WO2011122659A1 - Encoder apparatus and decoder apparatus - Google Patents
Encoder apparatus and decoder apparatus Download PDFInfo
- Publication number
- WO2011122659A1 WO2011122659A1 PCT/JP2011/058008 JP2011058008W WO2011122659A1 WO 2011122659 A1 WO2011122659 A1 WO 2011122659A1 JP 2011058008 W JP2011058008 W JP 2011058008W WO 2011122659 A1 WO2011122659 A1 WO 2011122659A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- skip
- parameter
- value
- decoding
- prediction
- Prior art date
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
Abstract
A moving image decoder apparatus comprises: a block scan unit (141a) for classifying blocks into non-skip blocks in each of which a code obtained by encoding a parameter related to the block is included in encoded data (#13) and skip blocks in each of which that code is not included in the encoded data (#13); an mv decoding unit (141e) for setting a motion vector (mv) related to each non-skip block to a value obtained by decoding the corresponding code included in the encoded data (#13); and a skip mv estimating unit (141f) for deriving the mv related to each skip block with reference to the value of a parameter set by the mv decoding unit (141e) that is the value of a parameter related to the non-skip blocks preceding and following in the raster scan order.
Description
本発明は、画像を符号化し符号化データを生成する符号化装置に関する。また、そのような符号化装置を用いて生成された符号化データを復号する復号装置に関する。
The present invention relates to an encoding device that encodes an image and generates encoded data. The present invention also relates to a decoding apparatus that decodes encoded data generated using such an encoding apparatus.
動画像を効率的に伝送または記録するために、動画像符号化装置が用いられている。具体的な動画像符号化方式としては、例えば、H.264/MPEG-4 AVC(以下、H264/AVCと略記)(非特許文献1)、および、VCEG(Video Coding Expert Group)における共同開発用コーデックであるKTAソフトウェアに採用されている方式などが挙げられる。
In order to efficiently transmit or record moving images, a moving image encoding device is used. As a specific moving picture encoding method, for example, H.264 is used. H.264 / MPEG-4 AVC (hereinafter abbreviated as H264 / AVC) (Non-Patent Document 1) and VCEG (Video Coding Expert Group), a system adopted by KTA software that is a codec for joint development .
このような符号化方式において、動画像を構成する画像(ピクチャ)は、普通、画像を分割することにより得られるスライス、スライスを分割することにより得られるマクロブロック、マクロブロックを分割することにより得られるサブマクロブロック、及び、マクロブロックまたはサブマクロブロックを分割することにより得られるブロックからなる階層構造により管理される。
In such an encoding method, an image (picture) constituting a moving image is usually obtained by dividing a slice obtained by dividing an image, a macroblock obtained by dividing the slice, and a macroblock. Are managed by a hierarchical structure including sub-macroblocks to be obtained and blocks obtained by dividing macroblocks or sub-macroblocks.
また、このような符号化方式においては、通常、入力画像を符号化/復号化することによって得られる局所復号画像に基づいて予測画像が生成され、当該予測画像と入力画像との差分画像が符号化される。また、予測画像の生成方法としては、フレーム間予測(インター予測)、および、フレーム内予測(イントラ予測)と呼ばれる方法が知られている。
In such an encoding method, a prediction image is usually generated based on a local decoded image obtained by encoding / decoding an input image, and a difference image between the prediction image and the input image is encoded. It becomes. As methods for generating a predicted image, methods called inter-frame prediction (inter prediction) and intra-frame prediction (intra prediction) are known.
インター予測においては、符号化中のフレームに対する予測画像を、符号化/復号化済のフレームにおける参照画像からの動き補償予測によって生成する。H.264/AVCにおいては、どのフレームからの動き補償予測を行うかなど、予測方法に各種自由度が設けられており、動きベクトル(より正確には、動きベクトルの予測残差)の他に、各マクロブロック(または、各サブマクロブロック)においてどの予測方法を用いて動き補償予測を行ったかを示す予測パラメータが符号化される。
In inter prediction, a prediction image for a frame being encoded is generated by motion compensation prediction from a reference image in a frame that has been encoded / decoded. H. In H.264 / AVC, various degrees of freedom are provided in the prediction method, such as from which frame motion compensation prediction is performed. In addition to motion vectors (more precisely, prediction residuals of motion vectors), A prediction parameter indicating which prediction method is used to perform motion compensation prediction in a macroblock (or each sub-macroblock) is encoded.
一方、イントラ予測においては、符号化中のフレームに含まれる符号化中のマクロブロック(または、サブマクロブロック)上の予測画像を、同じフレームに含まれる符号化/復号化済の領域上の局所復号画像からの外挿等により生成する。H.264/AVCにおいては、どの方向からの外挿を行うかなど、予測方法(予測モード)に各種自由度が設けられており、各ブロックにおいてどの予測方法(予測モード)を用いて予測を行ったかを示す予測パラメータが符号化される。
On the other hand, in intra prediction, a prediction image on a macroblock (or sub-macroblock) being encoded included in a frame being encoded is converted into a local area on an encoded / decoded region included in the same frame. Generated by extrapolation from the decoded image. H. In H.264 / AVC, various degrees of freedom are provided in the prediction method (prediction mode), such as from which direction the extrapolation is performed, and which prediction method (prediction mode) is used for each block. A prediction parameter indicating is encoded.
このように、動画像符号化装置において生成された符号化データを参照して、動画像復号装置において入力画像を正しく再現するためには、予測画像を生成するために用いた予測方法を示す予測パラメータを符号化して符号化データに含める必要がある。このため、符号化データの符号量が増大するという問題が生じる。
As described above, in order to correctly reproduce the input image in the moving image decoding apparatus with reference to the encoded data generated in the moving image encoding apparatus, the prediction indicating the prediction method used to generate the predicted image The parameters need to be encoded and included in the encoded data. This causes a problem that the amount of encoded data increases.
このような問題に鑑みて、H.264/AVCにおいては、特定のマクロブロックやサブマクロブロックに関する予測パラメータの符号化を省略することによって、符号化データの符号量を小さくする技術が採用されている。ここで、予測パラメータの符号化が省略されるマクロブロックやサブマクロブロックはスキップブロックと呼ばれ、予測パラメータが符号化されるマクロブロックやサブマクロブロックは非スキップブロックと呼ばれる。スキップブロックの復号に際しては、非スキップブロックに関する予測パラメータの値を参照して導出された、そのスキップブロックに関する予測パラメータの推定値が用いられる。
In view of these problems, H.C. In H.264 / AVC, a technique for reducing the code amount of encoded data by omitting encoding of a prediction parameter for a specific macroblock or sub-macroblock is employed. Here, macroblocks and sub-macroblocks for which encoding of prediction parameters is omitted are called skip blocks, and macroblocks and sub-macroblocks for which prediction parameters are encoded are called non-skip blocks. When decoding a skip block, an estimated value of a prediction parameter related to the skip block, which is derived with reference to a prediction parameter value related to a non-skip block, is used.
しかしながら、上記従来の構成では、予測パラメータによる符号化データの符号量を削減できるものの、符号化データ全体の符号量を十分に削減できないという問題がある。このことについて、表1および図10を参照しながら、以下に具体的に説明する。
However, although the conventional configuration described above can reduce the code amount of the encoded data based on the prediction parameter, there is a problem that the code amount of the entire encoded data cannot be sufficiently reduced. This will be specifically described below with reference to Table 1 and FIG.

表1は、スキップブロックの型(タイプ)を例示した表である。表1において、sp、dsp、dtpは、それぞれ、sp:空間的予測(spatial pred)、dsp:空間ダイレクトモードによる予測(direct spatial pred)、dtp:時間ダイレクトモードによる予測(direct temporal pred)を表わしている。
Table 1 is a table exemplifying skip block types. In Table 1, sp, dsp, and dtp represent sp: spatial prediction (spatial pred), dsp: prediction in spatial direct mode (direct spatial pred), and dtp: prediction in temporal direct mode (direct temporal pred), respectively. ing.
型名が表1のB_Direct_8x8であるスキップブロックを含むマクロブロックの復号処理について、図10を参照しながら説明する。
Decoding processing of a macroblock including a skip block whose type name is B_Direct_8x8 in Table 1 will be described with reference to FIG.
図10(a)は、マクロブロックMBに含まれる各サブマクロブロック(SMB1~4)に関する動きベクトルを導出する処理を概略的に示した図である。また、図10(b)は、スキップブロックに関する動きベクトル(mv)を推定するために参照されるブロックの位置を示した図である。なお、図10(a)(b)において、SMB2およびSMB3がB_Direct_8x8のサブマクロブロックである。
FIG. 10A is a diagram schematically showing a process for deriving a motion vector regarding each sub macroblock (SMB1 to SMB4) included in the macroblock MB. FIG. 10B is a diagram showing the positions of blocks that are referred to in order to estimate the motion vector (mv) related to the skip block. In FIGS. 10A and 10B, SMB2 and SMB3 are B_Direct_8x8 sub-macroblocks.
図10(a)に示すように、従来の構成では、スキップブロックに関する動きベクトルを推定するために、符号化中のマクロブロックに隣接する符号化済のマクロブロックに含まれるブロックに関する動きベクトルが参照される。具体的には、図10(b)に示すように、符号化中のマクロブロック内の左上隅に位置するサブマクロブロック(SMB1)の左、上、および右上に隣接するブロックに関する動きベクトルが参照される。
As shown in FIG. 10A, in the conventional configuration, in order to estimate the motion vector related to the skip block, the motion vector related to the block included in the encoded macro block adjacent to the macro block being encoded is referred to. Is done. Specifically, as shown in FIG. 10 (b), reference is made to motion vectors relating to blocks adjacent to the left, top, and top right of the sub-macroblock (SMB1) located at the top left corner in the macroblock being encoded. Is done.
すなわち、従来の構成では、スキップブロックに関する予測パラメータを推定するために、そのスキップブロックの右や下に隣接するブロックに関する予測パラメータを参照していないため、予測パラメータの推定精度が低下することがあった。予測パラメータの推定精度が低下すると、符号化すべき予測パラメータの予測残差が大きくなり、符号量が増大するという問題を生じる。
That is, in the conventional configuration, in order to estimate the prediction parameter related to the skip block, the prediction parameter related to the block adjacent to the right or bottom of the skip block is not referred to. It was. When the estimation accuracy of the prediction parameter decreases, the prediction residual of the prediction parameter to be encoded becomes large, resulting in a problem that the code amount increases.
本発明は、上記の問題に鑑みてなされたものであり、その主な目的は、スキップブロック(より一般にはスキップ領域)に関する予測パラメータ(より一般にはパラメータ)を精度よく推定可能な符号化装置および復号装置を実現することにある。
The present invention has been made in view of the above problems, and its main object is to provide an encoding device capable of accurately estimating a prediction parameter (more generally a parameter) related to a skip block (more generally a skip region), and It is to realize a decoding device.
本発明に係る復号装置は、上記課題を解決するために、符号化データを復号することによって、復号画像を構成する各単位領域に関するパラメータを設定する復号装置において、上記復号画像を構成する各単位領域を、該単位領域に関するパラメータを符号化することにより得られる符号が上記符号化データに含まれている非スキップ領域と、該単位領域に関するパラメータを符号化することにより得られる符号が上記符号化データに含まれていないスキップ領域とに分類する分類手段と、上記復号画像に含まれる各非スキップ領域に関するパラメータを、上記符号化データに含まれている対応する符号を復号して得られた値に設定する復号手段と、上記復号画像に含まれる各スキップ領域に関するパラメータを、上記復号手段により設定された非スキップ領域に関するパラメータの値であって、予め規定された復号順序において当該スキップ領域の前後に位置する非スキップ領域に関するパラメータの値を参照して導出した推定値に設定する導出手段と、を備えている、ことを特徴としている。
In order to solve the above problems, a decoding device according to the present invention decodes encoded data to set parameters relating to each unit region constituting a decoded image, and each unit constituting the decoded image A non-skip area in which the code obtained by encoding the parameter relating to the unit area is included in the encoded data, and the code obtained by encoding the parameter relating to the unit area Classification means for classifying into skip areas not included in the data, and parameters obtained by decoding the corresponding codes included in the encoded data with respect to the parameters regarding each non-skip area included in the decoded image The decoding means to be set to and parameters related to each skip area included in the decoded image are set by the decoding means. Derivation means for setting the estimated value derived by referring to the value of the parameter relating to the non-skip area located before and after the skip area in a predetermined decoding order, the parameter value relating to the non-skip area, It is characterized by having.
上記の構成によれば、本発明の復号装置は、スキップ領域に関するパラメータの推定値を、予め規定された復号順序がそのスキップ領域よりも後の非スキップ領域に関するパラメータの値とそのスキップ領域よりも前の非スキップ領域に関するパラメータの値との両方を参照して導出する。
According to the above configuration, the decoding apparatus of the present invention determines the estimated value of the parameter related to the skip area from the parameter value related to the non-skip area after the predetermined decoding order and the skip area. Derived with reference to both the value of the parameter for the previous non-skip area.
一方、従来の復号装置は、スキップ領域に関するパラメータの推定値を、予め規定された復号順序がそのスキップ領域よりも前の非スキップ領域に関するパラメータの値のみを参照して導出する。すなわち、従来の復号装置においては、スキップ領域に関するパラメータの推定値を導出するために、予め規定された復号順序がそのスキップ領域よりも後の非スキップ領域に関するパラメータの値が参照されることはない。例えば、H.264/AVCの方式においては、スキップブロックの動きベクトルを導出するために、そのスキップブロックの右や下に位置する非スキップブロック(すなわち、ラスタスキャン順で後ろに位置する非スキップブロック)の動きベクトルが参照されることはない。
On the other hand, a conventional decoding device derives an estimated value of a parameter related to a skip region with reference to only a parameter value related to a non-skip region in which a predetermined decoding order is earlier than the skip region. In other words, in the conventional decoding device, in order to derive the estimated value of the parameter related to the skip region, the parameter value related to the non-skip region after the predetermined decoding order is not referred to. . For example, H.M. In the H.264 / AVC system, in order to derive a motion vector of a skip block, a motion vector of a non-skip block located to the right or below the skip block (that is, a non-skip block located behind in the raster scan order) Is never referenced.
したがって、本発明の復号装置によれば、スキップ領域に関するパラメータの推定精度を従来と比べて統計的に向上させることができる。
Therefore, according to the decoding apparatus of the present invention, it is possible to statistically improve the estimation accuracy of the parameter relating to the skip region as compared with the conventional case.
なお、上記単位領域は、非特許文献1等に規定されている公知の単位であってもよいし、非特許文献1等に規定されていない新規な単位であってもよい。前者の場合、上記単位領域としては、「サブマクロブロック」が代表的であるがこれに限定されるものではない。例えば、サブマクロブロックよりも小さい単位(例えば、ブロック)であってもよいし、サブマクロブロックよりも大きい単位(例えば、マクロブロック)であってもよい。
Note that the unit region may be a known unit defined in Non-Patent Document 1 or the like, or a new unit not defined in Non-Patent Document 1 or the like. In the former case, the unit area is typically “sub-macroblock”, but is not limited thereto. For example, a unit (for example, a block) smaller than the sub macroblock may be used, or a unit (for example, a macroblock) larger than the sub macroblock may be used.
本発明に係る符号化装置では、上記課題を解決するために、画像を構成する各単位領域に関するパラメータを符号化して符号化データとして出力する符号化装置において、上記画像を構成する各単位領域を、該単位領域に関するパラメータを符号化することにより得られる符号を上記符号化データに含める非スキップ領域と、該単位領域に関するパラメータを符号化することにより得られる符号を上記符号化データに含めないスキップ領域とに分類する分類手段と、上記画像に含まれる各非スキップ領域に関するパラメータを、予め規定された符号化順序が当該非スキップ領域よりも前の非スキップ領域に関するパラメータの値を参照して生成する生成手段と、上記画像に含まれる各スキップ領域に関するパラメータを、上記生成手段により生成されたスキップ領域に関するパラメータの値であって、予め規定された符号化順序において当該スキップ領域の前後に位置する非スキップ領域に関するパラメータの値を参照して導出した推定値に設定する導出手段と、を備えている、ことを特徴としている。
In the encoding device according to the present invention, in order to solve the above-described problem, in the encoding device that encodes the parameters related to the unit regions constituting the image and outputs them as encoded data, the unit regions constituting the image are A non-skip area in which the code obtained by encoding the parameter relating to the unit area is included in the encoded data, and a skip in which the code obtained by encoding the parameter relating to the unit area is not included in the encoded data Classifying means for classifying into regions and parameters relating to each non-skip region included in the image are generated with reference to the parameter values relating to non-skip regions whose pre-defined encoding order is earlier than the non-skip region. Generating means, and parameters relating to each skip region included in the image by the generating means. Derivation means for setting a parameter value relating to the generated skip region to an estimated value derived by referring to a parameter value relating to a non-skip region located before and after the skip region in a predetermined encoding order; It is characterized by having.
