JP6978453B2 - Management device, management method and management system - Google Patents
Management device, management method and management system Download PDFInfo
- Publication number
- JP6978453B2 JP6978453B2 JP2019027422A JP2019027422A JP6978453B2 JP 6978453 B2 JP6978453 B2 JP 6978453B2 JP 2019027422 A JP2019027422 A JP 2019027422A JP 2019027422 A JP2019027422 A JP 2019027422A JP 6978453 B2 JP6978453 B2 JP 6978453B2
- Authority
- JP
- Japan
- Prior art keywords
- operator
- robot
- state
- determination unit
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
Description
本発明は、ロボットを操作する操作者の適性度を管理するための管理装置、管理方法及び管理システムに関する。 The present invention relates to a management device, a management method, and a management system for managing the suitability of an operator who operates a robot.
操作装置を用いてロボットを動かすための操作をするためのシステムが知られている。特許文献1には、操作者が操作するロボットの利用者が操作者の操作内容を評価することが開示されている。
A system for performing an operation for moving a robot using an operating device is known.
ロボットの利用者が操作者を評価する場合、利用者が視認できた事象に基づいて操作者を評価する。しかしながら、利用者が、視認できた事象に基づいて操作者を評価する場合、評価する際に重要な事象を見落としてしまったり、主観的な評価をしてしまったりするというおそれがあり、利用者による評価結果が適切でないということが生じ得る。 When the user of the robot evaluates the operator, the operator is evaluated based on the event that the user can see. However, when the user evaluates the operator based on the visually recognizable event, there is a risk that an important event may be overlooked or a subjective evaluation may be made at the time of evaluation. It is possible that the evaluation result by is not appropriate.
そこで、本発明はこれらの点に鑑みてなされたものであり、ロボットの操作者の適性度の推定精度を向上させることを目的とする。 Therefore, the present invention has been made in view of these points, and an object thereof is to improve the estimation accuracy of the suitability of the robot operator.
本発明の第1の態様の管理装置は、ロボットを操作する操作者を管理するための管理装置である。当該管理装置は、前記操作者が前記ロボットを操作した際の前記ロボットの状態又は前記操作者の状態を示す状態情報を取得する情報取得部と、前記状態情報が示す前記ロボットの状態又は前記操作者の状態を予め定められた基準レベルと比較することにより、前記操作者が前記ロボットを操作することに対する適性度を決定する決定部と、前記操作者を識別するための操作者識別情報に関連付けて前記適性度を記憶部に記憶させる記憶制御部と、を有する。 The management device according to the first aspect of the present invention is a management device for managing an operator who operates a robot. The management device includes an information acquisition unit that acquires state information indicating the state of the robot or the state of the operator when the operator operates the robot, and the state or operation of the robot indicated by the state information. By comparing the state of the person with a predetermined reference level, the determination unit that determines the suitability for the operator to operate the robot is associated with the operator identification information for identifying the operator. It also has a storage control unit that stores the appropriateness in the storage unit.
前記情報取得部は、前記操作者が前記ロボットを複数回にわたって操作した際の前記ロボットの複数の状態又は前記操作者の複数の状態を示す前記状態情報を取得し、前記決定部は、前記状態情報が示す前記ロボットの複数の状態又は前記操作者の複数の状態に基づいて前記適性度を決定してもよい。 The information acquisition unit acquires the state information indicating a plurality of states of the robot or a plurality of states of the operator when the operator operates the robot a plurality of times, and the determination unit obtains the state information indicating the state. The suitability may be determined based on a plurality of states of the robot or a plurality of states of the operator indicated by the information.
前記決定部は、前記ロボットの状態又は前記操作者の状態が入力されたことに応じて前記適性度を示す情報を出力する機械学習モデルに、前記状態情報が示す前記ロボットの状態又は前記操作者の状態を入力し、前記機械学習モデルから出力される情報に基づいて前記適性度を決定してもよい。 The determination unit outputs the state of the robot or the state of the operator indicated by the state information to a machine learning model that outputs information indicating the suitability in response to the input of the state of the robot or the state of the operator. The aptitude may be determined based on the information output from the machine learning model by inputting the state of.
前記情報取得部は、前記操作者の状態として、前記操作者が前記ロボットを操作した後の前記操作者の気分を示す前記状態情報を取得し、前記決定部は、前記状態情報が示す前記操作者の気分に基づいて前記適性度を決定してもよい。 The information acquisition unit acquires the state information indicating the mood of the operator after the operator operates the robot as the state of the operator, and the determination unit obtains the operation indicated by the state information. The aptitude may be determined based on the mood of the person.
前記情報取得部は、所定の試験用シナリオを前記操作者に通知し、前記操作者が前記試験用シナリオに基づいて前記ロボットを操作した際の前記ロボットの状態又は前記操作者の状態を示す前記状態情報を取得してもよい。 The information acquisition unit notifies the operator of a predetermined test scenario, and indicates the state of the robot or the state of the operator when the operator operates the robot based on the test scenario. The status information may be acquired.
前記決定部は、前記操作者が操作する前記ロボットの周囲の状態が異常な状態である間の前記ロボットの状態又は前記操作者の状態を示す前記状態情報を用いず、前記ロボットの周囲の状態が正常な状態である間に行われた前記ロボットの状態又は前記操作者の状態を示す前記状態情報を用いて前記適性度を決定してもよい。 The determination unit does not use the state information indicating the state of the robot or the state of the operator while the state of the surroundings of the robot operated by the operator is an abnormal state, and the state around the robot is not used. The suitability may be determined using the state information indicating the state of the robot or the state of the operator performed while the robot is in a normal state.
前記記憶制御部は、それぞれ異なる複数の前記ロボットを識別するロボット識別情報に関連付けて前記適性度を前記記憶部に記憶させてもよい。 The storage control unit may store the suitability in the storage unit in association with robot identification information that identifies a plurality of different robots.
前記決定部は、前記操作者識別情報に関連付けて前記記憶部に記憶された前記適性度と前記ロボット識別情報とに基づいて、前記複数のロボットから前記操作者に操作を許可する一以上の前記ロボットを選択してもよい。 The determination unit is one or more of the above-mentioned ones that permit the operator to operate from the plurality of robots based on the aptitude and the robot identification information stored in the storage unit in association with the operator identification information. You may choose a robot.
前記決定部は、前記操作者識別情報に関連付けて前記記憶部に記憶された前記適性度に基づいて、前記ロボットを操作する際に用いられる複数のシナリオから一以上のシナリオを選択してもよい。 The determination unit may select one or more scenarios from a plurality of scenarios used when operating the robot based on the suitability stored in the storage unit in association with the operator identification information. ..
前記決定部は、前記操作者識別情報に関連付けて前記記憶部に記憶された前記適性度に基づいて、前記ロボットを操作する際に用いられる複数の操作装置から一以上の操作装置を選択してもよい。 The determination unit selects one or more operation devices from a plurality of operation devices used when operating the robot based on the appropriateness stored in the storage unit in association with the operator identification information. May be good.
前記決定部は、前記操作者が前記ロボットを操作する際に前記ロボットが実行可能な動作を前記適性度に基づいて決定し、前記操作者が操作をする前記ロボットに対して、決定した動作の内容を示すデータを送信してもよい。 The determination unit determines an operation that can be executed by the robot when the operator operates the robot based on the appropriateness, and determines the operation with respect to the robot operated by the operator. Data indicating the contents may be transmitted.
前記決定部は、前記適性度に基づいて、前記操作者が前記ロボットを操作する際に前記操作者に通知する補助コンテンツを選択し、選択した補助コンテンツを示すデータを前記操作者に通知してもよい。 Based on the aptitude, the determination unit selects auxiliary content to be notified to the operator when the operator operates the robot, and notifies the operator of data indicating the selected auxiliary content. May be good.
前記決定部は、前記操作者の前記適性度よりも高い適性度を有する他の操作者が前記ロボットを操作する際の操作内容を示すコンテンツを前記補助コンテンツとして選択してもよい。前記決定部は、前記適性度が示す前記操作者の遠隔操作に対する耐性に基づいて前記補助コンテンツの提示態様を決定してもよい。 The determination unit may select content indicating the operation content when another operator having an aptitude higher than the aptitude of the operator operates the robot as the auxiliary content. The determination unit may determine the mode of presenting the auxiliary content based on the resistance of the operator to remote control indicated by the suitability.
前記決定部は、前記適性度に基づいて、前記操作者が前記ロボットを操作することを許容する、前記ロボットの操作性に影響を与える環境条件を決定してもよい。 Based on the aptitude, the determination unit may determine environmental conditions that affect the operability of the robot, which allows the operator to operate the robot.
前記情報取得部は、前記操作者が前記ロボットを操作することにより実行する業務の内容を示す業務情報をさらに取得し、前記決定部は、前記業務情報が示す前記業務の内容と前記適性度とに基づいて、前記操作者に対する報酬額を決定してもよい。 The information acquisition unit further acquires business information indicating the content of the business executed by the operator by operating the robot, and the determination unit has the content of the business indicated by the business information and the appropriateness. The reward amount for the operator may be determined based on the above.
前記情報取得部は、前記操作者が前記ロボットを操作することにより実行する業務の内容を示す業務情報をさらに取得し、前記決定部は、複数の前記操作者に対応する複数の前記適性度に基づいて、前記複数の操作者から、前記業務情報が示す内容の業務を遂行させる一以上の操作者を選択してもよい。 The information acquisition unit further acquires business information indicating the content of the business executed by the operator by operating the robot, and the determination unit has a plurality of aptitudes corresponding to the plurality of the operators. Based on this, one or more operators who perform the work of the contents indicated by the work information may be selected from the plurality of operators.
前記決定部は、前記記憶部に記憶された前記複数の適性度を参照することにより、前記一以上の操作者それぞれが前記ロボットの操作を実行する順序又は時間を決定してもよい。 The determination unit may determine the order or time for each of the one or more operators to execute the operation of the robot by referring to the plurality of aptitudes stored in the storage unit.
前記管理装置は、前記操作者の操作内容を取得し、前記適性度に基づいて前記操作内容を補正することにより、前記ロボットを動作させるための指示情報を作成し、作成した前記指示情報を前記ロボットに送信する指示送信部をさらに有してもよい。 The management device acquires the operation content of the operator, corrects the operation content based on the aptitude, creates instruction information for operating the robot, and uses the created instruction information as the instruction information. It may further have an instruction transmitting unit for transmitting to the robot.
前記決定部が決定した前記操作者の前記適性度に関連付けて前記操作者が前記ロボットを操作しているか否かを示す情報を情報端末に表示させる表示制御部をさらに有してもよい。 The information terminal may further have a display control unit that displays information indicating whether or not the operator is operating the robot in association with the aptitude of the operator determined by the determination unit.
本発明の第2の態様の管理方法は、コンピュータが実行する、ロボットを操作する操作者を管理するための管理方法であって、前記操作者が前記ロボットを操作した際の前記ロボットの状態又は前記操作者の状態を示す状態情報を取得するステップと、前記状態情報が示す前記ロボットの状態又は前記操作者の状態を予め定められた基準レベルと比較することにより、前記操作者が前記ロボットを操作することに対する適性度を決定するステップと、前記操作者を識別するための操作者識別情報に関連付けて前記適性度を記憶部に記憶させるステップと、を有する。 The management method according to the second aspect of the present invention is a management method executed by a computer for managing an operator who operates a robot, and is a state of the robot or a state of the robot when the operator operates the robot. By comparing the step of acquiring the state information indicating the state of the operator with the state of the robot indicated by the state information or the state of the operator with a predetermined reference level, the operator controls the robot. It has a step of determining the suitability for the operation and a step of storing the suitability in the storage unit in association with the operator identification information for identifying the operator.
