WO2017126209A1 - Ultrasonic diagnostic device and sound velocity quantification method - Google Patents
Ultrasonic diagnostic device and sound velocity quantification method Download PDFInfo
- Publication number
- WO2017126209A1 WO2017126209A1 PCT/JP2016/084124 JP2016084124W WO2017126209A1 WO 2017126209 A1 WO2017126209 A1 WO 2017126209A1 JP 2016084124 W JP2016084124 W JP 2016084124W WO 2017126209 A1 WO2017126209 A1 WO 2017126209A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sound speed
- region
- elements
- interest
- ultrasonic
- Prior art date
Links
Images




























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
Definitions
- the present invention relates to an ultrasonic diagnostic apparatus and a sound velocity quantification method, and more particularly, to sound velocity quantification in a region between an array transducer and an ultrasonic beam reflection point.
- an ultrasonic diagnostic apparatus using an ultrasonic image has been put into practical use.
- an ultrasonic beam is transmitted from an array transducer in which a plurality of elements are arranged into the subject, and ultrasonic echoes from the subject are received by the array transducer, and element data is received.
- an elemental data is electrically processed by the apparatus body to generate an ultrasonic image.
- the ultrasonic beam when an ultrasonic beam is transmitted for the purpose of improving the azimuth resolution of the ultrasonic image, the ultrasonic beam is transmitted from each element of the array transducer by focusing on each scanning line.
- the transmission focus is performed and the ultrasonic echo is received, the reception focus for aligning the time phases of the element data according to the arrangement position of each element of the array transducer is performed.
- These transmission focus and reception focus are performed using the sound velocity of the propagation medium of the ultrasonic beam, but it is necessary to estimate the sound velocity in the subject that is the propagation medium.
- a plurality of received signals obtained from a plurality of elements of an array transducer are used, and a plurality of evaluation frames are formed corresponding to a plurality of sound speed candidates, A sound speed candidate that maximizes the intensity of the signal obtained by the phasing addition processing in the evaluation frame is used as an optimum sound speed estimation value.
- phasing addition processing is performed by applying a uniform sound speed candidate to a received signal acquired by a plurality of elements of an array transducer.
- the region between the reflection points has a uniform sound velocity
- the optimum sound velocity value can be estimated, but the sound velocity in the region between the plurality of elements and the reflection point in the subject is uniform. Otherwise, there is a problem that the accuracy of sound speed estimation is lowered.
- the speed of sound is often different in a lesion area compared to other regions, and if a lesion area exists between multiple elements of an array transducer and a reflection point in a subject, the sound speed is accurately estimated. Will become difficult.
- An object of the present invention is to provide an ultrasonic diagnostic apparatus and a sound speed quantification method that can be quantified.
- the ultrasonic diagnostic apparatus transmits an ultrasonic beam from an array transducer in which a plurality of first elements are arranged toward a subject, receives an ultrasonic echo from the subject, and performs ultrasonic diagnosis
- An element data memory for storing element data; element data corresponding to a reference element that is one of the first plurality of elements; and a plurality of elements other than the reference element among the first plurality of elements
- a time difference calculator that calculates a plurality of time differences between a plurality of element data corresponding to a plurality of measurement elements, a distance from a reflection point to a reference element, and a distance from the reflection point to a plurality of measurement elements Distance and time difference
- a sound speed calculation unit that calculates a plurality of individual sound speeds corresponding to a plurality of measurement
- the sound speed calculation unit it is determined whether or not there is an individual sound speed in which the absolute value of the difference from the overall sound speed determined by the overall sound speed determination unit exceeds the speed threshold. It is preferable to provide an outlier specifying unit that specifies an area between an element corresponding to an individual sound speed at which the absolute value of the difference exceeds the speed threshold and the reflection point as an outlier. Also, calculated by the sound velocity calculation unit based on the distance to two or more elements that have received ultrasonic echoes that pass through the out-of-reflection area from the reflection point and the time difference calculated by the time difference calculation unit for the two or more elements. A local sound speed determination unit that determines a local sound speed in the out-of-range region from the at least one individual sound speed may be provided.
- a time difference calculation includes an image generation unit that generates an ultrasonic image based on a plurality of element data output from the first plurality of elements, and a region of interest setting unit that sets a region of interest on the ultrasonic image.
- the unit includes one of the plurality of second elements that has received an ultrasonic echo passing through a region other than the region of interest among the plurality of first elements, and a reference element among the plurality of second elements.
- a plurality of time differences can be calculated using elements other than the measurement elements as measurement elements.
- the sound speed calculation unit calculates the distance from the reflection point to the two or more elements that have received the ultrasonic echo passing through the region of interest and the time difference calculated by the time difference calculation unit for the two or more elements.
- a local sound speed determination unit that determines a local sound speed in the region of interest from the at least one individual sound speed may be provided.
- the total sound speed determination unit is configured to display a region of interest set by the region of interest setting unit when the region of interest set by the region of interest setting unit has at least one of a length in the scanning direction and a length in the depth direction equal to or less than a set value.
- the straight line passing through the region of interest among the plurality of straight lines connecting the reflection point and the first plurality of elements is equal to or less than a predetermined ratio It can only be configured to determine the overall sound speed.
- the local sound speed determination unit may determine the local sound speed only when the length in the scanning direction and the length in the depth direction of the region of interest set by the region of interest setting unit are both larger than the set value.
- the region-of-interest setting unit may set the region of interest by the user's specification, or may automatically set the region of interest by performing image analysis on the ultrasound image.
- the element data memory transmits a plurality of element data output from each of the first plurality of elements to the plurality of reflection points by transmitting an ultrasonic beam toward the plurality of reflection points located on different scanning lines.
- the time difference calculation unit calculates a plurality of time differences for each of the plurality of reflection points
- the sound speed calculation unit calculates a plurality of individual sound speeds for each of the plurality of reflection points
- the overall sound speed determination unit It is also possible to determine the overall sound speed based on a plurality of individual sound speeds respectively calculated for a plurality of reflection points by the sound speed calculation unit.
- the local sound speed determination unit calculates the distance from each of the plurality of reflection points to two or more elements that have received the ultrasonic echoes passing through the deviated region, and the time difference for each of the plurality of reflection points and the two or more elements.
- the local sound speed in the outlier region may be determined from the plurality of sound speeds calculated by the sound speed calculation unit based on the plurality of time differences calculated by the unit.
- the element data memory also transmits a plurality of elements that are output from the second plurality of elements to the plurality of reflection points by transmitting ultrasonic beams toward the plurality of reflection points located on different scanning lines.
- the time difference calculation unit calculates a plurality of time differences for each of the plurality of reflection points
- the sound speed calculation unit calculates a plurality of individual sound velocities for each of the plurality of reflection points.
- the local sound velocity determination unit calculates the distance from each of the plurality of reflection points to two or more elements that have received an ultrasonic echo passing through the region of interest, and the time difference for each of the plurality of reflection points and the two or more elements.
- the local sound speed in the region of interest may be determined from the plurality of sound speeds calculated by the sound speed calculation section based on the plurality of time differences calculated by the section.
- the sound velocity quantifying method is based on the first plurality of elements of the array transducer that has received the ultrasonic echo reflected by the reflection point in response to transmission of the ultrasonic beam toward the reflection point in the subject.
- a plurality of element data to be output are stored, element data corresponding to a reference element which is one element of the first plurality of elements, and a plurality of elements other than the reference element among the first plurality of elements.
- a plurality of individual sound velocities corresponding to a plurality of measurement elements are calculated based on the plurality of calculated time differences, respectively, and an overall sound speed is determined based on the calculated plurality of individual sound velocities.
- a plurality of element data output from the first plurality of elements of the array transducer are stored, one of the first plurality of elements is used as a reference element, and the remaining plurality of elements are stored.
- a plurality of measurement elements, a plurality of time differences between element data corresponding to the reference element and a plurality of element data corresponding to the plurality of measurement elements are calculated, and the distance from the reflection point to the reference element,
- a plurality of individual sound velocities corresponding to the plurality of measurement elements are calculated based on the distance from the reflection point to the plurality of measurement elements and the calculated plurality of time differences, respectively, and based on the calculated plurality of individual sound velocities. Since the overall sound speed is determined, the sound speed can be accurately quantified even when the sound speed is not uniform in the region between the first plurality of elements of the array transducer and the reflection point.
- FIG. 1 is a block diagram showing a configuration of an ultrasonic diagnostic apparatus according to Embodiment 1 of the present invention.
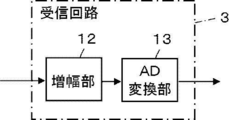
- 3 is a block diagram showing an internal configuration of a receiving circuit in the first embodiment.
- FIG. 3 is a block diagram illustrating an internal configuration of an image generation unit according to Embodiment 1.
- FIG. 4 is a block diagram showing an internal configuration of a sound speed quantification unit in Embodiment 1.
- FIG. It is a figure which shows a mode that the ultrasonic echo from the reflective point in a subject arrives at the 1st some element of an array transducer. It is a figure which shows the ultrasonic echo emitted from the reflective point in a subject and toward each element.
- FIG. 10 is a diagram illustrating a state in which an ultrasonic echo from one reflection point in the second embodiment reaches a first plurality of elements of an array transducer. It is a figure which shows a mode that the ultrasonic echo from the other reflective point in Embodiment 2 arrives at the 1st some element of an array transducer.
- 6 is a flowchart showing the operation of the ultrasonic diagnostic apparatus according to the second embodiment.
- FIG. 6 is a block diagram illustrating a configuration of an ultrasonic diagnostic apparatus according to Embodiment 3.
- FIG. 6 is a block diagram showing an internal configuration of a sound velocity quantifying unit of an ultrasonic diagnostic apparatus according to Embodiment 3.
- FIG. 10 is a diagram showing a geometric arrangement relationship between an element that has received an ultrasonic echo that passes through a region other than a region of interest in Embodiment 3 and a reflection point in a subject.
- 12 is a graph showing the time at which an ultrasonic echo from a reflection point in a subject is received by each element that has received an ultrasonic echo passing through a region other than the region of interest in the third embodiment.
- FIG. 10 is a diagram showing a geometric arrangement relationship between an element that has received an ultrasonic echo that passes through a region other than a region of interest in Embodiment 3 and a reflection point in a subject.
- 12 is a graph showing the time at which an ultrasonic echo from a reflection point in a subject
- 10 is a diagram showing a geometric arrangement relationship between an element that has received an ultrasonic echo passing through a region of interest and a reflection point in a subject in the third embodiment.
- 10 is a graph showing the time at which an ultrasonic echo from a reflection point in a subject is received by each element that has received an ultrasonic echo passing through a region of interest in the third embodiment.
- 10 is a flowchart showing the operation of the ultrasonic diagnostic apparatus according to the third embodiment.
- 10 is a flowchart showing the operation of the ultrasonic diagnostic apparatus according to the fourth embodiment.
- 10 is a flowchart showing the operation of the ultrasonic diagnostic apparatus according to the fifth embodiment.
- 3 is a flowchart showing an operation of a quantification process 100.
- 5 is a flowchart showing an operation of a quantification process 200.
- 10 is a flowchart showing an operation of an ultrasonic diagnostic apparatus according to a modification of the fifth embodiment.
- 5 is a flowchart showing an operation of a quant
- FIG. 1 shows the configuration of an ultrasonic diagnostic apparatus according to Embodiment 1 of the present invention.
- the ultrasonic diagnostic apparatus includes an array transducer 1, and a transmission circuit 2 and a reception circuit 3 are connected to the array transducer 1.
- An image generating unit 4, a display control unit 5, and a display unit 6 are sequentially connected to the receiving circuit 3.
- An element data memory 7 is connected to the receiving circuit 3, and a sound speed quantification unit 8 is connected to the element data memory 7 and the image generation unit 4.
- a control unit 9 is connected to each of the transmission circuit 2, the reception circuit 3, the image generation unit 4, the display control unit 5, and the sound speed quantification unit 8, and the operation unit 10 and the storage unit 11 are connected to the control unit 9. .
- the array transducer 1 has a first plurality of elements (ultrasonic transducers) arranged one-dimensionally or two-dimensionally. Each of these elements transmits an ultrasonic wave according to a drive signal supplied from the transmission circuit 2 and receives an ultrasonic echo from the subject to output a reception signal.
- Each element is, for example, a piezoelectric ceramic represented by PZT (lead zirconate titanate), a polymer piezoelectric element represented by PVDF (polyvinylidene fluoride), or PMN-PT (magnesium niobate / lead titanate solid solution). It is comprised by the vibrator
- each transducer When a pulsed or continuous wave voltage is applied to the electrodes of such a vibrator, the piezoelectric body expands and contracts, and pulsed or continuous wave ultrasonic waves are generated from the respective vibrators, and the synthesis of those ultrasonic waves. As a result, an ultrasonic beam is formed.
- each transducer generates an electric signal by expanding and contracting by receiving propagating ultrasonic waves, and these electric signals are output as ultrasonic reception signals.
- the transmission circuit 2 includes, for example, a plurality of pulse generators, and is transmitted from the first plurality of elements of the array transducer 1 based on the transmission delay pattern selected according to the control signal from the control unit 9.
- the delay amount of each drive signal is adjusted so as to form an ultrasonic beam by the ultrasonic wave to be supplied to the first plurality of elements.
- the reception circuit 3 has a configuration in which an amplification unit 12 and an AD (Analogue Digital) conversion unit 13 are connected in series.
- the receiving circuit 3 amplifies the reception signal output from each element of the array transducer 1 by the amplifying unit 12, and digitizes the element data obtained by the AD converting unit 13.
- the image generating unit 4 and the element data memory 7 Output to.
- the image generation unit 4 has a configuration in which a signal processing unit 14, a DSC (Digital Scan Converter) 15, and an image processing unit 16 are sequentially connected in series.
- the signal processing unit 14 Based on the reception delay pattern selected according to the control signal from the control unit 9, the signal processing unit 14 gives each element data a respective delay and adds (phased addition) according to the set sound speed.
- Receive focus processing By this reception focus processing, a sound ray signal in which the focus of the ultrasonic echo is narrowed is generated. Further, the signal processing unit 14 corrects the attenuation by the distance according to the depth of the reflection position of the ultrasonic wave on the sound ray signal, and then performs envelope detection processing to thereby obtain a tomography relating to the tissue in the subject.
- a B mode (Brightness Mode) image signal which is image information is generated.
- the DSC 15 converts (raster conversion) the B-mode image signal generated by the signal processing unit 14 into an image signal according to a normal television signal scanning method.
- the image processing unit 16 performs various necessary image processing such as gradation processing on the B-mode image signal input from the DSC 15, and then outputs the B-mode image signal to the display control unit 5.
- the display control unit 5 displays an ultrasound diagnostic image on the display unit 6 based on the B-mode image signal output from the image generation unit 4.
- the display unit 6 includes a display device such as an LCD (Liquid Crystal Display), for example, and displays an ultrasound diagnostic image under the control of the display control unit 5.
- LCD Liquid Crystal Display
- the element data memory 7 sequentially stores element data output from the receiving circuit 3.
- the sound velocity quantifying unit 8 uses the element data stored in the element data memory 7 to remove the entire sound velocity V1 indicating the sound velocity of the entire imaging area imaged by the array transducer 1 and the lesion in the imaging area.
- the local sound speed V2 indicating the sound speed of the region is quantified and output to the image generation unit 4.
- the sound speed quantification unit 8 includes a time difference calculation unit 21 and a sound speed calculation unit 22, and the sound speed calculation unit 22 includes an overall sound speed determination unit 23, an outlier region specifying unit 24, and a local sound speed.
- Each determination unit 25 is connected. Furthermore, the overall sound speed determining unit 23, the off-region specifying unit 24, and the local sound speed determining unit 25 are sequentially connected in series.
- the control unit 9 controls each unit of the ultrasonic diagnostic apparatus based on a command input from the operation unit 10 by the user.
- the operation unit 10 is for a user to perform an input operation, and can be formed from a keyboard, a mouse, a trackball, a touch panel, or the like.
- the storage unit 11 stores an operation program and the like.
- the image generation unit 4, the display control unit 5, the sound speed quantification unit 8, and the control unit 9 are composed of a CPU (CenTsal Processing Unit) and an operation program for causing the CPU to perform various processes. May be constituted by a digital circuit. Further, the image generation unit 4, the display control unit 5, the sound speed quantification unit 8, and the control unit 9 can be partially or entirely integrated into one CPU.
- the time difference calculation unit 21 corresponds to the ultrasonic wave transmitted from the first plurality of elements of the array transducer 1 toward the reflection point in the subject from among the element data stored in the element data memory 7.
- the element data output from the first plurality of elements of the array transducer 1 that has received the ultrasonic echo reflected by the reflection point is read out.
- one of the first plurality of elements of the array transducer 1 is set as a reference element, the remaining elements that are not reference elements are set as measurement elements, element data corresponding to the reference elements, By comparing the element data corresponding to each measurement element, a plurality of time differences between the element data of the reference element and the element data of each measurement element are calculated.
- n is an integer of 2 or more
- an ultrasonic beam is transmitted from the first plurality of elements E1 to En of the array transducer 1 with the reflection point A in the subject as a focal point, and reflected. It is assumed that the ultrasonic echo reflected by the point A is received by the first plurality of elements E1 to En.
- FIG. 5 is an integer of 2 or more
- the element Ec having the shortest distance from the reflection point A receives the earliest ultrasonic echo and is arranged at a position away from the element Ec. Since the distance from the reflection point A becomes larger as the element is located, the ultrasonic echo is received later.
- FIG. 7 shows a representative point of the ultrasonic echo where the maximum amplitude of the ultrasonic echo directed to each element shown in FIG. 6 is represented.
- the ultrasonic echoes that have passed through the lesion B and received by the element Es and the element Et are considered even if the geometrical positional relationship between the reflection point and each element is considered. It can be seen that the arrival time is deviated from the ultrasonic echoes received by other elements.
- s and t are integers in the range of 1 to n.
- the waveform of the element data corresponding to the first plurality of elements E1 to En and the waveform of the element data when each of the previously stored elements receives an ultrasonic echo are known patterns such as a pattern matching method.
- the time at which each element receives the ultrasonic echo can also be obtained by comparison using a method.
- the element data and the element data of the element Ek are determined by the time Tk when the element Ek receives the ultrasonic echo and the time Ti when the element Ei receives the ultrasonic echo.
- the sound speed corresponding to the area between the reflection point A in the subject and each element is the individual sound speed.
- the sound speed calculation unit 22 calculates the individual sound speed Va in the entire region R1 based on the time difference ⁇ T calculated by the time difference calculation unit 21 and the distances from the reflection point A to the elements Ei and Ek. As shown in FIG. 8, when the distance from the element Ek to the reflection point A is Lk and the distance from the element Ei to the reflection point A is Li, it corresponds to the element Ei and the element Ek based on the calculated time difference ⁇ T.
- the individual sound velocity Va can be calculated by using the two elements of the element Ei and the element Ek.
- the reference element is ultrasonic.
- a plurality of time differences ⁇ T are calculated by comparing the time when the echo is received and the time when the plurality of measuring elements receive the ultrasonic echo.
- the sound speed calculation unit 22 Based on the calculated plurality of time differences ⁇ T and the geometrical arrangement of the reflection point A and the first plurality of elements E1 to En, the sound speed calculation unit 22 generates a plurality of individual sound speeds Va corresponding to the entire region R1. Calculated.
- the total sound speed determination unit 23 determines the total sound speed V1 corresponding to the entire region R1 between the first plurality of elements E1 to En and the reflection point A. To do. For example, a histogram of a plurality of individual sound speeds Va calculated by the sound speed calculation unit 22 can be created, and the individual sound speed Va having the highest frequency can be determined as the overall sound speed V1. Note that the individual sound velocity Va corresponding to the reference element cannot be calculated by the above-described method, but can be obtained by interpolation using the individual sound speed Va corresponding to the measurement elements around the reference element. .
- the sound speed calculation unit 22 calculates a plurality of individual sound velocities Va corresponding to a plurality of measurement elements based on the time difference ⁇ T corresponding to the element for use, the graph shown in FIG. 10 is obtained.
- the individual sound velocity Va corresponding to the element Es and the element Et corresponds to an element other than the element Es and the element Et. It has a higher value than the individual sound velocity Va. This is presumably because the ultrasonic echo directed toward the element Es and the element Et passed through the lesioned part B having a higher sound speed than the surrounding sound speed, as shown in FIG.
- the overall sound speed determination unit 23 Based on the plurality of individual sound speeds Va calculated in this way, the overall sound speed determination unit 23 creates a histogram of the plurality of individual sound speeds Va, and determines the most frequent individual sound speed Va as the total sound speed V1.
- the outlier specifying unit 24 determines whether or not the absolute value of the difference ⁇ D between the total sound speed V1 determined by the total sound speed determination unit 23 and the individual sound speed Va calculated by the sound speed calculation unit 22 exceeds the speed threshold Thv. To do. That is, the difference ⁇ D between the plurality of individual sound velocities Va and the total sound speed V1 corresponding to the first plurality of elements E1 to En shown in FIG. 10 is calculated, respectively, and the absolute value and speed threshold value of each difference ⁇ D are calculated. Compare Thv.
- the speed threshold Thv is determined by the difference in sound speed assumed between the normal tissue and the diseased tissue, or the resolution of sound speed value calculation in this ultrasonic diagnostic apparatus, and is preferably 50 m / sec or less. 30 m / sec or less is more desirable, and about 10 m / sec is most desirable.
- the sound velocity calculation unit 22 calculates the individual sound velocity Vb in the deviating region R2 using the elements Es and Et that have received the ultrasonic echoes passing through the deviating region R2.
- the time when the ultrasonic echo from the reflection point A is received is recorded.
- a graph representing the time at which each element receives the ultrasonic echo as shown in FIG. 12 is obtained.
- the time difference calculation unit 21 Based on the time Ts and the time Tt at which the element Es and the element Et shown in FIG. 12 receive the ultrasonic echoes, the time difference calculation unit 21 generates a difference between the element data corresponding to the element Es and the element data corresponding to the element Et.
- a time difference ⁇ T is calculated. Then, as shown in FIG. 11, the sound velocity calculation unit 22 sets the distance from the reflection point A to the element Es as Ls, and sets the distance from the reflection point A to the element Et as Lt, and individually corresponds to the element Es and the element Et.
- time difference calculation unit 21 sets one of the plurality of elements that have received the ultrasonic echoes that have passed through the out-of-range region R2 as a reference element, and other than the reference element as a plurality of measurement elements, A plurality of time differences ⁇ T are calculated based on the time at which the reference element receives the ultrasonic echo that has passed through the out-of-range region R2 and the time at which the plurality of measurement elements have received the ultrasonic echo that has passed through the lesioned part B.
- the sound velocity calculation unit 22 Based on the calculated plurality of time differences ⁇ T and the geometrical arrangement of the plurality of elements that receive the ultrasonic echoes that have passed through the reflection point A and the detachment region R2, the sound velocity calculation unit 22 corresponds to the detachment region R2. A plurality of individual sound speeds Vb are calculated.
- a histogram is created by the local sound speed determination unit 25 based on the plurality of individual sound speeds Vb calculated in this way, and the individual sound speed Vb having the highest frequency is determined as the local sound speed V2 of the out-of-range region R2. Note that, when there are only two elements that receive ultrasonic echoes that pass through the lesion B, only one individual sound velocity Vb is calculated.
- the local sound speed determination unit 25 uses the individual sound speed Vb as the local sound velocity V2. Can be determined as
- step S1 ultrasonic waves are transmitted and received only once from the first plurality of elements E1 to En of the array transducer 1 toward the reflection point A in the subject, and element data is acquired in step S2.
- step S2 ultrasonic waves are transmitted from the first plurality of elements E1 to En to the reflection point A according to the drive signal supplied from the transmission circuit 2, and from the elements E1 to En that have received the ultrasonic echoes from the reflection point A.
- a reception signal is output to the reception circuit 3
- element data is generated by the reception circuit 3, and sequentially stored in the element data memory 7.
- step S3 the time difference calculation unit 21 compares the element data corresponding to the reference element and the element data corresponding to each measurement element, and the element data of the reference element and each measurement data are measured. A time difference ⁇ T between the element data and the element data is calculated. Further, in step S4, based on the geometric arrangement of the plurality of measurement elements of the array transducer 1 and the time difference ⁇ T, the sound speed calculation unit 22 calculates a plurality of individual sound velocities Va corresponding to the plurality of measurement elements. Based on the plurality of individual sound speeds Va calculated in this way, the overall sound speed V1 is determined by the overall sound speed determination unit 23 in step S5.
- step S6 it is determined whether or not the out-of-region R2 exists by the out-of-region specifying unit 24.
- step S7 at least one individual sound velocity Vb in the out-of-region R2 is calculated.
- step S8 the local sound speed determination unit 25 determines the local sound speed V2 in the out-of-range region R2. Note that since the absolute value of the difference ⁇ D between each individual sound velocity Va calculated in step S4 and the total sound velocity V1 is equal to or less than the speed threshold value Thv, the deviating region R2 is detected by the deviating region specifying unit 24 in step S6. Is not specified, the process proceeds to step S9, and an error display indicating that the out-of-range region R2 does not exist is displayed.
- a B-mode image signal is generated by the image generator 4 based on the element data generated by the receiving circuit 3 by scanning the ultrasonic beam from the first plurality of elements E1 to En of the array transducer 1.
- the B-mode image signal is output to the display control unit 5 and the ultrasonic image is displayed on the display unit 6.
- the total sound speed V1 and the local sound speed V2 determined by the sound speed quantification unit 8 are output to the image generation unit 4, and the values of the total sound speed V1 and the local sound speed V2 are displayed on the display unit 6 together with the ultrasonic image. Only the value of the local sound speed V2 may be displayed instead of both the overall sound speed V1 and the local sound speed V2. When it is determined that there is no region where the sound speed is locally different and error display is performed in step S9, only the entire sound speed V1 can be displayed.
- the image generation unit 4 Based on the total sound speed V1 and the local sound speed V2 output from the sound speed quantification unit 8, the image generation unit 4 generates a B-mode image signal using the total sound speed V1 for the entire area R1 excluding the outlier area R2. For the out-of-range region R2, a B-mode image signal using the local sound velocity V2 can be generated. In this way, it is possible to generate a high-quality ultrasonic image in the entire region R1 excluding the detachment region R2 and also in the detachment region R2.
- the individual sound velocities Va and Vb are any two elements, that is, the distance between the reference element and the measurement element and the reflection point A in the subject, and the element data and the measurement element corresponding to the reference element. Is calculated based on the time difference ⁇ T obtained by comparing the element data corresponding to.