上記の構成によれば、本発明の符号化装置は、スキップ領域に関するパラメータの推定値を、予め規定された符号化順序がそのスキップ領域よりも後の非スキップ領域に関するパラメータの値を参照して導出する。
According to the above configuration, the encoding apparatus of the present invention refers to the estimated value of the parameter related to the skip region with reference to the value of the parameter related to the non-skip region after the predetermined encoding order after the skip region. To derive.
一方、従来の符号化装置は、スキップ領域に関するパラメータの推定値を、予め規定された符号化順序がそのスキップ領域よりも前の非スキップ領域に関するパラメータの値を参照して導出する。すなわち、従来の符号化装置においては、スキップ領域に関するパラメータの推定値を導出するために、予め規定された符号化順序がそのスキップ領域よりも後の非スキップ領域に関するパラメータの値が参照されることはない。例えば、H.264/AVCの方式においては、スキップブロックの動きベクトルを導出するために、そのスキップブロックの右や下に位置する非スキップブロックの動きベクトルが参照されることはない。
On the other hand, the conventional coding apparatus derives an estimated value of a parameter related to a skip region with reference to the value of a parameter related to a non-skip region whose coding order defined in advance is earlier than that skip region. That is, in the conventional coding apparatus, in order to derive an estimated value of a parameter relating to a skip region, a parameter value relating to a non-skip region after the predetermined coding order is referred to after the skip region. There is no. For example, H.M. In the H.264 / AVC system, in order to derive a motion vector of a skip block, a motion vector of a non-skip block positioned to the right or below the skip block is not referred to.
したがって、本発明の符号化装置によれば、スキップ領域に関するパラメータの推定精度を従来と比べて統計的に向上させることができる。
Therefore, according to the encoding apparatus of the present invention, it is possible to statistically improve the parameter estimation accuracy related to the skip region compared to the conventional case.
以上のように、本発明に係る符号化装置および復号装置は、スキップブロック(より一般にはスキップ領域)に関する予測パラメータ(より一般にはパラメータ)を精度よく推定することができる。
As described above, the encoding device and the decoding device according to the present invention can accurately estimate a prediction parameter (more generally a parameter) related to a skip block (more generally a skip region).
(動画像復号装置)
実施形態に係る動画像復号装置(復号装置)1の構成について、図1~図6を参照して説明する。動画像復号装置1は、その一部に、H.264/MPEG-4 AVC規格に採用されている技術を用いている動画像復号装置である。 (Video decoding device)
A configuration of a moving image decoding apparatus (decoding apparatus) 1 according to the embodiment will be described with reference to FIGS. The movingpicture decoding apparatus 1 includes H.264 as a part thereof. This is a moving picture decoding apparatus using a technique adopted in the H.264 / MPEG-4 AVC standard.
実施形態に係る動画像復号装置(復号装置)1の構成について、図1~図6を参照して説明する。動画像復号装置1は、その一部に、H.264/MPEG-4 AVC規格に採用されている技術を用いている動画像復号装置である。 (Video decoding device)
A configuration of a moving image decoding apparatus (decoding apparatus) 1 according to the embodiment will be described with reference to FIGS. The moving
動画像復号装置1は、概略的に言えば、入力される符号化データ#1を復号することによって復号画像#2を生成し、出力する装置である。
Schematically speaking, the moving picture decoding apparatus 1 is an apparatus that generates and outputs a decoded image # 2 by decoding input encoded data # 1.
また、動画像復号装置1は、符号化データ#1の示す画像上のある領域(部分領域)を複数の予測対象領域(単位領域)に分割し、当該予測対象領域毎に生成された予測画像を用いて、復号画像#2を生成する。
In addition, the moving image decoding apparatus 1 divides a certain region (partial region) on the image indicated by the encoded data # 1 into a plurality of prediction target regions (unit regions), and a prediction image generated for each prediction target region Is used to generate decoded image # 2.
以下では、上記ある領域を、H.264/MPEG-4 AVC規格におけるマクロブロックとし、上記予測対象領域を、マクロブロック内のブロックとした場合を例に挙げ、説明を行うが、本発明は、これに限定されるものではない。例えば、上記ある単位領域は、マクロブロックよりも大きな領域としてもよいし、マクロブロックより小さな領域としてもよい。また、上記予測対象領域も、ブロックよりも大きな領域としてもよいし、ブロックより小さな領域としてもよい。
In the following, the above-mentioned area is designated as H.264. The description will be given by taking as an example a case where a macro block in the H.264 / MPEG-4 AVC standard is used and the prediction target area is a block in the macro block, but the present invention is not limited to this. For example, the certain unit area may be an area larger than the macro block or an area smaller than the macro block. The prediction target area may be larger than the block or smaller than the block.
図1は、動画像復号装置1の構成を示すブロック図である。図1に示すように、動画像復号装置1は、可変長符号逆多重化部11、ヘッダ情報復号部12、MB設定部13、MB復号部14、および、フレームメモリ15を備えている。
FIG. 1 is a block diagram showing a configuration of the moving picture decoding apparatus 1. As shown in FIG. 1, the moving picture decoding apparatus 1 includes a variable length code demultiplexing unit 11, a header information decoding unit 12, an MB setting unit 13, an MB decoding unit 14, and a frame memory 15.
動画像復号装置1に入力された符号化データ#1は可変長符号逆多重化部11へ入力される。可変長符号逆多重化部11は、入力された符号化データ#1を逆多重化することによって、符号化データ#1を、ヘッダ情報に関する符号化データであるヘッダ符号化データ#11aと、スライスに関する符号化データである符号化データ#11bとに分離し、ヘッダ符号化データ#11aをヘッダ情報復号部12に、符号化データ#11bをMB設定部13にそれぞれ出力する。
The encoded data # 1 input to the video decoding device 1 is input to the variable length code demultiplexing unit 11. The variable-length code demultiplexing unit 11 demultiplexes the input encoded data # 1, thereby converting the encoded data # 1 into header encoded data # 11a that is encoded data related to header information, and a slice. And the encoded data # 11a is output to the header information decoding unit 12 and the encoded data # 11b is output to the MB setting unit 13, respectively.
ヘッダ情報復号部12では、ヘッダ符号化データ#11aからヘッダ情報#12を復号する。ここで、ヘッダ情報#12は、入力画像のサイズを含む情報である。
The header information decoding unit 12 decodes the header information # 12 from the encoded header data # 11a. Here, the header information # 12 is information including the size of the input image.
MB設定部13では、入力されたヘッダ情報#12に基づいて、符号化データ#11bを個々のマクロブロックに対応する符号化データ#13に分離し、MB復号部14に対して順次出力する。なお、符号化データ#13には、対応するマクロブロックに含まれる各ブロック(単位領域)のスキップ情報が含まれている。ここで、スキップ情報とは、ブロックがスキップブロック(スキップ領域)に該当するか非スキップブロック(非スキップ領域)に該当するかを示す情報である。
The MB setting unit 13 separates the encoded data # 11b into encoded data # 13 corresponding to each macroblock based on the input header information # 12 and sequentially outputs the encoded data # 11b to the MB decoding unit 14. The encoded data # 13 includes skip information for each block (unit area) included in the corresponding macroblock. Here, the skip information is information indicating whether a block corresponds to a skip block (skip area) or a non-skip block (non-skip area).
MB復号部14は、入力された個々のマクロブロックに対応する符号化データ#13を順次復号することにより、個々のマクロブロックに対応する復号画像#2を生成し、出力する。また、復号画像#2は、フレームメモリ15に対しても出力される。MB復号部14の構成については、後述するためここでは説明を省略する。
The MB decoding unit 14 generates and outputs a decoded image # 2 corresponding to each macroblock by sequentially decoding the encoded data # 13 corresponding to each input macroblock. The decoded image # 2 is also output to the frame memory 15. The configuration of the MB decoding unit 14 will be described later and will not be described here.
フレームメモリ15には、復号画像#2が記録される。フレームメモリ15には、特定のマクロブロックを復号する時点において、当該マクロブロックよりもラスタスキャン順で先行する全てのマクロブロックに対応する復号画像が記録されている。
The decoded image # 2 is recorded in the frame memory 15. In the frame memory 15, decoded images corresponding to all macroblocks preceding the macroblock in the raster scan order at the time of decoding the specific macroblock are recorded.
画像内の全てのマクロブロックに対して、MB復号部14によるマクロブロック単位の復号画像生成処理が終わった時点で、動画像復号装置1に入力された符号化データに対応する復号画像#2の生成処理が完了する。
When all the macroblocks in the image have been decoded by the MB decoding unit 14 in units of macroblocks, the decoded image # 2 corresponding to the encoded data input to the video decoding device 1 The generation process is completed.
(MB復号部14)
以下では、MB復号部14について、参照する図面を替えてより具体的に説明する。 (MB decoding unit 14)
Hereinafter, theMB decoding unit 14 will be described more specifically with reference to different drawings.
以下では、MB復号部14について、参照する図面を替えてより具体的に説明する。 (MB decoding unit 14)
Hereinafter, the
図2は、MB復号部14の構成を示すブロック図である。図2に示すように、MB復号部14は、MB内mv復号部141、動き補償予測部142、予測画像生成部143、およびMB復号画像生成部144を備えている。
FIG. 2 is a block diagram showing a configuration of the MB decoding unit 14. As illustrated in FIG. 2, the MB decoding unit 14 includes an MB mv decoding unit 141, a motion compensation prediction unit 142, a predicted image generation unit 143, and an MB decoded image generation unit 144.
MB内mv復号部141は、入力された符号化データ#13に対応するマクロブロック(以下、「対象マクロブロック」と呼称する)に含まれる各ブロックについて動きベクトルデータ#141を導出し、後段に出力する。MB内mv復号部141は、非スキップブロックに関する動きベクトルデータ#141を導出するために、符号化データ#13に含まれている当該非スキップブロックに関する符号化済みの動きベクトルのデータを参照する。一方、MB内mv復号部141は、スキップブロックに関する動きベクトルデータ#141を導出するために、当該スキップブロック以外のブロックに関する動きベクトルのデータを参照する。符号化データ#13にはスキップブロックに関する動きベクトルのデータが含まれていないからである。なお、MB内mv復号部141の詳細については後述することにする。
The mv decoding unit 141 in MB derives the motion vector data # 141 for each block included in the macroblock (hereinafter referred to as “target macroblock”) corresponding to the encoded data # 13 that has been input. Output. The MB mv decoding unit 141 refers to the encoded motion vector data related to the non-skip block included in the encoded data # 13 in order to derive the motion vector data # 141 related to the non-skip block. On the other hand, the mv decoding unit 141 in MB refers to motion vector data related to blocks other than the skip block in order to derive motion vector data # 141 related to the skip block. This is because the encoded data # 13 does not include motion vector data related to the skip block. Details of the MB mv decoding unit 141 will be described later.
動き補償予測部142は、動きベクトルデータ#141、復号画像#2、および、フレームメモリ15に記録されている復号画像#15に基づいて、各ブロックに対応する予測画像#142を生成し、後段に出力する。
The motion compensation prediction unit 142 generates a prediction image # 142 corresponding to each block based on the motion vector data # 141, the decoded image # 2, and the decoded image # 15 recorded in the frame memory 15, and the subsequent stage Output to.
予測残差復号部143は、対象マクロブロックに含まれる各ブロックの符号化データに対し可変長符号復号を適用することによって、ブロックに対する変換係数を生成する。また、予測残差復号部143は、生成した変換係数に対して、DCT(Discrete Cosine Transform)の逆変換を適用することによって復号残差#143を生成し、後段に出力する。
The prediction residual decoding unit 143 generates transform coefficients for the block by applying variable length code decoding to the encoded data of each block included in the target macroblock. Also, the prediction residual decoding unit 143 generates a decoding residual # 143 by applying a reverse transform of DCT (Discrete Cosine Transform) to the generated transform coefficient, and outputs it to the subsequent stage.
MB復号画像生成部144は、各ブロックについて出力された予測画像#142と復号残差#143とに基づいて、対象マクロブロックの復号画像#2を生成し、後段に出力する。
The MB decoded image generation unit 144 generates a decoded image # 2 of the target macroblock based on the prediction image # 142 and the decoding residual # 143 output for each block, and outputs them to the subsequent stage.
(MB内mv復号部141)
MB内mv復号部141について、参照する図面を替えてさらに具体的に説明する。 (In-MB mv decoding unit 141)
The MBmv decoding unit 141 will be described more specifically with reference to different drawings.
MB内mv復号部141について、参照する図面を替えてさらに具体的に説明する。 (In-MB mv decoding unit 141)
The MB
最初にMB内mv復号部141の構成について、図3(a)を参照しながら説明する。
First, the configuration of the mv decoding unit 141 in the MB will be described with reference to FIG.
図3(a)は、MB内mv復号部141の構成を示すブロック図である。図3(a)に示すように、MB内mv復号部141は、ブロックスキャン部141a、mv推定部141b、スキップ情報復号部141c、スイッチ141d、mv復号部141e、スキップ用mv推定部141f、およびmvバッファ141gを備えている。
FIG. 3A is a block diagram showing a configuration of the mv decoding unit 141 in the MB. As shown in FIG. 3A, the mv decoding unit 141 in the MB includes a block scan unit 141a, an mv estimation unit 141b, a skip information decoding unit 141c, a switch 141d, an mv decoding unit 141e, a skip mv estimation unit 141f, and An mv buffer 141g is provided.
ブロックスキャン部141aは、対象マクロブロックからラスタスキャン順に選択された各ブロック(以下、選択されたブロックを「対象ブロック」と称する)について、選択された順に、差分動きベクトル(差分値、差分mv)情報と、スキップ情報と、を後段に出力する。
The block scanning unit 141a performs differential motion vectors (difference value, difference mv) in the selected order for each block selected from the target macroblock in the raster scan order (hereinafter, the selected block is referred to as “target block”). Information and skip information are output to the subsequent stage.
mv推定部141bは、差分mv情報が入力されると、mvバッファ141gに記録されているmv情報に基づいて予測動きベクトル(予測値、pmv)を算出し、pmvを表わすpmv情報と、差分mv情報とを、後段に出力する。
When the difference mv information is input, the mv estimation unit 141b calculates a predicted motion vector (predicted value, pmv) based on the mv information recorded in the mv buffer 141g, and the pmv information indicating pmv and the difference mv Information is output to the subsequent stage.
スキップ情報復号部141cは、スキップ情報の符号化データが入力されると、符号化されたスキップ情報を復号して後段に出力する。
When the skip information encoded data is input, the skip information decoding unit 141c decodes the encoded skip information and outputs it to the subsequent stage.
スイッチ141dは、入力された情報を切り替え先からそのまま出力するものであり、スキップ情報がスキップブロックと非スキップブロックとのいずれを示しているかに応じて、切り替え先を切り替えるようになっている。
The switch 141d outputs the input information as it is from the switching destination, and switches the switching destination according to whether the skip information indicates a skip block or a non-skip block.
mv復号部141eは、入力された符号化済みの差分mv情報(符号化パラメータ)を復号して、pmvと差分mvとを加算することによりmv情報(パラメータ)を生成し、mv情報を後段に出力する。
The mv decoding unit 141e decodes the input encoded difference mv information (encoding parameter), generates mv information (parameter) by adding pmv and the difference mv, and sends the mv information to the subsequent stage. Output.
mvバッファ141gには、各ブロックの情報が記録される。すなわち、スキップ情報とmv情報と対象ブロックがスキャンされた順序を示す順序情報とが関連付けて記録される。
Information on each block is recorded in the mv buffer 141g. That is, skip information, mv information, and order information indicating the order in which the target block is scanned are recorded in association with each other.
スキップ用mv推定部141fは、対象マクロブロックからラスタ順に選択した各スキップブロックについて、選択した順に当該スキップブロックのmv(推定値)を推定する。
The skip mv estimation unit 141f estimates mv (estimated value) of the skip block in the selected order for each skip block selected in raster order from the target macroblock.
なお、図3(b)に示すMB復号部1410と対比するとわかるように、本実施形態に係るMB復号部141は、スキップ用mv推定部141fを備えている点に特徴がある。
Note that, as compared with the MB decoding unit 1410 shown in FIG. 3B, the MB decoding unit 141 according to the present embodiment is characterized in that it includes a skipping mv estimation unit 141f.
(MB内mv復号部141の動作)
次に、MB内mv復号部141の動作について、図4および図5を参照しながら説明する。 (Operation ofmv decoding unit 141 in MB)
Next, the operation of themv decoding unit 141 in MB will be described with reference to FIGS.
次に、MB内mv復号部141の動作について、図4および図5を参照しながら説明する。 (Operation of
Next, the operation of the
図4は、対象マクロブロック内の各ブロックの動きベクトルを導出するmv導出処理を示すフローチャートである。また、図5(a)~(c)は、対象マクロブロックMB内の各ブロック(SB1~SB16)について、mv導出処理の開始前、S7の処理を行う時点、およびmv導出処理完了後のそれぞれの時点におけるmvの導出状態を模式的に示した図である。なお、図5(b)(c)における大きい矢印は、予測画像の生成に実際に使用されるmvを示しており、図5(b)における小さい矢印は、予測画像の生成には使用されず、非スキップブロックにおけるpmvの生成にのみ使用される暫定的なmv(仮パラメータ)を示している。
FIG. 4 is a flowchart showing an mv derivation process for deriving a motion vector of each block in the target macroblock. FIGS. 5A to 5C show the respective blocks (SB1 to SB16) in the target macroblock MB before the start of the mv derivation process, when the process of S7 is performed, and after the completion of the mv derivation process. It is the figure which showed typically the derivation | leading-out state of mv in the time of. The large arrows in FIGS. 5B and 5C indicate the mv actually used for generating the predicted image, and the small arrows in FIG. 5B are not used for generating the predicted image. The provisional mv (temporary parameter) used only for the generation of pmv in the non-skip block is shown.