本発明の第2の態様の管理システムは、ロボットと、前記ロボットを操作するために操作者が使用する操作装置と、前記操作者を管理するための管理装置と、を備える。前記操作装置は、前記操作者が操作した内容を示す指示情報を前記ロボットに送信する指示送信部と、前記操作者が操作をした際の前記操作者の状態を示す操作者状態情報を前記管理装置に送信する操作者状態送信部と、を有する。 The management system of the second aspect of the present invention includes a robot, an operation device used by an operator to operate the robot, and a management device for managing the operator. The operating device manages an instruction transmitting unit that transmits instruction information indicating the contents operated by the operator to the robot, and an operator state information indicating the state of the operator when the operator operates. It has an operator status transmitter for transmitting to the device.
前記ロボットは、前記指示情報を受信する指示受信部と、前記指示情報に基づいて機構を制御する機構制御部と、前記機構制御部が前記機構を制御した後の前記ロボットの状態を示すロボット状態情報を前記管理装置に送信するロボット状態送信部と、を有する。 The robot has an instruction receiving unit that receives the instruction information, a mechanism control unit that controls the mechanism based on the instruction information, and a robot state that indicates the state of the robot after the mechanism control unit controls the mechanism. It has a robot state transmission unit that transmits information to the management device.
前記管理装置は、前記操作者が前記ロボットを操作した際の前記ロボットの状態を示す前記ロボット状態情報又は前記操作者状態情報を取得する情報取得部と、前記ロボット状態情報が示す前記ロボットの状態又は前記操作者状態情報が示す前記操作者の状態を予め定められた基準レベルと比較することにより、前記操作者が前記ロボットを操作することに対する適性度を決定する決定部と、前記操作者を識別するための操作者識別情報に関連付けて前記適性度を記憶部に記憶させる記憶制御部と、を有する。 The management device includes an information acquisition unit that acquires the robot state information or the operator state information indicating the state of the robot when the operator operates the robot, and the state of the robot indicated by the robot state information. Alternatively, a determination unit that determines the suitability for the operator to operate the robot by comparing the state of the operator indicated by the operator state information with a predetermined reference level, and the operator. It has a storage control unit that stores the appropriateness in the storage unit in association with the operator identification information for identification.
本発明によれば、ロボットの操作者の適性度の推定精度を向上させることが可能になるという効果を奏する。 According to the present invention, it is possible to improve the estimation accuracy of the suitability of the robot operator.
[管理システムSの概要]
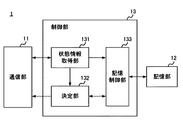
図1は、管理システムSの概要を示す図である。管理システムSは、管理装置1と、ロボット2と、操作装置3とを有する。管理システムSは、ロボット2を操作する操作者Uに、遠隔地にある物又は人が近くに存在するかのように感じさせながら、遠隔地にある物又は人の近くにあるロボットの操作を操作者Uがリアルタイムに行うテレイグジスタンス環境を提供するシステムである。図1においては、1人の操作者U、1台の操作装置3、及び1台のロボット2を示しているが、管理システムSは、複数の操作者U、複数の操作装置3及び複数のロボット2を管理することが想定されている。
[Overview of management system S]
FIG. 1 is a diagram showing an outline of the management system S. The management system S includes a
管理装置1は、ロボット2を操作する操作者Uを管理するためのサーバである。管理装置1は、操作者Uがロボット2を操作することに対する適性度を決定し、操作者Uに関連付けて適性度を記憶している。管理システムSを利用する事業者は、管理装置1が管理している操作者Uの適性度を利用して、操作者が安全にロボット2を操作できるようにしたり、ロボット2を操作する複数の業務のうち、操作者Uに適した業務を操作者に依頼したりすることができる。適性度は、操作者Uがロボット2を操作することに対する適性の度合いである。適性度の詳細については後述する。
The
ロボット2は、ネットワークNを介して操作装置3から受信した指示情報に基づいて動作する装置である。ネットワークNは、例えばインターネット及び携帯電話網を含む。図1に示す例では、ロボット2は人間と同様の頭部、腕部及び脚部等を有しており、ロボット2を操作する操作者Uの体の動きに追従して各部が動作する。ロボット2は、撮像素子、マイクロホン又は各種のセンサーを装備しており、撮像素子が生成した撮像画像、マイクロホンが収集した音情報、又はセンサーが検出した温度、振動及び圧力等の知覚情報を操作装置3に送信する。
The
操作装置3は、操作者Uがロボット2を制御するためのデバイスである。操作装置3は、例えば、操作者Uが装着する操作用具と、操作者Uの操作用具の状態をロボット2に通知する通信ユニットを含むコックピットとを有する。操作装置3は、操作用具を装着した状態の操作者Uの動作を特定し、特定した動作を示す指示情報をロボット2に送信する。操作装置3においては、例えば、操作者Uが装着した操作用具が有するセンサーから受信した信号に基づいて、コックピットが操作者Uの動作を特定する。コックピットは、赤外光を操作者Uに照射し、照射した赤外光の反射光に基づいて操作者Uの動作を特定してもよい。コックピットは、カメラで操作者Uを撮影した画像を解析することにより操作者Uの動作を特定してもよい。
The
また、操作装置3は、ネットワークNを介してロボット2から受信した撮像画像及び知覚情報を操作者Uが装着している操作用具に通知してもよい。撮像画像は、操作者Uが装着する操作用具に含まれるゴーグルのディスプレイ、又は操作者Uが目に装着するコンタクトレンズなどに表示される。操作者Uが手、足、及び腕等に装着する操作用具は、知覚情報に基づいて温度を変化させたり振動したりする。これらの構成により、操作者Uは、ロボット2から離れた場所において、あたかもロボット2に入っているかのような感覚でロボット2の周辺の環境を体感することができる。
Further, the operating
適性度は、例えば、操作者Uがロボット2を操作する間又はロボット2を操作した後のロボットの状態を示すロボット状態情報、及び操作者Uの状態を示す操作者状態情報の少なくともいずれかに基づいて決定された、操作者Uがロボット2を操作するスキルのレベル、又は遠隔操作に対する耐性(以下、「遠隔操作耐性」という。)のレベルである。例えば、遠隔操作をしたことにより身体が影響を受けにくい度合である。遠隔操作により気分が悪くなりやすい、目の焦点がずれやすい、視界が不明瞭になりやすい、心拍数が増加しやすい、血圧が上がりやすい、呼吸が乱れやすい、又は発汗しやすいほど、遠隔操作耐性のレベルが低い。目の焦点、心拍数、血圧、呼吸数、及び発汗量等は、操作者Uの気分を示す状態情報の一例と考えられるが、気分を示す状態情報はこれらには限られない。
The suitability is, for example, at least one of robot state information indicating the state of the robot while the operator U operates the
ロボット状態情報は、例えば、ロボット2の各部の位置、ロボット2の各部の移動速度、ロボット2の各部の移動方向、ロボット2が出している力(トルク)、ロボット2の各部の加速度又はロボット2の各部に設けられたセンサーが検出した状態等を示す情報である。
The robot state information includes, for example, the position of each part of the
操作者状態情報は、操作装置3が検出した操作者Uの各部の位置、操作者Uの各部の移動速度、操作者Uの各部の移動方向、又は操作者Uの身体状態を示す情報である。操作者Uの身体状態は、例えば操作者Uの眼球の動き、発汗の状態、呼吸の状態、心拍の状態又は操作者Uの振動状態であり、操作者Uの気分と相関性を有している。操作者Uがロボット2を操作している間にロボット2から送信される動画を視認することで気分が悪くなった場合、眼球の位置が不安定になったり、発汗量が増えたり、心拍数が増えたりする。したがって、操作者状態情報と遠隔操作耐性のレベルとは相関性を有している。
The operator state information is information indicating the position of each part of the operator U detected by the
なお、操作者状態情報は、操作者が操作装置3を用いて入力した情報であってもよい。例えば、操作装置3は、操作者Uの気分を確認するための画面を定期的に表示させ、操作者Uにより入力された気分を示す情報を、操作者状態情報として取得してもよい。
The operator status information may be information input by the operator using the
適性度は、単位時間内に実行可能にされた作業量、操作の精度、誤操作の履歴、操作経験年数等にさらに基づいて決定されてもよい。適性度は、適性度を決定する要因のカテゴリーごとに数値化された情報であってもよく、全てのカテゴリーの要因に基づいて決定された、操作者Uの総合的な適性を示す情報であってもよい。適性度は、年齢・性別のように、ロボットの操作能力と相関する平均的な人の特徴であってもよい。 The aptitude may be further determined based on the amount of work enabled within a unit time, the accuracy of the operation, the history of erroneous operations, the number of years of operation experience, and the like. The aptitude may be information quantified for each category of factors that determine the aptitude, and is information indicating the overall aptitude of the operator U determined based on the factors of all categories. You may. The aptitude may be a characteristic of an average person that correlates with the operating ability of the robot, such as age and gender.
以下、図1を参照しながら管理システムSの動作の概要を説明する。
操作者Uは、操作装置3を装着した状態で身体を動かす。操作装置3は、操作者Uの身体の動きを検出し、検出した動きの内容を示す指示情報をロボット2に送信する(図1における(1))。ロボット2は、指示情報を受信すると、指示情報が示す動きの内容に基づいて動作する(図1における(2))。
Hereinafter, an outline of the operation of the management system S will be described with reference to FIG.
