WO2023199477A1 - Information processing system, mobile body, information processing method, and program - Google Patents
Information processing system, mobile body, information processing method, and program Download PDFInfo
- Publication number
- WO2023199477A1 WO2023199477A1 PCT/JP2022/017830 JP2022017830W WO2023199477A1 WO 2023199477 A1 WO2023199477 A1 WO 2023199477A1 JP 2022017830 W JP2022017830 W JP 2022017830W WO 2023199477 A1 WO2023199477 A1 WO 2023199477A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- dimensional
- data
- point cloud
- point group
- outside
- Prior art date
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 35
- 238000003672 processing method Methods 0.000 title claims description 4
- 230000033001 locomotion Effects 0.000 claims abstract description 69
- 239000011165 3D composite Substances 0.000 claims abstract description 43
- 238000007726 management method Methods 0.000 description 24
- 230000006870 function Effects 0.000 description 18
- 238000000034 method Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 7
- 238000004891 communication Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 238000001308 synthesis method Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 238000013500 data storage Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- JJWKPURADFRFRB-UHFFFAOYSA-N carbonyl sulfide Chemical compound O=C=S JJWKPURADFRFRB-UHFFFAOYSA-N 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000004297 night vision Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G9/00—Traffic control systems for craft where the kind of craft is irrelevant or unspecified
Definitions
- the present invention relates to an information processing system, a mobile object, an information processing method, and a program.
- flying objects such as drones and unmanned aerial vehicles (UAVs), and running objects such as unmanned ground vehicles (UGVs)
- UAVs unmanned aerial vehicles
- UUVs unmanned ground vehicles
- Possible mobile objects are beginning to be used in industry.
- Patent Document 1 discloses a system in which a flying object sequentially photographs an object at a plurality of preset waypoints.
- Patent Document 1 uses GNSS (global navigation satellite system) outdoors for self-position estimation, and creates a movement route for a mobile body based on latitude and longitude information, which is difficult to use when moving indoors. A similar method cannot be used for the movement path of the body.
- GNSS global navigation satellite system
- a technique such as Visual SLAM (Simultaneous Localization and Mapping) is used to manually control the movement of a moving object.
- One possible method is to obtain three-dimensional indoor information in advance based on sensor information from a sensor installed in the vehicle, and then allow the user to set a travel route based on this information.
- the methods for creating outdoor travel routes and the methods for creating indoor travel routes are different, and the desire to create flight routes that span inside and outside of structures has not been sufficiently studied. .
- the present invention was made in view of this background, and an object of the present invention is to provide an information processing system and the like that can set a travel route for an autonomous mobile body, including a travel route that spans inside and outside of a structure.
- the main invention of the present invention for solving the above problems is to provide three-dimensional structure internal point cloud data indicating at least the arrangement of components inside the structure, and three-dimensional structure internal point cloud data indicating at least the arrangement of the components outside the structure.
- a three-dimensional composite point cloud data generation unit that generates three-dimensional composite point cloud data by compositing the original structure external point cloud data with each other;
- a moving route generation unit that generates moving route information indicating a moving route that spans inside and outside of an object.
- an information processing system and the like that can set a travel route for an autonomous mobile body, including a travel route that spans inside and outside of a structure.
- FIG. 1 is a diagram showing the configuration of an information processing system according to an embodiment of the present invention.
- FIG. 2 is a block diagram showing the hardware configuration of the management server in FIG. 1.
- FIG. 2 is a block diagram showing the hardware configuration of the user terminal in FIG. 1.
- FIG. 2 is a block diagram showing the hardware configuration of the aircraft shown in FIG. 1.
- FIG. 2 is a block diagram showing the functions of each component in FIG. 1.
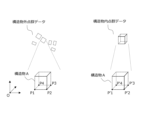
- FIG. FIG. 3 is a diagram illustrating the association of point group data outside the structure and point group data inside the structure according to the embodiment of the present invention. 3 is a flowchart of a travel route generation method according to an embodiment of the present invention.
- An information processing system etc. has the following configuration.
- the three-dimensional structure internal point cloud data is point cloud data in which at least the model surface of the three-dimensional structure internal model data indicating at least the arrangement of components inside the structure is formed into a point cloud.
- the three-dimensional structure internal model data is BIM data or CIM data.
- the information processing system characterized in that: [Item 4]
- the point cloud data outside the three-dimensional structure is point cloud data in which at least the model surface of the three-dimensional outside structure model data indicating at least the arrangement of components outside the structure is converted into a point cloud.
- the information processing system according to any one of items 1 to 3, characterized in that: [Item 5]
- the three-dimensional structure external model data is CityGML data,
- the information processing system characterized in that: [Item 6] At least one of the point group data inside the three-dimensional structure and the point group data outside the three-dimensional structure is point group data obtained by moving a sensor within the structure in advance.
- the information processing system characterized in that: [Item 7] At least one of the three-dimensional structure internal point group data and the three-dimensional structure external point group data is point group data obtained by moving a virtual sensor within the corresponding three-dimensional structure model data.
- the information processing system characterized in that: [Item 8] Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other.
- the three-dimensional composite point cloud data generation unit generates three-dimensional structure internal point cloud data indicating at least the arrangement of components inside the structure, and three-dimensional structure external point cloud data indicating at least the arrangement of components outside the structure.
- a 3D composite point cloud data generation function that generates 3D composite point cloud data, a travel route generation function that generates travel route information indicating a travel route for a mobile object that spans inside and outside of the structure based on the three-dimensional composite point group data;
- the information processing system includes a management server 1, one or more user terminals 2, and one or more mobile objects 4 (for example, a flying object, a traveling object, etc.). It has the above mobile object storage device 5.
- the management server 1, the user terminal 2, the mobile object 4, and the mobile object storage device 5 are connected to each other via a network so that they can communicate with each other.
- the illustrated configuration is an example, and is not limited to this. For example, a configuration that does not include the movable body storage device 5 and is carried by the user may be used.
- FIG. 2 is a diagram showing the hardware configuration of the management server 1. Note that the illustrated configuration is an example, and other configurations may be used.
- a management server 1 is connected to a user terminal 2, a mobile object 4, and a mobile object storage device 5, and constitutes a part of this system.
- the management server 1 may be a general-purpose computer such as a workstation or a personal computer, or may be logically realized by cloud computing.
- the management server 1 includes at least a processor 10, a memory 11, a storage 12, a transmitting/receiving section 13, an input/output section 14, etc., which are electrically connected to each other via a bus 15.
- the processor 10 is an arithmetic device that controls the overall operation of the management server 1, controls the transmission and reception of data between each element, and performs information processing necessary for application execution and authentication processing.
- the processor 10 is a CPU (Central Processing Unit) and/or a GPU (Graphics Processing Unit), and executes programs for this system stored in the storage 12 and developed in the memory 11 to perform various information processing. .
- the memory 11 includes a main memory configured with a volatile storage device such as a DRAM (Dynamic Random Access Memory), and an auxiliary memory configured with a non-volatile storage device such as a flash memory or an HDD (Hard Disc Drive). .
- the memory 11 is used as a work area for the processor 10, and also stores a BIOS (Basic Input/Output System) executed when the management server 1 is started, various setting information, and the like.
- BIOS Basic Input/Output System
- the storage 12 stores various programs such as application programs.
- a database storing data used for each process may be constructed in the storage 12.
- the transmitting/receiving unit 13 connects the management server 1 to the network.
- the transmitting/receiving unit 13 may include a short-range communication interface of Bluetooth (registered trademark) and BLE (Bluetooth Low Energy).
- the input/output unit 14 is information input devices such as a keyboard and mouse, and output devices such as a display.
- the bus 15 is commonly connected to each of the above elements and transmits, for example, address signals, data signals, and various control signals.
- the user terminal 2 shown in FIG. 3 also includes a processor 20, a memory 21, a storage 22, a transmitting/receiving section 23, an input/output section 24, etc., which are electrically connected to each other through a bus 25. Since the functions of each element can be configured in the same manner as the management server 1 described above, a detailed explanation of each element will be omitted.
- the user terminal 2 is, for example, an information processing device such as a personal computer or a tablet terminal, but may also be configured by a smartphone, a mobile phone, a PDA, or the like.
- the input/output unit 24 is composed of a display, a keyboard, and a mouse when the user terminal 2 is composed of a personal computer, and is composed of a touch panel etc. when the user terminal 2 is composed of a smartphone or a tablet terminal. Ru.
- the moving object 4 is a known moving object including a flying object such as a drone or an unmanned aerial vehicle, a running object such as an unmanned ground vehicle, and is particularly a moving object that can be autonomously controlled.
- a flying object such as a drone or an unmanned aerial vehicle
- a running object such as an unmanned ground vehicle
- FIG. 4 is a block diagram showing the hardware configuration of the flying object 4.
- Flight controller 41 may include one or more processors, such as a programmable processor (eg, a central processing unit (CPU)).
- the flight controller 41 has a memory 411 and can access the memory.
- Memory 411 stores logic, code, and/or program instructions executable by the flight controller to perform one or more steps.
- the flight controller 41 may include sensors 412 such as an inertial sensor (acceleration sensor, gyro sensor), a GPS sensor, a proximity sensor (eg, lidar), and the like.
- the memory 411 may include, for example, a separable medium or external storage device such as an SD card or random access memory (RAM). Data acquired from cameras/sensors 42 may be communicated directly to and stored in memory 411. For example, still image/video data taken with a camera etc. may be recorded in the built-in memory or external memory, but is not limited to this. It may be recorded in either the user terminal 2 or the mobile storage device 5.
- the camera 42 may be installed on the flying object 4 via a gimbal 43.
- Flight controller 41 includes a control module (not shown) configured to control the state of the aircraft.
- the control module may be configured to adjust the spatial position, velocity, and/or acceleration of an air vehicle with six degrees of freedom (translational motion x, y, and z, and rotational motion ⁇ x , ⁇ y , and ⁇ z ).
- the propulsion mechanism (motor 45, etc.) of the aircraft via an ESC 44 (Electric Speed Controller).
- a propeller 46 is rotated by a motor 45 supplied with power from a battery 48, thereby generating lift of the flying object.
- the control module can control one or more of the states of the mounting section and sensors.
- Flight controller 41 also transmits and/or transmits data to one or more external devices (e.g., transceiver 49, management server 1, user terminal 2, display device, or other remote controller). Alternatively, it can communicate with a transmitter/receiver 47 configured to be able to receive data from an external device.
- Transceiver 49 may use any suitable communication means, such as wired or wireless communication.
- the flight controller 41 not only functions to control the state of the flying object, such as controlling the state of the flying object described above, but also executes application programs in response to instructions from external devices (particularly the user terminal 2).
- various functions related to data processing may be realized, for example, functions corresponding to a movement route generation section 420 and a movement instruction section 430, which will be described later, may be executed.
- the flight controller 41 may have a function related to data processing so that it can be used for both the mobile object state control function and the data processing function, but instead of this, a separate processor (control unit) dedicated to the data processing function may be provided. You can also do this.
- the transmitter/receiver 47 uses, for example, one or more of a local area network (LAN), wide area network (WAN), infrared rays, wireless, WiFi, point-to-point (P2P) network, telecommunications network, cloud communication, etc. can do.
- LAN local area network
- WAN wide area network
- infrared rays wireless
- WiFi point-to-point
- P2P point-to-point
- telecommunications network telecommunications network
- cloud communication etc.
- the transmitting/receiving unit 47 transmits and/or transmits one or more of data acquired by the camera/sensors 42, processing results generated by the flight controller 41, predetermined control data, user commands from a terminal or remote controller, etc. or can be received.
- the cameras/sensors 42 include an inertial sensor (acceleration sensor, gyro sensor), a GPS sensor, a proximity sensor (for example, LiDAR (Light Detection And Ranging), etc.), or a vision/image sensor (for example, a camera). may include.
- FIG. 5 is a block diagram illustrating functions implemented in the user terminal 2. As shown in FIG. In an embodiment of the present invention, at least a point group indicating the arrangement of internal components (e.g., inner walls, columns, ceilings, windows, doors, stairs, internal equipment, etc.) of a structure (e.g., a building such as a building) is included.
- internal components e.g., inner walls, columns, ceilings, windows, doors, stairs, internal equipment, etc.
- a structure e.g., a building such as a building
- Point cloud data inside a three-dimensional structure and at least structures outside the structure (e.g., external walls, roofs, windows, doors, stairs, external equipment, roads, railways, stations, street lights, bus stops, bridges, tunnels, topography) It has various functional units to generate three-dimensional composite point cloud data by compositing three-dimensional structure external point cloud data including point clouds indicating the arrangement of plants, vegetation, water bodies, etc.). Note that some or all of the various functional units may be realized by an information processing device (processor, control unit) installed in at least one of the management server 1 and the mobile body 4.
- an information processing device processor, control unit
- the user terminal 2 includes a communication section 210, a three-dimensional structure point cloud data generation section 220, a three-dimensional composite point cloud data generation section 230, and a storage section 270. Furthermore, the storage unit 270 includes various databases such as a three-dimensional data storage unit 271.
- the communication unit 210 communicates with the management server 1, the mobile body 4, and the mobile body storage device 5.
- the communication unit 210 also functions as a reception unit that receives various requests, data, etc. from the management server 1, the mobile unit 4, and the mobile unit storage device 5.
- the three-dimensional structure point cloud data generation unit 220 generates three-dimensional structure internal model data indicating at least the arrangement of components inside the structure, and three-dimensional structure external model data indicating at least the arrangement of components outside the structure. , three-dimensional structure internal point group data and three-dimensional structure external point group data are generated by converting at least the model surface into a point group.
- Each 3D model data (model data inside a 3D structure, model data outside a 3D structure, etc.), each 3D point cloud data (point group data inside a 3D structure, point group data outside a 3D structure, etc.) are data expressed in a three-dimensional coordinate system, and are stored in the three-dimensional data storage unit 271 by being read from the management server 1 or the mobile object 4, created by an application on the user terminal 2, etc. managed.
- the three-dimensional structure internal model data may be any type of three-dimensional structural internal model data that indicates at least the arrangement of components within the structure and has dimensional information.
- -Aided Design A model created based on data created with design software, including BIM (Building Information Modeling) data, CIM (Construction Information Modeling) data, and CAD data. , reconstructed from BIM data, etc. It may be three-dimensional model data or the like, or it may be three-dimensional model data obtained by generating a structure having a predetermined height based on two-dimensional blueprint data.
- the three-dimensional structure internal model data indicates the arrangement of the components inside the structure, but it does not necessarily have to indicate the arrangement of only the components inside the structure; for example, It may also include the arrangement of components outside the structure related to the structure, such as an outer wall.
- reconstruction of the three-dimensional model data, etc. may be executed in the processor of the management server 1 or the user terminal 2, or may be executed outside the management server 1 or the user terminal 2 and acquired into the inside.
- the three-dimensional structure internal model data can be data expressed by a three-dimensional orthogonal coordinate system with an arbitrary set point as the origin (reference point), but for example, the horizontal direction is latitude and longitude coordinates,
- the data may be expressed by a three-dimensional coordinate system in which the vertical direction is the altitude coordinate, but this is not necessarily the case.
- the three-dimensional outside-structure model data may be any type of three-dimensional outside-structure model data that indicates at least the arrangement of components outside the structure and has dimensional information, but in particular data on the ground surface and on the ground surface. It is preferable that the model includes a model that virtually represents the surface shape of at least a part of the structure in a three-dimensional three-dimensional space, for example, three-dimensional city model data such as CityGML (Generalized Markup Language), CityJson, GeoTIFF, etc. It may also be three-dimensional city model data stored in a three-dimensional city model database outside this system.
- the three-dimensional external structure model data may be data expressed by a three-dimensional coordinate system in which the horizontal direction is latitude and longitude coordinates and the vertical direction is altitude coordinates.
- the method for generating three-dimensional point cloud model data (point cloud data inside a three-dimensional structure, point cloud data outside a three-dimensional structure, etc.) by the three-dimensional structure point cloud data generation unit 220 is to generate a structure from the three-dimensional model data described above. Any method can be used as long as it is possible to generate three-dimensional point cloud model data that is a point cloud of model surfaces related to components inside or outside the structure.
- Three-dimensional point cloud model data regarding components inside or outside the structure is generated by moving a virtual moving body 4 equipped with a virtual sensor (for example, virtual LiDAR) inside or outside the structure. You may.
- 3D point cloud model data As a result, it is theoretically possible to generate point cloud data close to point cloud sensing data obtained when the inside or outside of the structure is actually measured using the sensor of the moving body 4.
- Other methods of generating 3D point cloud model data include forming 3D model data into a point cloud evenly at predetermined intervals, or if the 3D model data is polygon data, points are placed at each vertex. may be arranged to form a point cloud, or may be formed into a point cloud using a known point cloud technology (conversion technology to point cloud data).
- the three-dimensional composite point cloud data generation unit 230 may generate three-dimensional composite point cloud data by combining the three-dimensional structure internal point cloud data and the three-dimensional structure external point cloud data.
- the three-dimensional structure internal point cloud data and the three-dimensional structure external point cloud data may be three-dimensional point cloud data generated by the three-dimensional structure point cloud data generation unit 220 as described above, or three-dimensional point cloud data
- At least one of the original point cloud data inside the structure and the point cloud data outside the three-dimensional structure is three-dimensional point cloud data obtained by moving a moving body 4 equipped with a sensor (for example, a LiDAR sensor) in advance. It's okay.
- the method of generating three-dimensional point cloud data by the three-dimensional composite point cloud data generation unit 230 may be any method as long as it can be synthesized.
- the two may be aligned (and scaled) based on the above, and the three-dimensional point cloud data of both may be combined as an integrated three-dimensional composite point cloud data at the determined position, or using known point cloud composition techniques.
- the three-dimensional point group data may be combined with each other using .
- the synthesis method differs depending on whether the point group data inside the three-dimensional structure is expressed in the latitude/longitude/height coordinate system like the point group data outside the three-dimensional structure.
- the three-dimensional composite point group data may be converted in advance to a three-dimensional orthogonal reference coordinate system having a predetermined reference point in the virtual space as the origin.
- the management server 1, the user terminal 2, or the moving body 4 is equipped with a coordinate conversion unit 240 that performs the conversion, and converts the position information of the moving body 4 acquired within the structure into latitude, longitude, and height coordinates. You can do it like this.
- the point cloud data inside the three-dimensional structure and the point cloud data outside the three-dimensional structure are not in a common three-dimensional coordinate system (for example, the point cloud data inside the three-dimensional structure is
- the point cloud data inside the three-dimensional structure is
- the point cloud data inside the three-dimensional structure and the point cloud data outside the three-dimensional structure are Set the corresponding points at ).
- the corresponding points may be, for example, the four corners of the first floor (ground surface) of a building such as a square building, or may be characteristic points on the floor of another structure.
- the corresponding point is not limited to the floor surface, and may be any characteristic point.
- the corresponding points may be set manually on the user terminal 2 based on user operations, or automatically based on shape analysis technology in a known structure model or corner point detection technology in a point cloud model. May be set.
- the corresponding points P1 to P4 of the point group data outside the structure are converted into coordinate values expressed in a three-dimensional orthogonal coordinate system with the reference point O as the origin, and both corresponding points are By determining the positional relationship information (coordinate transformation information) that minimizes the distance between the Combine both 3D point cloud data.
- the positional relationship information of both three-dimensional point cloud data can be obtained, if necessary, the point cloud data inside the structure can be changed to the latitude, longitude, and height coordinate system based on the latitude, longitude, and height coordinate system of the point cloud data outside the structure.
- the coordinates of the system may also be given.
- the corresponding points may be set on the three-dimensional model data, and the corresponding point data may be set again as the corresponding points after point cloud formation.
- both the corresponding points are not necessarily the same.
- the positions may not be approximate.
- corresponding points are set with the inner wall as a reference in the 3D structure internal point cloud data, and corresponding points are set with the outer wall as the reference in the 3D structure external point cloud data, then at both corresponding points, There will be a shift and the positions will not be the same or similar. Therefore, after setting multiple corresponding points in the point cloud data inside the 3D structure and the point cloud data outside the 3D structure, the center of gravity is calculated, and the center of gravity is set as the corresponding point to combine both 3D point cloud data.
- Positional relationship information may be determined by matching. Furthermore, based on the corresponding points that target the floor surface, etc. (hereinafter referred to as “first corresponding points”) and the corresponding points that correspond to the center of gravity (hereinafter referred to as “second corresponding points”), Positional relationship information may be obtained by matching three-dimensional point cloud data, and in particular, positional relationship information is determined by weighting which degree of matching is given priority between the first corresponding point and the second corresponding point using a weighting coefficient. You may also ask for In view of the possibility that the above-mentioned deviation may occur, the weighting may be such that the weighting for the second corresponding point is greater than the weighting for the first corresponding point.
- the three-dimensional structure internal point cloud data and the three-dimensional structure external point cloud data which are different from each other, are synthesized and the three-dimensional composite point cloud data indicating the arrangement of components inside and outside the structure is converted into unified three-dimensional coordinates. It becomes possible to express it by a system. As a result, for example, when waypoints are set based on three-dimensional composite point cloud data displayed on the user terminal 2, even if the travel route straddles the inside and outside of a structure, a unified three-dimensional It becomes possible to specify positions such as generating travel routes based on the original coordinate system.
- FIG. 5 is a block diagram further illustrating functions implemented in the mobile body 4.
- movement route information for the moving body spanning inside and outside the structure is generated, and the moving body 4 is instructed to move on the movement route.
- It has various functional parts for this purpose. Note that some or all of the various functional units may be realized by an information processing device (processor, control unit) installed in at least one of the management server 1 and the user terminal 2.
- the moving body 4 includes a movement route generation section 420, a movement instruction section 430, a coordinate conversion section 440, and a storage section 470.
- the storage unit 470 includes various databases such as a travel route information storage unit 471 and a travel information storage unit 472.
- the movement route generation unit 420 sequentially generates one or more waypoint information from a start point to an end point, or generates arbitrary points based on the user's selection operation on the three-dimensional composite point group data displayed on the user terminal 2.
- the waypoint information may be set in an arbitrary order, and travel route information may be generated by a known method based on the waypoint information, and stored and managed in the travel route information storage unit 471, or three-dimensional composite point cloud data for example, calculates a travel route in which waypoint information that can obtain information on specific or all components within the structure is set, and stores this as travel route information in the travel route information storage unit 471, It may also be managed.
- the movement route may be generated, for example, by setting the position of the moving body storage device 5 as the movement start position and the movement end position, and passing through each waypoint, or conversely, Alternatively, the configuration may be such that the position where the aircraft is carried by the user is set as the movement start position, or the user collects the aircraft at the movement end position.
- the mobile body storage device 5 managed in the storage unit of the mobile body storage device 5 the mobile body storage device 5 selected as the movement start position or movement end position is It may also be configured to be generated as a movement route including the location.
- the movement instruction unit 430 refers to the movement route information stored in the movement route information storage unit 471 and transmits a signal instructing the movement of the mobile body 4 to the mobile body 4 according to the coordinates indicated by the movement route information. Further, the movement instruction unit 430 uses the coordinate conversion unit 440 (which may have the same function as the coordinate conversion unit 240) to convert, for example, the movement route information stored in the movement route information storage unit 471 and the above-mentioned positional relationship information. (coordinate conversion information) and convert the coordinates indicated by the movement route information into a three-dimensional orthogonal coordinate system (for example, the three-dimensional orthogonal reference coordinate system mentioned above) used to control the movement of the moving object 4. It may be configured to instruct movement of the body 4.
- the movement information storage unit 472 stores parameters used when the movement route generation unit 420 generates a movement route, the movement instruction unit 430 instructs the autonomously controlled moving body 4 to move on the movement route, etc. It stores information, information acquired during movement, etc. acquired on the movement route. Examples of specific parameters include moving speed, flight altitude (if the moving object 4 is a flying object), overlap rate of captured images, information acquired during movement (for example, image information, video information, etc.), etc. including.
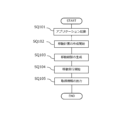
- FIG. 7 illustrates a flowchart of the movement route generation method according to the present embodiment.
- this flowchart exemplarily shows a configuration in which an application is started on the user terminal 2, the configuration is not limited to this.
- the configuration may include an input/output device and allow various settings and the like.
- the user starts an application including a three-dimensional composite point cloud data generation function, for example on the user terminal 2 (SQ101).
- This application may be stored in the user terminal 2, for example, or may be software (so-called SaaS) provided from the management server 1 or another server (not shown) connected via a network.
- SaaS software
- a login screen may be displayed as necessary, and a configuration may be adopted in which, for example, a login ID and password are requested.
- the user creates a new travel plan (SQ102). For example, you can set the "plan name”, “area name”, “address”, etc., acquire and display the 3D composite point cloud data within the target structure on the user terminal 2, and create a new movement. Start creating a plan.
- the user generates a travel route for the movement of the mobile object 4 (SQ103).
- one or more waypoint information (for example, expressed in the latitude and longitude coordinate system on the user terminal 2) is set by the user's selection operation for the three-dimensional composite point cloud data displayed on the user terminal 2.
- the three-dimensional composite point cloud data and waypoint information are transmitted to the mobile body 4, and the mobile body 4 uses a known method (for example, between each of the four waypoints) based on the three-dimensional composite point cloud data and the waypoint information. (Connecting with a straight line), movement route information is generated.
- the user instructs the moving body 4 to start moving (SQ104).
- the moving body 4 For example, with reference to the movement route information storage section 471 and the movement information storage section 472, movement of the mobile object 4 for purposes such as inspection, security, construction progress management, etc. is executed.
- the user instructs the user terminal 2 to output the acquired information (SQ105).
- the acquired information (still images, moving images, audio, and other information) acquired by the mobile object 4 on the movement route can be displayed, and the positions associated with the position information of the acquired information (especially waypoints) can be displayed.
- a mark such as a symbol that serves as a link for viewing acquired information corresponding to location information) may also be attached. Then, by selecting the link on the user terminal 2, the corresponding acquired information may be displayed.
- the present invention can provide an information processing system and the like that can set a travel route for an autonomous mobile body, including a travel route that spans inside and outside of a structure.
- a travel route for an autonomous mobile body including a travel route that spans inside and outside of a structure.
- the mobile object 4 may be configured to simply create an optimal movement route and display it on the user terminal 2 for confirmation. Based on this, it becomes possible to display on the user terminal 2 of another user a movement route that serves as a model for when another user manually moves the mobile object 4 within the structure using a radio or the like.
- the acquisition of information inside and outside the structure by the moving object 4 was taken as a specific example, but it may also be an inspection of the structure, and the presence or absence of a predetermined event on the inner wall and/or outer wall of the structure may be used. It may also be equipped with equipment, equipment, etc. used for inspecting. More specifically, imaging devices (visible light cameras, infrared cameras, metal detectors, ultrasonic measuring devices, etc.), keying devices, detection devices (metal detectors), sound collection devices, odor measuring devices, gas detection devices, etc. All devices necessary to know the condition of a structure to be inspected having an inner wall or an outer wall, such as an air contamination measuring device, a detection device (device for detecting cosmic rays, radiation, electromagnetic waves, etc.), etc., can be employed.
- the embodiment may be, for example, security or monitoring inside a structure, and may include devices, equipment, etc. used for security or monitoring. More specifically, structures to be guarded and monitored, such as imaging devices (visible light cameras, infrared cameras, night vision cameras, metal detectors, ultrasonic measuring instruments, etc.) and sensor devices (motion sensors, infrared sensors, etc.) All devices necessary to image and detect abnormalities, intruders, etc. can be employed.
- imaging devices visible light cameras, infrared cameras, night vision cameras, metal detectors, ultrasonic measuring instruments, etc.
- sensor devices motion sensors, infrared sensors, etc.
- the mobile object of the present invention can be suitably used as a mobile object for photographing equipped with a camera, etc., and can also be used in the security field, infrastructure monitoring, surveying, and in buildings and structures such as sports venues, factories, warehouses, etc. It can also be used in various industries such as inspection and disaster response.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Processing Or Creating Images (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
[Problem] To provide an information processing system and the like that make it possible to set a movement path for an autonomous mobile body that includes a movement path that spans the inside and outside of a structure. [Solution] This information processing system comprises: a three-dimensional composite point group data generation unit that generates three-dimensional composite point group data by combining three-dimensional structure interior point group data that indicates at least the arrangement of things inside a structure and three-dimensional structure exterior point group data that indicates at least the arrangement of things outside the structure; and a movement path generation unit that, on the basis of the three-dimensional composite point group data, generates movement path information that indicates a movement path for a mobile body that spans the inside and outside of the structure.
Description
本発明は、情報処理システム及び移動体、情報処理方法、プログラムに関する。
The present invention relates to an information processing system, a mobile object, an information processing method, and a program.
近年、ドローン(Drone)や無人航空機(UAV:Unmanned Aerial Vehicle)などの飛行体(以下、「飛行体」と総称する)や無人地上車両(UGV:Unmanned Ground Vehicle)などの走行体などの自律制御可能な移動体が産業に利用され始めている。こうした中で、特許文献1には、飛行体が予め設定された複数のウェイポイントにおいて撮影対象を順次撮影するシステムが開示されている。
In recent years, autonomous control of flying objects (hereinafter collectively referred to as "flying objects") such as drones and unmanned aerial vehicles (UAVs), and running objects such as unmanned ground vehicles (UGVs) has been increasing. Possible mobile objects are beginning to be used in industry. Under these circumstances, Patent Document 1 discloses a system in which a flying object sequentially photographs an object at a plurality of preset waypoints.
しかしながら、上記特許文献1の開示技術は、屋外においてGNSS(global navigation satellite system)を自己位置推定に使用し、緯度経度情報に基づいて移動体の移動経路を作成するものであり、屋内での移動体の移動経路においては同様の手法を用いることができない。
However, the technology disclosed in Patent Document 1 uses GNSS (global navigation satellite system) outdoors for self-position estimation, and creates a movement route for a mobile body based on latitude and longitude information, which is difficult to use when moving indoors. A similar method cannot be used for the movement path of the body.
また、屋内(例えば建物等の構造物内)での移動体の移動経路を生成する場合には、例えばVisual SLAM(Simultaneous Localization and Mapping)等の技術を用いて、手動で移動制御される移動体に搭載されたセンサのセンサ情報に基づき、屋内の3次元情報を予め取得し、これに基づいてユーザが移動経路の設定作業を行う方法が考えられる。しかしながら、屋外の移動経路の作成手法と屋内の移動経路の作成手法は別個のものであり、構造物の内外で跨る飛行経路を作成したいという要望については、十分に検討されているとはいえない。
In addition, when generating a movement route for a moving object indoors (for example, inside a structure such as a building), a technique such as Visual SLAM (Simultaneous Localization and Mapping) is used to manually control the movement of a moving object. One possible method is to obtain three-dimensional indoor information in advance based on sensor information from a sensor installed in the vehicle, and then allow the user to set a travel route based on this information. However, the methods for creating outdoor travel routes and the methods for creating indoor travel routes are different, and the desire to create flight routes that span inside and outside of structures has not been sufficiently studied. .
本発明はこのような背景を鑑みてなされたものであり、構造物内外に跨る移動経路を含む自律移動の移動体の移動経路を設定可能な情報処理システム等を提供することを目的とする。
The present invention was made in view of this background, and an object of the present invention is to provide an information processing system and the like that can set a travel route for an autonomous mobile body, including a travel route that spans inside and outside of a structure.
上記課題を解決するための本発明の主たる発明は、少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成部と、前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える。
The main invention of the present invention for solving the above problems is to provide three-dimensional structure internal point cloud data indicating at least the arrangement of components inside the structure, and three-dimensional structure internal point cloud data indicating at least the arrangement of the components outside the structure. a three-dimensional composite point cloud data generation unit that generates three-dimensional composite point cloud data by compositing the original structure external point cloud data with each other; A moving route generation unit that generates moving route information indicating a moving route that spans inside and outside of an object.
本発明によれば、特に、構造物内外に跨る移動経路を含む自律移動の移動体の移動経路を設定可能な情報処理システム等を提供することができる。
According to the present invention, in particular, it is possible to provide an information processing system and the like that can set a travel route for an autonomous mobile body, including a travel route that spans inside and outside of a structure.
本発明の実施形態の内容を列記して説明する。本発明の実施の形態による情報処理システム等は、以下のような構成を備える。
[項目1]
少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成部と、
前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える、
ことを特徴とする情報処理システム。
[項目2]
前記三次元構造物内部点群データは、少なくとも構造物内部の構成物の配置を示す三次元構造物内モデルデータの少なくともモデル表面が点群化された点群データである、
ことを特徴とする項目1に記載の情報処理システム。
[項目3]
前記三次元構造物内モデルデータは、BIMデータまたはCIMデータである、
ことを特徴とする項目2に記載の情報処理システム。
[項目4]
前記三次元構造物外点群データは、少なくとも構造物外部の構成物の配置を示す三次元構造物外モデルデータの少なくともモデル表面が点群化された点群データである、
ことを特徴とする項目1ないし3のいずれかに記載の情報処理システム。
[項目5]
前記三次元構造物外モデルデータは、CityGMLデータである、
ことを特徴とする項目4に記載の情報処理システム。
[項目6]
前記三次元構造物内部点群データ及び前記三次元構造物外点群データの少なくともいずれかは、事前に前記構造物内でセンサを移動させて取得された点群データである、
ことを特徴とする項目1に記載の情報処理システム。
[項目7]
前記三次元構造物内部点群データ及び前記三次元構造物外点群データの少なくともいずれかは、対応する三次元構造物モデルデータ内で仮想センサを移動させて取得された点群データである、
ことを特徴とする項目1に記載の情報処理システム。
[項目8]
少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して生成された三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える、
ことを特徴とする移動体。
[項目9]
三次元合成点群データ生成部により、少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成するステップと、
移動経路生成部により、前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成するステップと、
をコンピュータに実行させることを特徴とする情報処理方法。
[項目10]
少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成機能と、
前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成機能と、
をコンピュータに実現することを特徴とするプログラム。 The contents of the embodiments of the present invention will be listed and explained. An information processing system etc. according to an embodiment of the present invention has the following configuration.
[Item 1]
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. a three-dimensional composite point cloud data generation unit that generates three-dimensional composite point cloud data;
a moving route generation unit that generates moving route information indicating a moving route for a moving body that spans inside and outside of the structure based on the three-dimensional composite point group data;
An information processing system characterized by:
[Item 2]
The three-dimensional structure internal point cloud data is point cloud data in which at least the model surface of the three-dimensional structure internal model data indicating at least the arrangement of components inside the structure is formed into a point cloud.
The information processing system according toitem 1, characterized in that:
[Item 3]
The three-dimensional structure internal model data is BIM data or CIM data.
The information processing system according toitem 2, characterized in that:
[Item 4]
The point cloud data outside the three-dimensional structure is point cloud data in which at least the model surface of the three-dimensional outside structure model data indicating at least the arrangement of components outside the structure is converted into a point cloud.
The information processing system according to any one ofitems 1 to 3, characterized in that:
[Item 5]
The three-dimensional structure external model data is CityGML data,
The information processing system according toitem 4, characterized in that:
[Item 6]
At least one of the point group data inside the three-dimensional structure and the point group data outside the three-dimensional structure is point group data obtained by moving a sensor within the structure in advance.
The information processing system according toitem 1, characterized in that:
[Item 7]
At least one of the three-dimensional structure internal point group data and the three-dimensional structure external point group data is point group data obtained by moving a virtual sensor within the corresponding three-dimensional structure model data.
The information processing system according toitem 1, characterized in that:
[Item 8]
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. a movement path generation unit that generates movement path information indicating a movement path for a moving object that spans inside and outside of the structure, based on the generated three-dimensional composite point group data;
A mobile object characterized by:
[Item 9]
The three-dimensional composite point cloud data generation unit generates three-dimensional structure internal point cloud data indicating at least the arrangement of components inside the structure, and three-dimensional structure external point cloud data indicating at least the arrangement of components outside the structure. a step of composing the point cloud data with each other to generate three-dimensional composite point cloud data;
a step of generating movement path information indicating a movement path for the mobile body spanning inside and outside of the structure, based on the three-dimensional composite point group data, by a movement path generation unit;
An information processing method characterized by causing a computer to execute.
[Item 10]
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. A 3D composite point cloud data generation function that generates 3D composite point cloud data,
a travel route generation function that generates travel route information indicating a travel route for a mobile object that spans inside and outside of the structure based on the three-dimensional composite point group data;
A program characterized by realizing this on a computer.
[項目1]
少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成部と、
前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える、
ことを特徴とする情報処理システム。
[項目2]
前記三次元構造物内部点群データは、少なくとも構造物内部の構成物の配置を示す三次元構造物内モデルデータの少なくともモデル表面が点群化された点群データである、
ことを特徴とする項目1に記載の情報処理システム。
[項目3]
前記三次元構造物内モデルデータは、BIMデータまたはCIMデータである、
ことを特徴とする項目2に記載の情報処理システム。
[項目4]
前記三次元構造物外点群データは、少なくとも構造物外部の構成物の配置を示す三次元構造物外モデルデータの少なくともモデル表面が点群化された点群データである、
ことを特徴とする項目1ないし3のいずれかに記載の情報処理システム。
[項目5]
前記三次元構造物外モデルデータは、CityGMLデータである、
ことを特徴とする項目4に記載の情報処理システム。
[項目6]
前記三次元構造物内部点群データ及び前記三次元構造物外点群データの少なくともいずれかは、事前に前記構造物内でセンサを移動させて取得された点群データである、
ことを特徴とする項目1に記載の情報処理システム。
[項目7]
前記三次元構造物内部点群データ及び前記三次元構造物外点群データの少なくともいずれかは、対応する三次元構造物モデルデータ内で仮想センサを移動させて取得された点群データである、
ことを特徴とする項目1に記載の情報処理システム。
[項目8]
少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して生成された三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える、
ことを特徴とする移動体。
[項目9]
三次元合成点群データ生成部により、少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成するステップと、
移動経路生成部により、前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成するステップと、
をコンピュータに実行させることを特徴とする情報処理方法。
[項目10]
少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成機能と、
前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成機能と、
をコンピュータに実現することを特徴とするプログラム。 The contents of the embodiments of the present invention will be listed and explained. An information processing system etc. according to an embodiment of the present invention has the following configuration.
[Item 1]
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. a three-dimensional composite point cloud data generation unit that generates three-dimensional composite point cloud data;
a moving route generation unit that generates moving route information indicating a moving route for a moving body that spans inside and outside of the structure based on the three-dimensional composite point group data;
An information processing system characterized by:
[Item 2]
The three-dimensional structure internal point cloud data is point cloud data in which at least the model surface of the three-dimensional structure internal model data indicating at least the arrangement of components inside the structure is formed into a point cloud.
The information processing system according to
[Item 3]
The three-dimensional structure internal model data is BIM data or CIM data.
The information processing system according to
[Item 4]
The point cloud data outside the three-dimensional structure is point cloud data in which at least the model surface of the three-dimensional outside structure model data indicating at least the arrangement of components outside the structure is converted into a point cloud.
The information processing system according to any one of
[Item 5]
The three-dimensional structure external model data is CityGML data,
The information processing system according to
[Item 6]
At least one of the point group data inside the three-dimensional structure and the point group data outside the three-dimensional structure is point group data obtained by moving a sensor within the structure in advance.
The information processing system according to
[Item 7]
At least one of the three-dimensional structure internal point group data and the three-dimensional structure external point group data is point group data obtained by moving a virtual sensor within the corresponding three-dimensional structure model data.
The information processing system according to
[Item 8]
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. a movement path generation unit that generates movement path information indicating a movement path for a moving object that spans inside and outside of the structure, based on the generated three-dimensional composite point group data;
A mobile object characterized by:
[Item 9]
The three-dimensional composite point cloud data generation unit generates three-dimensional structure internal point cloud data indicating at least the arrangement of components inside the structure, and three-dimensional structure external point cloud data indicating at least the arrangement of components outside the structure. a step of composing the point cloud data with each other to generate three-dimensional composite point cloud data;
a step of generating movement path information indicating a movement path for the mobile body spanning inside and outside of the structure, based on the three-dimensional composite point group data, by a movement path generation unit;
An information processing method characterized by causing a computer to execute.
[Item 10]
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. A 3D composite point cloud data generation function that generates 3D composite point cloud data,
a travel route generation function that generates travel route information indicating a travel route for a mobile object that spans inside and outside of the structure based on the three-dimensional composite point group data;
A program characterized by realizing this on a computer.
<実施の形態の詳細>
以下、本発明の実施の形態による情報処理システム等についての実施の形態を説明する。添付図面において、同一または類似の要素には同一または類似の参照符号及び名称が付され、各実施形態の説明において同一または類似の要素に関する重複する説明は省略することがある。また、各実施形態で示される特徴は、互いに矛盾しない限り他の実施形態にも適用可能である。 <Details of embodiment>
Embodiments of information processing systems and the like according to embodiments of the present invention will be described below. In the accompanying drawings, the same or similar elements are given the same or similar reference numerals and names, and redundant description of the same or similar elements may be omitted in the description of each embodiment. Furthermore, features shown in each embodiment can be applied to other embodiments as long as they do not contradict each other.
以下、本発明の実施の形態による情報処理システム等についての実施の形態を説明する。添付図面において、同一または類似の要素には同一または類似の参照符号及び名称が付され、各実施形態の説明において同一または類似の要素に関する重複する説明は省略することがある。また、各実施形態で示される特徴は、互いに矛盾しない限り他の実施形態にも適用可能である。 <Details of embodiment>
Embodiments of information processing systems and the like according to embodiments of the present invention will be described below. In the accompanying drawings, the same or similar elements are given the same or similar reference numerals and names, and redundant description of the same or similar elements may be omitted in the description of each embodiment. Furthermore, features shown in each embodiment can be applied to other embodiments as long as they do not contradict each other.
<構成>
図1に示されるように、本実施の形態における情報処理システムは、管理サーバ1と、一以上のユーザ端末2と、一以上の移動体4(例えば、飛行体や走行体など)と、一以上の移動体格納装置5とを有している。管理サーバ1と、ユーザ端末2と、移動体4と、移動体格納装置5は、ネットワークを介して互いに通信可能に接続されている。なお、図示された構成は一例であり、これに限らず、例えば、移動体格納装置5を有さずに、ユーザにより持ち運びされる構成などでもよい。 <Configuration>
As shown in FIG. 1, the information processing system according to the present embodiment includes amanagement server 1, one or more user terminals 2, and one or more mobile objects 4 (for example, a flying object, a traveling object, etc.). It has the above mobile object storage device 5. The management server 1, the user terminal 2, the mobile object 4, and the mobile object storage device 5 are connected to each other via a network so that they can communicate with each other. Note that the illustrated configuration is an example, and is not limited to this. For example, a configuration that does not include the movable body storage device 5 and is carried by the user may be used.
図1に示されるように、本実施の形態における情報処理システムは、管理サーバ1と、一以上のユーザ端末2と、一以上の移動体4(例えば、飛行体や走行体など)と、一以上の移動体格納装置5とを有している。管理サーバ1と、ユーザ端末2と、移動体4と、移動体格納装置5は、ネットワークを介して互いに通信可能に接続されている。なお、図示された構成は一例であり、これに限らず、例えば、移動体格納装置5を有さずに、ユーザにより持ち運びされる構成などでもよい。 <Configuration>
As shown in FIG. 1, the information processing system according to the present embodiment includes a
<管理サーバ1>
図2は、管理サーバ1のハードウェア構成を示す図である。なお、図示された構成は一例であり、これ以外の構成を有していてもよい。 <Management server 1>
FIG. 2 is a diagram showing the hardware configuration of themanagement server 1. Note that the illustrated configuration is an example, and other configurations may be used.
図2は、管理サーバ1のハードウェア構成を示す図である。なお、図示された構成は一例であり、これ以外の構成を有していてもよい。 <
FIG. 2 is a diagram showing the hardware configuration of the
図示されるように、管理サーバ1は、ユーザ端末2と、移動体4、移動体格納装置5と接続され本システムの一部を構成する。管理サーバ1は、例えばワークステーションやパーソナルコンピュータのような汎用コンピュータとしてもよいし、或いはクラウド・コンピューティングによって論理的に実現されてもよい。
As illustrated, a management server 1 is connected to a user terminal 2, a mobile object 4, and a mobile object storage device 5, and constitutes a part of this system. The management server 1 may be a general-purpose computer such as a workstation or a personal computer, or may be logically realized by cloud computing.
管理サーバ1は、少なくとも、プロセッサ10、メモリ11、ストレージ12、送受信部13、入出力部14等を備え、これらはバス15を通じて相互に電気的に接続される。
The management server 1 includes at least a processor 10, a memory 11, a storage 12, a transmitting/receiving section 13, an input/output section 14, etc., which are electrically connected to each other via a bus 15.
プロセッサ10は、管理サーバ1全体の動作を制御し、各要素間におけるデータの送受信の制御、及びアプリケーションの実行及び認証処理に必要な情報処理等を行う演算装置である。例えばプロセッサ10はCPU(Central Processing Unit)および/またはGPU(Graphics Processing Unit)であり、ストレージ12に格納されメモリ11に展開された本システムのためのプログラム等を実行して各情報処理を実施する。
The processor 10 is an arithmetic device that controls the overall operation of the management server 1, controls the transmission and reception of data between each element, and performs information processing necessary for application execution and authentication processing. For example, the processor 10 is a CPU (Central Processing Unit) and/or a GPU (Graphics Processing Unit), and executes programs for this system stored in the storage 12 and developed in the memory 11 to perform various information processing. .
メモリ11は、DRAM(Dynamic Random Access Memory)等の揮発性記憶装置で構成される主記憶と、フラッシュメモリやHDD(Hard Disc Drive)等の不揮発性記憶装置で構成される補助記憶と、を含む。メモリ11は、プロセッサ10のワークエリア等として使用され、また、管理サーバ1の起動時に実行されるBIOS(Basic Input / Output System)、及び各種設定情報等を格納する。
The memory 11 includes a main memory configured with a volatile storage device such as a DRAM (Dynamic Random Access Memory), and an auxiliary memory configured with a non-volatile storage device such as a flash memory or an HDD (Hard Disc Drive). . The memory 11 is used as a work area for the processor 10, and also stores a BIOS (Basic Input/Output System) executed when the management server 1 is started, various setting information, and the like.
ストレージ12は、アプリケーション・プログラム等の各種プログラムを格納する。各処理に用いられるデータを格納したデータベースがストレージ12に構築されていてもよい。
The storage 12 stores various programs such as application programs. A database storing data used for each process may be constructed in the storage 12.
送受信部13は、管理サーバ1をネットワークに接続する。なお、送受信部13は、Bluetooth(登録商標)及びBLE(Bluetooth Low Energy)の近距離通信インターフェースを備えていてもよい。
The transmitting/receiving unit 13 connects the management server 1 to the network. Note that the transmitting/receiving unit 13 may include a short-range communication interface of Bluetooth (registered trademark) and BLE (Bluetooth Low Energy).
入出力部14は、キーボード・マウス類等の情報入力機器、及びディスプレイ等の出力機器である。
The input/output unit 14 is information input devices such as a keyboard and mouse, and output devices such as a display.
バス15は、上記各要素に共通に接続され、例えば、アドレス信号、データ信号及び各種制御信号を伝達する。
The bus 15 is commonly connected to each of the above elements and transmits, for example, address signals, data signals, and various control signals.
<ユーザ端末2>
図3に示されるユーザ端末2もまた、プロセッサ20、メモリ21、ストレージ22、送受信部23、入出力部24等を備え、これらはバス25を通じて相互に電気的に接続される。各要素の機能は、上述した管理サーバ1と同様に構成することが可能であることから、各要素の詳細な説明は省略する。 <User terminal 2>
Theuser terminal 2 shown in FIG. 3 also includes a processor 20, a memory 21, a storage 22, a transmitting/receiving section 23, an input/output section 24, etc., which are electrically connected to each other through a bus 25. Since the functions of each element can be configured in the same manner as the management server 1 described above, a detailed explanation of each element will be omitted.
図3に示されるユーザ端末2もまた、プロセッサ20、メモリ21、ストレージ22、送受信部23、入出力部24等を備え、これらはバス25を通じて相互に電気的に接続される。各要素の機能は、上述した管理サーバ1と同様に構成することが可能であることから、各要素の詳細な説明は省略する。 <
The
ユーザ端末2は、例えば、パーソナルコンピュータやタブレット端末等の情報処理装置であるが、スマートフォンや携帯電話、PDA等により構成してもよい。特に、入出力部24は、ユーザ端末2がパーソナルコンピュータで構成されている場合はディスプレイとキーボードやマウスにより構成され、ユーザ端末2がスマートフォンまたはタブレット端末で構成されている場合はタッチパネル等から構成される。
The user terminal 2 is, for example, an information processing device such as a personal computer or a tablet terminal, but may also be configured by a smartphone, a mobile phone, a PDA, or the like. In particular, the input/output unit 24 is composed of a display, a keyboard, and a mouse when the user terminal 2 is composed of a personal computer, and is composed of a touch panel etc. when the user terminal 2 is composed of a smartphone or a tablet terminal. Ru.
<移動体4>
移動体4は、ドローンや無人航空機などの飛行体や無人地上車両などの走行体などを含む既知の移動体であって、特に自律制御可能な移動体である。移動体4の具体的な例として、飛行体4を例示して以下で説明する。図4は、飛行体4のハードウェア構成を示すブロック図である。フライトコントローラ41は、プログラマブルプロセッサ(例えば、中央演算処理装置(CPU))などの1つ以上のプロセッサを有することができる。 <Mobile object 4>
The movingobject 4 is a known moving object including a flying object such as a drone or an unmanned aerial vehicle, a running object such as an unmanned ground vehicle, and is particularly a moving object that can be autonomously controlled. As a specific example of the moving object 4, the flying object 4 will be explained below. FIG. 4 is a block diagram showing the hardware configuration of the flying object 4. As shown in FIG. Flight controller 41 may include one or more processors, such as a programmable processor (eg, a central processing unit (CPU)).
移動体4は、ドローンや無人航空機などの飛行体や無人地上車両などの走行体などを含む既知の移動体であって、特に自律制御可能な移動体である。移動体4の具体的な例として、飛行体4を例示して以下で説明する。図4は、飛行体4のハードウェア構成を示すブロック図である。フライトコントローラ41は、プログラマブルプロセッサ(例えば、中央演算処理装置(CPU))などの1つ以上のプロセッサを有することができる。 <
The moving
また、フライトコントローラ41は、メモリ411を有しており、当該メモリにアクセス可能である。メモリ411は、1つ以上のステップを行うためにフライトコントローラが実行可能であるロジック、コード、および/またはプログラム命令を記憶している。また、フライトコントローラ41は、慣性センサ(加速度センサ、ジャイロセンサ)、GPSセンサ、近接センサ(例えば、ライダー)等のセンサ類412を含みうる。
Additionally, the flight controller 41 has a memory 411 and can access the memory. Memory 411 stores logic, code, and/or program instructions executable by the flight controller to perform one or more steps. Further, the flight controller 41 may include sensors 412 such as an inertial sensor (acceleration sensor, gyro sensor), a GPS sensor, a proximity sensor (eg, lidar), and the like.
メモリ411は、例えば、SDカードやランダムアクセスメモリ(RAM)などの分離可能な媒体または外部の記憶装置を含んでいてもよい。カメラ/センサ類42から取得したデータは、メモリ411に直接に伝達されかつ記憶されてもよい。例えば、カメラ等で撮影した静止画・動画データが内蔵メモリ又は外部メモリに記録されてもよいが、これに限らず、カメラ/センサ42または内蔵メモリからネットワークNWを介して、少なくとも管理サーバ1やユーザ端末2、移動体格納装置5のいずれか1つに記録されてもよい。カメラ42は飛行体4にジンバル43を介して設置されてもよい。
The memory 411 may include, for example, a separable medium or external storage device such as an SD card or random access memory (RAM). Data acquired from cameras/sensors 42 may be communicated directly to and stored in memory 411. For example, still image/video data taken with a camera etc. may be recorded in the built-in memory or external memory, but is not limited to this. It may be recorded in either the user terminal 2 or the mobile storage device 5. The camera 42 may be installed on the flying object 4 via a gimbal 43.
フライトコントローラ41は、飛行体の状態を制御するように構成された図示しない制御モジュールを含んでいる。例えば、制御モジュールは、6自由度(並進運動x、y及びz、並びに回転運動θx、θy及びθz)を有する飛行体の空間的配置、速度、および/または加速度を調整するために、ESC44(Electric Speed Controller)を経由して飛行体の推進機構(モータ45等)を制御する。バッテリー48から給電されるモータ45によりプロペラ46が回転することで飛行体の揚力を生じさせる。制御モジュールは、搭載部、センサ類の状態のうちの1つ以上を制御することができる。
Flight controller 41 includes a control module (not shown) configured to control the state of the aircraft. For example, the control module may be configured to adjust the spatial position, velocity, and/or acceleration of an air vehicle with six degrees of freedom (translational motion x, y, and z, and rotational motion θ x , θ y , and θ z ). , and controls the propulsion mechanism (motor 45, etc.) of the aircraft via an ESC 44 (Electric Speed Controller). A propeller 46 is rotated by a motor 45 supplied with power from a battery 48, thereby generating lift of the flying object. The control module can control one or more of the states of the mounting section and sensors.
また、フライトコントローラ41は、1つ以上の外部のデバイス(例えば、送受信機(プロポ)49、管理サーバ1、ユーザ端末2、表示装置、または他の遠隔の制御器)へのデータの送信および/または外部のデバイスからのデータの受信が可能に構成された送受信部47と通信可能である。送受信機49は、有線通信または無線通信などの任意の適当な通信手段を使用することができる。
Flight controller 41 also transmits and/or transmits data to one or more external devices (e.g., transceiver 49, management server 1, user terminal 2, display device, or other remote controller). Alternatively, it can communicate with a transmitter/receiver 47 configured to be able to receive data from an external device. Transceiver 49 may use any suitable communication means, such as wired or wireless communication.
さらに、フライトコントローラ41は、上述の飛行体の状態の制御などの移動体状態制御機能のみならず、外部のデバイス(特にユーザ端末2)からの指示に応じてアプリケーション・プログラムを実行するなどして、データ処理に関する各種機能を実現するようにしてもよく、例えば後述する移動経路生成部420や移動指示部430に対応する機能を実行可能であってもよい。なお、フライトコントローラ41にデータ処理に関する機能を実現して移動体状態制御機能とデータ処理機能とで兼用としてもよいが、これに代えて、データ処理機能専用のプロセッサ(制御部)を別途備えるようにしてもよい。
Furthermore, the flight controller 41 not only functions to control the state of the flying object, such as controlling the state of the flying object described above, but also executes application programs in response to instructions from external devices (particularly the user terminal 2). , various functions related to data processing may be realized, for example, functions corresponding to a movement route generation section 420 and a movement instruction section 430, which will be described later, may be executed. Note that the flight controller 41 may have a function related to data processing so that it can be used for both the mobile object state control function and the data processing function, but instead of this, a separate processor (control unit) dedicated to the data processing function may be provided. You can also do this.
送受信部47は、例えば、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)、赤外線、無線、WiFi、ポイントツーポイント(P2P)ネットワーク、電気通信ネットワーク、クラウド通信などのうちの1つ以上を利用することができる。
The transmitter/receiver 47 uses, for example, one or more of a local area network (LAN), wide area network (WAN), infrared rays, wireless, WiFi, point-to-point (P2P) network, telecommunications network, cloud communication, etc. can do.
送受信部47は、カメラ/センサ類42で取得したデータ、フライトコントローラ41が生成した処理結果、所定の制御データ、端末または遠隔の制御器からのユーザコマンドなどのうちの1つ以上を送信および/または受け取ることができる。
The transmitting/receiving unit 47 transmits and/or transmits one or more of data acquired by the camera/sensors 42, processing results generated by the flight controller 41, predetermined control data, user commands from a terminal or remote controller, etc. or can be received.
本実施の形態によるカメラ/センサ類42は、慣性センサ(加速度センサ、ジャイロセンサ)、GPSセンサ、近接センサ(例えば、LiDAR(Light Detection And Ranging)等)、またはビジョン/イメージセンサ(例えば、カメラ)を含み得る。
The cameras/sensors 42 according to the present embodiment include an inertial sensor (acceleration sensor, gyro sensor), a GPS sensor, a proximity sensor (for example, LiDAR (Light Detection And Ranging), etc.), or a vision/image sensor (for example, a camera). may include.
<ユーザ端末2の機能>
図5は、ユーザ端末2に実装される機能を例示したブロック図である。本発明の実施の形態においては、少なくとも構造物(例えばビルなどの建物)内部の構成物(例えば、内壁、柱、天井、窓、ドア、階段、内部設備など)の配置を示す点群を含む三次元構造物内点群データ、及び、少なくとも構造物外部の構成物(例えば、外壁、屋根、窓、ドア、階段、外部設備、道路、線路、駅、街路灯、バス停、橋梁、トンネル、地形、植生、水域など)の配置を示す点群を含む三次元構造物外点群データと、を互いに合成して三次元合成点群データを生成するために各種機能部を有している。なお、各種機能部の一部または全部は、管理サーバ1または移動体4の少なくともいずれかに搭載される情報処理装置(プロセッサ、制御部)にて実現されてもよい。 <Functions ofuser terminal 2>
FIG. 5 is a block diagram illustrating functions implemented in theuser terminal 2. As shown in FIG. In an embodiment of the present invention, at least a point group indicating the arrangement of internal components (e.g., inner walls, columns, ceilings, windows, doors, stairs, internal equipment, etc.) of a structure (e.g., a building such as a building) is included. Point cloud data inside a three-dimensional structure, and at least structures outside the structure (e.g., external walls, roofs, windows, doors, stairs, external equipment, roads, railways, stations, street lights, bus stops, bridges, tunnels, topography) It has various functional units to generate three-dimensional composite point cloud data by compositing three-dimensional structure external point cloud data including point clouds indicating the arrangement of plants, vegetation, water bodies, etc.). Note that some or all of the various functional units may be realized by an information processing device (processor, control unit) installed in at least one of the management server 1 and the mobile body 4.
図5は、ユーザ端末2に実装される機能を例示したブロック図である。本発明の実施の形態においては、少なくとも構造物(例えばビルなどの建物)内部の構成物(例えば、内壁、柱、天井、窓、ドア、階段、内部設備など)の配置を示す点群を含む三次元構造物内点群データ、及び、少なくとも構造物外部の構成物(例えば、外壁、屋根、窓、ドア、階段、外部設備、道路、線路、駅、街路灯、バス停、橋梁、トンネル、地形、植生、水域など)の配置を示す点群を含む三次元構造物外点群データと、を互いに合成して三次元合成点群データを生成するために各種機能部を有している。なお、各種機能部の一部または全部は、管理サーバ1または移動体4の少なくともいずれかに搭載される情報処理装置(プロセッサ、制御部)にて実現されてもよい。 <Functions of
FIG. 5 is a block diagram illustrating functions implemented in the
本実施の形態においては、ユーザ端末2は、通信部210、三次元構造物点群データ生成部220、三次元合成点群データ生成部230、記憶部270を備えている。また、記憶部270は、三次元データ記憶部271などの各種データベースを含む。
In the present embodiment, the user terminal 2 includes a communication section 210, a three-dimensional structure point cloud data generation section 220, a three-dimensional composite point cloud data generation section 230, and a storage section 270. Furthermore, the storage unit 270 includes various databases such as a three-dimensional data storage unit 271.
通信部210は、管理サーバ1や、移動体4、移動体格納装置5と通信を行う。通信部210は、管理サーバ1や、移動体4、移動体格納装置5からの各種要求やデータ等を受け付ける受付部としても機能する。
The communication unit 210 communicates with the management server 1, the mobile body 4, and the mobile body storage device 5. The communication unit 210 also functions as a reception unit that receives various requests, data, etc. from the management server 1, the mobile unit 4, and the mobile unit storage device 5.
三次元構造物点群データ生成部220は、少なくとも構造物内部の構成物の配置を示す三次元構造物内モデルデータや、少なくとも構造物外部の構成物の配置を示す三次元構造物外モデルデータにおける、少なくともモデル表面(サーフェス)を点群化した三次元構造物内点群データや三次元構造物外点群データを生成する。各三次元モデルデータ(三次元構造物内モデルデータ、三次元構造物外モデルデータ等)、各三次元点群データ(三次元構造物内点群データ、三次元構造物外点群データ等)は、それぞれ三次元座標系で表現されるデータであって、管理サーバ1や移動体4から読み出されたり、ユーザ端末2上のアプリケーションで作成されたりなどして三次元データ記憶部271に記憶されて管理される。
The three-dimensional structure point cloud data generation unit 220 generates three-dimensional structure internal model data indicating at least the arrangement of components inside the structure, and three-dimensional structure external model data indicating at least the arrangement of components outside the structure. , three-dimensional structure internal point group data and three-dimensional structure external point group data are generated by converting at least the model surface into a point group. Each 3D model data (model data inside a 3D structure, model data outside a 3D structure, etc.), each 3D point cloud data (point group data inside a 3D structure, point group data outside a 3D structure, etc.) are data expressed in a three-dimensional coordinate system, and are stored in the three-dimensional data storage unit 271 by being read from the management server 1 or the mobile object 4, created by an application on the user terminal 2, etc. managed.
三次元構造物内モデルデータは、少なくとも構造物内の構成物の配置を示し寸法情報を有する三次元構造物内モデルデータであればどのようなデータであってもよいが、例えば、CAD(Computer―Aided Design)設計ソフトウェアで作成されたデータを基にして作成されたモデルであって、BIM(Building Information Modeling)データやCIM(Construction Information Modeling)データ、CADデータ、BIMデータ等から再構築された三次元モデルデータなどであってもよいし、二次元の設計図データに基づき所定の高さを有する構成物を生成することで得られた三次元モデルデータであってもよい。なお、三次元構造物内モデルデータは、上述のとおり、構造物内部の構成物の配置を示すものであるが、必ずしも構造物内部の構成物のみの配置を示すものでなくともよく、例えば、外壁等の構造物に係る構造物外部の構成物の配置を含んでいてもよい。また、三次元モデルデータの再構築等は、管理サーバ1やユーザ端末2のプロセッサにおいて実行されてもよいし、管理サーバ1やユーザ端末2の外部で実行されて内部へ取得されてもよい。三次元構造物内モデルデータは、設定された任意の点を原点(基準点)とした三次元の直交座標系により表現されるデータであり得るが、例えば水平方向が緯度経度座標であって、鉛直方向が高度座標である三次元座標系により表現されるデータであってもよいし、必ずしもそうでなくてもよい。
The three-dimensional structure internal model data may be any type of three-dimensional structural internal model data that indicates at least the arrangement of components within the structure and has dimensional information. -Aided Design) A model created based on data created with design software, including BIM (Building Information Modeling) data, CIM (Construction Information Modeling) data, and CAD data. , reconstructed from BIM data, etc. It may be three-dimensional model data or the like, or it may be three-dimensional model data obtained by generating a structure having a predetermined height based on two-dimensional blueprint data. Note that, as described above, the three-dimensional structure internal model data indicates the arrangement of the components inside the structure, but it does not necessarily have to indicate the arrangement of only the components inside the structure; for example, It may also include the arrangement of components outside the structure related to the structure, such as an outer wall. Moreover, reconstruction of the three-dimensional model data, etc. may be executed in the processor of the management server 1 or the user terminal 2, or may be executed outside the management server 1 or the user terminal 2 and acquired into the inside. The three-dimensional structure internal model data can be data expressed by a three-dimensional orthogonal coordinate system with an arbitrary set point as the origin (reference point), but for example, the horizontal direction is latitude and longitude coordinates, The data may be expressed by a three-dimensional coordinate system in which the vertical direction is the altitude coordinate, but this is not necessarily the case.
三次元構造物外モデルデータは、少なくとも構造物外の構成物の配置を示し寸法情報を有する三次元構造物外モデルデータであればどのようなデータであってもよいが、特に地表及び地表上の構造物の少なくとも一部の表面形状を三次元の立体空間で仮想的に表現するモデルを含むものであることが好ましく、例えば、CityGML(Generalized Markup Language)、CityJson、GeoTIFFなどの三次元都市モデルデータや本システム外部の三次元都市モデルデータベースに格納される三次元都市モデルデータなどであってもよい。三次元構造物外モデルデータは、水平方向が緯度経度座標であって、鉛直方向が高度座標である三次元座標系により表現されるデータであり得る。
The three-dimensional outside-structure model data may be any type of three-dimensional outside-structure model data that indicates at least the arrangement of components outside the structure and has dimensional information, but in particular data on the ground surface and on the ground surface. It is preferable that the model includes a model that virtually represents the surface shape of at least a part of the structure in a three-dimensional three-dimensional space, for example, three-dimensional city model data such as CityGML (Generalized Markup Language), CityJson, GeoTIFF, etc. It may also be three-dimensional city model data stored in a three-dimensional city model database outside this system. The three-dimensional external structure model data may be data expressed by a three-dimensional coordinate system in which the horizontal direction is latitude and longitude coordinates and the vertical direction is altitude coordinates.
三次元構造物点群データ生成部220による三次元点群モデルデータ(三次元構造物内点群データ、三次元構造物外点群データ等)の生成方法は、上述の三次元モデルデータから構造物内または構造物外の構成物に関するモデル表面(サーフェス)を点群化した三次元点群モデルデータが生成可能であればどのような方法であってもよいが、例えば、三次元モデルデータの構造物内または構造物外を仮想のセンサ(例えば、仮想のLiDAR)を搭載した仮想の移動体4を移動させることにより構造物内または構造物外の構成物に関する三次元点群モデルデータを生成してもよい。これにより、理論上、構造物内または構造物外を移動体4のセンサで実測した場合の点群センシングデータに近い点群データを生成することができる。また、他の三次元点群モデルデータの生成方法は、三次元モデルデータを所定の間隔で均等に点群化してもよいし、三次元モデルデータがポリゴンデータである場合には各頂点に点を配置して点群化してもよいし、既知の点群化技術(点群データへの変換技術)を用いて点群化してもよい。
The method for generating three-dimensional point cloud model data (point cloud data inside a three-dimensional structure, point cloud data outside a three-dimensional structure, etc.) by the three-dimensional structure point cloud data generation unit 220 is to generate a structure from the three-dimensional model data described above. Any method can be used as long as it is possible to generate three-dimensional point cloud model data that is a point cloud of model surfaces related to components inside or outside the structure. Three-dimensional point cloud model data regarding components inside or outside the structure is generated by moving a virtual moving body 4 equipped with a virtual sensor (for example, virtual LiDAR) inside or outside the structure. You may. As a result, it is theoretically possible to generate point cloud data close to point cloud sensing data obtained when the inside or outside of the structure is actually measured using the sensor of the moving body 4. Other methods of generating 3D point cloud model data include forming 3D model data into a point cloud evenly at predetermined intervals, or if the 3D model data is polygon data, points are placed at each vertex. may be arranged to form a point cloud, or may be formed into a point cloud using a known point cloud technology (conversion technology to point cloud data).
三次元合成点群データ生成部230は、三次元構造物内点群データ及び三次元構造物外点群データを合成して三次元合成点群データを生成してもよい。三次元構造物内点群データ及び三次元構造物外点群データは、上述のように三次元構造物点群データ生成部220により生成された三次元点群データであってもよいし、三次元構造物内点群データ及び三次元構造物外点群データの少なくともいずれかが事前にセンサ(例えば、LiDARセンサ)を搭載した移動体4を移動させることにより取得した三次元点群データであってもよい。
The three-dimensional composite point cloud data generation unit 230 may generate three-dimensional composite point cloud data by combining the three-dimensional structure internal point cloud data and the three-dimensional structure external point cloud data. The three-dimensional structure internal point cloud data and the three-dimensional structure external point cloud data may be three-dimensional point cloud data generated by the three-dimensional structure point cloud data generation unit 220 as described above, or three-dimensional point cloud data At least one of the original point cloud data inside the structure and the point cloud data outside the three-dimensional structure is three-dimensional point cloud data obtained by moving a moving body 4 equipped with a sensor (for example, a LiDAR sensor) in advance. It's okay.
三次元合成点群データ生成部230による三次元点群データの生成方法(すなわち、合成方法)は、合成可能であればどのような方法であってもよく、例えば、ユーザ端末2上でユーザ操作に基づき両者の位置合わせ(及び縮尺合わせ)を行い、決定された位置で両者の三次元点群データを一体的な三次元合成点群データとして合成してもよいし、既知の点群合成技術を用いて三次元点群データ同士を互いに合成してもよい。しかしながら、本実施例における具体例としては、三次元構造物内点群データが三次元構造物外点群データと同様に緯度経度高さ座標系で表現されるかどうかによって合成方法が異なる。
The method of generating three-dimensional point cloud data by the three-dimensional composite point cloud data generation unit 230 (i.e., the synthesis method) may be any method as long as it can be synthesized. The two may be aligned (and scaled) based on the above, and the three-dimensional point cloud data of both may be combined as an integrated three-dimensional composite point cloud data at the determined position, or using known point cloud composition techniques. The three-dimensional point group data may be combined with each other using . However, as a specific example in this embodiment, the synthesis method differs depending on whether the point group data inside the three-dimensional structure is expressed in the latitude/longitude/height coordinate system like the point group data outside the three-dimensional structure.
合成方法の具体例の一例は、三次元構造物内点群データ及び三次元構造物外点群データが共に緯度経度高さ座標系などの共通の三次元座標系で表現される場合について説明する。このような場合においては、両三次元点群データの各点データが緯度経度高さ座標で表現されているので、同一の仮想空間内に配置することで合成が実行されたこととなる。なお、両三次元点群データが共に緯度経度高さ座標で表現されているが、実際に移動体4が構造物内を移動する際には移動体4の位置情報は緯度経度高さ座標で取得することは困難であるので、三次元合成点群データは、予め仮想空間内の所定の基準点を原点とする三次元直交基準座標系に変換しておいてもよい。もしくは、管理サーバ1やユーザ端末2、移動体4のいずれかにおいて当該変換を行う座標変換部240を備えて、構造物内で取得した移動体4の位置情報を緯度経度高さ座標に変換するようにしてもよい。
As a specific example of the synthesis method, a case will be explained in which point group data inside a three-dimensional structure and point group data outside a three-dimensional structure are both expressed in a common three-dimensional coordinate system such as a latitude-longitude-height coordinate system. . In such a case, since each point data of both three-dimensional point group data is expressed by latitude, longitude, and height coordinates, the combination is executed by arranging them in the same virtual space. Although both three-dimensional point cloud data are expressed in latitude, longitude, and height coordinates, when the moving object 4 actually moves within a structure, the position information of the moving object 4 is expressed in latitude, longitude, and height coordinates. Since it is difficult to obtain such data, the three-dimensional composite point group data may be converted in advance to a three-dimensional orthogonal reference coordinate system having a predetermined reference point in the virtual space as the origin. Alternatively, the management server 1, the user terminal 2, or the moving body 4 is equipped with a coordinate conversion unit 240 that performs the conversion, and converts the position information of the moving body 4 acquired within the structure into latitude, longitude, and height coordinates. You can do it like this.
合成方法の具体例の他の例は、三次元構造物内点群データ及び三次元構造物外点群データが共通の三次元座標系ではない(たとえば、三次元構造物内点群データが緯度経度高さ座標系でなく、三次元構造物外点群データが緯度経度高さ座標系である場合など)場合について説明する。このような場合においては、例えば、図6のように同じ構造物に対して床面(例えば地上の床面)を対象に、三次元構造物内点群データ及び三次元構造物外点群データにおいて対応点を設定する(例えば図6では、三次元構造物外点群データにおいてはP1からP4と設定し、三次元構造物内点群データにおいてはP’1からP’4と設定している)。対応点は、例えば四角いビルなどの建物の1階部分(地上面)における四隅であってもよいし、その他の構造物の床面における特徴的な点であってもよい。なお、高さ情報が明確である対応点が設定可能であるならば、対応点は床面に限らず、いずれの特徴的な点であってもよい。対応点は、例えば、ユーザ端末2上でユーザ操作に基づき手動にて設定されてもよいし、既知の構造物モデルにおける形状解析技術や点群モデルにおける角部点検出技術などに基づき自動にて設定されてもよい。
Another specific example of the synthesis method is that the point cloud data inside the three-dimensional structure and the point cloud data outside the three-dimensional structure are not in a common three-dimensional coordinate system (for example, the point cloud data inside the three-dimensional structure is A case will be described in which the three-dimensional structure external point group data is not in the longitude/height coordinate system but in the latitude/longitude/height coordinate system. In such a case, for example, as shown in Figure 6, for the same structure, the point cloud data inside the three-dimensional structure and the point cloud data outside the three-dimensional structure are Set the corresponding points at ). The corresponding points may be, for example, the four corners of the first floor (ground surface) of a building such as a square building, or may be characteristic points on the floor of another structure. Note that as long as a corresponding point with clear height information can be set, the corresponding point is not limited to the floor surface, and may be any characteristic point. For example, the corresponding points may be set manually on the user terminal 2 based on user operations, or automatically based on shape analysis technology in a known structure model or corner point detection technology in a point cloud model. May be set.
そして、構造物外点群データの対応点P1からP4を基準点Oを原点とした三次元直交座標系で表現する座標値に変換し、当該三次元直交座標系における仮想空間において両対応点同士の距離が最小となる位置関係情報(座標変換情報)を求め、構造物内点群データの対応点P’1からP’4を上述の三次元直交座標系で表現する座標値を求めることで両三次元点群データを合成する。なお、両三次元点群データの位置関係情報が得られるので、必要に応じて構造物外点群データの緯度経度高さ座標系に基づいて、構造物内点群データを緯度経度高さ座標系の座標を付与するようにしてもよい。また、対応点は、三次元モデルデータ上で設定し、点群化後に対応する点データを対応点として再度設定してもよい。
Then, the corresponding points P1 to P4 of the point group data outside the structure are converted into coordinate values expressed in a three-dimensional orthogonal coordinate system with the reference point O as the origin, and both corresponding points are By determining the positional relationship information (coordinate transformation information) that minimizes the distance between the Combine both 3D point cloud data. In addition, since the positional relationship information of both three-dimensional point cloud data can be obtained, if necessary, the point cloud data inside the structure can be changed to the latitude, longitude, and height coordinate system based on the latitude, longitude, and height coordinate system of the point cloud data outside the structure. The coordinates of the system may also be given. Further, the corresponding points may be set on the three-dimensional model data, and the corresponding point data may be set again as the corresponding points after point cloud formation.
ここで、上述のように同じ構造物に対して床面を対象に、三次元構造物内点群データ及び三次元構造物外点群データにおいて対応点を設定した場合、両対応点が必ずしも同一または近似した位置とならないこともあり得る。すなわち、三次元構造物内点群データにおいては内壁を基準とした対応点が設定され、三次元構造物外点群データにおいては外壁を基準としてた対応点が設定された場合、両対応点においてズレが生じ同一または近似した位置とならない。そこで、三次元構造物内点群データ及び三次元構造物外点群データにおいて複数の対応点を設定した後に重心点を算出し、重心点を対応点として設定して両三次元点群データを一致させて位置関係情報を求めてもよい。さらに、上述の床面等を対象とする対応点(以下、「第1対応点」という。)と重心点に対応する対応点(以下、「第2対応点」という。)とに基づき、両三次元点群データを一致させて位置関係情報を求めてもよく、特に第1対応点と第2対応点でどちらの一致度を優先するかを重みづけ係数により重みづけをして位置関係情報を求めてもよい。重み付けは、上述のズレが発生し得ることを鑑み、第2対応点に関する重み付けを第1対応点に関する重み付けよりも大きくしてもよい。
Here, when corresponding points are set in the 3D structure internal point cloud data and the 3D structure external point cloud data for the floor surface of the same structure as described above, both the corresponding points are not necessarily the same. Alternatively, the positions may not be approximate. In other words, if corresponding points are set with the inner wall as a reference in the 3D structure internal point cloud data, and corresponding points are set with the outer wall as the reference in the 3D structure external point cloud data, then at both corresponding points, There will be a shift and the positions will not be the same or similar. Therefore, after setting multiple corresponding points in the point cloud data inside the 3D structure and the point cloud data outside the 3D structure, the center of gravity is calculated, and the center of gravity is set as the corresponding point to combine both 3D point cloud data. Positional relationship information may be determined by matching. Furthermore, based on the corresponding points that target the floor surface, etc. (hereinafter referred to as "first corresponding points") and the corresponding points that correspond to the center of gravity (hereinafter referred to as "second corresponding points"), Positional relationship information may be obtained by matching three-dimensional point cloud data, and in particular, positional relationship information is determined by weighting which degree of matching is given priority between the first corresponding point and the second corresponding point using a weighting coefficient. You may also ask for In view of the possibility that the above-mentioned deviation may occur, the weighting may be such that the weighting for the second corresponding point is greater than the weighting for the first corresponding point.
このように、互いに異なる三次元構造物内部点群データ及び三次元構造物外部点群データを合成し、構造物内外の構成物の配置を示す三次元合成点群データを統一的な三次元座標系により表現することが可能となる。これにより、例えばユーザ端末2上に表示される三次元合成点群データをベースにウェイポイントを設定した場合において、移動経路が構造物の内部と外部で跨る場合であっても、統一的な三次元座標系に基づく移動経路生成などの位置指定が可能となる。
In this way, the three-dimensional structure internal point cloud data and the three-dimensional structure external point cloud data, which are different from each other, are synthesized and the three-dimensional composite point cloud data indicating the arrangement of components inside and outside the structure is converted into unified three-dimensional coordinates. It becomes possible to express it by a system. As a result, for example, when waypoints are set based on three-dimensional composite point cloud data displayed on the user terminal 2, even if the travel route straddles the inside and outside of a structure, a unified three-dimensional It becomes possible to specify positions such as generating travel routes based on the original coordinate system.
<移動体4の機能>
図5は、さらに移動体4に実装される機能も例示したブロック図である。本発明の実施の形態においては、生成された三次元合成点群データに基づき、移動体のための構造物内外に跨る移動経路情報を生成し、移動体4に移動経路上の移動を指示するために各種機能部を有している。なお、各種機能部の一部または全部は、管理サーバ1やユーザ端末2の少なくともいずれかに搭載される情報処理装置(プロセッサ、制御部)にて実現されてもよい。 <Functions ofmobile object 4>
FIG. 5 is a block diagram further illustrating functions implemented in themobile body 4. In the embodiment of the present invention, based on the generated three-dimensional composite point group data, movement route information for the moving body spanning inside and outside the structure is generated, and the moving body 4 is instructed to move on the movement route. It has various functional parts for this purpose. Note that some or all of the various functional units may be realized by an information processing device (processor, control unit) installed in at least one of the management server 1 and the user terminal 2.
図5は、さらに移動体4に実装される機能も例示したブロック図である。本発明の実施の形態においては、生成された三次元合成点群データに基づき、移動体のための構造物内外に跨る移動経路情報を生成し、移動体4に移動経路上の移動を指示するために各種機能部を有している。なお、各種機能部の一部または全部は、管理サーバ1やユーザ端末2の少なくともいずれかに搭載される情報処理装置(プロセッサ、制御部)にて実現されてもよい。 <Functions of
FIG. 5 is a block diagram further illustrating functions implemented in the
本実施の形態においては、移動体4は、移動経路生成部420、移動指示部430、座標変換部440、記憶部470を備えている。また、記憶部470は、移動経路情報記憶部471、移動情報記憶部472の各種データベースを含む。
In the present embodiment, the moving body 4 includes a movement route generation section 420, a movement instruction section 430, a coordinate conversion section 440, and a storage section 470. Furthermore, the storage unit 470 includes various databases such as a travel route information storage unit 471 and a travel information storage unit 472.
移動経路生成部420は、例えばユーザ端末2上に表示される三次元合成点群データに対してユーザの選択操作により一以上のウェイポイント情報を始点から終点まで順次に、または、任意の点を任意の順で設定し、当該ウェイポイント情報に基づいて既知の方法により移動経路情報を生成し、移動経路情報記憶部471に記憶され、管理するようにしてもよいし、三次元合成点群データを解析し、例えば構造物内の特定の又は全ての構成物の情報を取得可能なウェイポイント情報を設定した移動経路を算出し、これを移動経路情報として移動経路情報記憶部471に記憶され、管理するようにしてもよい。
For example, the movement route generation unit 420 sequentially generates one or more waypoint information from a start point to an end point, or generates arbitrary points based on the user's selection operation on the three-dimensional composite point group data displayed on the user terminal 2. The waypoint information may be set in an arbitrary order, and travel route information may be generated by a known method based on the waypoint information, and stored and managed in the travel route information storage unit 471, or three-dimensional composite point cloud data for example, calculates a travel route in which waypoint information that can obtain information on specific or all components within the structure is set, and stores this as travel route information in the travel route information storage unit 471, It may also be managed.
なお、移動経路は、例えば、移動体格納装置5の位置を移動開始位置及び移動終了位置として、各ウェイポイントを通過する移動経路を生成するようにしてもよいし、逆に移動体格納装置5を有さずに、ユーザにより機体を持ち運びされた位置を移動開始位置としたり、移動終了位置においてユーザが機体を回収したりする構成などでもよいし、管理サーバ1やユーザ端末2、移動体4の記憶部において管理された移動体格納装置5の情報(例えば、位置情報や格納状態情報、格納機情報など)を基に、移動開始位置または移動終了位置として選択された移動体格納装置5の位置も含めた移動経路として生成される構成でもよい。
Note that the movement route may be generated, for example, by setting the position of the moving body storage device 5 as the movement start position and the movement end position, and passing through each waypoint, or conversely, Alternatively, the configuration may be such that the position where the aircraft is carried by the user is set as the movement start position, or the user collects the aircraft at the movement end position. Based on the information (for example, position information, storage status information, storage machine information, etc.) of the mobile body storage device 5 managed in the storage unit of the mobile body storage device 5, the mobile body storage device 5 selected as the movement start position or movement end position is It may also be configured to be generated as a movement route including the location.
移動指示部430は、移動経路情報記憶部471に記憶される移動経路情報を参照し、移動経路情報が示す座標に応じて移動体4の移動を指示する信号を移動体4へ送信する。また、移動指示部430は、座標変換部440(座標変換部240と同一機能であってもよい。)により、例えば、移動経路情報記憶部471に記憶される移動経路情報と上述の位置関係情報(座標変換情報)を参照し、移動経路情報が示す座標を移動体4の移動制御に用いられる三次元直交座標系(例えば、上述の三次元直交基準座標系など)に変換することで、移動体4の移動を指示するように構成されていてもよい。
The movement instruction unit 430 refers to the movement route information stored in the movement route information storage unit 471 and transmits a signal instructing the movement of the mobile body 4 to the mobile body 4 according to the coordinates indicated by the movement route information. Further, the movement instruction unit 430 uses the coordinate conversion unit 440 (which may have the same function as the coordinate conversion unit 240) to convert, for example, the movement route information stored in the movement route information storage unit 471 and the above-mentioned positional relationship information. (coordinate conversion information) and convert the coordinates indicated by the movement route information into a three-dimensional orthogonal coordinate system (for example, the three-dimensional orthogonal reference coordinate system mentioned above) used to control the movement of the moving object 4. It may be configured to instruct movement of the body 4.
移動情報記憶部472は、移動経路生成部420により移動経路を生成する際や、移動指示部430により当該移動経路上において自律制御された移動体4の移動が指示される際などに用いられるパラメータ情報や移動経路上で取得した移動時取得情報等を格納している。具体的なパラメータの例としては、例えば、移動速度、飛行高度(移動体4が飛行体である場合)、撮像画像のオーバーラップ率、移動時取得情報(例えば、画像情報や映像情報等)などを含む。
The movement information storage unit 472 stores parameters used when the movement route generation unit 420 generates a movement route, the movement instruction unit 430 instructs the autonomously controlled moving body 4 to move on the movement route, etc. It stores information, information acquired during movement, etc. acquired on the movement route. Examples of specific parameters include moving speed, flight altitude (if the moving object 4 is a flying object), overlap rate of captured images, information acquired during movement (for example, image information, video information, etc.), etc. including.
<移動経路生成方法の一例>
図7を参照して、本実施形態にかかる移動経路生成方法について、本実施の形態における情報処理システムの動作も含めて説明する。図7には、本実施形態にかかる移動経路生成方法のフローチャートが例示されている。このフローチャートでは、例示的にユーザ端末2上でアプリケーションを起動する構成を示しているが、これに限らず、例えば管理サーバ1や移動体4、移動体格納装置5がアプリケーションを起動可能なプロセッサと入出力装置を有し、各種設定等が可能な構成であってもよい。 <Example of movement route generation method>
With reference to FIG. 7, the travel route generation method according to this embodiment will be described, including the operation of the information processing system according to this embodiment. FIG. 7 illustrates a flowchart of the movement route generation method according to the present embodiment. Although this flowchart exemplarily shows a configuration in which an application is started on theuser terminal 2, the configuration is not limited to this. The configuration may include an input/output device and allow various settings and the like.
図7を参照して、本実施形態にかかる移動経路生成方法について、本実施の形態における情報処理システムの動作も含めて説明する。図7には、本実施形態にかかる移動経路生成方法のフローチャートが例示されている。このフローチャートでは、例示的にユーザ端末2上でアプリケーションを起動する構成を示しているが、これに限らず、例えば管理サーバ1や移動体4、移動体格納装置5がアプリケーションを起動可能なプロセッサと入出力装置を有し、各種設定等が可能な構成であってもよい。 <Example of movement route generation method>
With reference to FIG. 7, the travel route generation method according to this embodiment will be described, including the operation of the information processing system according to this embodiment. FIG. 7 illustrates a flowchart of the movement route generation method according to the present embodiment. Although this flowchart exemplarily shows a configuration in which an application is started on the
まず、ユーザは、例えばユーザ端末2において、三次元合成点群データ生成機能を含むアプリケーションを起動する(SQ101)。このアプリケーションは、例えばユーザ端末2に記憶されていてもよいし、ネットワークを介して接続される管理サーバ1または他のサーバ(不図示)から提供されるソフトウェア(いわゆるSaaS)であってもよい。必要に応じてログイン画面が表示され、例えばログインIDやパスワードを要求する構成にしてもよい。
First, the user starts an application including a three-dimensional composite point cloud data generation function, for example on the user terminal 2 (SQ101). This application may be stored in the user terminal 2, for example, or may be software (so-called SaaS) provided from the management server 1 or another server (not shown) connected via a network. A login screen may be displayed as necessary, and a configuration may be adopted in which, for example, a login ID and password are requested.
次に、ユーザは、新規の移動計画を作成する(SQ102)。例えば、「プラン名」や「エリア名」、「住所」などを設定して、ユーザ端末2上に、対象となる構造物内の三次元合成点群データを取得して表示し、新規の移動計画の作成を開始する。
Next, the user creates a new travel plan (SQ102). For example, you can set the "plan name", "area name", "address", etc., acquire and display the 3D composite point cloud data within the target structure on the user terminal 2, and create a new movement. Start creating a plan.
次に、ユーザは、移動体4の移動のための移動経路を生成する(SQ103)。例えば、ユーザ端末2上に表示される三次元合成点群データに対してユーザの選択操作により一以上のウェイポイント情報(例えば、ユーザ端末2上では緯度経度座標系で表現される)を設定する。そして、移動体4に三次元合成点群データ及びウェイポイント情報を送信し、移動体4にて三次元合成点群データ及びウェイポイント情報に基づいて既知の方法(例えば4つのウェイポイント間をそれぞれ直線にて結ぶ)により移動経路情報が生成される。
Next, the user generates a travel route for the movement of the mobile object 4 (SQ103). For example, one or more waypoint information (for example, expressed in the latitude and longitude coordinate system on the user terminal 2) is set by the user's selection operation for the three-dimensional composite point cloud data displayed on the user terminal 2. . Then, the three-dimensional composite point cloud data and waypoint information are transmitted to the mobile body 4, and the mobile body 4 uses a known method (for example, between each of the four waypoints) based on the three-dimensional composite point cloud data and the waypoint information. (Connecting with a straight line), movement route information is generated.
次に、ユーザは、移動体4に移動の実行開始を指示する(SQ104)。例えば、移動経路情報記憶部471及び移動情報記憶部472を参照して、点検、警備、建築進捗管理等を目的とする移動体4の移動を実行する。
Next, the user instructs the moving body 4 to start moving (SQ104). For example, with reference to the movement route information storage section 471 and the movement information storage section 472, movement of the mobile object 4 for purposes such as inspection, security, construction progress management, etc. is executed.
次に、ユーザは、ユーザ端末2へ取得情報の出力を指示する(SQ105)。例えば、ユーザ端末2上に表示される三次元合成点群データに移動体4が実際に移動した経路情報を重畳して表示してもよい。そのほか、移動経路上にて移動体4により取得された取得情報(静止画像、動画像、音声その他の情報)を表示したり、当該取得情報の位置情報に対応付けられた位置(特にウェイポイントの位置情報)に対応する取得情報を閲覧するためのリンクとなる記号などの印が付されてもよい。そして、当該リンクをユーザ端末2上で選択することで、対応する取得情報が表示されるようにしてもよい。
Next, the user instructs the user terminal 2 to output the acquired information (SQ105). For example, information on the route along which the mobile object 4 actually traveled may be displayed superimposed on the three-dimensional composite point cloud data displayed on the user terminal 2. In addition, the acquired information (still images, moving images, audio, and other information) acquired by the mobile object 4 on the movement route can be displayed, and the positions associated with the position information of the acquired information (especially waypoints) can be displayed. A mark such as a symbol that serves as a link for viewing acquired information corresponding to location information) may also be attached. Then, by selecting the link on the user terminal 2, the corresponding acquired information may be displayed.
このように、本発明は、構造物内外に跨る移動経路を含む自律移動の移動体の移動経路を設定可能な情報処理システム等を提供することができる。なお、上記のようにSQ104の移動体4の自律的な移動の実行を伴う構成に代えて、単に最適な移動経路を作成してユーザ端末2上で確認可能に表示するように構成してもよく、これに基づき他のユーザがプロポ等で手動で移動体4を構造物内で移動させる際のお手本となる移動経路を他のユーザのユーザ端末2上に表示することが可能となる。
As described above, the present invention can provide an information processing system and the like that can set a travel route for an autonomous mobile body, including a travel route that spans inside and outside of a structure. Note that instead of the above-described configuration in which the mobile object 4 moves autonomously in SQ104, it may be configured to simply create an optimal movement route and display it on the user terminal 2 for confirmation. Based on this, it becomes possible to display on the user terminal 2 of another user a movement route that serves as a model for when another user manually moves the mobile object 4 within the structure using a radio or the like.
また、上述の実施例では移動体4による構造物内外での情報取得を具体例としたが、例えば構造物の点検であってもよく、構造物の内壁および/または外壁の所定の事象の有無を点検するために利用される装置、機器等を備えていてもよい。より具体的には、撮像装置(可視光カメラ、赤外線カメラ、金属探知機、超音波測定器等)や、打鍵装置等、探知装置(金属探知機)、集音装置、臭気測定器、ガス検知器、空気汚染測定器、検出装置(宇宙線、放射線、電磁波等を検出するための装置)等の内壁や外壁を有する点検対象構造物の状態を知るために必要な装置は全て採用され得る。
Further, in the above-described embodiment, the acquisition of information inside and outside the structure by the moving object 4 was taken as a specific example, but it may also be an inspection of the structure, and the presence or absence of a predetermined event on the inner wall and/or outer wall of the structure may be used. It may also be equipped with equipment, equipment, etc. used for inspecting. More specifically, imaging devices (visible light cameras, infrared cameras, metal detectors, ultrasonic measuring devices, etc.), keying devices, detection devices (metal detectors), sound collection devices, odor measuring devices, gas detection devices, etc. All devices necessary to know the condition of a structure to be inspected having an inner wall or an outer wall, such as an air contamination measuring device, a detection device (device for detecting cosmic rays, radiation, electromagnetic waves, etc.), etc., can be employed.
また、実施例は例えば構造物内の警備や監視であってもよく、警備や監視のために利用される装置、機器等を備えていてもよい。より具体的には、撮像装置(可視光カメラ、赤外線カメラ、暗視カメラ、金属探知機、超音波測定器等)や、センサ装置(モーションセンサ、赤外線センサ等)等、警備・監視対象構造物の異常や侵入者等を撮像・検知するために必要な装置は全て採用され得る。
Further, the embodiment may be, for example, security or monitoring inside a structure, and may include devices, equipment, etc. used for security or monitoring. More specifically, structures to be guarded and monitored, such as imaging devices (visible light cameras, infrared cameras, night vision cameras, metal detectors, ultrasonic measuring instruments, etc.) and sensor devices (motion sensors, infrared sensors, etc.) All devices necessary to image and detect abnormalities, intruders, etc. can be employed.
本発明の移動体は、カメラ等を搭載した撮影用の移動体としても好適に使用することができる他、セキュリティ分野、インフラ監視、測量、スポーツ会場・工場・倉庫等の建物や構造物内の点検、災害対応等の様々な産業にも利用することができる。
The mobile object of the present invention can be suitably used as a mobile object for photographing equipped with a camera, etc., and can also be used in the security field, infrastructure monitoring, surveying, and in buildings and structures such as sports venues, factories, warehouses, etc. It can also be used in various industries such as inspection and disaster response.
上述した実施の形態は、本発明の理解を容易にするための例示に過ぎず、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良することができると共に、本発明にはその均等物が含まれることは言うまでもない。
The embodiments described above are merely illustrative to facilitate understanding of the present invention, and are not intended to be interpreted as limiting the present invention. It goes without saying that the present invention can be modified and improved without departing from its spirit, and that the present invention includes equivalents thereof.
1 管理サーバ
2 ユーザ端末
4 移動体
5 移動体格納装置
1Management server 2 User terminal 4 Mobile object 5 Mobile object storage device
2 ユーザ端末
4 移動体
5 移動体格納装置
1
Claims (10)
- 少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成部と、
前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える、
ことを特徴とする情報処理システム。 Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. a three-dimensional composite point cloud data generation unit that generates three-dimensional composite point cloud data;
a moving route generation unit that generates moving route information indicating a moving route for a moving body that spans inside and outside of the structure based on the three-dimensional composite point group data;
An information processing system characterized by: - 前記三次元構造物内部点群データは、少なくとも構造物内部の構成物の配置を示す三次元構造物内モデルデータの少なくともモデル表面が点群化された点群データである、
ことを特徴とする請求項1に記載の情報処理システム。 The three-dimensional structure internal point cloud data is point cloud data in which at least the model surface of the three-dimensional structure internal model data indicating at least the arrangement of components inside the structure is formed into a point cloud.
The information processing system according to claim 1, characterized in that: - 前記三次元構造物内モデルデータは、BIMデータまたはCIMデータである、
ことを特徴とする請求項2に記載の情報処理システム。 The three-dimensional structure internal model data is BIM data or CIM data.
The information processing system according to claim 2, characterized in that: - 前記三次元構造物外点群データは、少なくとも構造物外部の構成物の配置を示す三次元構造物外モデルデータの少なくともモデル表面が点群化された点群データである、
ことを特徴とする請求項1ないし3のいずれかに記載の情報処理システム。 The point cloud data outside the three-dimensional structure is point cloud data in which at least the model surface of the three-dimensional outside structure model data indicating at least the arrangement of components outside the structure is converted into a point cloud.
The information processing system according to any one of claims 1 to 3, characterized in that: - 前記三次元構造物外モデルデータは、CityGMLデータである、
ことを特徴とする請求項4に記載の情報処理システム。 The three-dimensional structure external model data is CityGML data,
5. The information processing system according to claim 4. - 前記三次元構造物内部点群データ及び前記三次元構造物外点群データの少なくともいずれかは、事前に前記構造物内でセンサを移動させて取得された点群データである、
ことを特徴とする請求項1に記載の情報処理システム。 At least one of the point group data inside the three-dimensional structure and the point group data outside the three-dimensional structure is point group data obtained by moving a sensor within the structure in advance.
The information processing system according to claim 1, characterized in that: - 前記三次元構造物内部点群データ及び前記三次元構造物外点群データの少なくともいずれかは、対応する三次元構造物モデルデータ内で仮想センサを移動させて取得された点群データである、
ことを特徴とする請求項1に記載の情報処理システム。 At least one of the three-dimensional structure internal point group data and the three-dimensional structure external point group data is point group data obtained by moving a virtual sensor within the corresponding three-dimensional structure model data.
The information processing system according to claim 1, characterized in that: - 少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して生成された三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成部と、を備える、
ことを特徴とする移動体。 Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. a movement path generation unit that generates movement path information indicating a movement path for a moving object that spans inside and outside of the structure, based on the generated three-dimensional composite point group data;
A mobile object characterized by: - 三次元合成点群データ生成部により、少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成するステップと、
移動経路生成部により、前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成するステップと、
をコンピュータに実行させることを特徴とする情報処理方法。 The three-dimensional composite point cloud data generation unit generates three-dimensional structure internal point cloud data indicating at least the arrangement of components inside the structure, and three-dimensional structure external point cloud data indicating at least the arrangement of components outside the structure. a step of composing the point cloud data with each other to generate three-dimensional composite point cloud data;
a step of generating movement path information indicating a movement path for the mobile body spanning inside and outside of the structure, based on the three-dimensional composite point group data, by a movement path generation unit;
An information processing method characterized by causing a computer to execute. - 少なくとも構造物の内部の構成物の配置を示す三次元構造物内部点群データと、少なくとも前記構造物の外部の構成物の配置を示す三次元構造物外部点群データと、を互いに合成して三次元合成点群データを生成する三次元合成点群データ生成機能と、
前記三次元合成点群データに基づき、移動体のための前記構造物の内外に跨る移動経路を示す移動経路情報を生成する移動経路生成機能と、
をコンピュータに実現することを特徴とするプログラム。
Three-dimensional structure internal point group data indicating at least the arrangement of components inside the structure and three-dimensional structure external point group data indicating at least the arrangement of components outside the structure are combined with each other. A 3D composite point cloud data generation function that generates 3D composite point cloud data,
a travel route generation function that generates travel route information indicating a travel route for a mobile object that spans inside and outside of the structure based on the three-dimensional composite point group data;
A program characterized by realizing this on a computer.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022551364A JP7170369B1 (en) | 2022-04-14 | 2022-04-14 | Information processing system and mobile body, information processing method, and program |
| PCT/JP2022/017830 WO2023199477A1 (en) | 2022-04-14 | 2022-04-14 | Information processing system, mobile body, information processing method, and program |
| JP2022170271A JP2023157826A (en) | 2022-04-14 | 2022-10-25 | Information processing system, movable body, information processing method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/017830 WO2023199477A1 (en) | 2022-04-14 | 2022-04-14 | Information processing system, mobile body, information processing method, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023199477A1 true WO2023199477A1 (en) | 2023-10-19 |
Family
ID=84027200
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/017830 WO2023199477A1 (en) | 2022-04-14 | 2022-04-14 | Information processing system, mobile body, information processing method, and program |
Country Status (2)
| Country | Link |
|---|---|
| JP (2) | JP7170369B1 (en) |
| WO (1) | WO2023199477A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010164434A (en) * | 2009-01-15 | 2010-07-29 | Hitachi Ltd | Spatial information managing system, map information server apparatus and program |
| WO2021199449A1 (en) * | 2020-04-03 | 2021-10-07 | 株式会社センシンロボティクス | Position calculation method and information processing system |
| JP2021189600A (en) * | 2020-05-27 | 2021-12-13 | シンメトリー・ディメンションズ・インク | Model generation device, learner generation device, model generation method, and learner generation method |
-
2022
- 2022-04-14 WO PCT/JP2022/017830 patent/WO2023199477A1/en active Application Filing
- 2022-04-14 JP JP2022551364A patent/JP7170369B1/en active Active
- 2022-10-25 JP JP2022170271A patent/JP2023157826A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010164434A (en) * | 2009-01-15 | 2010-07-29 | Hitachi Ltd | Spatial information managing system, map information server apparatus and program |
| WO2021199449A1 (en) * | 2020-04-03 | 2021-10-07 | 株式会社センシンロボティクス | Position calculation method and information processing system |
| JP2021189600A (en) * | 2020-05-27 | 2021-12-13 | シンメトリー・ディメンションズ・インク | Model generation device, learner generation device, model generation method, and learner generation method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023157826A (en) | 2023-10-26 |
| JPWO2023199477A1 (en) | 2023-10-19 |
| JP7170369B1 (en) | 2022-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11914369B2 (en) | Multi-sensor environmental mapping | |
| US10599149B2 (en) | Salient feature based vehicle positioning | |
| CN107209514B (en) | Selective processing of sensor data | |
| US10691141B2 (en) | Systems and methods for surveillance with a visual marker | |
| JP6487010B2 (en) | Method for controlling an unmanned aerial vehicle in a certain environment, method for generating a map of a certain environment, system, program, and communication terminal | |
| US20200026720A1 (en) | Construction and update of elevation maps | |
| CN107850902B (en) | Camera configuration on a movable object | |
| JP7118490B1 (en) | Information processing system, information processing method, program, mobile object, management server | |
| JP6730763B1 (en) | Flight body flight path creation method and management server | |
| WO2022264413A1 (en) | Mobile body movement path generation method and program, management server, and management system | |
| WO2023199477A1 (en) | Information processing system, mobile body, information processing method, and program | |
| WO2023228283A1 (en) | Information processing system, movable body, information processing method, and program | |
| JP7072311B1 (en) | Movement route generation method and program of moving object, management server, management system | |
| JP7441579B1 (en) | Information processing system and information processing method | |
| JP2020135327A (en) | Flight body system, flight body, position measuring method and program | |
| KR20220031574A (en) | 3D positioning and mapping system and method | |
| JP2021067670A (en) | Method of creating flight route for flying object and management server | |
| JP2023087623A (en) | Information processing system, information processing method, program, movable body, and management server |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022551364 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22937456 Country of ref document: EP Kind code of ref document: A1 |