ブロックスキャン部141aは、最後にS1で対象ブロックに設定されたブロックのラスタスキャン順で次のブロック(対象マクロブロックに初めてS1の処理を施す場合には、対象マクロブロックの左上隅に位置するブロック)を対象ブロックとして設定し、対象ブロックがスキャンされた順序を示す順序情報と、対象ブロックのpmv情報と、をmv推定部141bに出力する。同時に、ブロックスキャン部141aは、対象ブロックのスキップ情報をスキップ情報復号部141cに出力する(ステップS1)。ここで、順序情報は、対象マクロブロック内の左上のブロックから右下のブロックにかけてラスタスキャン順に1から16と定義される。
The block scanning unit 141a finally selects the next block in the raster scan order of the block set as the target block in S1 (the block located in the upper left corner of the target macroblock when the target macroblock is subjected to the processing of S1 for the first time). ) Is set as the target block, and the order information indicating the order in which the target block was scanned and the pmv information of the target block are output to the mv estimating unit 141b. At the same time, the block scanning unit 141a outputs the skip information of the target block to the skip information decoding unit 141c (step S1). Here, the order information is defined as 1 to 16 in the raster scan order from the upper left block to the lower right block in the target macroblock.
また、ステップS1において、ブロックスキャン部141aは対象ブロックが最終ブロック(ブロックSB16)であるか否かを判定する。
In step S1, the block scanning unit 141a determines whether the target block is the last block (block SB16).
次に、mv推定部141bは、mvバッファ141gに記録されているmv情報(または、暫定的なmvを示す暫定mv情報)からpmv情報を生成し、入力された差分mv情報および順序情報と併せてスイッチ141dに出力する(ステップS2)。
Next, the mv estimation unit 141b generates pmv information from the mv information (or provisional mv information indicating provisional mv) recorded in the mv buffer 141g, and combines it with the input difference mv information and order information. Output to the switch 141d (step S2).
ステップS2におけるpmv情報の生成は、具体的には、対象ブロックの周囲3つのブロック(左、上、右上のブロック)のmv情報(または暫定mv情報)に基づいて、3つのmv(または暫定mv)の中央値をpmvとすることにより行われる。例えば、図5(b)において、対象ブロックがブロックSB11である場合、ブロックSB7のmvと、ブロックSB8の暫定mvと、ブロックSB10の暫定pmvと、の中央値pmvを示すpmv情報が生成されている。なお、本明細書では、「n個の2次元ベクトルの中央値をpmv(mv)とする」とは、「pmv(mv)の水平成分を各2次元ベクトルの水平成分の中央値とし、pmv(mv)の垂直成分を各2次元ベクトルの垂直成分の中央値とする」意味で用いている。
Specifically, the pmv information is generated in step S2 based on mv information (or provisional mv information) of three blocks (left, top, and top right blocks) around the target block. ) Is set to pmv. For example, in FIG. 5B, when the target block is the block SB11, pmv information indicating the median value pmv of the mv of the block SB7, the provisional mv of the block SB8, and the provisional pmv of the block SB10 is generated. Yes. In this specification, “the median value of n two-dimensional vectors is pmv (mv)” means “the horizontal component of pmv (mv) is the median value of the horizontal components of each two-dimensional vector, and pmv The vertical component of (mv) is used as the median value of the vertical component of each two-dimensional vector.
また、ステップS2において、スキップ情報復号部141cは、入力されたスキップ情報を復号して、スイッチ141dに出力する。
In step S2, the skip information decoding unit 141c decodes the input skip information and outputs it to the switch 141d.
そして、スキップ情報が入力されると、スイッチ141dは、スキップ情報がスキップブロックと非スキップブロックとのいずれを示しているかを判定する(ステップS3)。
When the skip information is input, the switch 141d determines whether the skip information indicates a skip block or a non-skip block (step S3).
非スキップブロックであると判定された場合(ステップS3においてNO)、スイッチ141dは、スイッチを切り替え、入力されたスキップ情報、順序情報、pmv情報および差分mv情報をmv復号部141eに出力する。そして、mv復号部141eは、入力された差分mv情報を復号して、pmv情報と復号済の差分mv情報とからmv情報を生成し(ステップS4)、順序情報と、スキップ情報と、生成したmv情報と、を関連づけてmvバッファ141gに記録する(ステップS5)。例えば、図5(b)において、対象ブロックがブロックSB11である場合、生成したmv情報を、順序情報の値11と、非スキップブロックであることを示すスキップ情報と、に関連づけてmvバッファ141gに記録する。
When it is determined that the block is a non-skip block (NO in step S3), the switch 141d switches the switch and outputs the input skip information, order information, pmv information, and difference mv information to the mv decoding unit 141e. Then, the mv decoding unit 141e decodes the input difference mv information, generates mv information from the pmv information and the decoded difference mv information (step S4), generates the order information, the skip information, and The mv information is associated and recorded in the mv buffer 141g (step S5). For example, in FIG. 5B, when the target block is the block SB11, the generated mv information is associated with the order information value 11 and the skip information indicating a non-skip block in the mv buffer 141g. Record.
一方、スキップブロックであると判定された場合(ステップS3においてYES)、スイッチ141dは、スイッチを切り替え、入力されたpmv情報を暫定mv情報として、スキップ情報および順序情報と関連づけてmvバッファ141gに記録する(ステップS5)。例えば、図5(b)において、対象ブロックがブロックSB10である場合、入力されたpmv情報を暫定mv情報として、順序情報の値10と、スキップブロックであることを示すスキップ情報と、に関連づけてmvバッファ141gに記録する。ステップS5の処理の後、ステップS6に進む。
On the other hand, when it is determined that the block is a skip block (YES in step S3), the switch 141d switches the switch and records the input pmv information as provisional mv information in association with the skip information and the order information in the mv buffer 141g. (Step S5). For example, in FIG. 5B, when the target block is the block SB10, the input pmv information is used as provisional mv information, and is associated with the order information value 10 and the skip information indicating a skip block. Recorded in the mv buffer 141g. It progresses to step S6 after the process of step S5.
直前のステップS1の処理において最終ブロックでないと判定された場合(ステップS6においてNO)、ステップS1の処理に戻る。
If it is determined that the block is not the last block in the immediately preceding step S1 (NO in step S6), the process returns to step S1.
一方、直前のステップS1の処理において最終ブロックであると判定された場合(ステップS6においてYES)、ブロックスキャン部141aは、スキップ用mv推定部141fがスキップブロックのmvを導出する処理を開始するトリガとなる信号を、スキップ用mv推定部141fに出力する(ステップS7)。
On the other hand, when it is determined that the block is the last block in the immediately preceding step S1 (YES in step S6), the block scanning unit 141a triggers the skip mv estimating unit 141f to start the process of deriving the mv of the skip block Is output to the skipping mv estimation unit 141f (step S7).
トリガとなる信号が入力されたスキップ用mv推定部141fは、mvバッファ141gを参照し、ラスタスキャン順で最後にmvを導出したスキップブロックの次のスキップブロック(対象マクロブロックに初めてS8の処理を施す場合には、順序情報の値が最も小さいスキップブロック)について、mvを導出する(ステップS8)。この処理については、参照する図面を換えて、詳細な説明を後で述べることにする。
The skip mv estimation unit 141f to which the trigger signal is input refers to the mv buffer 141g, and skips the block next to the skip block from which mv was finally derived in the raster scan order (the process of S8 is first performed on the target macroblock). If it is applied, mv is derived for the skip block having the smallest order information value (step S8). A detailed description of this process will be given later with reference to another drawing.
そして、スキップ用mv推定部141fは、mvを導出したスキップブロックの暫定mv情報(mvバッファ141gに記録されている暫定mv情報)を、ステップS8において導出したmvによりmv情報に更新する(ステップS9)。
Then, the skipping mv estimation unit 141f updates the provisional mv information (provisional mv information recorded in the mv buffer 141g) of the skip block from which mv is derived with the mv derived in step S8 (step S9). ).
そして、スキップ用mv推定部141fは対象マクロブロック内のすべてのスキップブロックについてS8,S9の処理を施したか否かを判定する(ステップS10)。
Then, the skip mv estimating unit 141f determines whether or not the processes of S8 and S9 have been performed for all skip blocks in the target macroblock (step S10).
まだS8,S9の処理を施していないスキップブロックが存在すると判定した場合(ステップS10においてNO)、S8の処理に戻る。
If it is determined that there is a skip block that has not been subjected to the processes of S8 and S9 yet (NO in step S10), the process returns to the process of S8.
一方、すべてのスキップブロックについてS8,S9の処理を施したと判定した場合(ステップS10においてYES)、スキップ用mv推定部141fは、mvバッファ141gを参照し、対象マクロブロックの各ブロックについて導出したmv(図5(c)の16個の各矢印が表わすmv)のmv情報#141を動き補償予測部142に出力する。
On the other hand, when it is determined that the processing of S8 and S9 has been performed for all skip blocks (YES in step S10), the skip mv estimation unit 141f refers to the mv buffer 141g and derives each block of the target macroblock. The mv information # 141 of mv (mv represented by each of the 16 arrows in FIG. 5C) is output to the motion compensation prediction unit 142.
(ステップS8におけるmv導出処理の詳細について)
図4のステップS8において、スキップ用mv推定部141fがスキップブロックのmv情報を導出する処理について、図9を参照しながら以下に説明する。 (Details of mv derivation process in step S8)
The process in which the skipmv estimation unit 141f derives the mv information of the skip block in step S8 in FIG. 4 will be described below with reference to FIG.
図4のステップS8において、スキップ用mv推定部141fがスキップブロックのmv情報を導出する処理について、図9を参照しながら以下に説明する。 (Details of mv derivation process in step S8)
The process in which the skip
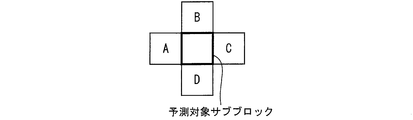
図9は、予測対象のスキップブロックと、上下左右に隣接する4つのブロックA~Dと、を模式的に示した図である。
FIG. 9 is a diagram schematically showing a skip block to be predicted and four blocks A to D adjacent vertically and horizontally.
4つのブロックA~Dのうち、ステップS5またはステップS8においてmvを導出済みであるブロック(以下、「利用可能なブロック」と呼称する)の数に応じて、以下のようにmv情報を導出する。
Of the four blocks A to D, mv information is derived as follows according to the number of blocks for which mv has already been derived in step S5 or step S8 (hereinafter referred to as “available blocks”). .
すなわち、利用可能なブロックの数が4つの場合(例えば、予測対象のスキップブロックが図5(b)のSB10である場合)、ブロックA~C(図5(b)のSB6、SB9、SB10)のmvの中央値を、導出するmvとする。
That is, when the number of available blocks is four (for example, when the skip block to be predicted is SB10 in FIG. 5B), blocks A to C (SB6, SB9, SB10 in FIG. 5B) Let mv be the median of mv.
また、利用可能なブロックの数が3つの場合(例えば、予測対象のスキップブロックが図5(b)のSB12である場合)、利用可能な3つのブロック(図5(b)のSB8、SB11、SB16)のmvの中央値を、導出するmvとする。
Further, when the number of usable blocks is three (for example, when the skip block to be predicted is SB12 in FIG. 5B), three usable blocks (SB8, SB11, The median value of mv of SB16) is set as derived mv.
また、利用可能なブロックの数が2つの場合(例えば、予測対象のスキップブロックが図5(b)のSB8である場合)、利用可能な2つのブロック(図5(b)のSB4、SB7)のmvの平均値を、導出するmvとする。
When the number of usable blocks is two (for example, when the skip block to be predicted is SB8 in FIG. 5B), two usable blocks (SB4 and SB7 in FIG. 5B). The average value of mv is defined as derived mv.
さらに、利用可能なブロックの数が1つの場合、利用可能なそのブロックのmvそのものを、導出するmvとなり、利用可能なブロックが1つも存在しない場合、導出するmvはゼロベクトルとなる。
Furthermore, when the number of usable blocks is one, the mv itself of the block that can be used is derived mv, and when no usable block exists, the derived mv is a zero vector.
<動画像復号装置に関する付記事項>
以上、本実施形態に係る動画像復号装置1について説明を行ったが、本発明は、以上の構成に限定されるものではない。 <Additional notes regarding video decoding device>
Although thevideo decoding device 1 according to the present embodiment has been described above, the present invention is not limited to the above configuration.
以上、本実施形態に係る動画像復号装置1について説明を行ったが、本発明は、以上の構成に限定されるものではない。 <Additional notes regarding video decoding device>
Although the
(付記事項1)
上記実施形態では、導出する符号化パラメータの具体例として動きベクトルを挙げたが、
「動画像符号化装置に関する付記事項」として後述しているように、符号化パラメータは動きベクトルに限られず、動き補償予測により予測画像を生成するために参照されるその他の予測パラメータであってもよい。すなわち、符号化パラメータは、例えば、参照画像インデックス、参照画像リスト番号、Bピクチャにおける双方向予測を行うか否かを示すフラグなどであってもよい。また、重み付け予測における重み係数も符号化パラメータとしてもよい。なお、動き補償予測において参照された参照画像のフレーム番号は、参照画像リスト番号と参照画像インデックスとにより特定することができる。すなわち、与えられた参照画像リスト番号により指定された参照画像リストにおいて、与えられた参照画像インデックスに対応付けられているフレーム番号を特定することより、動き補償予測において参照された参照画像のフレーム番号を特定することができる。また、重み付け予測とは、複数の参照画像の各々からの動き補償予測によって生成された予測画像の加重平均をとって予測画像を生成することを指す。重み付け予測の重み係数とは、この加重平均において用いられる重み係数のことである。 (Appendix 1)
In the above embodiment, the motion vector is given as a specific example of the encoding parameter to be derived.
As described later in “Additional Notes on Video Encoding Device”, encoding parameters are not limited to motion vectors, and may be other prediction parameters referred to for generating a predicted image by motion compensation prediction. Good. That is, the encoding parameter may be, for example, a reference image index, a reference image list number, a flag indicating whether or not to perform bi-directional prediction on a B picture. Also, a weighting factor in weighted prediction may be used as an encoding parameter. Note that the frame number of the reference image referenced in the motion compensation prediction can be specified by the reference image list number and the reference image index. That is, by specifying the frame number associated with the given reference picture index in the reference picture list specified by the given reference picture list number, the frame number of the reference picture referenced in the motion compensation prediction Can be specified. Further, weighted prediction refers to generating a predicted image by taking a weighted average of predicted images generated by motion compensated prediction from each of a plurality of reference images. The weighting coefficient for weighted prediction is a weighting coefficient used in this weighted average.
上記実施形態では、導出する符号化パラメータの具体例として動きベクトルを挙げたが、
「動画像符号化装置に関する付記事項」として後述しているように、符号化パラメータは動きベクトルに限られず、動き補償予測により予測画像を生成するために参照されるその他の予測パラメータであってもよい。すなわち、符号化パラメータは、例えば、参照画像インデックス、参照画像リスト番号、Bピクチャにおける双方向予測を行うか否かを示すフラグなどであってもよい。また、重み付け予測における重み係数も符号化パラメータとしてもよい。なお、動き補償予測において参照された参照画像のフレーム番号は、参照画像リスト番号と参照画像インデックスとにより特定することができる。すなわち、与えられた参照画像リスト番号により指定された参照画像リストにおいて、与えられた参照画像インデックスに対応付けられているフレーム番号を特定することより、動き補償予測において参照された参照画像のフレーム番号を特定することができる。また、重み付け予測とは、複数の参照画像の各々からの動き補償予測によって生成された予測画像の加重平均をとって予測画像を生成することを指す。重み付け予測の重み係数とは、この加重平均において用いられる重み係数のことである。 (Appendix 1)
In the above embodiment, the motion vector is given as a specific example of the encoding parameter to be derived.
As described later in “Additional Notes on Video Encoding Device”, encoding parameters are not limited to motion vectors, and may be other prediction parameters referred to for generating a predicted image by motion compensation prediction. Good. That is, the encoding parameter may be, for example, a reference image index, a reference image list number, a flag indicating whether or not to perform bi-directional prediction on a B picture. Also, a weighting factor in weighted prediction may be used as an encoding parameter. Note that the frame number of the reference image referenced in the motion compensation prediction can be specified by the reference image list number and the reference image index. That is, by specifying the frame number associated with the given reference picture index in the reference picture list specified by the given reference picture list number, the frame number of the reference picture referenced in the motion compensation prediction Can be specified. Further, weighted prediction refers to generating a predicted image by taking a weighted average of predicted images generated by motion compensated prediction from each of a plurality of reference images. The weighting coefficient for weighted prediction is a weighting coefficient used in this weighted average.
また、予測残差変換係数のDC成分を符号化パラメータとしてもよい。
Also, the DC component of the prediction residual transform coefficient may be used as the encoding parameter.
後述するように、動画像符号化装置では、符号化パラメータとして予測残差変換係数のDC成分を用いる場合、スキップブロックにおける予測残差変換係数のDC成分を、各隣接ブロックにおけるDC成分の予測残差変化係数を該スキップブロックと該隣接ブロックとの間の距離に応じた重み付け平均を行うことにより導出することになる。従って、動画像復号装置においても、同様に導出することになる。すなわち、予測残差復号部143は、スキップブロックについてはAC成分の予測残差変換係数のみを復号することになる。
As will be described later, in the moving picture coding apparatus, when the DC component of the prediction residual transform coefficient is used as a coding parameter, the DC component of the prediction residual transform coefficient in the skip block is used as the DC component prediction residual in each adjacent block. The difference change coefficient is derived by performing a weighted average according to the distance between the skip block and the adjacent block. Accordingly, the same is derived in the moving picture decoding apparatus. That is, the prediction residual decoding unit 143 decodes only the prediction residual transform coefficient of the AC component for the skip block.
なお、実施形態に係る符号化パラメータの生成処理を、上述した2以上の具体例(例えば、動きベクトルおよび参照画像インデックス)について行っても良い。
Note that the encoding parameter generation processing according to the embodiment may be performed on the above-described two or more specific examples (for example, motion vectors and reference image indexes).
(付記事項2)
上述した実施形態では、mv復号部141eは、pmv情報と復号した差分mv情報とからmvを復号するものとしたが、符号化済みのmv情報が入力される場合には、mv情報そのものを復号すればよい。 (Appendix 2)
In the above-described embodiment, themv decoding unit 141e decodes mv from the pmv information and the decoded difference mv information. However, when encoded mv information is input, the mv information itself is decoded. do it.
上述した実施形態では、mv復号部141eは、pmv情報と復号した差分mv情報とからmvを復号するものとしたが、符号化済みのmv情報が入力される場合には、mv情報そのものを復号すればよい。 (Appendix 2)
In the above-described embodiment, the
また、上述した実施形態において、非スキップブロックにおけるpmv情報の導出のために、mv推定部141bが暫定mvを導出するものとしたが、pmv情報の導出のために暫定mvを導出しないような動画像復号装置も本発明の範囲に含まれる。
In the above-described embodiment, the mv estimation unit 141b derives the provisional mv for derivation of the pmv information in the non-skip block. However, the moving image does not derive the provisional mv for the derivation of the pmv information. An image decoding device is also included in the scope of the present invention.
(付記事項3)
スキップ用mv推定部141fによるスキップブロックのmvの導出に、右や下に隣接する非スキップブロックのmvを用いるものとしたが、スキップブロックの左下や右下に隣接する非スキップブロックのmvを用いてもよい。 (Appendix 3)
The mv of the skip block is derived by themv estimation unit 141f for skipping using the mv of the non-skip block adjacent to the right or the bottom, but the mv of the non-skip block adjacent to the lower left or the lower right of the skip block is used. May be.
スキップ用mv推定部141fによるスキップブロックのmvの導出に、右や下に隣接する非スキップブロックのmvを用いるものとしたが、スキップブロックの左下や右下に隣接する非スキップブロックのmvを用いてもよい。 (Appendix 3)
The mv of the skip block is derived by the
また、スキップ用mv推定部141fは、入力画像内のスキップブロックにおけるmvを以下のように導出してもよい。すなわち、参照画像内のコロケーティッドブロック(collocated block:入力画像内における当該スキップブロックの位置と参照画像内において同位置にあるブロック)のmvと、上下左右に隣接する4つのブロックのmvと、が利用可能である場合、導出するmvを、これら5つのmvの中央値にしてもよい。
Further, the skip mv estimation unit 141f may derive mv in the skip block in the input image as follows. That is, mv of a collocated block (collocated block: a block located in the same position in the reference image and the position of the skip block in the input image), mv of four blocks adjacent vertically and horizontally, May be used, the derived mv may be the median of these five mvs.
さらに、スキップ用mv推定部141fは、スキップブロックにおけるmvを以下のように導出してもよい。すなわち、導出するmvを、当該スキップブロックの上下左右に隣接する4つのブロックのmvと、当該スキップブロックを含むマクロブロック内の全導出(復号)済みmvの最頻値に係るmvとからなる5つのmvの中央値にしてもよい。
Further, the skip mv estimation unit 141f may derive mv in the skip block as follows. That is, the derived mv is composed of mv of four blocks adjacent to the skip block in the vertical and horizontal directions, and mv related to the mode value of all derived (decoded) mvs in the macroblock including the skip block. The median value of two mvs may be used.
(付記事項4)
上述した実施形態では、mv復号部141eがすべてのmvを復号し、mv推定部141bがすべての暫定mvを導出したタイミングで、ブロックスキャン部141aがスキップ用mv推定部141fにmvの導出を開始させるものとしたが、タイミングはこれに限定されない。 (Appendix 4)
In the embodiment described above, at the timing when themv decoding unit 141e decodes all mvs and the mv estimation unit 141b derives all provisional mvs, the block scanning unit 141a starts derivation of mv to the skip mv estimation unit 141f. However, the timing is not limited to this.
上述した実施形態では、mv復号部141eがすべてのmvを復号し、mv推定部141bがすべての暫定mvを導出したタイミングで、ブロックスキャン部141aがスキップ用mv推定部141fにmvの導出を開始させるものとしたが、タイミングはこれに限定されない。 (Appendix 4)
In the embodiment described above, at the timing when the
すなわち、スキップ用mv推定部141fが各スキップブロックのmvの導出を開始するタイミングは、当該スキップブロックから規定の範囲内にある非スキップブロックにおけるmvをmv復号部141eがすべて復号したタイミングであってもよい。ここで、規定の範囲とは、スキップ用mv推定部141fがスキップブロックのmvを導出するために、mvを参照する可能性があるブロックが含まれる範囲を示している。すなわち、上述した実施形態に即して言えば、規定の範囲に含まれるブロックとは、mvを導出するスキップブロックに隣接する上下左右のブロックである。なお、図5(a)に示すマクロブロックを例に挙げると、例えば、スキップ用mv推定部141fがスキップブロックSB10の導出を開始するタイミングは、スキップブロックSB10から規定の範囲に含まれる4つの非スキップブロックSB6、SB9、SB11およびSB14におけるmvをmv復号部141eがすべて復号した時点以降となる。また、スキップ用mv推定部141fがスキップブロックSB8の導出を開始するタイミングは、スキップブロックSB8から規定の範囲に含まれる2つの非スキップブロックSB4およびSB7におけるmvをmv復号部141eが両方復号した時点以降となる。
That is, the timing at which the mv estimation unit 141f for skipping starts the derivation of the mv of each skip block is the timing at which the mv decoding unit 141e has decoded all the mvs in the non-skip blocks within the specified range from the skip block. Also good. Here, the prescribed range indicates a range including a block that may refer to mv in order for the skip mv estimation unit 141f to derive mv of the skip block. That is, according to the above-described embodiment, the blocks included in the specified range are the upper, lower, left, and right blocks adjacent to the skip block for deriving mv. For example, in the macro block shown in FIG. 5A, for example, the timing at which the skip mv estimating unit 141f starts to derive the skip block SB10 is four non-included ranges included in the specified range from the skip block SB10. It is after the time when the mv decoding unit 141e has decoded all the mvs in the skip blocks SB6, SB9, SB11 and SB14. The timing at which the skip mv estimation unit 141f starts to derive the skip block SB8 is the time when the mv decoding unit 141e decodes both mv in the two non-skip blocks SB4 and SB7 included in the specified range from the skip block SB8. After that.
(付記事項5)
上述した実施形態では、非スキップブロックにおけるmvの復号に必要とされるpmv情報の導出時に、暫定mv情報が用いられる場合がある。しかしながら、暫定mv情報をpmv情報の導出に用いる場合においても、従来用いられたpmv情報と同等のpmv情報を導出できる。以下、その理由について説明する。 (Appendix 5)
In the embodiment described above, provisional mv information may be used when derivation of pmv information required for decoding mv in a non-skip block. However, even when provisional mv information is used for derivation of pmv information, pmv information equivalent to conventionally used pmv information can be derived. The reason will be described below.
上述した実施形態では、非スキップブロックにおけるmvの復号に必要とされるpmv情報の導出時に、暫定mv情報が用いられる場合がある。しかしながら、暫定mv情報をpmv情報の導出に用いる場合においても、従来用いられたpmv情報と同等のpmv情報を導出できる。以下、その理由について説明する。 (Appendix 5)
In the embodiment described above, provisional mv information may be used when derivation of pmv information required for decoding mv in a non-skip block. However, even when provisional mv information is used for derivation of pmv information, pmv information equivalent to conventionally used pmv information can be derived. The reason will be described below.
ラスタスキャン順にmvを導出する従来方式では、pmv情報は、当該ブロックよりもラスタスキャン順で前にあるブロックのmvに基づき導出される。一方、上記実施形態では、非スキップブロックにおけるpmv情報の導出に暫定mv情報が用いられるのは、対象ブロックとして設定される非スキップブロックの左、上、または、右上のいずれかに隣接するブロックがスキップブロックの場合である。そして、スキップブロックにおける暫定mvの導出に、当該ブロックよりもラスタスキャン順で前にあるブロックのmvに基づいて導出される。すなわち、従来方式と上記実施形態とのいずれにおいても、非スキップブロックにおけるpmv情報は、当該ブロックよりもラスタスキャン順で前にあるブロックのmvに基づいて導出されるため、同等のものとなる。すなわち、動画像復号装置1によれば、非スキップブロックにおけるpmv情報の正確さ(すなわちmvの推定精度)を従来方式と同等に保ちつつ、スキップブロックにおけるmvの推定精度を向上させることができる。
In the conventional method of deriving mv in the raster scan order, the pmv information is derived based on the mv of the block preceding the block in the raster scan order. On the other hand, in the above embodiment, the provisional mv information is used to derive the pmv information in the non-skip block because the block adjacent to either the left, top, or top right of the non-skip block set as the target block. This is the case for skip blocks. Then, the provisional mv in the skip block is derived based on the mv of the block preceding the block in the raster scan order. In other words, in both the conventional method and the above-described embodiment, the pmv information in the non-skip block is equivalent because it is derived based on the mv of the block preceding the block in the raster scan order. That is, according to the video decoding device 1, it is possible to improve the estimation accuracy of mv in the skip block while maintaining the accuracy of the pmv information in the non-skip block (that is, the estimation accuracy of mv) equivalent to the conventional method.
(動画像復号装置1の利点)
以上のように、動画像復号装置1では、ブロックスキャン部141aが、符号化データ#13に含まれる各ブロックを、該ブロックに関するmvを符号化することにより得られる符号が符号化データ#13に含まれている非スキップブロックと、該ブロックに関するmvを符号化することにより得られる符号が符号化データ#13に含まれていないスキップブロックとに分類する。 (Advantages of the video decoding device 1)
As described above, in thevideo decoding device 1, the block scanning unit 141a encodes each block included in the encoded data # 13, and the code obtained by encoding the mv related to the block is the encoded data # 13. The non-skip block included is classified into a skip block in which the code obtained by encoding mv related to the block is not included in the encoded data # 13.
以上のように、動画像復号装置1では、ブロックスキャン部141aが、符号化データ#13に含まれる各ブロックを、該ブロックに関するmvを符号化することにより得られる符号が符号化データ#13に含まれている非スキップブロックと、該ブロックに関するmvを符号化することにより得られる符号が符号化データ#13に含まれていないスキップブロックとに分類する。 (Advantages of the video decoding device 1)
As described above, in the
また、mv復号部141eは、符号化データ#13に含まれる各非スキップブロックについて、当該スキップブロックに関するmvを、符号化データ#13に含まれている対応する符号を復号して得られた値に設定する。
Further, for each non-skip block included in the encoded data # 13, the mv decoding unit 141e decodes the mv related to the skip block and the corresponding code included in the encoded data # 13. Set to.
そして、スキップ用mv推定部141fが、符号化データ#13に含まれる各スキップブロックについて、当該スキップブロックに関するmvを、mv復号部141eにより設定された非スキップブロックに関するmvの値であって、予め規定された復号順序において当該スキップブロックの前後の非スキップブロックに関するmvの値を参照して導出した推定値に設定する。
Then, for each skip block included in the encoded data # 13, the skip mv estimation unit 141f sets the mv for the skip block as the value of mv for the non-skip block set by the mv decoding unit 141e, It is set to an estimated value derived by referring to the value of mv regarding the non-skip blocks before and after the skip block in the prescribed decoding order.
したがって、動画像復号装置1は、従来のmvの推定方法では用いていなかったブロックのmvを用いてmvを導出することができるので、より適切なmvを導出する可能性が高まることになる。すなわち、受信する予測残差の符号量が従来に比べ削減されている可能性が高まる分、動画像復号装置1が受信する符号化データの符号量が従来に比べ削減される可能性が高まり、より少ない処理量で復号画像を出力することができるようになる。
Therefore, since the moving image decoding apparatus 1 can derive mv using mv of a block that has not been used in the conventional mv estimation method, the possibility of deriving a more appropriate mv is increased. That is, the possibility that the code amount of the prediction residual to be received is reduced compared to the conventional case increases, and the code amount of the encoded data received by the video decoding device 1 is increased as compared to the conventional case. The decoded image can be output with a smaller processing amount.
(動画像符号化装置)
以下では、本実施形態に係る動画像符号化装置(符号化装置)2について、図6~図9を参照して説明する。図6は、動画像符号化装置2の構成を示すブロック図である。図6に示すように、動画像符号化装置2は、ヘッダ情報決定部21、ヘッダ情報符号化部22、MB設定部23、MB符号化部24、可変長符号多重化部25、MB復号部26、および、フレームメモリ27を備えている。 (Moving picture encoding device)
Hereinafter, the moving picture encoding apparatus (encoding apparatus) 2 according to the present embodiment will be described with reference to FIGS. FIG. 6 is a block diagram illustrating a configuration of the movingimage encoding device 2. As illustrated in FIG. 6, the moving image encoding device 2 includes a header information determination unit 21, a header information encoding unit 22, an MB setting unit 23, an MB encoding unit 24, a variable length code multiplexing unit 25, and an MB decoding unit. 26 and a frame memory 27.
以下では、本実施形態に係る動画像符号化装置(符号化装置)2について、図6~図9を参照して説明する。図6は、動画像符号化装置2の構成を示すブロック図である。図6に示すように、動画像符号化装置2は、ヘッダ情報決定部21、ヘッダ情報符号化部22、MB設定部23、MB符号化部24、可変長符号多重化部25、MB復号部26、および、フレームメモリ27を備えている。 (Moving picture encoding device)
Hereinafter, the moving picture encoding apparatus (encoding apparatus) 2 according to the present embodiment will be described with reference to FIGS. FIG. 6 is a block diagram illustrating a configuration of the moving
動画像符号化装置2は、概略的に言えば、入力画像#100を符号化することによって符号化データ#1を生成し、出力する装置である。動画像符号化装置2は、その一部に、H.264/MPEG-4 AVC規格に採用されている技術を用いている動画像符号化装置である。
The video encoding device 2 is a device that generates and outputs encoded data # 1 by encoding the input image # 100, in brief. The moving image encoding apparatus 2 includes H.264 as a part thereof. H.264 / MPEG-4 A moving picture coding apparatus using the technology adopted in the AVC standard.
ヘッダ情報決定部21は、入力画像#100に基づいて、ヘッダ情報を決定する。決定されたヘッダ情報はヘッダ情報#21として出力される。ヘッダ情報#21には、入力画像#100の画像サイズが含まれる。ヘッダ情報#21は、MB設定部23に入力されると共に、ヘッダ情報符号化部22に供給される。
The header information determination unit 21 determines header information based on the input image # 100. The determined header information is output as header information # 21. The header information # 21 includes the image size of the input image # 100. The header information # 21 is input to the MB setting unit 23 and supplied to the header information encoding unit 22.
ヘッダ情報符号化部22は、ヘッダ情報#21を符号化し、符号化済ヘッダ情報#22を出力する。符号化済ヘッダ情報#22は、可変長符号多重化部25に供給される。
The header information encoding unit 22 encodes header information # 21 and outputs encoded header information # 22. The encoded header information # 22 is supplied to the variable length code multiplexer 25.
MB設定部23は、ヘッダ情報#21に基づいて、入力画像#100を複数のマクロブロックに分割し、各マクロブロックに関するマクロブロック画像#23を出力する。マクロブロック画像#23は、MB符号化部24に順次供給される。
The MB setting unit 23 divides the input image # 100 into a plurality of macro blocks based on the header information # 21, and outputs a macro block image # 23 related to each macro block. The macro block image # 23 is sequentially supplied to the MB encoding unit 24.