The operator U moves his / her body while wearing the
操作者Uが操作装置3を用いてロボット2を動作させている間、ロボット2は、ロボット2の各種の状態を示すロボット状態情報を管理装置1に送信する(図1における(3))。また、操作装置3は、操作者Uの状態を示す操作者状態情報を管理装置1に送信する(図1における(4))。
While the operator U is operating the
管理装置1は、ロボット2から受信したロボット状態情報、及び操作装置3から受信した操作者状態情報に基づいて、操作者Uがロボット2を操作することに対する適性度を決定する。詳細については後述するが、管理装置1は、例えば、ロボット状態情報が、ロボット2の操作経験が豊富な人がロボット2を操作した場合のロボット2の動きと類似しているロボットの動きを示している場合に操作者Uの適性度を高くする。また、管理装置1は、例えば、操作者状態情報が、操作者Uの気分が悪くなっていることを示している場合に操作者Uの適性度を低くする。
以下、管理装置1の構成及び動作を詳細に説明する。
The
Hereinafter, the configuration and operation of the
[管理装置1の機能構成]
図2は、管理装置1の機能構成を示す図である。管理装置1は、通信部11と、記憶部12と、制御部13とを有する。制御部13は、情報取得部131と、決定部132と、記憶制御部133とを有する。
[Functional configuration of management device 1]
FIG. 2 is a diagram showing a functional configuration of the
通信部11は、ネットワークNを介してデータを送受信するための通信インターフェースであり、例えばLAN(Local Area Network)コントローラを含む。通信部11は、ロボット2から受信したロボット状態情報、及び操作装置3から受信した操作者状態情報を情報取得部131に入力する。
The
記憶部12は、ROM(Read Only Memory)、RAM(Random Access Memory)及びハードディスク等の記憶媒体を含む。記憶部12は、制御部13が実行するプログラムを記憶する。また、記憶部12は、複数の操作者Uに関連付けて、操作者Uの適性度を記憶する。記憶部12は、ロボット2の種別に関連付けて操作者Uの適性度を記憶してもよい。また、記憶部12は、ロボット2を用いた業務の内容に関連付けて操作者Uの適性度を記憶してもよい。
The
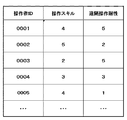
図3は、記憶部12が記憶する操作者データベースの一例を示す図である。図3に示す操作者データベースにおいては、操作者を識別するための操作者識別情報(以下、操作者IDという。)と、操作者の操作スキルと、操作者の遠隔操作耐性とが関連付けられている。
FIG. 3 is a diagram showing an example of an operator database stored by the
図3に示す操作者データベースにおける数値は、操作スキル及び遠隔操作耐性を5つのレベルに分類した場合の各操作者のレベルを示している。操作スキル欄の「5」は操作スキルが最も高いレベルであることを示しており、操作スキル欄の「1」は操作スキルが最も低いレベルであることを示している。遠隔操作耐性欄の「5」は耐性が最も高いレベルであることを示しており、遠隔操作耐性欄の「1」は耐性が最も低いレベルであることを示している。操作者データベースは、操作スキル及び遠隔操作耐性の両方に基づいた総合的な適性度を示す評価値を含んでもよい。 The numerical values in the operator database shown in FIG. 3 indicate the level of each operator when the operation skill and the remote control tolerance are classified into five levels. "5" in the operation skill column indicates that the operation skill is at the highest level, and "1" in the operation skill column indicates that the operation skill is at the lowest level. A "5" in the remote control resistance column indicates the highest level of resistance, and a "1" in the remote control resistance column indicates the lowest level of resistance. The operator database may include evaluation values indicating overall aptitude based on both operational skills and remote control tolerance.
制御部13は、例えばCPU(Central Processing Unit)を有する。制御部13は、記憶部12に記憶されたプログラムを実行することにより、情報取得部131、決定部132及び記憶制御部133として機能する。
The
情報取得部131は、操作者Uがロボット2を操作した際のロボット2の状態又は操作者Uの状態を示す状態情報を取得する。具体的には、情報取得部131は、通信部11を介して、ロボット2から送信されたロボット状態情報、及び操作装置3から送信された操作者状態情報の少なくともいずれかを取得する。情報取得部131は、例えば、操作者Uがロボット2を操作した後の操作者Uの気分を示す状態情報を操作者状態情報として取得する。
The
情報取得部131は、取得したロボット状態情報及び操作者状態情報を決定部132に通知する。情報取得部131は、取得したロボット状態情報及び操作者状態情報を、記憶制御部133を介して、ロボット2を操作している操作者Uを識別するための操作者IDに関連付けて記憶部12に記憶させてもよい。
The
情報取得部131は、操作者Uがロボット2を複数回にわたって操作した際のロボット2の複数の状態又は操作者Uの複数の状態を示す状態情報を取得してもよい。この場合、情報取得部131は、ロボット状態情報又は操作者状態情報を取得した日時に関連付けて、ロボット状態情報又は操作者状態情報を記憶部12に記憶させる。
The
決定部132は、状態情報が示すロボット2の状態又は操作者Uの状態を予め定められた基準レベルと比較することにより、操作者Uがロボット2を操作することに対する適性度を決定する。基準レベルは、予め適性度が決定された多数の基準操作者がロボット2を操作している間のロボット2の状態又は基準操作者の状態を示す各種の数値である。適性度が図3に示したように5つのレベルに分類されている場合、各レベルに対応する操作スキルの基準レベルは、各レベルに対応する基準操作者がロボット2を操作している間に特定されたロボット2の各部の位置、ロボット2の各部の移動速度、ロボット2の各部の移動方向、又はロボット2の各部に設けられたセンサーが検出した値である。また、各レベルに対応する遠隔操作耐性の基準レベルは、各レベルに対応する基準操作者がロボット2を操作している間に特定された遠隔操作耐性を示す値である。
The
決定部132は、情報取得部131が取得したロボット状態情報が示すロボット2の状態が最も近い、操作スキルの基準レベルを特定することにより、適性度を決定する。決定部132は、情報取得部131が取得した操作者状態情報が示す操作者Uの状態に最も近い、遠隔操作耐性の基準レベルを特定することにより、操作者状態情報が示す操作者Uの気分に基づいて適性度を決定する。
The
決定部132は、情報取得部131が、操作者Uがロボット2を複数回にわたって操作した際のロボット2の複数の状態又は操作者Uの複数の状態を示す状態情報を取得した場合、ロボット2の複数の状態又は操作者Uの複数の状態に基づいて適性度を決定する。決定部132は、複数の状態情報に関連付けられて記憶部12に記憶された日時に基づいて、複数の状態に重みづけすることにより適性度を決定してもよい。決定部132は、例えば、適性度を決定する時点に近い日時に取得されたロボット状態情報又は操作者状態情報の重みを、適性度を決定する時点から遠い日時に取得されたロボット状態情報又は操作者状態情報の重みよりも大きくすることにより、適性度を決定する。決定部132がこのように動作することで、操作者Uのスキルの向上、又は身体状態の変化を考慮して適性度を決定することができる。
When the
また、ロボット2及び操作装置3の種類による使いやすさの違い、ロボット2及び操作装置3の機体による使いやすさの違い、又はネットワークNの状況による通信遅延時間の大きさ等によって、ロボット2の操作のしやすさが変化する。そこで、決定部132は、ロボット2の種類、操作装置3の種類、ロボット2の機体識別情報、操作装置3の機体識別情報、又はネットワークNの状況のいずれかに基づいて複数の状態に重み付けすることにより適性度を決定してもよい。
Further, depending on the difference in ease of use depending on the type of the
決定部132は、ロボット2の状態又は操作者Uの状態が入力されたことに応じて適性度を示す情報を出力する機械学習モデルに、状態情報が示すロボット2の状態又は操作者Uの状態を入力し、機械学習モデルから出力される情報に基づいて適性度を決定してもよい。この機械学習モデルは、予め適性度が決定された多数の基準操作者がロボット2を操作している間に取得されたロボット2の状態又は基準操作者の状態を示す各種の数値を教師データとして学習することにより作成されたモデルである。
The
上記の機械学習モデルは、適性度の複数のレベルごとに、各レベルに対応する多数の基準操作者がロボット2を操作している間に取得されたロボット2の状態又は基準操作者の状態を示す各種の数値を教師データとして学習することにより作成されたモデルである。決定部132が、情報取得部131が取得したロボット状態情報又は操作者状態情報をこのような機械学習モデルに入力することにより、操作者の適性度がどのレベルであるかを容易に決定することができる。
The above machine learning model determines the state of the
決定部132は、ロボット2の状態が入力されたことに応じて操作スキルを示す情報を出力する第1機械学習モデルと、操作者Uの状態が入力されたことに応じて遠隔操作耐性を示す情報を出力する第2機械学習モデルとに基づいて、適性度を決定してもよい。決定部132がこのような第1機械学習モデル及び第2機械学習モデルを使用することにより、ロボット状態情報に基づいて操作スキルを特定する精度、及び操作者状態情報に基づいて遠隔操作耐性を特定する精度を向上させることができる。
The
記憶制御部133は、操作者IDに関連付けて、情報取得部131が取得したロボット状態情報及び操作者状態情報を記憶部12に記憶させる。また、記憶制御部133は、操作者IDに関連付けて、決定部132が決定した適性度を記憶部12に記憶させる。
The
[ロボット2の機能構成]
図4は、ロボット2の機能構成を示す図である。ロボット2は、通信部21と、機構部22と、センサー部23と、記憶部24と、制御部25とを有する。制御部25は、指示受信部251と、機構制御部252と、ロボット状態送信部253とを有する。
[Functional configuration of robot 2]
FIG. 4 is a diagram showing a functional configuration of the
通信部21は、ネットワークNを介してデータを送受信するための通信インターフェースであり、例えば無線通信コントローラを含む。通信部21は、ネットワークNを介して、操作装置3から送信された指示情報を受信する。また、通信部21は、ネットワークNを介して、ロボット2の状態を示すロボット状態情報を管理装置1に送信する。
The
機構部22は、ロボット2の各部のアクチュエータを含む。機構部22は、例えば、指、手、足、首、頭等の各部の関節に設けられたアクチュエータのように、制御部25の制御により動く機構部材を含む。
The
センサー部23は、ロボット2の各部に設けられており、各種の状態を検知するためのデバイスを含む。センサー部23は、例えばロボット2の目に設けられたカメラ、ロボット2の側頭部等に設けられたマイクロホン、又はロボット2の指に設けられた温度センサー及び圧力センサーである。センサー部23は、各センサーが検出した状態を示す信号をロボット状態送信部253に通知する。
The
記憶部24は、ROM、RAM及びハードディスク等の記憶媒体を含む。記憶部24は、制御部25が実行するプログラムを記憶する。
The
制御部25は、例えばCPUを有しており、記憶部24に記憶されたプログラムを実行することにより、指示受信部251、機構制御部252及びロボット状態送信部253として機能する。
The
指示受信部251は、操作装置3から送信された指示情報を、通信部21を介して受信する。指示受信部251は、受信した指示情報を機構制御部252に通知する。
The
機構制御部252は、指示受信部251から通知された指示情報に基づいて機構部22に含まれる各アクチュエータを制御する。機構制御部252は、例えば手を右に動かすという指示を含む指示情報を取得すると、手に設けられたアクチュエータを制御することにより、ロボット2の手を右に動かす。機構制御部252は、機構部22を動かした後の各アクチュエータの位置を検出し、検出した位置をロボット状態送信部253に通知してもよい。
The
ロボット状態送信部253は、センサー部23が検出した信号、及び機構制御部252から通知された機構部22の状態に基づいて、ロボット2の状態を示すロボット状態情報を生成する。ロボット状態送信部253は、生成したロボット状態情報を、通信部21を介して管理装置1に送信する。
The robot
[操作装置3の機能構成]
図5は、操作装置3の機能構成を示す図である。操作装置3は、操作部31と、検出部32と、通信部33と、表示部34と、記憶部35と、制御部36を有する。制御部36は、状態特定部361と、指示送信部362と、状態送信部363と、表示制御部364とを有する。
[Functional configuration of operating device 3]
FIG. 5 is a diagram showing a functional configuration of the
操作部31は、操作者Uがロボット2を操作するためのデバイスであり、例えば、操作者Uが装着する部材、及び操作者Uが操作するボタン又はジョイスティックを含む。操作部31は、検出した操作者Uが行った操作内容を状態特定部361に通知する。
The
検出部32は、操作者Uの状態を検出するためのセンサーを含む。検出部32は、例えば操作者Uの瞳孔の位置を検出するカメラ、操作者Uの発汗状態を検出する湿度センサー、操作者Uの心拍数を検出する脈拍センサー、操作者Uの血圧を検出する血圧センサー、操作者Uの呼吸数若しくは呼気成分を検出する呼吸センサー、又は操作者Uの各部の動きを検出する加速度センサーを含む。検出部32は、検出した操作者Uの状態を状態特定部361に通知する。
The
通信部33は、ネットワークNを介してデータを送受信するための通信インターフェースであり、例えば無線通信コントローラを含む。通信部33は、ネットワークNを介して、操作部31により検出された操作者Uの操作内容に基づいて制御部36が生成したロボット2に対する指示情報をロボット2に送信する。また、通信部33は、ネットワークNを介して、操作者Uの状態を示す操作者状態情報を管理装置1に送信する。
The
表示部34は、操作者Uに視認させる情報を表示するディスプレイである。表示部34は、例えば、操作者Uが装着するゴーグルに設けられている。
The
記憶部35は、ROM、RAM及びハードディスク等の記憶媒体を含む。記憶部35は、制御部36が実行するプログラムを記憶する。
The
制御部36は、例えばCPUを有しており、記憶部35に記憶されたプログラムを実行することにより、状態特定部361、指示送信部362、状態送信部363及び表示制御部364として機能する。
The
状態特定部361は、操作部31から入力された操作内容を示す信号に基づいて操作者Uが行った操作内容を特定し、検出部32から入力された操作者Uの状態を示す信号に基づいて操作者Uの状態を特定する。状態特定部361は、操作部31から入力された信号、及び検出部32から入力された信号の両方に基づいて操作者Uの状態を特定してもよい。状態特定部361は、特定した操作内容を指示送信部362に通知し、操作者Uの状態を状態送信部363に通知する。
The
指示送信部362は、状態特定部361から通知された操作内容に基づいて、ロボット2を動作させるための指示情報を生成する。指示送信部362は、生成した指示情報を、通信部33を介してロボット2に送信する。
The
状態送信部363は、状態特定部361から通知された操作者Uの状態に基づいて、操作者Uの状態を示す操作者状態情報を生成する。状態送信部363は、生成したロボット状態情報を、通信部33を介して管理装置1に送信する。
The
表示制御部364は、表示部34に表示させる表示用データを作成する。表示制御部364は、例えばロボット2から送信された、ロボット2において撮影された画像を表示部34に表示させる。また、表示制御部364は、管理装置1から送信された、操作者Uに視認させるための情報を表示部34に表示させる。
The
[適性度を決定するための各種の方法]
以下、管理装置1が操作者Uの適性度を決定するための各種の方法を説明する。
情報取得部131は、例えば、所定の試験用シナリオを操作者Uに通知し、操作者Uが試験用シナリオに基づいてロボット2を操作した際のロボット2の状態又は操作者Uの状態を示す状態情報を取得する。試験用シナリオは、操作者Uが操作する内容及び操作するタイミングを規定した情報である。
[Various methods for determining suitability]
Hereinafter, various methods for the
For example, the
情報取得部131は、例えば操作装置3に対して試験用シナリオを送信し、操作装置3は、受信した試験用シナリオが示す操作の内容及び操作するタイミングに基づいて、操作者Uが操作するべき内容を操作者Uが視認できるように表示する。情報取得部131が、適性度を決定するために必要な操作内容を含む試験用シナリオに基づいて操作者Uが操作している間のロボット2の状態を示すロボット状態情報又は操作者Uの状態を示す操作者状態情報を取得することにより、決定部132が効率よく適性度を決定することができる。
The
なお、決定部132が試験用シナリオに基づいて操作者Uの適性度を決定する際に、操作者Uが実際にロボット2を操作した時のロボット状態情報又は操作者状態情報を使用する代わりに、操作者Uが仮想的なロボットを操作したと仮定することにより推定される仮想的なロボットの動きに基づいて特定されるロボット状態情報又は操作者状態情報を使用してもよい。例えば、決定部132は、ロボット2を操作するシミュレーション環境を用いて操作者Uがシミュレーション環境上で仮想的なロボットを操作した際に得られるロボット状態情報又は操作者状態情報に基づいて適性度を決定してもよい。
When the
また、ロボット2の周囲の状態が異常な状態である場合、ロボット2が操作者Uの意図に反した動きをする場合がある。例えば、ロボット2が動く範囲内に人が入ってきた場合、ロボット2は人に衝突しないように停止する。また、ロボット2が掴もうとした物品に異常がある場合、又は作業内容が操作者Uに適切に提示されない場合に、ロボット2が適切に物品を掴めない場合もある。ロボット2がこのような動きをしたことによって操作者Uの適性度が低くならないように、決定部132は、ロボット2の周囲の状態に基づいて適性度を決定してもよい。
Further, when the surrounding state of the
具体的には、決定部132は、操作者Uが操作するロボット2の周囲の状態が異常な状態である間のロボット2の状態又は操作者Uの状態を示す状態情報を用いず、ロボット2の周囲の状態が正常な状態である間に行われたロボット2の状態又は操作者Uの状態を示す状態情報を用いて適性度を決定する。決定部132がこのように動作することで、ロボット2が操作者Uの操作に反した動作をした場合に操作者Uの適性度が低くならないので、決定部132が決定する適性度の精度が向上する。
Specifically, the
また、操作者Uが操作する対象となるロボット2が複数存在する場合、情報取得部131は、操作者Uが操作するロボット2を識別するロボット識別情報(以下、「ロボットID」という。)に関連付けてロボット状態情報又は操作者状態情報を取得し、決定部132は、各ロボット2に対する操作者Uの適性度を決定してもよい。この場合、記憶制御部133は、それぞれ異なる複数のロボット2のロボットIDに関連付けて、適性度を記憶部12に記憶させる。
Further, when there are a plurality of
このように、ロボットIDに関連付けて操作者Uの適性度が記憶部12に記憶されることにより、種類が異なるロボット2が複数存在する場合に、操作者Uが、最適なロボット2を使用することが可能になる。例えば、操作者Uがロボット2を用いて行う作業を管理する管理者は、このようにして決定された適性度に基づいて、操作者Uが安全に操作をすることができるロボット2を割り当てることができる。決定部132は、予め登録された複数のロボット2のうち、操作者Uの適性度が所定のレベル以上のロボット2を選択してユーザに提示してもよい。決定部132がこのように動作することで、管理者が操作者Uに適したロボット2を容易に選択することができる。
In this way, the suitability of the operator U is stored in the
決定部132は、操作者Uが行う作業の種別に関連付けて適性度を決定してもよい。作業の種別は、例えば、物を運搬する作業、物を組み立てる作業、及び人を介護する作業等のように、ロボット2を動かす際に求められる力の大きさ及び動きの精度等の要素に基づいて分類されている。決定部132は、特定の作業を行っている間に情報取得部131が取得したロボット状態情報又は操作者状態情報に基づいて、当該作業に対応する適性度を決定する。決定部132は、記憶制御部133を介して、作業の種別に関連付けて適性度を記憶部12に記憶させる。決定部132がこのように作業の種別ごとに適性度を決定することで、操作者Uがロボット2を用いて行う作業を管理する管理者は、操作者Uに適した作業を割り当てることが可能になる。
The
決定部132は、操作者Uが作業を行う環境と作業に用いるロボット2との組合せに関連付けて適性度を決定してもよい。操作者Uが作業を行う環境は、例えば、明るさ、温度、湿度のように、作業効率に影響する要因により示される。決定部132は、例えば、ある操作者Uが明るい環境で作業する場合に第1のロボット2に対する適性度よりも、第2のロボット2に対する適性度を高くし、この操作者Uが暗い環境で作業をする場合に、第2のロボット2に対する適性度よりも、第1のロボット2に対する適性度を高くする。決定部132がこのように作業の種別ごとに適性度を決定することで、操作者Uが、動作環境に応じて最適なロボット2を使用することが可能になる。
The
[適性度を利用する機能]
(ロボット2の選択)
決定部132は、決定した適性度に基づいて、各種の処理を実行することができる。一例として、決定部132は、操作者IDに関連付けて記憶部12に記憶された適性度とロボットIDとに基づいて、複数のロボット2から操作者Uに操作を許可する一以上のロボット2を選択する。決定部132は、例えば、適性度が高い操作者Uが操作する場合、適性度が低い操作者Uが操作する場合に比べて大きなトルクを発生したり、高速に動作したりするロボット2を選択する。決定部132は、選択したロボット2を特定するための情報をディスプレイ(不図示)に表示させたり、ネットワークNを介して接続された外部装置に送信したりすることにより、操作者Uがロボット2を用いて行う作業を管理する管理者が、操作者Uに対して適切なロボット2を割り当てられるようにする。
[Function to use aptitude]
(Selection of robot 2)
The
(シナリオの選択)
また、決定部132は、操作者IDに関連付けて記憶部12に記憶された適性度に基づいて、ロボット2を操作する際に用いられる複数のシナリオから一以上のシナリオを選択してもよい。シナリオは、基準時刻からの経過時間とロボット2の動作内容とが関連付けられた情報である。基準時刻は、例えばロボット2が動作を開始した時刻であるが、これに限らず、ロボット2を操作するユーザが所定の操作をした時刻のような他の時刻であってもよい。
(Scenario selection)
Further, the
複数のシナリオは、例えば、それぞれに含まれるロボット2の動作内容、及びロボット2を動作させる時間の長さが異なる。決定部132は、操作スキルが低い操作者Uに対しては、高度なスキルが必要とされる動作内容を含まないシナリオ(例えば、他の物品にロボット2が衝突する可能性がないシナリオ)を選択する。決定部132は、操作スキルが高い操作者Uに対しては、高度なスキルが必要とされる動作内容を含むシナリオ(例えば、高速にロボット2が動作するシナリオ)を選択する。
The plurality of scenarios differ in, for example, the operation content of the
また、決定部132は、長時間にわたってロボット2を操作すると気分が悪くなってしまう操作者に対しては、ロボット2の操作が継続する時間が、操作者Uが気分が悪くなり始める操作時間よりも短いシナリオを選択する。決定部132は、事故を起こしやすい動きをする操作者Uに対しては、事故に対する許容度が大きい作業から構成されるシナリオを選択してもよい。決定部132がこのように動作することで、操作者Uがロボット2を操作する際に問題が生じることを未然に防ぐことができる。
Further, for the operator who feels sick when the
(操作装置3の選択)
また、決定部132は、操作者IDに関連付けて記憶部12に記憶された適性度に基づいて、ロボット2を操作する際に用いられる複数の操作装置3から一以上の操作装置3を選択してもよい。決定部132は、例えば、操作スキルが低い操作者Uに対しては、コストが高いけれども操作しやすい操作装置3を選択したり、動作内容に制限がありながらも操作しやすい操作装置3を選択したりする。決定部132は、気分が悪くなりやすい操作者Uに対しては、操作者Uが視認する画面における動画のフレームレートが低く、動画の変化速度が小さい操作装置3を選択したり、気分が悪くなりにくい大きさの画面の操作装置3を選択したりする。決定部132がこのように動作することで、操作者Uが最良の操作をすることができる。
(Selection of operating device 3)
Further, the
(ロボット2の動作の制限)
決定部132は、操作者Uがロボット2を操作する際にロボット2が実行可能な動作を適性度に基づいて決定し、操作者Uが操作をするロボット2に対して、決定した動作の内容を示すデータを送信してもよい。決定部132は、例えば、操作スキルが低い操作者Uがロボット2を操作する場合、ロボット2が手を動かすことができる最大速度を、操作スキルが高い操作者Uがロボット2を操作する場合に比べて低くしたり、ロボット2が手を動かす際のトルクを小さくしたりする。
(Restrictions on the operation of robot 2)
The
決定部132は、操作者Uの適性度に基づいてロボット2が動かせる部位を決定してもよい。決定部132は、例えばスキルが基準レベルよりも高い人はロボット2の全ての可動部位を動かせるようにし、スキルが基準レベルよりも低い人は一部の部位(例えば手)のみを動かせるようにする。決定部132がこのように動作することで、操作者Uが不適切な操作をした場合に事故が生じるリスクを低減することができる。
The
なお、決定部132は、操作者Uの適性度が予め特定されていない場合(例えば、操作者Uの適性度が記憶部12に記憶されていない場合)、ロボット2が実行可能な動作を、適性度が最も低い操作者Uが操作する際にロボット2が実行可能な動作に制限させてもよい。決定部132は、操作者Uの適性度が予め特定されていない場合であっても、過去にロボット2を使用した経験がある場合、ロボット2が実行可能な動作を、使用した経験に基づいて推定した適性度の操作者Uが操作する際にロボット2が実行可能な動作に制限させてもよい。
In addition, when the suitability of the operator U is not specified in advance (for example, when the suitability of the operator U is not stored in the storage unit 12), the
決定部132は、このようにロボット2が実行可能な動作を制限させる場合、操作者Uが実行可能な動作範囲を示す情報を操作装置3又は操作者Uの情報端末に表示させてもよい。決定部132は、操作者Uの適性度を示す情報に関連付けて、操作者Uが実行可能な動作範囲を示す情報を操作装置3又は操作者Uの情報端末に表示させてもよい。
When the
(適性度に応じた補助)
決定部132は、操作者Uの適性度に基づいて、操作者Uがロボット2を操作する際に操作者Uに通知する補助コンテンツを選択し、選択した補助コンテンツを示すデータを操作者Uに通知してもよい。補助コンテンツは、例えば、操作者Uの身体の各部の動かし方に関するテキスト又は画像のコンテンツである。補助コンテンツには、音情報又は触覚情報等の他の情報が含まれていてもよい。補助コンテンツは、記憶部12又は管理装置1の外部の記憶媒体に、適性度に関連付けて記憶されている。決定部132は、操作者Uが視認したり聞いたりすることができるように、補助コンテンツを操作装置3又は操作者Uが使用する情報端末に送信する。操作者Uは、例えば操作装置3に表示された補助コンテンツを視認しながら操作することで、より適切にロボット2を操作することができる。
(Assistance according to aptitude)
The
決定部132は、例えば、操作者Uの適性度よりも高い適性度を有する他の操作者Uがロボット2を操作する際の操作内容を示すコンテンツを補助コンテンツとして決定する。操作内容は、指、手、足、胴体、頭、又は目等の身体の少なくとも一部を動かす位置、及び動かすタイミングを示す情報を含む。決定部132は、例えば、操作者Uの適性度よりも1段階高いレベルの適性度を有する他の操作者Uが過去に同じ作業をした際に取得された操作内容を示す補助コンテンツを操作装置3に表示させる。決定部132は、他の操作者Uが操作している様子を示す画像を補助コンテンツとして操作装置3に表示させてもよい。
The
決定部132は、適性度に基づいて、補助コンテンツを操作者Uに通知する態様を変化させてもよい。決定部132は、例えば、操作スキルが低い操作者Uが操作している場合、常に操作者Uが視認できる態様で操作装置3に表示される補助コンテンツを選択する。一方、決定部132は、操作スキルが高い操作者Uが操作している場合、操作者Uが操作を間違ったり操作者Uが操作を止めたりした場合に限って操作者Uが視認できる態様で操作装置3に表示される補助コンテンツを選択する。
The
また、決定部132は、適性度が示す操作者Uの遠隔操作耐性に基づいて補助コンテンツの提示態様を決定してもよい。決定部132は、例えば、気分が悪くなりやすい操作者Uが操作している場合、気分が悪くなりにくい操作者Uが操作している場合に比べて、操作装置3に表示させる動画のフレームレートを低くして、補助コンテンツの動きを遅くする。
Further, the
決定部132は、適性度が示す操作者Uの遠隔操作耐性に基づいて、補助コンテンツ以外の画像の提示態様を決定してもよい。決定部132は、例えば、気分が悪くなりやすい操作者Uが操作している場合、気分が悪くなりにくい操作者Uが操作している場合に比べて、ロボット2において撮影された画像を操作装置3に表示させる際のフレームレートを低くしたり、画像のサイズを小さくしたりする。決定部132がこのように遠隔操作耐性に基づいて画像を操作者Uに視認させる態様を変えることで、操作者Uがロボット2を操作している間に気分が悪くなってしまうことを防止できる。
The
(適性度に基づく報酬額の決定)
決定部132は、適性度に基づいて、操作者Uに対する報酬額を決定してもよい。具体的には、情報取得部131が、操作者Uがロボット2を操作することにより実行する業務の内容を示す業務情報をさらに取得し、決定部132は、情報取得部131が取得した業務情報が示す業務の内容と適性度とに基づいて、操作者Uに対する報酬額を決定する。情報取得部131は、例えば、複数の業務情報を管理する外部のコンピュータから、操作者Uが実行する業務に対応する業務情報を取得する。
(Determination of remuneration amount based on aptitude)
The
決定部132は、記憶部12に記憶された複数の操作者Uの適性度の平均値又は中央値等の統計値と、報酬額を決定する対象となる操作者Uの適性度との関係に基づいて報酬額を決定してもよい。決定部132は、複数の操作者Uの適性度の統計値よりも報酬額を決定する対象となる操作者Uの適性度の値が大きい場合、操作者Uの報酬額を平均的な報酬額よりも高くする。一方、決定部132は、複数の操作者Uの適性度の統計値よりも報酬額を決定する対象となる操作者Uの適性度の値が小さい場合、平均的な報酬額よりも低くする。決定部132がこのようにして報酬額を決定することにより、適性度が高ければ高いほど報酬額が高くなるので、操作者Uが適性度を向上させるように動機付けられやすくなる。
The
決定部132は、適性度の各レベルに該当する操作者Uの数に基づいて報酬額を決定してもよい。決定部132は、操作者Uの適性度よりも高い適性度の操作者Uの数が少なければ少ないほど、操作者Uの報酬額を高くする。決定部132がこのようにして操作者Uの報酬額を決定することで、操作者Uが適性度を向上させようとするモチベーションが向上する。また、操作者Uが、自身の適性度が高いロボット2を用いたり、自身の適性度が高い作業を行ったりしようとする動機が与えられるので、操作者Uがロボット2を用いて作業をする際の作業効率及び安全性が向上する。
The
また、決定部132は、操作者Uが操作した際に操作装置3が取得した操作内容を示すデータを収集することに対する報酬額を決定してもよい。決定部132は、操作者Uが操作内容を示すデータを収集することに同意した場合に、データ使用料としての報酬額を決定する。この際、決定部132は、操作者Uの適性度が高いほど報酬額を高くしてもよい。
Further, the
また、決定部132は、収集したデータが使用される場合に操作者Uに与えられる報酬額を決定してもよい。この場合、決定部132は、例えば、収集したデータが使用される回数又は使用される時間の長さに基づいて報酬額を決定する。収集したデータは、例えば、他の操作者Uが操作する場合に他の操作者Uに提示される補助データとして使用される。
Further, the
(適性度に基づく操作者Uの選択)
決定部132は、適性度に基づいて、ロボット2を用いて業務を遂行する操作者Uを決定してもよい。具体的には、情報取得部131が、操作者Uがロボット2を操作することにより実行する業務の内容を示す業務情報をさらに取得し、決定部132は、複数の操作者Uに対応する複数の適性度に基づいて、複数の操作者Uから、業務情報が示す業務内容を遂行させる一以上の操作者を選択する。決定部132は、例えば、業務内容の困難度に対応する操作スキルを有する操作者Uを選択する。決定部132は、ロボット2を操作する業務の継続時間において気分が悪くならないと想定される操作者Uを選択してもよい。決定部132がこのように適性度に基づいて操作者Uを選択することで、業務の遂行に適した操作者Uを選択することができるので、業務の効率が向上する。
(Selection of operator U based on aptitude)
The
決定部132は、ロボット2の状況に基づいて、ロボット2を操作する操作者Uに求められる適性度を決定し、決定した適性度に基づいて、複数の操作者Uから、ロボット2を操作する操作者Uを選択してもよい。例えば、比較的低い適性度の第1の操作者Uがロボット2を用いることによる物品の製造中に問題が発生した場合に、決定部132は、第1の操作者Uよりも適性度が高い第2の操作者Uを選択し、選択した第2の操作者Uを特定するための情報を外部装置に送信する。決定部132がこのように動作することで、作業の管理者が、第1の操作者Uの代わりに第2の操作者Uに作業を実行させるようにすることができる。
The
決定部132は、ロボット2の所在に基づいて決定した適性度に基づいて、複数の操作者Uから、ロボット2を操作する操作者Uを選択してもよい。決定部132は、例えばロボット2が店舗の入口前にいると判定した場合、店舗のガードマンとしての業務に適した操作者Uを選択する。決定部132がこのように動作することで、業務に適した操作者Uが作業を実行することが可能になる。
The
(適性度に基づく操作を許容する周辺環境の決定)
決定部132は、適性度に基づいて、操作者Uがロボット2を操作することを許容する、ロボット2の操作性に影響を与える環境条件を決定してもよい。ロボット2の操作性に影響を与える環境条件は、例えば、操作装置3とロボット2との間の通信回線の通信品質、操作装置3又はロボット2の周辺の照度、又は操作者Uがロボット2を操作する時間帯である。通信品質は、例えば遅延時間の大きさ、又はデータ誤り率の大きさである。
(Determining the surrounding environment that allows operation based on aptitude)
The
決定部132は、例えば、操作者Uの適性度が高ければ高いほど、通信回線の通信品質が悪い条件であっても、操作者Uがロボット2を操作することを許可する。決定部132は、操作者Uがロボット2を操作することを許可するか否かに関する情報を操作装置3及びロボット2の少なくともいずれかに通知する。ロボット2は、操作者Uがロボット2を操作することを許可しないという通知を受けると、操作者Uが操作する操作装置3から指示情報を受信しても動作しない。
For example, the higher the suitability of the operator U, the more the
また、決定部132は、操作者Uの適性度が高ければ高いほど、操作装置3又はロボット2の周辺が劣悪な条件において、操作者Uがロボット2を操作することを許可してもよい。劣悪な条件は、例えば暗い状態、周囲の騒音レベルが高い状態、ロボット2のセンサーが濡れていることによりノイズレベルが高い状態である。決定部132は、操作者Uの適性度が閾値レベル以上である場合に、夜間の時間帯のように、トラブルが発生した時に補助する人がいない時間帯において、操作者Uがロボット2を操作することを許可してもよい。
Further, the
(適性度に基づく業務計画の決定)
決定部132は、記憶部12に記憶された、複数の操作者Uに対応する複数の適性度を参照することにより、一以上の操作者Uそれぞれがロボット2の操作を実行する順序又は時間を決定してもよい。決定部132は、例えば、複数の操作者Uが連携して実行する業務を複数の作業に分解し、複数の作業を実行するべき順序又は時間を決定する。さらに、決定部132は、複数の作業それぞれに対して求められるスキル及び遠隔操作耐性の度合いを特定する。決定部132は、複数の作業それぞれに求められるスキル及び遠隔操作耐性の度合いを満たす適性度を有する一以上の操作者Uを選択し、複数の作業それぞれに選択した操作者Uを割り当てる。このようにして、決定部132は、複数の操作者Uが作業を実行する順序又は時間を決定する。
(Determination of business plan based on aptitude)
The
決定部132は、操作者Uの遠隔操作耐性に基づいて、それぞれの操作者Uが作業を実行する時間の長さ、及び複数の作業間の休憩時間の長さを決定してもよい。決定部132は、例えば、ある操作者Uが、作業Aを2時間継続すると気分が悪くなり始めて、30分の休憩をすると気分が悪い状態が解消する場合、作業Aを2時間実行し、30分間の休憩の後に作業Aを2時間実行するというシナリオを作成する。決定部132は、作業Aを2時間実行した後に、作業Aよりも気分が悪くなりにくい作業Bを実行させてもよい。
The
決定部132は、例えば、気分が悪くなりやすい操作者Uが継続して作業する時間を、気分が悪くなりにくい操作者Uが継続して作業する時間よりも短くしてもよい。決定部132は、気分が悪くなりやすい操作者Uの休憩時間を長くし、気分が悪くなりにくい操作者Uの休憩時間を短くしてもよい。決定部132は、気分が悪くなりにくい作業を操作者Uが継続して実行する時間を、気分が悪くなりやすい作業を操作者Uが継続して実行する時間よりも長くしてもよい。
For example, the
決定部132は、難易度が高い第1作業を操作者Uが実行した後、第1作業よりも容易な第2作業を実行するように、作業の内容及び順序を決定してもよい。決定部132は、第1作業が、操作者Uの適性度に対して難しい作業である場合、操作者Uが第1作業を実行した後に、操作者Uの適性度に対して容易な作業である第2作業を実行することを決定する。決定部132がこのように動作することで、操作者Uに過度な負荷がかかったり、操作者Uの余裕が大きくなり過ぎたりすることを防止できる。
The
決定部132は、同一の作業に対応できる複数の操作者Uが存在する場合、複数の作業それぞれに割り当てる操作者Uの組み合わせが異なる複数の計画を作成し、作業の効率が相対的に高い計画を選択してもよい。作業の効率が高い計画は、所定の時間内に実行される作業量が相対的に高い計画、又は同一の時間内に同一の作業が実行された作業の質が相対的に高い計画である。
When there are a plurality of operators U capable of dealing with the same work, the
決定部132は、このような計画を選択するために、例えば、各作業に対して求められるスキル及び遠隔操作耐性の度合いと、各作業を担当する操作者Uの適性度が示すスキル及び遠隔操作耐性のレベルとの差を、全ての作業で合計した値が大きい計画を優先的に選択する。決定部132がこのように複数の操作者Uの適性度に基づいて、実行するべき業務に含まれる複数の作業を担当する複数の操作者Uを割り当てることで、業務の効率を向上させることができる。
In order to select such a plan, the
決定部132は、例えば、視線を1点に集中させ、手先の細かい動作が必要とされるような作業、又はロボット2が移動をせず、視界が速く大きく動かない作業をする操作者として、ロボット2を操作するスキルが相対的に高く、遠隔操作耐性が相対的に低い操作者Uを選択する。決定部132は、細かい動作が要求されないものの、頭を大きく動かす必要がある作業、壊れにくい大きなブロックを手で掴み、速いスピードで別の場所に動かしたり運んだりする作業、手を動かさず映像コンテンツを楽しむ作業をする操作者として、ロボット2を操作するスキルが相対的に低く、遠隔操作耐性が相対的に高い操作者Uを選択する。
The
(他の作業に対する適性度の利用)
決定部132は、操作者Uがロボット2を用いて特定の作業を実行することに対する適性度に基づいて、当該特定の作業に関連付けられた他の作業を実行する場合の各種の判断に用いてもよい。当該特定の作業に関連付けられた他の作業は、特定の作業に類似する動作を含む作業、又は特定の作業を含む作業等である。例えば、物を運ぶという作業をする場合、物を掴むという作業も発生する。そこで、決定部132は、物を運ぶ作業に対する操作者Uの適性度を、物を掴む作業に対する操作者Uの適性度と同一の適性度として扱ってもよい。
(Use of aptitude for other work)
The
(操作者Uとロボット2との需給状況)
決定部132は、適性度に基づいて、操作者Uとロボット2との需給状況を推定し、推定した結果を外部装置に送信してもよい。需給状況を推定するために、決定部132は、まず、複数のロボット2のそれぞれを操作可能な適性度を有する操作者Uの数を算出する。続いて、作業を実行するために必要になる一以上のロボット2を選択する。そして、選択した一以上のロボット2を操作することができる操作者Uの数を特定する。決定部132は、特定した操作者Uの数を外部装置に送信する。決定部132がこのように動作することで、作業の管理者が、どれくらいの操作者Uを確保できるかを把握することができる。
(Supply and demand situation between operator U and robot 2)
The
決定部132は、作業を実行する複数の操作者Uの適性度に基づいて、複数の操作者Uが使用できるロボット2の数を算出してもよい。決定部132は、ロボット2の数が不足する場合、複数の操作者Uが作業を実行するために必要なロボット2の種類及び台数を特定し、特定した種類及び台数を外部装置に送信してもよい。決定部132がこのように動作することで、作業の管理者が、どのようなロボット2を何台調達するべきかを把握することができる。
The
(適性度を示すデータの提供)
決定部132は、決定した適性度を示すデータを外部の装置に送信することにより、第三者(例えば他の企業)に提供してもよい。決定部132は、例えば操作者Uを特定するための情報に関連付けて適性度を示すデータを送信する。決定部132は、提供するデータの数に基づいて対価を決定してもよい。データの提供を受けた第三者は、提供されたデータに基づいて操作者Uの性格又は能力を把握することができる。
(Provision of data showing aptitude)
The
[ロボット2への指示]
以上の説明においては、ロボット2は、操作装置3から送信される指示情報に基づいて動作することが想定されていたが、ロボット2は、管理装置1から送信される指示情報に基づいて動作してもよい。
[Instructions to Robot 2]
In the above description, the
図6は、管理装置1が指示情報をロボット2に送信する場合の管理システムSの処理の流れを示す図である。図6に示す処理は、操作者Uの適性度が決定された後に行われる処理である。
FIG. 6 is a diagram showing a processing flow of the management system S when the
操作装置3は、操作者Uが行った操作内容に基づく指示情報を、ロボット2ではなく管理装置1に送信する(図6における(1))。管理装置1は、指示情報を受信すると、予め決定された操作者Uの適性度を参照し(図6における(2))、適性度に基づいて指示情報を補正する(図6における(3))。管理装置1が指示情報を補正する方法の詳細については後述する。
The
管理装置1は指示情報を補正して生成した補正後指示情報をロボット2に送信する(図6における(4))。補正後指示情報は、操作者Uよりも高い適性度を有する他の操作者が操作した場合の指示情報に相当しており、ロボット2は、補正後指示情報に基づいて動作することで、操作装置3が生成した指示情報に基づいて動作する場合よりも良い動作をすることができる。ロボット2は、受信した補正後指示情報に基づいて動作する(図6における(5))。
The
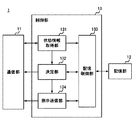
図7は、管理装置1が補正後指示情報をロボット2に送信する管理装置1の構成を示す図である。この場合、管理装置1は、操作者Uの操作内容を取得し、適性度に基づいて操作内容を補正することにより、ロボット2を動作させるための指示情報を作成し、作成した指示情報をロボット2に送信する指示送信部134をさらに有するという点で、図2に示した管理装置1と異なり、他の点で同じである。指示送信部134は、例えば情報取得部131が操作装置3から取得した操作内容を補正する。また、記憶部12には、複数の適性度それぞれに対応する、基準操作者が各種の動作をロボット2に実行させる際に行われた操作内容が記憶されている。
FIG. 7 is a diagram showing a configuration of the
具体的には、指示送信部134は、まず、操作装置3から取得された操作者Uの操作内容に基づいて、操作者Uがロボット2に実行させようとしている動きを特定する。続いて、指示送信部134は、操作装置3から取得された操作者Uの操作内容を、操作装置3から取得された操作者Uの操作内容に対応する作業に対する適性度が操作者Uよりも高い基準操作者が当該作業を実行する場合に行われる基準操作内容に置換する。指示送信部134は、操作装置3から取得された操作者Uの操作内容と基準操作内容との差を特定し、特定した差が小さくなるように操作者Uの操作内容を補正してもよい。
Specifically, the
指示送信部134は、例えば、操作者Uの操作内容が、ロボット2の手の幅よりも狭い空間にある物品を掴む操作であることを特定した場合、ロボット2の手が当該空間に収まる角度に手を回転する操作内容を加えた指示情報を作成する。補正しない場合にはロボット2の手が当該空間の両側の壁に衝突してしまうところ、指示送信部134がこのように操作内容を補正することで、ロボット2の手が壁に衝突することなく物品を掴むことが可能になり、作業効率が向上する。
When the
指示送信部134は、操作者Uの操作速度よりも速くロボット2が動作するように操作内容を補正してもよい。また、指示送信部134は、操作者Uが操作した位置よりも高い精度でロボット2が動作するように操作内容を補正してもよい。
The
指示送信部134が、このように、操作装置3から取得された操作者Uの操作内容を適性度に基づいて補正することにより指示情報を作成し、作成した指示情報に基づいてロボット2を動作させることで、操作者Uが操作しているにもかかわらず、操作者Uの適性度よりも高い適性度の他の操作者が操作した場合と同様の動作をロボット2に行わせることが可能になる。
The
指示送信部134は、操作者Uによる操作内容に基づいて、事故が発生しない確率と相関がある安全度を算出し、安全度を高めるように操作内容を補正してもよい。安全度は、例えば操作者Uの集中力の高さ、操作者Uの絶対的能力、操作者Uの動画酔いの強さ、操作者Uの疲労度に基づいて算出される。指示送信部134は、安全度を高めるために、操作装置3から送信された指示情報を無効にすることで、ロボット2の動作を停止させたり、指示情報が示す操作速度を低下させたり、ロボット2の各部が動く範囲を狭くしたりするように操作内容を補正する。
The
指示送信部134は、ロボット2の周辺の環境に基づいて、補正する内容を決定してもよい。指示送信部134は、例えば、ロボット2の可動範囲内に人や物が存在する場合と、可動範囲内に人や物が存在しない場合とで、補正が必要であると判定する閾値を変えることにより、可動範囲内に人や物が存在する場合の安全度をより高めるように操作内容を補正する。指示送信部134は、作業の困難性に基づいて、補正が必要であると判定する閾値を変えてもよい。指示送信部134は、例えば、操作者Uが困難な作業を行う場合に、容易な作業を行う場合に比べて補正をしやすくする。指示送信部134がこのように動作することで、操作者Uが困難な作業を実行しやすくなる。
The
指示送信部134は、操作内容を補正する前に、操作内容を制限することを通知するメッセージを操作装置3に送信してもよい。指示送信部134がこのように動作することで、操作者Uが操作した通りにロボット2が動作しないことに対して、操作者Uが疑念を抱くことを防止できる。また、指示送信部134は、操作内容を補正する前に、操作者Uに休憩を促すメッセージを操作装置3に送信してもよい。指示送信部134がこのようなメッセージを送信することで、操作者Uの状態を改善することが可能になる。
The
なお、図6及び図7に基づく以上の説明では、操作装置3がロボット2に指示情報を送信せず管理装置1に指示情報を送信するものとしたが、操作装置3は、ロボット2に指示情報を直接送信する場合と、管理装置1を介してロボット2に指示情報を送信する場合とを切り替えてもよい。操作装置3は、例えば、管理装置1から操作者Uの適性度を示す情報を取得し、操作者Uの適性度が所定のレベル未満であることを条件として、ロボット2に指示情報を送信せず、管理装置1に指示情報を送信する。この場合、操作装置3は、適性度が所定のレベル以上である場合に、管理装置1に指示情報を送信せず、ロボット2に直接指示情報を送信する。操作装置3がこのように動作することで、適性度が高い操作者Uが操作する場合に、補正処理に伴う遅延が発生することを抑制できるとともに、適性度が高い操作者Uが操作する場合のロボット2の動作内容を良好にすることができる。
In the above description based on FIGS. 6 and 7, it is assumed that the
[操作者Uの状態に基づくロボット2の動作の制限]
決定部132は、操作者Uがロボット2を操作している間に、操作を継続させてもよいかどうかを定期的に判定してもよい。具体的には、決定部132は、操作者Uが気分が悪くなっていないかどうかを確認するための確認用データ(例えば確認用画面)を定期的に操作装置3に送信し、操作装置3から受信した応答情報に基づいて、操作者Uが気分が悪くなっていないかどうかを確認する。
[Restriction of operation of
The
応答情報は、例えば、確認用画面を視認した操作者U自身が入力した情報、又は確認用画面を視認した後の操作者Uの動作を示す情報である。決定部132は、確認用データを送信してから応答情報を受信するまでの時間が閾値以上である場合に操作者Uが気分が悪くなっている蓋然性が高いと判定してもよい。決定部132は、例えば、操作者Uが気分が悪くなり始めていると判定した場合、操作を停止することを指示するための情報を含む画面を操作装置3に表示させる。
The response information is, for example, information input by the operator U who visually recognizes the confirmation screen, or information indicating the operation of the operator U after visually recognizing the confirmation screen. When the time from the transmission of the confirmation data to the reception of the response information is equal to or longer than the threshold value, the
決定部132は、適性度(特に、同一の操作をした後の気分の変化度合い)に基づいて判定間隔を決定し、例えば適性度が低ければ低いほど判定する時間間隔を短くしてもよい。決定部132がこのように動作することで、適性度が高い操作者Uに対して、気分の悪さを確認するための煩雑な操作を行わせる頻度を下げるとともに、適性度が低い操作者Uがロボット2を操作するべきでない状態になることを未然に防ぎやすくすることができる。
The
決定部132が、操作者Uの気分が悪くなり始めているということを検出した場合、指示送信部134は、操作者Uがロボット2を操作できる機能に制限を加えてもよい。指示送信部134は、例えば、操作者Uがロボット2を動かせる速度を所定の速度以下に制限したり、ロボット2の部位が動く範囲を制限したりする指示をロボット2に送信する。
When the
決定部132は、操作を継続させてもよいかどうかを定期的に判定した結果、適性度が基準値未満になった場合に、操作を中止することを決定してもよい。この場合、指示送信部134は、例えば、ロボット2を動作させないようにする指示情報をロボット2に送信するとともに、動作を禁止したことを操作装置3に送信する。指示送信部134は、決定部132が、適性度が基準値以上になった場合に、ロボット2に動作を許可する指示情報をロボット2に送信してもよい。
The
決定部132は、操作者Uが操作を開始する直前の操作者Uの適性度と、操作者Uが操作をしている間の適性度との関係に基づいて、操作者Uに操作を継続させるか否かを決定してもよい。決定部132は、例えば、操作者Uが操作を開始する直前の操作者Uの適性度に比べて操作者Uが操作をしている間の適性度が閾値以上低下した場合に、操作者Uに操作を中止させることを決定する。
The
[ロボット2のプロファイルの設定]
決定部132は、操作者Uがロボット2を用いて実行する作業の内容と操作者Uの適性度とに基づいて、ロボット2のプロファイルを決定し、決定したプロファイルに基づいて動作するようにロボット2に指示してもよい。プロファイルは、ロボット2の動作仕様を定める情報であり、例えば、ロボット2の動作速度、最大トルク、使用可能なセンサーの種類を定める情報である。
[
The
決定部132は、操作者Uが小売店で物品を棚に並べる作業をする場合には、当該作業用の複数のプロファイルのうち、操作者Uの適性度に基づいて選択したプロファイルをロボット2に送信する。決定部132は、建設現場で作業をする場合には、小売店での作業で用いられるプロファイルよりも大きなトルクで動くことができる建設作業用の複数のプロファイルのうち、操作者Uの適性度に基づいて選択したプロファイルをロボット2に送信する。決定部132がこのように動作することで、操作者Uが行う作業に適した状態でロボット2を動作させることが可能になる。
When the operator U arranges the articles on the shelves at the retail store, the
[操作者Uの状態を表示させる]
管理装置1の制御部13は、複数の操作者Uそれぞれの状態を表示装置(例えば他のコンピュータ)に表示させる表示制御部をさらに有してもよい。表示制御部は、例えば記憶部12に記憶された操作者Uの適性度、生産性、事故発生履歴、操作経験等の要素ごとに操作者Uのレベルを表示装置に表示させる。表示制御部は、操作者Uがロボット2を操作しているか否かの状態を示す情報を表示装置に表示させてもよい。表示制御部は、例えば、操作者Uの適性度に関連付けて、操作者Uがロボット2を操作しているか否かを示す情報を表示装置に表示させる。表示制御部がこのように動作することで、管理装置1を利用する管理者等が、複数の操作者Uの業務の状況や能力を把握することができるので、管理者等が業務の状況や能力に基づいて操作者Uに依頼する作業内容を決定しやすくなる。
[Display the status of operator U]
The
[管理システムSによる効果]
以上説明したように、管理装置1は、ロボット2の状態又は操作者Uの状態を示す状態情報に基づいて、ロボット2の状態又は操作者Uの状態を予め定められた基準レベルと比較することにより、操作者Uがロボット2を操作することに対する適性度を決定する決定部132を有する。管理装置1がこのような決定部132を有することで、操作者Uを評価する評価者が視認した内容に基づいて主観的に操作者Uを評価するのではなく、客観的なデータに基づいて操作者Uの適性度が決定される。その結果、ロボット2を操作する操作者Uの適性度の推定精度を向上させることが可能になる。
[Effect of management system S]
As described above, the
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されず、その要旨の範囲内で種々の変形及び変更が可能である。例えば、装置の分散・統合の具体的な実施の形態は、以上の実施の形態に限られず、その全部又は一部について、任意の単位で機能的又は物理的に分散・統合して構成することができる。また、複数の実施の形態の任意の組み合わせによって生じる新たな実施の形態も、本発明の実施の形態に含まれる。組み合わせによって生じる新たな実施の形態の効果は、もとの実施の形態の効果を合わせ持つ。 Although the present invention has been described above using the embodiments, the technical scope of the present invention is not limited to the scope described in the above embodiments, and various modifications and changes can be made within the scope of the gist. be. For example, the specific embodiment of the distribution / integration of the device is not limited to the above embodiment, and all or a part thereof may be functionally or physically distributed / integrated in any unit. Can be done. Also included in the embodiments of the present invention are new embodiments resulting from any combination of the plurality of embodiments. The effect of the new embodiment produced by the combination has the effect of the original embodiment together.
1 管理装置
2 ロボット
3 操作装置
11 通信部
12 記憶部
13 制御部
21 通信部
22 機構部
23 センサー部
24 記憶部
25 制御部
31 操作部
32 検出部
33 通信部
34 表示部
35 記憶部
36 制御部
131 情報取得部
132 決定部
133 記憶制御部
134 指示送信部
251 指示受信部
252 機構制御部
253 ロボット状態送信部
361 状態特定部
362 指示送信部
363 状態送信部
364 表示制御部
1
Claims (23)
前記操作者が前記ロボットに対する所定の操作を行っている間の前記操作者の身体状態を示す状態情報を取得する情報取得部と、
前記状態情報が示す前記操作者の身体状態を基準レベルと比較することにより、前記操作者が前記ロボットを操作することに対する耐性のレベルを決定する決定部と、
前記操作者を識別するための操作者識別情報に関連付けて前記耐性のレベルを記憶部に記憶させる記憶制御部と、
を有し、
前記決定部は、複数の前記操作者に対応する複数の前記耐性のレベルに基づいて、前記複数の操作者から、前記ロボットを操作させる一以上の操作者を選択する、管理装置。 It is a management device for managing the operator who operates the robot.
An information acquisition unit that acquires state information indicating the physical state of the operator while the operator is performing a predetermined operation on the robot, and an information acquisition unit.
A determination unit that determines the level of tolerance for the operator to operate the robot by comparing the physical condition of the operator indicated by the state information with the reference level.
A storage control unit that stores the level of tolerance in the storage unit in association with the operator identification information for identifying the operator.
Have a,
The determination unit is a management device that selects one or more operators to operate the robot from the plurality of operators based on the plurality of levels of resistance corresponding to the plurality of operators.
前記決定部は、前記状態情報が示す前記ロボットの複数の状態又は前記操作者の複数の状態に基づいて前記耐性のレベルを決定する、
請求項1に記載の管理装置。 The information acquisition unit acquires the state information indicating a plurality of states of the robot or a plurality of states of the operator when the operator operates the robot a plurality of times.
The determination unit determines the level of resistance based on the plurality of states of the robot or the plurality of states of the operator indicated by the state information.
The management device according to claim 1.
請求項1又は2に記載の管理装置。 The determination unit outputs the state of the robot or the operation of the robot indicated by the state information to a machine learning model that outputs information indicating the level of resistance in response to the input of the state of the robot or the state of the operator. The level of tolerance is determined based on the information output from the machine learning model by inputting the state of the person.
The management device according to claim 1 or 2.
前記決定部は、前記状態情報が示す前記操作者の気分にさらに基づいて前記耐性のレベルを決定する、
請求項1から3のいずれか一項に記載の管理装置。 The information acquisition unit further acquires the state information indicating the mood of the operator after the operator operates the robot as the state of the operator.
The determination unit determines the level of tolerance based further on the mood of the operator indicated by the state information.
The management device according to any one of claims 1 to 3.
請求項1から4のいずれか一項に記載の管理装置。 The information acquisition unit notifies the operator of a predetermined test scenario, and indicates the state of the robot or the state of the operator when the operator operates the robot based on the test scenario. Get status information,
The management device according to any one of claims 1 to 4.
請求項1から5のいずれか一項に記載の管理装置。 The determination unit does not use the state information indicating the state of the robot or the state of the operator while the state of the surroundings of the robot operated by the operator is an abnormal state, and the state around the robot is not used. The level of resistance is determined using the state information indicating the state of the robot or the state of the operator performed while the robot is in a normal state.
The management device according to any one of claims 1 to 5.
請求項1から6のいずれか一項に記載の管理装置。 The storage control unit stores the resistance level in the storage unit in association with robot identification information that identifies a plurality of different robots.
The management device according to any one of claims 1 to 6.
請求項7に記載の管理装置。 The determination unit is one or more that allows the operator to operate from the plurality of robots based on the resistance level stored in the storage unit in association with the operator identification information and the robot identification information. Select the robot,
The management device according to claim 7.
請求項1から8のいずれか一項に記載の管理装置。 The determination unit selects one or more scenarios from a plurality of scenarios used when operating the robot, based on the level of tolerance stored in the storage unit in association with the operator identification information.