- the time difference ⁇ T is reduced and the range for calculating the sound speed is narrowed, and the accuracy of calculation of the individual sound speeds Va and Vb is improved.
- the interval between the reference element and the measuring element is set wide, the range in which the sound speed is calculated is widened, and there is a possibility that the spatial resolution of the local sound speed is reduced. For this reason, it is desirable that the interval between the reference element and the measuring element is set as narrow as possible within a range in which the time resolution in the ultrasonic diagnostic apparatus can tolerate the time difference ⁇ T.
- a plurality of individual sound velocities Va while sequentially changing the reference elements without fixing the element set as the reference element to one of the first plurality of elements E1 to En. it can.
- m is an integer in the range of 1 to n ⁇ 1
- the reference element is set to Em and the measurement element is set to Em + 1
- the individual sound velocity Va is calculated while sequentially changing the value of m
- the reference element A plurality of individual sound velocities Va can be calculated while sequentially changing the element Em and the measuring element Em + 1.
- the reference element receives an ultrasonic echo that has passed through the lesioned part B. Therefore, it may be difficult to specify the lesion B, but this situation can be avoided by calculating a plurality of individual sound velocities Va while sequentially changing the reference element Em and the measurement element Em + 1. it can.
- the elements used to calculate the individual sound velocity Va do not necessarily have to be adjacent to each other.
- x is an arbitrary integer of 2 or more
- the reference element is set to Em
- the measurement element is set to Em + x.
- a plurality of individual sound velocities are provided at a rough element interval with an element interval corresponding to x elements. Va can be calculated.
- a histogram of a plurality of calculated individual sound velocities Va is created, and an element corresponding to the most frequent individual sound speed Va is set as a reference element. It is possible to avoid the lesion B having different sound speeds from being located.
- the total sound speed V1 and the local sound speed V2 are quantified by transmitting and receiving ultrasonic waves only once toward one reflection point A in the subject.
- element data obtained by transmitting and receiving ultrasonic waves once toward the reflection point Av on one scanning line Cv and as shown in FIG. 15, the scanning line Element data acquired by performing ultrasonic wave transmission / reception once toward the reflection point Aw on the scanning line Cw different from Cv is used.
- step S1 ultrasonic waves are emitted only once from the first plurality of elements E1 to En of the array transducer 1 toward the reflection point Av in the subject.
- the element data is acquired and stored in the element data memory 7 in step S2.
- step S10 it is determined whether or not the transmission / reception of ultrasonic waves to / from the plurality of set reflection points is completed. If it is determined that the transmission / reception is not completed, the reflection point is changed in step S11, and then the step is performed. S1 and S2 are repeated. That is, instead of the scanning line Cv to the scanning line Cw, ultrasonic waves are transmitted / received only once toward the reflection point Aw, and element data is acquired and stored in the element data memory 7.
- step S3 the time difference calculation unit 21 of the sound velocity quantification unit 8 corresponds to the reflection points Av and Aw respectively for reference.
- the element data corresponding to the element and the element data corresponding to the plurality of measurement elements are compared to calculate a plurality of time differences ⁇ T.
- step S4 the sound speed calculation unit 22 causes the first plurality of elements E1 to E1 to be compared.
- a plurality of individual sound velocities Va are calculated corresponding to each of the reflection points Av and Aw based on the geometrical arrangement of En and the calculated time difference ⁇ T.
- step S5 the total sound speed determination unit 23 creates a histogram of a plurality of individual sound speeds Va corresponding to the reflection points Av and Aw, and the individual sound speed Va having the highest frequency is the total sound speed V1 in the entire region R1. As determined.
- step S6 the out-of-region specifying unit 24 determines whether or not the out-of-region R2 exists for each of the reflection points Av and Aw.
- the out-of-region R2 is specified in step S7.
- the individual sound speed Vb is calculated corresponding to each of the reflection points Av and Aw in which the region R2 is specified.
- step S8 the calculated individual sound speed Vb is deviated by the local sound speed determination unit 25 from the local sound speed in the region R2. Determined as V2.
- step S6 when the outlying region R2 is specified by only one of the plurality of reflection points Av and Aw, the local sound velocity V2 can be determined for the reflection point.
- the total sound speed V1 and the local sound speed V2 can be quantified with higher accuracy.
- Embodiment 3 In the first and second embodiments, the outlier region R2 is specified and the local sound velocity V2 corresponding to the outlier region R2 is quantified.
- the region of interest R2A is set to correspond to the region of interest R2A.
- the local sound speed V2 is quantified.
- FIG. 17 shows the configuration of the ultrasonic diagnostic apparatus according to the third embodiment.
- the ultrasonic diagnostic apparatus according to the third embodiment uses a sound velocity quantifying unit 8A instead of the sound velocity quantifying unit 8 in the configuration of the ultrasonic diagnostic apparatus according to the first embodiment shown in FIG.
- the region setting unit 17 is provided, and the sound velocity quantifying unit 8A and the control unit 9 are connected to the region of interest setting unit 17.
- the sound speed quantification unit 8A includes the out-of-range region specifying unit 24 in the sound speed quantification unit 8 shown in FIG. 4 of the first embodiment.
- the time difference calculation unit 21, the overall sound speed determination unit 23, and the local sound speed determination unit 25 are each connected to the region of interest setting unit 17.
- the region-of-interest setting unit 17 sets the region of interest R2A within the imaging region imaged by the array transducer 1.
- the region of interest R2A is set, for example, according to the position of the lesion, and the region of interest setting unit 17 sets the region of interest R2A based on the user's designation input from the operation unit 10, or the image generating unit 4
- By analyzing the generated ultrasonic image it is possible to automatically set the region of interest R2A as a specific region different from the surrounding such as a lesion.
- the time difference calculation unit 21 is an element corresponding to an element that receives an ultrasonic echo that passes through the region R1A other than the region of interest R2A set by the region of interest setting unit 17 when the total sound speed determination unit 23 determines the total sound velocity V1. Based on the data, a first time difference ⁇ T1 is calculated.
- a graph as shown in FIG. 20 is obtained.
- Er represents two or more elements that have received an ultrasonic echo passing through the region of interest R2A, and the reception time of the ultrasonic echo corresponding to this element Er is blank.
- the element data of the element Ek and the element Ei are determined by the time Tk when the element Ek receives the ultrasonic echo and the time Ti when the element Ei receives the ultrasonic echo.
- the individual sound velocity Va can be calculated using two elements.
- the time difference calculation unit 21 uses one of the second plurality of elements E1 to En that has received the ultrasonic echo passing through the region R1A as a reference element, and a plurality of elements other than the reference element as measurement elements. Set to. The time difference calculation unit 21 calculates a plurality of first time differences ⁇ T1 based on the time at which each element that has received the ultrasonic echo passing through the region R1A has received the ultrasonic echo.
- the sound speed calculation unit 22 calculates a plurality of individual sound speeds Va. Then, a histogram of a plurality of individual sound speeds Va calculated by the sound speed calculation unit 22 is created by the overall sound speed determination unit 23, and the individual sound speed Va having the highest frequency is determined as the overall sound speed V1 corresponding to the region R1A.
- the average value of the plurality of individual sound speeds Va is set to the overall sound speed corresponding to the region R1A. It can also be determined as V1.
- the individual sound velocity Vb in the region of interest R2A can be calculated using the element Es and the element Et that have received the ultrasonic echo passing through the region of interest R2A.
- s and t are integers in the range of 1 to n.
- FIG. 21 when the time at which an element that receives an ultrasonic echo passing through the region of interest R2A receives the ultrasonic echo is recorded, a graph as shown in FIG. 22 is obtained.
- the reception time of the ultrasonic echo corresponding to the element other than the element Er that has received the ultrasonic echo passing through the region of interest R2A is blank.
- the distance from the reflection point A to the region of interest R2A is Ls1
- the distance in the region of interest R2A is Ls2
- the distance from the region of interest R2A to the element Es is Ls3
- the time to reach the region of interest R2A from the reflection point A is Ts1
- the time to pass the region of interest R2A is Ts2
- the time to reach the element Es from the region of interest R2A is Ts3
- the distance from the reflection point A to the region of interest R2A is Lt1
- the distance in the region of interest R2A is Lt2
- the region of interest R2A is Assuming that the distance to the element Et is Lt3, the time to reach the region of interest R2A from the reflection point A is Tt1, the time to pass through the region of interest R2A is Tt2, and the time to reach the element Es from the region of interest R2A is Ts3.
- Tt Tt1 + Tt2 + Tt3
- Tt1 + Tt3 Tt1 + Tt3
- Tt2 Tt ⁇ (Tt1 + Tt3)
- the individual sound velocity Vb corresponding to the element Es and the element Et can be calculated as Ls2) / (Tt2-Ts2).
- the time difference calculation unit 21 sets one of a plurality of elements that have received an ultrasonic echo passing through the region of interest R2A as a reference element, and other than the reference element as a plurality of measurement elements, A plurality of second time differences ⁇ T2 are calculated based on the time when the reference element receives the ultrasonic echo and the time when the plurality of measuring elements receive the ultrasonic echo. Based on the calculated second time differences ⁇ T2 and the geometrical arrangement of the plurality of elements that receive the ultrasonic echoes that have passed through the reflection point A and the region of interest R2A, the sound velocity calculation unit 22 causes the region of interest R2A to A plurality of individual sound speeds Vb are calculated.
- a histogram is created by the local sound speed determination unit 25 for the plurality of individual sound speeds Vb calculated in this manner, and the individual sound speed Vb having the highest frequency is determined as the local sound speed V2 of the region of interest R2A.
- the sound speed of the region of interest R2A is considered to be uniform. Therefore, the average value of the plurality of individual sound speeds Vb corresponding to the region of interest R2A is set as the local sound speed V2. It can also be determined.
- the local sound speed determination unit 25 uses this individual sound speed Vb as the local sound speed V2. Can be determined as
- step S12 the region of interest R2A is set by the region-of-interest setting unit 17 between the first plurality of elements E1 to En of the array transducer 1 and the reflection point A in the subject.
- step S2 ultrasonic waves are transmitted / received only once from the first plurality of elements E1 to En of the array transducer 1 toward the reflection point A in the subject, and element data is acquired in step S3. . That is, ultrasonic waves are transmitted from the first plurality of elements E1 to En to the reflection point A according to the drive signal supplied from the transmission circuit 2, and from the elements E1 to En that have received the ultrasonic echoes from the reflection point A.
- a reception signal is output to the reception circuit 3
- element data is generated by the reception circuit 3, and sequentially stored in the element data memory 7.
- step S3 one of the second plurality of elements having received the ultrasonic echo passing through the region R1A other than the region of interest R2A by the time difference calculation unit 21 is used as a reference device, and other than the reference device.
- the element is set as a plurality of measurement elements, and comparison is performed between element data corresponding to the reference element and element data corresponding to the plurality of measurement elements, and a plurality of first time differences ⁇ T1 are calculated. .
- one element is set as a reference element, and elements other than the reference element are set as a plurality of measurement elements, and elements corresponding to the reference elements A comparison is made between the data and element data corresponding to a plurality of measuring elements, and a plurality of second time differences ⁇ T2 are calculated.
- the sound speed calculation unit 22 performs a plurality of operations in the region R1A.
- the individual sound velocity Va is calculated.
- the total sound speed V1 in the region R1A is determined by the total sound speed determination unit 23 in step S5.
- step S14 based on the geometric arrangement of the plurality of elements that have received the ultrasonic echoes passing through the region of interest R2A and the plurality of second time differences ⁇ T2, the sound speed calculation unit 22 performs a plurality of operations in the region of interest R2A.
- the individual sound speed Vb is calculated.
- the local sound speed V2 in the region of interest R2A is determined by the local sound speed determination unit 25 in step S15.
- a B-mode image signal is generated by the image generator 4 based on the element data generated by the receiving circuit 3 by scanning the ultrasonic beam from the first plurality of elements E1 to En of the array transducer 1.
- the B-mode image signal is output to the display control unit 5 and the ultrasonic image is displayed on the display unit 6.
- the total sound speed V1 and the local sound speed V2 determined by the sound speed quantification unit 8 are output to the image generation unit 4, and the values of the total sound speed V1 and the local sound speed V2 are displayed on the display unit 6 together with the ultrasonic image. Only the value of the local sound speed V2 may be displayed instead of both the overall sound speed V1 and the local sound speed V2.
- the image generation unit 4 Based on the total sound speed V1 and the local sound speed V2 output from the sound speed quantification unit 8, the image generation unit 4 generates a B-mode image signal using the total sound speed V1 for the region R1A other than the region of interest R2A.
- a B-mode image signal using the local sound speed V2 can also be generated. In this way, it is possible to generate a high-quality ultrasonic image in the region R1A other than the region of interest R2A and also in the region of interest R2A.
- Embodiment 4 the total sound velocity V1 and the local sound velocity V2 are quantified by transmitting and receiving ultrasonic waves only once toward one reflection point A in the subject.
- element data obtained by transmitting and receiving ultrasonic waves once toward the reflection point Av on one scanning line Cv and as shown in FIG. 15, the scanning line Element data acquired by performing ultrasonic wave transmission / reception once toward the reflection point Aw on the scanning line Cw different from Cv is used.
- the region of interest R2A is set by the region of interest setting unit 17 in step S12, and the first plurality of elements E1 to E1 of the array transducer 1 are set in step S1.
- Ultrasonic waves are transmitted and received only once from En to the reflection point Av in the subject, and element data is acquired and stored in the element data memory 7 in step S2.
- step S10 it is determined whether or not the transmission / reception of ultrasonic waves to / from the plurality of set reflection points is completed. If it is determined that the transmission / reception is not completed, the reflection point is changed in step S11, and then the step is performed. S1 and S2 are repeated. That is, instead of the scanning line Cv to the scanning line Cw, ultrasonic waves are transmitted / received only once toward the reflection point Aw, and element data is acquired and stored in the element data memory 7.
- step S10 If it is determined in step S10 that transmission / reception of ultrasonic waves to all reflection points has been completed, the reflection point Av in the region R1A other than the region of interest R2A is detected by the time difference calculation unit 21 of the sound velocity quantification unit 8A in step S3.
- the element data corresponding to the reference element and the element data corresponding to the plurality of measurement elements are respectively compared with Aw and Aw to calculate a plurality of first time differences ⁇ T1. Further, in the region of interest R2A, the element data corresponding to the reference element and the element data corresponding to the plurality of measurement elements are respectively compared with the reflection points Av and Aw, and a plurality of second time differences ⁇ T2 are compared. Is calculated.
- the sound speed calculation unit 22 determines the reflection points Av and Aw based on the geometrical arrangement of the second plurality of elements that receive the ultrasonic echo passing through the region R1A and the plurality of first time differences ⁇ T1. Corresponding to each, a plurality of individual sound velocities Va in the region R1A are calculated. Further, in step S5, the overall sound speed determination unit 23 creates a histogram of a plurality of individual sound speeds Va corresponding to each of the reflection points Av and Aw, and the individual sound speed Va having the highest frequency is the overall sound speed V1 in the region R1A. As determined.
- each of the reflection points Av and Aw is determined based on the geometrical arrangement of the plurality of elements and the plurality of second time differences ⁇ T2 received by the sound speed calculation unit 22 through the region of interest R2A.
- the local sound speed determination unit 25 creates a histogram of a plurality of individual sound speeds Vb corresponding to each of the reflection points Av and Aw, and the individual sound speed Vb having the highest frequency is the local sound speed in the region of interest R2A. Determined as V2.
- Embodiment 5 In the above third and fourth embodiments, when the region of interest R2A is set by the region of interest setting unit 17, both the overall sound velocity V1 in the region R1A other than the region of interest R2A and the local sound velocity V2 in the region of interest R2A are determined. However, according to the size of the region of interest R2A set by the region-of-interest setting unit 17, the sound speed to be quantified can be selected from the overall sound speed V1 and the local sound speed V2.
- the ultrasonic diagnostic apparatus according to Embodiment 5 quantifies both the total sound speed V1 and the local sound speed V2 when both the length in the scanning direction and the length in the depth direction of the region of interest R2A are larger than the set values. When at least one of the length in the scanning direction and the length in the depth direction of the region of interest R2A is equal to or less than the set value, only the total sound speed V1 is quantified without quantifying the local sound speed V2. is there.
- FIG. 25 shows the operation of the ultrasonic diagnostic apparatus according to the fifth embodiment.
- the region of interest R2A is set by the region of interest setting unit 17, and in step S1, the first plurality of elements E1 to En of the array transducer 1 is directed only once toward the reflection point A in the subject.
- Ultrasonic waves are transmitted and received, and element data is acquired and stored in the element data memory 7 in step S2.
- step S16 the controller 9 determines whether or not a condition Y1 regarding the length in the scanning direction and the length in the depth direction of the region of interest R2A is satisfied.
- the condition Y1 is a condition that both the length in the scanning direction and the length in the depth direction of the region of interest R2A are larger than a preset set value.
- the set value can be, for example, a length of 1/10 of the arrangement pitch of the first plurality of elements E1 to En of the array transducer 1.
- the propagation time of the ultrasonic echo that reaches the element of the array transducer 1 from the reflection point through the region of interest R2A The influence of the region of interest R2A on is too small, and it becomes difficult to accurately quantify the local sound speed V2 in the region of interest R2A.
- step S16 when it is determined in step S16 that the length in the scanning direction and the length in the depth direction of the region of interest R2A are both greater than the set value and the condition Y1 is satisfied, the process proceeds to step S17, where the overall sound speed V1 and the local sound speed V1 A quantification process 100 for quantifying both the sound speeds V2 is executed.
- step S18 it is determined that the condition Y1 is not satisfied because at least one of the length in the scanning direction and the length in the depth direction of the region of interest R2A is equal to or less than a set value. If so, the process proceeds to step S18, and a quantification process 200 for quantifying only the overall sound speed V1 is executed.
- the time difference calculation unit 21 uses the time difference calculation unit 21 to store the element data stored in the element data memory 7 in the region R1A other than the region of interest R2A.
- a plurality of first time differences ⁇ T1 are calculated based on element data corresponding to the second plurality of elements that have received the acoustic echoes, and among the element data stored in the element data memory 7, the region of interest R2A
- a plurality of second time differences ⁇ T2 are calculated based on element data corresponding to the plurality of elements that have received the ultrasonic echoes passing through.
- the sound velocity calculation unit 22 calculates a plurality of individual sound velocities Va in the region R1A.
- step S5 the overall sound speed determination unit 23 calculates the overall sound speed V1 in the region R1A based on the plurality of individual sound velocities Va. It is determined. Further, in step S14, the sound speed calculation unit 22 calculates a plurality of individual sound speeds Vb in the region of interest R2A. In step S15, the local sound speed determination unit 25 calculates the local sound speeds Vb in the region of interest R2A based on the plurality of individual sound speeds Vb. The speed of sound V2 is determined.
- the time difference calculation unit 21 passes the region R1A other than the region of interest R2A among the element data stored in the element data memory 7 in step S3.
- a plurality of first time differences ⁇ T1 are calculated based on element data corresponding to the second plurality of elements that have received the ultrasonic echo.
- the sound velocity calculation unit 22 calculates a plurality of individual sound velocities Va in the region R1A.
- the overall sound speed determination unit 23 calculates the overall sound speed V1 in the region R1A based on the plurality of individual sound velocities Va. The local sound speed V2 in the region of interest R2A is not quantified.
- the region of interest R2A set by the region of interest setting unit 17 is long in the scanning direction, and the region of interest among the plurality of straight lines connecting the reflection points in the subject and the first plurality of elements E1 to En of the array transducer 1
- a predetermined ratio for example, 80%
- a condition where the straight line passing through the region of interest R2A out of a plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of the array transducer 1 exceeds a predetermined ratio (for example, 80%) is defined as a condition Y2.
- a predetermined ratio for example, 80%
- step S19 the condition is that the straight line passing through the region of interest R2A among the plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of the array transducer 1 is equal to or less than a predetermined ratio (for example, 80%).
- a predetermined ratio for example, 80%.
- step S3 the time difference calculation unit 21 receives an ultrasonic echo that passes through the region of interest R2A among the element data stored in the element data memory 7. A plurality of second time differences ⁇ T2 are calculated based on element data corresponding to the plurality of elements.
- the sound speed calculation unit 22 calculates a plurality of individual sound speeds Vb in the region of interest R2A.
- step S15 the local sound speed determination unit 25 calculates the local sound speed V2 of the region of interest R2A based on the plurality of individual sound speeds Vb.
- the total sound speed V1 is not quantified.
- the high accuracy Quantification of sound speed is possible.
- the total sound speed V1 and the local sound speed V2 are quantified using a plurality of reflection points, depending on the size of the region of interest R2A set by the region of interest setting unit 17, etc.
- the sound speed to be quantified can be selected from the overall sound speed V1 and the local sound speed V2. Note that even if the reflection point is changed, the length in the scanning direction and the length in the depth direction of the region of interest R2A do not change. Therefore, the determination in step S16 as to whether or not the condition Y1 is satisfied is determined by a plurality of reflection points. Produces the same result.
- the ratio of the straight line passing through the region of interest R2A among the plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of the array transducer 1 varies depending on the position of the reflection point.
- the determination in step S19 as to whether or not is true may give different results for a plurality of reflection points.
- the region of interest R2A when the condition Y2 in step S19 is not satisfied that is, when the first plurality of elements E1 to En of the array transducer 1 are connected by a plurality of straight lines.
- the total sound speed V1 quantified in the quantification process 100 in step S17 with respect to the reflection point other than the region of interest R2A It can be employed as the sound speed of the region R1A.
- the control unit 9 determines whether or not the condition Y1 in step S16 is satisfied and whether or not the condition Y2 in step S19 is satisfied.
- the local sound speed determination unit 25 can also be configured to make these determinations.
- the total sound speed V1 and the local sound speed V2 are output using the element data output from the first plurality of elements E1 to En of the array transducer 1, amplified by the receiving circuit 3, and digitized.
- the present invention is not limited to this, and the total sound velocity V1 and the local sound velocity V2 can also be quantified using element data that has been digitized and phase-matched.
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
This ultrasonic diagnostic device transmits an ultrasonic beam to a subject from an array transducer in which a plurality of first elements are arranged, and receives an ultrasonic echo from the subject to perform ultrasonic diagnosis. The ultrasonic diagnostic device is provided with: an element data memory (7) which stores a plurality of element data which are output from the plurality of first elements that received an ultrasonic echo reflected by a reflection point in the subject as a result of transmission of an ultrasonic beam to the reflection point; a time difference calculation unit (21) which calculates a plurality of time differences between element data corresponding to a reference element which is one of the plurality of first elements and a plurality of element data corresponding to a plurality of measurement elements which are elements other than the reference element of the plurality of first elements; a sound velocity calculation unit (22) which calculates a plurality of individual sound velocities corresponding to the plurality of measurement elements on the basis of the distance from the reflection point to the reference element, the distances from the reflection point to the plurality of measurement elements, and the plurality of time differences calculated by the time difference calculation unit (21); and an overall sound velocity determination unit (23) which determines the overall sound velocity on the basis of the individual sound velocities calculated by the sound velocity calculation unit (22).
Description
この発明は、超音波診断装置および音速定量化方法に係り、特に、アレイトランスデューサと超音波ビームの反射点との間の領域における音速の定量化に関する。
The present invention relates to an ultrasonic diagnostic apparatus and a sound velocity quantification method, and more particularly, to sound velocity quantification in a region between an array transducer and an ultrasonic beam reflection point.
従来から、医療分野において、超音波画像を利用した超音波診断装置が実用化されている。一般に、この種の超音波診断装置では、複数の素子が配列されたアレイトランスデューサから被検体内に向けて超音波ビームを送信し、被検体からの超音波エコーをアレイトランスデューサで受信して素子データを取得し、素子データを装置本体で電気的に処理することにより超音波画像が生成される。
Conventionally, in the medical field, an ultrasonic diagnostic apparatus using an ultrasonic image has been put into practical use. In general, in this type of ultrasonic diagnostic apparatus, an ultrasonic beam is transmitted from an array transducer in which a plurality of elements are arranged into the subject, and ultrasonic echoes from the subject are received by the array transducer, and element data is received. And an elemental data is electrically processed by the apparatus body to generate an ultrasonic image.
このような超音波診断装置においては、超音波画像の方位分解能を向上させる目的で、超音波ビームを送信する際に、各走査線上に焦点を定めてアレイトランスデューサの各素子から超音波ビームを送信する送信フォーカスが行われ、超音波エコーを受信する際には、アレイトランスデューサの各素子の配置位置に応じて素子データの時相を揃える受信フォーカスが行われる。
これらの送信フォーカスおよび受信フォーカスは、超音波ビームの伝搬媒質の音速を用いて行われるが、伝搬媒質である被検体内における音速を推定する必要がある。 In such an ultrasonic diagnostic apparatus, when an ultrasonic beam is transmitted for the purpose of improving the azimuth resolution of the ultrasonic image, the ultrasonic beam is transmitted from each element of the array transducer by focusing on each scanning line. When the transmission focus is performed and the ultrasonic echo is received, the reception focus for aligning the time phases of the element data according to the arrangement position of each element of the array transducer is performed.
These transmission focus and reception focus are performed using the sound velocity of the propagation medium of the ultrasonic beam, but it is necessary to estimate the sound velocity in the subject that is the propagation medium.
これらの送信フォーカスおよび受信フォーカスは、超音波ビームの伝搬媒質の音速を用いて行われるが、伝搬媒質である被検体内における音速を推定する必要がある。 In such an ultrasonic diagnostic apparatus, when an ultrasonic beam is transmitted for the purpose of improving the azimuth resolution of the ultrasonic image, the ultrasonic beam is transmitted from each element of the array transducer by focusing on each scanning line. When the transmission focus is performed and the ultrasonic echo is received, the reception focus for aligning the time phases of the element data according to the arrangement position of each element of the array transducer is performed.
These transmission focus and reception focus are performed using the sound velocity of the propagation medium of the ultrasonic beam, but it is necessary to estimate the sound velocity in the subject that is the propagation medium.
例えば、特許文献1に開示された超音波診断装置では、アレイトランスデューサの複数の素子から得られる複数の受波信号を用い、複数の音速の候補に対応して複数の評価用フレームを形成し、評価用フレーム内の整相加算処理により得られる信号の強度が最大になる音速の候補を最適な音速の推定値としている。
For example, in the ultrasonic diagnostic apparatus disclosed in Patent Document 1, a plurality of received signals obtained from a plurality of elements of an array transducer are used, and a plurality of evaluation frames are formed corresponding to a plurality of sound speed candidates, A sound speed candidate that maximizes the intensity of the signal obtained by the phasing addition processing in the evaluation frame is used as an optimum sound speed estimation value.
しかしながら、特許文献1の装置では、アレイトランスデューサの複数の素子により取得される受波信号に対して一律の音速の候補を適用して整相加算処理を行うため、複数の素子と被検体内の反射点との間の領域が一様な音速を有する場合には、最適な音速値を推定することができるものの、複数の素子と被検体内の反射点との間の領域における音速が一様でない場合には、音速推定の精度が低下するという問題がある。
特に、病変部においては、他の領域に比べて音速が異なることが多く、アレイトランスデューサの複数の素子と被検体内の反射点との間に病変部が存在すると、音速を精度よく推定することが困難になってしまう。 However, in the apparatus ofPatent Document 1, phasing addition processing is performed by applying a uniform sound speed candidate to a received signal acquired by a plurality of elements of an array transducer. When the region between the reflection points has a uniform sound velocity, the optimum sound velocity value can be estimated, but the sound velocity in the region between the plurality of elements and the reflection point in the subject is uniform. Otherwise, there is a problem that the accuracy of sound speed estimation is lowered.
In particular, the speed of sound is often different in a lesion area compared to other regions, and if a lesion area exists between multiple elements of an array transducer and a reflection point in a subject, the sound speed is accurately estimated. Will become difficult.
特に、病変部においては、他の領域に比べて音速が異なることが多く、アレイトランスデューサの複数の素子と被検体内の反射点との間に病変部が存在すると、音速を精度よく推定することが困難になってしまう。 However, in the apparatus of
In particular, the speed of sound is often different in a lesion area compared to other regions, and if a lesion area exists between multiple elements of an array transducer and a reflection point in a subject, the sound speed is accurately estimated. Will become difficult.
この発明は、このような従来の問題点を解消するためになされたもので、アレイトランスデューサの複数の素子と反射点との間の領域における音速が一様でない場合であっても精度よく音速を定量化することができる超音波診断装置および音速定量化方法を提供することを目的とする。
The present invention has been made to solve such a conventional problem. Even when the sound speed in the region between the plurality of elements of the array transducer and the reflection point is not uniform, the sound speed can be accurately obtained. An object of the present invention is to provide an ultrasonic diagnostic apparatus and a sound speed quantification method that can be quantified.
この発明に係る超音波診断装置は、第1の複数の素子が配列されたアレイトランスデューサから被検体に向けて超音波ビームを送信し、被検体による超音波エコーを受信して超音波診断を行う超音波診断装置であって、被検体内の反射点に向けた超音波ビームの送信に対応して反射点により反射される超音波エコーを受信した第1の複数の素子から出力される複数の素子データを保存する素子データメモリと、第1の複数の素子のうちの1つの素子である参考用素子に対応する素子データと、第1の複数の素子のうち参考用素子以外の複数の素子である複数の測定用素子に対応する複数の素子データとの間の複数の時間差を算出する時間差算出部と、反射点から参考用素子までの距離と、反射点から複数の測定用素子までの距離と、時間差算出部により算出された複数の時間差に基づいて、複数の測定用素子に対応する複数の個別音速をそれぞれ算出する音速算出部と、音速算出部により算出された複数の個別音速に基づいて全体音速を決定する全体音速決定部とを備えるものである。
The ultrasonic diagnostic apparatus according to the present invention transmits an ultrasonic beam from an array transducer in which a plurality of first elements are arranged toward a subject, receives an ultrasonic echo from the subject, and performs ultrasonic diagnosis In the ultrasonic diagnostic apparatus, a plurality of outputs output from a plurality of first elements that receive an ultrasonic echo reflected by a reflection point in response to transmission of an ultrasonic beam toward the reflection point in the subject An element data memory for storing element data; element data corresponding to a reference element that is one of the first plurality of elements; and a plurality of elements other than the reference element among the first plurality of elements A time difference calculator that calculates a plurality of time differences between a plurality of element data corresponding to a plurality of measurement elements, a distance from a reflection point to a reference element, and a distance from the reflection point to a plurality of measurement elements Distance and time difference A sound speed calculation unit that calculates a plurality of individual sound speeds corresponding to a plurality of measurement elements based on a plurality of time differences calculated by the output unit, and an overall sound speed based on the plurality of individual sound speeds calculated by the sound speed calculation unit And an overall sound speed determining unit.
音速算出部により算出された複数の個別音速の中に、全体音速決定部により決定された全体音速との差分の絶対値が速度しきい値を越える個別音速が存在するか否かを判定し、差分の絶対値が速度しきい値を越える個別音速に対応する素子と反射点との間の領域を外れ領域として特定する外れ領域特定部を備えることが好ましい。
また、反射点から外れ領域を通る超音波エコーを受信した2つ以上の素子までの距離と、2つ以上の素子に対して時間差算出部により算出された時間差とに基づいて音速算出部により算出された少なくとも1つの個別音速から、外れ領域内における局所音速を決定する局所音速決定部を備えていてもよい。 In the plurality of individual sound speeds calculated by the sound speed calculation unit, it is determined whether or not there is an individual sound speed in which the absolute value of the difference from the overall sound speed determined by the overall sound speed determination unit exceeds the speed threshold, It is preferable to provide an outlier specifying unit that specifies an area between an element corresponding to an individual sound speed at which the absolute value of the difference exceeds the speed threshold and the reflection point as an outlier.
Also, calculated by the sound velocity calculation unit based on the distance to two or more elements that have received ultrasonic echoes that pass through the out-of-reflection area from the reflection point and the time difference calculated by the time difference calculation unit for the two or more elements. A local sound speed determination unit that determines a local sound speed in the out-of-range region from the at least one individual sound speed may be provided.
また、反射点から外れ領域を通る超音波エコーを受信した2つ以上の素子までの距離と、2つ以上の素子に対して時間差算出部により算出された時間差とに基づいて音速算出部により算出された少なくとも1つの個別音速から、外れ領域内における局所音速を決定する局所音速決定部を備えていてもよい。 In the plurality of individual sound speeds calculated by the sound speed calculation unit, it is determined whether or not there is an individual sound speed in which the absolute value of the difference from the overall sound speed determined by the overall sound speed determination unit exceeds the speed threshold, It is preferable to provide an outlier specifying unit that specifies an area between an element corresponding to an individual sound speed at which the absolute value of the difference exceeds the speed threshold and the reflection point as an outlier.
Also, calculated by the sound velocity calculation unit based on the distance to two or more elements that have received ultrasonic echoes that pass through the out-of-reflection area from the reflection point and the time difference calculated by the time difference calculation unit for the two or more elements. A local sound speed determination unit that determines a local sound speed in the out-of-range region from the at least one individual sound speed may be provided.
第1の複数の素子から出力される複数の素子データに基づいて超音波画像を生成する画像生成部と、超音波画像上に関心領域を設定するための関心領域設定部とを備え、時間差算出部は、第1の複数の素子のうち関心領域以外の領域を通る超音波エコーを受信した第2の複数の素子のうちの1つの素子を参考用素子、第2の複数の素子のうち参考用素子以外の素子を測定用素子として複数の時間差を算出するように構成することができる。
さらに、反射点から関心領域を通る超音波エコーを受信した2つ以上の素子までの距離と、2つ以上の素子に対して時間差算出部により算出された時間差とに基づいて音速算出部により算出された少なくとも1つの個別音速から、関心領域内における局所音速を決定する局所音速決定部を備えていてもよい。 A time difference calculation includes an image generation unit that generates an ultrasonic image based on a plurality of element data output from the first plurality of elements, and a region of interest setting unit that sets a region of interest on the ultrasonic image. The unit includes one of the plurality of second elements that has received an ultrasonic echo passing through a region other than the region of interest among the plurality of first elements, and a reference element among the plurality of second elements. A plurality of time differences can be calculated using elements other than the measurement elements as measurement elements.
Furthermore, the sound speed calculation unit calculates the distance from the reflection point to the two or more elements that have received the ultrasonic echo passing through the region of interest and the time difference calculated by the time difference calculation unit for the two or more elements. A local sound speed determination unit that determines a local sound speed in the region of interest from the at least one individual sound speed may be provided.
さらに、反射点から関心領域を通る超音波エコーを受信した2つ以上の素子までの距離と、2つ以上の素子に対して時間差算出部により算出された時間差とに基づいて音速算出部により算出された少なくとも1つの個別音速から、関心領域内における局所音速を決定する局所音速決定部を備えていてもよい。 A time difference calculation includes an image generation unit that generates an ultrasonic image based on a plurality of element data output from the first plurality of elements, and a region of interest setting unit that sets a region of interest on the ultrasonic image. The unit includes one of the plurality of second elements that has received an ultrasonic echo passing through a region other than the region of interest among the plurality of first elements, and a reference element among the plurality of second elements. A plurality of time differences can be calculated using elements other than the measurement elements as measurement elements.
Furthermore, the sound speed calculation unit calculates the distance from the reflection point to the two or more elements that have received the ultrasonic echo passing through the region of interest and the time difference calculated by the time difference calculation unit for the two or more elements. A local sound speed determination unit that determines a local sound speed in the region of interest from the at least one individual sound speed may be provided.
全体音速決定部は、関心領域設定部により設定された関心領域の走査方向の長さおよび深度方向の長さの少なくとも一方が設定値以下の場合、および、関心領域設定部により設定された関心領域の走査方向の長さおよび深度方向の長さがいずれも設定値より大きく且つ反射点と第1の複数の素子とを結ぶ複数の直線のうち関心領域を通る直線が所定の割合以下の場合にのみ全体音速を決定するように構成することができる。
また、局所音速決定部は、関心領域設定部により設定された関心領域の走査方向の長さおよび深度方向の長さがいずれも設定値より大きい場合にのみ局所音速を決定してもよい。 The total sound speed determination unit is configured to display a region of interest set by the region of interest setting unit when the region of interest set by the region of interest setting unit has at least one of a length in the scanning direction and a length in the depth direction equal to or less than a set value. When the length in the scanning direction and the length in the depth direction are both larger than the set value, and the straight line passing through the region of interest among the plurality of straight lines connecting the reflection point and the first plurality of elements is equal to or less than a predetermined ratio It can only be configured to determine the overall sound speed.
Further, the local sound speed determination unit may determine the local sound speed only when the length in the scanning direction and the length in the depth direction of the region of interest set by the region of interest setting unit are both larger than the set value.
また、局所音速決定部は、関心領域設定部により設定された関心領域の走査方向の長さおよび深度方向の長さがいずれも設定値より大きい場合にのみ局所音速を決定してもよい。 The total sound speed determination unit is configured to display a region of interest set by the region of interest setting unit when the region of interest set by the region of interest setting unit has at least one of a length in the scanning direction and a length in the depth direction equal to or less than a set value. When the length in the scanning direction and the length in the depth direction are both larger than the set value, and the straight line passing through the region of interest among the plurality of straight lines connecting the reflection point and the first plurality of elements is equal to or less than a predetermined ratio It can only be configured to determine the overall sound speed.
Further, the local sound speed determination unit may determine the local sound speed only when the length in the scanning direction and the length in the depth direction of the region of interest set by the region of interest setting unit are both larger than the set value.
関心領域設定部は、ユーザの指定により関心領域を設定してもよく、あるいは、超音波画像を画像解析することにより自動的に関心領域を設定してもよい。
素子データメモリは、互いに異なる走査線上に位置する複数の反射点に向けて超音波ビームを送信することにより複数の反射点に対してそれぞれ第1の複数の素子から出力される複数の素子データを保存し、時間差算出部は、複数の反射点に対してそれぞれ複数の時間差を算出し、音速算出部は、複数の反射点に対してそれぞれ複数の個別音速を算出し、全体音速決定部は、音速算出部により複数の反射点に対してそれぞれ算出された複数の個別音速に基づいて全体音速を決定することもできる。 The region-of-interest setting unit may set the region of interest by the user's specification, or may automatically set the region of interest by performing image analysis on the ultrasound image.
The element data memory transmits a plurality of element data output from each of the first plurality of elements to the plurality of reflection points by transmitting an ultrasonic beam toward the plurality of reflection points located on different scanning lines. The time difference calculation unit calculates a plurality of time differences for each of the plurality of reflection points, the sound speed calculation unit calculates a plurality of individual sound speeds for each of the plurality of reflection points, and the overall sound speed determination unit It is also possible to determine the overall sound speed based on a plurality of individual sound speeds respectively calculated for a plurality of reflection points by the sound speed calculation unit.
素子データメモリは、互いに異なる走査線上に位置する複数の反射点に向けて超音波ビームを送信することにより複数の反射点に対してそれぞれ第1の複数の素子から出力される複数の素子データを保存し、時間差算出部は、複数の反射点に対してそれぞれ複数の時間差を算出し、音速算出部は、複数の反射点に対してそれぞれ複数の個別音速を算出し、全体音速決定部は、音速算出部により複数の反射点に対してそれぞれ算出された複数の個別音速に基づいて全体音速を決定することもできる。 The region-of-interest setting unit may set the region of interest by the user's specification, or may automatically set the region of interest by performing image analysis on the ultrasound image.
The element data memory transmits a plurality of element data output from each of the first plurality of elements to the plurality of reflection points by transmitting an ultrasonic beam toward the plurality of reflection points located on different scanning lines. The time difference calculation unit calculates a plurality of time differences for each of the plurality of reflection points, the sound speed calculation unit calculates a plurality of individual sound speeds for each of the plurality of reflection points, and the overall sound speed determination unit It is also possible to determine the overall sound speed based on a plurality of individual sound speeds respectively calculated for a plurality of reflection points by the sound speed calculation unit.
局所音速決定部は、複数の反射点の各々から外れ領域を通る超音波エコーを受信した2つ以上の素子までの距離と、複数の反射点の各々と2つ以上の素子に対して時間差算出部により算出された複数の時間差とに基づいて音速算出部により算出された複数の音速から、外れ領域内における局所音速を決定してもよい。
The local sound speed determination unit calculates the distance from each of the plurality of reflection points to two or more elements that have received the ultrasonic echoes passing through the deviated region, and the time difference for each of the plurality of reflection points and the two or more elements. The local sound speed in the outlier region may be determined from the plurality of sound speeds calculated by the sound speed calculation unit based on the plurality of time differences calculated by the unit.
また、素子データメモリは、互いに異なる走査線上に位置する複数の反射点に向けて超音波ビームを送信することにより複数の反射点に対してそれぞれ第2の複数の素子から出力される複数の素子データを保存し、時間差算出部は、複数の反射点に対してそれぞれ複数の時間差を算出し、音速算出部は、複数の反射点に対してそれぞれ複数の個別音速を算出し、全体音速決定部は、音速算出部により複数の反射点に対してそれぞれ算出された複数の個別音速に基づいて全体音速を決定することもできる。
The element data memory also transmits a plurality of elements that are output from the second plurality of elements to the plurality of reflection points by transmitting ultrasonic beams toward the plurality of reflection points located on different scanning lines. The time difference calculation unit calculates a plurality of time differences for each of the plurality of reflection points, and the sound speed calculation unit calculates a plurality of individual sound velocities for each of the plurality of reflection points. Can also determine the overall sound speed based on a plurality of individual sound speeds respectively calculated for a plurality of reflection points by the sound speed calculation unit.
局所音速決定部は、複数の反射点の各々から関心領域を通る超音波エコーを受信した2つ以上の素子までの距離と、複数の反射点の各々と2つ以上の素子に対して時間差算出部により算出された複数の時間差とに基づいて音速算出部により算出された複数の音速から、関心領域内における局所音速を決定してもよい。
The local sound velocity determination unit calculates the distance from each of the plurality of reflection points to two or more elements that have received an ultrasonic echo passing through the region of interest, and the time difference for each of the plurality of reflection points and the two or more elements. The local sound speed in the region of interest may be determined from the plurality of sound speeds calculated by the sound speed calculation section based on the plurality of time differences calculated by the section.
この発明に係る音速定量化方法は、被検体内の反射点に向けた超音波ビームの送信に対応して反射点により反射される超音波エコーを受信したアレイトランスデューサの第1の複数の素子から出力される複数の素子データを保存し、第1の複数の素子のうちの1つの素子である参考用素子に対応する素子データと、第1の複数の素子のうち参考用素子以外の複数の素子である複数の測定用素子に対応する複数の素子データとの間の複数の時間差を算出し、反射点から参考用素子までの距離と、反射点から複数の測定用素子までの距離と、算出された複数の時間差に基づいて、複数の測定用素子に対応する複数の個別音速をそれぞれ算出し、算出された複数の個別音速に基づいて全体音速を決定するものである。
The sound velocity quantifying method according to the present invention is based on the first plurality of elements of the array transducer that has received the ultrasonic echo reflected by the reflection point in response to transmission of the ultrasonic beam toward the reflection point in the subject. A plurality of element data to be output are stored, element data corresponding to a reference element which is one element of the first plurality of elements, and a plurality of elements other than the reference element among the first plurality of elements. Calculate a plurality of time differences between a plurality of element data corresponding to a plurality of measurement elements that are elements, a distance from a reflection point to a reference element, a distance from a reflection point to a plurality of measurement elements, A plurality of individual sound velocities corresponding to a plurality of measurement elements are calculated based on the plurality of calculated time differences, respectively, and an overall sound speed is determined based on the calculated plurality of individual sound velocities.
この発明によれば、アレイトランスデューサの第1の複数の素子から出力される複数の素子データを保存し、第1の複数の素子のうちの1つの素子を参考用素子、残りの複数の素子を複数の測定用素子とし、参考用素子に対応する素子データと複数の測定用素子に対応する複数の素子データとの間の複数の時間差を算出し、反射点から参考用素子までの距離と、反射点から複数の測定用素子までの距離と、算出された複数の時間差に基づいて、複数の測定用素子に対応する複数の個別音速をそれぞれ算出し、算出された複数の個別音速に基づいて全体音速を決定するので、アレイトランスデューサの第1の複数の素子と反射点との間の領域における音速が一様でない場合であっても精度よく音速を定量化することができる。
According to this invention, a plurality of element data output from the first plurality of elements of the array transducer are stored, one of the first plurality of elements is used as a reference element, and the remaining plurality of elements are stored. A plurality of measurement elements, a plurality of time differences between element data corresponding to the reference element and a plurality of element data corresponding to the plurality of measurement elements are calculated, and the distance from the reflection point to the reference element, A plurality of individual sound velocities corresponding to the plurality of measurement elements are calculated based on the distance from the reflection point to the plurality of measurement elements and the calculated plurality of time differences, respectively, and based on the calculated plurality of individual sound velocities. Since the overall sound speed is determined, the sound speed can be accurately quantified even when the sound speed is not uniform in the region between the first plurality of elements of the array transducer and the reflection point.
以下、この発明の実施の形態を添付図面に基づいて説明する。
実施の形態1
図1に、この発明の実施の形態1に係る超音波診断装置の構成を示す。超音波診断装置は、アレイトランスデューサ1を備え、このアレイトランスデューサ1に送信回路2および受信回路3が接続されている。受信回路3には、画像生成部4、表示制御部5および表示部6が順次接続されている。また、受信回路3に素子データメモリ7が接続され、素子データメモリ7および画像生成部4に音速定量化部8が接続されている。
さらに、送信回路2、受信回路3、画像生成部4、表示制御部5および音速定量化部8にそれぞれ制御部9が接続され、制御部9に操作部10と格納部11が接続されている。 Embodiments of the present invention will be described below with reference to the accompanying drawings.
Embodiment 1
FIG. 1 shows the configuration of an ultrasonic diagnostic apparatus according toEmbodiment 1 of the present invention. The ultrasonic diagnostic apparatus includes an array transducer 1, and a transmission circuit 2 and a reception circuit 3 are connected to the array transducer 1. An image generating unit 4, a display control unit 5, and a display unit 6 are sequentially connected to the receiving circuit 3. An element data memory 7 is connected to the receiving circuit 3, and a sound speed quantification unit 8 is connected to the element data memory 7 and the image generation unit 4.
Further, acontrol unit 9 is connected to each of the transmission circuit 2, the reception circuit 3, the image generation unit 4, the display control unit 5, and the sound speed quantification unit 8, and the operation unit 10 and the storage unit 11 are connected to the control unit 9. .
実施の形態1
図1に、この発明の実施の形態1に係る超音波診断装置の構成を示す。超音波診断装置は、アレイトランスデューサ1を備え、このアレイトランスデューサ1に送信回路2および受信回路3が接続されている。受信回路3には、画像生成部4、表示制御部5および表示部6が順次接続されている。また、受信回路3に素子データメモリ7が接続され、素子データメモリ7および画像生成部4に音速定量化部8が接続されている。
さらに、送信回路2、受信回路3、画像生成部4、表示制御部5および音速定量化部8にそれぞれ制御部9が接続され、制御部9に操作部10と格納部11が接続されている。 Embodiments of the present invention will be described below with reference to the accompanying drawings.
FIG. 1 shows the configuration of an ultrasonic diagnostic apparatus according to
Further, a
アレイトランスデューサ1は、1次元または2次元に配列された第1の複数の素子(超音波トランスデューサ)を有している。これらの素子は、それぞれ送信回路2から供給される駆動信号に従って超音波を送信すると共に被検体からの超音波エコーを受信して受信信号を出力する。各素子は、例えば、PZT(チタン酸ジルコン酸鉛)に代表される圧電セラミックや、PVDF(ポリフッ化ビニリデン)に代表される高分子圧電素子、PMN-PT(マグネシウムニオブ酸・チタン酸鉛固溶体)に代表される圧電単結晶等からなる圧電体の両端に電極を形成した振動子によって構成される。
The array transducer 1 has a first plurality of elements (ultrasonic transducers) arranged one-dimensionally or two-dimensionally. Each of these elements transmits an ultrasonic wave according to a drive signal supplied from the transmission circuit 2 and receives an ultrasonic echo from the subject to output a reception signal. Each element is, for example, a piezoelectric ceramic represented by PZT (lead zirconate titanate), a polymer piezoelectric element represented by PVDF (polyvinylidene fluoride), or PMN-PT (magnesium niobate / lead titanate solid solution). It is comprised by the vibrator | oscillator which formed the electrode in the both ends of the piezoelectric material which consists of a piezoelectric single crystal etc. which are represented by.
そのような振動子の電極に、パルス状又は連続波の電圧を印加すると、圧電体が伸縮し、それぞれの振動子からパルス状又は連続波の超音波が発生して、それらの超音波の合成により超音波ビームが形成される。また、それぞれの振動子は、伝搬する超音波を受信することにより伸縮して電気信号を発生し、それらの電気信号は、超音波の受信信号として出力される。
When a pulsed or continuous wave voltage is applied to the electrodes of such a vibrator, the piezoelectric body expands and contracts, and pulsed or continuous wave ultrasonic waves are generated from the respective vibrators, and the synthesis of those ultrasonic waves. As a result, an ultrasonic beam is formed. In addition, each transducer generates an electric signal by expanding and contracting by receiving propagating ultrasonic waves, and these electric signals are output as ultrasonic reception signals.
送信回路2は、例えば、複数のパルス発生器を含んでおり、制御部9からの制御信号に応じて選択された送信遅延パターンに基づいて、アレイトランスデューサ1の第1の複数の素子から送信される超音波が超音波ビームを形成するようにそれぞれの駆動信号の遅延量を調節して第1の複数の素子に供給する。
受信回路3は、図2に示されるように、増幅部12とAD(Analogue Digital)変換部13が直列接続された構成を有している。受信回路3は、アレイトランスデューサ1の各素子から出力される受信信号を増幅部12で増幅し、AD変換部13でデジタル化することにより得られた素子データを画像生成部4および素子データメモリ7に出力する。 Thetransmission circuit 2 includes, for example, a plurality of pulse generators, and is transmitted from the first plurality of elements of the array transducer 1 based on the transmission delay pattern selected according to the control signal from the control unit 9. The delay amount of each drive signal is adjusted so as to form an ultrasonic beam by the ultrasonic wave to be supplied to the first plurality of elements.
As shown in FIG. 2, thereception circuit 3 has a configuration in which an amplification unit 12 and an AD (Analogue Digital) conversion unit 13 are connected in series. The receiving circuit 3 amplifies the reception signal output from each element of the array transducer 1 by the amplifying unit 12, and digitizes the element data obtained by the AD converting unit 13. The image generating unit 4 and the element data memory 7 Output to.
受信回路3は、図2に示されるように、増幅部12とAD(Analogue Digital)変換部13が直列接続された構成を有している。受信回路3は、アレイトランスデューサ1の各素子から出力される受信信号を増幅部12で増幅し、AD変換部13でデジタル化することにより得られた素子データを画像生成部4および素子データメモリ7に出力する。 The
As shown in FIG. 2, the
画像生成部4は、図3に示されるように、信号処理部14とDSC(Digital Scan Converter)15と画像処理部16が順次直列に接続された構成を有している。
信号処理部14は、制御部9からの制御信号に応じて選択された受信遅延パターンに基づき、設定された音速に従い、各素子データにそれぞれの遅延を与えて加算(整相加算)することにより、受信フォーカス処理を行う。この受信フォーカス処理により、超音波エコーの焦点が絞り込まれた音線信号が生成される。さらに、信号処理部14は、音線信号に対し、超音波の反射位置の深度に応じて距離による減衰の補正を施した後、包絡線検波処理を施すことにより、被検体内の組織に関する断層画像情報であるBモード(Brightness Mode)画像信号を生成する。 As shown in FIG. 3, theimage generation unit 4 has a configuration in which a signal processing unit 14, a DSC (Digital Scan Converter) 15, and an image processing unit 16 are sequentially connected in series.
Based on the reception delay pattern selected according to the control signal from thecontrol unit 9, the signal processing unit 14 gives each element data a respective delay and adds (phased addition) according to the set sound speed. Receive focus processing. By this reception focus processing, a sound ray signal in which the focus of the ultrasonic echo is narrowed is generated. Further, the signal processing unit 14 corrects the attenuation by the distance according to the depth of the reflection position of the ultrasonic wave on the sound ray signal, and then performs envelope detection processing to thereby obtain a tomography relating to the tissue in the subject. A B mode (Brightness Mode) image signal which is image information is generated.
信号処理部14は、制御部9からの制御信号に応じて選択された受信遅延パターンに基づき、設定された音速に従い、各素子データにそれぞれの遅延を与えて加算(整相加算)することにより、受信フォーカス処理を行う。この受信フォーカス処理により、超音波エコーの焦点が絞り込まれた音線信号が生成される。さらに、信号処理部14は、音線信号に対し、超音波の反射位置の深度に応じて距離による減衰の補正を施した後、包絡線検波処理を施すことにより、被検体内の組織に関する断層画像情報であるBモード(Brightness Mode)画像信号を生成する。 As shown in FIG. 3, the
Based on the reception delay pattern selected according to the control signal from the
DSC15は、信号処理部14により生成されたBモード画像信号を通常のテレビジョン信号の走査方式に従う画像信号に変換(ラスター変換)する。
画像処理部16は、DSC15から入力されるBモード画像信号に階調処理等の各種の必要な画像処理を施した後、Bモード画像信号を表示制御部5に出力する。 TheDSC 15 converts (raster conversion) the B-mode image signal generated by the signal processing unit 14 into an image signal according to a normal television signal scanning method.
Theimage processing unit 16 performs various necessary image processing such as gradation processing on the B-mode image signal input from the DSC 15, and then outputs the B-mode image signal to the display control unit 5.
画像処理部16は、DSC15から入力されるBモード画像信号に階調処理等の各種の必要な画像処理を施した後、Bモード画像信号を表示制御部5に出力する。 The
The
表示制御部5は、画像生成部4から出力されたBモード画像信号に基づいて、表示部6に超音波診断画像を表示させる。
表示部6は、例えば、LCD(Liquid Crystal Display)等のディスプレイ装置を含んでおり、表示制御部5の制御の下で、超音波診断画像を表示する。 The display control unit 5 displays an ultrasound diagnostic image on the display unit 6 based on the B-mode image signal output from theimage generation unit 4.
The display unit 6 includes a display device such as an LCD (Liquid Crystal Display), for example, and displays an ultrasound diagnostic image under the control of the display control unit 5.
表示部6は、例えば、LCD(Liquid Crystal Display)等のディスプレイ装置を含んでおり、表示制御部5の制御の下で、超音波診断画像を表示する。 The display control unit 5 displays an ultrasound diagnostic image on the display unit 6 based on the B-mode image signal output from the
The display unit 6 includes a display device such as an LCD (Liquid Crystal Display), for example, and displays an ultrasound diagnostic image under the control of the display control unit 5.
素子データメモリ7は、受信回路3から出力される素子データを順次格納する。
音速定量化部8は、素子データメモリ7に格納されている素子データを用いて、アレイトランスデューサ1により撮像される撮像領域全体の音速を示す全体音速V1と、撮像領域内の病変部を含む外れ領域の音速を示す局所音速V2をそれぞれ定量化し、画像生成部4に出力する。音速定量化部8は、図4に示されるように、時間差算出部21と音速算出部22とを有しており、音速算出部22に全体音速決定部23、外れ領域特定部24および局所音速決定部25がそれぞれ接続されている。さらに、全体音速決定部23と外れ領域特定部24と局所音速決定部25が順次直列に接続されている。 Theelement data memory 7 sequentially stores element data output from the receiving circuit 3.
The soundvelocity quantifying unit 8 uses the element data stored in the element data memory 7 to remove the entire sound velocity V1 indicating the sound velocity of the entire imaging area imaged by the array transducer 1 and the lesion in the imaging area. The local sound speed V2 indicating the sound speed of the region is quantified and output to the image generation unit 4. As shown in FIG. 4, the sound speed quantification unit 8 includes a time difference calculation unit 21 and a sound speed calculation unit 22, and the sound speed calculation unit 22 includes an overall sound speed determination unit 23, an outlier region specifying unit 24, and a local sound speed. Each determination unit 25 is connected. Furthermore, the overall sound speed determining unit 23, the off-region specifying unit 24, and the local sound speed determining unit 25 are sequentially connected in series.
音速定量化部8は、素子データメモリ7に格納されている素子データを用いて、アレイトランスデューサ1により撮像される撮像領域全体の音速を示す全体音速V1と、撮像領域内の病変部を含む外れ領域の音速を示す局所音速V2をそれぞれ定量化し、画像生成部4に出力する。音速定量化部8は、図4に示されるように、時間差算出部21と音速算出部22とを有しており、音速算出部22に全体音速決定部23、外れ領域特定部24および局所音速決定部25がそれぞれ接続されている。さらに、全体音速決定部23と外れ領域特定部24と局所音速決定部25が順次直列に接続されている。 The
The sound
制御部9は、ユーザにより操作部10から入力された指令に基づいて超音波診断装置各部の制御を行う。
操作部10は、ユーザが入力操作を行うためのもので、キーボード、マウス、トラックボール、タッチパネル等から形成することができる。
格納部11は、動作プログラム等を格納するもので、ハードディスク、フレキシブルディスク、MO(Magneto-Optical Disk)、MT(Magnetic Tape)、RAM(Random Access Memory)、CD-ROM(Compact Disk Read Only Memory)、DVD-ROM(Digital Versatile Disk Read Only Memory)、SDカード(Secure Digital Card)、CFカード(Compact Flash Card)、USBメモリ(Universal Serial Bus Memory)等の記録メディア、またはサーバ等を用いることができる。
なお、画像生成部4、表示制御部5、音速定量化部8および制御部9は、CPU(CenTsal Processing Unit)と、CPUに各種の処理を行わせるための動作プログラムから構成されるが、それらをデジタル回路で構成してもよい。また、これら画像生成部4、表示制御部5、音速定量化部8および制御部9を、部分的にあるいは全体的に1つのCPUに統合させて構成することもできる。 Thecontrol unit 9 controls each unit of the ultrasonic diagnostic apparatus based on a command input from the operation unit 10 by the user.
Theoperation unit 10 is for a user to perform an input operation, and can be formed from a keyboard, a mouse, a trackball, a touch panel, or the like.
Thestorage unit 11 stores an operation program and the like. A hard disk, a flexible disk, an MO (Magneto-Optical Disk), an MT (Magnetic Tape), a RAM (Random Access Memory), a CD-ROM (Compact Disk Read Only Memory). Recording media such as DVD-ROM (Digital Versatile Disk Read Only Memory), SD card (Secure Digital Card), CF card (Compact Flash Card), USB memory (Universal Serial Bus Memory), or server can be used. .
Theimage generation unit 4, the display control unit 5, the sound speed quantification unit 8, and the control unit 9 are composed of a CPU (CenTsal Processing Unit) and an operation program for causing the CPU to perform various processes. May be constituted by a digital circuit. Further, the image generation unit 4, the display control unit 5, the sound speed quantification unit 8, and the control unit 9 can be partially or entirely integrated into one CPU.
操作部10は、ユーザが入力操作を行うためのもので、キーボード、マウス、トラックボール、タッチパネル等から形成することができる。
格納部11は、動作プログラム等を格納するもので、ハードディスク、フレキシブルディスク、MO(Magneto-Optical Disk)、MT(Magnetic Tape)、RAM(Random Access Memory)、CD-ROM(Compact Disk Read Only Memory)、DVD-ROM(Digital Versatile Disk Read Only Memory)、SDカード(Secure Digital Card)、CFカード(Compact Flash Card)、USBメモリ(Universal Serial Bus Memory)等の記録メディア、またはサーバ等を用いることができる。
なお、画像生成部4、表示制御部5、音速定量化部8および制御部9は、CPU(CenTsal Processing Unit)と、CPUに各種の処理を行わせるための動作プログラムから構成されるが、それらをデジタル回路で構成してもよい。また、これら画像生成部4、表示制御部5、音速定量化部8および制御部9を、部分的にあるいは全体的に1つのCPUに統合させて構成することもできる。 The
The
The
The
ここで、音速定量化部8の作用について詳細に説明する。
時間差算出部21は、素子データメモリ7に格納されている素子データの中から、アレイトランスデューサ1の第1の複数の素子から被検体内の反射点に向けて送信された超音波に対応して、反射点により反射される超音波エコーを受信したアレイトランスデューサ1の第1の複数の素子から出力された素子データを読み出す。そして、アレイトランスデューサ1の第1の複数の素子のうちの1つの素子を参考用素子に、参考用素子ではない残りの素子を測定用素子に設定し、参考用素子に対応する素子データと、それぞれの測定用素子に対応する素子データとを比較することにより、参考用素子の素子データとそれぞれの測定用素子の素子データとの間の複数の時間差を算出する。 Here, the operation of the soundvelocity quantification unit 8 will be described in detail.
The timedifference calculation unit 21 corresponds to the ultrasonic wave transmitted from the first plurality of elements of the array transducer 1 toward the reflection point in the subject from among the element data stored in the element data memory 7. The element data output from the first plurality of elements of the array transducer 1 that has received the ultrasonic echo reflected by the reflection point is read out. Then, one of the first plurality of elements of the array transducer 1 is set as a reference element, the remaining elements that are not reference elements are set as measurement elements, element data corresponding to the reference elements, By comparing the element data corresponding to each measurement element, a plurality of time differences between the element data of the reference element and the element data of each measurement element are calculated.
時間差算出部21は、素子データメモリ7に格納されている素子データの中から、アレイトランスデューサ1の第1の複数の素子から被検体内の反射点に向けて送信された超音波に対応して、反射点により反射される超音波エコーを受信したアレイトランスデューサ1の第1の複数の素子から出力された素子データを読み出す。そして、アレイトランスデューサ1の第1の複数の素子のうちの1つの素子を参考用素子に、参考用素子ではない残りの素子を測定用素子に設定し、参考用素子に対応する素子データと、それぞれの測定用素子に対応する素子データとを比較することにより、参考用素子の素子データとそれぞれの測定用素子の素子データとの間の複数の時間差を算出する。 Here, the operation of the sound
The time
例えば、図5に示されるように、nを2以上の整数とし、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aを焦点として超音波ビームを送信し、反射点Aにより反射された超音波エコーを第1の複数の素子E1~Enで受信するものとする。反射点Aから超音波エコーが発せられた時点を原点として、それぞれの素子により反射点Aからの超音波エコーを受信する時刻は、反射点Aとそれぞれの素子との間の距離に応じたものとなる。図6に示されるように、第1の複数の素子E1~Enのうち、反射点Aからの距離が最も短い素子Ecにおいて最も早く超音波エコーを受信し、素子Ecから離れた位置に配置されている素子ほど、反射点Aからの距離が大きくなるため、超音波エコーは遅れて受信される。
For example, as shown in FIG. 5, n is an integer of 2 or more, and an ultrasonic beam is transmitted from the first plurality of elements E1 to En of the array transducer 1 with the reflection point A in the subject as a focal point, and reflected. It is assumed that the ultrasonic echo reflected by the point A is received by the first plurality of elements E1 to En. The time at which the ultrasonic echo from the reflection point A is received by each element with the point in time when the ultrasonic echo is emitted from the reflection point A as a function of the distance between the reflection point A and each element. It becomes. As shown in FIG. 6, among the first plurality of elements E1 to En, the element Ec having the shortest distance from the reflection point A receives the earliest ultrasonic echo and is arranged at a position away from the element Ec. Since the distance from the reflection point A becomes larger as the element is located, the ultrasonic echo is received later.
図5に示されるように、超音波エコーの経路上に病変部Bが存在し、病変部Bにおける音速が周辺の音速よりも高い場合には、病変部Bを通過してきた超音波エコーは、音速が高い領域を通過した分だけ、対応する素子で受信される時刻が早くなる。図6に示した各素子に向かう超音波エコーの最も振幅が大きいところをその超音波エコーの代表点として表すと、図7のようになる。図7に示されるように、病変部Bを通過し、素子Esと素子Etで受信された超音波エコーは、反射点と各素子の各々との幾何学的な位置関係を考慮しても、それ以外の素子で受信された超音波エコーに比べて、到達時刻がずれていることがわかる。ここで、sおよびtは、1~nの範囲内の整数を示している。
As shown in FIG. 5, when the lesioned part B exists on the path of the ultrasound echo and the sound speed at the lesioned part B is higher than the surrounding sound speed, the ultrasound echo that has passed through the lesioned part B is The time received by the corresponding element is advanced by the amount that has passed through the high sound velocity region. FIG. 7 shows a representative point of the ultrasonic echo where the maximum amplitude of the ultrasonic echo directed to each element shown in FIG. 6 is represented. As shown in FIG. 7, the ultrasonic echoes that have passed through the lesion B and received by the element Es and the element Et are considered even if the geometrical positional relationship between the reflection point and each element is considered. It can be seen that the arrival time is deviated from the ultrasonic echoes received by other elements. Here, s and t are integers in the range of 1 to n.
そこで、図8に示されるように、iを任意の1~nの範囲内の整数として、第1の複数の素子Ei~Enと反射点Aとの間の全体領域R1に病変部が存在しない場合、反射点Aから超音波エコーが発せられた時点を原点として素子Eiが反射点Aからの超音波エコーを受信する時刻Tiを記録することで、図9に示されるようなそれぞれの素子が超音波エコーを受信した時刻を表すグラフが得られる。具体的には、第1の複数の素子E1~Enに対応する素子データの振幅情報に基づいて、それぞれの素子が超音波エコーを受信した時刻を求めることができる。あるいは、第1の複数の素子E1~Enに対応する素子データの波形と、予め記憶されたそれぞれの素子が超音波エコーを受信する際の素子データの波形とを、パターンマッチング法等の既知の方法で比較し、それぞれの素子が超音波エコーを受信した時刻を求めることもできる。
Therefore, as shown in FIG. 8, there is no lesion in the entire region R1 between the first plurality of elements Ei to En and the reflection point A, where i is an integer within an arbitrary range of 1 to n. In this case, by recording the time Ti at which the element Ei receives the ultrasonic echo from the reflection point A with the point in time when the ultrasonic echo is emitted from the reflection point A, each element as shown in FIG. A graph representing the time when the ultrasonic echo is received is obtained. Specifically, based on the amplitude information of the element data corresponding to the first plurality of elements E1 to En, the time at which each element receives the ultrasonic echo can be obtained. Alternatively, the waveform of the element data corresponding to the first plurality of elements E1 to En and the waveform of the element data when each of the previously stored elements receives an ultrasonic echo are known patterns such as a pattern matching method. The time at which each element receives the ultrasonic echo can also be obtained by comparison using a method.
また、kを任意の1~nの範囲内の整数とすると、素子Ekが超音波エコーを受信した時刻Tkと、素子Eiが超音波エコーを受信した時刻Tiにより、素子Ekの素子データと素子Eiの素子データとの時間差△Tは、△T=Ti-Tkとなる。このように、素子Eiおよび素子Ekが超音波エコーを受信した時刻に基づいて、時間差△Tが算出される。
Further, if k is an integer in an arbitrary range of 1 to n, the element data and the element data of the element Ek are determined by the time Tk when the element Ek receives the ultrasonic echo and the time Ti when the element Ei receives the ultrasonic echo. The time difference ΔT from the element data of Ei is ΔT = Ti−Tk. In this way, the time difference ΔT is calculated based on the time at which the element Ei and the element Ek receive the ultrasonic echo.
ここで、被検体内の反射点Aとそれぞれの素子との間の領域に対応する音速を、個別音速とする。音速算出部22は、時間差算出部21により算出された時間差△T、並びに、反射点Aから素子EiおよびEkまでの距離に基づいて、全体領域R1内の個別音速Vaを算出する。図8に示されるように、素子Ekから反射点Aまでの距離をLk、素子Eiから反射点Aまでの距離をLiとすると、算出された時間差△Tに基づき、素子Eiおよび素子Ekに対応する個別音速Vaは、Va=(Li-Lk)/(Ti-Tk)となる。このように、素子Eiおよび素子Ekの2つの素子を用いることで、個別音速Vaを算出することができる。
Here, the sound speed corresponding to the area between the reflection point A in the subject and each element is the individual sound speed. The sound speed calculation unit 22 calculates the individual sound speed Va in the entire region R1 based on the time difference ΔT calculated by the time difference calculation unit 21 and the distances from the reflection point A to the elements Ei and Ek. As shown in FIG. 8, when the distance from the element Ek to the reflection point A is Lk and the distance from the element Ei to the reflection point A is Li, it corresponds to the element Ei and the element Ek based on the calculated time difference ΔT. The individual sound velocity Va is Va = (Li−Lk) / (Ti−Tk). Thus, the individual sound velocity Va can be calculated by using the two elements of the element Ei and the element Ek.
時間差算出部21が、第1の複数の素子E1~Enのうち1つの素子を参考用素子に、残りの参考用素子以外の複数の素子を測定用素子に設定すると、参考用素子が超音波エコーを受信した時刻と、複数の測定用素子が超音波エコーを受信した時刻を比較することで、複数の時間差△Tが算出される。算出された複数の時間差△T、並びに、反射点Aと第1の複数の素子E1~Enの幾何学的配置に基づき、音速算出部22により、全体領域R1に対応する複数の個別音速Vaが算出される。
When the time difference calculation unit 21 sets one of the first plurality of elements E1 to En as a reference element and a plurality of elements other than the remaining reference elements as measurement elements, the reference element is ultrasonic. A plurality of time differences ΔT are calculated by comparing the time when the echo is received and the time when the plurality of measuring elements receive the ultrasonic echo. Based on the calculated plurality of time differences ΔT and the geometrical arrangement of the reflection point A and the first plurality of elements E1 to En, the sound speed calculation unit 22 generates a plurality of individual sound speeds Va corresponding to the entire region R1. Calculated.
このように算出された複数の個別音速Vaに基づいて、全体音速決定部23は、第1の複数の素子E1~Enと反射点Aとの間の全体領域R1に対応する全体音速V1を決定する。例えば、音速算出部22により算出された複数の個別音速Vaのヒストグラムを作成し、最も頻度が高い個別音速Vaを全体音速V1に決定することができる。
なお、参考用素子に対応する個別音速Vaは、前述した方法で算出することはできないが、参考用素子の周囲の測定用素子に対応する個別音速Vaを用いて補間することで求めることができる。 Based on the plurality of individual sound speeds Va thus calculated, the total soundspeed determination unit 23 determines the total sound speed V1 corresponding to the entire region R1 between the first plurality of elements E1 to En and the reflection point A. To do. For example, a histogram of a plurality of individual sound speeds Va calculated by the sound speed calculation unit 22 can be created, and the individual sound speed Va having the highest frequency can be determined as the overall sound speed V1.
Note that the individual sound velocity Va corresponding to the reference element cannot be calculated by the above-described method, but can be obtained by interpolation using the individual sound speed Va corresponding to the measurement elements around the reference element. .
なお、参考用素子に対応する個別音速Vaは、前述した方法で算出することはできないが、参考用素子の周囲の測定用素子に対応する個別音速Vaを用いて補間することで求めることができる。 Based on the plurality of individual sound speeds Va thus calculated, the total sound
Note that the individual sound velocity Va corresponding to the reference element cannot be calculated by the above-described method, but can be obtained by interpolation using the individual sound speed Va corresponding to the measurement elements around the reference element. .
一方、第1の複数の素子E1~Enと反射点Aとの間の領域に病変部が存在する場合、反射点Aと第1の複数の素子E1~Enの幾何学的配置並びにそれぞれの測定用素子に対応する時間差△Tに基づき、音速算出部22が複数の測定用素子に対応する複数の個別音速Vaを算出すると、図10に示されるグラフが得られる。
図10に示されるように、超音波エコーが病変部を通過して素子Esおよび素子Etに向かう場合、素子Esおよび素子Etに対応する個別音速Vaは、素子Esおよび素子Et以外の素子に対応する個別音速Vaよりも高い値を有している。これは、図7に示したように、素子Esおよび素子Etに向かう超音波エコーが、周辺の音速よりも高い音速を有する病変部Bを通過したためと考えられる。 On the other hand, when a lesion is present in the region between the first plurality of elements E1 to En and the reflection point A, the geometric arrangement of the reflection point A and the first plurality of elements E1 to En and the respective measurements are performed. When the soundspeed calculation unit 22 calculates a plurality of individual sound velocities Va corresponding to a plurality of measurement elements based on the time difference ΔT corresponding to the element for use, the graph shown in FIG. 10 is obtained.
As shown in FIG. 10, when the ultrasonic echo passes through the lesion and travels toward the element Es and the element Et, the individual sound velocity Va corresponding to the element Es and the element Et corresponds to an element other than the element Es and the element Et. It has a higher value than the individual sound velocity Va. This is presumably because the ultrasonic echo directed toward the element Es and the element Et passed through the lesioned part B having a higher sound speed than the surrounding sound speed, as shown in FIG.
図10に示されるように、超音波エコーが病変部を通過して素子Esおよび素子Etに向かう場合、素子Esおよび素子Etに対応する個別音速Vaは、素子Esおよび素子Et以外の素子に対応する個別音速Vaよりも高い値を有している。これは、図7に示したように、素子Esおよび素子Etに向かう超音波エコーが、周辺の音速よりも高い音速を有する病変部Bを通過したためと考えられる。 On the other hand, when a lesion is present in the region between the first plurality of elements E1 to En and the reflection point A, the geometric arrangement of the reflection point A and the first plurality of elements E1 to En and the respective measurements are performed. When the sound
As shown in FIG. 10, when the ultrasonic echo passes through the lesion and travels toward the element Es and the element Et, the individual sound velocity Va corresponding to the element Es and the element Et corresponds to an element other than the element Es and the element Et. It has a higher value than the individual sound velocity Va. This is presumably because the ultrasonic echo directed toward the element Es and the element Et passed through the lesioned part B having a higher sound speed than the surrounding sound speed, as shown in FIG.
このように算出された複数の個別音速Vaに基づいて、全体音速決定部23が複数の個別音速Vaのヒストグラムを作成し、最も頻度が高い個別音速Vaを全体音速V1に決定する。
外れ領域特定部24は、全体音速決定部23が決定した全体音速V1と音速算出部22が算出した個別音速Vaの差分△Dの絶対値が、速度しきい値Thvを超えるか否かを判定する。すなわち、図10に示される第1の複数の素子E1~Enに対応する複数の個別音速Vaと全体音速V1の差分△Dをそれぞれ算出し、それぞれの差分△Dの絶対値と速度しきい値Thvを比較する。図10に示される素子EsおよびEtに対応する個別音速Vaと全体音速V1の差分△Dの絶対値が速度しきい値Thvを超えていると、図11に示されるように、この差分△Dに対応する素子Esおよび素子Etと反射点Aとの間の領域を外れ領域R2と特定する。
なお、速度しきい値Thvは、正常な組織と病変組織との間で想定される音速差、あるいは、この超音波診断装置における音速値算出の分解能等により決定され、50m/sec以下が望ましく、30m/sec以下がさらに望ましく、10m/sec程度が最も望ましい。 Based on the plurality of individual sound speeds Va calculated in this way, the overall soundspeed determination unit 23 creates a histogram of the plurality of individual sound speeds Va, and determines the most frequent individual sound speed Va as the total sound speed V1.
Theoutlier specifying unit 24 determines whether or not the absolute value of the difference ΔD between the total sound speed V1 determined by the total sound speed determination unit 23 and the individual sound speed Va calculated by the sound speed calculation unit 22 exceeds the speed threshold Thv. To do. That is, the difference ΔD between the plurality of individual sound velocities Va and the total sound speed V1 corresponding to the first plurality of elements E1 to En shown in FIG. 10 is calculated, respectively, and the absolute value and speed threshold value of each difference ΔD are calculated. Compare Thv. If the absolute value of the difference ΔD between the individual sound speed Va and the overall sound speed V1 corresponding to the elements Es and Et shown in FIG. 10 exceeds the speed threshold value Thv, as shown in FIG. The area between the element Es and the element Et corresponding to the reflection point A and the reflection point A is specified as the out-of-range area R2.
The speed threshold Thv is determined by the difference in sound speed assumed between the normal tissue and the diseased tissue, or the resolution of sound speed value calculation in this ultrasonic diagnostic apparatus, and is preferably 50 m / sec or less. 30 m / sec or less is more desirable, and about 10 m / sec is most desirable.
外れ領域特定部24は、全体音速決定部23が決定した全体音速V1と音速算出部22が算出した個別音速Vaの差分△Dの絶対値が、速度しきい値Thvを超えるか否かを判定する。すなわち、図10に示される第1の複数の素子E1~Enに対応する複数の個別音速Vaと全体音速V1の差分△Dをそれぞれ算出し、それぞれの差分△Dの絶対値と速度しきい値Thvを比較する。図10に示される素子EsおよびEtに対応する個別音速Vaと全体音速V1の差分△Dの絶対値が速度しきい値Thvを超えていると、図11に示されるように、この差分△Dに対応する素子Esおよび素子Etと反射点Aとの間の領域を外れ領域R2と特定する。
なお、速度しきい値Thvは、正常な組織と病変組織との間で想定される音速差、あるいは、この超音波診断装置における音速値算出の分解能等により決定され、50m/sec以下が望ましく、30m/sec以下がさらに望ましく、10m/sec程度が最も望ましい。 Based on the plurality of individual sound speeds Va calculated in this way, the overall sound
The
The speed threshold Thv is determined by the difference in sound speed assumed between the normal tissue and the diseased tissue, or the resolution of sound speed value calculation in this ultrasonic diagnostic apparatus, and is preferably 50 m / sec or less. 30 m / sec or less is more desirable, and about 10 m / sec is most desirable.
次に、音速算出部22は、外れ領域R2を通る超音波エコーを受信した素子EsおよびEtを用い、外れ領域R2内の個別音速Vbを算出する。
図11に示されるように、第1の複数の素子E1~Enと反射点Aとの間に病変部Bが存在すると、反射点Aからの超音波エコーを受信する時刻を記録することで、図12に示されるようなそれぞれの素子が超音波エコーを受信した時刻を表すグラフが得られる。時間差算出部21により、図12に示される素子Esおよび素子Etが超音波エコーを受信する時刻Tsおよび時刻Ttに基づき、素子Esに対応する素子データと素子Etに対応する素子データとの間の時間差△Tが算出される。
そして、音速算出部22は、図11に示されるように、反射点Aから素子Esまでの距離をLs、反射点Aから素子Etまでの距離をLtとし、素子Esおよび素子Etに対応する個別音速Vbを、Vb=(Lt-Ls)/(Tt-Ts)として算出する。 Next, the soundvelocity calculation unit 22 calculates the individual sound velocity Vb in the deviating region R2 using the elements Es and Et that have received the ultrasonic echoes passing through the deviating region R2.
As shown in FIG. 11, when a lesion B exists between the first plurality of elements E1 to En and the reflection point A, the time when the ultrasonic echo from the reflection point A is received is recorded. A graph representing the time at which each element receives the ultrasonic echo as shown in FIG. 12 is obtained. Based on the time Ts and the time Tt at which the element Es and the element Et shown in FIG. 12 receive the ultrasonic echoes, the timedifference calculation unit 21 generates a difference between the element data corresponding to the element Es and the element data corresponding to the element Et. A time difference ΔT is calculated.
Then, as shown in FIG. 11, the soundvelocity calculation unit 22 sets the distance from the reflection point A to the element Es as Ls, and sets the distance from the reflection point A to the element Et as Lt, and individually corresponds to the element Es and the element Et. The speed of sound Vb is calculated as Vb = (Lt−Ls) / (Tt−Ts).
図11に示されるように、第1の複数の素子E1~Enと反射点Aとの間に病変部Bが存在すると、反射点Aからの超音波エコーを受信する時刻を記録することで、図12に示されるようなそれぞれの素子が超音波エコーを受信した時刻を表すグラフが得られる。時間差算出部21により、図12に示される素子Esおよび素子Etが超音波エコーを受信する時刻Tsおよび時刻Ttに基づき、素子Esに対応する素子データと素子Etに対応する素子データとの間の時間差△Tが算出される。
そして、音速算出部22は、図11に示されるように、反射点Aから素子Esまでの距離をLs、反射点Aから素子Etまでの距離をLtとし、素子Esおよび素子Etに対応する個別音速Vbを、Vb=(Lt-Ls)/(Tt-Ts)として算出する。 Next, the sound
As shown in FIG. 11, when a lesion B exists between the first plurality of elements E1 to En and the reflection point A, the time when the ultrasonic echo from the reflection point A is received is recorded. A graph representing the time at which each element receives the ultrasonic echo as shown in FIG. 12 is obtained. Based on the time Ts and the time Tt at which the element Es and the element Et shown in FIG. 12 receive the ultrasonic echoes, the time
Then, as shown in FIG. 11, the sound
ここで、時間差算出部21が外れ領域R2を通過した超音波エコーを受信した複数の素子のうちの1つを参考用素子に、参考用素子以外の素子を複数の測定用素子に設定すると、参考用素子が外れ領域R2を通過した超音波エコーを受信した時刻と、複数の測定用素子が病変部Bを通過した超音波エコーを受信した時刻により、複数の時間差△Tが算出される。算出された複数の時間差△T、並びに、反射点Aと外れ領域R2を通過した超音波エコーを受信する複数の素子の幾何学的配置に基づき、音速算出部22により、外れ領域R2に対応する複数の個別音速Vbが算出される。
Here, when the time difference calculation unit 21 sets one of the plurality of elements that have received the ultrasonic echoes that have passed through the out-of-range region R2 as a reference element, and other than the reference element as a plurality of measurement elements, A plurality of time differences ΔT are calculated based on the time at which the reference element receives the ultrasonic echo that has passed through the out-of-range region R2 and the time at which the plurality of measurement elements have received the ultrasonic echo that has passed through the lesioned part B. Based on the calculated plurality of time differences ΔT and the geometrical arrangement of the plurality of elements that receive the ultrasonic echoes that have passed through the reflection point A and the detachment region R2, the sound velocity calculation unit 22 corresponds to the detachment region R2. A plurality of individual sound speeds Vb are calculated.
このように算出された複数の個別音速Vbに基づいて、局所音速決定部25によりヒストグラムが作成され、最も頻度が高い個別音速Vbが外れ領域R2の局所音速V2として決定される。
なお、病変部Bを通過する超音波エコーを受信する素子が2つだけである場合、個別音速Vbが1つだけ算出されるが、局所音速決定部25は、この個別音速Vbを局所音速V2として決定することができる。 A histogram is created by the local soundspeed determination unit 25 based on the plurality of individual sound speeds Vb calculated in this way, and the individual sound speed Vb having the highest frequency is determined as the local sound speed V2 of the out-of-range region R2.
Note that, when there are only two elements that receive ultrasonic echoes that pass through the lesion B, only one individual sound velocity Vb is calculated. The local soundspeed determination unit 25 uses the individual sound speed Vb as the local sound velocity V2. Can be determined as
なお、病変部Bを通過する超音波エコーを受信する素子が2つだけである場合、個別音速Vbが1つだけ算出されるが、局所音速決定部25は、この個別音速Vbを局所音速V2として決定することができる。 A histogram is created by the local sound
Note that, when there are only two elements that receive ultrasonic echoes that pass through the lesion B, only one individual sound velocity Vb is calculated. The local sound
次に、図13のフローチャートを参照して実施の形態1の動作について説明する。
まず、ステップS1で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aに向けて1回だけ超音波の送受信が行われ、ステップS2で、素子データが取得される。すなわち、送信回路2から供給される駆動信号に従って第1の複数の素子E1~Enから反射点Aに向けて超音波が送信され、反射点Aからの超音波エコーを受信した素子E1~Enから受信信号が受信回路3に出力され、受信回路3で素子データが生成されて、順次、素子データメモリ7に格納される。 Next, the operation of the first embodiment will be described with reference to the flowchart of FIG.
First, in step S1, ultrasonic waves are transmitted and received only once from the first plurality of elements E1 to En of thearray transducer 1 toward the reflection point A in the subject, and element data is acquired in step S2. The That is, ultrasonic waves are transmitted from the first plurality of elements E1 to En to the reflection point A according to the drive signal supplied from the transmission circuit 2, and from the elements E1 to En that have received the ultrasonic echoes from the reflection point A. A reception signal is output to the reception circuit 3, element data is generated by the reception circuit 3, and sequentially stored in the element data memory 7.
まず、ステップS1で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aに向けて1回だけ超音波の送受信が行われ、ステップS2で、素子データが取得される。すなわち、送信回路2から供給される駆動信号に従って第1の複数の素子E1~Enから反射点Aに向けて超音波が送信され、反射点Aからの超音波エコーを受信した素子E1~Enから受信信号が受信回路3に出力され、受信回路3で素子データが生成されて、順次、素子データメモリ7に格納される。 Next, the operation of the first embodiment will be described with reference to the flowchart of FIG.
First, in step S1, ultrasonic waves are transmitted and received only once from the first plurality of elements E1 to En of the
次に、ステップS3で、時間差算出部21により参考用素子に対応する素子データとそれぞれの測定用素子に対応する素子データの間の比較が行われ、参考用素子の素子データとそれぞれの測定用素子の素子データとの間の時間差△Tが算出される。さらに、ステップS4で、アレイトランスデューサ1の複数の測定用素子の幾何学的配置並びに時間差△Tに基づき、音速算出部22により複数の測定用素子に対応する複数の個別音速Vaが算出される。このように算出された複数の個別音速Vaに基づいて、ステップS5で、全体音速決定部23により全体音速V1が決定される。
Next, in step S3, the time difference calculation unit 21 compares the element data corresponding to the reference element and the element data corresponding to each measurement element, and the element data of the reference element and each measurement data are measured. A time difference ΔT between the element data and the element data is calculated. Further, in step S4, based on the geometric arrangement of the plurality of measurement elements of the array transducer 1 and the time difference ΔT, the sound speed calculation unit 22 calculates a plurality of individual sound velocities Va corresponding to the plurality of measurement elements. Based on the plurality of individual sound speeds Va calculated in this way, the overall sound speed V1 is determined by the overall sound speed determination unit 23 in step S5.
その後、ステップS6で、外れ領域特定部24により外れ領域R2が存在するか否かが判定され、外れ領域R2が特定されると、ステップS7で、外れ領域R2における少なくとも1つの個別音速Vbが算出され、さらに、ステップS8で、局所音速決定部25により外れ領域R2における局所音速V2が決定される。
なお、ステップS4で算出したそれぞれの個別音速Vaと全体音速V1のそれぞれの差分△Dの絶対値が速度しきい値Thv以下であるために、ステップS6で、外れ領域特定部24により外れ領域R2が特定されなかった場合は、ステップS9に進み、外れ領域R2が存在しない旨のエラー表示がなされる。 Thereafter, in step S6, it is determined whether or not the out-of-region R2 exists by the out-of-region specifying unit 24. When the out-of-region R2 is specified, in step S7, at least one individual sound velocity Vb in the out-of-region R2 is calculated. In step S8, the local sound speed determination unit 25 determines the local sound speed V2 in the out-of-range region R2.
Note that since the absolute value of the difference ΔD between each individual sound velocity Va calculated in step S4 and the total sound velocity V1 is equal to or less than the speed threshold value Thv, the deviating region R2 is detected by the deviatingregion specifying unit 24 in step S6. Is not specified, the process proceeds to step S9, and an error display indicating that the out-of-range region R2 does not exist is displayed.
なお、ステップS4で算出したそれぞれの個別音速Vaと全体音速V1のそれぞれの差分△Dの絶対値が速度しきい値Thv以下であるために、ステップS6で、外れ領域特定部24により外れ領域R2が特定されなかった場合は、ステップS9に進み、外れ領域R2が存在しない旨のエラー表示がなされる。 Thereafter, in step S6, it is determined whether or not the out-of-region R2 exists by the out-of-
Note that since the absolute value of the difference ΔD between each individual sound velocity Va calculated in step S4 and the total sound velocity V1 is equal to or less than the speed threshold value Thv, the deviating region R2 is detected by the deviating
また、アレイトランスデューサ1の第1の複数の素子E1~Enから超音波ビームの走査を行うことで受信回路3により生成された素子データに基づいて、画像生成部4によりBモード画像信号が生成され、このBモード画像信号が表示制御部5に出力され、超音波画像が表示部6に表示される。
音速定量化部8により決定された全体音速V1および局所音速V2は画像生成部4に出力され、超音波画像と共に全体音速V1および局所音速V2の値が表示部6に表示される。全体音速V1および局所音速V2の双方でなく、局所音速V2の値のみを表示してもよい。局所的に音速が異なる領域がないと判定されてステップS9でエラー表示をする場合には、全体音速V1のみを表示することもできる。 Further, a B-mode image signal is generated by theimage generator 4 based on the element data generated by the receiving circuit 3 by scanning the ultrasonic beam from the first plurality of elements E1 to En of the array transducer 1. The B-mode image signal is output to the display control unit 5 and the ultrasonic image is displayed on the display unit 6.
The total sound speed V1 and the local sound speed V2 determined by the soundspeed quantification unit 8 are output to the image generation unit 4, and the values of the total sound speed V1 and the local sound speed V2 are displayed on the display unit 6 together with the ultrasonic image. Only the value of the local sound speed V2 may be displayed instead of both the overall sound speed V1 and the local sound speed V2. When it is determined that there is no region where the sound speed is locally different and error display is performed in step S9, only the entire sound speed V1 can be displayed.
音速定量化部8により決定された全体音速V1および局所音速V2は画像生成部4に出力され、超音波画像と共に全体音速V1および局所音速V2の値が表示部6に表示される。全体音速V1および局所音速V2の双方でなく、局所音速V2の値のみを表示してもよい。局所的に音速が異なる領域がないと判定されてステップS9でエラー表示をする場合には、全体音速V1のみを表示することもできる。 Further, a B-mode image signal is generated by the
The total sound speed V1 and the local sound speed V2 determined by the sound
さらに、音速定量化部8から出力された全体音速V1および局所音速V2に基づき、画像生成部4が、外れ領域R2を除く全体領域R1については全体音速V1を用いたBモード画像信号を生成し、外れ領域R2については局所音速V2を用いたBモード画像信号を生成することもできる。このようにすれば、外れ領域R2を除く全体領域R1においても、外れ領域R2においても、高品質の超音波画像を生成することが可能となる。
Further, based on the total sound speed V1 and the local sound speed V2 output from the sound speed quantification unit 8, the image generation unit 4 generates a B-mode image signal using the total sound speed V1 for the entire area R1 excluding the outlier area R2. For the out-of-range region R2, a B-mode image signal using the local sound velocity V2 can be generated. In this way, it is possible to generate a high-quality ultrasonic image in the entire region R1 excluding the detachment region R2 and also in the detachment region R2.
なお、個別音速VaおよびVbは、任意の2つの素子、すなわち、参考用素子および測定用素子と被検体内の反射点Aとの距離、並びに、参考用素子に対応する素子データと測定用素子に対応する素子データを比較することで得られる時間差△Tに基づいて算出される。
このとき、参考用素子と測定用素子との間隔が狭く設定されると、時間差△Tが小さくなると共に音速を算出する範囲が狭くなり、個別音速VaおよびVbの算出の精度が向上する。一方、参考用素子と測定用素子との間隔が広く設定されると、音速を算出する範囲が広くなり、局所音速の空間的な分解能の低下を招くおそれがある。このため、参考用素子と測定用素子との間隔は、この超音波診断装置における時間分解能が時間差△Tを許容できる範囲で、可能な限り狭く設定されることが望ましい。 Note that the individual sound velocities Va and Vb are any two elements, that is, the distance between the reference element and the measurement element and the reflection point A in the subject, and the element data and the measurement element corresponding to the reference element. Is calculated based on the time difference ΔT obtained by comparing the element data corresponding to.
At this time, if the interval between the reference element and the measuring element is set to be narrow, the time difference ΔT is reduced and the range for calculating the sound speed is narrowed, and the accuracy of calculation of the individual sound speeds Va and Vb is improved. On the other hand, if the interval between the reference element and the measuring element is set wide, the range in which the sound speed is calculated is widened, and there is a possibility that the spatial resolution of the local sound speed is reduced. For this reason, it is desirable that the interval between the reference element and the measuring element is set as narrow as possible within a range in which the time resolution in the ultrasonic diagnostic apparatus can tolerate the time difference ΔT.
このとき、参考用素子と測定用素子との間隔が狭く設定されると、時間差△Tが小さくなると共に音速を算出する範囲が狭くなり、個別音速VaおよびVbの算出の精度が向上する。一方、参考用素子と測定用素子との間隔が広く設定されると、音速を算出する範囲が広くなり、局所音速の空間的な分解能の低下を招くおそれがある。このため、参考用素子と測定用素子との間隔は、この超音波診断装置における時間分解能が時間差△Tを許容できる範囲で、可能な限り狭く設定されることが望ましい。 Note that the individual sound velocities Va and Vb are any two elements, that is, the distance between the reference element and the measurement element and the reflection point A in the subject, and the element data and the measurement element corresponding to the reference element. Is calculated based on the time difference ΔT obtained by comparing the element data corresponding to.
At this time, if the interval between the reference element and the measuring element is set to be narrow, the time difference ΔT is reduced and the range for calculating the sound speed is narrowed, and the accuracy of calculation of the individual sound speeds Va and Vb is improved. On the other hand, if the interval between the reference element and the measuring element is set wide, the range in which the sound speed is calculated is widened, and there is a possibility that the spatial resolution of the local sound speed is reduced. For this reason, it is desirable that the interval between the reference element and the measuring element is set as narrow as possible within a range in which the time resolution in the ultrasonic diagnostic apparatus can tolerate the time difference ΔT.
また、参考用素子に設定される素子を第1の複数の素子E1~Enのうちの1つの素子に固定することなく、参考用素子を順次変更しながら複数の個別音速Vaを算出することができる。例えば、mを任意の1~n-1の範囲内の整数として、参考用素子をEm、測定用素子をEm+1に設定し、mの値を順次変更しながら個別音速Vaを算出すると、参考用素子Emおよび測定用素子Em+1を順次変更しながら複数の個別音速Vaを算出することができる。
Further, it is possible to calculate a plurality of individual sound velocities Va while sequentially changing the reference elements without fixing the element set as the reference element to one of the first plurality of elements E1 to En. it can. For example, if m is an integer in the range of 1 to n−1, the reference element is set to Em and the measurement element is set to Em + 1, and the individual sound velocity Va is calculated while sequentially changing the value of m, the reference element A plurality of individual sound velocities Va can be calculated while sequentially changing the element Em and the measuring element Em + 1.
このように、互いに隣り合う素子が用いられて音速を算出する範囲が狭くなることで個別音速Vaの算出精度が向上し、さらに、参考用素子および測定用素子とその他の素子との位置関係が順次変更されるため、周辺の音速と異なる音速を有する病変部Bを特定しやすくなる。
また、上記の実施の形態1において、参考用素子と被検体内の反射点Aとの間に病変部Bが位置する場合は、参考用素子が病変部Bを通過した超音波エコーを受信するため、病変部Bを特定し難くなることも考えられるが、参考用素子Emおよび測定用素子Em+1を順次変更しながら複数の個別音速Vaを算出することで、このような事態を回避することができる。 As described above, elements that are adjacent to each other are used to narrow the range in which the sound speed is calculated, so that the accuracy of calculating the individual sound speed Va is improved, and the positional relationship between the reference element and the measuring element and other elements is improved. Since it is changed sequentially, it becomes easy to identify the lesioned part B having a sound speed different from the peripheral sound speed.
In the first embodiment, when the lesioned part B is located between the reference element and the reflection point A in the subject, the reference element receives an ultrasonic echo that has passed through the lesioned part B. Therefore, it may be difficult to specify the lesion B, but this situation can be avoided by calculating a plurality of individual sound velocities Va while sequentially changing the reference element Em and the measurement element Em + 1. it can.
また、上記の実施の形態1において、参考用素子と被検体内の反射点Aとの間に病変部Bが位置する場合は、参考用素子が病変部Bを通過した超音波エコーを受信するため、病変部Bを特定し難くなることも考えられるが、参考用素子Emおよび測定用素子Em+1を順次変更しながら複数の個別音速Vaを算出することで、このような事態を回避することができる。 As described above, elements that are adjacent to each other are used to narrow the range in which the sound speed is calculated, so that the accuracy of calculating the individual sound speed Va is improved, and the positional relationship between the reference element and the measuring element and other elements is improved. Since it is changed sequentially, it becomes easy to identify the lesioned part B having a sound speed different from the peripheral sound speed.
In the first embodiment, when the lesioned part B is located between the reference element and the reflection point A in the subject, the reference element receives an ultrasonic echo that has passed through the lesioned part B. Therefore, it may be difficult to specify the lesion B, but this situation can be avoided by calculating a plurality of individual sound velocities Va while sequentially changing the reference element Em and the measurement element Em + 1. it can.
また、個別音速Vaを算出するのに用いられる素子は必ずしも互いに隣り合っている必要はなく、例えば、xを2以上の任意の整数として、参考用素子をEm、測定用素子をEm+xに設定し、mの値を順次変更して参考用素子Emおよび測定用素子Em+xを順次変更しながら個別音速Vaを算出すると、素子x個分の素子間隔を空けて、大まかな素子間隔で複数の個別音速Vaが算出することができる。算出された複数の個別音速Vaのヒストグラムを作成し、最も頻度が高い個別音速Vaに対応する素子を参考用素子に設定することで、参考用素子と反射点Aとの間に周辺の音速と異なる音速を有する病変部Bが位置することを回避することができる。
The elements used to calculate the individual sound velocity Va do not necessarily have to be adjacent to each other. For example, x is an arbitrary integer of 2 or more, the reference element is set to Em, and the measurement element is set to Em + x. When the individual sound velocity Va is calculated while sequentially changing the reference element Em and the measuring element Em + x by sequentially changing the value of m, a plurality of individual sound velocities are provided at a rough element interval with an element interval corresponding to x elements. Va can be calculated. A histogram of a plurality of calculated individual sound velocities Va is created, and an element corresponding to the most frequent individual sound speed Va is set as a reference element. It is possible to avoid the lesion B having different sound speeds from being located.
実施の形態2
上記の実施の形態1では、被検体内の1つの反射点Aに向けて1回だけ超音波の送受信を行うことで全体音速V1および局所音速V2を定量化したが、複数の反射点に対してそれぞれ1回ずつ超音波の送受信を行って全体音速V1および局所音速V2を定量化することもできる。
例えば、図14に示されるように、1本の走査線Cv上の反射点Avに向けて超音波の送受信を1回行って取得された素子データと、図15に示されるように、走査線Cvとは異なる走査線Cw上の反射点Awに向けて超音波の送受信を1回行って取得された素子データが用いられる。Embodiment 2
In the first embodiment, the total sound speed V1 and the local sound speed V2 are quantified by transmitting and receiving ultrasonic waves only once toward one reflection point A in the subject. Thus, it is possible to quantify the total sound speed V1 and the local sound speed V2 by transmitting and receiving ultrasonic waves once each.
For example, as shown in FIG. 14, element data obtained by transmitting and receiving ultrasonic waves once toward the reflection point Av on one scanning line Cv, and as shown in FIG. 15, the scanning line Element data acquired by performing ultrasonic wave transmission / reception once toward the reflection point Aw on the scanning line Cw different from Cv is used.
上記の実施の形態1では、被検体内の1つの反射点Aに向けて1回だけ超音波の送受信を行うことで全体音速V1および局所音速V2を定量化したが、複数の反射点に対してそれぞれ1回ずつ超音波の送受信を行って全体音速V1および局所音速V2を定量化することもできる。
例えば、図14に示されるように、1本の走査線Cv上の反射点Avに向けて超音波の送受信を1回行って取得された素子データと、図15に示されるように、走査線Cvとは異なる走査線Cw上の反射点Awに向けて超音波の送受信を1回行って取得された素子データが用いられる。
In the first embodiment, the total sound speed V1 and the local sound speed V2 are quantified by transmitting and receiving ultrasonic waves only once toward one reflection point A in the subject. Thus, it is possible to quantify the total sound speed V1 and the local sound speed V2 by transmitting and receiving ultrasonic waves once each.
For example, as shown in FIG. 14, element data obtained by transmitting and receiving ultrasonic waves once toward the reflection point Av on one scanning line Cv, and as shown in FIG. 15, the scanning line Element data acquired by performing ultrasonic wave transmission / reception once toward the reflection point Aw on the scanning line Cw different from Cv is used.
図16のフローチャートに示されるように、実施の形態2においては、ステップS1で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Avに向けて1回だけ超音波の送受信が行われ、ステップS2で、素子データが取得されて素子データメモリ7に格納される。
続くステップS10で、設定された複数の反射点に対する超音波の送受信が完了したか否かが判定され、完了していないと判定された場合は、ステップS11で、反射点を変更した後、ステップS1およびS2が繰り返される。すなわち、走査線Cvから走査線Cwに変えて、反射点Awに向けて1回だけ超音波の送受信が行われ、素子データが取得されて素子データメモリ7に格納される。 As shown in the flowchart of FIG. 16, in the second embodiment, in step S1, ultrasonic waves are emitted only once from the first plurality of elements E1 to En of thearray transducer 1 toward the reflection point Av in the subject. The element data is acquired and stored in the element data memory 7 in step S2.
In subsequent step S10, it is determined whether or not the transmission / reception of ultrasonic waves to / from the plurality of set reflection points is completed. If it is determined that the transmission / reception is not completed, the reflection point is changed in step S11, and then the step is performed. S1 and S2 are repeated. That is, instead of the scanning line Cv to the scanning line Cw, ultrasonic waves are transmitted / received only once toward the reflection point Aw, and element data is acquired and stored in theelement data memory 7.
続くステップS10で、設定された複数の反射点に対する超音波の送受信が完了したか否かが判定され、完了していないと判定された場合は、ステップS11で、反射点を変更した後、ステップS1およびS2が繰り返される。すなわち、走査線Cvから走査線Cwに変えて、反射点Awに向けて1回だけ超音波の送受信が行われ、素子データが取得されて素子データメモリ7に格納される。 As shown in the flowchart of FIG. 16, in the second embodiment, in step S1, ultrasonic waves are emitted only once from the first plurality of elements E1 to En of the
In subsequent step S10, it is determined whether or not the transmission / reception of ultrasonic waves to / from the plurality of set reflection points is completed. If it is determined that the transmission / reception is not completed, the reflection point is changed in step S11, and then the step is performed. S1 and S2 are repeated. That is, instead of the scanning line Cv to the scanning line Cw, ultrasonic waves are transmitted / received only once toward the reflection point Aw, and element data is acquired and stored in the
ステップS10で、全ての反射点における超音波の送受信が完了したと判断された場合、ステップS3で、音速定量化部8の時間差算出部21により、反射点AvおよびAwにそれぞれ対応して参考用素子に対応する素子データと複数の測定用素子に対応する素子データとの比較がされて複数の時間差△Tが算出され、ステップS4で、音速算出部22により、第1の複数の素子E1~Enの幾何学的配置並びに算出された時間差△Tに基づいて反射点AvおよびAwのそれぞれに対応して複数の個別音速Vaが算出される。
さらに、ステップS5で、全体音速決定部23により、反射点AvおよびAwのそれぞれに対応して複数の個別音速Vaのヒストグラムが作成され、最も頻度が高い個別音速Vaが全体領域R1の全体音速V1として決定される。 If it is determined in step S10 that transmission / reception of ultrasonic waves at all reflection points has been completed, in step S3, the timedifference calculation unit 21 of the sound velocity quantification unit 8 corresponds to the reflection points Av and Aw respectively for reference. The element data corresponding to the element and the element data corresponding to the plurality of measurement elements are compared to calculate a plurality of time differences ΔT. In step S4, the sound speed calculation unit 22 causes the first plurality of elements E1 to E1 to be compared. A plurality of individual sound velocities Va are calculated corresponding to each of the reflection points Av and Aw based on the geometrical arrangement of En and the calculated time difference ΔT.
Further, in step S5, the total soundspeed determination unit 23 creates a histogram of a plurality of individual sound speeds Va corresponding to the reflection points Av and Aw, and the individual sound speed Va having the highest frequency is the total sound speed V1 in the entire region R1. As determined.
さらに、ステップS5で、全体音速決定部23により、反射点AvおよびAwのそれぞれに対応して複数の個別音速Vaのヒストグラムが作成され、最も頻度が高い個別音速Vaが全体領域R1の全体音速V1として決定される。 If it is determined in step S10 that transmission / reception of ultrasonic waves at all reflection points has been completed, in step S3, the time
Further, in step S5, the total sound
その後、ステップS6で、外れ領域特定部24により、反射点AvおよびAwのそれぞれに対して外れ領域R2が存在するか否かが判定され、外れ領域R2が特定されると、ステップS7で、外れ領域R2が特定された反射点AvおよびAwのそれぞれに対応して個別音速Vbが算出され、さらに、ステップS8で、局所音速決定部25により、算出された個別音速Vbが外れ領域R2の局所音速V2として決定される。
なお、ステップS6で、複数の反射点AvおよびAwのうち、いずれかの反射点のみで外れ領域R2が特定された場合は、その反射点に対して局所音速V2の決定を行うことができる。 Thereafter, in step S6, the out-of-region specifying unit 24 determines whether or not the out-of-region R2 exists for each of the reflection points Av and Aw. When the out-of-region R2 is specified, the out-of-region R2 is specified in step S7. The individual sound speed Vb is calculated corresponding to each of the reflection points Av and Aw in which the region R2 is specified. Further, in step S8, the calculated individual sound speed Vb is deviated by the local sound speed determination unit 25 from the local sound speed in the region R2. Determined as V2.
In step S6, when the outlying region R2 is specified by only one of the plurality of reflection points Av and Aw, the local sound velocity V2 can be determined for the reflection point.
なお、ステップS6で、複数の反射点AvおよびAwのうち、いずれかの反射点のみで外れ領域R2が特定された場合は、その反射点に対して局所音速V2の決定を行うことができる。 Thereafter, in step S6, the out-of-
In step S6, when the outlying region R2 is specified by only one of the plurality of reflection points Av and Aw, the local sound velocity V2 can be determined for the reflection point.
このように、複数の反射点に対してそれぞれ超音波の送受信を行って素子データを取得することにより、全体音速V1および局所音速V2をより精度よく定量化することが可能となる。
Thus, by transmitting / receiving ultrasonic waves to / from a plurality of reflection points to acquire element data, the total sound speed V1 and the local sound speed V2 can be quantified with higher accuracy.
実施の形態3
上記の実施の形態1および2では、外れ領域R2を特定して外れ領域R2に対応する局所音速V2を定量化したが、実施の形態3では、関心領域R2Aを設定して関心領域R2Aに対応する局所音速V2を定量化する。
図17に、実施の形態3に係る超音波診断装置の構成を示す。実施の形態3に係る超音波診断装置は、図1に示した実施の形態1に係る超音波診断装置の構成において、音速定量化部8の代わりに音速定量化部8Aを用い、さらに、関心領域設定部17を備えており、関心領域設定部17に音速定量化部8Aおよび制御部9が接続されている。また、図18は、音速定量化部8Aの内部構成を示しており、音速定量化部8Aは、実施の形態1の図4に示した音速定量化部8において、外れ領域特定部24を備えておらず、時間差算出部21、全体音速決定部23および局所音速決定部25がそれぞれ関心領域設定部17に接続されているものである。Embodiment 3
In the first and second embodiments, the outlier region R2 is specified and the local sound velocity V2 corresponding to the outlier region R2 is quantified. However, in the third embodiment, the region of interest R2A is set to correspond to the region of interest R2A. The local sound speed V2 is quantified.
FIG. 17 shows the configuration of the ultrasonic diagnostic apparatus according to the third embodiment. The ultrasonic diagnostic apparatus according to the third embodiment uses a soundvelocity quantifying unit 8A instead of the sound velocity quantifying unit 8 in the configuration of the ultrasonic diagnostic apparatus according to the first embodiment shown in FIG. The region setting unit 17 is provided, and the sound velocity quantifying unit 8A and the control unit 9 are connected to the region of interest setting unit 17. FIG. 18 shows the internal configuration of the sound speed quantification unit 8A. The sound speed quantification unit 8A includes the out-of-range region specifying unit 24 in the sound speed quantification unit 8 shown in FIG. 4 of the first embodiment. In addition, the time difference calculation unit 21, the overall sound speed determination unit 23, and the local sound speed determination unit 25 are each connected to the region of interest setting unit 17.
上記の実施の形態1および2では、外れ領域R2を特定して外れ領域R2に対応する局所音速V2を定量化したが、実施の形態3では、関心領域R2Aを設定して関心領域R2Aに対応する局所音速V2を定量化する。
図17に、実施の形態3に係る超音波診断装置の構成を示す。実施の形態3に係る超音波診断装置は、図1に示した実施の形態1に係る超音波診断装置の構成において、音速定量化部8の代わりに音速定量化部8Aを用い、さらに、関心領域設定部17を備えており、関心領域設定部17に音速定量化部8Aおよび制御部9が接続されている。また、図18は、音速定量化部8Aの内部構成を示しており、音速定量化部8Aは、実施の形態1の図4に示した音速定量化部8において、外れ領域特定部24を備えておらず、時間差算出部21、全体音速決定部23および局所音速決定部25がそれぞれ関心領域設定部17に接続されているものである。
In the first and second embodiments, the outlier region R2 is specified and the local sound velocity V2 corresponding to the outlier region R2 is quantified. However, in the third embodiment, the region of interest R2A is set to correspond to the region of interest R2A. The local sound speed V2 is quantified.
FIG. 17 shows the configuration of the ultrasonic diagnostic apparatus according to the third embodiment. The ultrasonic diagnostic apparatus according to the third embodiment uses a sound
関心領域設定部17は、アレイトランスデューサ1により撮像される撮像領域内に関心領域R2Aを設定する。関心領域R2Aは、例えば病変部の位置に合わせて設定され、関心領域設定部17は、操作部10から入力されたユーザの指定に基づいて関心領域R2Aを設定する、あるいは、画像生成部4により生成された超音波画像を画像解析することにより、病変などの周辺とは異なる特異な領域としての関心領域R2Aを自動的に設定することができる。
The region-of-interest setting unit 17 sets the region of interest R2A within the imaging region imaged by the array transducer 1. The region of interest R2A is set, for example, according to the position of the lesion, and the region of interest setting unit 17 sets the region of interest R2A based on the user's designation input from the operation unit 10, or the image generating unit 4 By analyzing the generated ultrasonic image, it is possible to automatically set the region of interest R2A as a specific region different from the surrounding such as a lesion.
時間差算出部21は、全体音速決定部23が全体音速V1を決定する際に、関心領域設定部17が設定した関心領域R2A以外の領域R1Aを通過する超音波エコーを受信する素子に対応する素子データに基づいて、第1の時間差△T1を算出する。
図19において、関心領域R2A以外の領域R1Aを通る超音波エコーを受信する素子が超音波エコーを受信する時刻を記録すると、図20に示されるようなグラフが得られる。図20において、Erは、関心領域R2Aを通る超音波エコーを受信した2つ以上の素子を表しており、この素子Erに対応する超音波エコーの受信時刻は空白となっている。 The timedifference calculation unit 21 is an element corresponding to an element that receives an ultrasonic echo that passes through the region R1A other than the region of interest R2A set by the region of interest setting unit 17 when the total sound speed determination unit 23 determines the total sound velocity V1. Based on the data, a first time difference ΔT1 is calculated.
In FIG. 19, when the time at which an element that receives an ultrasonic echo passing through the region R1A other than the region of interest R2A receives the ultrasonic echo is recorded, a graph as shown in FIG. 20 is obtained. In FIG. 20, Er represents two or more elements that have received an ultrasonic echo passing through the region of interest R2A, and the reception time of the ultrasonic echo corresponding to this element Er is blank.
図19において、関心領域R2A以外の領域R1Aを通る超音波エコーを受信する素子が超音波エコーを受信する時刻を記録すると、図20に示されるようなグラフが得られる。図20において、Erは、関心領域R2Aを通る超音波エコーを受信した2つ以上の素子を表しており、この素子Erに対応する超音波エコーの受信時刻は空白となっている。 The time
In FIG. 19, when the time at which an element that receives an ultrasonic echo passing through the region R1A other than the region of interest R2A receives the ultrasonic echo is recorded, a graph as shown in FIG. 20 is obtained. In FIG. 20, Er represents two or more elements that have received an ultrasonic echo passing through the region of interest R2A, and the reception time of the ultrasonic echo corresponding to this element Er is blank.
ここで、kを1~nの範囲内の整数とすると、素子Ekが超音波エコーを受信した時刻Tkと、素子Eiが超音波エコーを受信した時刻Tiにより、素子Ekの素子データと素子Eiの素子データとの第1の時間差△T1は、△T1=Ti-Tkとなる。
そして、図19に示されるように、素子Ekから反射点Aまでの距離をLk、素子Eiから反射点Aまでの距離をLiとすると、素子Eiに対応する個別音速Vaは、Va=(Li-Lk)/(Ti-Tk)となり、実施の形態1に示したように、2つの素子を用いて個別音速Vaを算出することができる。 Here, if k is an integer in the range of 1 to n, the element data of the element Ek and the element Ei are determined by the time Tk when the element Ek receives the ultrasonic echo and the time Ti when the element Ei receives the ultrasonic echo. The first time difference ΔT1 with the element data is ΔT1 = Ti−Tk.
Then, as shown in FIG. 19, when the distance from the element Ek to the reflection point A is Lk and the distance from the element Ei to the reflection point A is Li, the individual sound velocity Va corresponding to the element Ei is Va = (Li −Lk) / (Ti−Tk). As shown in the first embodiment, the individual sound velocity Va can be calculated using two elements.
そして、図19に示されるように、素子Ekから反射点Aまでの距離をLk、素子Eiから反射点Aまでの距離をLiとすると、素子Eiに対応する個別音速Vaは、Va=(Li-Lk)/(Ti-Tk)となり、実施の形態1に示したように、2つの素子を用いて個別音速Vaを算出することができる。 Here, if k is an integer in the range of 1 to n, the element data of the element Ek and the element Ei are determined by the time Tk when the element Ek receives the ultrasonic echo and the time Ti when the element Ei receives the ultrasonic echo. The first time difference ΔT1 with the element data is ΔT1 = Ti−Tk.
Then, as shown in FIG. 19, when the distance from the element Ek to the reflection point A is Lk and the distance from the element Ei to the reflection point A is Li, the individual sound velocity Va corresponding to the element Ei is Va = (Li −Lk) / (Ti−Tk). As shown in the first embodiment, the individual sound velocity Va can be calculated using two elements.
さらに、時間差算出部21が、領域R1Aを通る超音波エコーを受信した第2の複数の素子E1~Enのうち1つの素子を参考用素子に、参考用素子以外の複数の素子を測定用素子に設定する。時間差算出部21により、領域R1Aを通る超音波エコーを受信したそれぞれの素子が超音波エコーを受信した時刻に基づいて、複数の第1の時間差△T1が算出される。
Further, the time difference calculation unit 21 uses one of the second plurality of elements E1 to En that has received the ultrasonic echo passing through the region R1A as a reference element, and a plurality of elements other than the reference element as measurement elements. Set to. The time difference calculation unit 21 calculates a plurality of first time differences ΔT1 based on the time at which each element that has received the ultrasonic echo passing through the region R1A has received the ultrasonic echo.
時間差算出部21により算出された複数の第1の時間差△T1、並びに、領域R1Aを通る超音波エコーを受信した第2の複数の素子E1~Enと反射点Aとの幾何学的配置に基づいて、音速算出部22により、複数の個別音速Vaが算出される。そして、全体音速決定部23により、音速算出部22により算出された複数の個別音速Vaのヒストグラムが作成され、最も頻度が高い個別音速Vaが領域R1Aに対応する全体音速V1として決定される。
なお、関心領域R2A以外の領域R1Aにおいて病変部が存在せず、領域R1Aの音速が一様であるとみなすことができる場合は、複数の個別音速Vaの平均値を領域R1Aに対応する全体音速V1として決定することもできる。 Based on the plurality of first time differences ΔT1 calculated by the timedifference calculation unit 21 and the geometrical arrangement of the second plurality of elements E1 to En and the reflection point A that have received the ultrasonic echoes passing through the region R1A. Thus, the sound speed calculation unit 22 calculates a plurality of individual sound speeds Va. Then, a histogram of a plurality of individual sound speeds Va calculated by the sound speed calculation unit 22 is created by the overall sound speed determination unit 23, and the individual sound speed Va having the highest frequency is determined as the overall sound speed V1 corresponding to the region R1A.
In the case where no lesion exists in the region R1A other than the region of interest R2A and the sound speed of the region R1A can be considered to be uniform, the average value of the plurality of individual sound speeds Va is set to the overall sound speed corresponding to the region R1A. It can also be determined as V1.
なお、関心領域R2A以外の領域R1Aにおいて病変部が存在せず、領域R1Aの音速が一様であるとみなすことができる場合は、複数の個別音速Vaの平均値を領域R1Aに対応する全体音速V1として決定することもできる。 Based on the plurality of first time differences ΔT1 calculated by the time
In the case where no lesion exists in the region R1A other than the region of interest R2A and the sound speed of the region R1A can be considered to be uniform, the average value of the plurality of individual sound speeds Va is set to the overall sound speed corresponding to the region R1A. It can also be determined as V1.
また、図21に示されるように、関心領域R2Aを通る超音波エコーを受信した素子Esおよび素子Etを用いて、関心領域R2A内の個別音速Vbを算出することができる。ここで、sおよびtは、1~nの範囲内の整数を示している。
図21において、関心領域R2Aを通る超音波エコーを受信する素子が超音波エコーを受信する時刻を記録すると、図22に示されるようなグラフが得られる。図22において、関心領域R2Aを通る超音波エコーを受信した素子Er以外の素子に対応する超音波エコーの受信時刻は空白となっている。 Further, as shown in FIG. 21, the individual sound velocity Vb in the region of interest R2A can be calculated using the element Es and the element Et that have received the ultrasonic echo passing through the region of interest R2A. Here, s and t are integers in the range of 1 to n.
In FIG. 21, when the time at which an element that receives an ultrasonic echo passing through the region of interest R2A receives the ultrasonic echo is recorded, a graph as shown in FIG. 22 is obtained. In FIG. 22, the reception time of the ultrasonic echo corresponding to the element other than the element Er that has received the ultrasonic echo passing through the region of interest R2A is blank.
図21において、関心領域R2Aを通る超音波エコーを受信する素子が超音波エコーを受信する時刻を記録すると、図22に示されるようなグラフが得られる。図22において、関心領域R2Aを通る超音波エコーを受信した素子Er以外の素子に対応する超音波エコーの受信時刻は空白となっている。 Further, as shown in FIG. 21, the individual sound velocity Vb in the region of interest R2A can be calculated using the element Es and the element Et that have received the ultrasonic echo passing through the region of interest R2A. Here, s and t are integers in the range of 1 to n.
In FIG. 21, when the time at which an element that receives an ultrasonic echo passing through the region of interest R2A receives the ultrasonic echo is recorded, a graph as shown in FIG. 22 is obtained. In FIG. 22, the reception time of the ultrasonic echo corresponding to the element other than the element Er that has received the ultrasonic echo passing through the region of interest R2A is blank.
図21に示されるように、反射点Aから関心領域R2Aを通って素子Esまで達する超音波エコーの経路上において、反射点Aから関心領域R2Aまでの距離をLs1、関心領域R2A内の距離をLs2、関心領域R2Aから素子Esまでの距離をLs3とし、反射点Aから関心領域R2Aに達する時間をTs1、関心領域R2Aを通過する時間をTs2、関心領域R2Aから素子Esに達する時間をTs3とすれば、反射点Aから関心領域R2Aを通過して素子Esまで超音波エコーが達する時間Tsは、Ts=Ts1+Ts2+Ts3と表され、関心領域R2A以外の領域R1Aを通過した時間は、(Ts1+Ts3)と表される。関心領域R2A以外の領域R1Aの全体音速V1が全体音速決定部23により決定されているので、領域R1Aを通過した時間(Ts1+Ts3)は、(Ts1+Ts3)=(Ls1+Ls3)/V1となる。そして、関心領域R2Aを通過した時間Ts2は、Ts2=Ts-(Ts1+Ts3)となる。
As shown in FIG. 21, on the path of the ultrasonic echo reaching the element Es from the reflection point A through the region of interest R2A, the distance from the reflection point A to the region of interest R2A is Ls1, and the distance in the region of interest R2A is Ls2, the distance from the region of interest R2A to the element Es is Ls3, the time to reach the region of interest R2A from the reflection point A is Ts1, the time to pass the region of interest R2A is Ts2, and the time to reach the element Es from the region of interest R2A is Ts3 Then, the time Ts that the ultrasonic echo reaches from the reflection point A through the region of interest R2A to the element Es is expressed as Ts = Ts1 + Ts2 + Ts3, and the time that has passed through the region R1A other than the region of interest R2A is (Ts1 + Ts3). expressed. Since the total sound speed V1 of the region R1A other than the region of interest R2A is determined by the total sound speed determination unit 23, the time (Ts1 + Ts3) that has passed through the region R1A is (Ts1 + Ts3) = (Ls1 + Ls3) / V1. The time Ts2 that has passed through the region of interest R2A is Ts2 = Ts− (Ts1 + Ts3).
また、反射点Aから関心領域R2Aを通って素子Etまで達する超音波エコーの経路上において、反射点Aから関心領域R2Aまでの距離をLt1、関心領域R2A内の距離をLt2、関心領域R2Aから素子Etまでの距離をLt3とし、反射点Aから関心領域R2Aに達する時間をTt1、関心領域R2Aを通過する時間をTt2、関心領域R2Aから素子Esに達する時間をTs3とすれば、反射点Aから関心領域R2Aを通過して素子Etまで超音波エコーが達する時間Ttは、Tt=Tt1+Tt2+Tt3と表され、関心領域R2A以外の領域R1Aを通過した時間は、(Tt1+Tt3)と表される。さらに、領域R1Aを通過した時間(Tt1+Tt3)は、(Tt1+Tt3)=(Lt1+Lt3)/V1となる。そして、関心領域R2Aを通過した時間Tt2は、Tt2=Tt-(Tt1+Tt3)となる。
時間差算出部21は、素子Esの素子データと素子Etの素子データとの第2の時間差△T2を、△T2=(Tt2-Ts2)として算出し、音速算出部22は、Vb=(Lt2-Ls2)/(Tt2-Ts2)として、素子Esおよび素子Etに対応する個別音速Vbを算出することができる。 Further, on the path of the ultrasonic echo reaching from the reflection point A to the element Et through the region of interest R2A, the distance from the reflection point A to the region of interest R2A is Lt1, the distance in the region of interest R2A is Lt2, and the region of interest R2A is Assuming that the distance to the element Et is Lt3, the time to reach the region of interest R2A from the reflection point A is Tt1, the time to pass through the region of interest R2A is Tt2, and the time to reach the element Es from the region of interest R2A is Ts3. The time Tt from which the ultrasonic echo reaches the element Et through the region of interest R2A is expressed as Tt = Tt1 + Tt2 + Tt3, and the time of passing through the region R1A other than the region of interest R2A is expressed as (Tt1 + Tt3). Furthermore, the time (Tt1 + Tt3) that has passed through the region R1A is (Tt1 + Tt3) = (Lt1 + Lt3) / V1. The time Tt2 that has passed through the region of interest R2A is Tt2 = Tt− (Tt1 + Tt3).
Thetime difference calculator 21 calculates the second time difference ΔT2 between the element data of the element Es and the element data of the element Et as ΔT2 = (Tt2−Ts2), and the sound speed calculator 22 calculates Vb = (Lt2−). The individual sound velocity Vb corresponding to the element Es and the element Et can be calculated as Ls2) / (Tt2-Ts2).
時間差算出部21は、素子Esの素子データと素子Etの素子データとの第2の時間差△T2を、△T2=(Tt2-Ts2)として算出し、音速算出部22は、Vb=(Lt2-Ls2)/(Tt2-Ts2)として、素子Esおよび素子Etに対応する個別音速Vbを算出することができる。 Further, on the path of the ultrasonic echo reaching from the reflection point A to the element Et through the region of interest R2A, the distance from the reflection point A to the region of interest R2A is Lt1, the distance in the region of interest R2A is Lt2, and the region of interest R2A is Assuming that the distance to the element Et is Lt3, the time to reach the region of interest R2A from the reflection point A is Tt1, the time to pass through the region of interest R2A is Tt2, and the time to reach the element Es from the region of interest R2A is Ts3. The time Tt from which the ultrasonic echo reaches the element Et through the region of interest R2A is expressed as Tt = Tt1 + Tt2 + Tt3, and the time of passing through the region R1A other than the region of interest R2A is expressed as (Tt1 + Tt3). Furthermore, the time (Tt1 + Tt3) that has passed through the region R1A is (Tt1 + Tt3) = (Lt1 + Lt3) / V1. The time Tt2 that has passed through the region of interest R2A is Tt2 = Tt− (Tt1 + Tt3).
The
ここで、時間差算出部21が、関心領域R2Aを通る超音波エコーを受信した複数の素子のうちの1つを参考用素子に、参考用素子以外の素子を複数の測定用素子に設定すると、参考用素子が超音波エコーを受信した時刻と、複数の測定用素子が超音波エコーを受信した時刻により、複数の第2の時間差△T2が算出される。算出された複数の第2の時間差△T2、並びに、反射点Aと関心領域R2Aを通過した超音波エコーを受信する複数の素子の幾何学的配置基づき、音速算出部22により、関心領域R2A内の複数の個別音速Vbが算出される。
Here, when the time difference calculation unit 21 sets one of a plurality of elements that have received an ultrasonic echo passing through the region of interest R2A as a reference element, and other than the reference element as a plurality of measurement elements, A plurality of second time differences ΔT2 are calculated based on the time when the reference element receives the ultrasonic echo and the time when the plurality of measuring elements receive the ultrasonic echo. Based on the calculated second time differences ΔT2 and the geometrical arrangement of the plurality of elements that receive the ultrasonic echoes that have passed through the reflection point A and the region of interest R2A, the sound velocity calculation unit 22 causes the region of interest R2A to A plurality of individual sound speeds Vb are calculated.
このように算出された複数の個別音速Vbについて、局所音速決定部25によりヒストグラムが作成され、最も頻度が高い個別音速Vbが関心領域R2Aの局所音速V2として決定される。
なお、関心領域R2Aが病変部に設定されている場合は、関心領域R2Aの音速が一様であると考えられるため、関心領域R2Aに対応する複数の個別音速Vbの平均値を局所音速V2として決定することもできる。また、関心領域R2Aを通過する超音波エコーを受信する素子が2つだけである場合、個別音速Vbが1つだけ算出されるが、局所音速決定部25は、この個別音速Vbを局所音速V2として決定することができる。 A histogram is created by the local soundspeed determination unit 25 for the plurality of individual sound speeds Vb calculated in this manner, and the individual sound speed Vb having the highest frequency is determined as the local sound speed V2 of the region of interest R2A.
When the region of interest R2A is set as a lesion, the sound speed of the region of interest R2A is considered to be uniform. Therefore, the average value of the plurality of individual sound speeds Vb corresponding to the region of interest R2A is set as the local sound speed V2. It can also be determined. In addition, when there are only two elements that receive an ultrasonic echo that passes through the region of interest R2A, only one individual sound velocity Vb is calculated. The local soundspeed determination unit 25 uses this individual sound speed Vb as the local sound speed V2. Can be determined as
なお、関心領域R2Aが病変部に設定されている場合は、関心領域R2Aの音速が一様であると考えられるため、関心領域R2Aに対応する複数の個別音速Vbの平均値を局所音速V2として決定することもできる。また、関心領域R2Aを通過する超音波エコーを受信する素子が2つだけである場合、個別音速Vbが1つだけ算出されるが、局所音速決定部25は、この個別音速Vbを局所音速V2として決定することができる。 A histogram is created by the local sound
When the region of interest R2A is set as a lesion, the sound speed of the region of interest R2A is considered to be uniform. Therefore, the average value of the plurality of individual sound speeds Vb corresponding to the region of interest R2A is set as the local sound speed V2. It can also be determined. In addition, when there are only two elements that receive an ultrasonic echo that passes through the region of interest R2A, only one individual sound velocity Vb is calculated. The local sound
次に、図23のフローチャートを参照して実施の形態3の動作について説明する。
まず、ステップS12で、関心領域設定部17により、アレイトランスデューサ1の第1の複数の素子E1~Enと被検体内の反射点Aとの間に関心領域R2Aが設定される。
続くステップS2で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aに向けて1回だけ超音波の送受信が行われ、ステップS3で、素子データが取得される。すなわち、送信回路2から供給される駆動信号に従って第1の複数の素子E1~Enから反射点Aに向けて超音波が送信され、反射点Aからの超音波エコーを受信した素子E1~Enから受信信号が受信回路3に出力され、受信回路3で素子データが生成されて、順次、素子データメモリ7に格納される。 Next, the operation of the third embodiment will be described with reference to the flowchart of FIG.
First, in step S12, the region of interest R2A is set by the region-of-interest setting unit 17 between the first plurality of elements E1 to En of the array transducer 1 and the reflection point A in the subject.
In subsequent step S2, ultrasonic waves are transmitted / received only once from the first plurality of elements E1 to En of thearray transducer 1 toward the reflection point A in the subject, and element data is acquired in step S3. . That is, ultrasonic waves are transmitted from the first plurality of elements E1 to En to the reflection point A according to the drive signal supplied from the transmission circuit 2, and from the elements E1 to En that have received the ultrasonic echoes from the reflection point A. A reception signal is output to the reception circuit 3, element data is generated by the reception circuit 3, and sequentially stored in the element data memory 7.
まず、ステップS12で、関心領域設定部17により、アレイトランスデューサ1の第1の複数の素子E1~Enと被検体内の反射点Aとの間に関心領域R2Aが設定される。
続くステップS2で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aに向けて1回だけ超音波の送受信が行われ、ステップS3で、素子データが取得される。すなわち、送信回路2から供給される駆動信号に従って第1の複数の素子E1~Enから反射点Aに向けて超音波が送信され、反射点Aからの超音波エコーを受信した素子E1~Enから受信信号が受信回路3に出力され、受信回路3で素子データが生成されて、順次、素子データメモリ7に格納される。 Next, the operation of the third embodiment will be described with reference to the flowchart of FIG.
First, in step S12, the region of interest R2A is set by the region-of-
In subsequent step S2, ultrasonic waves are transmitted / received only once from the first plurality of elements E1 to En of the
次に、ステップS3で、時間差算出部21により、関心領域R2A以外の領域R1Aを通る超音波エコーを受信した第2の複数の素子のうち、1つを参考用素子に、参考用素子以外の素子を複数の測定用素子に設定し、参考用素子に対応する素子データと複数の測定用素子に対応する素子データの間の比較が行われ、複数の第1の時間差△T1が算出される。また、関心領域R2Aを通る超音波エコーを受信した複数の素子のうち、1つを参考用素子に、参考用素子以外の素子を複数の測定用素子に設定し、参考用素子に対応する素子データと複数の測定用素子に対応する素子データの間の比較が行われ、複数の第2の時間差△T2が算出される。
さらに、ステップS13で、領域R1Aを通る超音波エコーを受信した第2の複数の素子の幾何学的配置並びに複数の第1の時間差△T1に基づいて、音速算出部22により領域R1A内の複数の個別音速Vaが算出される。このように算出された複数の個別音速Vaに基づいて、ステップS5で、全体音速決定部23により領域R1A内の全体音速V1が決定される。 Next, in step S3, one of the second plurality of elements having received the ultrasonic echo passing through the region R1A other than the region of interest R2A by the timedifference calculation unit 21 is used as a reference device, and other than the reference device. The element is set as a plurality of measurement elements, and comparison is performed between element data corresponding to the reference element and element data corresponding to the plurality of measurement elements, and a plurality of first time differences ΔT1 are calculated. . In addition, among a plurality of elements that have received an ultrasonic echo passing through the region of interest R2A, one element is set as a reference element, and elements other than the reference element are set as a plurality of measurement elements, and elements corresponding to the reference elements A comparison is made between the data and element data corresponding to a plurality of measuring elements, and a plurality of second time differences ΔT2 are calculated.
Further, in step S13, based on the geometric arrangement of the second plurality of elements that have received the ultrasonic echoes passing through the region R1A and the plurality of first time differences ΔT1, the soundspeed calculation unit 22 performs a plurality of operations in the region R1A. The individual sound velocity Va is calculated. Based on the plurality of individual sound speeds Va calculated in this way, the total sound speed V1 in the region R1A is determined by the total sound speed determination unit 23 in step S5.
さらに、ステップS13で、領域R1Aを通る超音波エコーを受信した第2の複数の素子の幾何学的配置並びに複数の第1の時間差△T1に基づいて、音速算出部22により領域R1A内の複数の個別音速Vaが算出される。このように算出された複数の個別音速Vaに基づいて、ステップS5で、全体音速決定部23により領域R1A内の全体音速V1が決定される。 Next, in step S3, one of the second plurality of elements having received the ultrasonic echo passing through the region R1A other than the region of interest R2A by the time
Further, in step S13, based on the geometric arrangement of the second plurality of elements that have received the ultrasonic echoes passing through the region R1A and the plurality of first time differences ΔT1, the sound
その後、ステップS14で、関心領域R2Aを通る超音波エコーを受信した複数の素子の幾何学的配置並びに複数の第2の時間差△T2に基づいて、音速算出部22により関心領域R2A内の複数の個別音速Vbが算出される。このように算出された複数の個別音速Vbに基づいて、ステップS15で、局所音速決定部25により関心領域R2A内の局所音速V2が決定される。
Thereafter, in step S14, based on the geometric arrangement of the plurality of elements that have received the ultrasonic echoes passing through the region of interest R2A and the plurality of second time differences ΔT2, the sound speed calculation unit 22 performs a plurality of operations in the region of interest R2A. The individual sound speed Vb is calculated. Based on the plurality of individual sound speeds Vb calculated in this manner, the local sound speed V2 in the region of interest R2A is determined by the local sound speed determination unit 25 in step S15.
また、アレイトランスデューサ1の第1の複数の素子E1~Enから超音波ビームの走査を行うことで受信回路3により生成された素子データに基づいて、画像生成部4によりBモード画像信号が生成され、このBモード画像信号が表示制御部5に出力され、超音波画像が表示部6に表示される。
音速定量化部8により決定された全体音速V1および局所音速V2は画像生成部4に出力され、超音波画像と共に全体音速V1および局所音速V2の値が表示部6に表示される。全体音速V1および局所音速V2の双方でなく、局所音速V2の値のみを表示してもよい。 Further, a B-mode image signal is generated by theimage generator 4 based on the element data generated by the receiving circuit 3 by scanning the ultrasonic beam from the first plurality of elements E1 to En of the array transducer 1. The B-mode image signal is output to the display control unit 5 and the ultrasonic image is displayed on the display unit 6.
The total sound speed V1 and the local sound speed V2 determined by the soundspeed quantification unit 8 are output to the image generation unit 4, and the values of the total sound speed V1 and the local sound speed V2 are displayed on the display unit 6 together with the ultrasonic image. Only the value of the local sound speed V2 may be displayed instead of both the overall sound speed V1 and the local sound speed V2.
音速定量化部8により決定された全体音速V1および局所音速V2は画像生成部4に出力され、超音波画像と共に全体音速V1および局所音速V2の値が表示部6に表示される。全体音速V1および局所音速V2の双方でなく、局所音速V2の値のみを表示してもよい。 Further, a B-mode image signal is generated by the
The total sound speed V1 and the local sound speed V2 determined by the sound
さらに、音速定量化部8から出力された全体音速V1および局所音速V2に基づき、画像生成部4が、関心領域R2A以外の領域R1Aについては全体音速V1を用いたBモード画像信号を生成し、関心領域R2Aについては局所音速V2を用いたBモード画像信号を生成することもできる。このようにすれば、関心領域R2A以外の領域R1Aにおいても、関心領域R2Aにおいても、高品質の超音波画像を生成することが可能となる。
Further, based on the total sound speed V1 and the local sound speed V2 output from the sound speed quantification unit 8, the image generation unit 4 generates a B-mode image signal using the total sound speed V1 for the region R1A other than the region of interest R2A. For the region of interest R2A, a B-mode image signal using the local sound speed V2 can also be generated. In this way, it is possible to generate a high-quality ultrasonic image in the region R1A other than the region of interest R2A and also in the region of interest R2A.
実施の形態4
上記の実施の形態3では、被検体内の1つの反射点Aに向けて1回だけ超音波の送受信を行うことで全体音速V1および局所音速V2を定量化したが、複数の反射点に対してそれぞれ1回ずつ超音波の送受信を行って全体音速V1および局所音速V2を定量化することもできる。
例えば、図14に示されるように、1本の走査線Cv上の反射点Avに向けて超音波の送受信を1回行って取得された素子データと、図15に示されるように、走査線Cvとは異なる走査線Cw上の反射点Awに向けて超音波の送受信を1回行って取得された素子データが用いられる。Embodiment 4
InEmbodiment 3 described above, the total sound velocity V1 and the local sound velocity V2 are quantified by transmitting and receiving ultrasonic waves only once toward one reflection point A in the subject. Thus, it is possible to quantify the total sound speed V1 and the local sound speed V2 by transmitting and receiving ultrasonic waves once each.
For example, as shown in FIG. 14, element data obtained by transmitting and receiving ultrasonic waves once toward the reflection point Av on one scanning line Cv, and as shown in FIG. 15, the scanning line Element data acquired by performing ultrasonic wave transmission / reception once toward the reflection point Aw on the scanning line Cw different from Cv is used.
上記の実施の形態3では、被検体内の1つの反射点Aに向けて1回だけ超音波の送受信を行うことで全体音速V1および局所音速V2を定量化したが、複数の反射点に対してそれぞれ1回ずつ超音波の送受信を行って全体音速V1および局所音速V2を定量化することもできる。
例えば、図14に示されるように、1本の走査線Cv上の反射点Avに向けて超音波の送受信を1回行って取得された素子データと、図15に示されるように、走査線Cvとは異なる走査線Cw上の反射点Awに向けて超音波の送受信を1回行って取得された素子データが用いられる。
In
For example, as shown in FIG. 14, element data obtained by transmitting and receiving ultrasonic waves once toward the reflection point Av on one scanning line Cv, and as shown in FIG. 15, the scanning line Element data acquired by performing ultrasonic wave transmission / reception once toward the reflection point Aw on the scanning line Cw different from Cv is used.
図24のフローチャートに示されるように、実施の形態4においては、ステップS12で、関心領域設定部17により関心領域R2Aが設定され、ステップS1で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Avに向けて1回だけ超音波の送受信が行われ、ステップS2で、素子データが取得されて素子データメモリ7に格納される。
続くステップS10で、設定された複数の反射点に対する超音波の送受信が完了したか否かが判定され、完了していないと判定された場合は、ステップS11で、反射点を変更した後、ステップS1およびS2が繰り返される。すなわち、走査線Cvから走査線Cwに変えて、反射点Awに向けて1回だけ超音波の送受信が行われ、素子データが取得されて素子データメモリ7に格納される。 As shown in the flowchart of FIG. 24, in the fourth embodiment, the region of interest R2A is set by the region ofinterest setting unit 17 in step S12, and the first plurality of elements E1 to E1 of the array transducer 1 are set in step S1. Ultrasonic waves are transmitted and received only once from En to the reflection point Av in the subject, and element data is acquired and stored in the element data memory 7 in step S2.
In subsequent step S10, it is determined whether or not the transmission / reception of ultrasonic waves to / from the plurality of set reflection points is completed. If it is determined that the transmission / reception is not completed, the reflection point is changed in step S11, and then the step is performed. S1 and S2 are repeated. That is, instead of the scanning line Cv to the scanning line Cw, ultrasonic waves are transmitted / received only once toward the reflection point Aw, and element data is acquired and stored in theelement data memory 7.
続くステップS10で、設定された複数の反射点に対する超音波の送受信が完了したか否かが判定され、完了していないと判定された場合は、ステップS11で、反射点を変更した後、ステップS1およびS2が繰り返される。すなわち、走査線Cvから走査線Cwに変えて、反射点Awに向けて1回だけ超音波の送受信が行われ、素子データが取得されて素子データメモリ7に格納される。 As shown in the flowchart of FIG. 24, in the fourth embodiment, the region of interest R2A is set by the region of
In subsequent step S10, it is determined whether or not the transmission / reception of ultrasonic waves to / from the plurality of set reflection points is completed. If it is determined that the transmission / reception is not completed, the reflection point is changed in step S11, and then the step is performed. S1 and S2 are repeated. That is, instead of the scanning line Cv to the scanning line Cw, ultrasonic waves are transmitted / received only once toward the reflection point Aw, and element data is acquired and stored in the
ステップS10で、すべての反射点に対する超音波の送受信が完了したと判定されると、ステップS3で、音速定量化部8Aの時間差算出部21により、関心領域R2A以外の領域R1Aにおいて、反射点AvおよびAwにそれぞれ対応して参考用素子に対応する素子データと複数の測定用素子に対応する素子データとの比較がされて複数の第1の時間差△T1が算出される。また、関心領域R2Aにおいて、反射点AvおよびAwにそれぞれ対応して参考用素子に対応する素子データと複数の測定用素子に対応する素子データとの比較がされて複数の第2の時間差△T2が算出される。
続くステップS13で、音速算出部22により、領域R1Aを通る超音波エコーを受信する第2の複数の素子の幾何学的配置並びに複数の第1の時間差△T1に基づいて反射点AvおよびAwのそれぞれに対応して領域R1A内の複数の個別音速Vaが算出される。
さらに、ステップS5で、全体音速決定部23により、反射点AvおよびAwのそれぞれに対応して複数の個別音速Vaのヒストグラムが作成され、最も頻度が高い個別音速Vaが領域R1A内の全体音速V1として決定される。 If it is determined in step S10 that transmission / reception of ultrasonic waves to all reflection points has been completed, the reflection point Av in the region R1A other than the region of interest R2A is detected by the timedifference calculation unit 21 of the sound velocity quantification unit 8A in step S3. The element data corresponding to the reference element and the element data corresponding to the plurality of measurement elements are respectively compared with Aw and Aw to calculate a plurality of first time differences ΔT1. Further, in the region of interest R2A, the element data corresponding to the reference element and the element data corresponding to the plurality of measurement elements are respectively compared with the reflection points Av and Aw, and a plurality of second time differences ΔT2 are compared. Is calculated.
In subsequent step S13, the soundspeed calculation unit 22 determines the reflection points Av and Aw based on the geometrical arrangement of the second plurality of elements that receive the ultrasonic echo passing through the region R1A and the plurality of first time differences ΔT1. Corresponding to each, a plurality of individual sound velocities Va in the region R1A are calculated.
Further, in step S5, the overall soundspeed determination unit 23 creates a histogram of a plurality of individual sound speeds Va corresponding to each of the reflection points Av and Aw, and the individual sound speed Va having the highest frequency is the overall sound speed V1 in the region R1A. As determined.
続くステップS13で、音速算出部22により、領域R1Aを通る超音波エコーを受信する第2の複数の素子の幾何学的配置並びに複数の第1の時間差△T1に基づいて反射点AvおよびAwのそれぞれに対応して領域R1A内の複数の個別音速Vaが算出される。
さらに、ステップS5で、全体音速決定部23により、反射点AvおよびAwのそれぞれに対応して複数の個別音速Vaのヒストグラムが作成され、最も頻度が高い個別音速Vaが領域R1A内の全体音速V1として決定される。 If it is determined in step S10 that transmission / reception of ultrasonic waves to all reflection points has been completed, the reflection point Av in the region R1A other than the region of interest R2A is detected by the time
In subsequent step S13, the sound
Further, in step S5, the overall sound
その後、ステップS14で、音速算出部22により、関心領域R2Aを通る超音波エコーを受信した複数の素子の幾何学的配置並びに複数の第2の時間差△T2に基づき、反射点AvおよびAwのそれぞれに対応して関心領域R2A内の複数の個別音速Vbが算出される。さらに、ステップS15で、局所音速決定部25により、反射点AvおよびAwのそれぞれに対応して複数の個別音速Vbのヒストグラムが作成され、最も頻度が高い個別音速Vbが関心領域R2A内の局所音速V2として決定される。
このように、複数の反射点に対してそれぞれ超音波の送受信を行って素子データを取得することにより、全体音速V1および局所音速V2をより精度よく定量化することが可能となる。 Thereafter, in step S14, each of the reflection points Av and Aw is determined based on the geometrical arrangement of the plurality of elements and the plurality of second time differences ΔT2 received by the soundspeed calculation unit 22 through the region of interest R2A. Corresponding to the plurality of individual sound velocities Vb in the region of interest R2A. Further, in step S15, the local sound speed determination unit 25 creates a histogram of a plurality of individual sound speeds Vb corresponding to each of the reflection points Av and Aw, and the individual sound speed Vb having the highest frequency is the local sound speed in the region of interest R2A. Determined as V2.
Thus, by transmitting / receiving ultrasonic waves to / from a plurality of reflection points to acquire element data, it is possible to quantify the total sound speed V1 and the local sound speed V2 with higher accuracy.
このように、複数の反射点に対してそれぞれ超音波の送受信を行って素子データを取得することにより、全体音速V1および局所音速V2をより精度よく定量化することが可能となる。 Thereafter, in step S14, each of the reflection points Av and Aw is determined based on the geometrical arrangement of the plurality of elements and the plurality of second time differences ΔT2 received by the sound
Thus, by transmitting / receiving ultrasonic waves to / from a plurality of reflection points to acquire element data, it is possible to quantify the total sound speed V1 and the local sound speed V2 with higher accuracy.
実施の形態5
上記の実施の形態3および4では、関心領域設定部17により関心領域R2Aが設定されると、関心領域R2A以外の領域R1Aにおける全体音速V1と関心領域R2Aにおける局所音速V2の双方が決定されたが、関心領域設定部17により設定された関心領域R2Aの大きさ等に応じて、全体音速V1および局所音速V2のうち定量化する音速を選択することもできる。
実施の形態5に係る超音波診断装置は、関心領域R2Aの走査方向の長さおよび深度方向の長さがいずれも設定値より大きい場合には、全体音速V1および局所音速V2の双方を定量化し、関心領域R2Aの走査方向の長さおよび深度方向の長さの少なくとも一方が設定値以下の場合には、局所音速V2を定量化することなく全体音速V1のみを定量化するようにしたものである。 Embodiment 5
In the above third and fourth embodiments, when the region of interest R2A is set by the region ofinterest setting unit 17, both the overall sound velocity V1 in the region R1A other than the region of interest R2A and the local sound velocity V2 in the region of interest R2A are determined. However, according to the size of the region of interest R2A set by the region-of-interest setting unit 17, the sound speed to be quantified can be selected from the overall sound speed V1 and the local sound speed V2.
The ultrasonic diagnostic apparatus according to Embodiment 5 quantifies both the total sound speed V1 and the local sound speed V2 when both the length in the scanning direction and the length in the depth direction of the region of interest R2A are larger than the set values. When at least one of the length in the scanning direction and the length in the depth direction of the region of interest R2A is equal to or less than the set value, only the total sound speed V1 is quantified without quantifying the local sound speed V2. is there.
上記の実施の形態3および4では、関心領域設定部17により関心領域R2Aが設定されると、関心領域R2A以外の領域R1Aにおける全体音速V1と関心領域R2Aにおける局所音速V2の双方が決定されたが、関心領域設定部17により設定された関心領域R2Aの大きさ等に応じて、全体音速V1および局所音速V2のうち定量化する音速を選択することもできる。
実施の形態5に係る超音波診断装置は、関心領域R2Aの走査方向の長さおよび深度方向の長さがいずれも設定値より大きい場合には、全体音速V1および局所音速V2の双方を定量化し、関心領域R2Aの走査方向の長さおよび深度方向の長さの少なくとも一方が設定値以下の場合には、局所音速V2を定量化することなく全体音速V1のみを定量化するようにしたものである。 Embodiment 5
In the above third and fourth embodiments, when the region of interest R2A is set by the region of
The ultrasonic diagnostic apparatus according to Embodiment 5 quantifies both the total sound speed V1 and the local sound speed V2 when both the length in the scanning direction and the length in the depth direction of the region of interest R2A are larger than the set values. When at least one of the length in the scanning direction and the length in the depth direction of the region of interest R2A is equal to or less than the set value, only the total sound speed V1 is quantified without quantifying the local sound speed V2. is there.
図25に、実施の形態5に係る超音波診断装置の動作を示す。
まず、ステップS12で、関心領域設定部17により関心領域R2Aが設定され、ステップS1で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aに向けて1回だけ超音波の送受信が行われ、ステップS2で、素子データが取得されて素子データメモリ7に格納される。 FIG. 25 shows the operation of the ultrasonic diagnostic apparatus according to the fifth embodiment.
First, in step S12, the region of interest R2A is set by the region ofinterest setting unit 17, and in step S1, the first plurality of elements E1 to En of the array transducer 1 is directed only once toward the reflection point A in the subject. Ultrasonic waves are transmitted and received, and element data is acquired and stored in the element data memory 7 in step S2.
まず、ステップS12で、関心領域設定部17により関心領域R2Aが設定され、ステップS1で、アレイトランスデューサ1の第1の複数の素子E1~Enから被検体内の反射点Aに向けて1回だけ超音波の送受信が行われ、ステップS2で、素子データが取得されて素子データメモリ7に格納される。 FIG. 25 shows the operation of the ultrasonic diagnostic apparatus according to the fifth embodiment.
First, in step S12, the region of interest R2A is set by the region of
その後、ステップS16で、制御部9により関心領域R2Aの走査方向の長さおよび深度方向の長さに関する条件Y1が成立するか否かが判定される。条件Y1は、関心領域R2Aの走査方向の長さおよび深度方向の長さがいずれも予め設定された設定値より大きいという条件である。設定値は、例えば、アレイトランスデューサ1の第1の複数の素子E1~Enの配列ピッチの1/10の長さとすることができる。関心領域R2Aの走査方向の長さおよび深度方向の長さがこのような設定値以下の場合には、反射点から関心領域R2Aを通ってアレイトランスデューサ1の素子に到達する超音波エコーの伝搬時間に対する関心領域R2Aの影響が小さすぎて関心領域R2A内の局所音速V2を正確に定量化することが困難になる。
Thereafter, in step S16, the controller 9 determines whether or not a condition Y1 regarding the length in the scanning direction and the length in the depth direction of the region of interest R2A is satisfied. The condition Y1 is a condition that both the length in the scanning direction and the length in the depth direction of the region of interest R2A are larger than a preset set value. The set value can be, for example, a length of 1/10 of the arrangement pitch of the first plurality of elements E1 to En of the array transducer 1. When the length in the scanning direction and the length in the depth direction of the region of interest R2A are equal to or smaller than such set values, the propagation time of the ultrasonic echo that reaches the element of the array transducer 1 from the reflection point through the region of interest R2A The influence of the region of interest R2A on is too small, and it becomes difficult to accurately quantify the local sound speed V2 in the region of interest R2A.
そこで、ステップS16において、関心領域R2Aの走査方向の長さおよび深度方向の長さがいずれも設定値より大きくて条件Y1が成立すると判定されたときには、ステップS17に進んで、全体音速V1および局所音速V2の双方を定量化する定量化処理100が実行され、一方、関心領域R2Aの走査方向の長さおよび深度方向の長さの少なくとも一方が設定値以下であるので条件Y1が成立しないと判定されたときには、ステップS18に進んで、全体音速V1のみを定量化する定量化処理200が実行される。
Therefore, when it is determined in step S16 that the length in the scanning direction and the length in the depth direction of the region of interest R2A are both greater than the set value and the condition Y1 is satisfied, the process proceeds to step S17, where the overall sound speed V1 and the local sound speed V1 A quantification process 100 for quantifying both the sound speeds V2 is executed. On the other hand, it is determined that the condition Y1 is not satisfied because at least one of the length in the scanning direction and the length in the depth direction of the region of interest R2A is equal to or less than a set value. If so, the process proceeds to step S18, and a quantification process 200 for quantifying only the overall sound speed V1 is executed.
定量化処理100においては、図26に示されるように、ステップS3で、時間差算出部21により、素子データメモリ7に格納されている素子データのうち、関心領域R2A以外の領域R1Aを通過する超音波エコーを受信した第2の複数の素子に対応する素子データに基づいて複数の第1の時間差△T1が算出され、また、素子データメモリ7に格納されている素子データのうち、関心領域R2Aを通過する超音波エコーを受信した複数の素子に対応する素子データに基づいて複数の第2の時間差△T2が算出される。続くステップS13で、音速算出部22により領域R1A内の複数の個別音速Vaが算出され、ステップS5で、全体音速決定部23により、複数の個別音速Vaに基づいて領域R1A内の全体音速V1が決定される。さらに、ステップS14で、音速算出部22により関心領域R2A内の複数の個別音速Vbが算出され、ステップS15で、局所音速決定部25により、複数の個別音速Vbに基づいて関心領域R2A内の局所音速V2が決定される。
In the quantification process 100, as shown in FIG. 26, in step S3, the time difference calculation unit 21 uses the time difference calculation unit 21 to store the element data stored in the element data memory 7 in the region R1A other than the region of interest R2A. A plurality of first time differences ΔT1 are calculated based on element data corresponding to the second plurality of elements that have received the acoustic echoes, and among the element data stored in the element data memory 7, the region of interest R2A A plurality of second time differences ΔT2 are calculated based on element data corresponding to the plurality of elements that have received the ultrasonic echoes passing through. In subsequent step S13, the sound velocity calculation unit 22 calculates a plurality of individual sound velocities Va in the region R1A. In step S5, the overall sound speed determination unit 23 calculates the overall sound speed V1 in the region R1A based on the plurality of individual sound velocities Va. It is determined. Further, in step S14, the sound speed calculation unit 22 calculates a plurality of individual sound speeds Vb in the region of interest R2A. In step S15, the local sound speed determination unit 25 calculates the local sound speeds Vb in the region of interest R2A based on the plurality of individual sound speeds Vb. The speed of sound V2 is determined.
一方、定量化処理200においては、図27に示されるように、ステップS3で、時間差算出部21により、素子データメモリ7に格納されている素子データのうち、関心領域R2A以外の領域R1Aを通過する超音波エコーを受信した第2の複数の素子に対応する素子データに基づいて複数の第1の時間差△T1が算出される。続くステップS13で、音速算出部22により領域R1A内の複数の個別音速Vaが算出され、ステップS5で、全体音速決定部23により、複数の個別音速Vaに基づいて領域R1A内の全体音速V1が決定され、関心領域R2A内の局所音速V2の定量化は行われない。
On the other hand, in the quantification process 200, as shown in FIG. 27, the time difference calculation unit 21 passes the region R1A other than the region of interest R2A among the element data stored in the element data memory 7 in step S3. A plurality of first time differences ΔT1 are calculated based on element data corresponding to the second plurality of elements that have received the ultrasonic echo. In subsequent step S13, the sound velocity calculation unit 22 calculates a plurality of individual sound velocities Va in the region R1A. In step S5, the overall sound speed determination unit 23 calculates the overall sound speed V1 in the region R1A based on the plurality of individual sound velocities Va. The local sound speed V2 in the region of interest R2A is not quantified.
また、関心領域設定部17により設定された関心領域R2Aが走査方向に長くて、被検体内の反射点とアレイトランスデューサ1の第1の複数の素子E1~Enとを結ぶ複数の直線のうち関心領域R2Aを通る直線が所定の割合(例えば、80%)を越えるような場合には、関心領域R2A以外の領域R1Aを通る超音波エコーを受信した素子が少なく、領域R1Aの全体音速V1を正確に定量化することが困難になる。
Further, the region of interest R2A set by the region of interest setting unit 17 is long in the scanning direction, and the region of interest among the plurality of straight lines connecting the reflection points in the subject and the first plurality of elements E1 to En of the array transducer 1 When the straight line passing through the region R2A exceeds a predetermined ratio (for example, 80%), there are few elements that have received ultrasonic echoes through the region R1A other than the region of interest R2A, and the overall sound speed V1 of the region R1A is accurately determined. It becomes difficult to quantify.
そこで、反射点とアレイトランスデューサ1の第1の複数の素子E1~Enとを結ぶ複数の直線のうち関心領域R2Aを通る直線が所定の割合(例えば、80%)を越える条件を条件Y2とし、図28に示されるように、ステップS16で、関心領域R2Aの走査方向の長さおよび深度方向の長さがいずれも設定値より大きくて条件Y1が成立すると判定された場合に、続くステップS19で、制御部9により条件Y2が成立するか否かを判定し、条件Y2が成立する場合に、さらにステップS20に進んで、局所音速V2のみを定量化する定量化処理300を実行することもできる。
ステップS19で、反射点とアレイトランスデューサ1の第1の複数の素子E1~Enとを結ぶ複数の直線のうち関心領域R2Aを通る直線が所定の割合(例えば、80%)以下であるために条件Y2が成立しないと判定されたときには、ステップS17に進んで、全体音速V1および局所音速V2の双方を定量化する定量化処理100が実行される。 Therefore, a condition where the straight line passing through the region of interest R2A out of a plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of thearray transducer 1 exceeds a predetermined ratio (for example, 80%) is defined as a condition Y2. As shown in FIG. 28, when it is determined in step S16 that the length in the scanning direction and the length in the depth direction of the region of interest R2A are both larger than the set value and the condition Y1 is satisfied, in the subsequent step S19 Then, the control unit 9 determines whether or not the condition Y2 is satisfied, and when the condition Y2 is satisfied, the process further proceeds to step S20 to execute the quantification process 300 for quantifying only the local sound velocity V2. .
In step S19, the condition is that the straight line passing through the region of interest R2A among the plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of thearray transducer 1 is equal to or less than a predetermined ratio (for example, 80%). When it is determined that Y2 is not established, the process proceeds to step S17, and a quantification process 100 for quantifying both the overall sound speed V1 and the local sound speed V2 is executed.
ステップS19で、反射点とアレイトランスデューサ1の第1の複数の素子E1~Enとを結ぶ複数の直線のうち関心領域R2Aを通る直線が所定の割合(例えば、80%)以下であるために条件Y2が成立しないと判定されたときには、ステップS17に進んで、全体音速V1および局所音速V2の双方を定量化する定量化処理100が実行される。 Therefore, a condition where the straight line passing through the region of interest R2A out of a plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of the
In step S19, the condition is that the straight line passing through the region of interest R2A among the plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of the
定量化処理300においては、図29に示されるように、ステップS3で、時間差算出部21により、素子データメモリ7に格納されている素子データのうち、関心領域R2Aを通過する超音波エコーを受信した複数の素子に対応する素子データに基づいて複数の第2の時間差△T2が算出される。続くステップS14で、音速算出部22により関心領域R2A内の複数の個別音速Vbが算出され、ステップS15で、局所音速決定部25により複数の個別音速Vbに基づいて関心領域R2Aの局所音速V2が決定され、全体音速V1の定量化は行われない。
この実施の形態5のように、関心領域設定部17により設定された関心領域R2Aの大きさ等に応じて、全体音速V1および局所音速V2のうち定量化する音速を選択することにより、高精度な音速の定量化が可能となる。 In the quantification process 300, as shown in FIG. 29, in step S3, the timedifference calculation unit 21 receives an ultrasonic echo that passes through the region of interest R2A among the element data stored in the element data memory 7. A plurality of second time differences ΔT2 are calculated based on element data corresponding to the plurality of elements. In subsequent step S14, the sound speed calculation unit 22 calculates a plurality of individual sound speeds Vb in the region of interest R2A. In step S15, the local sound speed determination unit 25 calculates the local sound speed V2 of the region of interest R2A based on the plurality of individual sound speeds Vb. The total sound speed V1 is not quantified.
As in the fifth embodiment, by selecting the sound speed to be quantified from the overall sound speed V1 and the local sound speed V2 according to the size of the area of interest R2A set by the area ofinterest setting unit 17, the high accuracy Quantification of sound speed is possible.
この実施の形態5のように、関心領域設定部17により設定された関心領域R2Aの大きさ等に応じて、全体音速V1および局所音速V2のうち定量化する音速を選択することにより、高精度な音速の定量化が可能となる。 In the quantification process 300, as shown in FIG. 29, in step S3, the time
As in the fifth embodiment, by selecting the sound speed to be quantified from the overall sound speed V1 and the local sound speed V2 according to the size of the area of interest R2A set by the area of
同様に、複数の反射点を利用して全体音速V1および局所音速V2を定量化する実施の形態2に対しても、関心領域設定部17により設定された関心領域R2Aの大きさ等に応じて、全体音速V1および局所音速V2のうち定量化する音速を選択することができる。
なお、反射点を変更しても、関心領域R2Aの走査方向の長さおよび深度方向の長さは変わらないので、条件Y1が成立するか否かについてのステップS16における判定は、複数の反射点に対して同一の結果になる。一方、反射点とアレイトランスデューサ1の第1の複数の素子E1~Enとを結ぶ複数の直線のうち関心領域R2Aを通る直線が占める割合は、反射点の位置に応じて変化するため、条件Y2が成立するか否かについてのステップS19における判定は、複数の反射点に対して異なる結果をもたらす場合がある。 Similarly, also in the second embodiment in which the total sound speed V1 and the local sound speed V2 are quantified using a plurality of reflection points, depending on the size of the region of interest R2A set by the region ofinterest setting unit 17, etc. The sound speed to be quantified can be selected from the overall sound speed V1 and the local sound speed V2.
Note that even if the reflection point is changed, the length in the scanning direction and the length in the depth direction of the region of interest R2A do not change. Therefore, the determination in step S16 as to whether or not the condition Y1 is satisfied is determined by a plurality of reflection points. Produces the same result. On the other hand, the ratio of the straight line passing through the region of interest R2A among the plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of thearray transducer 1 varies depending on the position of the reflection point. The determination in step S19 as to whether or not is true may give different results for a plurality of reflection points.
なお、反射点を変更しても、関心領域R2Aの走査方向の長さおよび深度方向の長さは変わらないので、条件Y1が成立するか否かについてのステップS16における判定は、複数の反射点に対して同一の結果になる。一方、反射点とアレイトランスデューサ1の第1の複数の素子E1~Enとを結ぶ複数の直線のうち関心領域R2Aを通る直線が占める割合は、反射点の位置に応じて変化するため、条件Y2が成立するか否かについてのステップS19における判定は、複数の反射点に対して異なる結果をもたらす場合がある。 Similarly, also in the second embodiment in which the total sound speed V1 and the local sound speed V2 are quantified using a plurality of reflection points, depending on the size of the region of interest R2A set by the region of
Note that even if the reflection point is changed, the length in the scanning direction and the length in the depth direction of the region of interest R2A do not change. Therefore, the determination in step S16 as to whether or not the condition Y1 is satisfied is determined by a plurality of reflection points. Produces the same result. On the other hand, the ratio of the straight line passing through the region of interest R2A among the plurality of straight lines connecting the reflection point and the first plurality of elements E1 to En of the
そこで、複数の反射点のうち、ステップS19における条件Y2が成立しない反射点、すなわち、アレイトランスデューサ1の第1の複数の素子E1~Enとの間を複数の直線で結んだ際に関心領域R2Aを通る直線が所定の割合(例えば、80%)以下となる反射点が存在する場合に、その反射点に対してステップS17の定量化処理100で定量化した全体音速V1を、関心領域R2A以外の領域R1Aの音速として採用することができる。
Therefore, among the plurality of reflection points, the region of interest R2A when the condition Y2 in step S19 is not satisfied, that is, when the first plurality of elements E1 to En of the array transducer 1 are connected by a plurality of straight lines. When there is a reflection point where the straight line passing through is a predetermined ratio (for example, 80%) or less, the total sound speed V1 quantified in the quantification process 100 in step S17 with respect to the reflection point other than the region of interest R2A It can be employed as the sound speed of the region R1A.
なお、ステップS16における条件Y1が成立するか否かの判定およびステップS19における条件Y2が成立するか否かの判定を制御部9が行ったが、これに限るものではなく、全体音速決定部23および局所音速決定部25がこれらの判定を行うように構成することもできる。
The control unit 9 determines whether or not the condition Y1 in step S16 is satisfied and whether or not the condition Y2 in step S19 is satisfied. However, the present invention is not limited to this. The local sound speed determination unit 25 can also be configured to make these determinations.
上記の実施の形態1~5では、アレイトランスデューサ1の第1の複数の素子E1~Enから出力されて受信回路3で増幅され且つデジタル化された素子データを用いて全体音速V1および局所音速V2を定量化したが、これに限るものではなく、デジタル化された後に位相整合された素子データを用いて全体音速V1および局所音速V2の定量化を行うこともできる。
In the first to fifth embodiments described above, the total sound speed V1 and the local sound speed V2 are output using the element data output from the first plurality of elements E1 to En of the array transducer 1, amplified by the receiving circuit 3, and digitized. However, the present invention is not limited to this, and the total sound velocity V1 and the local sound velocity V2 can also be quantified using element data that has been digitized and phase-matched.
1 アレイトランスデューサ、2 送信回路、3 受信回路、4 画像生成部、5 表示制御部、6 表示部、7 素子データメモリ、8,8A 音速定量化部、9 制御部、10 操作部、11 格納部、12 増幅部、13 AD変換部、14 信号処理部、15 DSC、16 画像処理部、17 関心領域設定部、21 時間差算出部、22 音速算出部、23 全体音速決定部、24 外れ領域特定部、25 局所音速決定部、A,Av,Aw 反射点、B 病変部、Cv、Cw 走査線、E1~En,Ec,Ei,Ek,Es,Et,Er 素子、Li,Lk,Lt,Lt1,Lt2,Lt3,Ls,Ls1,Ls2,Ls3 距離、V1 全体音速、V2 局所音速、Va,Vb 個別音速、R1 全体領域、R1A 関心領域以外の領域,R2 外れ領域、R2A 関心領域
1 array transducer, 2 transmission circuit, 3 reception circuit, 4 image generation unit, 5 display control unit, 6 display unit, 7 element data memory, 8, 8A sound velocity quantification unit, 9 control unit, 10 operation unit, 11 storage unit , 12 amplifying unit, 13 AD converting unit, 14 signal processing unit, 15 DSC, 16 image processing unit, 17 region of interest setting unit, 21 time difference calculating unit, 22 sound speed calculating unit, 23 overall sound speed determining unit, 24 off region specifying unit , 25 Local sound velocity determination unit, A, Av, Aw reflection point, B lesion, Cv, Cw scanning line, E1 to En, Ec, Ei, Ek, Es, Et, Er element, Li, Lk, Lt, Lt1, Lt2, Lt3, Ls, Ls1, Ls2, Ls3 distance, V1 overall sound speed, V2 local sound speed, Va, Vb individual sound speed, R1 overall area, R1A interest A region other than the frequency, R2 out area, R2A region of interest
Claims (14)
- 第1の複数の素子が配列されたアレイトランスデューサから被検体に向けて超音波ビームを送信し、被検体による超音波エコーを受信して超音波診断を行う超音波診断装置であって、
前記被検体内の反射点に向けた超音波ビームの送信に対応して前記反射点により反射される超音波エコーを受信した前記第1の複数の素子から出力される複数の素子データを保存する素子データメモリと、
前記第1の複数の素子のうちの1つの素子である参考用素子に対応する素子データと、前記第1の複数の素子のうち前記参考用素子以外の複数の素子である複数の測定用素子に対応する複数の素子データとの間の複数の時間差を算出する時間差算出部と、
前記反射点から前記参考用素子までの距離と、前記反射点から前記複数の測定用素子までの距離と、前記時間差算出部により算出された前記複数の時間差に基づいて、前記複数の測定用素子に対応する複数の個別音速をそれぞれ算出する音速算出部と、
前記音速算出部により算出された前記複数の個別音速に基づいて全体音速を決定する全体音速決定部と
を備える超音波診断装置。 An ultrasonic diagnostic apparatus that transmits an ultrasonic beam toward an object from an array transducer in which a plurality of first elements are arranged, receives an ultrasonic echo from the object, and performs an ultrasonic diagnosis,
A plurality of element data output from the first plurality of elements that have received an ultrasonic echo reflected by the reflection point in response to transmission of an ultrasonic beam toward the reflection point in the subject are stored. Element data memory;
Element data corresponding to a reference element that is one element of the first plurality of elements, and a plurality of measurement elements that are a plurality of elements other than the reference element among the first plurality of elements A time difference calculation unit for calculating a plurality of time differences between a plurality of element data corresponding to
The plurality of measurement elements based on the distance from the reflection point to the reference element, the distance from the reflection point to the plurality of measurement elements, and the plurality of time differences calculated by the time difference calculation unit A sound speed calculation unit for calculating a plurality of individual sound speeds corresponding to
An ultrasonic diagnostic apparatus comprising: an overall sound speed determination unit that determines an overall sound speed based on the plurality of individual sound speeds calculated by the sound speed calculation unit. - 前記音速算出部により算出された前記複数の個別音速の中に、前記全体音速決定部により決定された前記全体音速との差分の絶対値が速度しきい値を越える個別音速が存在するか否かを判定し、差分の絶対値が前記速度しきい値を越える個別音速に対応する素子と前記反射点との間の領域を外れ領域として特定する外れ領域特定部を備えた請求項1に記載の超音波診断装置。 Whether or not there is an individual sound speed in which the absolute value of the difference from the overall sound speed determined by the overall sound speed determination section exceeds a speed threshold value among the plurality of individual sound speeds calculated by the sound speed calculation section And an outlier specifying unit that specifies an area between the element corresponding to the individual sound speed at which the absolute value of the difference exceeds the velocity threshold and the reflection point as an outlier. Ultrasonic diagnostic equipment.
- 前記反射点から前記外れ領域を通る前記超音波エコーを受信した2つ以上の素子までの距離と、前記2つ以上の素子に対して前記時間差算出部により算出された前記時間差と、に基づいて前記音速算出部により算出された少なくとも1つの個別音速から、前記外れ領域内における局所音速を決定する局所音速決定部を備えた請求項2に記載の超音波診断装置。 Based on the distance from the reflection point to the two or more elements that have received the ultrasonic echo passing through the outlier, and the time difference calculated by the time difference calculation unit for the two or more elements. The ultrasonic diagnostic apparatus according to claim 2, further comprising a local sound speed determining unit that determines a local sound speed in the outlier region from at least one individual sound speed calculated by the sound speed calculating unit.
- 前記第1の複数の素子から出力される前記複数の素子データに基づいて超音波画像を生成する画像生成部と、
前記超音波画像上に関心領域を設定するための関心領域設定部と
を備え、
前記時間差算出部は、前記第1の複数の素子のうち前記関心領域以外の領域を通る前記超音波エコーを受信した第2の複数の素子のうちの1つの素子を前記参考用素子、前記第2の複数の素子のうち前記参考用素子以外の素子を前記測定用素子として前記複数の時間差を算出する請求項1に記載の超音波診断装置。 An image generation unit that generates an ultrasound image based on the plurality of element data output from the first plurality of elements;
A region-of-interest setting unit for setting a region of interest on the ultrasound image,
The time difference calculator is configured to change one element of the second plurality of elements that has received the ultrasonic echo passing through a region other than the region of interest among the first plurality of elements, the reference element, The ultrasonic diagnostic apparatus according to claim 1, wherein the plurality of time differences are calculated using an element other than the reference element among the plurality of elements as the measurement element. - 前記反射点から前記関心領域を通る前記超音波エコーを受信した2つ以上の素子までの距離と、前記2つ以上の素子に対して前記時間差算出部により算出された前記時間差と、に基づいて前記音速算出部により算出された少なくとも1つの個別音速から、前記関心領域内における局所音速を決定する局所音速決定部を備えた請求項4に記載の超音波診断装置。 Based on the distance from the reflection point to two or more elements that have received the ultrasonic echo passing through the region of interest, and the time difference calculated by the time difference calculation unit for the two or more elements The ultrasonic diagnostic apparatus according to claim 4, further comprising a local sound speed determination unit that determines a local sound speed in the region of interest from at least one individual sound speed calculated by the sound speed calculation unit.
- 前記全体音速決定部は、前記関心領域設定部により設定された前記関心領域の走査方向の長さおよび深度方向の長さの少なくとも一方が設定値以下の場合、および、前記関心領域設定部により設定された前記関心領域の走査方向の長さおよび深度方向の長さがいずれも前記設定値より大きく且つ前記反射点と前記第1の複数の素子とを結ぶ複数の直線のうち前記関心領域を通る直線が所定の割合以下の場合にのみ前記全体音速を決定する請求項5に記載の超音波診断装置。 The total sound speed determination unit is set by the region of interest setting unit when at least one of the length in the scanning direction and the length in the depth direction of the region of interest set by the region of interest setting unit is a set value or less. The length of the region of interest in the scanning direction and the length of the depth direction are both larger than the set value and pass through the region of interest among a plurality of straight lines connecting the reflection point and the first plurality of elements. The ultrasonic diagnostic apparatus according to claim 5, wherein the overall sound velocity is determined only when a straight line is equal to or less than a predetermined ratio.
- 前記局所音速決定部は、前記関心領域設定部により設定された前記関心領域の走査方向の長さおよび深度方向の長さがいずれも前記設定値より大きい場合にのみ前記局所音速を決定する請求項6に記載の超音波診断装置。 The local sound speed determination unit determines the local sound speed only when the length in the scanning direction and the length in the depth direction of the region of interest set by the region of interest setting unit are both larger than the set value. 6. The ultrasonic diagnostic apparatus according to 6.
- 前記関心領域設定部は、ユーザの指定により前記関心領域を設定する請求項4~7のいずれか一項に記載の超音波診断装置。 The ultrasonic diagnostic apparatus according to any one of claims 4 to 7, wherein the region-of-interest setting unit sets the region of interest according to a user designation.
- 前記関心領域設定部は、前記超音波画像を画像解析することにより自動的に前記関心領域を設定する請求項4~7のいずれか一項に記載の超音波診断装置。 The ultrasonic diagnostic apparatus according to any one of claims 4 to 7, wherein the region-of-interest setting unit automatically sets the region of interest by performing image analysis on the ultrasonic image.
- 前記素子データメモリは、互いに異なる走査線上に位置する複数の反射点に向けて超音波ビームを送信することにより前記複数の反射点に対してそれぞれ前記第1の複数の素子から出力される複数の素子データを保存し、
前記時間差算出部は、前記複数の反射点に対してそれぞれ前記複数の時間差を算出し、
前記音速算出部は、前記複数の反射点に対してそれぞれ前記複数の個別音速を算出し、
前記全体音速決定部は、前記音速算出部により前記複数の反射点に対してそれぞれ算出された前記複数の個別音速に基づいて前記全体音速を決定する請求項3に記載の超音波診断装置。 The element data memory is configured to transmit a plurality of output points from the first plurality of elements to the plurality of reflection points by transmitting an ultrasonic beam toward the plurality of reflection points located on different scanning lines. Save element data,
The time difference calculation unit calculates the plurality of time differences for each of the plurality of reflection points,
The sound speed calculating unit calculates the plurality of individual sound speeds for the plurality of reflection points,
The ultrasonic diagnostic apparatus according to claim 3, wherein the overall sound speed determination unit determines the overall sound speed based on the plurality of individual sound speeds respectively calculated for the plurality of reflection points by the sound speed calculation unit. - 前記局所音速決定部は、前記複数の反射点の各々から前記外れ領域を通る前記超音波エコーを受信した2つ以上の素子までの距離と、前記複数の反射点の各々と前記2つ以上の素子に対して前記時間差算出部により算出された複数の時間差と、に基づいて前記音速算出部により算出された複数の音速から、前記外れ領域内における局所音速を決定する請求項10に記載の超音波診断装置。 The local sound speed determination unit includes a distance from each of the plurality of reflection points to two or more elements that have received the ultrasonic echo passing through the outlier region, each of the plurality of reflection points, and the two or more of the plurality of reflection points. The supersonic wave according to claim 10, wherein a local sound speed in the outlier region is determined from a plurality of sound speeds calculated by the sound speed calculating part based on a plurality of time differences calculated by the time difference calculating part with respect to an element. Ultrasonic diagnostic equipment.
- 前記素子データメモリは、互いに異なる走査線上に位置する複数の反射点に向けて超音波ビームを送信することにより前記複数の反射点に対してそれぞれ前記第2の複数の素子から出力される複数の素子データを保存し、
前記時間差算出部は、前記複数の反射点に対してそれぞれ前記複数の時間差を算出し、
前記音速算出部は、前記複数の反射点に対してそれぞれ前記複数の個別音速を算出し、
前記全体音速決定部は、前記音速算出部により前記複数の反射点に対してそれぞれ算出された前記複数の個別音速に基づいて前記全体音速を決定する請求項5~7のいずれか一項に記載の超音波診断装置。 The element data memory is configured to transmit a plurality of output points from the second plurality of elements to the plurality of reflection points by transmitting an ultrasonic beam toward the plurality of reflection points located on different scanning lines. Save element data,
The time difference calculation unit calculates the plurality of time differences for each of the plurality of reflection points,
The sound speed calculating unit calculates the plurality of individual sound speeds for the plurality of reflection points,
The total sound speed determination unit determines the total sound speed based on the plurality of individual sound speeds calculated for the plurality of reflection points by the sound speed calculation unit, respectively. Ultrasound diagnostic equipment. - 前記局所音速決定部は、前記複数の反射点の各々から前記関心領域を通る前記超音波エコーを受信した2つ以上の素子までの距離と、前記複数の反射点の各々と前記2つ以上の素子に対して前記時間差算出部により算出された複数の時間差と、に基づいて前記音速算出部により算出された複数の音速から、前記関心領域内における局所音速を決定する請求項12に記載の超音波診断装置。 The local sound speed determination unit includes a distance from each of the plurality of reflection points to two or more elements that have received the ultrasonic echo passing through the region of interest, each of the plurality of reflection points, and the two or more of the plurality of reflection points. The supersonic wave according to claim 12, wherein a local sound speed in the region of interest is determined from a plurality of sound speeds calculated by the sound speed calculating part based on a plurality of time differences calculated by the time difference calculating part with respect to an element. Ultrasonic diagnostic equipment.
- 被検体内の反射点に向けた超音波ビームの送信に対応して前記反射点により反射される超音波エコーを受信したアレイトランスデューサの第1の複数の素子から出力される複数の素子データを保存し、
前記第1の複数の素子のうちの1つの素子である参考用素子に対応する素子データと、前記第1の複数の素子のうち前記参考用素子以外の複数の素子である複数の測定用素子に対応する複数の素子データとの間の複数の時間差を算出し、
前記反射点から前記参考用素子までの距離と、前記反射点から前記複数の測定用素子までの距離と、算出された前記複数の時間差に基づいて、前記複数の測定用素子に対応する複数の個別音速をそれぞれ算出し、
算出された前記複数の個別音速に基づいて全体音速を決定する音速定量化方法。 A plurality of element data output from the first plurality of elements of the array transducer that has received the ultrasonic echo reflected by the reflection point corresponding to the transmission of the ultrasonic beam toward the reflection point in the subject is stored. And
Element data corresponding to a reference element that is one element of the first plurality of elements, and a plurality of measurement elements that are a plurality of elements other than the reference element among the first plurality of elements Calculate multiple time differences between multiple element data corresponding to
Based on the distance from the reflection point to the reference element, the distance from the reflection point to the plurality of measurement elements, and the calculated time differences, a plurality of measurement elements corresponding to the plurality of measurement elements. Calculate individual sound speeds,
A sound speed quantification method for determining an overall sound speed based on the calculated individual sound speeds.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016011045 | 2016-01-22 | ||
| JP2016-011045 | 2016-01-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017126209A1 true WO2017126209A1 (en) | 2017-07-27 |
Family
ID=59361583
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/084124 WO2017126209A1 (en) | 2016-01-22 | 2016-11-17 | Ultrasonic diagnostic device and sound velocity quantification method |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2017126209A1 (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06105841A (en) * | 1991-06-04 | 1994-04-19 | Yokogawa Medical Syst Ltd | Ultrasonic diagnostic apparatus |
| JP2011092686A (en) * | 2009-09-30 | 2011-05-12 | Fujifilm Corp | Ultrasound diagnostic apparatus and signal processing method thereof |
| JP2012200386A (en) * | 2011-03-25 | 2012-10-22 | Panasonic Corp | Ultrasonic diagnostic apparatus |
| JP2013244159A (en) * | 2012-05-25 | 2013-12-09 | Fujifilm Corp | Ultrasonic diagnostic equipment and method for estimating sound velocity |
| JP2014064856A (en) * | 2012-09-27 | 2014-04-17 | Fujifilm Corp | Ultrasonic examination apparatus, signal processing method of ultrasonic examination apparatus and program |
| JP2014233601A (en) * | 2013-06-05 | 2014-12-15 | 富士フイルム株式会社 | Ultrasonic diagnostic apparatus, and ultrasonic diagnostic method and program |
-
2016
- 2016-11-17 WO PCT/JP2016/084124 patent/WO2017126209A1/en active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06105841A (en) * | 1991-06-04 | 1994-04-19 | Yokogawa Medical Syst Ltd | Ultrasonic diagnostic apparatus |
| JP2011092686A (en) * | 2009-09-30 | 2011-05-12 | Fujifilm Corp | Ultrasound diagnostic apparatus and signal processing method thereof |
| JP2012200386A (en) * | 2011-03-25 | 2012-10-22 | Panasonic Corp | Ultrasonic diagnostic apparatus |
| JP2013244159A (en) * | 2012-05-25 | 2013-12-09 | Fujifilm Corp | Ultrasonic diagnostic equipment and method for estimating sound velocity |
| JP2014064856A (en) * | 2012-09-27 | 2014-04-17 | Fujifilm Corp | Ultrasonic examination apparatus, signal processing method of ultrasonic examination apparatus and program |
| JP2014233601A (en) * | 2013-06-05 | 2014-12-15 | 富士フイルム株式会社 | Ultrasonic diagnostic apparatus, and ultrasonic diagnostic method and program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020044769A1 (en) | Ultrasound diagnosis device and ultrasound diagnosis device control method | |
| JP5400015B2 (en) | Ultrasonic diagnostic apparatus and its operating method | |
| US9310472B2 (en) | Focal point information determination method and apparatus, and ambient sound velocity obtaining method and apparatus | |
| JP7476376B2 (en) | ULTRASONIC DIAGNOSTIC APPARATUS, CONTROL METHOD FOR ULTRASONIC DIAGNOSTIC APPARATUS, AND PROCESSOR FOR ULTRASONIC DIAGNOSTIC APPARATUS | |
| WO2019187649A1 (en) | Ultrasonic diagnostic device and method for controlling ultrasonic diagnostic device | |
| JP5588924B2 (en) | Ultrasonic diagnostic equipment | |
| JP2023155494A (en) | Ultrasonic diagnostic device | |
| JP5663552B2 (en) | Ultrasonic inspection apparatus, signal processing method and program for ultrasonic inspection apparatus | |
| JP5281107B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic image generation method | |
| JP5844175B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic image generation method | |
| US11116481B2 (en) | Ultrasound diagnostic apparatus and control method of ultrasound diagnostic apparatus | |
| WO2020110500A1 (en) | Ultrasonic diagnostic device and method for controlling ultrasonic diagnostic device | |
| WO2019163225A1 (en) | Ultrasonic diagnostic device and method of controlling ultrasonic diagnostic device | |
| JP5869411B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic image generation method | |
| JP5829198B2 (en) | Ultrasonic inspection apparatus, signal processing method and program for ultrasonic inspection apparatus | |
| WO2014050889A1 (en) | Ultrasonic inspection device, signal processing method for ultrasonic inspection device, and program | |
| WO2017122411A1 (en) | Ultrasonic diagnostic device and sonic speed quantification method | |
| WO2017126209A1 (en) | Ultrasonic diagnostic device and sound velocity quantification method | |
| WO2019187647A1 (en) | Ultrasonic diagnostic device and control method for ultrasonic diagnostic device | |
| WO2017122414A1 (en) | Ultrasonic diagnostic device and sonic speed quantification method | |
| WO2020213562A1 (en) | Ultrasound diagnostic device, method for controlling ultrasound diagnostic device, and processor for ultrasound diagnostic device | |
| JP2014124220A (en) | Ultrasound diagnostic apparatus, tissue elasticity measurement method, and program | |
| JP5247844B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic image generation method | |
| JP5296824B2 (en) | Ultrasonic diagnostic equipment | |
| JP5917388B2 (en) | Ultrasonic inspection apparatus, signal processing method and program for ultrasonic inspection apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16886448 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16886448 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |