
[0049] A Figura 2 mostra uma implementação de exemplo da fonte de energia sísmica 18, que inclui fonte do vibrador 120 montada no interior da armação 116. Suporte 114 é conectado ao topo da armação 116, e inclui aberturas 124 que podem ser usadas para desdobramento da fonte de energia sísmica 18 no corpo de água (por exemplo, conforme mostrado na Figura 1). O invólucro 102 pode ser usado para transmitir as vibrações de fonte de energia sísmica 18 na água circundante. Análise de Operação de Vibrador Marinho
[0050] A impedância total que será experimentada por um vibrador marinho, em algumas concretizações, pode ser expressa conforme segue: onde Zr é a impedância total, Rr é a impedância de radiação, e Xr é a impedância reativa.
onde Zr é a impedância total, Rr é a impedância de radiação, e Xr é a impedância reativa.
[0051] Em uma análise da transferência de energia de um vibrador marinho, o sistema pode ser aproximado como um pistão desconcertado. Na expressão da impedância total que será experimentada, a impedância de radiação Rr de um a pistão desconcertado é: e a impedância reativa é:
e a impedância reativa é:  onde
onde  e onde
e onde onde po = densidade da água, w = frequência radial, k = número de ondas, a = raio do pistão, c = velocidade do som, / = comprimento de onda, e J1 = Função de Bessel da primeira ordem.
onde po = densidade da água, w = frequência radial, k = número de ondas, a = raio do pistão, c = velocidade do som, / = comprimento de onda, e J1 = Função de Bessel da primeira ordem.
[0052] Usando a expansão de série de Taylor nas equações acima produz-se: (Equação 8)
(Equação 8)
[0053] Nota-se que as baixas frequências quando x=2ka é muito menor do que 1, a parte real e imaginária da expressão de impedância total pode ser aproximada com o primeiro termo da expressão de Taylor. As expressões para baixas frequências quando o comprimento de onda é muito maior do que o raio do pistão torna-se:
[0054] Segue que para baixas frequências R será tipicamente um número pequeno comparado a X, que sugere uma geração de sinal de baixa eficiência. Contudo, por introdução de uma ressonância na extremidade inferior do espectro de frequência, energia acústica de baixa frequência pode ser gerada mais eficientemente. Na ressonância, a parte imaginária (reativa) da impedância é cancelada, e a fonte acústica é capaz de transmitir eficientemente energia acústica na água.
[0055] Em uma concretização, um vibrador marinho pode ser configurado para gerar ou, de outro modo, usar pelo menos duas frequências ressonantes dentro da faixa de frequência sísmica de interesse, tipicamente uma faixa entre 1 Hz e 200 Hz.
[0056] A Figura 3 mostra uma concretização de vibrador marinho 130 em corte transversal parcial, que inclui armação principal 134, barras extremas com mancais deslizantes 132, e acionadores 133, que podem ser acionadores eletrodinâmicos. Conforme mostrado, os acionadores 133 e bobinas 136 e 137 podem ser usados para atuar o vibrador marinho 130. Embora a concretização particular aqui descrita mostre somente um acionador duplo, uma concretização em que mais do que dois acionadores são utilizados em paralelo (ou menos do que dois acionadores), está dentro do escopo desta revelação. A concretização inclui adicionalmente um invólucro flexitensional 131. Em uma implementação particular, o invólucro flexitensional também age como uma mola para a primeira ressonância. Em uma concretização em que o acionador 133 compreende um acionador eletrodinâmico, o acionador compreende adicionalmente um circuito magnético que gerará um campo magnético para a bobina elétrica. Quando corrente elétrica é aplicada à bobina, uma força será gerada onde F=IlB, onde I é a corrente, l é o comprimento do condutor in na bobina, e B é o fluxo magnético na folga de ar no circuito magnético. Por variação da grandeza da corrente elétrica, e, consequentemente, da grandeza da força que age na bobina, o comprimento do curso do acionador variará. Tipicamente, imãs permanentes são utilizados no circuito magnético para gerar o fluxo magnético. Pelo uso deste tipo de acionador, é possível obter longos cursos de várias polegadas, que pode ser útil para ser capaz de gerar saída acústica significante na faixa de frequência 110 Hz.
[0057] Na Figura 3, uma mola interna 135 é mostrada com massas fixadas à mesma. Conforme adicionalmente discutido abaixo, a mola interna 135, com massas fixadas à mesma, pode ser incluída para alcançar uma segunda frequência de ressonância do sistema dentro da faixa de frequência sísmica de interesse. Embora um sistema de vibrador que inclui somente o invólucro flexitensional agindo como uma mola tipicamente revele uma segunda frequência de ressonância, para sistemas tendo um tamanho para uso na exploração geofísica, a segunda frequência de ressonância seria muito mais alta do que as frequências dentro da faixa de frequência sísmica de interesse.
[0058] As Figuras 4-6 mostram vistas em corte parciais adicionais da concretização mostrada na Figura 3. Em particular, a Figura 4 ilustra um acionador eletrodinâmico no interior do vibrador marinho. A Figura 5 ilustra o acionador eletrodinâmico em combinação com elementos de mola de acordo com uma concretização. A Figura 6 ilustra os acionadores eletrodinâmicos em combinação com os elementos de mola de acordo com outra concretização. Conforme um técnico no assunto com o benefício desta revelação apreciará, várias imperfeições nas juntas, mancais, invólucros, eletrônicos, materiais magnéticos, etc., podem causar efeitos não lineares nos vibradores marinhos. Os sistemas de controle e métodos, de acordo com esta revelação, podem ser usados para evitar tais efeitos em alguns casos.
[0059] A Figura 7 mostra um gráfico da resposta de frequência de um vibrador marinho, de acordo com uma concretização. Conforme mostrado, a Figura 7 inclui uma resposta de frequência em ambos energia de RMS e na pressão em dB relativo a 1 μPa. A primeira frequência de ressonância 110 resulta substancialmente da interação do invólucro flexitensional que age como uma mola. A segunda frequência de ressonância 112 resulta substancialmente da interação da mola interna com suas massas adicionadas.
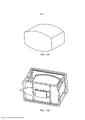
[0060] As Figuras 8 e 9 ilustram um vibrador marinho tipo pistão que pode ser usado de acordo com esta revelação. Na concretização ilustrada, o vibrador marinho inclui um alojamento de contenção 140. As placas de pistão 142 podem ser flexivelmente acopladas ao alojamento de contenção 140, por exemplo, por meio de vedações de borracha 144. As placas de pistão 142 podem cada ter elementos de mola 146 fixados às mesmas. Os elementos de mola 146 podem ser dispostos entre as placas de pistão 142 e uma fixação 148. Um ou mais acionadores 150 (por exemplo, acionadores eletromagnéticos) podem ser acoplados às placas de pistão 142 e fixação 148, para fazer com que as placas de pistão 142 se movam para trás e para frente. Este movimento das placas de pistão 142 leva vantagem da flexibilidade de vedações de borracha 144. Conforme seria compreendido por um técnico no assunto com o benefício desta revelação, as vedações de borracha 144 não necessitam serem produzidas de borracha, mas preferivelmente podem ser produzidas de qualquer material que permite um acoplamento flexível das placas de pistão 142 ao alojamento de contenção 140. A Figura 9 mostra uma vista em perspectiva da concretização da Figura 8.
[0061] As Figuras 10 e 11A-11B ilustram um vibrador marinho tipo flexitensional que pode ser usado de acordo com esta revelação. Conforme mostrado, o invólucro flexitensional 152 tipicamente flexiona durante operação quando o acionador 154 atua. Isto pode ser efetuado via dobradiças 156 e mancais lineares 158 que são fixados à fixação 160. Este tipo de vibrador marinho pode ser comparado ao vibrador tipo pistão das Figuras 8 e 9, onde as placas de pistão 142 tipicamente não encurvam ou flexionam em operação, mas, preferivelmente, podem se mover para trás e para frente agindo contra a água circundante. A Figura 11A mostra uma vista em perspectiva, e a Figura 11B mostra uma vista em corte da concretização da Figura 10.
[0062] Na construção de algumas implementações específicas de acordo com esta revelação, análise de elemento finito pode ser utilizada conforme conhecido àqueles técnicos no assunto. Em qualquer tal análise, os seguintes princípios de operação podem ser relevantes. Se um invólucro flexitensional é aproximado como um pistão, então para baixas frequências, a carga de massa, ou a massa de fluido equivalente que age no invólucro, é: onde M é a carga de massa, po é a densidade da água, e a é o raio equivalente para um pistão que corresponde ao tamanho do invólucro flexitensional.
onde M é a carga de massa, po é a densidade da água, e a é o raio equivalente para um pistão que corresponde ao tamanho do invólucro flexitensional.
[0063] O invólucro flexitensional tem uma constante de mola Kinvólucro na direção de movimento das bobinas elétricas. A primeira ressonância, fressonância, para o vibrador será substancialmente determinada pelo seguinte relacionamento de mola de massa
[0064] Para alcançar transmissão de energia eficiente com a faixa de frequência sísmica de interesse, é importante alcançar uma segunda frequência de ressonância dentro da faixa de frequência sísmica de interesse. Na ausência da mola de massa interna, a segunda frequência de ressonância ocorreria quando o invólucro flexitensional tem seu segundo modo Eigen. Esta frequência de ressonância, contudo, é normalmente muito mais alta do que a primeira frequência de ressonância, e, consequentemente, pode estar fora da faixa de frequência sísmica de interesse. Conforme é evidente da equação precedente, a frequência ressonante será reduzida se a carga de massa no invólucro flexitensional é aumentada. A carga de massa pode ser aumentada por adição de massa ao invólucro flexitensional; contudo, de modo a adicionar massa suficiente para alcançar uma segunda frequência de ressonância dentro da faixa de frequência sísmica de interesse, a quantidade de massa que necessitaria ser adicionada ao invólucro pode produzir tal um sistema não prático para uso em operações sísmicas marinhas.
[0065] De acordo com a presente revelação, uma segunda mola, a mola interna (por exemplo, mola interna 135 da Figura 3), pode ser incluída dentro do invólucro flexitensional com massas adicionadas no lado da mola interna. A mola extra, a mola interna, terá um fator de transformação Tinterno entre os eixos longo e curto de sua elipse, de modo que a deflexão das duas porções laterais terá uma amplitude mais alta do que a deflexão da extremidade fixada ao invólucro flexitensional e acionador bobina.
[0066] O efeito de tal uma massa adicionada é equivalente à massa de adição na extremidade do acionador onde ela é fixada ao invólucro.
[0067] O uso da mola interna, com a massa adicionada, pode permitir que a segunda ressonância do sistema seja girada de modo que a segunda ressonância esteja dentro da faixa de frequência sísmica de interesse, aperfeiçoando, desse modo, a eficiência do vibrador na faixa sísmica. onde Kinterna = constante de mola da mola interna.
onde Kinterna = constante de mola da mola interna.
[0068] É, desse modo, possível sintonizar a segunda ressonância, mas é também possível determinar quão grande uma influência desta segunda ressonância deve ter no sistema. Por exemplo, se a mola interna é muito fraca comparada ao invólucro flexitensional, e uma massa de equiparação é adicionada à mola interna, a mola interna com sua massa funcionará preferivelmente independentemente do invólucro. A segunda ressonância torna-se
[0069] Do mesmo modo, a segunda ressonância pode ser feita muito dominante por seleção de uma mola interna rígida com uma massa de equiparação, desse modo, tornando a segunda ressonância mais dominante do que a primeira.
[0070] Tendo explanado um exemplo adequado de um vibrador sísmico marinho, um sistema de controle, de acordo com esta revelação, será agora explanado. "Sistema de controle" conforme usado na presente revelação é pretendido para significar um sistema que usa medições de sensores acoplados à estrutura do vibrador ou são, de outro modo, associados com a estrutura do vibrador, a saída da qual são usados para ajustar um filtro ou operador de convolução tal que a saída verdadeira do vibrador tem um teor espectral mais prático ao teor espectral desejado, e que frequências harmônicas na saída do vibrador são adequadamente suprimidos.
[0071] Voltando agora à Figura 12, uma vista em corte transversal é mostrada do vibrador do exemplo que foi descrito acima com referência às Figuras 4 a 6. Os sensores 201 e 202 na Figura 12 podem ser colocados em ou acoplados às barras extremas. Dois outros sensores 205 e 206 podem ser acoplados a uma extremidade dos acionadores 207 e 208 na Figura 12. Em um exemplo, outro par de sensores 203 e 204 pode ser colocado na parte intermediária do invólucro em cada lado do vibrador. Em uma concretização, os sensores 201, 202, 205 e 206 podem ser qualquer tipo de sensor de movimento de partícula, por exemplo, geofones ou acelerômetros. Em uma concretização, os sensores 203 e 204 podem ser qualquer tipo de sensor de movimento de partícula ou um hidrofone disposto próximo à parede do invólucro. Os sensores 203 e 204 são tipicamente usados para um circuito fechado de realimentação de controle (explanado abaixo), visto que eles terão uma grande semelhança com o sinal de campo distante do vibrador marinho. Em outros exemplos, mais ou menos do que seis sensores podem ser usados para medir a resposta do vibrador em outras posições selecionadas.
[0072] O movimento de medição de sensores perpendicular à superfície do invólucro, mostrado na Figura 12 como sensores 203 e 204, pode medir a deflexão local em uma área próxima ao sensor. Na Figura 13, uma configuração é mostrada onde um acelerômetro 455 mede o movimento do invólucro perpendicular ao invólucro, e quatro acelerômetros 451-454 medem o movimento do invólucro no plano do invólucro. A deflexão média do invólucro é acoplada ao movimento do invólucro no plano do invólucro, perto das barras extremas. Uma vantagem possível desta configuração é que a saída dos sensores proporciona informação mais proximamente acoplada ao deslocamento de volume instantâneo do transdutor, comparado com um sensor que mede a deflexão local em um ponto no invólucro. Sensores de suporte terminal 201 e 202 na Figura 12 podem ser usados para a mesma proposta, mas o arranjo da Figura 13 pode ser vantajoso por medição de um sinal mais próximo à água, e evitando problemas de desempenho nas barras extremas.
[0073] Adicionalmente, pelo menos um sensor remoto (por exemplo, sensor remoto 27 na Figura 1) pode ser usado para medir a saída de campo distante a partir do transdutor. Em uma concretização, matrizes de sensor 24 na Figura 1 podem também serem usadas para esta proposta. A proposta principal do sistema de controle é gerar um sinal acústico pré-definido no campo distante. Portanto, a função de transferência a partir da localização do transdutor à localização aproximada de campo distante (matriz de sensor 24 ou sensor remoto 27 na Figura 1) é medida. O inverso desta função de transferência é computado, e a saída acústica na localização do vibrador é ajustada de modo que o sinal na localização de campo distante se equipara ao sinal de saída desejado o mais próximo possível.
[0074] Sob operação normal do vibrador, pode ser difícil medir sinais no campo distante, cisto que as amplitudes podem tipicamente serem baixas, e o ruído ambiente pode ter um efeito negativo nas medições e ILC. Consequentemente, em algumas concretizações, pode ser vantajoso usar um ou mais sensores locais para controle de ILC durante operação normal para tentar produzir uma forma de onda de saída desejada no campo distante (por exemplo, uma forma de onda mais próxima possível a um sinal teórico desejado ou sinal de referência). Baseado no conhecimento de como o sinal é afetado a medida que ele se desloca do vibrador para campo distante, um sinal de campo próximo desejado pode ser determinado que corresponde ao sinal de campo distante desejado. Isto pode permitir que o ILC proceda sem medir realmente o sinal no campo distante repetidamente (por exemplo, ele pode ser medido uma vez ou umas poucas vezes inicialmente).
[0075] Consequentemente, pode ser vantajoso determinar a função de transferência do sinal de campo próximo a campo distante, e vice versa. Isto pode ser feito usando, por exemplo, um chilro ou onda de seno em etapas, e medição de sinais em ambos o campo próximo e o campo distante ai mesmo tempo. Esta etapa tipicamente não necessita envolver ILC. O objetivo desta etapa é ser capaz de calcular um sinal de referência desejado para a saída acústica localmente, de modo a obter o sinal desejado no campo distante. Isto pode evitar medições adicionais do campo distante durante o processo de ILC atual. A função de transferência e a função de transferência inversa que foram determinadas podem, em seguida, ser usadas em combinação com ILC, usando somente informação de sensor de sensores locais. De acordo com uma concretização, o objetivo do ILC é controlar a saída, de modo que ela se equipare a um sinal de referência modificado que leva em conta a propagação do sinal no campo distante, tal que a saída desejada é obtida no campo distante.
[0076] A saída dos sensores mostrada na Figura 12 e na Figura 13 pode ser usada como entrada a um sistema de controle de aprendizagem iterativo (ILC) para mudar o sinal usado para acionar o vibrador (por exemplo, fonte de energia sísmica 18 na Figura 1), de modo que: (i) o vibrador terá uma saída de energia tendo características espectrais desejadas; (ii) as características espectrais de saída são repetíveis; e (iii) as harmônicas na saída do vibrador são substancialmente suprimidas.
[0077] Voltando agora à Figura 14, uma concretização de um sistema de ILC é mostrada. O gerador de sinal 301 pode proporcionar uma forma inicial do sinal sísmico a ser gerado pelo vibrador, por exemplo, uma varredura linear na faixa de 10 a 100 Hz. O gerador de sinal 301 pode formar parte do sistema de registro 16 da Figura 1. Os componentes funcionais do sistema de ILC podem também serem realizados em um computador de proposta geral que forma parte do sistema de registro, ou em outro computador. A saída do gerador de sinal 301 pode ser acoplada ao amplificador 302, que também recebe como entrada um sinal de correção gerado pelo ILC (explanado abaixo). A saída do amplificador 302, que pode ser referida como um "sinal do acionador corrigido", pode ser acoplada a um amplificador de energia, que aciona o vibrador. O vibrador pode ter acoplado a ele dois ou mais sensores (ver Figuras 12 e 13), conforme explanado acima. Coletivamente, o amplificador de energia, vibrador, e sensores são mostrados na caixa 303. Para a proposta desta Figura, deve ser compreendido que a "Fonte" se refere a ambos o próprio vibrador, bem como os sensores. Uma saída do sensor é mostrada na Figura 14 para simplicidade da ilustração; contudo, o mesmo princípio e componentes pode se aplicar a cada um dos sensores. A saída de um dos sensores é mostrada no sinal de saída do sensor 304, e representa o sinal de entrada em convolução com a função de transferência do vibrador no ponto de medição. O sinal de saída do sensor 304 pode ser usado no circuito 306 para subtrair ou comparar (por exemplo, determinar uma diferença) com o sinal de referência 305, que pode ser um sinal de saída do vibrador desejado. No circuito 307, a diferença entre o sinal de saída do sensor 304 e o sinal de referência 305 é combinada para gerar um sinal de correção de erro. O sinal de correção de erro é conduzido ao amplificador 302, conforme explanado acima.
[0078] A operação do ILC pode ser explanada conforme segue: O controle de aprendizagem iterativo (ILC) é um método de rastreio do controle de sistemas que operam em uma maneira repetitiva. Alguns exemplos de sistemas que operam em uma maneira repetitiva incluem manipuladores de braço de robô, processos químicos de batelada, equipamento de teste de confiabilidade, e, neste caso, vibradores marinhos. Em cada uma destas tarefas, o sistema tipicamente realiza a mesma ação repetidamente com alta precisão.
[0079] Pelo uso da informação de repetições anteriores, uma ação de controle adequada pode se verificar iterativamente. O princípio de modelo interno produz condições sob as quais rastreio essencialmente perfeito pode ser alcançado.
[0080] Um modelo invertido L da função de transferência do sistema pode ser produzido do sistema de vibrador. O mesmo sinal do acionador inicial, referido como u, pode ser repetido um número selecionado de vezes. Após cada iteração do sistema de ILC, o sinal do acionador de entrada u para o sistema de ILC pode ser atualizado. O sistema de ILC usa um sinal de referência, designado r, para comparar com a saída y a partir do sistema de vibrador. A diferença entre a saída do sistema de vibrador y e o sinal de referência r, denotada por e, pode, em seguida, ser filtrada pelo modelo invertido (usando, por exemplo, um filtro causal e um filtro não causal) e adicionada à entrada do sistema de ILC (por exemplo, no amplificador 302). O sistema de ILC é iterado, e se a função de transferência do sistema de ILC não muda mais rápido do que a atualização ao sinal do acionador de entrada, o erro e diminuirá com relação ao tempo.
[0081] O resultado desejado de operação do sistema de ILC é que o erro tende em direção a zero com o tempo, isto é, ek(t)—>0 quando k —> ». Para cada iteração do sistema, (k = k+1), Uk+i(t)=Uk(t)+L*ek(t). A saída do vibrador pode ser descrita pela expressão yk(t) = G*uk(t). O processo iterativo do ILC pode ser descrito pelas seguintes expressões: ek+1(t) = r-G*uk+1(t) = r-G*(uk(t)+L*ek(t)) = r-G*uk(t)-GL* ek(t) =(l -GL)ek(t) ek(t)->0 se(l-G(iw)L(iw))< l para todo w.
[0082] onde * denota o operador de convolução, i representa a raiz quadrada de (-1), e w representa a frequência angular. G e L representam, respectivamente, a função de transferência do sistema e a função de transferência do sistema inversa. G(iw) e L(iw) podem tipicamente não serem conhecidos para todas as frequências, porque eles não são medidos em todas as frequências. Portanto, um filtro passa-banda Q pode ser aplicado para filtrar as frequências desconhecidas (isto é, aquelas frequências não medidas pelos sensores mostrados nas Figuras 12 e 13). Isto pode ser realizado conforme segue:
[0083] Ajustar uk+1 = Q1*(uk+Q2L*ek). Em seguida, é possível obter operação de ILC estável se Qi(iw)(i -Q2G(iw)L(iw)) < 1 é satisfeita para todo w.
[0084] Para um ILC convergido, Uk+i = Uk que dá d do qual pode ser obtido
d do qual pode ser obtido  Para calcular o erro estacionário e, o seguinte pode ser usado: , que dá
Para calcular o erro estacionário e, o seguinte pode ser usado: , que dá 
[0085] O erro de espaço de estado e é zero para qualquer w quando Qi(iw)=1. O precedente usa a suposição que o sinal do acionador torna- se invariante. Para obter uma adaptação variante vagarosa e cessação final de mudança de Uk+1, o fator de ganho Q2 pode ser usado. Se o sistema de vibrador é não linear, e se a mudança para cada iteração é grande, ela pode mudar a função de transferência muito rapidamente, e o sistema de controle pode não convergir conforme sugerido acima. A não convergência pode também ocorrer se o sistema de vibrador muda a função de transferência mais rápido do que o tempo para cada iteração. Durante o teste do sistema precedente de ILC, os fatores de ganho de Q1=1, Q2=0,3 foram verificados proporcionar um bom resultado. Para manipular as harmônicas, o sistema de controle tipicamente terá uma largura de faixa de 1.000 Hz mesmo se o sinal sísmico gerado pelo sistema de vibrador é tipicamente 100 Hz ou mais baixo. Pode ser vantajoso medir a função de transferência do sistema a 1.000 Hz para ser capaz de atenuar as harmônicas até 1.000 Hz. Se é desejado atenuar as harmônicas até 2.000 Hz, a largura de faixa do sistema de controle pode ser ajustada consequentemente. A largura de faixa pode incluir, entre outros parâmetros, a faixa de frequência dos sensores mostrada na Figura 12 e Figura 13, a faixa de frequência de sinal de referência 305 na Figura 14, e a faixa de frequência do sinal do acionador corrigido.
[0086] O procedimento precedente pode, em alguns casos, ser implementado no domínio de frequência. Foi observado que certas frequências podem estar ausentes na saída de um ou mais dos sensores mostrados na Figura 12 e Figura 13, particularmente nas frequências acima da segunda ressonância (segunda frequência de ressonância 112 na Figura 7). Os valores zero em certas frequências podem tornar o sistema de ILC instável, porque a função de erro no domínio de frequência inclui divisão (que seria divisão por zero nas frequências de amplitude zero). Por adição da saída do segundo sensor, a presença de frequências de amplitude zero na saída de sensor combinada pode ser substancialmente eliminada, tornando a implementação do sistema precedente estável no domínio de frequência.
[0087] Uma implementação de exemplo do procedimento precedente no domínio de frequência é mostrada esquematicamente na Figura 15, na qual o sinal acionador desejado 400 no domínio de frequência pode ser transformado ao domínio de tempo, tal como por transformada de Fourier rápida inversa em IFFT 402, para proporcionar um sinal acionador análogo para operar o vibrador, em sinal do vibrador análogo 404. A saída dos sensores (por exemplo, aquelas mostradas na Figura 12 e na Figura 13) pode ser transformada ao domínio de frequência tal como por transformada de Fourier rápida em FFT 406 para proporcionar uma representação da saída do vibrador atual 408 em resposta ao sinal do acionador de entrada. O sinal de referência 410 pode ser combinado com a saída de sensor de FFT no circuito 412 para gerar um sinal de erro. Um termo de correção é, em seguida, determinado no circuito 414 a partir do sinal de erro. O termo de correção pode ser somado no circuito 416 com o sinal do acionador para gerar na saída 418 o sinal do acionador subsequente.
[0088] Matematicamente expressa (onde letras capitais representam o domínio de frequência): Uk+i(iw) = Qi(iw))(Uk(iw) + Q2L(iw)*(R(iw)-Y(iw))) onde L(i w o) é uma matriz inversa aproximada para a matriz G(i w).
[0089] O critério de estabilidade pode ser avaliado similarmente conforme explanado acima com referência ao sistema de ILC de tempo- domínio: ||Qi(iw)(1-Q2G(iw)L(iw)) || < 1
[0090] Uma vantagem particular em usar mais do que um sensor como entrada para o ILC é a baixa probabilidade de ter amplitude zero a qualquer frequência única na faixa de frequência sísmica de interesse, mais harmônicas da mesma. Pela eliminação substancialmente das frequências de amplitude zero, a implementação do ILC no domínio de frequência é aperfeiçoada por redução de exemplos de divisão por zero.
[0091] O uso de mais do que um sensor em combinação com atuadores individualmente controláveis, pode proporcionar a capacidade de controlar a deflexão de saída de transdutor em mais do que uma localização no invólucro. A Figura i7 mostra um exemplo de um sistema de controle para um vibrador com dois atuadores (por exemplo, um para cada lado do vibrador) acionados por dois amplificadores, detectando deflexão de invólucro de saída com dois sensores (por exemplo, um em cada lado) usados para controle de realimentação. Conforme pode ser visto, a funcionalidade da Figura i7 é geralmente similar àquela da Figura i4. A diferença principal é que dois sinais de saída podem ser medidos, e dois sinais de atuador podem ser corrigidos, baseados no conhecimento sobre o acoplamento entre cada combinação de sinal do acionador de entrada e cada sinal do sensor. Comparada à Figura i4, numerais de referência correspondente foram usados: geradores de sinal 52i-i e 52i-2 correspondem ao gerador de sinal 30i; amplificadores 522-i e 522-2 correspondem ao amplificador 302; caixa 523 corresponde à caixa 303; sinais de saída de sensor 524-1 e 524-2 correspondem ao sinal de saída de sensor 304; circuitos 526-1 e 526-2 correspondem ao circuito 306; sinais de referência 525-1 e 525-2 correspondem ao sinal de referência 305; e o circuito 527 corresponde ao circuito 307.
[0092] Os dois sinais de controle podem ser coletados no vetor ee e os dois sinais de sensor no vetor
ee e os dois sinais de sensor no vetor  ; A matriz L é uma matriz dois por dois que aproxima um inverso da matriz G. Para Qi=I e um ganho dependente da frequência Q2(iw), a equação de atualização torna-se Uk+i(iw) = Uk(iw) + Q2(iw) L(iw)*(R(iw)-Y(iw)).
; A matriz L é uma matriz dois por dois que aproxima um inverso da matriz G. Para Qi=I e um ganho dependente da frequência Q2(iw), a equação de atualização torna-se Uk+i(iw) = Uk(iw) + Q2(iw) L(iw)*(R(iw)-Y(iw)).
[0093] O acoplamento mecânico entre os dois lados pode ser significante em algumas concretizações. Um ajuste do sinal de entrada a um atuador pode mudar o sinal de saída em ambos os lados, particularmente a frequências mais altas. É, em muitos casos, possível determinar dois sinais de entrada que gerarão o sinal de saída desejado em ambos os lados. Em geral, no domínio de frequência, a função de transferência do sistema a partir das entradas de sensor m para as saídas do atuador n, será dada por uma matriz m x n em cada frequência. Por exemplo, para duas entradas e duas saídas, a matriz será uma matriz 2 x 2 1 para cada frequência. Embora possa ser possível ter um sistema com m < n, pode ser vantajoso ter m > n de modo a permitir controle suficiente.
1 para cada frequência. Embora possa ser possível ter um sistema com m < n, pode ser vantajoso ter m > n de modo a permitir controle suficiente.
[0094] Esta matriz de função de transferência consiste de números complexos representando a resposta de fase e de amplitude para cada combinação de entrada e saída. Neste exemplo, os elementos diagonais L11, L22 nesta matriz representarão respectivamente a função de transferência a partir do atuador do lado esquerdo para o sensor do lado esquerdo, e a função de transferência a partir da entrada do atuador do lado direito para o sensor do lado direito. Os outros dois elementos L12 e L21 são o acoplamento cruzado entre a entrada do atuador do lado esquerdo, e o sensor do lado direito, e vice versa. Para cada componente de frequência, os dois sinais de entrada podem ser determinados se a matriz de função de transferência G(i w) é invertível. A matriz G 2 x 2 neste exemplo pode ser invertida se a determinante não é igual a 0. Este, por exemplo, tipicamente será o caso quando o acoplamento direto é muito mais forte do que o acoplamento cruzado, ou vice versa. A mesma abordagem pode ser estendida a todas as frequências controladas, e a outras configurações com mais do que dois sensores e dois atuadores. O número de entradas de atuador disponíveis determinará o número máximo de localizações de sensor de saída que pode ser controlado independentemente. Se o acoplamento cruzado mecânico é baixo, dois controladores independentes de ILC podem ser usados, conforme mostrado na Figura 16. Isto significa que /Lll 0 \ a matriz L é diagonal, isto é, ela tem a forma . Em ambos os casos, o Q2(iw) é uma função de ganho escalar na faixa 0 a 1 aumentando a robustez do algoritmo. Uma boa escolha foi verificada em algumas concretizações para ser Q2=0,3.
. Em ambos os casos, o Q2(iw) é uma função de ganho escalar na faixa 0 a 1 aumentando a robustez do algoritmo. Uma boa escolha foi verificada em algumas concretizações para ser Q2=0,3.
[0095] Um sistema de vibrador marinho operado usando dois ou mais sensores como entrada para um sistema de ILC pode proporcionar controle mais estável sobre o conteúdo de espectro e melhor rejeição de harmônicas do que sistemas usando somente um único sensor para controlar o ILC.
[0096] Na Figura 16, dois controladores independentes de ILC similares ao controlador da Figura 14 são mostrados. O gerador de sinal 501 pode proporcionar uma forma inicial do sinal sísmico ser gerado pelos vibradores, por exemplo, uma varredura linear na faixa de 10 a 100 Hz. A saída do gerador de sinal 501 pode ser acoplada aos amplificadores 502-1 e 502-2 que também recebem como respectiva entrada sinais de correção gerados pelo ILC (explanado abaixo). A saída dos amplificadores 502-1 e 502-2, que pode ser referida como "sinais de acionadores corrigidos" pode ser acoplada a um amplificador de energia, que acionam o vibrador. O vibrador pode ter acoplado ao mesmo dois ou mais sensores (ver Figuras 12 e 13), conforme explanado acima. Coletivamente, os dois conjuntos de amplificadores de energia, vibradores, e sensores, são mostrados em caixas 503-1 e 503-2. Para a proposta desta figura, deve ser compreendido que a "Fonte 1" e "Fonte 2" se referem a ambos os próprios vibradores, bem como os sensores. A saída dos sensores é mostrada em sinais de saída de sensor 504-1 e 504-2, que representam o sinal de entrada em convolução com a função de transferência dos vibradores no ponto de medição. Os sinais de saída de sensor 504-1 e 504-2 podem ser usados em circuitos 506-1 e 506-2 para subtrair ou comparar (por exemplo, determinar uma diferença) com sinal de referência 505, que pode ser um sinal de saída do vibrador desejado. Nos circuitos 507-1 e 507-2, as diferenças entre os sinais de saída do sensor 504-1 e 504-2 com relação ao sinal de referência 505 são combinadas para gerar sinais de correção de erro. Os sinais de correção de erro são conduzidos aos amplificadores 502-1 e 502-2, conforme explanado acima.
[0097] Conforme discutido acima, o controle de ILC, em algumas concretizações, usa um modelo do transdutor de modo a computar as correções a serem aplicadas iterativamente aos sinais de entrada do atuador. Em uma concretização, os valores iniciais para este modelo podem ser gerados por realização de uma medição de função de transferência inicial do transdutor antes do início do controle de ILC. A função de transferência tipicamente depende da amplitude de acionamento e do tipo de sinais usados para esta medição. Os sinais de baixa frequência, alta amplitude, podem ser usados para manter as partes do transdutor se movendo, enquanto que medindo resposta de baixa amplitude a frequências mais altas. A abordagem pode reduzir o efeito de aderência e assegurar que os dados medidos representem uma função de transferência média adequada para todas as deflexões esperadas durante operação normal. O sinal de baixa frequência, alta amplitude, pode ter uma frequência mais baixa e uma amplitude mais alta do que o sinal de excitação que está sendo medido para a proposta de gerar o modelo inicial. De acordo com uma concretização, o sinal de baixa frequência, alta amplitude, pode estar na porção de frequência mais baixa da faixa de áudio (ou abaixo da faixa de áudio), e que tem uma amplitude na mesma faixa como amplitudes operacionais típicas.
[0098] O sinal de correção requerido durante operação normal está, a frequências mais altas, acima da faixa de áudio, tipicamente de baixa amplitude relativa aos sinais de alta energia usadas para criar o sinal sísmico desejado na faixa de áudio. O erro de fase no modelo de transdutor usado para ILC pode ser menor do que ±90 graus para todas as frequências usadas na faixa de controle. Em algumas concretizações, nem todas as frequências necessitam serem usadas — por exemplo, certas frequências podem ser ignoradas, e ILC pode ser realizado em outras frequências. Para todas as frequências usadas para ILC, contudo, o erro de fase no modelo de transdutor pode ser menor do que +90 graus. Verificou-se que as medições de fase e de amplitude a frequências mais altas (por exemplo, acima da faixa de áudio sísmica) são dependentes do sinal transmitido nesta faixa sísmica.
[0099] A fricção estática é definida como a fricção entre dois ou mais objetos sólidos que não estão se movendo relativo entre si. A fricção dinâmica ocorre quando dois objetos estão se movendo relativos entre si e friccionam juntos. A fricção estática é frequentemente maior do que a fricção dinâmica. Os atuadores de acordo com esta revelação podem realizar um movimento alternativo quando uma única frequência é aplicada ao atuador. Isto significa que a velocidade do atuador pode ser igual a zero duas vezes durante um período da frequência aplicada. Cada vez que isto ocorre, alguma aderência pode ocorrer, que pode afetar a medição da função de transferência. A aplicação de um sinal de baixa frequência, alta amplitude simultaneamente com a alta frequência pode reduzir o número de stand-stills.
[00100] Uma concretização de adição de tal sinal de baixa frequência, alta amplitude pode ser vista na Figura 18. Vários lotes de deslocamento de acionador vs. tempo são mostrados por uma duração de 10 ms. O sinal de alta frequência 551 mostra o deslocamento do acionador excitado com um sinal de 400 Hz com amplitude 0,2. Pode ser visto que se somente este sinal de 400 Hz é aplicado ao acionador, ele alcançará 8 stand-stills 555. Quando um sinal de baixa frequência 552 de 100 Hz com amplitude 1,0 é adicionado ao sinal de alta frequência 551, sinais combinados 553 e 554 que podem resultar conterão um número pequeno de stand-stills 555 (por exemplo, 4-6) comparado a quando somente o sinal de alta frequência é usado. As curvas mostradas em sinais combinados 553 e 554 contêm as mesmas duas frequências, com a mesma amplitude. A fase dos 400 Hz foi mudada 90 graus entre os sinais combinados 553 e 554. Pode ser visto que a fase entre os dois sinais pode afetar o número de stand-stills 555 que ocorrerá.
[00101] Para ilustrar os efeitos de desvio de fase, a Figura 19 mostra um gráfico de dois sinais de acionamento 601 e 602 que ambos contêm um sinal de 100 Hz e um sinal de 300 Hz com a mesma amplitude. A fase do sinal de 300 Hz difere por 90 graus. Conforme pode ser visto, a amplitude de pico difere significantemente. Para um vibrador não linear, a fase entre componentes de frequência diferente no sinal pode ser importante. Se o transdutor satura ou alcança um limite mecânico em alguma alta amplitude de acionamento, conforme mostrado no pico 603, a função de transferência medida pode diferir a partir da condição de acionamento dada pelo sinal de acionamento 602, que tem amplitude de pico mais baixa.
[00102] A fricção é tipicamente não uniforme sobre o ciclo de deflexão do transdutor. Ela pode ser vantajosa para o modelo refletir o comportamento do transdutor a medida que suas partes se movem em todas as posições usadas durante uma deflexão. Um sinal de alta amplitude, baixa frequência, pode ser usado para assegurar que as medições da função de transferência de alta frequência são registradas usando todas as deflexões usadas pelos atuadores durante operação normal.
[00103] O desempenho mecânico nas articulações pode ter uma influência não linear e afeta a função de transferência. As frequências mais altas, amplitudes de sinal tipicamente pequenas serão requeridas para a correção aplicada durante operação de ILC. A aplicação de sinais de amplitude similar durante as medições iniciais de função de transferência pode conduzir a erros significantes. Se o desempenho mecânico é igual a ou maior do que a amplitude de excitação usada durante a medição da função de transferência, os sinais de saída do sensor serão próximos a zero, tornando a medição da função de transferência insegura.
[00104] Uma não linearidade no vibrador marinho pode gerar harmônicas e/ou frequências de intermodulação. Os conteúdos de frequência dos sinais usados para a medição da função de transferência podem ser escolhidos; contudo, de modo que as harmônicas e intermodulações não coincidam com a frequência a ser medida.
[00105] Um ou mais sinais de baixa frequência, alta amplitude (por exemplo, com amplitudes mais próximas praticamente possíveis à amplitude usada durante transmissão normal) podem ser usadas para manter as partes de transdutor que se movem através do ciclo de deflexão total, enquanto que medindo a resposta de baixa amplitude a frequências mais altas. Esta abordagem pode reduzir o efeito de aderência e assegurar que os dados medidos representam uma função de transferência média adequada para todas as deflexões esperadas durante operação normal.
[00106] O sinal de entrada u_tot(t) usado para medição de função de transferência pode ser escolhido como u_tot(t) = p(t) + u_0(t) onde é um sinal de alta amplitude, baixa frequência, e
é um sinal de alta amplitude, baixa frequência, e
[00107] onde é um sinal de excitação usado para encontrar a função de transferência na frequência f. Para certificar que não existe interação entre as harmônicas de sinal p(t) e o sinal u_0, pode ser vantajoso assegurar que não existe inteiro N tal que N*f_p = f. Isto pode ser feito por mudança da frequência f_p levemente, por exemplo, encontrando um N tal que
é um sinal de excitação usado para encontrar a função de transferência na frequência f. Para certificar que não existe interação entre as harmônicas de sinal p(t) e o sinal u_0, pode ser vantajoso assegurar que não existe inteiro N tal que N*f_p = f. Isto pode ser feito por mudança da frequência f_p levemente, por exemplo, encontrando um N tal que
[00108] (N+0,5)f_p = f, minimizando o desvio entre a resultante f_p e alguma frequência alvo f_p,alvo.
[00109] Os sinais de baixa frequência podem ser aplicados a todos os atuadores simultaneamente, pelo que o sinal de alta frequência pode ser aplicado somente a um atuador em um tempo quando as funções de transferência são medidas.
[00110] De acordo com algumas concretizações, o controle preciso da saída de campo distante de um vibrador marinho é importante para sua utilidade na aquisição de dados sísmicos. Para frequências mais baixas, o vibrador geralmente será pequeno comparado com o comprimento de onda. Foi mostrado acima nas Eqs. 1-10 que o vibrador marinho operará com carregamento reativo a partir da água. A impedância causada pela água que circunda o vibrador marinho é geralmente dependente da frequência.
[00111] No interior do campo próximo de um vibrador (por exemplo, onde os efeitos de superfícies geralmente operando parcialmente fora de fase podem ser importantes), uma medição a uma distância radial (fechada) pode não se relacionar diretamente à medições a distâncias maiores na mesma direção pela lei de difusão esférica.
[00112] O espectro de pressão registrado com um hidrofone perto do campo pode, portanto, não ser o mesmo conforme o espectro registrado com um hidrofone de campo distante.
[00113] Voltando agora à Figura 20, um diagrama esquemático das trajetórias de sinais do vibrador, é mostrado. O vibrador marinho 701 é rebocado por uma embarcação em um corpo de água. O vibrador marinho 701 inclui sensor(es) local(is) 708, e sensor(es) remoto(s) 703 são colocados a uma localização mais distante. A energia ascendente mostrada na trajetória 705, que atinge a superfície do mar 700, pode ser refletida para baixo ao longo da trajetória 706 ao(s) sensor(es) remoto(s) 703. O vibrador marinho 701 pode, portanto, vantajosamente ser operado a uma profundidade correspondente a aproximadamente um quarto do comprimento de onda na frequência de centro da saída do vibrador marinho, de modo a obter interferência construtiva, e maximizar saída de energia na direção vertical para baixo. A fase do sinal refletido relativa ao sinal direto dependerá da frequência e do ângulo de observação "a" na Figura 20. Nas frequências mais altas, a diferença no comprimento da trajetória entre a trajetória direta 702 e a trajetória refletida (isto é, trajetórias 705 e 706) pode ser significante, comparada com o comprimento de onda. Um espectro medido no(s) sensor(es) remoto(s) 703 pode conter uma ondulação na frequência causada pela interação entre a energia recebida diretamente do vibrador marinho 701, versus a energia refletida, via a superfície do mar.
[00114] A amplitude acústica e o espectro de fase podem, portanto, depender de onde é medida. A saída acústica a partir do vibrador pode, portanto, ser medida a uma distância maior comparada com o tamanho do vibrador marinho no(s) sensor(es) remoto(s) 703. Ao mesmo tempo, a saída é registrada com sensor(es) local(is) 708 em, dentro de, ou perto do vibrador. A função de transferência G_ld(f) de sensor(es) local(si) 708 para sensor(es) remoto(s) 703 é computada. A função de transferência inversa L_dl(f) pode ser computada como 1/G_ld(f).
[00115] Um sinal de saída predeterminado Y distante a ser gerado no campo distante na direção "a" é multiplicado com função de transferência inversa L_dl(f) de modo a obter a sinal(is) de saída desejado(s) Y_d_loc para sensor(es) local(is) 708. O algoritmo de ILC pode, em seguida, ajustar iterativamente os sinais de entrada do atuador do vibrador marinho até que a saída Y_ioc do(s) sensor(s) local(is) seja igual a Y_d_loc.
[00116] Outra vantagem de algumas concretizações desta revelação é a capacidade para o ILC manipular as fontes impulsivas (por exemplo, canhões pneumáticos) em proximidade às fontes de vibrador marinho e sensores.
[00117] Em áreas onde o vibrador marinho está operando próximo aos canhões pneumáticos, e/ou outras fontes impulsivas, o sistema de ILC pode vantajosamente manipular estes outros pulsos. O vibrador marinho tipicamente transmitirá repetidamente pulsos relativamente longos com (por exemplo) duração de 30-100 segundos. Vários tipos de formas de onda podem ser usados, por exemplo, uma varredura de frequência sobre a faixa de frequência do vibrador marinho (um chilro). A mesma forma de onda de vibrador de baixa frequência pode tipicamente ser repetida mais ou menos continuamente.
[00118] Os canhões pneumáticos, em contraste, tipicamente transmitem pulsos ou disparos discretos, por exemplo, de 10 em 10 segundos. O disparo exato dos tiros da pistola de ar pode tipicamente ser determinado baseado na posição de carregamento (tipicamente determinado, via GPS). Por exemplo, os tiros da pistola de ar são tipicamente produzidos em posições espacialmente uniformemente distribuídas. A transmissão do vibrador marinho pode, portanto, vantajosamente, ser dessincronizada a partir do disparo da pistola de ar, de modo que os pulsos da pistola de ar tipicamente não aparecem na mesma localização no tempo, com relação ao sinal transmitido a partir do vibrador marinho.
[00119] O sistema de ILC do vibrador marinho na presença de fontes impulsivas, tais como canhões pneumáticos, pode usar o fato que o mesmo sinal (ou conjunto de sinais) é geralmente repetido várias vezes.
[00120] Conforme descrito acima, o sistema de controle pode medir a saída atual na água e, em seguida, calcular um ajuste ao próximo sinal de entrada para os acionadores do atuador, de modo que o próximo sinal de saída estará mais próximo à saída desejada, conforme comparado com a saída atual medida. De modo que o sistema de controle iterativo opera bem, a saída do vibrador, desse modo, deve ser medida precisamente.
[00121] Certas partes (no domínio de tempo) do sinal de saída medido do vibrador marinho pode conter energia de interferência de pulsos de canhão de ar. Estas partes podem ser identificadas de vários modos. Sinais de disparo da pistola de ar e retardos de propagação conhecidos podem ser usados em algumas concretizações. É também possível detectar estes sinais pela consideração do sinal de erro no sistema de controle. O sinal de erro tipicamente será maior para segmentos de tempo quando os sensores de saída captam sinais indesejados de pulsos da pistola de ar. Isto significa que quando um aumento súbito é observado no sinal de erro em um intervalo de tempo específico, isto pode ser provavelmente uma indicação de sinais de interferência de canhões pneumáticos de exemplo, ou alguma outra fonte impulsiva, preferivelmente do que um problema súbito dentro do controle do vibrador.
[00122] O sistema de controle iterativo pode, em algumas concretizações, ser ajustado para aplicar correções mais vagarosamente, e ignorar partes do sinal onde interferência está presente. Por exemplo, não se necessita corrigir todas as partes da forma de onda em uma iteração. É, desse modo, possível deixar o sistema de ILC operar em somente os segmentos de tempo onde nenhuma energia de interferência está presente nos sinais de sensor.
[00123] O ILC pode, desse modo, ser capaz de controlar todas as partes do sinal de saída, dado que ele pode medir precisamente todas as partes do sinal, mas ele não necessita fazer isto em cada iteração, isto é, para toda única transmissão da forma de onda. Consequentemente, pode ser vantajoso assegurar que pulsos da pistola de ar de interferência não ocorram repetidamente na mesma localização (posição no tempo), referenciada ao começo da transmissão do vibrador marinho. Isto é, os pulsos da pistola de ar e as transmissões do vibrador marinho podem ser dessincronizados.
[00124] O sistema de vibrador marinho pode, portanto, ser dessincronizado a partir do sistema de transmissão da pistola de ar. Isto pode ser feito em vários modos. Uma concretização começa enviando o sinal do vibrador após um retardo aleatório (por exemplo, 0-10 segundos), após os canhões pneumáticos estarem transmitindo.
[00125] Outra concretização ajusta os comprimentos de pulso do vibrador de modo que eles não são um ainda múltiplo do tempo entre pulsos de pistola de ar. Se, por exemplo, pulsos de pistola de ar são transmitidos de 10 em 10 segundos, e o vibrador envia um pulso de 33 segundos repetidamente, os pulsos da pistola de ar podem não ocorrer na mesma posição no tempo em cada registro da saída do sinal de saída do vibrador marinho. Isto pode ser suficiente para assegurar que o algoritmo de ILC pode medir todas as partes do sinal de saída algum do tempo.
[00126] Para detectar a presença de pulsos de pistola de ar (ou outros distúrbios intermitentes grandes), e para minimizar o efeito prejudicial no algoritmo de ILC, o seguinte método pode ser usado em uma concretização.
[00127] Primeiro, calcular o sinal de erro e(t) = r(t) - y(t) como a diferença entre o sinal desejado r(t) e sinal medido y(t) sobre o intervalo de medição . Se vários sensores são usados e, r e y podem ser vetor valorizado. O sinal de detecção aberrante d(t) é calculado como uma convolução entre uma função de janela adequada w(t) e o valor absoluto do sinal de erro e(t), e normalizado com a energia de erro total. Por exemplo, ele pode ser expresso conforme segue:
[00128] Se e é uma quantidade valorizada de vetor, a energia de erro momentânea pode ser usada:
[00129] Uma escolha possível de função de janela é uma função de carro de caixa retangular, dando:
[00130] onde um valor adequado de A está relacionado ao comprimento esperado do distúrbio (por exemplo, 100 milissegundos), e T é a duração total do sinal transmitido (por exemplo, 10 segundos). Esta "robustez" mudará o sinal de erro e(t) a uma versão robusta er(t) conforme segue:
[00131] Aqui, dlimite é um parâmetro que determina qual nível de distúrbio será considerado anormal. O sinal de erro tornado robusto er(t) está, em seguida, substituindo o sinal de erro e(t) no algoritmo de ILC.
[00132] Se a atualização do sinal de controle é feita no domínio de frequência, ele pode, desse modo, tomar a forma: Uk+i(iw)) = Qi(iw)Uk(iw) + Q2L(iw)Er(iw)),
[00133] onde Er(i w) é o FFT do sinal de domínio de tempo tornado robusto er(t).
[00134] Voltando agora às Figuras 2i-24, vários fluxos de processo, de acordo com as concretizações desta revelação, são mostrados.
[00135] A Figura 2i é um fluxograma de um método para controle de um vibrador marinho, via atuadores múltiplos usando ILC, de acordo com uma concretização. O fluxo começa na etapa 900.
[00136] Na etapa 900, a saída acústica é medida por pelo menos dois sensores de um vibrador marinho. Por exemplo, os sensores podem estar em respectivas posições dentro de ou no vibrador marinho. A saída acústica medida pelos sensores pode ser gerada pelo vibrador marinho. O fluxo procede para a etapa 902.
[00137] Na etapa 902, os sinais de atuação para o vibrador marinho são iterativamente mudados baseados na saída acústica medida e em um sinal de referência especificado. Por exemplo, o sinal de referência especificado pode ser uma saída desejada para o vibrador marinho. Extremidades de fluxo (ou, em algumas concretizações, repetições) na etapa 902.
[00138] A Figura 22 é um fluxograma de um método para uso de sinais de baixa frequência para reduzir os efeitos de fricção estática. O fluxo começa na etapa 9i0.
[00139] Na etapa 9i0, os primeiros sinais de entrada são providos a um vibrador marinho. Os primeiros sinais de entrada podem incluir um sinal de excitação e um sinal de alta amplitude, baixa frequência, operável para diminuir os efeitos de fricção no vibrador marinho. O fluxo procede para a etapa 9i2.
[00140] Na etapa 9i2, a saída acústica do vibrador marinho é medida. Por exemplo, esta medição pode ser efetuada, via um ou mais sensores dentro de ou no vibrador marinho, e/ou um ou mais sensores em uma região de campo distante do vibrador marinho. O fluxo procede para a etapa 914.
[00141] Na etapa 914, os valores iniciais para uma função de transferência do vibrador marinho são gerados baseados na saída acústica medida da etapa 912. Extremidades de fluxo na etapa 914.
[00142] A Figura 23 é um fluxograma de um método para calibrar um vibrador marinho usando ILC baseado em uma função de transferência entre medições de distância perto do campo e do campo. O fluxo começa na etapa 920.
[00143] Na etapa 920, a saída acústica de um vibrador marinho é medida. A medição pode ser efetuada, via pelo menos um sensor local para o vibrador marinho, e pelo menos um sensor remoto a partir do vibrador marinho. Por exemplo, o sensor local pode estar localizado dentro de, no, ou próximo ao vibrador marinho. O sensor remoto pode estar localizado em uma região de campo distante do vibrador marinho. O fluxo procede para a etapa 922.
[00144] Na etapa 922, um sinal de atuação do vibrador marinho é ajustado baseado nas medições da etapa 920, bem como um sinal de referência. O sinal de referência pode ser, por exemplo, uma saída desejada do vibrador marinho. O fluxo procede para a etapa 924.
[00145] Na etapa 924, as etapas de medição e ajuste (por exemplo, etapas 920 e 922) são repetidas até que uma condição limite seja encontrada. Por exemplo, a repetição pode ajustar o sinal de atuação para produzir um sinal de saída de campo distante desejado para dentro de uma tolerância de campo especificada. Extremidades de fluxo na etapa 924.
[00146] A Figura 24 é um fluxograma de um método para operação de um vibrador marinho em conjunto com fontes de sinal impulsivo (por exemplo, um ou mais canhões pneumáticos) usando ILC. Em geral, este método pode ser aplicado a qualquer distúrbio intermitente grande. Conforme mostrado, o método da Figura 24 é um método iterativo. O fluxo começa na etapa 930.
[00147] Na etapa 930, pelo menos um sensor mede a saída acústica de um vibrador marinho e pulsos de sinal de pelo menos um distúrbio intermitente grande. O fluxo procede para a etapa 932.
[00148] Na etapa 932, para uma primeira uma ou mais iterações, o sinal de atuação é deixado não mudado em resposta a uma indicação que a resistência de sinal medida dos pulsos de sinal a partir do pelo menos um distúrbio intermitente grande excede um limite especificado. Por exemplo, a indicação que a resistência de sinal medida dos pulsos de sinal a partir do pelo menos um distúrbio intermitente grande pode indicar que uma pistola de ar está atualmente em disparo. O fluxo procede para a etapa 934.
[00149] Na etapa 934, para uma segunda uma ou mais iterações, o sinal de atuação é mudado baseado em uma diferença entre um sinal de saída de campo distante desejado e as medições. O sinal de atuação pode ser mudado em resposta a indicação não excedendo o limite especificado. Conforme mostrado, a mudança pode ajustar o sinal de atuação para produzir o sinal de saída de campo distante desejado para dentro de uma tolerância de campo especificada. Extremidades de fluxo na etapa 934.
[00150] Enquanto que esta revelação tenha sido descrita com relação a um número limitado de concretizações, aqueles técnicos no assunto tendo o benefício desta revelação apreciarão que outras concretizações podem ser consideradas, que não fogem do escopo das reivindicações conforme aqui reveladas.
[00151] Embora concretizações específicas tenham sido descritas acima, estas concretizações não são pretendidas para limitar o escopo da presente revelação, mesmo onde somente uma única concretização é descrita com relação a uma característica particular. Exemplos de características proporcionadas na revelação são pretendidos para serem ilustrativos preferivelmente do que restritivos, a menos que de outro modo citado. A descrição acima é pretendida para cobrir tais alternativas, modificações, e equivalentes, conforme seria aparente a um técnico no assunto tendo o benefício desta revelação.
[00152] O escopo da presente revelação inclui qualquer característica ou combinação das características aqui reveladas (ou explicitamente ou implicitamente), ou qualquer generalização destas, se ou não elas evitam qualquer ou todos dos problemas aqui determinados. Várias vantagens da presente revelação foram aqui descritas, mas concretizações podem proporcionar, todas, ou nenhuma de tais vantagens, ou podem proporcionar outras vantagens.
Claims (20)
1. Sistema, caracterizado pelo fato de que compreende: um vibrador marinho (18, 701), no qual o vibrador marinho (18, 701) é configurado para gerar saída acústica; pelo menos um sensor (708) local ao vibrador marinho (18, 701); pelo menos um sensor (703) remoto a partir do vibrador marinho (18, 701); e uma unidade de controle (16) configurada para mudar iterativamente um sinal de atuação para o vibrador marinho (18, 701) baseado em: um sinal de referência; e medições da saída acústica por pelo menos um sensor (708) local ao vibrador marinho (18, 701) e uma ou mais funções de transferência que mapeiam uma saída acústica esperada em campo distante para uma saída acústica local correspondente ao vibrador marítimo (18, 701), em que uma ou mais funções de transferência são determinadas a partir de medições da saída acústica de ambos o pelo menos um sensor (708) local para o vibrador marinho e o pelo menos um sensor (703) remoto a partir do vibrador marinho (18, 701).
2. Sistema, de acordo com a reivindicação 1, caracterizado pelo fato de que mudar iterativamente o sinal de atuação inclui: usar a uma ou mais funções de transferência para gerar uma estimativa de saída acústica no campo distante baseada nas medições da saída acústica por pelo menos um sensor (708) local ao vibrador marinho (18, 701); e mudar o sinal de atuação baseado na estimativa.
3. Sistema, de acordo com a reivindicação 2, caracterizado pelo fato de que a unidade de controle (16) é adicionalmente configurada para: gerar a uma ou mais funções de transferência antes de mudar iterativamente o sinal atuante, sendo que para gerar uma ou mais funções de transferência, a unidade de controle (16) é ainda configurada para: fazer com que o vibrador marinho (18, 701) gere um sinal de saída selecionado; e coletar, através de pelo menos um sensor (708) local para o vibrador marinho (18, 701) e pelo menos um sensor (703) remoto do vibrador marinho (18, 701), medições do sinal de saída selecionado; e gerar uma ou mais funções de transferência a partir das medições do sinal de saída selecionado.
4. Sistema, de acordo com a reivindicação 2, caracterizado pelo fato de que a unidade de controle (16) é adicionalmente configurada para: realizar uma caracterização inicial do vibrador marinho (18, 701) por avaliação da uma ou mais funções de transferência para cada combinação de sinal de atuação e saídas do sensor do pelo menos um sensor (708) local para o vibrador marinho (18, 701) e o pelo menos um sensor (703) remoto a partir do vibrador marinho (18, 701) para uma pluralidade de frequências.
5. Sistema, de acordo com a reivindicação 4, caracterizado pelo fato de que a unidade de controle (16) é adicionalmente configurada para determinar o sinal de referência baseado em uma saída acústica de campo distante especificada e a uma ou mais funções de transferência, no qual o sinal de referência inclui valores de referência para sinais de saída do pelo menos um sensor (708) local para o vibrador marinho (18, 701).
6. Sistema, de acordo com a reivindicação 1, caracterizado pelo fato de que o em que o vibrador marinho (18, 701) inclui um atuador (150) configurado para receber o sinal de atuação, em que o atuador inclui um ou mais de: um acionador eletrodinâmico; um acionador magnetostritivo; um acionador piezoelétrico; ou um acionador de motor linear.
7. Sistema, de acordo com a reivindicação 1, caracterizado pelo fato de que o vibrador marinho (18, 701) inclui um ou mais de: vibrador flextensional; um vibrador de dobrador; ou um vibrador de pistão.
8. Método, caracterizado pelo fato de que compreende: medir (920) a saída acústica de um vibrador marinho (18, 701) usando pelo menos um sensor (708) local para o vibrador marinho (18, 701); ajustar (922) um sinal de atuação do vibrador marinho (18, 701) baseado na medição e um sinal de referência, em que o ajuste (922) é ainda baseado em uma ou mais funções de transferência que mapeiam uma saída acústica esperada em campo distante para uma saída acústica local correspondente ao vibrador marítimo (18, 701), em que uma ou mais funções de transferência são determinadas a partir de medições da saída acústica de ambos o pelo menos um sensor (708) local para o vibrador marinho (18, 701) e o pelo menos um sensor (703) remoto do vibrador marinho (18, 701); e repetir (924) a medição e o ajuste até que uma condição limite seja encontrada, no qual a repetição (924) ajusta o sinal de atuação para produzir um sinal de saída de campo distante desejado dentro de uma tolerância de campo especificada.
9. Método, de acordo com a reivindicação 8, caracterizado pelo fato de que o ajuste (924) do sinal de atuação inclui: usar a uma ou mais funções para gerar uma estimativa de saída acústica local para o vibrador marinho (18, 701) baseada na medição da saída acústica por o pelo menos um sensor (703) remoto a partir do vibrador marinho (18, 701); e ajustar o sinal de atuação baseado na estimativa.
10. Método, de acordo com a reivindicação 8, caracterizado pelo fato de que inclui adicionalmente: fazer com que o vibrador marinho (18, 701) gere um sinal de saída selecionado; coletar, através do pelo menos um sensor (708) local para o vibrador marinho (18, 701) e do pelo menos um sensor (703) remoto do vibrador marinho (18, 701), medições do sinal de saída selecionado; e gerar a uma ou mais funções de transferência a partir das medições do sinal de saída selecionado.
11. Método, de acordo com a reivindicação 9, caracterizado pelo fato de que compreende adicionalmente: realizar uma caracterização inicial do vibrador marinho (18, 701) por avaliação da uma ou mais funções de transferência para cada combinação de sinal de atuação e saídas do sensor do pelo menos um sensor (708) local para o vibrador marinho (18, 701), e o pelo menos um sensor (703) remoto a partir do vibrador marinho (18, 701) para uma pluralidade de frequências.
12. Método, de acordo com a reivindicação 11, caracterizado pelo fato de que compreende adicionalmente: determinar o sinal de referência baseado em uma saída acústica de campo distante especificada, e a uma ou mais funçõesde transferência, no qual o sinal de referência inclui valores de referência para sinais de saída do pelo menos um sensor (708) local para o vibrador marinho (18, 701).
13. Método, de acordo com a reivindicação 8, caracterizado pelo fato de que compreende adicionalmente: produzir um produto de dado geofísico baseado na saída acústica medida.
14. Método de acordo com a reivindicação 8, caracterizado pelo fato de que compreende adicionalmente: medir a saída refletida do vibrador marinho (18, 701), via pelo menos um sensor diferente, no qual a saída refletida foi refletida de pelo menos uma formação geofísica (22); e produzir um produto de dado geofísico baseado na saída refletida medida.
15. Método, de acordo com a reivindicação 14, caracterizado pelo fato de que compreende adicionalmente importar o produto de dado geofísico onshore.
16. Vibrador marinho (18, 701), caracterizado pelo fato de que compreende: um elemento vibratório (142, 152); e pelo menos um atuador (150), acoplado ao elemento vibratório (142, 152); no qual o vibrador marinho (18, 701) é configurado para: gerar a saída acústica, via o elemento vibratório (142, 152) e o pelo menos um atuador (150) em resposta a sinais de atuação; receber sinais de atuação de uma unidade de controle (16), no qual os sinais de atuação foram modificados baseado em um sinal de referência, medições da saída acústica por pelo menos um sensor (708) local para o vibrador marinho (18, 701), e uma ou mais funções de transferência que mapeiam uma saída acústica esperada em campo distante para uma saída acústica local correspondente ao vibrador marinho (18, 701), em que uma ou mais funções de transferência são determinadas a partir de medições da saída acústica de ambos o pelo menos um sensor (708) local para o vibrador marinho (18, 701) e o pelo menos um sensor (703) remoto a partir do vibrador marinho (18, 701); gerar a saída acústica modificada baseada nos sinais de atuação modificados; e repetir as etapas de recebimento e geração da saída acústica modificada.
17. Vibrador marinho (18, 701), de acordo com a reivindi-cação 16, caracterizado pelo fato de que os sinais de atuação foram modificados baseados em a uma ou mais funções de transferência, para gerar uma estimativa de saída acústica em campo distante baseado nas medições da saída acústica por o pelo menos um sensor (708) local do vibrador marinho (18, 701).
18. Vibrador marinho (18, 701), de acordo com a reivindi-cação 16, caracterizado pelo fato de que o pelo menos um atuador (150) inclui um ou mais de: um acionador eletrodinâmico; um acionador magnetostritivo; um acionador piezoelétrico; ou um acionador de motor linear.
19. Vibrador marinho (18, 701), de acordo com a reivindi-cação 16, caracterizado pelo fato de que o elemento vibratório (142, 152) inclui um ou mais de: um elemento vibratório flextensional; um elemento vibratório de dobrador; ou um elemento vibratório de pistão.
20. Vibrador marinho (18, 701), de acordo com a reivindi-cação 16, caracterizado pelo fato de que compreende adicionalmente o pelo menos um sensor (708) local para o vibrador marinho (18, 701), no qual o pelo menos um sensor (708) local para o vibrador marinho (18, 701) está dentro ou no vibrador marinho (18, 701).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361921962P | 2013-12-30 | 2013-12-30 | |
| US61/921,962 | 2013-12-30 | ||
| PCT/EP2014/079486 WO2015101644A1 (en) | 2013-12-30 | 2014-12-30 | Method for calibrating the far-field acoustic output of a marine vibrator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016015181A2 BR112016015181A2 (pt) | 2017-08-08 |
| BR112016015181B1 true BR112016015181B1 (pt) | 2022-05-10 |
Family
ID=52278656
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016015182-8A BR112016015182B1 (pt) | 2013-12-30 | 2014-12-30 | Sistema e método de controle para vibradores marinhos que operam próximo de fontes de sinais sísmicos impulsivos |
| BR112016015113-5A BR112016015113B1 (pt) | 2013-12-30 | 2014-12-30 | Sistema e método de controle para vibradores marinhos |
| BR112016015181-0A BR112016015181B1 (pt) | 2013-12-30 | 2014-12-30 | Sistema, método para calibrar a saída acústica de campo distante de um vibrador marinho e vibrador marinho |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016015182-8A BR112016015182B1 (pt) | 2013-12-30 | 2014-12-30 | Sistema e método de controle para vibradores marinhos que operam próximo de fontes de sinais sísmicos impulsivos |
| BR112016015113-5A BR112016015113B1 (pt) | 2013-12-30 | 2014-12-30 | Sistema e método de controle para vibradores marinhos |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US20160327665A1 (pt) |
| EP (4) | EP3090285B1 (pt) |
| AU (4) | AU2014375215B2 (pt) |
| BR (3) | BR112016015182B1 (pt) |
| WO (4) | WO2015101644A1 (pt) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160327665A1 (en) * | 2013-12-30 | 2016-11-10 | Pgs Geophysical As | Control system for marine vibrators |
| US10234585B2 (en) | 2015-12-10 | 2019-03-19 | Pgs Geophysical As | Geophysical survey systems and related methods |
| US10222499B2 (en) | 2016-01-11 | 2019-03-05 | Pgs Geophysical As | System and method of marine geophysical surveys with distributed seismic sources |
| US10451759B2 (en) | 2016-04-15 | 2019-10-22 | Pgs Geophysical As | Control system for a marine vibrator |
| US10436926B2 (en) | 2016-08-17 | 2019-10-08 | Pgs Geophysical As | Marine vibrator source acceleration and pressure |
| US10935682B2 (en) | 2016-10-03 | 2021-03-02 | Schlumberger Technology Corporation | Downhole seismic sensing synchronization systems and methods |
| CN109657262B (zh) * | 2018-10-29 | 2022-10-11 | 中船动力研究院有限公司 | 船舶自由场水下声辐射远场判据方法 |
| US10771892B1 (en) * | 2019-07-02 | 2020-09-08 | Teledyne Instruments, Inc. | Underwater subwoofer system |
| CN111752153B (zh) * | 2020-06-24 | 2021-09-14 | 北京航空航天大学 | 一种基于1.5阶混合重复控制器的谐波电流抑制方法 |
| BR112023021550A2 (pt) * | 2021-04-19 | 2024-01-30 | Reflection Marine Norge As | Sistema e método para a caracterização de um sinal acústico sísmico |
Family Cites Families (134)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2190746A (en) | 1938-04-20 | 1940-02-20 | Gen Aniline & Film Corp | Water soluble naphthol compounds and the process of preparing same |
| US3258738A (en) * | 1963-11-20 | 1966-06-28 | Honeywell Inc | Underwater transducer apparatus |
| US3412374A (en) * | 1967-06-26 | 1968-11-19 | Teledyne Exploration Co | Short period seismic system with long period response |
| FR2060151A1 (pt) * | 1969-09-02 | 1971-06-18 | Inst Francais Du Petrole | |
| US3886493A (en) * | 1973-05-07 | 1975-05-27 | Amoco Prod Co | Adaptive monofrequency pilot signals |
| US3895343A (en) * | 1973-05-07 | 1975-07-15 | Amoco Prod Co | Apparatus for producing adaptive pilot signals |
| US3984805A (en) * | 1973-10-18 | 1976-10-05 | Daniel Silverman | Parallel operation of seismic vibrators without phase control |
| US4049077A (en) * | 1974-10-21 | 1977-09-20 | Exxon Production Research Company | Seismic vibrator control system |
| US4420826A (en) * | 1981-07-06 | 1983-12-13 | Sanders Associates, Inc. | Stress relief for flextensional transducer |
| US4941202A (en) * | 1982-09-13 | 1990-07-10 | Sanders Associates, Inc. | Multiple segment flextensional transducer shell |
| US4633970A (en) * | 1984-01-03 | 1987-01-06 | Exxon Production Research Co. | Distributed marine seismic source |
| US4648080A (en) | 1984-06-15 | 1987-03-03 | Western Geophysical Company | Method for determining the far field signature of a marine seismic source from near-field measurements |
| US4692912A (en) * | 1984-11-30 | 1987-09-08 | Geosource, Inc. | Automatic force control for a seismic vibrator |
| US4715020A (en) * | 1986-10-29 | 1987-12-22 | Western Atlas International, Inc. | Simultaneous performance of multiple seismic vibratory surveys |
| FR2589587B1 (fr) * | 1985-10-30 | 1988-02-05 | Inst Francais Du Petrole | Procede de prospection sismique marine utilisant un signal vibratoire code et dispositif pour sa mise en oeuvre |
| US4823326A (en) * | 1986-07-21 | 1989-04-18 | The Standard Oil Company | Seismic data acquisition technique having superposed signals |
| US4706230A (en) * | 1986-08-29 | 1987-11-10 | Nec Corporation | Underwater low-frequency ultrasonic wave transmitter |
| US4926392A (en) * | 1986-09-22 | 1990-05-15 | Hand Geophysical | Method and apparatus for obtaining seismic vibrator reflection data |
| FR2688112B1 (fr) * | 1988-04-28 | 1996-10-11 | France Etat Armement | Transducteurs electro-acoustiques directifs comportant une coque etanche en deux parties. |
| US4969129A (en) * | 1989-09-20 | 1990-11-06 | Texaco Inc. | Coding seismic sources |
| SE467081B (sv) * | 1990-09-28 | 1992-05-18 | Asea Atom Ab | Drivpaket ingaaende i akustiska saendare |
| US5235554A (en) * | 1991-03-11 | 1993-08-10 | Halliburton Geophysical Services, Inc. | Method for correcting impulse response differences of hydrophones and geophones as well as geophone coupling to the water-bottom in dual-sensor, bottom-cable seismic operations |
| US5128900A (en) | 1991-06-06 | 1992-07-07 | Conoco Inc. | Multi-component seismic vibratory source for use in marine environments |
| SE468967B (sv) * | 1991-08-29 | 1993-04-19 | Asea Atom Ab | Drivsystem foer akustiska aparater baserat paa en magnetkrets med en cylindrisk magnetostriktiv kuts som drivcell |
| US5163028A (en) * | 1991-09-27 | 1992-11-10 | Halliburton Geophysical Services, Inc. | Method for correcting impulse response differences of hydrophones and geophones as well as geophone coupling to the water-bottom in dual-sensor, bottom-cable seismic operations |
| US5126979A (en) * | 1991-10-07 | 1992-06-30 | Westinghouse Electric Corp. | Variable reluctance actuated flextension transducer |
| FR2687227B1 (fr) | 1992-02-06 | 1994-05-20 | Geophysique Cie Generale | Procede pour determiner une signature en champ lointain d'une pluralite de sources sismiques. |
| US5936079A (en) * | 1992-04-06 | 1999-08-10 | Alton Ochsner Medical Foundation | Oligonucleotide which binds to a chromosomal binding site for p53 protein |
| US5375101A (en) * | 1992-08-21 | 1994-12-20 | Westinghouse Electric Corporation | Electromagnetic sonar transmitter apparatus and method utilizing offset frequency drive |
| NO302718B1 (no) * | 1994-05-06 | 1998-04-14 | Unaco Systems Ab | Akustisk sender |
| NO179654C (no) * | 1994-05-06 | 1996-11-20 | Unaco Systems Ab | Akustisk sender med lydavgivende flater innrettet til å settes i vibrasjonsbevegelse |
| NO301796B1 (no) * | 1995-05-18 | 1997-12-08 | Unaco Systems Ab | Drivenhet for akustiske sendere |
| NO301795B1 (no) * | 1995-06-28 | 1997-12-08 | Unaco Systems Ab | Elektrodynamisk drivenhet for akustiske sendere |
| US5721710A (en) * | 1995-09-29 | 1998-02-24 | Atlantic Richfield Company | High fidelity vibratory source seismic method with source separation |
| US5719821A (en) * | 1995-09-29 | 1998-02-17 | Atlantic Richfield Company | Method and apparatus for source separation of seismic vibratory signals |
| US5724306A (en) * | 1995-12-29 | 1998-03-03 | Western Atlas International, Inc. | Method for correcting dual sensor data for imperfect geophone coupling using production seismic data |
| NO961765L (no) * | 1996-04-30 | 1997-10-31 | Unaco Systems Ab | Akustisk sender II |
| NO303472B1 (no) * | 1996-04-30 | 1998-07-13 | Unaco Systems Ab | Akustisk sender |
| GB2328017B (en) * | 1997-08-07 | 2001-11-14 | Geco As | Signature estimation of a seismic source |
| US6035257A (en) * | 1997-12-10 | 2000-03-07 | Pelton Company | Method and apparatus for reducing harmonic distortion |
| AU3730700A (en) * | 1999-03-17 | 2000-10-04 | Input/Output, Inc. | Hydrophone assembly |
| US6188963B1 (en) * | 1999-07-12 | 2001-02-13 | Baker Hughes Incorporated | Method and system for deriving receiver separation and depth dual phone seismic surveys |
| SE514569C2 (sv) * | 1999-08-13 | 2001-03-12 | Cetus Innovation Ab | Drivanordning för hydroakustiska sändare samt användning av anordningen för sändning av hydroakustiska vågor i en vätska |
| GB9920593D0 (en) * | 1999-09-02 | 1999-11-03 | Geco Prakla Uk Ltd | A method of seismic surveying, a marine vibrator arrangement, and a method of calculating the depths of seismic sources |
| US6418079B1 (en) | 1999-09-10 | 2002-07-09 | Westerngeco, L.L.C. | Method of reducing harmonic interference while using overlapping source point seismic recording techniques |
| GB2359363B (en) * | 2000-02-15 | 2002-04-03 | Geco Prakla | Processing simultaneous vibratory seismic data |
| US6536553B1 (en) * | 2000-04-25 | 2003-03-25 | The United States Of America As Represented By The Secretary Of The Army | Method and apparatus using acoustic sensor for sub-surface object detection and visualization |
| US6381544B1 (en) * | 2000-07-19 | 2002-04-30 | Westerngeco, L.L.C. | Deterministic cancellation of air-coupled noise produced by surface seimic sources |
| FR2818753B1 (fr) * | 2000-12-21 | 2003-03-21 | Inst Francais Du Petrole | Methode et dispositif de prospection sismique par emission simultanee de signaux sismisques obtenus en codant un signal par des sequences pseudo aleatoires |
| US6488117B1 (en) * | 2001-08-24 | 2002-12-03 | Thomas E. Owen | Vertical-force vibrator seismic wave source |
| US6851511B2 (en) | 2002-05-31 | 2005-02-08 | Stig Rune Lennart Tenghamn | Drive assembly for acoustic sources |
| GB2394774A (en) * | 2002-10-28 | 2004-05-05 | Abb Offshore Systems Ltd | Microseismic monitoring of hydrocarbon production well including means to reduce fluid flow noise from production tubing |
| US7620193B2 (en) * | 2002-12-20 | 2009-11-17 | Newlands Technology Limited | Acoustic actuators |
| US7058184B1 (en) * | 2003-03-25 | 2006-06-06 | Robert Hickling | Acoustic measurement method and apparatus |
| GB2404736B (en) * | 2003-08-01 | 2006-01-04 | Westerngeco Seismic Holdings | Determination of geophone coupling |
| US20060164916A1 (en) * | 2003-08-11 | 2006-07-27 | Krohn Christine E | Method for continuous sweepting and separtion of multiple seismic vibrators |
| US7218572B2 (en) | 2004-05-20 | 2007-05-15 | Pgs Exploration (Uk) Limited | Method of seismic source monitoring using modeled source signatures with calibration functions |
| GB2416033B (en) | 2004-07-10 | 2006-11-01 | Westerngeco Ltd | Seismic vibratory acquisition method and apparatus |
| US7167412B2 (en) * | 2004-12-17 | 2007-01-23 | Pgs Americas, Inc. | Apparatus for steering a marine seismic streamer via controlled bending |
| EP1903840A4 (en) * | 2005-07-15 | 2013-05-01 | Panasonic Corp | CONDUCTOR PLATE, WELDING MATERIAL, COPPER-COATED LAMINATE AND MANUFACTURING PROCESS FOR A PCB |
| US7376045B2 (en) * | 2005-10-21 | 2008-05-20 | Pgs Geophysical As | System and method for determining positions of towed marine seismic streamers |
| US7327633B2 (en) * | 2005-12-12 | 2008-02-05 | Westerneco L.L.C. | Systems and methods for enhancing low-frequency content in vibroseis acquisition |
| US7466625B2 (en) * | 2006-06-23 | 2008-12-16 | Westerngeco L.L.C. | Noise estimation in a vector sensing streamer |
| GB2447236B (en) * | 2007-03-09 | 2010-02-24 | Westerngeco Seismic Holdings | Method of estimating harmonic noise within slip-sweep Vibroseis signals |
| US7676327B2 (en) * | 2007-04-26 | 2010-03-09 | Westerngeco L.L.C. | Method for optimal wave field separation |
| US7859945B2 (en) * | 2007-07-06 | 2010-12-28 | Cggveritas Services Inc. | Efficient seismic data acquisition with source separation |
| US20110242933A1 (en) * | 2007-10-19 | 2011-10-06 | Francis Maissant | Determining a characteristic of a seismic sensing module using a processor in the seismic sensing module |
| US8139440B2 (en) * | 2007-12-27 | 2012-03-20 | Westerngeco L.L.C. | Spectral conditioning for surface seismic data |
| US7551518B1 (en) * | 2008-02-26 | 2009-06-23 | Pgs Geophysical As | Driving means for acoustic marine vibrator |
| US20090245019A1 (en) * | 2008-03-31 | 2009-10-01 | Jon Falkenberg | Method and system for determining geodetic positions of towed marine sensor array components |
| US7881158B2 (en) * | 2008-06-30 | 2011-02-01 | Pgs Geophysical As | Seismic vibrator having multiple resonant frequencies in the seismic frequency band using multiple spring and mass arrangements to reduce required reactive mass |
| WO2010019314A1 (en) * | 2008-08-11 | 2010-02-18 | Exxonmobil Upstream Research Company | Removal of surface-wave noise in seismic data |
| US8467267B2 (en) * | 2008-10-29 | 2013-06-18 | Conocophillips Company | Asynchronous operation of seismic sources in a seismic survey |
| US8094514B2 (en) * | 2008-11-07 | 2012-01-10 | Pgs Geophysical As | Seismic vibrator array and method for using |
| US20100118647A1 (en) * | 2008-11-07 | 2010-05-13 | Pgs Geophysical As | Method for optimizing energy output of from a seismic vibrator array |
| GB2479299B (en) * | 2009-03-27 | 2011-11-16 | Geco Technology Bv | Processing seismic data |
| US7974152B2 (en) * | 2009-06-23 | 2011-07-05 | Pgs Geophysical As | Control system for marine vibrators and seismic acquisition system using such control system |
| US8335127B2 (en) * | 2009-08-12 | 2012-12-18 | Pgs Geophysical As | Method for generating spread spectrum driver signals for a seismic vibrator array using multiple biphase modulation operations in each driver signal chip |
| US20110075514A1 (en) * | 2009-09-29 | 2011-03-31 | Schlumberger Technology Corporation | Apparatus and methods for attenuating seismic noise associated with atmospheric pressure fluctuations |
| US8427901B2 (en) | 2009-12-21 | 2013-04-23 | Pgs Geophysical As | Combined impulsive and non-impulsive seismic sources |
| US8520467B2 (en) * | 2010-03-09 | 2013-08-27 | Westerngeco L.L.C. | Using seismic sensor transfer functions for high fidelity seismic imaging |
| CN103250072B (zh) * | 2010-04-27 | 2017-02-22 | 哈里伯顿能源服务公司 | 通过使用钻头地震对断裂的干涉测量钻头成像、时间反演成像来进行断裂表征、和经由时间反演的声学和电震对断裂产生的监测 |
| US8446798B2 (en) | 2010-06-29 | 2013-05-21 | Pgs Geophysical As | Marine acoustic vibrator having enhanced low-frequency amplitude |
| CA2809098A1 (en) * | 2010-08-10 | 2012-02-16 | Conocophillips Company | Method for creating an improved sweep for a seismic source |
| CA2813782A1 (en) * | 2010-10-14 | 2012-04-19 | Inova Ltd. | Seismic data filtering based on vibrator-coupled ground model |
| CN102812715B (zh) * | 2011-01-27 | 2015-08-19 | 松下电器产业株式会社 | 三维图像摄影装置以及三维图像拍摄方法 |
| US9188691B2 (en) * | 2011-07-05 | 2015-11-17 | Pgs Geophysical As | Towing methods and systems for geophysical surveys |
| US8670292B2 (en) * | 2011-08-12 | 2014-03-11 | Pgs Geophysical As | Electromagnetic linear actuators for marine acoustic vibratory sources |
| US9535179B2 (en) | 2011-08-24 | 2017-01-03 | Stephen Chelminski | Marine vibratory sound source for beneath water seismic exploration |
| US8570835B2 (en) | 2011-08-24 | 2013-10-29 | Stephen Chelminski | Marine vibratory sound source for beneath water seismic exploration |
| FR2981746B1 (fr) | 2011-10-19 | 2014-11-21 | Cggveritas Services Sa | Source et procede d'acquisition sismique marine |
| FR2981758B1 (fr) * | 2011-10-19 | 2013-12-06 | Cggveritas Services Sa | . |
| FR2981759B1 (fr) * | 2011-10-19 | 2014-07-18 | Cggveritas Services Sa | Procede et dispositif pour determiner un signal de commande pour des sources marines vibrosismiques |
| US8773950B2 (en) * | 2011-12-27 | 2014-07-08 | Cggveritas Services Sa | Method and seismic sources with high productivity |
| US20130201793A1 (en) * | 2012-01-13 | 2013-08-08 | Spencer Lewis Rowse | Vibrator source system for improved seismic imaging |
| AU2013243438A1 (en) * | 2012-04-04 | 2014-11-06 | Inova Ltd. | Devices and systems for controlling harmonic distortion in seismic sources |
| US9562982B1 (en) * | 2012-08-13 | 2017-02-07 | Applied Physical Sciences Corp. | Coherent sound source for marine seismic surveys |
| WO2014028293A1 (en) | 2012-08-13 | 2014-02-20 | Applied Physical Sciences Corp. | Coherent sound source for marine seismic surveys |
| US9429669B2 (en) * | 2012-10-19 | 2016-08-30 | Cgg Services Sa | Seismic source and method for single sweep intermodulation mitigation |
| US8724428B1 (en) * | 2012-11-15 | 2014-05-13 | Cggveritas Services Sa | Process for separating data recorded during a continuous data acquisition seismic survey |
| US8619497B1 (en) * | 2012-11-15 | 2013-12-31 | Cggveritas Services Sa | Device and method for continuous data acquisition |
| US9244184B2 (en) * | 2012-12-28 | 2016-01-26 | Pgs Geophysical As | Rigid-stem lead-in method and system |
| US9423520B2 (en) * | 2012-12-28 | 2016-08-23 | Pgs Geophysical As | Rigid protracted geophysical equipment comprising control surfaces |
| US9684088B2 (en) * | 2012-12-28 | 2017-06-20 | Pgs Geophysical As | Rigid-stem active method and system |
| US9250343B2 (en) * | 2012-12-28 | 2016-02-02 | Pgs Geophysical As | Rigid-stem survey method and system |
| US9321630B2 (en) * | 2013-02-20 | 2016-04-26 | Pgs Geophysical As | Sensor with vacuum-sealed cavity |
| US9322945B2 (en) * | 2013-03-06 | 2016-04-26 | Pgs Geophysical As | System and method for seismic surveying using distributed sources |
| US9753168B2 (en) * | 2013-03-08 | 2017-09-05 | Pgs Geophysical As | Marine streamer having variable stiffness |
| US20140260617A1 (en) * | 2013-03-14 | 2014-09-18 | Agency For Science Technology And Research (A*Star) | Fully differential capacitive architecture for mems accelerometer |
| US20140260618A1 (en) * | 2013-03-14 | 2014-09-18 | Agency For Science Technology And Research (A*Star) | Force feedback electrodes in mems accelerometer |
| US9217797B2 (en) | 2013-04-11 | 2015-12-22 | Schlumberger Technology Corporation | High-speed image monitoring of baseplate movement in a vibrator |
| US9645264B2 (en) * | 2013-05-07 | 2017-05-09 | Pgs Geophysical As | Pressure-compensated sources |
| US9995834B2 (en) * | 2013-05-07 | 2018-06-12 | Pgs Geophysical As | Variable mass load marine vibrator |
| US9864080B2 (en) * | 2013-05-15 | 2018-01-09 | Pgs Geophysical As | Gas spring compensation marine acoustic vibrator |
| WO2014195467A2 (en) * | 2013-06-07 | 2014-12-11 | Cgg Services Sa | Method and system for simultaneous acquisition of pressure and pressure derivative data with ghost diversity |
| MX2016001025A (es) * | 2013-07-23 | 2016-10-05 | Cgg Services Sa | Metodo para la designacion de datos sismicos adquiridos utilizando una fuente en movimiento. |
| US9508915B2 (en) * | 2013-09-03 | 2016-11-29 | Pgs Geophysical As | Piezoelectric bender with additional constructive resonance |
| US9341725B2 (en) * | 2013-09-20 | 2016-05-17 | Pgs Geophysical As | Piston integrated variable mass load |
| US9507037B2 (en) * | 2013-09-20 | 2016-11-29 | Pgs Geophysical As | Air-spring compensation in a piston-type marine vibrator |
| US9618637B2 (en) * | 2013-09-20 | 2017-04-11 | Pgs Geophysical As | Low frequency marine acoustic vibrator |
| US9360574B2 (en) * | 2013-09-20 | 2016-06-07 | Pgs Geophysical As | Piston-type marine vibrators comprising a compliance chamber |
| US9775336B2 (en) * | 2013-12-06 | 2017-10-03 | Airmar Technology Corporation | Acoustic projector with source level monitoring and control |
| US20160327665A1 (en) * | 2013-12-30 | 2016-11-10 | Pgs Geophysical As | Control system for marine vibrators |
| WO2015110912A2 (en) * | 2014-01-21 | 2015-07-30 | Cgg Services Sa | Method and system with low-frequency seismic source |
| US10317543B2 (en) * | 2014-04-14 | 2019-06-11 | Pgs Geophysical As | Estimation of a far field signature in a second direction from a far field signature in a first direction |
| US20150308864A1 (en) * | 2014-04-24 | 2015-10-29 | Björn N. P. Paulsson | Vector Sensor for Seismic Application |
| JP6347480B2 (ja) * | 2014-05-27 | 2018-06-27 | 独立行政法人石油天然ガス・金属鉱物資源機構 | 振動検出システム、信号処理装置及び信号処理方法 |
| US9612347B2 (en) * | 2014-08-14 | 2017-04-04 | Pgs Geophysical As | Compliance chambers for marine vibrators |
| US9568640B2 (en) * | 2014-09-15 | 2017-02-14 | Baker Hughes Incorporated | Displacement measurements using simulated multi-wavelength light sources |
| US9389327B2 (en) * | 2014-10-15 | 2016-07-12 | Pgs Geophysical As | Compliance chambers for marine vibrators |
| EP3310999A4 (en) * | 2015-09-17 | 2018-07-18 | Halliburton Energy Services, Inc. | Using an adjusted drive pulse in formation evaluation |
| US10401511B2 (en) * | 2016-03-25 | 2019-09-03 | Teledyne Instruments, Inc. | Dual resonant single aperture seismic source |
| US10451759B2 (en) * | 2016-04-15 | 2019-10-22 | Pgs Geophysical As | Control system for a marine vibrator |
| US20180128927A1 (en) * | 2016-10-19 | 2018-05-10 | Pgs Geophysical As | Coded Signals for Marine Vibrators |
-
2014
- 2014-12-30 US US15/109,107 patent/US20160327665A1/en not_active Abandoned
- 2014-12-30 US US15/109,113 patent/US10627540B2/en active Active
- 2014-12-30 BR BR112016015182-8A patent/BR112016015182B1/pt active IP Right Grant
- 2014-12-30 US US15/109,111 patent/US10436938B2/en not_active Expired - Fee Related
- 2014-12-30 EP EP14824857.8A patent/EP3090285B1/en not_active Not-in-force
- 2014-12-30 AU AU2014375215A patent/AU2014375215B2/en active Active
- 2014-12-30 WO PCT/EP2014/079486 patent/WO2015101644A1/en active Application Filing
- 2014-12-30 AU AU2014375214A patent/AU2014375214B2/en active Active
- 2014-12-30 BR BR112016015113-5A patent/BR112016015113B1/pt active IP Right Grant
- 2014-12-30 BR BR112016015181-0A patent/BR112016015181B1/pt active IP Right Grant
- 2014-12-30 WO PCT/EP2014/079484 patent/WO2015101643A1/en active Application Filing
- 2014-12-30 WO PCT/EP2014/079487 patent/WO2015101645A1/en active Application Filing
- 2014-12-30 US US15/109,234 patent/US11125911B2/en active Active
- 2014-12-30 EP EP14824029.4A patent/EP3090284B1/en active Active
- 2014-12-30 AU AU2014375216A patent/AU2014375216B2/en active Active
- 2014-12-30 WO PCT/EP2014/079485 patent/WO2015104210A1/en active Application Filing
- 2014-12-30 EP EP14830399.3A patent/EP3090286B1/en active Active
- 2014-12-30 EP EP14821677.3A patent/EP3090283B1/en active Active
- 2014-12-30 AU AU2014376981A patent/AU2014376981B2/en not_active Ceased
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016015181B1 (pt) | Sistema, método para calibrar a saída acústica de campo distante de um vibrador marinho e vibrador marinho | |
| US7974152B2 (en) | Control system for marine vibrators and seismic acquisition system using such control system | |
| US9618641B2 (en) | Method and device for determining a driving signal for vibroseis marine sources | |
| Sörnmo et al. | Frequency-domain iterative learning control of a marine vibrator | |
| US10481286B2 (en) | Marine seismic vibrator for low frequency and methods of use | |
| DK201570640A1 (en) | Seismic sensor devices, systems, and methods including noise filtering | |
| EP3232231B1 (en) | Control system for a marine vibrator | |
| CA2914067A1 (en) | Operational control in a seismic source | |
| CN117751308A (zh) | 用于表征地震声信号的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 30/12/2014, OBSERVADAS AS CONDICOES LEGAIS |