The management device according to any one of claims 1 to 8.
請求項1から9のいずれか一項に記載の管理装置。 The determination unit selects one or more operation devices from a plurality of operation devices used when operating the robot based on the resistance level stored in the storage unit in association with the operator identification information. ,
The management device according to any one of claims 1 to 9.
請求項1から10のいずれか一項に記載の管理装置。 The determination unit determines an operation that can be performed by the robot when the operator operates the robot based on the level of tolerance, and determines an operation with respect to the robot operated by the operator. Send data showing the contents of
The management device according to any one of claims 1 to 10.
請求項1から10のいずれか一項に記載の管理装置。 Based on the level of tolerance, the determination unit selects auxiliary content to be notified to the operator when the operator operates the robot, and notifies the operator of data indicating the selected auxiliary content. ,
The management device according to any one of claims 1 to 10.
請求項12に記載の管理装置。 The determination unit selects, as the auxiliary content, content indicating an operation content when another operator having a resistance level higher than that of the operator operates the robot.
The management device according to claim 12.
請求項12又は13に記載の管理装置。 The determination unit determines the presentation mode of the auxiliary content based on the resistance to the operation of the operator indicated by the level of resistance.
The management device according to claim 12 or 13.
請求項1から14のいずれか一項に記載の管理装置。 Based on the level of resistance, the determination unit determines environmental conditions that affect the operability of the robot, which allows the operator to operate the robot.
The management device according to any one of claims 1 to 14.
前記決定部は、前記業務情報が示す前記業務の内容と前記耐性のレベルとに基づいて、前記操作者に対する報酬額を決定する、
請求項1から15のいずれか一項に記載の管理装置。 The information acquisition unit further acquires business information indicating the content of the business executed by the operator by operating the robot.
The determination unit determines the reward amount for the operator based on the content of the business indicated by the business information and the level of tolerance.
The management device according to any one of claims 1 to 15.
前記決定部は、複数の前記操作者に対応する複数の前記耐性のレベルに基づいて、前記複数の操作者から、前記業務情報が示す内容の業務を遂行させる一以上の操作者を選択する、
請求項1から15のいずれか一項に記載の管理装置。 The information acquisition unit further acquires business information indicating the content of the business executed by the operator by operating the robot.
The determination unit selects one or more operators from the plurality of operators to perform the business of the content indicated by the business information, based on the plurality of resistance levels corresponding to the plurality of operators.
The management device according to any one of claims 1 to 15.
請求項17に記載の管理装置。 The determination unit determines the order or time for each of the one or more operators to perform the operation of the robot by referring to the plurality of resistance levels stored in the storage unit.
The management device according to claim 17.
請求項1から18にいずれか一項に記載の管理装置。 By acquiring the operation content of the operator and correcting the operation content based on the resistance level, instruction information for operating the robot is created, and the created instruction information is transmitted to the robot. It also has an instruction transmitter,
The management device according to any one of claims 1 to 18.
請求項1から19のいずれか一項に記載の管理装置。 Further having a display control unit that causes an information terminal to display information indicating whether or not the operator is operating the robot in association with the level of tolerance of the operator determined by the determination unit.
The management device according to any one of claims 1 to 19.
請求項1から19のいずれか一項に記載の管理装置。 Further having a display control unit for displaying the resistance level stored in the storage unit on the display unit in association with the operator.
The management device according to any one of claims 1 to 19.
前記操作者が前記ロボットに対する所定の操作を行っている間の前記操作者の身体状態を示す状態情報を取得するステップと、
前記状態情報が示す前記操作者の身体状態を基準レベルと比較することにより、前記操作者が前記ロボットを操作することに対する耐性のレベルを決定するステップと、
前記操作者を識別するための操作者識別情報に関連付けて前記耐性のレベルを記憶部に記憶させるステップと、
複数の前記操作者に対応する複数の前記耐性のレベルに基づいて、前記複数の操作者から、前記ロボットを操作させる一以上の操作者を選択するステップと、
を有する管理方法。 It is a management method for managing the operator who operates the robot, which is executed by the computer.
A step of acquiring state information indicating the physical state of the operator while the operator is performing a predetermined operation on the robot, and a step of acquiring state information.
A step of determining the level of tolerance for the operator to operate the robot by comparing the physical condition of the operator indicated by the state information with the reference level.
A step of storing the resistance level in the storage unit in association with the operator identification information for identifying the operator, and
A step of selecting one or more operators to operate the robot from the plurality of operators based on a plurality of levels of resistance corresponding to the plurality of the operators.
Management method with.
前記ロボットを操作するために操作者が使用する操作装置と、
前記操作者を管理するための管理装置と、
を備え、
前記操作装置は、
前記操作者が操作した内容を示す指示情報を前記ロボットに送信する指示送信部と、
前記操作者が操作をした際の前記操作者の状態を示す操作者状態情報を前記管理装置に送信する操作者状態送信部と、
を有し、
前記ロボットは、
前記指示情報を受信する指示受信部と、
前記指示情報に基づいて機構を制御する機構制御部と、
前記機構制御部が前記機構を制御した後の前記ロボットの状態を示すロボット状態情報を前記管理装置に送信するロボット状態送信部と、
を有し、
前記管理装置は、
前記操作者が前記ロボットに対する所定の操作を行っている間の前記操作者の身体状態を示す前記操作者状態情報を取得する情報取得部と、
前記ロボット状態情報が示す前記操作者状態情報が示す前記操作者の身体状態を基準レベルと比較することにより、前記操作者が前記ロボットを操作することに対する耐性のレベルを決定する決定部と、
前記操作者を識別するための操作者識別情報に関連付けて前記耐性のレベルを記憶部に記憶させる記憶制御部と、
を有し、
前記決定部は、複数の前記操作者に対応する複数の前記耐性のレベルに基づいて、前記複数の操作者から、前記ロボットを操作させる一以上の操作者を選択する管理システム。
With a robot
An operating device used by the operator to operate the robot,
A management device for managing the operator and
Equipped with
The operating device is
An instruction transmission unit that transmits instruction information indicating the contents operated by the operator to the robot, and
An operator status transmission unit that transmits operator status information indicating the status of the operator when the operator performs an operation to the management device, and an operator status transmission unit.
Have,
The robot
An instruction receiving unit that receives the instruction information, and
A mechanism control unit that controls the mechanism based on the instruction information,
A robot state transmission unit that transmits robot state information indicating the state of the robot after the mechanism control unit controls the mechanism to the management device, and a robot state transmission unit.
Have,
The management device is
An information acquisition unit that acquires the operator state information indicating the physical state of the operator while the operator is performing a predetermined operation on the robot, and an information acquisition unit.
A determination unit that determines the level of tolerance for the operator to operate the robot by comparing the physical state of the operator indicated by the operator state information indicated by the robot state information with a reference level.
A storage control unit that stores the level of tolerance in the storage unit in association with the operator identification information for identifying the operator.
Have a,
The determination unit is a management system that selects one or more operators to operate the robot from the plurality of operators based on a plurality of levels of resistance corresponding to the plurality of operators.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019027422A JP6978453B2 (en) | 2019-02-19 | 2019-02-19 | Management device, management method and management system |
| PCT/JP2020/005828 WO2020170974A1 (en) | 2019-02-19 | 2020-02-14 | Management device, management method, and management system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019027422A JP6978453B2 (en) | 2019-02-19 | 2019-02-19 | Management device, management method and management system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020135362A JP2020135362A (en) | 2020-08-31 |
| JP2020135362A5 JP2020135362A5 (en) | 2021-07-26 |
| JP6978453B2 true JP6978453B2 (en) | 2021-12-08 |
Family
ID=72144880
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019027422A Active JP6978453B2 (en) | 2019-02-19 | 2019-02-19 | Management device, management method and management system |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6978453B2 (en) |
| WO (1) | WO2020170974A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021062426A (en) * | 2019-10-10 | 2021-04-22 | 沖電気工業株式会社 | Robot system |
| JP7477426B2 (en) | 2020-10-27 | 2024-05-01 | Kddi株式会社 | Navigation device, navigation method, and computer program |
| JP2022131206A (en) * | 2021-02-26 | 2022-09-07 | 川崎重工業株式会社 | Information processing device, learning device, information processing system, and robot system |
| WO2023053521A1 (en) * | 2021-09-30 | 2023-04-06 | ソニーグループ株式会社 | Information processing device, information processing method, and information processing system |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7991885B2 (en) * | 2007-05-09 | 2011-08-02 | Nec Corporation | Remote operation system, server, remotely operated device, remote operation service providing method |
| JP5720398B2 (en) * | 2011-04-25 | 2015-05-20 | ソニー株式会社 | Evaluation apparatus and method, service providing system, and computer program |
| CN104470735A (en) * | 2012-07-17 | 2015-03-25 | 弗莱克斯电子有限责任公司 | Vehicle climate control |
-
2019
- 2019-02-19 JP JP2019027422A patent/JP6978453B2/en active Active
-
2020
- 2020-02-14 WO PCT/JP2020/005828 patent/WO2020170974A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020135362A (en) | 2020-08-31 |
| WO2020170974A1 (en) | 2020-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6978453B2 (en) | Management device, management method and management system | |
| Kumar et al. | Survey of human–robot collaboration in industrial settings: Awareness, intelligence, and compliance | |
| US20220262504A1 (en) | Electronic arrangement for therapeutic interventions utilizing virtual or augmented reality and related method | |
| US10071481B2 (en) | Safety system for industrial robots | |
| US20210334532A1 (en) | Method and System to Control a Workflow and Method and System for Providing a Set of Task-Specific Control Parameters | |
| US11779808B2 (en) | Wearable device systems and methods for guiding physical movements | |
| EP3788542A1 (en) | Personal protective equipment system with augmented reality for safety event detection and visualization | |
| US20200388177A1 (en) | Simulated reality based confidence assessment | |
| EP2729889A2 (en) | Systems, computer medium and computer-implemented methods for providing health information to employees via augmented reality display | |
| US11443650B2 (en) | Method and apparatus for VR training | |
| US20200278755A1 (en) | Determining and evaluating data representing an action to be performed by a robot | |
| EP4197709A2 (en) | Repetitive task and contextual risk analytics for human-robot collaboration | |
| US10102769B2 (en) | Device, system and method for providing feedback to a user relating to a behavior of the user | |
| JP6462847B2 (en) | Operation evaluation apparatus, operation evaluation method, and program | |
| JP6334484B2 (en) | Glasses-type wearable device, control method thereof, and information management server | |
| WO2020189143A1 (en) | Control device and control method | |
| WO2021163334A1 (en) | Adaptive virtual rehabilitation | |
| JP2020144652A (en) | Care assistance program, care assistance device, care assistance method and care assistance system | |
| US20240082638A1 (en) | Wearable device systems and methods for movement signatures | |
| KR102277358B1 (en) | Method and appratus for vr training | |
| JP7418711B1 (en) | Attention extraction system and attention extraction method | |
| KR20220094175A (en) | System and method for monitoring of fetigue of object | |
| WO2023037691A1 (en) | A method, system, device and computer program | |
| WO2024071176A1 (en) | Visual acuity training system, visual acuity training method, and program | |
| JP2023028996A (en) | Operation device of control processing facility for dam management, control system for dam management, and control method of control processing facility for dam management |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210519 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210519 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210519 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210615 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210824 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211019 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211111 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6978453 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |