BR112014024293B1 - Acionador mecânico e bomba - Google Patents
Acionador mecânico e bomba Download PDFInfo
- Publication number
- BR112014024293B1 BR112014024293B1 BR112014024293-3A BR112014024293A BR112014024293B1 BR 112014024293 B1 BR112014024293 B1 BR 112014024293B1 BR 112014024293 A BR112014024293 A BR 112014024293A BR 112014024293 B1 BR112014024293 B1 BR 112014024293B1
- Authority
- BR
- Brazil
- Prior art keywords
- wedge
- mechanical actuator
- lever
- shaped member
- piston
- Prior art date
Links
- 229910001285 shape-memory alloy Inorganic materials 0.000 claims abstract description 94
- 238000005086 pumping Methods 0.000 claims description 36
- 239000013536 elastomeric material Substances 0.000 claims description 17
- 238000001746 injection moulding Methods 0.000 claims description 17
- 238000000034 method Methods 0.000 claims description 17
- 239000007788 liquid Substances 0.000 claims description 11
- 238000005266 casting Methods 0.000 claims description 9
- 238000001802 infusion Methods 0.000 claims description 6
- 239000012528 membrane Substances 0.000 claims description 3
- 230000001225 therapeutic effect Effects 0.000 claims description 3
- 241000270728 Alligator Species 0.000 claims 1
- 238000006073 displacement reaction Methods 0.000 abstract description 17
- 230000004913 activation Effects 0.000 abstract 1
- 238000004519 manufacturing process Methods 0.000 description 28
- 239000000463 material Substances 0.000 description 23
- 229920001296 polysiloxane Polymers 0.000 description 15
- 239000012530 fluid Substances 0.000 description 14
- 230000009471 action Effects 0.000 description 8
- 239000003814 drug Substances 0.000 description 8
- 229940079593 drug Drugs 0.000 description 8
- 238000013461 design Methods 0.000 description 7
- 239000000853 adhesive Substances 0.000 description 6
- 238000012377 drug delivery Methods 0.000 description 6
- 238000002360 preparation method Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 239000000956 alloy Substances 0.000 description 4
- 239000003795 chemical substances by application Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 238000000465 moulding Methods 0.000 description 4
- 229920000642 polymer Polymers 0.000 description 4
- 229920004482 WACKER® Polymers 0.000 description 3
- 229910045601 alloy Inorganic materials 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- 238000011065 in-situ storage Methods 0.000 description 3
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 239000004696 Poly ether ether ketone Substances 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 238000002788 crimping Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 229910001000 nickel titanium Inorganic materials 0.000 description 2
- 229920002530 polyetherether ketone Polymers 0.000 description 2
- 238000005476 soldering Methods 0.000 description 2
- 229920006060 Grivory® Polymers 0.000 description 1
- 229920000147 Styrene maleic anhydride Polymers 0.000 description 1
- HZEWFHLRYVTOIW-UHFFFAOYSA-N [Ti].[Ni] Chemical compound [Ti].[Ni] HZEWFHLRYVTOIW-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000975 bioactive effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000003446 memory effect Effects 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000001537 neural effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920000058 polyacrylate Polymers 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B19/00—Machines or pumps having pertinent characteristics not provided for in, or of interest apart from, groups F04B1/00 - F04B17/00
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14212—Pumping with an aspiration and an expulsion action
- A61M5/14216—Reciprocating piston type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
- A61M5/1452—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons pressurised by means of pistons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
- A61M5/1452—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons pressurised by means of pistons
- A61M5/1454—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons pressurised by means of pistons spring-actuated, e.g. by a clockwork
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/06—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for using expansion or contraction of bodies due to heating, cooling, moistening, drying or the like
- F03G7/065—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for using expansion or contraction of bodies due to heating, cooling, moistening, drying or the like using a shape memory element
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B19/00—Machines or pumps having pertinent characteristics not provided for in, or of interest apart from, groups F04B1/00 - F04B17/00
- F04B19/006—Micropumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B43/00—Machines, pumps, or pumping installations having flexible working members
- F04B43/02—Machines, pumps, or pumping installations having flexible working members having plate-like flexible members, e.g. diaphragms
- F04B43/04—Pumps having electric drive
- F04B43/043—Micropumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B9/00—Piston machines or pumps characterised by the driving or driven means to or from their working members
- F04B9/02—Piston machines or pumps characterised by the driving or driven means to or from their working members the means being mechanical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
- A61M2005/14506—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons mechanically driven, e.g. spring or clockwork
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/02—General characteristics of the apparatus characterised by a particular materials
- A61M2205/0244—Micromachined materials, e.g. made from silicon wafers, microelectromechanical systems [MEMS] or comprising nanotechnology
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/02—General characteristics of the apparatus characterised by a particular materials
- A61M2205/0266—Shape memory materials
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2207/00—Methods of manufacture, assembly or production
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Hematology (AREA)
- Vascular Medicine (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Anesthesiology (AREA)
- Heart & Thoracic Surgery (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- Reciprocating Pumps (AREA)
- Micromachines (AREA)
- Clamps And Clips (AREA)
- Transmission Devices (AREA)
- Actuator (AREA)
- Pistons, Piston Rings, And Cylinders (AREA)
- Fluid-Damping Devices (AREA)
Abstract
acionador mecânico e bomba. a presente invenção refere-se a um acionador mecânico compreendendo um membro em forma de cunha operativamente acoplado a uma liga de memória de forma de modo que a liga de memória de forma seja capaz de deslocar o membro em forma de cunha numa direção essencialmente linear. o membro em forma de cunha está em contato constante com uma alavanca disposta de modo que esta possa girar ao redor dum ponto de articulação fixo. um pistão está disposto de modo que este está em contato constante com a alavanca num ponto entre o ponto de articulação da alavanca e o ponto de contato entre a alavanca e membro em forma de cunha. molas de retorno estão providas para retornar o pistão, a alavanca e membro em forma de cunha para as suas respectivas posições de partida. a ativação da liga de memória de forma desloca o membro em forma de cunha ao longo de sua direção linear e isto faz com que a alavanca seja defletida ao redor de seu ponto de articulação e o pistão seja defletido numa direção essencialmente linear que é perpendicular à direção linear de deslocamento do membro em forma de cunha. a invenção também trata de uma bomba que compreende o acionador mecânico.
Description
[001] A presente invenção refere-se a um acionador mecânico, o dito acionador mecânico pode ser um acionador mecânico em miniatura e é frequentemente utilizado em uma microbomba. A microbomba pode ser utilizada como o dispositivo de bombeamento de fluido de um sistema de fornecimento de droga.
[002] Uma variedade de acionadores mecânicos foi descrita para prover o deslocamento mecânico requerido em dispositivos projetados para bombear fluidos. Exemplos destes acionadores mecânicos incluem dispositivos que operam em princípios de acionamento mecânico termopneumático (US4265600 e US6520753), eletrostático (US6168395 e US5362213), piezoelétrico (US4596575 e US6827559), termohidráulico (GB2443261), bimetálico (US5611676), motores de passo (EP2072072) e magnéticos (US3819305 e US7922462).
[003] Um número de limitações existe com estes princípios de acionamento mecânico quando incorporados em projetos de microbomba. Um número destes acionadores mecânicos são muito complexos e levam a dificuldades quando projetando um produto onde grandes números precisam ser fabricados, que são fabricados em alta produção e onde o processo de fabricação é requerido fornecer um produto a um preço econômico. A complexidade também limita as oportunidades de projeto quando estes estão incorporados em microbombas. Outras limitações são que os componentes requeridos em alguns dos acionadores mecânicos acima descritos resultam em um produto que é muito dispendioso ou difícil de fabricar. Ainda outra limitação é que os materiais requeridos quando incorporando pelo menos alguns dos acionadores mecânicos acima mencionados em produtos de microbomba reduzem as oportunidades de utilizar o produto. Como um exemplo, alguns materiais não são compatíveis com o meio de fluido que o produto é requerido bombear, porque este degrada os componentes comercialmente importantes no meio. Isto poderia incluir componentes comercialmente importantes tais como os materiais bioativos. Em ainda outros casos, alguns dos princípios de acionamento mecânico não são capazes de prover a precisão requerida para as microbombas requeridas para o fornecimento de drogas e outros componentes comercialmente importantes. E ainda outra limitação é que alguns dos princípios de acionamento mecânico acima não são capazes de prover a repetitividade requerida por certos produtos de fornecimento de drogas. Como um exemplo, produtos projetados para utilização de curto prazo e que são substituídos em uma base frequente requerem princípios de acionamento que possam prover um desempenho repetível através de um grande número de dispositivos similares. E ainda outra limitação é que alguns dos princípios de acionamento mecânico acima não proveem a potência requerida pelo dispositivo de fornecimento de droga quando o acionador mecânico é miniaturizado.
[004] Uma liga de memória de forma (SMA) foi proposta como um material adequado para um acionador mecânico do tipo acima descrito e um número de dispositivos baseados neste acionador mecânico foi descrito. Os acionadores mecânicos de SMA podem ser adequados para as aplicações de microbomba devido à sua alta razão de força para peso, simplicidade mecânica, compacidade, e operação silenciosa, limpa. Os acionadores mecânicos de SMA também proveem soluções econômicas para o projeto de utilização de curto prazo, produtos descartáveis que são fáceis de fabricar, que são produzidos em números muito grandes e a um preço econômico.
[005] No entanto, os acionadores mecânicos de SMA têm desvantagens que limitam a sua utilização em aplicações que requerem alta precisão.
[006] Uma desvantagem de utilizar SMA nestes dispositivos é que este tem uma histerese de tensão proeminente e a sua transição de fase é dependente de temperatura, tensão, a direção de movimento, e muitos outros fatores. (J.D. Harrison, "Measurable Change Concomitant with SME Transformation", Engineering Aspects of SMAs, eds. Duering et al., Butterworth, pp 106-209, 1990).
[007] Propostas de controle não linear têm sido utilizadas para compensar a não mecânica de ligas de memória de forma. Estas propostas incluíram várias propostas para controlar o movimento mecânico de ligas de memória de forma tal como: redes neurais e controlador robusto baseado em modo deslizante (Song, "Precision tracking control of shape memory alloy actuators using neural networks and a sliding-mode based robust controller", Smart Mater. Struct. 12, pp. 223-231, 2003), fuzzy neural (Kumagai, "Neuro-fuzzy model based feedback controller for shape memory alloy actuators," Proceedings of SPIE, v 3984, pp. 291-9, 2000) dissipabilidade (Gorbet, "Dissipativity approach to stability of a shape memory alloy position control system", IEEE Transactions on Control Systems Technology, v 6, n 4, pp. 554562, July 1998), controle de estrutura variável (Grant, "Variable structure control of shape memory alloy actuators", IEEE Control Systems Magazine, v 17, n 3, pp. 80-88, June 1997), e modulação de largura de pulso da energia de atuação (NMa and G Song, "Control of shape memory alloy actuator using pulse width modulation", Smart Mater. Struct. 12, pp. 712-719, 2003). Apesar destas propostas frequentemente complexas para o controle de liga de memória de forma, o controle de SMA é ainda difícil.
[008] Diversas propostas foram também propostas para gerar a precisão de movimento requerida para os acionadores mecânicos de SMA limitando mecanicamente a faixa de movimento que a SMA pode executar. A EP2290238A1 descreve um dispositivo que limita a faixa de movimento de um êmbolo em um dispositivo de fornecimento de fluido provendo batentes mecânicos tanto para o início quanto para o final do deslocamento de êmbolo. A US7232423 descreve um dispositivo que também utiliza batentes mecânicos para precisamente definir a faixa de movimento criada pelo acionador mecânico de SMA. Uma limitação destas invenções é que estes batentes mecânicos inserem uma tensão sobre a SMA e limitam o desempenho do acionador e poderiam também levar a uma falha. A US8047812 descreve um dispositivo que objetiva reduzir o efeito de tensão indesejada sobre a SMA introduzindo um segundo pistão acoplado no elemento de memória de forma que move para acomodar as mudanças no elemento de memória de forma e reduzir a tensão sobre o sistema de bombeamento. Introduzindo o segundo pistão, esta invenção aumenta a complexidade do dispositivo, tornando-o mais difícil de fabricar e menos econômico. A US8029245 descreve um dispositivo que se baseia no monitoramento da posição do pistão no sistema de bombeamento e então modulando a energia suprida para a SMA para prover a precisão requerida. O requisito para monitorar a posição do êmbolo nesta invenção introduz a necessidade de um sensor complexo e sistemas de controle que complicam o projeto e a operação do dispositivo. Estas complicações adicionais também aumentam o custo e a complexidade de fabricação do dispositivo. A US6656158 descreve um dispositivo de aplicação de fluido que utiliza uma SMA para mover uma garra contra um sistema de engrenagem dentada preso na porção de aplicação de fluido do dispositivo. Cada vez que a SMA é ativada a garra move contra a engrenagem e indexa a engrenagem de sua primeira posição para uma segunda posição. A engrenagem não retorna para a sua primeira posição. Este dispositivo supera a falta de precisão na utilização de SMA, utilizando a SMA para mover um sistema de engrenagens precisamente formado. A US6375638 descreve um dispositivo que é similar àquele descrito na US6656158. A US6375638 descreve um dispositivo onde a SMA é utilizada para mover uma parte que então deflete uma segunda parte de sua primeira posição para uma segunda posição. A parte que é movida pode ou mover em um movimento linear ou um movimento angular. É importante notar, que esta parte não retorna para a sua primeira posição, mas indexa ao longo do percurso de deslocamento cada vez que a SMA é ativada. Tanto na US6656158 quanto na US6375638, a complexidade do dispositivo descrito aumenta a complexidade do processo de fabricação e a eficiência de custo do dispositivo fabricado.
[009] Existe uma necessidade para um acionador mecânico de atuador de memória de forma que provenha a requerida precisão, confiabilidade, facilidade de fabricação, eficiência de custo e que seja escalável e que possa ser utilizado para acionar o pistão alternante em uma microbomba. Estes ficarão aparentes na descrição da presente invenção.
[0010] A invenção refere-se a um acionador mecânico que compreende uma alavanca a qual é rotativa em um ponto de rotação fixo, um membro em forma de cunha operativamente acoplado na e em contato constante com a alavanca em um ponto a uma distância do ponto de rotação fixo para defletir a alavanca ao redor do ponto de rotação fixo, uma liga de memória de forma operativamente acoplada no membro em forma de cunha para mover o membro em forma de cunha de modo que o membro em forma de cunha defleta a alavanca, em que a liga de memória de forma é mantida em uma tensão predeterminada na sua posição de partida, e um ponto de acionamento de pistão localizado sobre e em contato constante com a alavanca, a uma distância do ponto de rotação fixo da alavanca. Modalidades adicionais do dito acionador mecânico estão definidas nas reivindicações 2-27. O acionador mecânico pode ser um acionador mecânico em miniatura.
[0011] A invenção ainda refere-se a um acionador mecânico que compreende um pistão, um membro em forma de cunha operativamente acoplado e em contato constante com o pistão para defletir o pistão, e uma liga de memória de forma operativamente acoplada no membro em forma de cunha para mover o membro em forma de cunha de modo que o membro em forma de cunha defleta o pistão, em que a liga de memória de forma é mantida em uma tensão predeterminada na sua posição de partida. Modalidades adicionais do dito acionador mecânico estão definidas nas reivindicações 29-46. O acionador mecânico pode ser um acionador mecânico em miniatura.
[0012] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção a liga de memória de forma está disposta para mover o membro em forma de cunha em uma direção linear de uma primeira posição para uma segunda posição.
[0013] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o pistão e o membro em forma de cunha estão dispostos de modo que quando o membro em forma de cunha move de sua primeira posição para a sua segunda posição, o pistão é deslocado ao longo de uma direção linear de uma primeira posição para uma segunda posição.
[0014] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, a direção de movimento do pistão é perpendicular à direção de movimento do membro em forma de cunha. O projeto do acionador mecânico permite mover precisamente um pistão dentro de uma microbomba.
[0015] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o membro em forma de cunha tem uma superfície inclinada que está em contato com o pistão e que atua para deslocar o pistão quando o membro em forma de cunha move ao longo de sua direção linear. A superfície inclinada do membro em forma de cunha forma um ângulo com a direção linear de deslocamento do membro em forma de cunha. O ângulo pode ser otimizado para otimizar o deslocamento do pistão. Será aparente para aqueles versados na técnica que o ângulo da superfície e a distância que o membro em forma de cunha move ao longo de sua direção linear definem a distância que o pistão é deslocado de sua primeira posição para a sua segunda posição. O ângulo que a superfície inclinada do membro em forma de cunha faz com a direção linear de deslocamento do membro em forma de cunha e o comprimento da superfície inclinada podem ambos ser definidos pelas dimensões físicas do membro em forma de cunha. A vantagem desta modalidade da presente invenção é que a forma do membro em forma de cunha determina a extensão e a precisão de deslocamento do pistão. A superfície inclinada do membro em forma de cunha pode ser adicionalmente modificada para incorporar superfícies que são essencialmente planas à direção de deslocamento do membro em forma de cunha. Uma superfície pode ser adicionada à borda dianteira do membro em forma de cunha e diretamente precedente à superfície inclinada. A outra superfície plana pode ser adicionada diretamente após a superfície inclinada. As duas superfícies planas e a superfície inclinada podem ser dispostas de modo que estas formem uma superfície contínua. O membro em forma de cunha pode estar disposto de modo que quando este está na sua primeira posição uma extremidade do pistão está em contato com a primeira superfície plana. Quando o membro em forma de cunha é deslocado ao longo de sua direção de deslocamento linear a extremidade do pistão se desloca ao longo da superfície inclinada e é deslocada de sua primeira posição para a sua segunda posição. A extensão na qual o pistão é deslocado pode ser definida pelo ângulo da superfície inclinada e o comprimento da superfície inclinada. Uma vez que o pistão atinge a segunda superfície plana no final da superfície inclinada este não pode ser adicionalmente deslocado. A vantagem da presente invenção é que o deslocamento do pistão pelo membro em forma de cunha não é determinada pela distância que o membro em forma de cunha se desloca ao longo de sua direção de deslocamento linear desde que a primeira posição do membro em forma de cunha permita o pistão pelo menos contatar uma porção da primeira superfície plana e a segunda posição do membro em forma de cunha permite o pistão contatar pelo menos uma porção da segunda superfície plana. Será aparente para aqueles versados na técnica que a forma do membro em forma de cunha pode ser incorporada em outras modalidades do acionador mecânico de acordo com a presente invenção. A configuração acima está explicada em relação ao acionador mecânico em que o pistão está em contato com o membro em forma de cunha. Será claro que esta pode ser aplicada em um modo similar no acionador mecânico em que uma alavanca está em contato com o membro em forma de cunha.
[0016] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, a alavanca compreende uma extremidade que forma o ponto de rotação fixo e uma extremidade móvel que é móvel ao redor do ponto de rotação fixo. A extremidade móvel da alavanca está disposta de modo que esta esteja em contato permanente com o membro em forma de cunha em que o membro em forma de cunha seja capaz de deslizar em relação à extremidade móvel da alavanca. Está provido um ponto sobre a alavanca, a uma distância ao longo da alavanca entre o ponto de rotação fixo da alavanca e o ponto de contato da alavanca com o membro em forma de cunha, onde a alavanca está em contato permanente com um pistão. O pistão está disposto de modo que este possa mover em uma direção linear que é tão próxima quanto praticamente possível ao longo de uma tangente ao movimento angular da alavanca. Quando o membro em forma de cunha move da primeira posição para a segunda posição este atua para defletir a extremidade móvel da alavanca de uma primeira posição para uma segunda posição. Quando a alavanca é defletida para a sua segunda posição pelo membro em forma de cunha, a alavanca deflete o pistão de uma primeira posição para uma segunda posição. Quando a liga de memória de forma esfria, uma mola de retorno pode puxar o membro em forma de cunha de sua segunda posição para a sua primeira posição, a alavanca gira de sua segunda posição para a sua primeira posição, e o pistão move de sua segunda posição para a sua primeira posição. O acionador mecânico permite que a precisão e a repetibilidade de movimento do pistão de sua primeira posição para a sua segunda posição seja otimizada precisamente definindo o membro em forma de cunha e também otimizando a posição do pistão ao longo da alavanca em relação ao ponto de rotação fixo da alavanca e ao ponto de contato entre a alavanca e o membro em forma de cunha. A posição sobre a alavanca que provê o ponto de contato com o pistão em relação à posição do ponto de rotação fixo e o ponto de contato entre a alavanca e o membro em forma de cunha pode ser otimizada para fornecer o movimento de pistão e a precisão requerida.
[0017] As tecnologias de fabricação correntes tal como moldagem de injeção de peças de polímero pode produzir peças plásticas dentro de uma tolerância de fabricação de aproximadamente +/- 20 mícrons. Em alguns casos, +/- 10 mícrons são possíveis. É, portanto, possível utilizar técnicas de moldagem de injeção correntes para definir o membro em forma de cunha desta invenção para estas precisões. Em certas circunstâncias isto provê uma precisão de movimento de pistão suficiente que é adequada para a fabricação de microbombas que podem ser utilizadas em um dispositivo de fornecimento de drogas capaz de um fornecimento de drogas preciso.
[0018] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o membro em forma de cunha pode ter duas superfícies inclinadas. Uma superfície está acoplada no pistão ou na alavanca e a outra está acoplada a uma superfície inclinada em uma posição fixa. As duas superfícies inclinadas do membro em forma de cunha estão posicionadas de modo que estas sejam essencialmente opostas uma à outra. Será aparente para aqueles versados na técnica que esta disposição de superfícies inclinadas permite que o gradiente das superfícies seja reduzido enquanto retendo a deflexão causada pelo movimento do membro em forma de cunha.
[0019] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o membro em forma de cunha está disposto de modo que este não possa girar ao redor de seu eixo geométrico de deslocamento ou perpendicular ao seu eixo geométrico de deslocamento. Esta disposição aumenta a eficiência da deflexão causada pelo membro em forma de cunha quando este move entre as suas primeira e segunda posições.
[0020] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, a posição do pistão pode ser disposta em um ponto ao longo da alavanca para aumentar a precisão da microbomba. O posicionamento pistão sobre a alavanca em um ponto entre o ponto de contato entre o membro em forma de cunha e a alavanca, e o ponto de rotação fixo da alavanca permite que a precisão do movimento do pistão seja otimizada.
[0021] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o pistão está disposto de modo que tanto quanto possível a sua direção de deslocamento está restrita. Esta disposição aumenta a eficiência da deflexão causada pelo membro em forma de cunha ou a alavanca que atua sobre o pistão.
[0022] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, a alavanca é suficientemente rígida para evitar o dobramento da alavanca durante a ação do acionador mecânico em miniatura.
[0023] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, uma mola está incorporada para mover a alavanca de sua segunda posição para a sua primeira posição. A mola pode ser uma estrutura de silicone conectada na alavanca em uma extremidade e em um ponto fixo na outra.
[0024] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, uma mola está incorporada para mover o pistão de sua segunda posição para a sua primeira posição. A mola pode ser uma estrutura de silicone conectada no pistão em uma extremidade e em um ponto fixo na outra
[0025] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o acionador mecânico é utilizado para acionar o pistão alternante de uma microbomba para a infusão de drogas líquidas. A bomba pode compreender uma câmara de bombeamento que tem uma entrada e uma saída, em que o volume da câmara de bombeamento é feito mudar pela ação do acionador mecânico. Tal bomba pode fazer parte de um dispositivo de fornecimento de drogas que compreende um reservatório de droga mantido a uma pressão positiva de modo que quando a câmara de bombeamento está enchendo com a droga líquida, a pressão positiva do reservatório de droga auxilia no enchimento da câmara de bombeamento. Para impedir um fornecimento não intencional de droga líquida do reservatório de droga, válvulas estão providas na entrada e saída para a câmara de bombeamento. As válvulas podem ser projetadas de modo que a válvula de entrada permita que o fluido entre na câmara de bombeamento do reservatório de droga quando a câmara de bombeamento está enchendo, e a válvula de saída somente permite que o fluido passe através desta quando o volume da câmara de bombeamento é reduzido pela ação do acionador mecânico miniaturizado.
[0026] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o acionador mecânico está formado de peças que são essencialmente planas e que podem ser facilmente empilhadas juntas para formar o acionador mecânico miniaturizado. Esta modalidade preferida da presente invenção tem a vantagem de ser relativamente simples para fabricar.
[0027] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, as molas de retorno para o membro em forma de cunha e a alavanca são formadas de um material elastomérico tal como silicone, e formadas durante a fabricação do membro em forma de cunha ou da alavanca.
[0028] Em uma modalidade adicional de qualquer um dos acionadores mecânicos acima de acordo com a invenção, o acionador mecânico é adequado para uma microbomba com uma câmara de bombeamento com um volume menor do que 100 microlitros.
[0029] Os objetos acima e outras vantagens da presente invenção ficarão mais aparentes descrevendo em detalhes as modalidades preferidas da presente invenção em referência aos desenhos anexos nos quais:
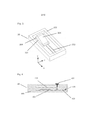
[0030] Figura 1 é uma seção transversal através de um acionador mecânico de acordo com uma primeira modalidade da invenção.
[0031] Figura 2 é uma seção transversal através de um acionador mecânico de acordo com uma primeira modalidade da invenção que mostra o fio de liga de memória de forma contraído e o pistão defletido para a sua segunda posição.
[0032] Figura 3 mostra a orientação do membro em forma de cunha, da liga de memória de forma e da mola de retorno.
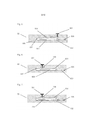
[0033] Figura 4 é uma seção transversal através de um acionador mecânico de acordo com uma segunda modalidade da invenção.
[0034] Figura 5 é uma seção transversal através de um acionador mecânico de acordo com uma segunda modalidade da invenção que mostra o fio de liga de memória de forma contraído e o pistão defletido para a sua segunda posição.
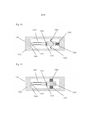
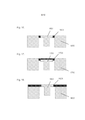
[0035] Figura 6 é uma seção transversal através de um acionador mecânico de acordo com uma terceira modalidade da invenção.
[0036] Figura 7 é uma seção transversal através de um acionador mecânico de acordo com uma terceira modalidade da invenção que mostra o fio de liga de memória de forma contraído e o pistão defletido para a sua segunda posição.
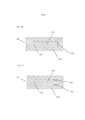
[0037] Figura 8 é uma seção transversal através de um acionador mecânico de acordo com uma quarta modalidade da invenção.
[0038] Figura 9 é uma seção transversal através de um acionador mecânico de acordo com uma quarta modalidade da invenção que mostra o fio de liga de memória de forma contraído e o pistão defletido para a sua segunda posição.
[0039] Figura 10 é uma vista plana de uma primeira modalidade do membro em forma de cunha, da liga de memória de forma e da mola de retorno de um acionador mecânico de acordo com a presente invenção.
[0040] Figura 11 é uma vista plana de uma segunda modalidade do membro em forma de cunha, da liga de memória de forma e da mola de retorno de um acionador mecânico de acordo com a presente invenção.
[0041] Figura 12 é uma vista plana de uma terceira modalidade do membro em forma de cunha, da liga de memória de forma e da mola de retorno de um acionador mecânico de acordo com a presente invenção.
[0042] Figura 13 é uma vista plana de uma quarta modalidade do membro em forma de cunha, da liga de memória de forma e da mola de retorno de um acionador mecânico de acordo com a presente invenção.
[0043] Figura 14 é uma vista plana de uma primeira modalidade da alavanca e molas de retorno de alavancas de um acionador mecânico de acordo com a presente invenção.
[0044] Figura 15 é uma vista plana de uma segunda modalidade da alavanca e molas de retorno de alavancas de um acionador mecânico de acordo com a presente invenção.
[0045] Figura 16 é uma seção transversal através de uma primeira disposição da mola de retorno sobre o pistão.
[0046] Figura 17 é uma seção transversal através de uma segunda disposição da mola de retorno sobre o pistão.
[0047] Figura 18 é uma seção transversal através de uma terceira disposição da mola de retorno sobre o pistão.
[0048] Figura 19 é uma seção transversal através de uma quarta disposição da mola de retorno sobre o pistão.
[0049] Figura 20 é uma seção transversal através de um acionador mecânico de acordo com uma quinta modalidade da invenção.
[0050] Figura 21 é uma seção transversal através de um acionador mecânico de acordo com uma quinta modalidade da invenção que mostra o fio de liga de memória de forma contraído e o pistão defletido para a sua segunda posição.
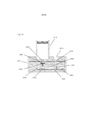
[0051] Figura 22 é uma vista em seção transversal de uma microbomba que compreende um acionador mecânico de acordo com a presente invenção.
[0052] A primeira modalidade do acionador mecânico está mostrada Na Figura 1. O acionador mecânico é um acionador mecânico em miniatura. A Figura 1 mostra o acionador mecânico miniaturizado 10 no seu estado não ativado. O acionador mecânico miniaturizado 10 compreende um membro em forma de cunha 102. O membro em forma de cunha 102 está disposto de modo que este possa mover em um plano em uma direção essencialmente linear. O membro em forma de cunha 102 tem pelo menos uma superfície inclinada disposta de modo que esta forme um ângulo com a direção de deslocamento do membro em forma de cunha 102. Um atuador de memória de forma 103 está fixo no membro em forma de cunha 102 em uma extremidade e na estrutura 105 do acionador mecânico miniaturizado 10. O atuador de memória de forma 103 está disposto de modo que este atue ao longo da direção de deslocamento linear do membro em forma de cunha 102. O atuador de memória de forma 103 é também referido como uma liga de memória de forma. Ambos os termos referem-se a um atuador feito de um material de liga de memória de forma material. Uma mola de retorno 104 está presa em uma extremidade do membro em forma de cunha 102 e na estrutura 105 do acionador mecânico miniaturizado 10 na outra extremidade. A mola de retorno 104 está disposta de modo que esta atue ao longo da direção de deslocamento linear do membro em forma de cunha 102. Um pistão 101 está disposto de modo que este esteja em contato direto com a superfície inclinada do membro em forma de cunha 102 em uma extremidade. I pistão 101 está ainda disposto de modo que este possa mover em uma direção que é essencialmente perpendicular ao plano no qual membro em forma de cunha 102 está disposto para mover. A Figura 1 mostra o dispositivo na posição de partida com o membro em forma de cunha 102 e o pistão 101 estando em sua primeira posição (também referida como a sua posição de partida), a liga de memória de forma 103 em um estado resfriado e alongado e a mola de retorno 104 contraída.
[0053] A liga de memória de forma 103 pode estar na forma de um fio formado de um número de ligas metálicas de efeito de memória tal como NiTi (Níquel - Titânio), CuZnAl, e CuAlNi. A liga de memória de forma pode estar fixa na estrutura 105 e no membro em forma de cunha 102 utilizando técnicas tais como crimpagem ou outras técnicas conhecidas daqueles versados na técnica. Em uma modalidade preferida a mola de retorno 104 está formada de um material elastomérico tal como silicone ou borracha. Em uma modalidade preferida a mola de retorno 104 está formada por moldagem por injeção ou fundição do material elastomérico. Em uma modalidade preferida adicional a mola de retorno 104 está formada moldando o material elastomérico e então curando o material com radiação. Em uma modalidade preferida adicional o material elastomérico está moldado por injeção ou fundido in situ para fixar a mola de retorno 104 no membro em forma de cunha 102 e na estrutura 105. Um número de materiais elastoméricos são adequados para este propósito incluindo preparações de silicone líquido autoadesivo para moldagem por injeção tal como Elastosil LR 3071 e Silpuran 6700 (Wacker Chemie AG, München, Germany) e as preparações de silicone líquido autoadesivo para moldagem e cura por luz ultravioleta tal como Loctite Nuva-Sil Silicone (Henkel AG & Co. KGaA, Düsseldorf, Germany) e Novaguard RTV 800-305 (NovaGuard, Clevland, Ohio, USA). É preferido que o material utilizado na fabricação da estrutura 105 seja o mesmo que o material escolhido para o membro em forma de cunha 102. Isto simplificaria o processo de fabricação e poderia permitir a fabricação do membro em forma de cunha 102 e da estrutura 105 em um único processo tal como uma etapa de moldagem por injeção.
[0054] A Figura 2 mostra o acionador mecânico descrito na Figura 1 quando o acionador mecânico foi operado. A operação do acionador mecânico 20 requer que a liga de memória de forma 203 seja aquecida, de preferência passando uma corrente elétrica através desta. A liga de memória de forma 203 contrai quando aquecida e atua para deslocar o membro em forma de cunha 202 para a sua segunda posição. O deslocamento do membro em forma de cunha 202 atua para alongar a mola de retorno 204. O deslocamento do membro em forma de cunha 202 para a sua segunda posição também atua para deslocar o pistão 201 para a sua segunda posição e em uma direção linear essencialmente perpendicular ao plano de movimento do membro em forma de cunha 202. A Figura 2 mostra a liga de memória de forma 203 em um estado contraído, o membro em forma de cunha 202 na sua segunda posição, a mola de retorno 205 em um estado alongado e o pistão 201 deslocado para a segunda posição.
[0055] Quando a liga de memória de forma 203 é permitida esfriar ou é ativamente esfriada, a liga de memória de forma 203 estende. Quando a liga de memória de forma 203 é permitida esfriar, a mola de retorno 204 atua para retornar o membro em forma de cunha 202 para a primeira posição. Quando o membro em forma de cunha 202 retorna para a sua primeira posição o pistão 201 retorna para a sua primeira posição. As primeiras posições (também referidas como as posições de partida) do membro em forma de cunha 202 e do pistão 201 são as posições mostradas na Figura 1 do membro em forma de cunha 102 e do pistão 101.
[0056] A Figura 3 mostra uma modalidade preferida do membro em forma de cunha 301 e da estrutura 302 de um acionador mecânico miniaturizado 30 de acordo com esta invenção. Uma liga de memória de forma 303 está fixa no membro em forma de cunha 301 em uma extremidade e na estrutura 302 na outra extremidade. Uma mola de retorno 304 está fixa no membro em forma de cunha 301 em uma extremidade e na estrutura 302 na outra extremidade. O membro em forma de cunha 301 está disposto de modo que este move em um modo linear ao longo do eixo geométrico x do acionador mecânico miniaturizado 30. O membro em forma de cunha 301 está também de preferência disposto de modo que a superfície inclinada do membro em forma de cunha 304 possa mover ao longo do eixo geométrico x enquanto mantendo um ângulo fixo com o eixo geométrico z e o eixo geométrico x. Em uma modalidade preferida o membro em forma de cunha 301 está disposto de modo que este não possa girar ao redor do eixo geométrico x ou eixo geométrico y.
[0057] A Figura 4 mostra uma segunda modalidade do acionador mecânico de acordo com a presente invenção substancialmente idêntica à primeira modalidade do acionador mecânico de acordo com a presente invenção descrito com referência às Figuras 1 e 2 e que incorpora um membro em forma de cunha como descrito com referência à Figura 3 exceto que uma alavanca 404 está incluída para operativamente conectar o membro em forma de cunha 402 no pistão 401. A alavanca 404 é rotativa em um ponto de rotação fixo. O membro em forma de cunha 402 está operativamente acoplado na e em contato constante com a alavanca 404 em um ponto a uma distância do ponto de rotação fixo para defletir a alavanca 404 ao redor do ponto de rotação fixo. Um ponto de acionamento de pistão está localizado sobre e em contato constante com a alavanca 404, a uma distância do ponto de rotação fixo da alavanca 404. O pistão 401 está em contato constante com a alavanca 404 no ponto de acionamento de pistão. Será apreciado por aqueles versados na técnica que os elementos da primeira modalidade e do membro em forma de cunha descrito com referência à Figura 3 podem ser combinados na segunda modalidade. A Figura 4 mostra a segunda modalidade do acionador mecânico 40 de acordo com a presente invenção na posição de partida. O membro em forma de cunha 402, a alavanca 404 e o pistão 401 estão na primeira posição. A liga de memória de forma 403 está alongada e a mola de retorno 405 comprimida. A alavanca 404 está disposta de modo que esta esteja em contato constante com o membro em forma de cunha 402. O membro em forma de cunha 402 está conectado na estrutura 406 através da mola de retorno 405. O ponto de rotação fixo é também referido como ponto de articulação. Ambos os termos referem-se ao ponto fixo ao redor do qual a alavanca 404 em uso gira.
[0058] A Figura 5 mostra a forma ativada da segunda modalidade do acionador mecânico de acordo com a presente invenção. A liga de memória de forma 503 é aquecida de preferência passando uma corrente elétrica através desta. A liga de memória de forma 503 aquecida contrai e move o membro em forma de cunha 502 de sua primeira posição mostrada na Figura 4 para a sua segunda posição mostrada na Figura 5. Quando o membro em forma de cunha 502 move de sua primeira posição para a sua segunda posição este alonga a mola de retorno 505. Quando o membro em forma de cunha 502 move de sua primeira posição para a sua segunda posição este também move a alavanca 504 de sua primeira posição mostrada na Figura 4 para a sua segunda posição mostrada na Figura 5. A alavanca move em uma direção angular ao redor do ponto de articulação 507. Quando a alavanca 504 move para a sua segunda posição esta move o pistão 501 de sua primeira posição mostrada na Figura 4 para a sua segunda posição mostrada na Figura 5. No acionador mecânico 50, a alavanca 504 está conectada na estrutura no ponto de rotação fixo 507. O ponto de acionamento de pistão é também referido como ponto de contato. Ambos os termos referem-se ao ponto sobre a alavanca 504 pelo qual o pistão 501 é acionado para mover.
[0059] A Figura 6 mostra uma terceira modalidade do acionador mecânico de acordo com a presente invenção que é substancialmente similar à segunda modalidade descrita nas Figuras 4 e 5 exceto pela localização do ponto de contato 606 (também referido como ponto de acionamento de pistão) entre o pistão 601 e a alavanca 604. O pistão 601 está disposto em um ponto entre o ponto de articulação 607 da alavanca 604 e a extremidade da alavanca em contato com o membro em forma de cunha 602. A localização do ponto de contato 606 pode ser fixa em relação ao ponto de articulação 607 e o ponto de contato da alavanca com o membro em forma de cunha 602 para otimizar a precisão do movimento do pistão 601. Como exemplo, um erro em mover a alavanca no ponto de contato com o membro em forma de cunha 602 pode ser reduzido fixando o ponto de contato 606 mais próximo do ponto de articulação 607. A Figura 6 mostra a terceira modalidade do acionador mecânico 60 de acordo com a presente invenção na posição de partida com o membro em forma de cunha 602, a alavanca 604 e o pistão 601 estando na sua primeira posição, a liga de memória de forma 603 em um estado resfriado e alongado e a mola de retorno 605 contraída.
[0060] Aqueles versados na técnica apreciarão que elementos do projeto de membro em forma de cunha descrito na Figura 3 podem ser incorporados na terceira modalidade na presente invenção. Aqueles versados na técnica também apreciarão que os elementos do projeto da alavanca descrita nas Figuras 14 e 15 podem também ser incorporados na terceira modalidade do acionador mecânico de acordo com a presente invenção.
[0061] A Figura 7 mostra a terceira modalidade do acionador mecânico de acordo com a presente invenção em um estado ativado. A ativação da terceira modalidade do acionador mecânico de acordo com a presente invenção é substancialmente similar à ativação da segunda modalidade do acionador mecânico de acordo com a presente invenção. O membro em forma de cunha 702, a alavanca 704 e o pistão 701 e o acionador mecânico 70 estão localizados na sua segunda posição. A Figura 7 mais ainda mostra a liga de memória de forma 703, a mola de retorno 705 e o ponto de acionamento de pistão 706.
[0062] A Figura 8 mostra uma quarta modalidade do acionador mecânico de acordo com a presente invenção que é substancialmente similar à segunda e terceira modalidades do acionador mecânico de acordo com a presente invenção com a exceção do membro em forma de cunha 802. O membro em forma de cunha 802 na quarta modalidade do acionador mecânico de acordo com a presente invenção tem duas superfícies inclinadas. A primeira superfície inclinada está em contato com a alavanca 804 e a segunda superfície inclinada está disposta sobre a superfície oposta do membro em forma de cunha 804 para a primeira superfície inclinada. A segunda superfície inclinada do membro em forma de cunha 802 está em contato com a estrutura 807. A área da estrutura 807 que está em contato com o membro em forma de cunha 802 está também inclinada para acomodar a superfície inclinada do membro em forma de cunha 802. A superfície inclinada da estrutura 807 está também disposta de modo que quando o membro em forma de cunha 802 é movido de sua primeira posição para a sua segunda posição a superfície inclinada da estrutura 807 deflete o membro em forma de cunha na direção da alavanca 804. O estado ativado da quarta modalidade do acionador mecânico de acordo com a presente invenção está descrito em maiores detalhes na Figura 9. Será aparente para aqueles versados na técnica que certos aspectos do membro em forma de cunha descrito na Figura 3 podem ser incorporados na quarta modalidade do acionador mecânico de acordo com a presente invenção. A Figura 8 shows mostra a quarta modalidade do acionador mecânico de acordo com a presente invenção na posição de partida. O membro em forma de cunha 802, a alavanca 804 e o pistão 801 estão na primeira posição. A liga de memória de forma 803 está alongada e a mola de retorno 805 comprimida. A alavanca 804 está disposta de modo que esta esteja em contato constante com o membro em forma de cunha 802. A Figura 8 mais ainda mostra o ponto de acionamento de pistão 806 da alavanca 804 do acionador mecânico 80. A Figura 9 mostra o estado ativado da quarta modalidade do acionador mecânico de acordo com a presente invenção. A liga de memória de forma 903 é aquecida de preferência passando uma corrente elétrica através desta. A liga de memória de forma 903 aquecida contrai e move o membro em forma de cunha 902 de sua primeira posição mostrada na Figura 8 para a sua segunda posição mostrada na Figura 9. Quando o membro em forma de cunha 902 move de sua primeira posição para a sua segunda posição este alonga a mola de retorno 905. Quando o membro em forma de cunha 902 move de sua primeira posição para a sua segunda posição este move ao longo da superfície inclinada da estrutura 907 de modo que a superfície inclinada da estrutura 907 e a superfície inclinada do membro em forma de cunha 902 atuem cooperativamente para deslocar o membro em forma de cunha 902 na direção da alavanca 904.
[0063] Quando o membro em forma de cunha 902 move de sua primeira posição para a sua segunda posição este move a alavanca 904 de sua primeira posição mostrada na Figura 8 para a sua segunda posição mostrada na Figura 9. Quando a alavanca 904 move para a sua segunda posição esta move o pistão 901 de sua primeira posição mostrada na Figura 8 para a sua segunda posição mostrada na Figura 9. A Figura 9 mais ainda mostra o pistão 901 e o ponto de acionamento de pistão 906 da alavanca 904 do acionador mecânico 90. A quarta modalidade do acionador mecânico de acordo com a presente invenção tem a vantagem de amentar a distância que o membro em forma de cunha é capaz de deslocar a alavanca e o pistão para um dado comprimento de contração pela liga de memória de forma sem um aumento no ângulo da superfície inclinada.
[0064] Será apreciado por aqueles versados na técnica que o membro em forma de cunha e a estrutura descritos na quarta modalidade do acionador mecânico de acordo com a presente invenção podem ser incorporados na primeira e segunda modalidades do acionador mecânico de acordo com a presente invenção.
[0065] As Figuras 10, 11, 12 e 13 mostram disposições alternativas do membro em forma de cunha e da liga de memória de forma e da mola de retorno. A Figura 10 mostra uma disposição da liga de memória de forma 1001 fixa em uma extremidade do membro em forma de cunha 1002 em um primeiro ponto de fixação 1004 e na estrutura 1006 no segundo ponto de fixação 1005. A Figura 10 mostra uma disposição do membro em forma de cunha e da mola de retorno 1003. A mola de retorno 1003 está disposta de modo que uma extremidade está fixa na estrutura e a outra está fixa na extremidade do membro em forma de cunha 1002 que está oposta ao ponto de fixação 1004 da liga de memória de forma. A Figura 11 mostra uma disposição alternativa para a liga de memória de forma 1101 que é substancialmente similar à disposição mostrada na Figura 10 exceto para a disposição da liga de memória de forma 1101. A liga de memória de forma 1101 está fixa no primeiro ponto de fixação 1104 da estrutura 1108 e em um segundo ponto de fixação 1105 na estrutura 1108. A liga de memória de forma 1101 é passada ao redor de dois membros 1106 e 1107 posicionados sobre o membro em forma de cunha 1102 de modo que esta está livre para deslizar ao redor destes membros. Esta disposição é vantajosa em que as conexões elétricas para a liga de memória de forma 1101 podem também servir como os pontos de fixação 1104 e 1105. O membro em forma de cunha 1102 está conectado na estrutura 1108 através da mola de retorno 1103. A Figura 12 mostra uma disposição alternativa substancialmente similar àquela mostrada na Figura 11 com a adição de uma ponte de conexão 1208 e 1209 entre o membro em forma de cunha 1202 e a estrutura 1210. Os membros 1208 e 1209 estão dispostos para permitir que o membro em forma de cunha 1202 pelo menos mova ao longo de seu plano de movimento pretendido. Os membros 1208 e 1209 são vantajosos por permitir que o membro em forma de cunha e a estrutura sejam moldados como uma unidade única. A liga de memória de forma 1201 é passada ao redor dos dois membros 1206 e 1207 e fixa no primeiro e segundo pontos de fixação 1204, 1205. O membro em forma de cunha 1202 está conectado na estrutura 1210 através da mola de retorno 1203. Aqueles versados na técnica apreciarão que as características podem ser combinadas com a disposição mostrada na Figura 10. A Figura 13 mostra uma disposição alternativa do membro em forma de cunha e da mola de retorno. A mola de retorno 1307 e 1308 está fixa em uma extremidade na estrutura 1309 e na outra extremidade a um lado do membro em forma de cunha 1302 outro que o lado que é oposto ao ponto de fixação da liga de memória de forma 1301. A liga de memória de forma 1301 é passada ao redor de dois membros 1306 e 1307 e fixa no primeiro e no segundo pontos de fixação 1303, 1304. Aqueles versados na técnica apreciarão que certos elementos da disposição mostrada na Figura 13 podem ser incorporados na disposição mostrada na Figura 10. Será também aparente para aqueles versados na técnica que as características descritas na disposição mostrada na Figura 12 podem ser incorporadas na disposição descrita na Figura 13.
[0066] A liga de memória de forma pode ser fixa nos pontos de fixação utilizando crimpagem, soldagem ou soldadura. Aqueles versados na técnica apreciarão que outros métodos existem para fixar a liga de memória de forma.
[0067] Será aparente para aqueles versados na técnica que certos aspectos das disposições mostradas nas Figuras 10, 11, 12 e 13 podem ser incorporados em outras modalidades da presente invenção.
[0068] As Figuras 14 e 15 mostram a adição de uma mola de retorno à alavanca descrita nas Figuras 4 e 5. A mola de retorno atua para retornar a alavanca para a sua posição inicial e manter a extremidade móvel da alavanca em contato constante com o membro em forma de cunha. Na Figura 14 a mola de retorno 1402 está formada de modo que uma extremidade está conectada na alavanca 1401 e a outra extremidade está conectada na estrutura 1404. A Figura 14 mostra a mola de retorno 1402 fixa na extremidade da alavanca 1401 capaz de girar ao redor do ponto de articulação 1403.
[0069] A Figura 15 mostra uma modalidade alternativa da mola de retorno para a alavanca. A mola de retorno 1502 e 1503 está presa em uma extremidade no lado da alavanca 1501 e na outra extremidade na estrutura 1505. Será aparente para aqueles versados na técnica que existem outras disposições adequadas para a mola de retorno. A alavanca 1501 é rotativa ao redor do ponto de articulação 1054.
[0070] Em uma modalidade preferida a mola de retorno 1402, 1502 e 1503 está formada de um material elastomérico tal como silicone ou borracha. Em uma modalidade preferida a mola de retorno 1402, 1502 e 1503 está formada por moldagem por injeção ou fundição do material elastomérico. Em uma modalidade preferida adicional a mola de retorno 1402, 1502 e 1503 está formada por fundição do material elastomérico e então curando o material com radiação. Em uma modalidade preferida adicional o material elastomérico é moldado por injeção ou fundido in situ e para fixar a mola de retorno 1402, 1502 e 1503 na alavanca 1401 e 1501 e na estrutura 1404 e 1505. Um número de materiais elastoméricos são adequados para este propósito incluindo preparações de silicone líquido autoadesivo para moldagem por injeção tal como Elastosil LR 3071 e Silpuran 6700 (Wacker Chemie AG, München, Germany) e as preparações de silicone líquido autoadesivo para moldagem e cura por luz ultravioleta tal como Loctite Nuva-Sil Silicone (Henkel AG & Co. KGaA, Düsseldorf, Germany) e Novaguard RTV 800-305 (NovaGuard, Clevland, Ohio, USA). É preferido que o material utilizado na fabricação da estrutura 105 seja o mesmo que o material escolhido para o membro em forma de cunha 102. Isto simplificaria o processo de fabricação e poderia permitir a fabricação do membro em forma de cunha 102 e da estrutura 105 em um único processo tal como uma etapa de moldagem por injeção.
[0071] A alavanca 1401 e 1501 é feita de um polímero que provê as propriedades mecânicas apropriadas e resiste ao desgaste do movimento do membro em forma de cunha e do pistão. É preferido que o material também tenha um baixo coeficiente de atrito. Materiais tais como poliéter éter cetona (PEEK), Grivory e policarbonato e poliacrilato são todos materiais adequados para a alavanca 1401 e 1501. Aqueles versados na técnica reconhecerão outros materiais apropriados para a alavanca 1401 e 1501. A alavanca 1401 e 1501 pode ser fabricada utilizando técnicas de moldagem de injeção de polímero ou fundição de polímero. Outros métodos para fabricação da alavanca 1401 e 1501 são conhecidos daqueles versados na técnica. É preferido que a técnica de fabricação utilizada para formar a alavanca 1401 e 1501 possa produzir peças com uma precisão melhor do que +/- 20 mícrons. É também preferido que as técnicas escolhidas para fabricar a alavanca 1401 e 1501 possa produzir grandes números de peças, rapidamente e economicamente. É preferido que o material na fabricação da estrutura 1404 e 1505 seja o mesmo que o material escolhido para a alavanca 1401 e 1501. Isto simplificaria o processo de fabricação e poderia permitir a fabricação da alavanca 1401 e 1501 da estrutura 1404 e 1505 em um único processo tal como uma etapa de moldagem por injeção.
[0072] Na Figura 14 e na Figura 15 está descrita uma alavanca 1401 e 1501 respectivamente onde uma extremidade da alavanca está fixa na estrutura 1404 e 1505 respectivamente por um ponto de articulação 1404 e 1504 respectivamente. Em uma modalidade preferida o ponto de articulação 1404 e 1504 pode ser formado removendo o material da alavanca 1401 e 1501 nesta parte do dispositivo para permitir que a alavanca dobre e que o dobramento seja essencialmente restrito ao ponto de articulação 1404 e 1504. Será apreciado por aqueles versados na técnica que estruturas de ponto de articulação alternativas podem ser utilizadas.
[0073] Será apreciado por aqueles versados na técnica que as modalidades da alavanca mostrada nas Figuras 14 r 15 podem ser incorporadas em outras modalidades do acionador mecânico de acordo com a presente invenção.
[0074] As Figuras 16, 17, 18 e 19 mostram disposições alternativas para uma mola de retorno para o pistão. A mola de retorno atua para retornar o pistão para a sua posição inicial (sua primeira posição) e manter o pistão em contato constante com a alavanca ou o membro em forma de cunha nas modalidades da presente invenção. A Figura 16 mostra uma mola de retorno 1603 formada entre o perímetro de uma abertura na estrutura 1602 e o perímetro do pistão 1601. A Figura 17 mostra mola de retorno 1703 formada entre o perímetro de uma abertura na estrutura 1702 e a superfície e perímetro do pistão 1601. A Figura 18 mostra uma mola de retorno 1803 formada sobre uma face da estrutura 1802 e o perímetro do pistão 1801. A Figura 19 mostra uma mola de retorno 1903 formada sobre uma face da estrutura 190 e a superfície e perímetro do pistão 1901.
[0075] Em uma modalidade preferida a mola de retorno para o pistão 1601, 1701, 1801 e 1901 está formada de um material elastomérico tal como silicone ou borracha. Em uma modalidade preferida a mola de retorno para o pistão 1601, 1701, 1801 e 1901 está formada por moldagem por injeção ou fundição do material elastomérico. Em uma modalidade preferida adicional a mola de retorno do pistão 1601, 1701, 1801 e 1901 está formada fundindo o material elastomérico e então curando o material com radiação. Em uma modalidade preferida adicional o material elastomérico é moldado por injeção ou fundido in situ e para fixar a mola de retorno para o pistão 1601, 1701, 1801 e 1901 no pistão 1601, 1701, 1801 e 1901 e na estrutura 1602, 1702, 1802 e 1902. Um número de materiais elastoméricos são adequados para este propósito incluindo preparações de silicone líquido autoadesivo para moldagem por injeção tal como Elastosil LR 3071 e Silpuran 6700 (Wacker Chemie AG, München, Germany) e as preparações de silicone líquido autoadesivo para moldagem e cura por luz ultravioleta tal como Loctite Nuva-Sil Silicone (Henkel AG & Co. KGaA, Düsseldorf, Germany) e Novaguard RTV 800-305 (NovaGuard, Clevland, Ohio, USA). É preferido que o material utilizado na fabricação da estrutura 1602, 1702, 1802 e 1902 seja o mesmo que o material escolhido para o pistão 1601, 1701, 1801 e 1901. Isto simplificaria o processo de fabricação e poderia permitir a fabricação do pistão 1601, 1701, 1801 e 1901 e da estrutura 1602, 1702, 1802 e 1902 em um único processo tal como uma etapa de moldagem por injeção.
[0076] Será aparente para aqueles versados na técnica que as disposições para uma mola de retorno para o pistão descritas nas Figuras 16, 17, 18 e 19 podem ser incorporadas em outras modalidades do acionador mecânico de acordo com a presente invenção, tal como a primeira, segunda, terceira, quarta e quinta modalidades descritas do acionador mecânico.
[0077] Em uma modalidade preferida a mola de retorno para o pistão pode formar a membrana de bombeamento de uma microbomba.
[0078] A Figura 20 descreve uma quinta modalidade do acionador mecânico de acordo com a presente invenção. Os elementos da quinta modalidade do acionador mecânico de acordo com a presente invenção são essencialmente similares ao elemento descrito na terceira modalidade do acionador mecânico de acordo com a presente invenção na Figura 6. Os elementos da quinta modalidade do acionador mecânico de acordo com a presente invenção estão dispostos de modo que quando no estado inativo as molas de retorno 2004, 2007 e 2005 são colocadas sob tensão quando o dispositivo é montado. O tensionamento da mola de retorno 2004 assegura que o pistão 2001 esteja constantemente em contato com a alavanca 2004 e assegure que qualquer movimento na alavanca 2004 move o pistão 2001. Isto aumenta a precisão e a repetitividade da ação do acionador mecânico. O tensionamento da mola de retorno 2007 assegura que a alavanca 2004 esteja constantemente em contato com a superfície inclinada do membro em forma de cunha 2002 e assegure que o movimento do membro em forma de cunha 2002 mova a alavanca 2004. Isto ainda aumenta a precisão e repetitividade da ação do acionador mecânico. O tensionamento da mola de retorno 2005 assegura que a liga de memória de forma 2003 seja mantida em tensão e assegura que a contração da liga de memória de forma 2003 mova a liga de memória de forma 2003. Isto ainda aumenta a precisão e repetitividade da ação do dispositivo. A Figura 20 mostra a quinta modalidade da presente invenção na posição de partida. O membro em forma de cunha 2002, a alavanca 2004 e o pistão 2001 estão na primeira posição. A liga de memória de forma 2003 está alongada e as molas de retorno 2004, 2005 e 2007 estão em seus respectivos primeiros pontos de tensão. Mais ainda, a estrutura 2006 do acionador mecânico 200 está mostrada.
[0079] A Figura 21 mostra a quinta modalidade do acionador mecânico de acordo com a presente invenção em um estado ativado e é similar ao estado ativado descrito com referência à terceira modalidade do acionador mecânico de acordo com a presente invenção. O pistão 2101, as molas de retorno 2104, 2105, 2107, o membro em forma de cunha 2102, a liga de memória de forma 2103, a alavanca 2104, e a estrutura 2106 do acionador mecânico 210 estão mostrados.
[0080] Um exemplo da aplicação do acionador mecânico miniaturizado de acordo com o acionador mecânico de acordo com a presente invenção é como uma microbomba como mostrado na Figura 22. A microbomba 220 tem uma câmara de bombeamento 2207 com conexão fluídica através de uma válvula de entrada 2208 para um reservatório 2211. Pelo menos parte da parede de câmara de bombeamento é flexível, e em uma modalidade preferida o pistão 2204 do acionador mecânico em miniatura está fixo na porção flexível da parede de câmara de bombeamento. Em uma modalidade preferida a porção flexível da parede de câmara de bombeamento 2207 forma a mola de retorno para o pistão 2204 como descrito com referência às Figuras 16, 17, 18 e 19. O aquecimento da liga de memória de forma 2202 faz com que liga de memória de forma 2202 contraia e desloque o membro em forma de cunha 2201 de sua primeira posição para a sua segunda posição. Isto faz com que a mola de retorno 2205 sobre o membro em forma de cunha 2201 seja esticada de sua primeira posição para a sua segunda posição. O movimento do membro em forma de cunha 2201 também desloca a alavanca 2203 de sua primeira posição para a sua segunda posição e a alavanca 2203 desloca o pistão 2204 de sua primeira posição para a sua segunda posição. A alavanca 2023 está conectada na estrutura através de uma mola de retorno 2212 e girada ao redor do ponto de rotação fixo 2206. O movimento do pistão 2204 de sua primeira posição para sua segunda posição faz com que o volume da câmara de bombeamento 2207 diminua e força o fluido para fora da câmara de bombeamento 2207 através da válvula de saída 2209. Permitindo a liga de memória de forma 2202 esfriar faz com que a liga de memória de forma 2202 alongue para o seu comprimento de partida assistida pela contração da mola de retorno 2205 sobre o membro em forma de cunha 2201 para o seu comprimento de partida. O movimento do membro em forma de cunha 2201 para a sua primeira posição permite que a alavanca 2203 seja retornada para a sua primeira posição pela ação da mola de retorno 2212 sobre a alavanca 2203. O retorno da alavanca 2203 para a sua primeira posição permite que o pistão seja retornado para a sua primeira posição pela ação da mola de retorno sobre o pistão. O retorno do pistão 2204 para a sua primeira posição aumenta o volume da câmara de bombeamento 2207 e permite o fluido entrar na câmara de bombeamento 2207 do reservatório 2211 através da válvula de entrada 2208.
[0081] A válvula de entrada 2208 e a válvula de saída 2209 are são válvulas de uma via. A válvula de saída 2209 abre quando a pressão dentro da câmara de bombeamento 2207 aumenta quando o pistão 2204 é movido de sua primeira posição para a sua segunda posição e o volume da câmara de bombeamento 2207 diminui. A válvula de entrada 2208 fecha quando a pressão dentro da câmara de bombeamento aumenta. Quando a câmara de bombeamento está cheia com fluido, o fluido é seletivamente forçado através da válvula de saída quando o pistão move da sua primeira posição para a sua segunda posição. A válvula de entrada abre quando a pressão dentro da câmara de bombeamento 2207 diminui conforme o pistão 2204 retorna de sua segunda posição para a sua primeira posição e o volume da câmara de bombeamento 2207 aumenta. A válvula de saída 2209 fecha quando a pressão dentro da câmara de bombeamento diminui. Portanto, o fluido é seletivamente aspirado do reservatório 2211 para dentro da câmara de bombeamento 2207 quando o pistão move para a sua segunda posição de sua primeira posição. Uma operação repetida da microbomba 220 faz com que o fluido seja bombeado do reservatório 2211 para a saída 2210. Para ajudar a aspiração de fluido do reservatório 2211, o reservatório 2211 pode ser pressurizado.
[0082] A microbomba descrita com referência à Figura 22 encontra utilização específica em um sistema de infusão para a infusão de produtos terapêuticos.
[0083] As seguintes características são oferecidas como uma descrição adicional do acionador mecânico, bomba e sistema de infusão de acordo com a invenção.
[0084] Acionador mecânico em miniatura que compreende: um pistão, um membro em forma de cunha operativamente acoplado na e em contato constante com o pistão e capaz de defletir o pistão, e uma liga de memória de forma operativamente acoplada no membro em forma de cunha e capaz de mover o membro em forma de cunha de modo que o membro em forma de cunha defleta o pistão, a liga de memória de forma é mantida em uma tensão predeterminada na sua posição de partida.
[0085] Acionador mecânico que compreende: uma alavanca, capaz de girar em um ponto fixo, um membro em forma de cunha operativamente acoplado na e em contato constante com a alavanca em um ponto a alguma distância do ponto de rotação fixo, e capaz de defletir a alavanca ao redor do ponto de rotação fixo, uma liga de memória de forma operativamente acoplada no membro em forma de cunha e capaz de mover o membro em forma de cunha de modo que o membro em forma de cunha defleta a alavanca, a liga de memória de forma é mantida em uma tensão predeterminada na sua posição de partida, e um ponto de acionamento de pistão localizado sobre e em contato constante com a alavanca, a alguma distância do ponto de rotação fixo da alavanca.
[0086] Acionador mecânico de acordo com a característica 1 ou 2, em que o membro em forma de cunha tem uma única superfície inclinada operativamente acoplada no pistão ou na alavanca.
[0087] Acionador mecânico de acordo com a característica 1 ou 2, em que o membro em forma de cunha tem duas superfícies inclinadas operativamente acopladas no pistão ou na alavanca.
[0088] Acionador mecânico de acordo com a característica 3 ou 4, em que o membro em forma de cunha tem superfícies em cada extremidade de cada superfície inclinada que são essencialmente planas à direção de deslocamento do membro em forma de cunha e que estão em contado com o pistão ou a alavanca quando o membro em forma de cunha está na sua primeira e segunda posições respectivamente.
[0089] Acionador mecânico de acordo com qualquer uma das características precedentes, em que o membro em forma de cunha está preso na estrutura por cordões flexíveis.
[0090] Acionador mecânico de acordo com qualquer uma das características precedentes, em que a liga de memória de forma é um fio.
[0091] Acionador mecânico de acordo com a característica 7, em que o fio de memória de forma está fixo em uma extremidade no membro em forma de cunha.
[0092] Acionador mecânico de acordo com a característica 7 ou 8, em que o fio de memória de forma está enrolado ao redor de pelo menos parte do membro em forma de cunha e as extremidades do fio de memória de forma estão presas em pontos fixos.
[0093] Acionador mecânico de acordo com qualquer uma das características 2-9, em que o ponto de acionamento de pistão está localizado em relação ao ponto de rotação fixo da alavanca e o ponto de acoplamento do membro em forma de cunha com a alavanca de modo a otimizar a precisão de movimento do pistão.
[0094] Acionador mecânico de acordo com qualquer uma das características precedentes, ainda compreendendo uma mola de retorno operativamente acoplada no membro em forma de cunha, e atuando contra a força da liga de memória de forma.
[0095] Acionador mecânico de acordo com a característica 11, em que a mola de retorno é um material elastomérico.
[0096] Acionador mecânico de acordo com a característica 11 ou 12, em que a mola de retorno é fabricada utilizando uma técnica de moldagem por injeção ou fundição.
[0097] Acionador mecânico de acordo com qualquer uma das características precedentes, ainda compreendendo uma mola de retorno operativamente acoplada no pistão, e atuando para retornar o pistão para a sua posição de partida.
[0098] Acionador mecânico de acordo com a característica 14, em que a mola de retorno sobre o pistão é tensionada quando o pistão está na sua posição de partida.
[0099] Acionador mecânico de acordo com a característica 14 ou 15, em que a mola de retorno forma a membrana de bombeamento de uma microbomba.
[00100] Acionador mecânico de acordo com qualquer uma das características 14-16, em que a mola de retorno é um material elastomérico.
[00101] Acionador mecânico de acordo com a característica 17, em que a mola de retorno é fabricada utilizando uma técnica de moldagem por injeção ou fundição.
[00102] Acionador mecânico de acordo com qualquer uma das características precedentes, ainda compreendendo uma mola de retorno operativamente acoplada na alavanca, e atuando para retornar a alavanca para a sua posição de partida.
[00103] Acionador mecânico de acordo com a característica 19, em que a mola de retorno sobre a alavanca é tensionada quando a alavanca está na sua posição de partida.
[00104] Acionador mecânico de acordo com a característica 19 ou 20, em que a mola de retorno é um material elastomérico.
[00105] Acionador mecânico de acordo com a característica 21, em que a mola de retorno é fabricada utilizando uma técnica de moldagem por injeção ou fundição.
[00106] Bomba que compreende acionador mecânico em miniatura de acordo com qualquer característica precedente.
[00107] Bomba de acordo com a característica 23 para bombear um produto terapêutico líquido que compreende uma câmara de bombeamento que tem uma válvula de entrada e uma válvula de saída, em que um volume da câmara de bombeamento é feito mudar pela atuação do acionador mecânico em miniatura.
[00108] Sistema de infusão que inclui a bomba de qualquer uma das características 23 e 24.
[00109] Será aparente para aqueles versados na técnica que várias modificações da presente invenção são previstas sem afastar do escopo da invenção, o qual está definido pelas reivindicações anexas.
Claims (24)
1. Acionador mecânico (60) para acionar um pistão (601) em movimento alternado, sendo que o acionador mecânico (60) compreende: um membro em forma de cunha (602); uma liga de memória de forma (603) de forma operativamente acoplada no membro em forma de cunha (602) para mover o membro em forma de cunha (602), sendo que a liga de memória de forma (603) é mantida em uma tensão predeterminada na sua posição de partida; caracterizado pelo fato de que uma alavanca (604) a qual é rotativa em um ponto de rotação fixo (607), e em que um membro em forma de cunha (602) é operativamente acoplado na e em contato constante com a alavanca (604) em um ponto a uma distância do ponto de rotação fixo (607) para defletir a alavanca (604) ao redor do ponto de rotação fixo (607), o movimento do membro em forma de cunha deflete a alavanca (604), e um ponto de acionamento de pistão (606) para contatar o pistão (601), o ponto de acionamento de pistão (606) estando localizado sobre e em contato direto com a alavanca (604), a uma distância do ponto de rotação fixo (607) da alavanca (604).
2. Acionador mecânico (60) de acordo com a reivindicação 1, caracterizado pelo fato de que o acionador mecânico (60) compreende um pistão (601) em contato constante com a alavanca (604) no ponto de acionamento de pistão (601).
3. Acionador mecânico (60) de acordo com a reivindicação 1 ou 2, caracterizado pelo fato de que a distância entre o ponto de rotação fixo (607) e a localização onde a alavanca (604) está em contato com o membro em forma de cunha (602) é maior ou igual à distância entre o ponto de rotação fixo (607) e o ponto de acionamento de pistão (601).
4. Acionador mecânico (60) de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que o membro em forma de cunha (602) tem uma única superfície inclinada.
5. Acionador mecânico (60) de acordo com a reivindicação 4, caracterizado pelo fato de que a superfície inclinada é uma superfície reta inclinada.
6. Acionador mecânico (60) de acordo com qualquer uma das reivindicações 1 a 3, caracterizado pelo fato de que o membro em forma de cunha (602) tem duas superfícies inclinadas.
7. Acionador mecânico (60) de acordo com a reivindicação 6, caracterizado pelo fato de que as superfícies inclinadas são duas superfícies retas inclinadas opostas.
8. Acionador mecânico (60) de acordo com qualquer uma das reivindicações 4 a 7, caracterizado pelo fato de que o membro em forma de cunha (602) tem superfícies em cada extremidade de cada superfície inclinada que são substancialmente planas para a direção de deslocamento do membro em forma de cunha (602).
9. Acionador mecânico (60) de acordo com a reivindicação 8, caracterizado pelo fato de que o membro em forma de cunha (602) é móvel de uma primeira posição para uma segunda posição, e vice-versa, e a alavanca (604) estando em contato com as superfícies, em cada extremidade da superfície inclinada movida ao longo do pistão (601), quando o membro em forma de cunha (602) está na sua primeira e segunda posições respectivamente.
10. Acionador mecânico (60) de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que o membro em forma de cunha (602) está preso a uma estrutura (807) por cabos flexíveis.
11. Acionador mecânico (60) de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que a liga de memória de forma (603) é um fio.
12. Acionador mecânico (60) de acordo com a reivindicação 11, caracterizado pelo fato de que o fio de memória de forma estando fixo em uma extremidade no membro em forma de cunha (602), e/ou o fio de memória de forma estando enrolado ao redor de pelo menos uma parte do membro em forma de cunha (602) e as extremidades do fio de memória de forma estando presas em pontos fixos.
13. Acionador mecânico (60) de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que o ponto de acionamento de pistão (601) está localizado em relação ao ponto de rotação fixo (607) da alavanca (604) e a localização onde a alavanca (604) está em contato com o membro em forma de cunha (602) de modo a otimizar a precisão de movimento do pistão (601).
14. Acionador mecânico (60) de acordo com qualquer uma das reivindicações precedentes, caracterizado pelo fato de que o acionador mecânico (60) ainda compreende uma mola de retorno.
15. Acionador mecânico (60) de acordo com a reivindicação 14, caracterizado pelo fato de que a mola de retorno é um material elastomérico, e/ou é fabricada utilizando uma técnica de moldagem por injeção ou fundição.
16. Acionador mecânico (60) de acordo com a reivindicação 14 ou 15, caraterizado pelo fato de que a mola de retorno (605) está operativamente acoplada ao membro em forma de cunha (602), e age contra a força de um aliga de memória.
17. Acionador mecânico (60) de acordo com a reivindicação 14 ou 15, caracterizado pelo fato de que a mola de retorno (2004) está operativamente acoplada no pistão (2001), e atua para retornar o pistão (601) para a sua posição de partida.
18. Acionador mecânico (60) de acordo com a reivindicação 17, caracterizado pelo fato de que a mola de retorno (2004) sobre o pistão (2001) está tensionada quando o pistão (601) está na sua posição de partida.
19. Acionador mecânico (60) de acordo com a reivindicação 18, caracterizado pelo fato de que a mola de retorno (2004) forma uma membrana de bombeamento de uma microbomba (220).
20. Acionador mecânico (60) de acordo com a reivindicação 14 ou 15, caracterizado pelo fato de que a mola de retorno (1402) está operativamente acoplada na alavanca (1401), e atua para retornar a alavanca (604) para a sua posição de partida.
21. Acionador mecânico (60) de acordo com a reivindicação 20, caracterizado pelo fato de que a mola de retorno (2004) sobre a alavanca (604) está tensionada quando a alavanca (604) está na sua posição de partida.
22. Bomba caracterizada pelo fato de que compreende um acionador mecânico (60) como definido em qualquer uma das reivindicações precedentes.
23. Bomba de acordo com a reivindicação 22, caracterizada pelo fato de que se destina a bombear um produto terapêutico líquido compreendendo uma câmara de bombeamento que tem uma válvula de entrada e uma válvula de saída, onde um volume da câmara de bombeamento é modificado pela atuação do acionador mecânico (60).
24. Bomba de acordo com a reivindicação 22 ou 23, caracterizado pelo fato de que a bomba é incluída em um sistema de infusão.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1205459.9 | 2012-03-28 | ||
| GB1205459.9A GB2500646A (en) | 2012-03-28 | 2012-03-28 | Miniature mechanical driver for moving a reciprocating piston in a micro-pump |
| PCT/NL2013/050227 WO2013147602A2 (en) | 2012-03-28 | 2013-03-27 | Mechanical driver |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112014024293A2 BR112014024293A2 (pt) | 2017-06-20 |
| BR112014024293B1 true BR112014024293B1 (pt) | 2021-10-19 |
Family
ID=46087267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014024293-3A BR112014024293B1 (pt) | 2012-03-28 | 2013-03-27 | Acionador mecânico e bomba |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US9987418B2 (pt) |
| EP (2) | EP2877746B1 (pt) |
| CN (1) | CN104685210B (pt) |
| BR (1) | BR112014024293B1 (pt) |
| CA (2) | CA3038333C (pt) |
| GB (1) | GB2500646A (pt) |
| RU (1) | RU2619657C2 (pt) |
| WO (1) | WO2013147602A2 (pt) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105402881B (zh) * | 2015-10-29 | 2018-10-16 | 有研亿金新材料有限公司 | 一种记忆合金智能辅助运动装置 |
| GB201600232D0 (en) * | 2016-01-06 | 2016-02-17 | Vicentra B V | Fluid delivery system |
| GB201600234D0 (en) * | 2016-01-06 | 2016-02-17 | Vicentra B V | Shape memory actuator |
| GB201600236D0 (en) * | 2016-01-06 | 2016-02-17 | Vicentra B V | Fluid delivery system |
| US9907904B2 (en) | 2016-05-10 | 2018-03-06 | Burton H. Sage, Jr. | Spring-driven drug delivery device |
| WO2018041741A1 (en) | 2016-08-30 | 2018-03-08 | Sanofi-Aventis Deutschland Gmbh | Injection device |
| WO2019052110A1 (zh) * | 2017-09-12 | 2019-03-21 | 美敦力公司 | 流体输注装置及其驱动机构 |
| CN107469186B (zh) * | 2017-09-12 | 2019-08-16 | 美敦力公司 | 流体输注装置及其驱动机构 |
| CN108030483B (zh) * | 2017-12-06 | 2023-12-29 | 深圳市星河泉新材料有限公司 | 一种加压结构、血压检测模块以及血压智能检测设备 |
| CN110840465B (zh) * | 2019-11-30 | 2022-08-26 | 中国人民解放军陆军军医大学第一附属医院 | 一种自动回缩采血针 |
| GB2592002B (en) * | 2020-02-06 | 2022-04-20 | Cambridge Mechatronics Ltd | A shape memory alloy apparatus |
| CN113391502A (zh) * | 2020-03-11 | 2021-09-14 | 中强光电股份有限公司 | 调整模块及投影机 |
| GB202016814D0 (en) * | 2020-10-22 | 2020-12-09 | Cambridge Mechatronics Ltd | An actuator assembly |
| DE102022121829A1 (de) | 2022-03-02 | 2023-09-07 | Tangtring Seating Technology Inc. | Luftventil mit formgedächtnislegierung zum schalten |
| CN114721107A (zh) * | 2022-05-16 | 2022-07-08 | 上海信迈电子科技有限公司 | 光学元件驱动装置、摄像装置及移动终端 |
| US11982369B2 (en) | 2022-06-01 | 2024-05-14 | Tangtring Seating Technology Inc | Air valve structure |
| US11953114B2 (en) | 2022-06-01 | 2024-04-09 | Tangtring Seating Technology Inc. | Air valve with SMA for switching |
| GB2625829A (en) * | 2022-12-31 | 2024-07-03 | Cambridge Mechatronics Ltd | Actuator assembly |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1423783A1 (ru) | 1987-02-24 | 1988-09-15 | Военный Инженерный Краснознаменный Институт Им.А.Ф.Можайского | Объемный насос |
| US4935009A (en) * | 1988-06-10 | 1990-06-19 | Caldwell James B | Emergency drug injection system |
| FR2637370B1 (fr) * | 1988-10-04 | 1991-04-12 | Gir | Dispositif pour le controle de temperatures contenant au moins un element en alliage a memoire de forme |
| CN2138228Y (zh) | 1992-09-19 | 1993-07-14 | 上海钢铁研究所 | 防火阀用感温驱动器 |
| RU2055194C1 (ru) | 1992-11-02 | 1996-02-27 | Черноусов Василий Васильевич | Устройство для разрушения камня |
| US6162238A (en) * | 1999-02-24 | 2000-12-19 | Aaron V. Kaplan | Apparatus and methods for control of body lumens |
| US6361459B1 (en) | 2000-04-14 | 2002-03-26 | The Gates Corporation | Tensioner |
| FR2817604B1 (fr) * | 2000-12-01 | 2004-04-23 | Biomerieux Sa | Vannes activees par des polymeres electro-actifs ou par des materiaux a memoire de forme, dispositif contenant de telles vannes et procede de mise en oeuvre |
| US7052251B2 (en) * | 2002-04-22 | 2006-05-30 | Medtronic Minimed, Inc. | Shape memory alloy wire driven positive displacement micropump with pulsatile output |
| DE10219750C1 (de) * | 2002-05-02 | 2003-07-24 | Siemens Ag | Vorrichtung zur Zufuhr von fließfähigen oder pastösen Substanzen |
| US7753924B2 (en) * | 2003-09-04 | 2010-07-13 | Guided Delivery Systems, Inc. | Delivery devices and methods for heart valve repair |
| DE10240165A1 (de) * | 2002-08-30 | 2004-03-18 | Disetronic Licensing Ag | Vorrichtung zum dosierten Ausstoßen eines flüssigen Wirkstoffes und Infusionspumpe |
| US7144384B2 (en) * | 2002-09-30 | 2006-12-05 | Insulet Corporation | Dispenser components and methods for patient infusion device |
| DE202005011767U1 (de) * | 2005-05-26 | 2005-10-20 | Thomas Hilfen Hilbeg Gmbh & Co. Kg | Stimulationsaktor zur Bewegung von Auflageflächen |
| CN100418640C (zh) | 2005-07-25 | 2008-09-17 | 哈尔滨工业大学 | 由形状记忆合金驱动器驱动的活塞式喷液装置 |
| EP2000718A1 (en) * | 2007-06-04 | 2008-12-10 | Luxembourg Patent Company S.A. | Thermally activated pressure relief device with shape memory effect material |
| US7971651B2 (en) * | 2007-11-02 | 2011-07-05 | Chevron U.S.A. Inc. | Shape memory alloy actuation |
| GB0805521D0 (en) * | 2008-03-27 | 2008-04-30 | The Technology Partnership Plc | Dispensing system |
-
2012
- 2012-03-28 GB GB1205459.9A patent/GB2500646A/en not_active Withdrawn
-
2013
- 2013-03-27 RU RU2014143197A patent/RU2619657C2/ru not_active IP Right Cessation
- 2013-03-27 EP EP13717878.6A patent/EP2877746B1/en active Active
- 2013-03-27 EP EP18157725.5A patent/EP3348829B1/en active Active
- 2013-03-27 CA CA3038333A patent/CA3038333C/en active Active
- 2013-03-27 WO PCT/NL2013/050227 patent/WO2013147602A2/en active Application Filing
- 2013-03-27 BR BR112014024293-3A patent/BR112014024293B1/pt active IP Right Grant
- 2013-03-27 CN CN201380027523.9A patent/CN104685210B/zh active Active
- 2013-03-27 CA CA2868708A patent/CA2868708C/en active Active
- 2013-03-27 US US14/388,661 patent/US9987418B2/en active Active
-
2016
- 2016-11-23 US US15/359,914 patent/US10258739B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10258739B2 (en) | 2019-04-16 |
| EP3348829A2 (en) | 2018-07-18 |
| CA2868708C (en) | 2019-10-01 |
| CN104685210B (zh) | 2016-11-09 |
| US20170072137A1 (en) | 2017-03-16 |
| WO2013147602A2 (en) | 2013-10-03 |
| EP2877746A2 (en) | 2015-06-03 |
| WO2013147602A8 (en) | 2013-11-14 |
| GB2500646A (en) | 2013-10-02 |
| US9987418B2 (en) | 2018-06-05 |
| RU2619657C2 (ru) | 2017-05-17 |
| EP2877746B1 (en) | 2018-06-13 |
| EP3348829B1 (en) | 2020-09-23 |
| CA3038333C (en) | 2019-11-05 |
| CA3038333A1 (en) | 2013-10-03 |
| RU2014143197A (ru) | 2016-05-20 |
| CN104685210A (zh) | 2015-06-03 |
| US20150051547A1 (en) | 2015-02-19 |
| WO2013147602A3 (en) | 2015-01-22 |
| EP3348829A3 (en) | 2018-08-15 |
| CA2868708A1 (en) | 2013-10-03 |
| GB201205459D0 (en) | 2012-05-09 |
| BR112014024293A2 (pt) | 2017-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112014024293B1 (pt) | Acionador mecânico e bomba | |
| JP6445608B2 (ja) | 流体ネットワークにおける流体流れの生成 | |
| AU2007310635B2 (en) | Wax micro actuator | |
| Bußmann et al. | Microdosing for drug delivery application—A review | |
| US20220160304A1 (en) | Microrobot configured to move in a viscous material | |
| Kalyonov et al. | Valveless microfluidic pump based on IPMC actuator for drug delivery | |
| Neto et al. | Linear peristaltic pump driven by three magnetic actuators: Simulation and experimental results | |
| Prithvi et al. | Critical review and exploration on micro-pumps for microfluidic delivery | |
| Kim et al. | Fabrication, experiment, and simulation of a flexible microvalve-integrated microarm for microgrippers using electrorheological fluid | |
| Brenner et al. | Micro-actuation principles for high-resolution graphic tactile displays | |
| Arachchige et al. | Actuation for flexible and stretchable microdevices | |
| Ala'aldeen et al. | Development of a novel electromagnetic double action meso-scale pump | |
| BR102019012645A2 (pt) | microbomba peristáltica linear acionada por atuadores de liga com memória de forma | |
| Cui et al. | The study on MEMS-based micro pump technology | |
| Wang et al. | New type of micropump using SMA thin film actuator | |
| Trenkle | PMP-NC²-a normally-closed, backpressure independentperistaltic micropump featuring a modular setup | |
| Adamovic et al. | Microactuators for Fluidic Applications: Principles, Devices, and Systems | |
| Guo et al. | A novel type of micropump for biomedical application |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 27/03/2013, OBSERVADAS AS CONDICOES LEGAIS. |