KR20200065499A - Dancing Robot that learns the relationship between dance and music - Google Patents
Dancing Robot that learns the relationship between dance and music Download PDFInfo
- Publication number
- KR20200065499A KR20200065499A KR1020180152027A KR20180152027A KR20200065499A KR 20200065499 A KR20200065499 A KR 20200065499A KR 1020180152027 A KR1020180152027 A KR 1020180152027A KR 20180152027 A KR20180152027 A KR 20180152027A KR 20200065499 A KR20200065499 A KR 20200065499A
- Authority
- KR
- South Korea
- Prior art keywords
- music
- dance
- robot
- data storage
- correlation
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/003—Manipulators for entertainment
- B25J11/0035—Dancing, executing a choreography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/003—Controls for manipulators by means of an audio-responsive input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
Abstract
Description
본 발명은 음악과 춤의 특징을 추출하여 그에 대한 상관관계를 학습하여 춤을 추는 로봇에 관한 것이다.The present invention relates to a robot that dances by extracting the characteristics of music and dance and learning the correlation therewith.
최근 들어 기술 발전과 더불어 로봇에 대한 관심이 집중되면서 여러 가지 용도의 로봇이 개발되고 있다. 지능형로봇으로의 진보화 되면서 다양한 발전이 있었는데, 예를 들어, 애완견 로봇이라든지, 휴머노이드형으로 걷기 및 춤추는 로봇등이 개발되고 있다.In recent years, with the development of technology, interest in robots has been focused, and robots for various purposes have been developed. As advancement to an intelligent robot, various developments have been made. For example, a pet dog robot or a humanoid type walking and dancing robot has been developed.
일반적으로 종래의 로봇 장난감, 특히 음악 및 소리에 춤추는 로봇 경향은 단순표현에 주력하는편이다.In general, the trend of conventional robot toys, especially robots dancing to music and sound, is focused on simple expression.
상기 종래의 로봇 장난감은 단순히 몸동작이 좌우상하로 움직이거나 몸이 고정 되어 있거나 끈으로 묶여서 흔들이는 단순동작에 그쳤기 때문에 로봇완구로서의 감정 표출이 이루어지지 않아 생동감이 미흡한 감이 있었다.Since the conventional robot toy is merely a simple motion in which the body motion moves up and down, the body is fixed, or is shaken by being tied with a string, there is a feeling of lack of vitality due to the lack of emotion expression as a robot toy.
이러한 로봇 장난감의 수요계층인 아동 및 성인의 장식 품류들의 경우 의식수준이 높아지면서 상기 종래의 로봇 장난감은 놀이효과의 한계성 및 작동 상의 단조로움에 일소하였다.In the case of decorative items of children and adults, which are the demand layer of the robot toys, the level of consciousness is increased, and the conventional robot toys have eliminated the limitations of play effect and the monotony in operation.
또한, 종래의 춤추는 로봇은 단순히 외부의 자극(예; 소리, 터치등)을 감지하여 미리 설정된 춤 동작으로 춤을 추도록 하는 정도이다. 즉, 춤 동작을 미리 설정하여 두고 음원과는 상관없이 미리 세팅된 동작으로 춤을 추도록 하고 있다.In addition, the conventional dancing robot is simply a degree to detect an external stimulus (eg, sound, touch, etc.) to dance with a preset dance action. That is, the dance action is set in advance, and the dance is performed with the preset motion regardless of the sound source.
예를 들면, 공개특허 10-2008-0075269 댄스(dance) 음원의 곡을 메모리(memory)에 기억하고, 내장하는 음원에 따라서 댄스(dance) 음원을 흘리면서, 곡에 합쳐서 로봇(robot) 완구가 춤추는 것이다. 그렇지만, 이와 같은 로봇(robot) 완구는,손이나 발을 요동하고, 또는 개폐하는 것 같은 비교적 단순한 움직임의 반복이기 때문에 사용자가 쉽게 실증을 느끼게 되는 문제가 있다.For example, the memory of a dance sound source is stored in a memory, and a dance sound source is flowed according to a sound source to be built, and the robot toy is combined with the song. will be. However, such a robot toy has a problem in that the user can easily feel the demonstration because it is a repetition of a relatively simple movement, such as shaking or opening or closing a hand or foot.
따라서 본 발명은 상기와 같은 문제점을 해결하기 위한 것으로 음악의 주파수 특성과 영상에서의 안무 데이터를 학습하여 들려주는 음악에 어울리는 춤을 추는 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇을 제공함에 있다.Therefore, the present invention is to solve the above problems and to provide a robot that dances by learning the correlation between dance and music that matches the music that is heard by learning the frequency characteristics of music and choreography data in images. have.
상기의 목적을 이루기 위한 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇은, 사람형상을 하여 사람의 각 관절에 해당하는 부위를 모터(10)로 제어하여 춤을 추도록 할 수 있는 로봇(1)에 있어서, 음악을 입력받는 마이크(100); 음악과 춤의 상관관계를 학습한 데이터가 저장된 데이터저장부(200); 상기 데이터저장부(200)와 유, 무선 통신하여 음악이나 춤 영상 데이터를 입력하여 상기 데이터저장부(200)에 저장될 수 있도록 하는 데이터입력부(300) 및 상기 모터(10), 상기 마이크(100) 및 상기 데이터저장부(200)와 연결되어 상기 마이크(100)로부터 입력받은 음악에 맞추어 춤을 추도록 제어하는 제어부(400)를 포함하는 것을 특징으로 한다.The robot for dancing by learning the correlation between music and dance according to the present invention for achieving the above object has a human shape, and controls a part corresponding to each joint of a person with a
본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇은 음악과 신체동작 안무의 상관관계를 학습하여 새로운 음악을 들려주어도 그에 알맞은 춤을 출 수있는 효과를 갖고 있다.The robot that dances by learning the correlation between music and dance according to the present invention has the effect of learning the correlation between music and physical movement choreography and dancing appropriately even when new music is heard.
도 1은 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 구성도이다.
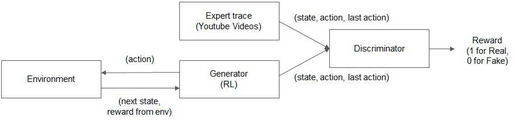
도 2는 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 음악과 춤의 상관관계를 학습하는 강화학습과 GAN을 접목한 딥러닝 기계학습의 구조이다.
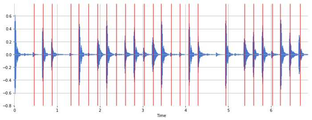
도 3은 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 추출 성분 중 하나인 템포 그래프이다.
도 4는 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 추출 성분 중 하나인 음색 그래프이다.
도 5는 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 추출 성분 중 하나인 박자 그래프이다.
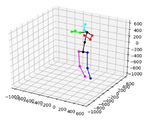
도 6은 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 실시 예로 관절에 따른 좌표를 지정하는 것을 보여주는 그래프이다.1 is a configuration diagram of a robot that dances by learning the correlation between music and dance according to the present invention.
2 is a structure of a deep learning machine learning incorporating reinforcement learning and GAN learning the correlation between music and dance of a dancing robot by learning the correlation between music and dance according to the present invention.
3 is a tempo graph which is one of the extraction components of a robot dancing by learning the correlation between music and dance according to the present invention.
Figure 4 is a tone graph that is one of the extraction components of the dancing robot by learning the correlation between music and dance according to the present invention.
5 is a time signature graph that is one of the extraction components of a robot dancing by learning a correlation between music and dance according to the present invention.
6 is a graph showing designating coordinates according to joints as an example of a robot dancing by learning a correlation between music and dance according to the present invention.
이하에서는, 본 발명의 실시 예에 따른 도면을 참조하여 설명하지만, 이는 본 발명의 더욱 용이한 이해를 위한 것으로, 본 발명의 범주가 그것에 의해 한정되는 것은 아니다.Hereinafter, with reference to the drawings according to an embodiment of the present invention, this is for easier understanding of the present invention, and the scope of the present invention is not limited thereto.
명세서 전체에서 어떤 부분이 어떤 구성요소를 "포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있음을 의미한다. 또한, 명세서에 기재된 "... 부", "모듈" 등의 용어는 적어도 하나의 기능이나 동작을 처리하는 단위를 의미하며, 이는 하드웨어 또는 소프트웨어로 구현되거나 하드웨어와 소프트웨어의 결합으로 구현될 수 있다.When a part of the specification "includes" a certain component, this means that other components may be further included instead of excluding other components, unless specifically stated to the contrary. In addition, terms such as "... sub" and "module" described in the specification mean a unit that processes at least one function or operation, which may be implemented in hardware or software, or a combination of hardware and software. .
명세서 전체에서, 어떤 부분이 다른 부분과 "연결"되어 있다고 할 때, 이는 "직접적으로 연결"되어 있는 경우뿐 아니라, 그 중간에 다른 소자를 사이에 두고 "전기적으로 연결"되어 있는 경우도 포함한다.Throughout the specification, when a part is "connected" to another part, this includes not only "directly connected" but also "electrically connected" with another element in between. .
본 명세서에 있어서는 어느 하나의 구성요소가 다른 구성요소로 데이터 또는 신호를 '전송'하는 경우에는 구성요소는 다른 구성요소로 직접 상기 데이터 또는 신호를 전송할 수 있고, 적어도 하나의 또 다른 구성요소를 통하여 데이터 또는 신호를 다른 구성요소로 전송할 수 있음을 의미한다.In the present specification, when one component'transmits' data or a signal to another component, the component may directly transmit the data or signal to another component, and through at least one other component This means that data or signals can be transmitted to other components.
설명에 앞서 본 명세서에는 다수의 양태 및 실시양태가 기술되며, 이들은 단순히 예시적인 것으로서 한정하는 것이 아니다.Prior to the description, a number of aspects and embodiments are described herein, and these are merely illustrative and not limiting.
본 명세서를 읽은 후에, 숙련자는 다른 양태 및 실시예가 본 발명의 범주로부터 벗어남이 없이 가능함을 이해할 것이다.After reading this specification, skilled artisans will appreciate that other aspects and embodiments are possible without departing from the scope of the invention.
이하에서 설명되는 실시양태의 상세 사항을 다루기 전에, 몇몇 용어를 정의하거나 또는 명확히 하기로 한다.Before addressing the details of the embodiments described below, some terms will be defined or clarified.
GAN이란 Generative Adversarial Network의 약자로 생성적 적대 신경망이라고도 한다. 또한, 비 지도 학습에 사용되는 인공 지능 알고리즘으로, 제로섬 게임 틀 안에서 서로 경쟁하는 두 개의 신경 네트워크 시스템에 의해 구현된다.GAN stands for Generative Adversarial Network, and is also known as a generative hostile neural network. In addition, it is an artificial intelligence algorithm used for unsupervised learning, and is implemented by two neural network systems competing with each other in a zero-sum game framework.
도 1은 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 구성도이고, 도 2는 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 음악과 춤의 상관관계를 학습하는 강화학습과 GAN을 접목한 딥러닝 기계학습의 구조이고, 도 3은 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 추출 성분 중 하나인 템포 그래프이고, 도 4는 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 추출 성분 중 하나인 음색 그래프이고, 도 5는 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 추출 성분 중 하나인 박자 그래프이고, 도 6은 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇의 실시 예로 관절에 따른 좌표를 지정하는 것을 보여주는 그래프이다.1 is a configuration diagram of a robot dancing by learning the correlation between music and dance according to the present invention, and FIG. 2 is a diagram showing the relationship between music and dancing according to the present invention and dancing robot It is a structure of deep learning machine learning that combines reinforcement learning to learn correlation and GAN, and FIG. 3 is a tempo graph that is one of extraction components of a robot dancing by learning the correlation between music and dance according to the present invention, Figure 4 is a tone graph that is one of the extraction components of the robot dancing by learning the correlation between music and dance according to the present invention, and Figure 5 is a robot dancing by learning the correlation between music and dance according to the present invention It is a time signature graph which is one of the extraction components of, and FIG. 6 is a graph showing designating coordinates according to joints as an example of a robot dancing by learning a correlation between music and dance according to the present invention.
본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇은, 사람형상을 하여 사람의 각 관절에 해당하는 부위를 모터(10)로 제어하여 춤을 추도록 할 수 있는 로봇(1)에 있어서, 음악을 입력받는 마이크(100); 음악과 춤의 상관관계를 학습한 데이터가 저장된 데이터저장부(200); 상기 데이터저장부(200)와 유, 무선 통신하여 음악이나 춤 영상 데이터를 입력하여 상기 데이터저장부(200)에 저장될 수 있도록 하는 데이터입력부(300) 및 상기 모터(10), 상기 마이크(100) 및 상기 데이터저장부(200)와 연결되어 상기 마이크(100)로부터 입력받은 음악에 맞추어 춤을 추도록 제어하는 제어부(400)를 포함하는 것을 특징으로 한다.The robot that dances by learning the correlation between music and dance according to the present invention is a robot (1) that is shaped like a person and controls a part corresponding to each joint of a person with a motor (10) to dance. In, The
또한, 상기 마이크(100) 및 상기 데이터입력부(300)를 통해 입력받은 음악으로부터 음악의 특징을 추출하는 음악특징추출부(500)를 더 포함하고, 상기 음악특징추출부(500)는 추출한 음악의 특징을 상기 데이터저장부(200)로 전송하는 것을 특징으로 한다.In addition, the
또한, 상기 제어부(400)와 연결되어 상기 제어부(400)가 제어할 수 있는 카메라(700)를 더 포함하고, 상기 데이터입력부(300)를 통해 입력받은 춤 영상 또는 상기 카메라(700)를 통해 촬영한 무용수의 춤으로부터 춤의 특징을 추출하는 춤특징추출부(600)를 더 포함하고, 상기 춤특징추출부(600)는 추출한 음악의 특징을 상기 데이터저장부(200)로 전송하는 것을 특징으로 한다.In addition, the
다음은 도 1 내지 도 6을 참조하여 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇에 대해 상세히 설명하도록 한다.Next, with reference to FIGS. 1 to 6 to learn the correlation between music and dance according to the present invention will be described in detail with respect to the dancing robot.
도 2는 음악과 춤의 상관관계를 학습하는 강화학습과 GAN을 접목한 딥러닝 기계학습의 구조로, 데이터입력부(300)를 통해 춤 안무 영상을 입력하는 경우에 학습 데이터는 Youtube와 같은 인터넷 스트리밍사이트의 춤 동영상으로부터 음악특징추출부(500)에서 음악의 특징, 춤특징추출부(600)에서 춤의 특징을 추출한다. 상기 음악에서는 템포, 박자 및 음색 등을 특징으로써 추출한다.2 is a structure of deep learning machine learning that combines reinforcement learning and GAN to learn the correlation between music and dance, and learning data is streaming through the Internet such as Youtube when inputting a dance choreography video through the
다음은 로봇이 춤을 출 때에 대해 상세히 설명하자면, 로봇이 춤을 추는 것을 제어부(400)가 관절의 움직임으로 춤을 추게 할 수 있다. 이때, 로봇의 각 관절마다 번호를 붙이고, 각 관절의 각도가 xyz축에 대해 얼마만큼 회전했는지를 통해 관절의 움직임을 설명할 수 있다. 또는 기준 위치를 정하고 그 기준위치에 대해 각 관절이 어디로 위치하는지를 통해 관절의 움직임을 표현할 수 있다.Next, to describe in detail when the robot dances, the
또한, 영상에서 3D Pose Estimation 기법을 이용하여 인체 관절 정보(skeleton data)를 추출한 것을 딥러닝 훈련용 동작 데이터로 활용한다. 이때 오픈소스 도구를 사용할 수 있으며, 상기 오픈소스 도구 또한 딥러닝 기법을 활용하여 이미지로 부터 인체를 분리하고 분리된 인체의 각 뼈대가 3차원 공간 상에 어떻게 위치하고 있는지를 추정하여 각 관절의 위치값을 (벡터)데이터로 출력한다. 이러한 관절의 위치 값은 도 6에서 확인할 수 있듯, 17개의 관절을 (x,y,z) 좌표로 표현하여 움직일 수 있다.In addition, the human joint information (skeleton data) extracted using 3D Pose Estimation technique from the image is used as motion data for deep learning training. At this time, an open source tool can be used, and the open source tool also uses a deep learning technique to separate the human body from the image and estimate how each skeleton of the separated human body is located in the 3D space. Output as (vector) data. As shown in FIG. 6, the position values of these joints can be moved by expressing 17 joints with (x,y,z) coordinates.
다음은 도 3 내지 도 5를 참조하여 본 발명에 따른 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇이 추출하는 음악 성분에 대해 상세히 설명하도록 한다.Next, with reference to FIGS. 3 to 5, the correlation between music and dance according to the present invention will be described to describe in detail the music components extracted by the dancing robot.
음악의 3가지 종류의 추출 성분을 사용한다. 첫번째는 전체적인 흐름에서 얼마나 빨리 춤을 춰야 하는지 알려주는 템포이고, 두번째는 어떤 유형의 춤을 춰야하는지 알려주는 박자이고, 마지막으로 춤의 세부적인 부분을 묘사하는 MFCC (음색), Spectral Centroid (소리의 밝기), STFT (각 프레임에서의 푸리에 변환), Chroma (각 음에서의 에너지), Constant Q-transform, Mel-spectrogram이 있다.It uses three types of extracting ingredients from music. The first is a tempo that tells you how fast to dance in the overall flow, the second is a beat that tells you what type of dance you should dance to, and finally the MFCC (voice), Spectral Centroid (sound of sound) that describes the details of the dance. Brightness), STFT (Fourier Transform at each frame), Chroma (Energy at each note), Constant Q-transform, and Mel-spectrogram.
이상 본 발명의 실시 예에 따른 도면을 참조하여 설명하였지만, 본 발명이 속한 분야에서 통상의 지식을 가진 자라면 상기 내용을 바탕으로 본 발명의 범주 내에서 다양한 응용 및 변형을 행하는 것이 가능할 것이다.Although described above with reference to the drawings according to embodiments of the present invention, those skilled in the art to which the present invention pertains will be able to perform various applications and modifications within the scope of the present invention based on the above.
1 : 로봇
10 : 모터
100 : 마이크
200 : 데이터저장부
300 : 데이터입력부
400 : 제어부
500 : 음악특징추출부
600 : 춤특징추출부
700 : 카메라1: Robot
10: motor
100: microphone
200: data storage
300: data input unit
400: control unit
500: Music feature extraction unit
600: Dance feature extraction unit
700: camera
Claims (3)
음악을 입력받는 마이크(100);
음악과 춤의 상관관계를 학습한 데이터가 저장된 데이터저장부(200);
상기 데이터저장부(200)와 유, 무선 통신하여 음악이나 춤 영상 데이터를 입력하여 상기 데이터저장부(200)에 저장될 수 있도록 하는 데이터입력부(300) 및
상기 모터(10), 상기 마이크(100) 및 상기 데이터저장부(200)와 연결되어 상기 마이크(100)로부터 입력받은 음악에 맞추어 춤을 추도록 제어하는 제어부(400)를 포함하는 것을 특징으로 하는 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇.
In the robot (1) that can be made to dance by controlling the part corresponding to each joint of the person by a motor (10) to form a person,
A microphone 100 for receiving music;
A data storage unit 200 storing data learning the correlation between music and dance;
A data input unit 300 for wired and wireless communication with the data storage unit 200 to input music or dance image data to be stored in the data storage unit 200 and
Characterized in that it comprises a control unit (400) connected to the motor (10), the microphone (100) and the data storage unit (200) to control dancing to the music received from the microphone (100). A robot that learns the relationship between music and dance and dances.
상기 마이크(100) 및 상기 데이터입력부(300)를 통해 입력받은 음악으로부터 음악의 특징을 추출하는 음악특징추출부(500)를 더 포함하고,
상기 음악특징추출부(500)는 추출한 음악의 특징을 상기 데이터저장부(200)로 전송하는 것을 특징으로 하는 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇.
The method according to claim 1,
Further comprising a music feature extraction unit 500 for extracting the characteristics of the music from the music received through the microphone 100 and the data input unit 300,
The music feature extraction unit 500 is a robot that learns and dances the correlation between music and dance, characterized in that the characteristics of the extracted music are transmitted to the data storage unit 200.
상기 제어부(400)와 연결되어 상기 제어부(400)가 제어할 수 있는 카메라(700)를 더 포함하고,
상기 데이터입력부(300)를 통해 입력받은 춤 영상 또는 상기 카메라(700)를 통해 촬영한 무용수의 춤으로부터 춤의 특징을 추출하는 춤특징추출부(600)를 더 포함하고,
상기 춤특징추출부(600)는 추출한 음악의 특징을 상기 데이터저장부(200)로 전송하는 것을 특징으로 하는 음악과 춤의 상관관계를 학습하여 춤을 추는 로봇.
The method according to claim 1,
It is connected to the control unit 400 further includes a camera 700 that can be controlled by the control unit 400,
Further comprising a dance feature extraction unit 600 for extracting the characteristics of the dance from the dance image received through the camera 700 or the dance image received through the data input unit 300,
The dance feature extracting unit 600 is a robot that learns and dances the correlation between music and dance, characterized in that the characteristics of the extracted music are transmitted to the data storage unit 200.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180152027A KR102171428B1 (en) | 2018-11-30 | 2018-11-30 | Dancing Robot that learns the relationship between dance and music |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180152027A KR102171428B1 (en) | 2018-11-30 | 2018-11-30 | Dancing Robot that learns the relationship between dance and music |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200065499A true KR20200065499A (en) | 2020-06-09 |
| KR102171428B1 KR102171428B1 (en) | 2020-10-29 |
Family
ID=71082401
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180152027A KR102171428B1 (en) | 2018-11-30 | 2018-11-30 | Dancing Robot that learns the relationship between dance and music |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102171428B1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114211485A (en) * | 2021-12-07 | 2022-03-22 | 深圳市优必选科技股份有限公司 | Robot dance control method and device, robot and storage medium |
| KR20220122201A (en) * | 2021-02-26 | 2022-09-02 | 주식회사지능디자인 | Dancing smart robot studied dance gesture |
| KR102449765B1 (en) * | 2021-05-26 | 2022-09-29 | 한국로봇융합연구원 | Apparatus for constructing kinematic information of robot manipulator and method therefor |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005231012A (en) * | 2004-02-23 | 2005-09-02 | Sony Corp | Robot device and its control method |
| KR20080075275A (en) * | 2007-02-12 | 2008-08-18 | 박진규 | Robot for dancing by music |
| KR20080075269A (en) | 2007-02-12 | 2008-08-18 | (주)아이티시에스 | Humanoid robot for dancing |
| KR20130044430A (en) | 2011-10-24 | 2013-05-03 | 백민선 | Roly-poly robot dance |
| KR20140071588A (en) | 2012-12-04 | 2014-06-12 | 장준영 | A method that dance a robot by matching music and motion of robot |
-
2018
- 2018-11-30 KR KR1020180152027A patent/KR102171428B1/en active IP Right Grant
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005231012A (en) * | 2004-02-23 | 2005-09-02 | Sony Corp | Robot device and its control method |
| KR20080075275A (en) * | 2007-02-12 | 2008-08-18 | 박진규 | Robot for dancing by music |
| KR20080075269A (en) | 2007-02-12 | 2008-08-18 | (주)아이티시에스 | Humanoid robot for dancing |
| KR20130044430A (en) | 2011-10-24 | 2013-05-03 | 백민선 | Roly-poly robot dance |
| KR20140071588A (en) | 2012-12-04 | 2014-06-12 | 장준영 | A method that dance a robot by matching music and motion of robot |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220122201A (en) * | 2021-02-26 | 2022-09-02 | 주식회사지능디자인 | Dancing smart robot studied dance gesture |
| KR102449765B1 (en) * | 2021-05-26 | 2022-09-29 | 한국로봇융합연구원 | Apparatus for constructing kinematic information of robot manipulator and method therefor |
| CN114211485A (en) * | 2021-12-07 | 2022-03-22 | 深圳市优必选科技股份有限公司 | Robot dance control method and device, robot and storage medium |
| CN114211485B (en) * | 2021-12-07 | 2024-05-17 | 深圳市优必选科技股份有限公司 | Robot dance control method and device, robot and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102171428B1 (en) | 2020-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021169431A1 (en) | Interaction method and apparatus, and electronic device and storage medium | |
| JP4086024B2 (en) | Robot apparatus and behavior control method thereof | |
| US8321221B2 (en) | Speech communication system and method, and robot apparatus | |
| JP3714268B2 (en) | Robot device | |
| US7216082B2 (en) | Action teaching apparatus and action teaching method for robot system, and storage medium | |
| TW581959B (en) | Robotic (animal) device and motion control method for robotic (animal) device | |
| JP7400923B2 (en) | Information processing device and information processing method | |
| US7987091B2 (en) | Dialog control device and method, and robot device | |
| KR20200065499A (en) | Dancing Robot that learns the relationship between dance and music | |
| Aucouturier et al. | Cheek to chip: Dancing robots and AI's future | |
| JP7227395B2 (en) | Interactive object driving method, apparatus, device, and storage medium | |
| JP7205148B2 (en) | ROBOT, CONTROL METHOD AND PROGRAM | |
| JP2002049385A (en) | Voice synthesizer, pseudofeeling expressing device and voice synthesizing method | |
| KR20060079832A (en) | Humanoid robot using emotion expression based on the embedded system | |
| Augello et al. | Creative robot dance with variational encoder | |
| JP4179230B2 (en) | Robot apparatus and operation control method thereof | |
| KR20210020312A (en) | Robot and method for controlling same | |
| Vogt et al. | Learning two-person interaction models for responsive synthetic humanoids | |
| Tanaka et al. | Plans for developing real-time dance interaction between QRIO and toddlers in a classroom environment | |
| JP2003340760A (en) | Robot device and robot control method, recording medium and program | |
| Yang et al. | Humanoid robot magic show performance | |
| JP2005231012A (en) | Robot device and its control method | |
| TWI412393B (en) | Robot | |
| ANGEL FERNANDEZ | TheatreBot: Studying emotion projection and emotion enrichment system for autonomous theatrical robot | |
| WO2023037608A1 (en) | Autonomous mobile body, information processing method, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E701 | Decision to grant or registration of patent right |