MB符号化部24は、順次入力されるマクロブロック画像#23を符号化し、MB符号化データ#24を生成する。生成されたMB符号化データ#24は、可変長符号多重化部25に供給される。MB符号化部24の構成については、後述するため、ここでは説明を省略する。
The MB encoding unit 24 encodes sequentially input macroblock images # 23 to generate MB encoded data # 24. The generated MB encoded data # 24 is supplied to the variable length code multiplexer 25. Since the configuration of the MB encoding unit 24 will be described later, the description thereof is omitted here.
可変長符号多重化部25は、符号化済ヘッダ情報#22と、MB符号化データ#24とを多重化することによって符号化データ#1を生成し、出力する。
The variable length code multiplexer 25 generates encoded data # 1 by multiplexing the encoded header information # 22 and the MB encoded data # 24, and outputs the encoded data # 1.
MB復号部26は、入力された個々のマクロブロックに対応するMB符号化データ#24を順次復号することにより、個々のマクロブロックに対応する復号画像#26を生成し、出力する。復号画像#26は、フレームメモリ27に供給される。
The MB decoding unit 26 generates and outputs a decoded image # 26 corresponding to each macroblock by sequentially decoding the MB encoded data # 24 corresponding to each input macroblock. The decoded image # 26 is supplied to the frame memory 27.
フレームメモリ27には、入力された復号画像#26が記録される。特定のマクロブロックを符号化する時点では、当該マクロブロックよりもラスタスキャン順で先行する全てのマクロブロックに対応する復号画像がフレームメモリ27に記録されている。
The input decoded image # 26 is recorded in the frame memory 27. At the time of encoding a specific macroblock, decoded images corresponding to all macroblocks preceding the macroblock in the raster scan order are recorded in the frame memory 27.
(MB符号化部24)
以下では、MB符号化部24について、参照する図面を替えてより具体的に説明する。 (MB encoding unit 24)
Hereinafter, theMB encoding unit 24 will be described more specifically with reference to different drawings.
以下では、MB符号化部24について、参照する図面を替えてより具体的に説明する。 (MB encoding unit 24)
Hereinafter, the
図7は、MB符号化部24の構成を示すブロック図である。図7に示すように、MB符号化部24は、スキップ領域選択部24a、動き探索部24b、スキップ用mv推定部24c、mvバッファ24d、動き補償予測部24e、mv符号化部24f、予測残差符号化部24g、およびスキップ情報符号化部24hを備えている。
FIG. 7 is a block diagram showing a configuration of the MB encoding unit 24. As shown in FIG. 7, the MB encoding unit 24 includes a skip region selection unit 24a, a motion search unit 24b, a skip mv estimation unit 24c, an mv buffer 24d, a motion compensation prediction unit 24e, an mv encoding unit 24f, and a prediction residual. A difference encoding unit 24g and a skip information encoding unit 24h are provided.
スキップ領域選択部24aは、入力されたマクロブロック画像#23(以下、MB符号化部24に入力されたマクロブロック画像#23に関するマクロブロックを「対象マクロブロック」と呼称する)を複数のブロック画像に分割し、各ブロックがスキップブロックであるか、非スキップブロックであるか、を所定のアルゴリズムに基づいて決定する。そして、スキップ領域選択部24aは、ラスタスキャン順に選択された各ブロック(選択されたブロックを以下では「対象ブロック」と呼称する)のスキップ情報と、順序情報と、を選択された順に後段に出力する。
The skip region selection unit 24a uses the input macroblock image # 23 (hereinafter, the macroblock related to the macroblock image # 23 input to the MB encoding unit 24 is referred to as “target macroblock”) as a plurality of block images. And whether each block is a skip block or a non-skip block is determined based on a predetermined algorithm. Then, the skip area selection unit 24a outputs the skip information of each block selected in the raster scan order (hereinafter, the selected block is referred to as “target block”) and the order information to the subsequent stage in the selected order. To do.
前述の所定のアルゴリズムとしては、例えば、対象マクロブロックを構成するブロックをn個とした場合に、n個のブロックについて決定可能な2n通りの組み合わせ全てについて、以下の処理を行うアルゴリズムが挙げられる。すなわち、動き探索部24b~動き補償予測部24e、および予測残差符号化部24gに後述する各部の処理を実行させ、各組み合わせについて生成した2n個のMB符号化データ#24をMB復号部26に復号させ、2n個の復号画像#26をフレームメモリ27に記録させる。そして、スキップ領域選択部24aは、各復号画像#26について、当該復号画像の歪みと当該復号画像の生成のために予測残差符号化部24gが符号化した予測残差の符号量とに基づいて、なるべく歪みが少なく、かつ、予測残差の符号量が小さくなるような最適な組み合わせを決定する。
Examples of the predetermined algorithm include an algorithm that performs the following processing for all 2 n combinations that can be determined for n blocks when the number of blocks constituting the target macroblock is n. . That is, the motion search unit 24b to the motion compensated prediction unit 24e and the prediction residual encoding unit 24g execute the processing of each unit described later, and 2 n MB encoded data # 24 generated for each combination is stored in the MB decoding unit. 26, and 2 n decoded images # 26 are recorded in the frame memory 27. Then, for each decoded image # 26, the skip region selection unit 24a is based on the distortion of the decoded image and the code amount of the prediction residual encoded by the prediction residual encoding unit 24g for generating the decoded image. Thus, an optimum combination is determined so that the distortion is as small as possible and the code amount of the prediction residual is small.
動き探索部24bは、mvバッファ24dに記録されている導出済のmvまたは暫定mvに基づいてpmvを生成するとともに、フレームメモリ27に記録されている復号画像#26を参照して動き探索を行うことによりmvを導出する。
The motion search unit 24b generates pmv based on the derived mv or provisional mv recorded in the mv buffer 24d, and performs motion search with reference to the decoded image # 26 recorded in the frame memory 27. To derive mv.
スキップ用mv推定部24cは、mvバッファ24dに記録されている導出済のmvまたは暫定mv(対象ブロックの左、上、右上のブロックのmvまたは暫定mv)に基づいてpmvを生成し、対象ブロックの暫定mvとする。また、スキップ用mv推定部24cは、mvバッファ24dに記録されている導出済のmv(図9のブロックA~Dのうち利用可能な最大3つのブロックのmv)に基づいて、対象ブロックのmv(推定値)を推定する。
The skip mv estimator 24c generates pmv based on the derived mv or provisional mv recorded in the mv buffer 24d (the mv or provisional mv of the left, upper, and upper right blocks of the target block), and the target block Tentative mv. In addition, the skip mv estimation unit 24c calculates the mv of the target block based on the derived mv recorded in the mv buffer 24d (mv of a maximum of three blocks among the blocks A to D in FIG. 9). (Estimated value) is estimated.
mvバッファ24dには、スキップ情報とmv情報と順序情報とが関連付けて記録される。
In the mv buffer 24d, skip information, mv information, and order information are recorded in association with each other.
動き補償予測部24eは、mvバッファ24dから、各mv情報を読み出すとともに、フレームメモリ27から対象マクロブロックに関する復号画像#26を読み出し、対象マクロブロックの予測画像を生成する。
The motion compensation prediction unit 24e reads each mv information from the mv buffer 24d and also reads the decoded image # 26 related to the target macroblock from the frame memory 27 to generate a predicted image of the target macroblock.
mv符号化部24fは、mvバッファ24dから読み出した各非スキップブロックのmv情報を符号化する。
The mv encoding unit 24f encodes the mv information of each non-skip block read from the mv buffer 24d.
予測残差符号化部24gは、マクロブロック画像#23と、対象マクロブロックに関する復号画像#26から予測残差画像を生成し、予測残差画像にDCT(Discrete Cosine Transform)の変換を適用することによって変換係数を生成する。また、予測残差符号化部24gは、生成した変換係数を量子化および可変量符号化する。
The prediction residual encoding unit 24g generates a prediction residual image from the macroblock image # 23 and the decoded image # 26 related to the target macroblock, and applies DCT (Discrete Cosine Transform) conversion to the prediction residual image. To generate a conversion coefficient. Also, the prediction residual encoding unit 24g quantizes and variable-quantizes the generated transform coefficient.
スキップ情報符号化部24hは、mvバッファ24dから読み出した各ブロックのスキップ情報を符号化する。
The skip information encoding unit 24h encodes the skip information of each block read from the mv buffer 24d.
(MB符号化部24の動作)
次に、MB符号化部24の動作について、図8を参照しながら説明する。 (Operation of MB encoding unit 24)
Next, the operation of theMB encoding unit 24 will be described with reference to FIG.
次に、MB符号化部24の動作について、図8を参照しながら説明する。 (Operation of MB encoding unit 24)
Next, the operation of the
図8は、対象マクロブロック内の各ブロックの動きベクトルを生成するmv生成処理を示すフローチャートである。
FIG. 8 is a flowchart showing an mv generation process for generating a motion vector of each block in the target macroblock.
スキップ領域選択部24aは、入力されたマクロブロック画像#23を複数のブロック画像に分割し、各ブロックがスキップブロックであるか、非スキップブロックであるか、を前述した所定のアルゴリズムに基づいて決定する(ステップS21)。
The skip area selection unit 24a divides the input macroblock image # 23 into a plurality of block images, and determines whether each block is a skip block or a non-skip block based on the above-described predetermined algorithm. (Step S21).
そして、スキップ領域選択部24aは、最後にS22で対象ブロックに設定されたブロックのラスタスキャン順で次のブロック(対象マクロブロックに初めてS22の処理を施す場合には、対象マクロブロックの左上隅に位置するブロック)を対象ブロックとして設定し(ステップS22)、対象ブロックがスキップブロックであるか非スキップブロックであるかを判定する(ステップS23)。また、ステップS23において、ブロックスキャン部141aは対象ブロックが最終ブロック(ブロックSB16)であるか否かを判定する。
Then, the skip area selection unit 24a finally sets the next block in the raster scan order of the block set as the target block in S22 (if the target macroblock is subjected to the processing of S22 for the first time, the upper left corner of the target macroblock). (Positioned block) is set as a target block (step S22), and it is determined whether the target block is a skip block or a non-skip block (step S23). In step S23, the block scanning unit 141a determines whether the target block is the last block (block SB16).
非スキップブロックであると判定した場合(ステップS23においてNO)、スキップ領域選択部24aは、スキップ情報と、順序情報と、を生成して動き探索部24bに出力する。動き探索部24bは、対象ブロックのスキップ情報および順序情報が入力されると、mvバッファ24dに記録されている導出済のmvまたは暫定mvに基づいてpmvを生成するとともに、フレームメモリ27に記録されている復号画像#26を参照して動き探索を行うことによりmvを導出する(ステップS24)。そして、生成したpmvと、導出したmvと、スキップ情報と、順序情報と、を関連づけてmvバッファ24dに記録する(ステップS25)。その後、ステップS29に進む。
If it is determined that the block is a non-skip block (NO in step S23), the skip region selection unit 24a generates skip information and order information and outputs the generated skip information and order information to the motion search unit 24b. When the skip information and order information of the target block are input, the motion search unit 24b generates pmv based on the derived mv or provisional mv recorded in the mv buffer 24d and is recorded in the frame memory 27. Mv is derived by performing motion search with reference to the decoded image # 26 (step S24). Then, the generated pmv, the derived mv, the skip information, and the order information are associated and recorded in the mv buffer 24d (step S25). Thereafter, the process proceeds to step S29.
一方、スキップブロックであると判定した場合(ステップS23においてYES)、スキップ領域選択部24aは、スキップ情報と、順序情報と、を生成してスキップ用mv推定部24cに出力する。スキップ用mv推定部24cは、対象ブロックのスキップ情報および順序情報が入力されると、mvバッファ24dに記録されている導出済のmvまたは暫定mv(対象ブロックの左、上、右上のブロックのmvまたは暫定mv)に基づいてpmvを生成し(ステップS26)、生成したpmvを対象ブロックの暫定mvとして、スキップ情報と、順序情報とに関連づけてmvバッファ24dに記録する(スキップS27)。
On the other hand, when it is determined that the block is a skip block (YES in step S23), the skip region selection unit 24a generates skip information and order information and outputs them to the skip mv estimation unit 24c. When the skip information and order information of the target block are input, the skip mv estimation unit 24c receives the derived mv or provisional mv recorded in the mv buffer 24d (mv of the block on the left, upper, and upper right of the target block). Alternatively, pmv is generated based on provisional mv) (step S26), and the generated pmv is recorded as provisional mv of the target block in the mv buffer 24d in association with skip information and order information (skip S27).
直前のステップS23の処理において最終ブロックでないと判定された場合(ステップS28においてNO)、ステップS22の処理に戻る。
If it is determined that the block is not the last block in the immediately preceding step S23 (NO in step S28), the process returns to step S22.
一方、直前のステップS23の処理において最終ブロックであると判定された場合(ステップS28においてNO)、スキップ領域選択部24aは、スキップブロックのmvを導出する処理を開始するトリガとなる信号を、スキップ用mv推定部24cに出力する(ステップS29)。そして、スキップ用mv推定部24cは、mvバッファ24dを参照し、ラスタスキャン順で最後にmvを推定したスキップブロックの次のスキップブロック(対象マクロブロックに初めてS30の処理を施す場合には、順序情報の値が最も小さいスキップブロック)について、mvを推定する(ステップS30)。このS30の処理は、動画像復号装置1のS8の処理と同様の処理である。
On the other hand, when it is determined that the block is the last block in the process of the immediately preceding step S23 (NO in step S28), the skip area selection unit 24a skips a signal serving as a trigger for starting the process of deriving mv of the skip block. It outputs to the mv estimation part 24c for use (step S29). Then, the skip mv estimating unit 24c refers to the mv buffer 24d, and skips the next skip block after the last mv estimated in the raster scan order (if the target macroblock is subjected to the processing of S30 for the first time, the order is determined). For the skip block having the smallest information value, mv is estimated (step S30). The process of S30 is the same as the process of S8 of the video decoding device 1.
そして、スキップ用mv推定部24cは、mvを推定したスキップブロックの暫定mv情報(mvバッファ24dに記録されている暫定mv情報)を、ステップS30において推定したmvにより、mv情報に更新する(ステップS31)。
The skip mv estimation unit 24c then updates the provisional mv information (provisional mv information recorded in the mv buffer 24d) of the skip block in which mv is estimated to mv information by using the mv estimated in step S30 (step S30). S31).
そして、スキップ用mv推定部24cは対象マクロブロック内のすべてのスキップブロックについてS30,S31の処理を施したか否かを判定する(ステップS32)。
Then, the skip mv estimation unit 24c determines whether or not the processing of S30 and S31 has been performed for all skip blocks in the target macroblock (step S32).
まだS30,S31の処理を施していないスキップブロックが存在すると判定した場合(ステップS32においてNO)、S30の処理に戻る。
If it is determined that there is a skip block that has not been subjected to the processes of S30 and S31 yet (NO in step S32), the process returns to S30.
一方、すべてのスキップブロックについてS30,S31の処理を施したと判定した場合(ステップS32においてYES)、スキップ用mv推定部24cは、mvバッファ24dを参照し、対象マクロブロックの各ブロックについて生成したmv(図5(c)の16個の各矢印が表わすmv)のmv情報を動き補償予測部24eに出力する。また、対象マクロブロックの各非スキップブロックについては、導出したmvのmv情報と、生成したpmvのpmv情報とを、mv符号化部24fに出力する。
On the other hand, when it is determined that the processing of S30 and S31 has been performed for all skip blocks (YES in step S32), the skip mv estimation unit 24c generates the blocks of the target macroblock with reference to the mv buffer 24d. mv information (mv represented by each of the 16 arrows in FIG. 5C) is output to the motion compensation prediction unit 24e. In addition, for each non-skip block of the target macroblock, the derived mv mv information and the generated pmv pmv information are output to the mv encoding unit 24f.
そして、動き補償予測部24eは、入力されたmv情報と、フレームメモリ27から読み出した復号画像#26と、に基づいて、動き補償予測画像を生成する(ステップS33)。
Then, the motion compensation prediction unit 24e generates a motion compensation prediction image based on the input mv information and the decoded image # 26 read from the frame memory 27 (step S33).
さらに、予測残差符号化部24gは、入力された動き補償予測画像とマクロブロック画像#23とから予測残差を生成してDCT変換、量子化および可変長符号化を行い、得られた符号化済みの予測残差データを可変長符号多重化部25に供給する(ステップS34)。
Further, the prediction residual encoding unit 24g generates a prediction residual from the input motion compensated prediction image and the macroblock image # 23, performs DCT transform, quantization, and variable length encoding, and obtains the obtained code The converted prediction residual data is supplied to the variable length code multiplexing unit 25 (step S34).
また、mv符号化部24fは、スキップ用mv推定部24cから入力されたmv情報とpmv情報とに基づき、差分mv情報を生成して符号化し、可変長符号多重化部25に供給する(ステップS35)。すなわち、mv符号化部24fは、非スキップブロックの差分mv情報を符号化するが、スキップブロックの差分mv情報は符号化しないこととなる。
Also, the mv encoding unit 24f generates and encodes difference mv information based on the mv information and pmv information input from the skip mv estimation unit 24c, and supplies the difference mv information to the variable length code multiplexing unit 25 (step). S35). That is, the mv encoding unit 24f encodes the difference mv information of the non-skip block, but does not encode the difference mv information of the skip block.
さらに、スキップ情報符号化部24hは、mvバッファ24dから各ブロックのスキップ情報を読み出して符号化し、可変長符号多重化部25に供給する(ステップS36)。
Further, the skip information encoding unit 24h reads the skip information of each block from the mv buffer 24d, encodes it, and supplies it to the variable length code multiplexing unit 25 (step S36).
最後に、可変長符号多重化部25は、MB符号化部24から入力されたMB符号化データ#24(すなわち、符号化済み予測残差、符号化済み差分mv情報、符号化済みスキップ情報)と、ヘッダ情報符号化部22から入力された符号化済ヘッダ情報#22と、を多重化して動画像符号化装置2の外部に出力する(ステップS37)。
Finally, the variable length code multiplexing unit 25 receives the MB encoded data # 24 (that is, the encoded prediction residual, the encoded difference mv information, and the encoded skip information) input from the MB encoding unit 24. And the encoded header information # 22 input from the header information encoding unit 22 are multiplexed and output to the outside of the video encoding device 2 (step S37).
<動画像符号化装置に関する付記事項>
以上、本実施形態に係る動画像符号化装置2について説明を行ったが、本発明は、以上の構成に限定されるものではない。 <Additional Notes on Video Encoding Device>
Although the movingpicture encoding apparatus 2 according to the present embodiment has been described above, the present invention is not limited to the above configuration.
以上、本実施形態に係る動画像符号化装置2について説明を行ったが、本発明は、以上の構成に限定されるものではない。 <Additional Notes on Video Encoding Device>
Although the moving
(付記事項1)
例えば、上記実施形態では、生成する符号化パラメータの具体例として動きベクトルを挙げたが、符号化パラメータは動きベクトルに限られず、その他の予測パラメータであってもよい。すなわち、符号化パラメータは、例えば、参照画像インデックス、参照画像リスト番号、Bピクチャにおける双方向予測を行うか否かを示すフラグなどであってもよい。また、動き補償予測においてフレーム間の輝度変化を補償する重み付け予測における重み係数も符号化パラメータとしてもよい。 (Appendix 1)
For example, in the above embodiment, a motion vector is described as a specific example of the encoding parameter to be generated. However, the encoding parameter is not limited to a motion vector, and may be another prediction parameter. That is, the encoding parameter may be, for example, a reference image index, a reference image list number, a flag indicating whether or not to perform bi-directional prediction on a B picture. In addition, a weighting coefficient in weighted prediction for compensating for a luminance change between frames in motion compensation prediction may be used as an encoding parameter.
例えば、上記実施形態では、生成する符号化パラメータの具体例として動きベクトルを挙げたが、符号化パラメータは動きベクトルに限られず、その他の予測パラメータであってもよい。すなわち、符号化パラメータは、例えば、参照画像インデックス、参照画像リスト番号、Bピクチャにおける双方向予測を行うか否かを示すフラグなどであってもよい。また、動き補償予測においてフレーム間の輝度変化を補償する重み付け予測における重み係数も符号化パラメータとしてもよい。 (Appendix 1)
For example, in the above embodiment, a motion vector is described as a specific example of the encoding parameter to be generated. However, the encoding parameter is not limited to a motion vector, and may be another prediction parameter. That is, the encoding parameter may be, for example, a reference image index, a reference image list number, a flag indicating whether or not to perform bi-directional prediction on a B picture. In addition, a weighting coefficient in weighted prediction for compensating for a luminance change between frames in motion compensation prediction may be used as an encoding parameter.
さらに、符号化パラメータには、予測残差を再構成するための変換係数(予測残渣変換係数)も含まれる。ここで、予測残差変換係数の個数は、周波数変換を行う単位領域の大きさ(単位領域に含まれる画素数)に依存する。例えば、単位領域が4画素×4ラインのブロックであり、4x4DCTを適用する場合、変換係数の個数は16個になる。一般に、予測残差変換係数の空間相関は高くないが、DC成分の空間相関は比較的高い。このことを利用して、以下のようにしてスキップブロックにおけるDC成分の予測残差変換係数の符号化を省略できる。
Furthermore, the encoding parameter includes a conversion coefficient (prediction residual conversion coefficient) for reconstructing the prediction residual. Here, the number of prediction residual transform coefficients depends on the size of the unit region for performing frequency transform (the number of pixels included in the unit region). For example, when the unit area is a block of 4 pixels × 4 lines and 4 × 4 DCT is applied, the number of transform coefficients is 16. In general, the spatial correlation of the prediction residual transform coefficient is not high, but the spatial correlation of the DC component is relatively high. By utilizing this fact, it is possible to omit encoding of the DC component prediction residual transform coefficient in the skip block as follows.
すなわち、スキップブロックにおけるDC成分の予測残差変換係数C_DCを式1により算出してもよい。
That is, the prediction residual transform coefficient C_DC of the DC component in the skip block may be calculated by Equation 1.

ここで、iは予測残差変換係数を算出するスキップブロックに隣接する8つのブロック(隣接ブロック)の各々を示すインデックスである。また、Liは、インデックスiが示す隣接ブロックと予測残差変換係数を算出するスキップブロックとの間の距離を示している。さらに、Ciは、インデックスiが示す隣接ブロックにおいてDCT変換により得られたDC成分の予測残差変換係数である。
Here, i is an index indicating each of the eight blocks (adjacent blocks) adjacent to the skip block for calculating the prediction residual transform coefficient. L i indicates the distance between the adjacent block indicated by index i and the skip block for calculating the prediction residual transform coefficient. Further, C i is a prediction residual transform coefficient of the DC component obtained by DCT transform in the adjacent block indicated by the index i.
すなわち、予測残差符号化部24gは、算出対象となるスキップブロックの各隣接ブロックにおけるDC成分の予測残差変化係数を該スキップブロックと該隣接ブロックとの間の距離に応じた重み付け平均を行うことにより、DC成分の予測残差変換係数を算出することになる。そして、予測残差符号化部24gは、スキップブロックについてはAC成分の予測残差変換係数のみを符号化することになる。
That is, the prediction residual encoding unit 24g performs a weighted average on the prediction residual change coefficient of the DC component in each adjacent block of the skip block to be calculated according to the distance between the skip block and the adjacent block. As a result, the prediction residual transform coefficient of the DC component is calculated. Then, the prediction residual encoding unit 24g encodes only the prediction residual transform coefficient of the AC component for the skip block.
なお、実施形態に係る符号化パラメータの生成処理を、上述した2以上の具体例(例えば、動きベクトルおよび参照画像インデックス)について行っても良い。
Note that the encoding parameter generation processing according to the embodiment may be performed on the above-described two or more specific examples (for example, motion vectors and reference image indexes).
(付記事項2)
上述した実施形態では、mv符号化部24fは、pmv情報と探索したmv情報とから差分mvを生成して符号化するものとしたが、差分mvではなく探索したmv情報そのものを符号化するようにしてもよい。 (Appendix 2)
In the embodiment described above, themv encoding unit 24f generates and encodes the difference mv from the pmv information and the searched mv information. However, the searched mv information itself is encoded instead of the difference mv. It may be.
上述した実施形態では、mv符号化部24fは、pmv情報と探索したmv情報とから差分mvを生成して符号化するものとしたが、差分mvではなく探索したmv情報そのものを符号化するようにしてもよい。 (Appendix 2)
In the embodiment described above, the
また、上述した実施形態において、非スキップブロックにおけるpmv情報の生成のために、スキップ用mv推定部24cが暫定mvを生成するものとしたが、暫定mvを生成する処理は必ずしも行わなくともよい。
In the above-described embodiment, the skip mv estimation unit 24c generates the temporary mv for generating the pmv information in the non-skip block. However, the process of generating the temporary mv does not necessarily have to be performed.
(付記事項3)
スキップ用mv推定部24cによるスキップブロックのmvの推定に、右や下に隣接する非スキップブロックのmvを用いるものとしたが、スキップブロックの左下や右下に隣接する非スキップブロックのmvを用いてもよい。 (Appendix 3)
The mv of the skip block is estimated by the skip mv estimation unit 24c using the mv of the non-skip block adjacent to the right or bottom, but the mv of the non-skip block adjacent to the lower left or lower right of the skip block is used. May be.
スキップ用mv推定部24cによるスキップブロックのmvの推定に、右や下に隣接する非スキップブロックのmvを用いるものとしたが、スキップブロックの左下や右下に隣接する非スキップブロックのmvを用いてもよい。 (Appendix 3)
The mv of the skip block is estimated by the skip mv estimation unit 24c using the mv of the non-skip block adjacent to the right or bottom, but the mv of the non-skip block adjacent to the lower left or lower right of the skip block is used. May be.
また、スキップ用mv推定部24cは、入力画像内のスキップブロックにおけるmvを以下のように推定してもよい。すなわち、参照画像内のコロケーティッドブロック(collocated block:入力画像内における当該スキップブロックの位置と参照画像内において同位置にあるブロック)のmvと、上下左右に隣接する4つのブロックのmvと、が利用可能である場合、推定するmvを、これら5つのmvの中央値にしてもよい。
Also, the skip mv estimation unit 24c may estimate mv in the skip block in the input image as follows. That is, mv of a collocated block (collocated block: a block located in the same position in the reference image and the position of the skip block in the input image), mv of four blocks adjacent vertically and horizontally, May be used, the estimated mv may be the median of these five mvs.
さらに、スキップ用mv推定部24cは、スキップブロックにおけるmvを以下のように推定してもよい。すなわち、推定するmvを、当該スキップブロックの上下左右に隣接する4つのブロックのmvと、当該スキップブロックを含むマクロブロック内の生成済み全mvの最頻値に係るmvとからなる5つのmvの中央値にしてもよい。
Furthermore, the skip mv estimation unit 24c may estimate mv in the skip block as follows. That is, the mv to be estimated is five mvs consisting of mvs of four blocks adjacent to the skip block in the top, bottom, left and right, and mvs related to the mode values of all generated mvs in the macroblock including the skip block The median value may be used.
(付記事項4)
上述した実施形態では、動き探索部24bがすべてのmvを導出したタイミングで、スキップ領域選択部24aがスキップ用mv推定部24cにmvの推定を開始させるものとしたが、タイミングはこれに限定されない。 (Appendix 4)
In the above-described embodiment, the skipregion selection unit 24a causes the skip mv estimation unit 24c to start estimating mv at the timing when the motion search unit 24b derives all mvs, but the timing is not limited to this. .
上述した実施形態では、動き探索部24bがすべてのmvを導出したタイミングで、スキップ領域選択部24aがスキップ用mv推定部24cにmvの推定を開始させるものとしたが、タイミングはこれに限定されない。 (Appendix 4)
In the above-described embodiment, the skip
すなわち、スキップ用mv推定部24cがスキップブロックのmvの推定を開始するタイミングは、各スキップブロックから規定の範囲内にある非スキップブロックにおけるmvを動き探索部24bがすべて導出したタイミングであってもよい。ここで、規定の範囲とは、スキップ用mv推定部24cがスキップブロックのmvを導出するために、mvを参照する可能性があるブロックが含まれる範囲を示している。すなわち、上述した実施形態に即して言えば、規定の範囲に含まれるブロックとは、mvを推定するスキップブロックに隣接する上下左右のブロックである。
That is, the timing at which the skip mv estimation unit 24c starts to estimate the mv of the skip block is the timing at which the motion search unit 24b derives all mv in the non-skip block within the specified range from each skip block. Good. Here, the specified range indicates a range including a block that may refer to mv in order for the skip mv estimation unit 24c to derive mv of the skip block. That is, according to the above-described embodiment, the blocks included in the specified range are the upper, lower, left, and right blocks adjacent to the skip block for estimating mv.
(付記事項5)
なお、上記実施形態における、マクロブロックは、H.264/MPEG-4 AVCの後継規格として提案されているHEVC(High Efficiency Video Coding)のLCU(最大コーディングユニット:Largest Coding Unit、コーディングツリー(Coding Tree)のrootと呼ばれることもある)に相当し、サブマクロブロックおよびブロックは、HEVCのCU(コーディングユニット:Coding Unit、コーディングツリーのleafと呼ばれることもある)、PU(Prediction Unit)、又はTU(transformation Unit)に相当するものである。 (Appendix 5)
The macroblock in the above embodiment is H.264. This corresponds to HEVC (High Efficiency Video Coding) LCU (maximum coding unit: sometimes called the root of a coding tree) proposed as a successor to H.264 / MPEG-4 AVC. The sub-macroblock and the block correspond to HEVC CU (Coding Unit, sometimes referred to as coding tree leaf), PU (Prediction Unit), or TU (transformation Unit).
なお、上記実施形態における、マクロブロックは、H.264/MPEG-4 AVCの後継規格として提案されているHEVC(High Efficiency Video Coding)のLCU(最大コーディングユニット:Largest Coding Unit、コーディングツリー(Coding Tree)のrootと呼ばれることもある)に相当し、サブマクロブロックおよびブロックは、HEVCのCU(コーディングユニット:Coding Unit、コーディングツリーのleafと呼ばれることもある)、PU(Prediction Unit)、又はTU(transformation Unit)に相当するものである。 (Appendix 5)
The macroblock in the above embodiment is H.264. This corresponds to HEVC (High Efficiency Video Coding) LCU (maximum coding unit: sometimes called the root of a coding tree) proposed as a successor to H.264 / MPEG-4 AVC. The sub-macroblock and the block correspond to HEVC CU (Coding Unit, sometimes referred to as coding tree leaf), PU (Prediction Unit), or TU (transformation Unit).
(動画像符号化装置2の利点)
以上のように、動画像符号化装置2は、スキップ領域選択部24aが、マクロブロック画像#23に含まれる各ブロックを、該ブロックに関するmvを符号化することにより得られる符号を符号化データ#1に含める非スキップブロックと、該ブロックに関するmvを符号化することにより得られる符号を符号化データ#1に含めないスキップ領域とに分類する。 (Advantages of the video encoding device 2)
As described above, in thevideo encoding device 2, the skip area selection unit 24a converts each block included in the macroblock image # 23 into a code obtained by encoding mv related to the block as encoded data #. The non-skip block to be included in 1 and the code obtained by encoding mv related to the block are classified into a skip area that is not included in the encoded data # 1.
以上のように、動画像符号化装置2は、スキップ領域選択部24aが、マクロブロック画像#23に含まれる各ブロックを、該ブロックに関するmvを符号化することにより得られる符号を符号化データ#1に含める非スキップブロックと、該ブロックに関するmvを符号化することにより得られる符号を符号化データ#1に含めないスキップ領域とに分類する。 (Advantages of the video encoding device 2)
As described above, in the
また、動き探索部24bが、マクロブロック画像#23に含まれる各非スキップブロックに関するmvを、予め規定された符号化順序が当該非スキップブロックよりも前の非スキップブロックに関するパラメータの値を参照して生成する。
In addition, the motion search unit 24b refers to the mv related to each non-skip block included in the macroblock image # 23 with reference to the parameter value related to the non-skip block whose encoding order is earlier than the non-skip block. To generate.
さらに、スキップ用mv推定部24cが、マクロブロック画像#23に含まれる各スキップ領域に関するmvを、動き探索部24bが生成したスキップブロックに関するmvの値であって、予め規定された符号化順序において当該スキップブロックの前後の非スキップブロックに関するmvの値を参照して導出した推定値に設定する。
Further, the skip mv estimation unit 24c sets the mv for each skip region included in the macroblock image # 23 as the mv value for the skip block generated by the motion search unit 24b, in a predetermined encoding order. The estimated value derived by referring to the value of mv regarding the non-skip blocks before and after the skip block is set.
したがって、動画像符号化装置2は、従来のmvの推定方法では用いていなかったブロックのmvを用いてmvを推定することができるので、より適切なmvを推定する可能性が高まることになる。すなわち、送信する符号化データの符号量を削減することができる。
Therefore, since the moving image encoding apparatus 2 can estimate mv using mv of a block that has not been used in the conventional mv estimation method, the possibility of estimating a more appropriate mv is increased. . That is, the code amount of the encoded data to be transmitted can be reduced.
本発明は上述した実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。すなわち、請求項に示した範囲で適宜変更した技術的手段を組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
The present invention is not limited to the above-described embodiment, and various modifications can be made within the scope indicated in the claims. That is, embodiments obtained by combining technical means appropriately changed within the scope of the claims are also included in the technical scope of the present invention.
なお、本発明に係る復号装置は、上記導出手段が、更に、既に当該導出手段により導出された他のスキップ領域に関するパラメータの値を参照して上記推定値を導出する、ことが望ましい。
In the decoding apparatus according to the present invention, it is desirable that the deriving unit further derives the estimated value with reference to parameter values relating to other skip areas already derived by the deriving unit.
上記の構成によれば、本発明の復号装置は、スキップ領域に関するパラメータの推定値を、非スキップ領域に関するパラメータの値とすでに導出されたスキップ領域に関するパラメータの値と、の両方を参照して導出する。
According to the above configuration, the decoding apparatus of the present invention derives an estimated value of a parameter related to a skip region with reference to both a parameter value related to a non-skip region and a parameter value related to a skip region already derived. To do.
したがって、本発明の復号装置によれば、スキップ領域に関するパラメータの推定精度をより向上させることができるというさらなる効果を奏する。
Therefore, according to the decoding device of the present invention, it is possible to further improve the estimation accuracy of the parameter relating to the skip region.
また、本発明に係る復号装置では、上記導出手段が各スキップ領域に関するパラメータを導出するために参照するパラメータは、当該スキップ領域から規定の範囲内に含まれる単位領域に関するパラメータに限られており、上記導出手段が各スキップ領域に関するパラメータの導出を開始するタイミングは、当該スキップ領域から上記規定の範囲内に含まれる非スキップ領域に関するパラメータを、上記復号手段が設定し終えた時点以降である、ことが望ましい。
Further, in the decoding device according to the present invention, the parameters referred to by the deriving means for deriving the parameters relating to each skip area are limited to the parameters relating to the unit area included in the specified range from the skip area, The timing at which the derivation means starts derivation of parameters relating to each skip area is after the time when the decoding means finishes setting parameters relating to non-skip areas included in the specified range from the skip area. Is desirable.
上記の構成によれば、本発明に係る復号装置は、復号順序で最初に位置するスキップ領域から規定の範囲内に含まれる非スキップ領域に関するパラメータを復号手段が設定し終えた時点以降において、復号手段と、導出手段と、に処理を並行して行わせることが可能になるというさらなる効果を奏する。
According to the above configuration, the decoding apparatus according to the present invention performs decoding after the point when the decoding unit finishes setting the parameters related to the non-skip area included in the specified range from the skip area first positioned in the decoding order. There is an additional effect that it is possible to cause the means and the derivation means to perform processing in parallel.
なお、スキップ領域と同じ部分領域(例えばマクロブロック)に含まれる非スキップ領域や、スキップ領域との距離が所定の閾値以下である非スキップ領域などが、規定の範囲内にある非スキップ領域に該当する。
Note that non-skip areas included in the same partial area as the skip area (for example, macroblock), non-skip areas whose distance from the skip area is equal to or less than a predetermined threshold, and the like correspond to non-skip areas within the specified range. To do.
本発明に係る復号装置では、上記復号画像が、複数の部分領域に分割されており、上記導出手段が、各スキップ領域に関するパラメータを、該スキップ領域と同一の部分領域に属する非スキップ領域に関するパラメータの値を参照して導出する、ことが望ましい。
In the decoding device according to the present invention, the decoded image is divided into a plurality of partial areas, and the deriving means sets parameters relating to each skip area as parameters relating to non-skip areas belonging to the same partial area as the skip area. It is desirable to derive with reference to the value of.
上記の構成によれば、本発明の復号装置は、部分領域に含まれる各スキップ領域に関するパラメータを、同じ部分領域に含まれる非スキップ領域に関するパラメータの値を参照することにより導出する。
According to the above configuration, the decoding device of the present invention derives the parameter related to each skip area included in the partial area by referring to the value of the parameter related to the non-skip area included in the same partial area.
したがって、本発明の復号装置は、スキップ領域に関するパラメータの推定精度をより向上させることができるというさらなる効果を奏する。
Therefore, the decoding device of the present invention has the further effect that the accuracy of parameter estimation regarding the skip region can be further improved.
なお、上記部分領域は、復号画像の全体を除く、復号画像に含まれる任意の部分領域であってよい。例えば、単位領域がブロックである場合、上記部分領域はマクロブロックであってもよいし、スライスであってもよい。
Note that the partial area may be an arbitrary partial area included in the decoded image excluding the entire decoded image. For example, when the unit area is a block, the partial area may be a macro block or a slice.
本発明に係る復号装置では、上記導出手段が各スキップ領域に関するパラメータの導出を開始するタイミングは、上記復号手段が該スキップ領域と同一の部分領域に属する非スキップ領域に関するパラメータをすべて設定し終えた時点以降である、ことが望ましい。
In the decoding apparatus according to the present invention, the timing at which the deriving unit starts deriving the parameters related to each skip region is such that the decoding unit has set all the parameters related to the non-skip regions belonging to the same partial region as the skip region. It is desirable to be after the time.
上記の構成によれば、本発明に係る復号装置は、スキップ領域に関するパラメータの導出を開始するタイミングで、パラメータを導出するためにすでに設定された非スキップ領域に関する任意のパラメータの値を参照することができるというさらなる効果を奏する。
According to the above configuration, the decoding apparatus according to the present invention refers to the value of an arbitrary parameter related to a non-skip area that has already been set in order to derive a parameter at the timing of starting the derivation of the parameter related to the skip area. There is a further effect of being able to.
また、本発明に係る復号装置では、上記導出手段が上記部分領域に属するスキップ領域に関するパラメータの導出を開始するタイミングにおいて既に上記復号手段が復号済みの当該部分領域に属する非スキップ領域に関するパラメータの最頻値に基づいて、上記導出手段は、当該部分領域に属する各スキップ領域に関するパラメータを導出することが望ましい。
Further, in the decoding device according to the present invention, at the timing when the deriving means starts derivation of the parameter related to the skip area belonging to the partial area, the maximum parameter of the non-skip area belonging to the partial area already decoded by the decoding means. It is desirable that the derivation means derives a parameter related to each skip area belonging to the partial area based on the frequent value.
上記の構成によれば、本発明に係る復号装置は、上記部分領域に属する各スキップ領域に関するパラメータが、同じ部分領域に含まれる各非スキップ領域について復号手段が設定済みのパラメータの最頻値に応じたものとなっている。したがって、本発明に係る復号装置は、導出するパラメータの精度を、より向上させることができるというさらなる効果を奏する。
According to the above configuration, in the decoding device according to the present invention, the parameter relating to each skip area belonging to the partial area is set to the mode value of the parameters set by the decoding means for each non-skip area included in the same partial area. It is a response. Therefore, the decoding device according to the present invention has the further effect that the accuracy of the derived parameter can be further improved.
また、本発明に係る復号装置では、上記復号順序は各部分領域においてラスタスキャン順であり、上記導出手段は、上記各スキップ領域に関するパラメータを、該スキップ領域の右、下、左下、および右下のいずれかに隣接する非スキップ領域に関するパラメータの値であって上記復号手段により設定されたパラメータの値に基づいて導出することが望ましい。
In the decoding device according to the present invention, the decoding order is a raster scan order in each partial region, and the derivation means sets parameters relating to the skip regions to the right, bottom, bottom left, and bottom right of the skip region. It is desirable to derive a parameter value related to a non-skip area adjacent to any one of the parameters and set based on the parameter value set by the decoding means.
上記の構成によれば、本発明に係る復号装置は、スキップ領域に関するパラメータを導出するために参照するパラメータが、該スキップ領域に隣接する非スキップ領域に関するパラメータとなっているので、導出する符号化パラメータの精度を、より向上させることができるというさらなる効果を奏する。
According to the above configuration, the decoding apparatus according to the present invention uses the encoding that is derived because the parameter referred to in order to derive the parameter related to the skip region is the parameter related to the non-skip region adjacent to the skip region. There is a further effect that the accuracy of the parameters can be further improved.
なお、本発明に係る復号装置では、上記部分領域はマクロブロックまたはスライスであることが望ましい。また、上記パラメータは、動き補償予測により予測画像を生成するために参照される予測パラメータであることが望ましい。上記予測パラメータとしては、例えば、動きベクトル、参照画像インデックス、参照画像リスト番号、双方向予測を行うか否かを示すフラグ、および、重み付け予測の重み係数が挙げられる。
In the decoding apparatus according to the present invention, the partial area is preferably a macroblock or a slice. The parameter is preferably a prediction parameter that is referred to in order to generate a prediction image by motion compensation prediction. Examples of the prediction parameters include a motion vector, a reference image index, a reference image list number, a flag indicating whether or not to perform bi-directional prediction, and a weighting coefficient for weighted prediction.
また、上記パラメータは、DC成分の予測残差変換係数であることが望ましい。
Also, the parameter is preferably a DC component prediction residual transform coefficient.
また、本発明に係る復号装置では、上記符号化データに含まれている上記符号には、上記予測パラメータを予測するための予測値と、上記予測パラメータの値、との差分値が含まれており、上記導出手段は、上記予測パラメータの導出を開始する前に、上記各スキップ領域に関する仮パラメータを、上記復号手段により設定された予測パラメータの値および上記導出手段がすでに導出した上記仮パラメータの値に基づいて生成し、上記復号手段は、各非スキップ領域に関する予測パラメータの値を、上記予測値と、上記符号を復号することにより得られる上記差分値とから算出するものであり、上記予測値を、上記復号手段により設定された予測パラメータの値および上記仮パラメータの値を参照することにより導出することが望ましい。
In the decoding device according to the present invention, the code included in the encoded data includes a difference value between a prediction value for predicting the prediction parameter and a value of the prediction parameter. The derivation means, before starting the derivation of the prediction parameter, determines the temporary parameter related to each skip region by using the value of the prediction parameter set by the decoding means and the provisional parameter already derived by the derivation means. And the decoding means calculates a prediction parameter value for each non-skip region from the prediction value and the difference value obtained by decoding the code. It is desirable to derive the value by referring to the value of the prediction parameter set by the decoding unit and the value of the temporary parameter.
上記の構成によれば、本発明に係る復号装置は、上記復号手段が各非スキップブロックに関する予測パラメータの予測値を、スキップ領域に関する仮パラメータの値に基づいて導出する。ここで、スキップ領域に関する仮パラメータの値とは、従来の復号装置のように、予め規定された復号順序がそのスキップ領域よりも前の非スキップ領域に関するパラメータの値を参照して導出されるものである。
According to the above configuration, in the decoding device according to the present invention, the decoding means derives the prediction value of the prediction parameter related to each non-skip block based on the value of the temporary parameter related to the skip region. Here, the value of the temporary parameter related to the skip area is derived by referring to the value of the parameter related to the non-skip area before the skip area in the predetermined decoding order as in the conventional decoding device. It is.
したがって、本発明に係る復号装置は、上記予測値を導出するために上記復号手段が予測パラメータを参照可能な非スキップ領域が少ない場合であっても、生成する予測値の精度を向上させることができることができるというさらなる効果を奏する。
Therefore, the decoding apparatus according to the present invention can improve the accuracy of the generated prediction value even when there are few non-skip regions in which the decoding means can refer to the prediction parameter in order to derive the prediction value. There is a further effect that it can be done.
また、本発明の符号化装置は、上記生成手段が生成したパラメータを符号化する符号化手段を備え、上記符号化手段は、上記導出手段が導出した推定値を符号化しないことが望ましい。
Also, it is desirable that the encoding device of the present invention includes an encoding unit that encodes the parameter generated by the generating unit, and the encoding unit does not encode the estimated value derived by the deriving unit.
上記の構成によれば、本発明に係る符号化装置は、復号装置に送信する符号化データ全体の符号量をさらに削減することができる。
According to the above configuration, the encoding apparatus according to the present invention can further reduce the code amount of the entire encoded data transmitted to the decoding apparatus.
本発明の符号化装置では、上記パラメータが動き補償予測により予測画像を生成するために参照される予測パラメータであり、上記符号化の対象となる画像と、上記予測パラメータに基づく当該画像の上記予測画像と、の差分画像を符号化することが望ましい。
In the encoding device of the present invention, the parameter is a prediction parameter referred to for generating a predicted image by motion compensation prediction, and the prediction of the image based on the encoding target image and the prediction parameter is performed. It is desirable to encode a difference image from the image.
上記の構成によれば、本発明の符号化装置は、予測精度の向上に伴い、符号化すべき差分画像の符号量が小さくなるので、符号化データ全体の符号量が削減されるというさらなる効果を奏する。
According to the above configuration, the encoding apparatus of the present invention has a further effect that the code amount of the entire encoded data is reduced because the code amount of the difference image to be encoded is reduced as the prediction accuracy is improved. Play.
本発明の符号化装置では、上記生成手段が、各非スキップ領域に関する予測パラメータを生成するために、当該予測パラメータを予測するための予測値を上記符号化順序が当該非スキップ領域よりも前の非スキップ領域に関する予測パラメータの値を参照することにより生成するものであり、上記符号化データに含める符号には、上記予測パラメータの値と、上記予測値の値、との差分値を符号化することにより得られる符号が含まれていることが望ましい。
In the encoding device of the present invention, in order for the generation means to generate a prediction parameter for each non-skip region, a prediction value for predicting the prediction parameter is calculated by using the encoding order before the non-skip region. It is generated by referring to the value of the prediction parameter related to the non-skip region, and the code included in the encoded data is encoded with a difference value between the value of the prediction parameter and the value of the prediction value. It is desirable that the code obtained by this is included.
上記の構成によれば、本発明の符号化装置は、予測パラメータの符号に代えて、差分値の符号を符号化データに含めるので、符号化データ全体の符号量が削減されるというさらなる効果を奏する。
According to the above configuration, since the encoding apparatus of the present invention includes the code of the difference value in the encoded data instead of the code of the prediction parameter, there is a further effect that the code amount of the entire encoded data is reduced. Play.
本発明の符号化装置では、上記導出手段が、上記予測パラメータの導出を開始する前に、上記各スキップ領域に関する仮パラメータを、上記生成手段により生成された予測パラメータの値および上記導出手段がすでに導出した上記仮パラメータの値に基づいて生成し、上記生成手段が、上記仮パラメータの値に基づいて上記予測値を生成することが望ましい。
In the encoding apparatus of the present invention, before the derivation means starts derivation of the prediction parameter, the temporary parameter relating to each skip region is obtained by using the value of the prediction parameter generated by the generation means and the derivation means. It is desirable to generate based on the derived value of the temporary parameter, and the generating means to generate the predicted value based on the value of the temporary parameter.
上記の構成によれば、本発明の符号化装置は、上記生成手段が各非スキップブロックに関する予測パラメータの予測値を、スキップ領域に関する仮パラメータの値に基づいて生成する。ここで、スキップ領域に関する仮パラメータの値とは、従来の符号化装置のように、予め規定された符号化順序がそのスキップ領域よりも前の非スキップ領域に関するパラメータの値を参照して導出されるものである。
According to the above configuration, in the encoding device of the present invention, the generating unit generates a prediction value of a prediction parameter related to each non-skip block based on a value of a temporary parameter related to a skip region. Here, the value of the temporary parameter related to the skip region is derived by referring to the value of the parameter related to the non-skip region before the skip region in a predetermined encoding order as in a conventional encoding device. Is.
したがって、予測値を生成するために上記生成手段が予測パラメータを参照可能な非スキップ領域が少ない場合であっても、生成する予測値の精度を向上させることができる。
Therefore, even when there are few non-skip regions in which the generation means can refer to the prediction parameters in order to generate a prediction value, the accuracy of the prediction value to be generated can be improved.
これにより、上記各単位領域に占める非スキップ領域の割合が少ない場合であっても、符号化すべき差分値の符号量を削減することができ、符号化データ全体の符号量が削減されるというさらなる効果を奏する。
Thereby, even when the ratio of the non-skip area in each unit area is small, the code amount of the difference value to be encoded can be reduced, and the code amount of the entire encoded data is further reduced. There is an effect.
本発明は、画像を符号化し符号化データを生成する符号化装置、そのような画像符号化装置を用いて生成された符号化データを復号する復号装置に好適に適用することができる。
The present invention can be suitably applied to an encoding device that encodes an image and generates encoded data, and a decoding device that decodes encoded data generated using such an image encoding device.
1 動画像復号装置(復号装置)
14 MB復号部
141 MB内mv復号部
141a ブロックスキャン部(分類手段)
141b mv推定部
141c スキップ情報復号部
141d スイッチ
141e mv復号部(復号手段)
141f スキップ用mv推定部(導出手段)
141g mvバッファ
2 動画像符号化装置(符号化装置)
24 MB符号化部(生成手段)
24a スキップ領域選択部(分類手段)
24b 動き探索部(生成手段)
24c スキップ用mv推定部(導出手段)
24d mvバッファ
24e 動き補償予測部
24f mv符号化部(符号化手段)
24g 予測残差符号化部(符号化手段)
24h スキップ情報符号化部 1 Video decoding device (decoding device)
14MB decoding unit 141 mv decoding unit 141 MB block scanning unit (classification means)
141bmv estimation unit 141c skip information decoding unit 141d switch 141e mv decoding unit (decoding means)
141f mv estimation unit for skipping (derivation means)
141g mv buffer 2 video encoding device (encoding device)
24 MB encoding unit (generation means)
24a Skip area selection unit (classification means)
24b Motion search unit (generation means)
24c mv estimation unit for skipping (derivation means)
24d mv buffer 24e motion compensation prediction unit 24f mv encoding unit (encoding means)
24g prediction residual encoding unit (encoding means)
24h Skip information encoding unit
14 MB復号部
141 MB内mv復号部
141a ブロックスキャン部(分類手段)
141b mv推定部
141c スキップ情報復号部
141d スイッチ
141e mv復号部(復号手段)
141f スキップ用mv推定部(導出手段)
141g mvバッファ
2 動画像符号化装置(符号化装置)
24 MB符号化部(生成手段)
24a スキップ領域選択部(分類手段)
24b 動き探索部(生成手段)
24c スキップ用mv推定部(導出手段)
24d mvバッファ
24e 動き補償予測部
24f mv符号化部(符号化手段)
24g 予測残差符号化部(符号化手段)
24h スキップ情報符号化部 1 Video decoding device (decoding device)
14
141b
141f mv estimation unit for skipping (derivation means)
24 MB encoding unit (generation means)
24a Skip area selection unit (classification means)
24b Motion search unit (generation means)
24c mv estimation unit for skipping (derivation means)
24g prediction residual encoding unit (encoding means)
24h Skip information encoding unit
Claims (16)
- 符号化データを復号することによって、復号画像を構成する各単位領域に関するパラメータを設定する復号装置において、
上記復号画像を構成する各単位領域を、該単位領域に関するパラメータを符号化することにより得られる符号が上記符号化データに含まれている非スキップ領域と、該単位領域に関するパラメータを符号化することにより得られる符号が上記符号化データに含まれていないスキップ領域とに分類する分類手段と、
上記復号画像に含まれる各非スキップ領域に関するパラメータを、上記符号化データに含まれている対応する符号を復号して得られた値に設定する復号手段と、
上記復号画像に含まれる各スキップ領域に関するパラメータを、上記復号手段により設定された非スキップ領域に関するパラメータの値であって、予め規定された復号順序において当該スキップ領域の前後に位置する非スキップ領域に関するパラメータの値を参照して導出した推定値に設定する導出手段と、を備えている、
ことを特徴とする復号装置。 In a decoding device that sets parameters relating to each unit area constituting a decoded image by decoding encoded data,
A non-skip area in which the code obtained by encoding the parameter relating to the unit area of each unit area constituting the decoded image is included in the encoded data, and the parameter relating to the unit area are encoded. Classification means for classifying the code obtained by the above into skip areas not included in the encoded data;
Decoding means for setting a parameter related to each non-skip area included in the decoded image to a value obtained by decoding a corresponding code included in the encoded data;
The parameter relating to each skip area included in the decoded image is a parameter value relating to the non-skip area set by the decoding means, and relates to the non-skip area located before and after the skip area in a predetermined decoding order. Deriving means for setting an estimated value derived with reference to the value of the parameter,
A decoding device characterized by the above. - 上記導出手段は、更に、既に当該導出手段により導出された他のスキップ領域に関するパラメータの値を参照して上記推定値を導出する、
ことを特徴とする請求項1に記載の復号装置。 The deriving means further derives the estimated value by referring to the parameter values relating to other skip regions already derived by the deriving means.
The decoding device according to claim 1. - 請求項1または2に記載の復号装置であって、
上記導出手段が各スキップ領域に関するパラメータを導出するために参照するパラメータは、当該スキップ領域から規定の範囲内に含まれる単位領域に関するパラメータに限られており、
上記導出手段が各スキップ領域に関するパラメータの導出を開始するタイミングは、当該スキップ領域から上記規定の範囲内に含まれる非スキップ領域に関するパラメータを、上記復号手段が設定し終えた時点以降である、ことを特徴とする復号装置。 The decoding device according to claim 1 or 2,
The parameters referred to by the derivation means for deriving the parameters related to each skip area are limited to the parameters related to the unit area included in the specified range from the skip area,
The timing at which the derivation means starts derivation of parameters relating to each skip area is after the time when the decoding means finishes setting parameters relating to non-skip areas included in the specified range from the skip area. A decoding device characterized by the above. - 請求項1から3のいずれか1項に記載の復号装置であって、
上記復号画像は、複数の部分領域に分割されており、
上記導出手段は、各スキップ領域に関するパラメータを、該スキップ領域と同一の部分領域に属する非スキップ領域に関するパラメータの値を参照して導出する、ことを特徴とする復号装置。 The decoding device according to any one of claims 1 to 3,
The decoded image is divided into a plurality of partial regions,
The decoding apparatus characterized in that the deriving means derives a parameter relating to each skip area with reference to a parameter value relating to a non-skip area belonging to the same partial area as the skip area. - 上記導出手段が各スキップ領域に関するパラメータの導出を開始するタイミングは、上記復号手段が該スキップ領域と同一の部分領域に属する非スキップ領域に関するパラメータをすべて設定し終えた時点以降である、ことを特徴とする請求項4に記載の復号装置。 The timing at which the deriving means starts derivation of the parameters related to each skip area is after the time when the decoding means finishes setting all the parameters related to the non-skip areas belonging to the same partial area as the skip area. The decoding device according to claim 4.
- 請求項4または5に記載の復号装置であって、
上記導出手段が上記部分領域に属するスキップ領域に関するパラメータの導出を開始するタイミングにおいて既に上記復号手段が復号済みの当該部分領域に属する非スキップ領域に関するパラメータの最頻値に基づいて、上記導出手段は、当該部分領域に属する各スキップ領域に関するパラメータを導出することを特徴とする復号装置。 The decoding device according to claim 4 or 5, wherein
Based on the mode value of the parameter relating to the non-skip area belonging to the partial area already decoded by the decoding means at the timing when the derivation means starts to derive the parameter relating to the skip area belonging to the partial area, A decoding device characterized by deriving parameters relating to each skip region belonging to the partial region. - 請求項4から6のいずれか1項に記載の復号装置であって、
上記復号順序は各部分領域においてラスタスキャン順であり、
上記導出手段は、上記各スキップ領域に関するパラメータを、該単位領域の下、右、左下、および右下のいずれかに隣接する非スキップ領域に関するパラメータであって上記復号手段により設定されたパラメータの値に基づいて導出することを特徴とする復号装置。 The decoding device according to any one of claims 4 to 6,
The decoding order is a raster scan order in each partial region,
The derivation means includes a parameter for each skip area, which is a parameter for a non-skip area adjacent to any one of the lower, right, lower left, and lower right of the unit area and set by the decoding means. Decoding device characterized by deriving on the basis of - 上記部分領域はマクロブロックまたはスライスであることを特徴とする請求項4から7のいずれか1項に記載の復号装置。 The decoding device according to any one of claims 4 to 7, wherein the partial area is a macroblock or a slice.
- 上記パラメータは、動き補償予測により予測画像を生成するために参照される予測パラメータであることを特徴とする請求項1から8のいずれか1項に記載の復号装置。 The decoding device according to any one of claims 1 to 8, wherein the parameter is a prediction parameter referred to for generating a predicted image by motion compensation prediction.
- 上記パラメータは、DC成分の予測残差変換係数であることを特徴とする請求項1から8のいずれか1項に記載の復号装置。 The decoding apparatus according to any one of claims 1 to 8, wherein the parameter is a prediction residual transform coefficient of a DC component.
- 請求項9に記載の復号装置であって、
上記符号化データに含まれている上記符号には、上記予測パラメータを予測するための予測値と、上記予測パラメータの値、との差分値が含まれており、
上記導出手段は、上記予測パラメータの導出を開始する前に、上記各スキップ領域に関する仮パラメータを、上記復号手段により設定された予測パラメータの値および上記導出手段がすでに導出した上記仮パラメータの値に基づいて生成し、
上記復号手段は、各非スキップ領域に関する予測パラメータの値を、上記予測値と、上記符号を復号することにより得られる上記差分値とから算出するものであり、上記予測値を、上記復号手段により設定された予測パラメータの値および上記仮パラメータの値を参照することにより導出することを特徴とする復号装置。 The decoding device according to claim 9, wherein
The code included in the encoded data includes a difference value between a prediction value for predicting the prediction parameter and a value of the prediction parameter,
Before the derivation means starts deriving the prediction parameter, the temporary parameter for each skip region is set to the value of the prediction parameter set by the decoding means and the value of the temporary parameter already derived by the derivation means. Based on
The decoding means calculates a value of a prediction parameter for each non-skip region from the prediction value and the difference value obtained by decoding the code, and the prediction value is calculated by the decoding means. A decoding apparatus, characterized by being derived by referring to a set prediction parameter value and the temporary parameter value. - 画像を構成する各単位領域に関するパラメータを符号化して符号化データとして出力する符号化装置において、
上記画像を構成する各単位領域を、該単位領域に関するパラメータを符号化することにより得られる符号を上記符号化データに含める非スキップ領域と、該単位領域に関するパラメータを符号化することにより得られる符号を上記符号化データに含めないスキップ領域とに分類する分類手段と、
上記画像に含まれる各非スキップ領域に関するパラメータを、予め規定された符号化順序が当該非スキップ領域よりも前の非スキップ領域に関するパラメータの値を参照して生成する生成手段と、
上記画像に含まれる各スキップ領域に関するパラメータを、上記生成手段により生成されたスキップ領域に関するパラメータの値であって、予め規定された符号化順序において当該スキップ領域の前後に位置する非スキップ領域に関するパラメータの値を参照して導出した推定値に設定する導出手段と、を備えている、ことを特徴とする符号化装置。 In an encoding device that encodes a parameter related to each unit region constituting an image and outputs the encoded data as encoded data,
A non-skip area including a code obtained by encoding a parameter related to the unit area in the encoded data for each unit area constituting the image, and a code obtained by encoding a parameter related to the unit area Classifying means for classifying into a skip area not included in the encoded data;
Generating means for generating a parameter related to each non-skip area included in the image with reference to a value of a parameter related to a non-skip area whose pre-defined encoding order is earlier than the non-skip area;
The parameter relating to each skip area included in the image is the parameter value relating to the skip area generated by the generating means, and the parameter relating to the non-skip area located before and after the skip area in a predetermined encoding order. Decoding means for setting an estimated value derived with reference to the value of the encoding device. - 請求項12に記載の符号化装置であって、
上記生成手段が生成したパラメータを符号化する符号化手段を備え、
上記符号化手段は、上記導出手段が導出した推定値を符号化しないことを特徴とする符号化装置。 The encoding device according to claim 12, comprising:
An encoding means for encoding the parameter generated by the generating means;
The encoding apparatus, wherein the encoding means does not encode the estimated value derived by the deriving means. - 請求項12または13に記載の符号化装置であって、
上記パラメータは動き補償予測により予測画像を生成するために参照される予測パラメータであり、上記符号化の対象となる画像と、上記予測パラメータに基づく当該画像の予測画像と、の差分画像を符号化することを特徴とする符号化装置。 The encoding device according to claim 12 or 13, comprising:
The parameter is a prediction parameter that is referred to in order to generate a prediction image by motion compensation prediction, and encodes a difference image between the image to be encoded and the prediction image of the image based on the prediction parameter. An encoding device characterized in that: - 請求項14に記載の符号化装置であって、
上記生成手段は、各非スキップ領域に関する予測パラメータを生成するために、当該予測パラメータを予測するための予測値を上記符号化順序が当該非スキップ領域よりも前の非スキップ領域に関する予測パラメータの値を参照することにより生成するものであり、
上記符号化データに含める符号には、上記予測パラメータの値と、上記予測値、との差分値を符号化することにより得られる符号が含まれていることを特徴とする符号化装置。 The encoding device according to claim 14, comprising:
The generation means generates a prediction parameter for each non-skip region, and generates a prediction value for predicting the prediction parameter by using a prediction parameter value for a non-skip region whose encoding order is earlier than the non-skip region. Is generated by referring to
The encoding device characterized in that the code included in the encoded data includes a code obtained by encoding a difference value between the prediction parameter value and the prediction value. - 請求項15に記載の符号化装置であって、
上記導出手段は、上記予測パラメータの導出を開始する前に、上記各スキップ領域に関する仮パラメータを、上記生成手段により生成された予測パラメータの値および上記導出手段がすでに導出した上記仮パラメータの値に基づいて生成し、
上記生成手段は、上記仮パラメータの値に基づいて上記予測値を生成することを特徴とする符号化装置。 The encoding device according to claim 15, comprising:
Before the derivation means starts derivation of the prediction parameter, the temporary parameter for each skip region is changed to the value of the prediction parameter generated by the generation means and the value of the temporary parameter already derived by the derivation means. Based on
The encoding device generates the predicted value based on the value of the temporary parameter.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010079580 | 2010-03-30 | ||
| JP2010-079580 | 2010-03-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011122659A1 true WO2011122659A1 (en) | 2011-10-06 |
Family
ID=44712353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/058008 WO2011122659A1 (en) | 2010-03-30 | 2011-03-30 | Encoder apparatus and decoder apparatus |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2011122659A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014087861A1 (en) * | 2012-12-06 | 2014-06-12 | ソニー株式会社 | Image processing device, image processing method, and program |
| WO2018173432A1 (en) * | 2017-03-21 | 2018-09-27 | シャープ株式会社 | Prediction image generation device, moving image decoding device, and moving image encoding device |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03217185A (en) * | 1990-01-23 | 1991-09-24 | Victor Co Of Japan Ltd | Method for transmitting motion vector information, transmitter and receiver for the same |
| JPH04234283A (en) * | 1990-08-28 | 1992-08-21 | Philips Gloeilampenfab:Nv | Method and apparatus for reducing data transmission capacity requirement of motion evaluating hardware and video system |
| JP2000023190A (en) * | 1998-06-26 | 2000-01-21 | Sony Corp | Motion vector generation method, picture encoder, motion compensation method, motion compensation device and provision medium |
| JP2006525766A (en) * | 2003-05-02 | 2006-11-09 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Biased motion vector interpolation to reduce video artifacts |
| JP2009021673A (en) * | 2007-07-10 | 2009-01-29 | Nippon Telegr & Teleph Corp <Ntt> | Coded parameter determining method, coded parameter determining device, coded parameter determining program and computer-readable recording medium recording the program |
| WO2009050658A2 (en) * | 2007-10-15 | 2009-04-23 | Nokia Corporation | Motion skip and single-loop encoding for multi-view video content |
-
2011
- 2011-03-30 WO PCT/JP2011/058008 patent/WO2011122659A1/en active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03217185A (en) * | 1990-01-23 | 1991-09-24 | Victor Co Of Japan Ltd | Method for transmitting motion vector information, transmitter and receiver for the same |
| JPH04234283A (en) * | 1990-08-28 | 1992-08-21 | Philips Gloeilampenfab:Nv | Method and apparatus for reducing data transmission capacity requirement of motion evaluating hardware and video system |
| JP2000023190A (en) * | 1998-06-26 | 2000-01-21 | Sony Corp | Motion vector generation method, picture encoder, motion compensation method, motion compensation device and provision medium |
| JP2006525766A (en) * | 2003-05-02 | 2006-11-09 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Biased motion vector interpolation to reduce video artifacts |
| JP2009021673A (en) * | 2007-07-10 | 2009-01-29 | Nippon Telegr & Teleph Corp <Ntt> | Coded parameter determining method, coded parameter determining device, coded parameter determining program and computer-readable recording medium recording the program |
| WO2009050658A2 (en) * | 2007-10-15 | 2009-04-23 | Nokia Corporation | Motion skip and single-loop encoding for multi-view video content |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014087861A1 (en) * | 2012-12-06 | 2014-06-12 | ソニー株式会社 | Image processing device, image processing method, and program |
| WO2018173432A1 (en) * | 2017-03-21 | 2018-09-27 | シャープ株式会社 | Prediction image generation device, moving image decoding device, and moving image encoding device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2679116C1 (en) | Video encoding device, video decoding device, video encoding method and video decoding method | |
| JP4908180B2 (en) | Video encoding device | |
| KR101911012B1 (en) | Method for managing a reference picture list, and apparatus using same | |
| KR101420957B1 (en) | Image encoding device, image decoding device, image encoding method, and image decoding method | |
| KR101473278B1 (en) | Image prediction encoding device, image prediction decoding device, image prediction encoding method, image prediction decoding method, image prediction encoding program, and image prediction decoding program | |
| US20110182523A1 (en) | Method and apparatus for image encoding/decoding | |
| US20100118945A1 (en) | Method and apparatus for video encoding and decoding | |
| JP4703449B2 (en) | Encoding method | |
| JP5194119B2 (en) | Image processing method and corresponding electronic device | |
| WO2012098845A1 (en) | Image encoding method, image encoding device, image decoding method, and image decoding device | |
| US9036918B2 (en) | Image processing apparatus and image processing method | |
| WO2009133845A1 (en) | Video encoding/decoding device and method | |
| JP2012028863A (en) | Moving image encoder | |
| WO2011122659A1 (en) | Encoder apparatus and decoder apparatus | |
| JP4719854B2 (en) | Moving picture encoding apparatus, moving picture encoding program, moving picture decoding apparatus, and moving picture decoding program | |
| JP5388977B2 (en) | Image encoding method, image decoding method, image encoding device, image decoding device, and program | |
| JP6608904B2 (en) | Video encoding apparatus and method | |
| JP6181242B2 (en) | Image decoding method | |
| JP5946980B1 (en) | Image decoding method | |
| JP5951915B2 (en) | Image decoding method | |
| JP5911982B2 (en) | Image decoding method | |
| JP5750191B2 (en) | Image decoding method | |
| JP2023549182A (en) | Method and apparatus for adaptive reordering of reference frames | |
| JP2018074603A (en) | Moving image encoding device and method | |
| JP2017079472A (en) | Moving image encoding device and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11762883 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11762883 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |