KR20200058642A - Vehicle and method for controlling thereof - Google Patents
Vehicle and method for controlling thereof Download PDFInfo
- Publication number
- KR20200058642A KR20200058642A KR1020180142492A KR20180142492A KR20200058642A KR 20200058642 A KR20200058642 A KR 20200058642A KR 1020180142492 A KR1020180142492 A KR 1020180142492A KR 20180142492 A KR20180142492 A KR 20180142492A KR 20200058642 A KR20200058642 A KR 20200058642A
- Authority
- KR
- South Korea
- Prior art keywords
- information
- obstacle
- vehicle
- unit
- pedal
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 25
- 230000001133 acceleration Effects 0.000 claims abstract description 63
- 238000001514 detection method Methods 0.000 claims description 118
- 230000009471 action Effects 0.000 abstract description 11
- 230000008859 change Effects 0.000 description 33
- 230000006870 function Effects 0.000 description 19
- 238000012545 processing Methods 0.000 description 7
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 5
- 229910052709 silver Inorganic materials 0.000 description 5
- 239000004332 silver Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 210000003195 fascia Anatomy 0.000 description 4
- 239000005357 flat glass Substances 0.000 description 4
- 230000009118 appropriate response Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 3
- 230000007257 malfunction Effects 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 206010041349 Somnolence Diseases 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 208000035278 mandibuloacral dysplasia progeroid syndrome Diseases 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 208000003443 Unconsciousness Diseases 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangements or mounting of propulsion unit control devices in vehicles
- B60K26/02—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- G06K9/00597—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2220/00—Monitoring, detecting driver behaviour; Signalling thereof; Counteracting thereof
- B60T2220/04—Pedal travel sensor, stroke sensor; Sensing brake request
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road, e.g. motorways, local streets, paved or unpaved roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/50—Barriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2302/00—Responses or measures related to driver conditions
- B60Y2302/03—Actuating a signal or alarm device
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/306—Pressure sensors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
본 발명은 장애물과의 충돌을 방지하기 위한 차량 및 그 제어 방법에 관한 것이다.The present invention relates to a vehicle for preventing collision with an obstacle and a control method therefor.
차량은 사람 또는 화물을 운송할 목적으로 차륜을 구동시켜 주행하는 기계로, 도로 위를 이동한다.Vehicles are machines that drive wheels for the purpose of transporting people or cargo, and move on roads.
최근 운전자의 편의를 위한 운전자 보조 기술들이 개발 중에 있다. 이러한 운전자 보조 기술들은 초음파센서, 이미지 센서, 레이저센서 및 라이더센서 중 적어도 하나의 센서를 이용하여 차량의 주행에 관련된 정보들 및 차량 주변의 장애물들을 인식하고 인식된 정보들을 기반으로 차량의 동작을 제어하거나, 인식된 정보들을 경보를 통해 운전자에게 제공한다. Recently, driver assistance technologies for driver convenience are under development. These driver assisting technologies use at least one of an ultrasonic sensor, an image sensor, a laser sensor, and a rider sensor to recognize information related to driving of the vehicle and obstacles around the vehicle, and control the operation of the vehicle based on the recognized information Or, the recognized information is provided to the driver through an alarm.
운전자는 경보가 발생됨에 의해 차량 주변의 장애물이 인식되면 장애물과의 충돌을 피하기 위해, 스티어링 휠을 조작하여 주행 방향을 전환하거나 브레이크 페달을 가압하여 제동을 수행하였다.When an obstacle around the vehicle is recognized by an alarm, the driver operates the steering wheel to change the driving direction or presses the brake pedal to brake.
이때 운전자가 당황하거나 긴장하여 브레이크 페달 대신 액셀러레이터 페달을 가압하거나 스티어링 휠의 방향 및 각도를 잘못 조작하는 문제가 발생하였다. 이로 인해 인식된 장애물과 충돌하거나 또한 적정량만큼 스티어링 휠을 조작하지 못함으로써 다른 장애물과 충돌하는 문제가 있었다.At this time, the driver was embarrassed or nervous, pressing the accelerator pedal instead of the brake pedal, or having a problem of incorrectly manipulating the direction and angle of the steering wheel. Due to this, there is a problem that it collides with the recognized obstacle or collides with another obstacle by not operating the steering wheel in an appropriate amount.
일 측면은 장애물과의 충돌 위험 상황에서 운전자의 오조작에 따른 브레이크 페달 및 액셀러레이터 페달의 동작을 제한 제어하고 오조작을 안내하는 차량 및 그 제어 방법을 제공한다.One aspect provides a vehicle and a control method for limiting control of the operation of the brake pedal and the accelerator pedal according to the driver's misoperation in the danger of collision with an obstacle and guiding the misoperation.
다른 측면은 운전자의 의도를 파악하고 브레이크 페달 및 액셀러레이터 페달의 조작 상태에 대응하는 정보를 운전자에게 안내하는 차량 및 그 제어 방법을 제공한다.Another aspect provides a vehicle and a control method for grasping the intention of the driver and guiding the driver with information corresponding to the operating state of the brake pedal and the accelerator pedal.
또 다른 측면은 도로의 종류에 기초하여 충돌 위험의 가중치를 조정하는 차량 및 그 제어 방법을 제공한다. Another aspect provides a vehicle for adjusting the weight of collision risk based on the type of road and a control method thereof.
일 측면에 따른 차량은, 주행 상황에 대응하는 정보를 획득하는 주행 상황 정보 획득부; 운전자의 의도에 대응하는 정보를 획득하는 의도 정보 획득부; 및 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 장애물과의 위치 정보에 기초하여 장애물과 충돌 위험이 존재하는지 판단하고, 장애물과 충돌 위험이 존재한다고 판단되면 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 판단된 운전자의 페달 조작의도와 판단된 필요 동작이 상이하면 페달 오조작으로 판단하는 제어부; 및 페달 오조작에 대응하는 경고를 출력하는 사운드 출력부를 포함한다.A vehicle according to an aspect includes: a driving situation information acquiring unit that acquires information corresponding to a driving situation; An intention information acquisition unit that acquires information corresponding to the driver's intention; And obtaining the position information of the obstacle based on the information obtained from the driving situation information acquisition unit, determining whether there is an obstacle and a collision risk based on the position information of the obstacle, and determining whether an obstacle and a collision risk exist if the obstacle is present. Determine the necessary action based on the position information, determine the driver's intention to operate the pedal based on the information obtained from the intention information acquisition unit, and if the determined driver's intention to operate the pedal is different from the determined required action, the pedal may be operated incorrectly. A control unit to determine; And a sound output unit outputting a warning corresponding to a pedal misoperation.
일 측면에 따른 차량의 주행 상황 획득부는 장애물과의 거리에 대한 정보를 검출하는 거리 검출부와, 주행 속도를 검출하는 속도 검출부를 포함하고, 제어부는 장애물과의 거리와 주행 속도에 기초하여 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나를 획득하고 획득된 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나에 기초하여 장애물과 출동 위험이 존재하는지 판단한다.The driving situation acquiring unit of the vehicle according to an aspect includes a distance detecting unit that detects information on a distance from an obstacle, and a speed detecting unit that detects a driving speed, and the control unit communicates with the obstacle based on the distance to the obstacle and the driving speed. Obtain at least one of a relative distance, a relative speed, and an estimated collision time, and determine whether an obstacle and a moving hazard exist based on at least one of the obtained relative distance, the relative speed, and the estimated collision time.
일 측면에 따른 차량의 주행 상황 획득부는 장애물과의 거리에 대한 정보를 검출하는 거리 검출부와, 주행 속도를 검출하는 속도 검출부를 포함하고, 제어부는 장애물과의 거리와 주행 속도에 기초하여 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간을 획득하고 획득된 장애물과의 상대 거리에 대응하는 위험도, 획득된 상대 속도에 대응하는 위험도 및 획득된 충돌 예상 시간에 대응하는 위험도 중 적어도 하나에 기초하여 장애물과 출동 위험이 존재하는지 판단한다.The driving situation acquiring unit of the vehicle according to an aspect includes a distance detecting unit that detects information on a distance from an obstacle, and a speed detecting unit that detects a driving speed, and the control unit communicates with the obstacle based on the distance to the obstacle and the driving speed. Obtaining an obstacle and an obstacle based on at least one of a relative distance, a relative speed, and a risk corresponding to a relative distance from the obtained obstacle and a risk corresponding to the obtained relative speed and a risk corresponding to the obtained estimated collision time. Determine if there is a risk of dispatch.
일 측면에 따른 차량의 주행 상황 획득부는 현재 위치에 대한 위치 정보를 수신하는 위치 수신부를 더 포함하고, 제어부는 수신된 위치 정보에 대응하는 도로의 종류를 확인하고 확인된 도로의 종류에 대응하는 가중치를 확인하고, 확인된 가중치에 기초하여 적어도 하나의 위험도를 조정한다.According to an aspect, the driving situation acquiring unit of the vehicle further includes a location receiving unit that receives location information about the current location, and the control unit checks the type of the road corresponding to the received location information and weights corresponding to the identified type of road. Check and adjust at least one risk based on the identified weights.
일 측면에 따른 차량의 의도 정보 획득부는 브레이크 페달에 인가된 압력을 검출하는 제1가압 검출부와, 액셀러레이터 페달에 인가된 압력을 검출하는 제2가압 검출부를 포함하고, 제어부는 제1가압 검출부 및 제2가압 검출부 중 어느 하나로부터 압력 정보가 수신되면 운전자의 페달 조작 의도로 판단한다.The vehicle intention information acquiring unit according to an aspect includes a first pressure detecting unit detecting a pressure applied to the brake pedal, and a second pressure detecting unit detecting a pressure applied to the accelerator pedal, and the control unit includes a first pressure detecting unit and a first pressure detecting unit. 2 When pressure information is received from any of the pressurization detection units, it is determined that the driver intends to operate the pedal.
일 측면에 따른 차량의 제어부는, 판단된 필요 동작이 제동 동작일 때 제2가압 검출부로부터 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어한다.The control unit of the vehicle according to an aspect limits and controls the acceleration amount by a preset ratio when pressure information is received from the second pressure detection unit when the determined necessary operation is the braking operation.
일 측면에 따른 차량의 제어부는, 판단된 필요 동작이 제동 동작일 때 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 한다.The control unit of the vehicle according to one aspect switches and controls the operation mode of the accelerator pedal when the determined necessary operation is the braking operation, so that the braking force is generated.
일 측면에 따른 차량의 제어부는 액셀러레이터 페달의 동작 모드를 전환 제어 중, 제1가압 검출부로부터 압력 정보가 수신되면 액셀러레이터 페달의 동작 모드를 복귀 제어하여 가속 제어가 수행되도록 한다.The control unit of the vehicle according to an aspect of the control mode changes the operation mode of the accelerator pedal, and when pressure information is received from the first pressure detection unit, the operation mode of the accelerator pedal is returned to control to perform acceleration control.
일 측면에 따른 차량의 제어부는 판단된 필요 동작이 가속 동작일 때 제1가압 검출부로부터 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어한다.The control unit of the vehicle according to one aspect limits control of the braking force by a preset ratio when pressure information is received from the first pressure detection unit when the determined necessary operation is an acceleration operation.
일 측면에 따른 차량의 제어부는, 제동력을 제한 제어 중, 제2가압 검출부로부터 압력 정보가 수신되면 제동력의 제한 해제 제어를 수행한다.The control unit of the vehicle according to an aspect performs limit release control of the braking force when pressure information is received from the second pressure detection unit during limit control of the braking force.
일 측면에 따른 차량의 의도 정보 획득부는 스티어링 휠의 조향각을 검출하는 조향각 검출부를 포함하고, 제어부는 장애물과 충돌 위험이 존재할 때 조향각 검출부를 통해 조향각 정보가 수신되면 운전자의 회피 의도가 존재한다고 판단한다.The intention information obtaining unit of the vehicle according to an aspect includes a steering angle detection unit that detects a steering angle of the steering wheel, and when the steering angle information is received through the steering angle detection unit when there is an obstacle and a collision risk, the controller determines that a driver's intention is to be avoided. .
일 측면에 따른 차량의 의도 정보 획득부는 운전자의 영상을 획득하는 영상 획득부를 포함하고, 제어부는 운전자의 영상에서 운전자의 눈을 인식하고 인식된 눈의 위치에 기초하여 운전자가 집중 상태인지를 판단하고, 운전자가 집중 상태라고 판단되면 페달 조작 의도를 판단한다.The intention information acquisition unit of the vehicle according to an aspect includes an image acquisition unit that acquires an image of the driver, and the control unit recognizes the driver's eye from the driver's image and determines whether the driver is focused based on the recognized eye position When it is determined that the driver is in a concentrated state, the intention to operate the pedal is determined.
일 측면에 따른 차량은 페달 오조작에 대응하는 경고를 출력하는 표시부를 더 포함한다.The vehicle according to one aspect further includes a display unit for outputting a warning corresponding to a pedal misoperation.
다른 측면에 따른 차량은, 주행 상황에 대응하는 정보를 획득하는 주행 상황 정보 획득부; 운전자의 의도에 대응하는 정보를 획득하는 의도 정보 획득부; 및 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 장애물과의 위치 정보에 기초하여 장애물과 충돌 위험이 존재하는지 판단하고, 장애물과 충돌 위험이 존재한다고 판단되면 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 판단된 운전자의 페달 조작의도와 판단된 필요 동작이 상이하면 운전자에 의해 조작된 페달에 의해 발생되는 출력을 제한 제어하는 제어부를 포함한다.A vehicle according to another aspect includes a driving situation information acquiring unit that acquires information corresponding to a driving situation; An intention information acquisition unit that acquires information corresponding to the driver's intention; And obtaining the position information of the obstacle based on the information obtained from the driving situation information acquisition unit, determining whether there is an obstacle and a collision risk based on the position information of the obstacle, and determining whether an obstacle and a collision risk exist if the obstacle is present. Determine the necessary action based on the location information, determine the intention of the driver's pedal operation based on the information obtained from the intention information acquisition unit, and operate by the driver if the determined driver's intention to operate the pedal is different from the determined intention It includes a control unit for controlling the output generated by the pedal.
다른 측면에 따른 차량의 의도 정보 획득부는 브레이크 페달에 인가된 압력을 검출하는 제1가압 검출부와, 액셀러레이터 페달에 인가된 압력을 검출하는 제2가압 검출부를 포함하고, 제어부는 제1가압 검출부 및 제2가압 검출부 중 어느 하나로부터 압력 정보가 수신되면 운전자의 페달 조작 의도로 판단한다.The vehicle's intention information acquiring unit according to another aspect includes a first pressure detection unit that detects a pressure applied to a brake pedal, and a second pressure detection unit that detects a pressure applied to an accelerator pedal, and the control unit includes a first pressure detection unit and a first pressure detection unit. 2 When pressure information is received from any of the pressurization detection units, it is determined that the driver intends to operate the pedal.
다른 측면에 따른 차량의 제어부는, 판단된 필요 동작이 제동 동작일 때 제2가압 검출부로부터 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어한다.The control unit of the vehicle according to another aspect limits and controls the acceleration amount by a preset ratio when pressure information is received from the second pressure detection unit when the determined necessary operation is the braking operation.
다른 측면에 따른 차량의 제어부는, 판단된 필요 동작이 제동 동작일 때 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하고, 액셀러레이터 페달의 동작 모드를 전환 제어 중, 제1가압 검출부로부터 압력 정보가 수신되면 액셀러레이터 페달의 동작 모드를 복귀 제어하여 가속 제어가 수행되도록 한다.The control unit of the vehicle according to another aspect switches the control mode of the accelerator pedal when the determined required action is the braking action to generate the braking force, and controls the operation mode of the accelerator pedal during changeover control, the pressure information from the first pressure detection unit When is received, the operation mode of the accelerator pedal is returned to control to perform acceleration control.
다른 측면에 따른 차량의 제어부는, 판단된 필요 동작이 가속 동작일 때 제1가압 검출부로부터 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하고, 제동력을 제한 제어 중, 제2가압 검출부로부터 압력 정보가 수신되면 제동력의 제한 해제 제어를 수행한다.The control unit of the vehicle according to another aspect, when pressure information is received from the first pressure detection unit when the determined necessary operation is an acceleration operation, limits and controls the braking force by a preset ratio, and controls the braking force by limiting the pressure from the second pressure detection unit When the information is received, the braking force limit release control is performed.
또 다른 측면에 따른 차량의 제어 방법은, 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 장애물과의 위치 정보에 기초하여 장애물과 충돌 위험이 존재하는지 판단하고, 장애물과 충돌 위험이 존재한다고 판단되면 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 판단된 필요 동작이 제동 동작일 때 액셀러레이터 페달의 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하고, 판단된 필요 동작이 가속 동작일 때 브레이크 페달의 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하고, 판단된 운전자의 페달 조작의도와 판단된 필요 동작이 상이하면 페달 오조작에 대응하는 경고를 출력한다.The vehicle control method according to another aspect acquires location information of an obstacle based on information obtained from a driving situation information acquisition unit, determines whether an obstacle and a collision risk exist based on the location information with the obstacle, and an obstacle When it is determined that there is a collision risk, the required operation is determined based on the location information of the obstacle, the driver's intention to operate the pedal is determined based on the information obtained from the intention information acquisition unit, and the determined necessary operation is the braking operation. When pressure information of the accelerator pedal is received, the amount of acceleration is limitedly controlled by a preset ratio, and when pressure information of the brake pedal is received when the determined necessary operation is an acceleration operation, the braking force is limitedly controlled by a preset ratio, and the determined driver's If the intention to operate the pedal is different from the determined required action, a warning corresponding to a malfunction of the pedal is output.
차량의 제어 방법은 판단된 필요 동작이 제동 동작일 때 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하는 것을 더 포함한다.The control method of the vehicle further includes switching and controlling the operation mode of the accelerator pedal when the determined required operation is the braking operation, so that a braking force is generated.
장애물과 출동 위험이 존재하는지 판단하는 것은, 장애물과의 거리와 주행 속도에 기초하여 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나를 획득하고, 획득된 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나에 기초하여 장애물과 출동 위험이 존재하는지 판단하는 것을 포함한다.Determining whether an obstacle and a moving hazard exists is based on the distance to the obstacle and the driving speed to obtain at least one of a relative distance to the obstacle, a relative speed, and an estimated collision time, and a relative distance to the acquired obstacle and a relative speed And determining whether there is an obstacle and a moving hazard based on at least one of the estimated collision time.
장애물과 출동 위험이 존재하는지 판단하는 것은, 차량의 현재의 위치 정보에 대응하는 도로의 종류를 확인하고, 확인된 도로의 종류에 대응하는 가중치를 확인하고, 장애물과의 거리와 주행 속도에 기초하여 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간을 획득하고, 획득된 장애물과의 상대 거리에 대응하는 위험도, 획득된 상대 속도에 대응하는 위험도 및 획득된 충돌 예상 시간에 대응하는 위험도 중 적어도 하나를 확인하고, 확인된 가중치에 기초하여 확인된 적어도 위험도를 조정하는 것을 포함한다.Determining whether there is an obstacle and a moving hazard is based on the type of road corresponding to the vehicle's current location information, the weight corresponding to the identified type of road, and based on the distance to the obstacle and the driving speed. Obtain a relative distance from an obstacle, a relative speed and an estimated collision time, and at least one of a risk corresponding to the relative distance from the acquired obstacle, a risk corresponding to the obtained relative speed, and a risk corresponding to the obtained estimated collision time And adjusting the identified at least risk based on the identified weights.
경고를 출력하는 것은, 사운드, 메시지 및 진동 중 적어도 하나를 출력하는 것을 포함한다.Outputting a warning includes outputting at least one of sound, message, and vibration.
본 발명은 장애물과의 충돌 전에 이루어지는 운전자의 조작 실수에 의한 액셀러레이터 페달의 가압에 대한 동작을 수행하지 않도록 함으로써 장애물과의 충돌을 방지할 수 있다.The present invention can prevent the collision with the obstacle by not performing an operation for the pressure of the accelerator pedal due to a driver's operation mistake made before the collision with the obstacle.
또한 본 발명은 필요 동작과 브레이크 페달이나 액셀러레이터 페달의 가압 상태가 상이하면 운전자에게 페달 오조작에 대한 정보를 안내함으로써 운전자가 스스로 조작 실수를 인지할 수 있도록 하고, 이를 통해 정상적인 페달 조작이 이루어지도록 유도할 수 있다.In addition, according to the present invention, when a required operation and a pressurization state of a brake pedal or an accelerator pedal are different, the driver can recognize an operation mistake by himself or herself by guiding the driver with information about a pedal misoperation, thereby inducing normal pedal operation. can do.
본 발명은 도로의 종류에 따라 충돌 위험에 대한 가중치를 조정하여 이면도로나 골목길에서 적극적으로 제어함으로써 장애물과의 충돌 사고를 줄일 수 있다.The present invention can reduce collision accidents with obstacles by actively controlling in a back road or an alleyway by adjusting weights for collision risk according to the type of road.
본 발명은 운전자와 차량 간의 유기적인 상호 보완이 이루어지도록 할 수 있다.The present invention enables organic mutual complementation between the driver and the vehicle.
이와 같이 본 발명은 충돌 방지 기능을 가진 차량의 품질 및 상품성을 향상시킬 수 있고 나아가 사용자의 만족도를 높일 수 있으며 사용자의 편리성, 신뢰성 및 차량의 안전성을 향상시킬 수 있고 제품의 경쟁력을 확보할 수 있다.As described above, the present invention can improve the quality and the productability of a vehicle having a collision prevention function, further increase the user's satisfaction, improve the user's convenience, reliability and vehicle safety, and secure the product's competitiveness. have.
도 1은 실시 예에 따른 차량의 내부 예시도이다.
도 2는 실시 예에 따른 차량의 제어 구성도이다.
도 3은 실시 예에 따른 차량의 제어부의 상세 구성도이다.
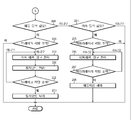
도 4a 및 4b는 실시 예에 따른 차량의 제어 순서도이다.
도 5는 실시 예에 따른 차량의 제어 순서를 설명하는 각 구성부의 동작 타이밍 예시도이다.1 is an exemplary interior view of a vehicle according to an embodiment.
2 is a control configuration diagram of a vehicle according to an embodiment.
3 is a detailed configuration diagram of a control unit of a vehicle according to an embodiment.
4A and 4B are control flowcharts of a vehicle according to an embodiment.
5 is an exemplary timing diagram of operation of each component describing a control sequence of a vehicle according to an embodiment.
명세서 전체에 걸쳐 동일 참조 부호는 동일 구성요소를 지칭한다. 본 명세서가 실시 예들의 모든 요소들을 설명하는 것은 아니며, 본 발명이 속하는 기술분야에서 일반적인 내용 또는 실시 예들 간에 중복되는 내용은 생략한다. 명세서에서 사용되는 '부, 장치'라는 용어는 소프트웨어 또는 하드웨어로 구현될 수 있으며, 실시 예들에 따라 복수의 '부, 장치'가 하나의 구성요소로 구현되거나, 하나의 '부, 장치'가 복수의 구성요소들을 포함하는 것도 가능하다.The same reference numerals refer to the same components throughout the specification. This specification does not describe all elements of the embodiments, and overlaps between general content or embodiments in the technical field to which the present invention pertains are omitted. The term 'part, device' used in the specification may be implemented in software or hardware, and according to embodiments, a plurality of 'parts, devices' may be implemented as one component, or a single 'part, device' may be used. It is also possible to include the components of the.
명세서 전체에서, 어떤 부분이 다른 부분과 "연결"되어 있다고 할 때, 이는 직접적으로 연결되어 있는 경우뿐 아니라, 간접적으로 연결되어 있는 경우를 포함하고, 간접적인 연결은 무선 통신망을 통해 연결되는 것을 포함한다.Throughout the specification, when a part is "connected" to another part, this includes not only a direct connection but also an indirect connection, and an indirect connection includes connecting through a wireless communication network. do.
또한 어떤 부분이 어떤 구성요소를"포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다.Also, when a part “includes” a certain component, this means that other components may be further included, rather than excluding other components, unless otherwise specified.
제 1, 제 2 등의 용어는 하나의 구성요소를 다른 구성요소로부터 구별하기 위해 사용되는 것으로, 구성요소가 전술된 용어들에 의해 제한되는 것은 아니다. Terms such as first and second are used to distinguish one component from other components, and the component is not limited by the above-mentioned terms.
단수의 표현은 문맥상 명백하게 예외가 있지 않는 한, 복수의 표현을 포함한다.Singular expressions include plural expressions, unless the context clearly has an exception.
각 단계들에 있어 식별부호는 설명의 편의를 위하여 사용되는 것으로 식별부호는 각 단계들의 순서를 설명하는 것이 아니며, 각 단계들은 문맥상 명백하게 특정 순서를 기재하지 않는 이상 명기된 순서와 다르게 실시될 수 있다. In each step, the identification code is used for convenience of explanation. The identification code does not describe the order of each step, and each step can be executed differently from the specified order unless a specific order is clearly stated in the context. have.
이하 첨부된 도면들을 참고하여 본 발명의 작용 원리 및 실시 예들에 대해 설명한다.Hereinafter, working principles and embodiments of the present invention will be described with reference to the accompanying drawings.
도 1은 실시 예에 따른 차량의 내부 예시도이다.1 is an exemplary interior view of a vehicle according to an embodiment.
차량(100)은 외장과 내장을 갖는 차체(Body)와, 차체를 제외한 나머지 부분으로 주행에 필요한 기계 장치가 설치되는 차대(Chassis)를 포함한다.The
차체의 외장은 프론트 패널, 본네트, 루프 패널, 리어 패널, 전후좌우의 도어, 전후좌우의 도어에 개폐 가능하게 마련된 윈도우 글래스를 포함한다. The exterior of the vehicle body includes a front panel, a bonnet, a roof panel, a rear panel, front and rear left and right doors, and window glass provided to be opened and closed on the front and rear left and right doors.
도 1에 도시된 바와 같이, 차체의 내장(110)은 탑승자가 앉는 시트와, 대시 보드와, 센터페시아와, 헤드유닛 등을 포함한다.As shown in FIG. 1, the
이러한 차량의 내부에는 주행 방향을 조절하기 위한 조향 장치의 스티어링 휠(111)과, 사용자의 제동 의도에 따라 사용자에 의해 가압되는 브레이크 페달(112)과, 사용자의 가속 의도에 따라 사용자에 의해 가압되는 액셀러레이터 페달(113)이 마련되어 있다. 아울러 차량의 종류에 따라, 차량의 내부에는 클러치 페달이 더 마련될 수 있다.Inside the vehicle, the
차량은 사용자의 사용 편의를 위한 차량용 단말기(114)를 더 포함한다.The vehicle further includes a
차량용 단말기(114))는 오디오 기능, 비디오 기능, 내비게이션 기능을 수행하는 오디오 비디오 내비게이션 장치(AVN)일 수 있다. 아울러 차량용 단말기(114)는 방송 기능(DMB 기능) 및 라디오 기능 중 적어도 하나를 더 수행할 수 있다.The
이러한 차량용 단말기는 사용자에 의해 선택된 적어도 하나의 기능에 대한 영상을 표시할 수 있다.Such a vehicle terminal can display an image of at least one function selected by a user.
아울러 차량용 단말기(114)는 자율 주행 모드 시 전후좌우 방향의 영상을 표시하는 것도 가능하고 장애물의 위치를 표시하는 것도 가능하다.In addition, the
이러한 차량용 단말기(114)는 대시 보드 상에 매립식 또는 거치식으로 설치될 수 있다. The
차량용 단말기(114)는 표시부로 디스플레이 패널을 포함할 수 있고, 입력부로 터치 패널을 더 포함할 수 있다.The
즉 차량용 단말기(114)는 디스플레이 패널만을 포함할 수 있고, 디스플레이 패널에 터치 패널이 일체화된 터치 스크린을 포함할 수도 있다.That is, the
차량용 단말기(114)는 디스플레이 패널만으로 구현된 경우, 센터페시아에 마련된 입력부를 이용하여 디스플레이 패널에 표시된 버튼을 선택받을 수 있다.When the
차량용 단말기(114)는 터치 스크린으로 구현된 경우, 터치 패널을 통해 사용자의 동작 명령을 직접 입력받을 수 있다.When implemented as a touch screen, the
차량용 단말기(114)는 내비게이션 기능이 선택되면 차량의 현재 위치부터 일정 범위 내의 지도 영상을 표시하고, 목적지가 입력되면 현재 위치부터 목적지까지의 경로 정보가 매치된 지도 정보를 표시한다.The
이러한 차량용 단말기(114)는 내비게이션 기능을 수행하면서 충돌 정보를 출력할 수 있다.The
예를 들어, 충돌 정보는 도로의 타입 정보, 주의를 요구하는 방향 정보 및 장애물 타입 정보 등을 포함할 수 있다.For example, the collision information may include road type information, direction information requiring attention, and obstacle type information.
차량용 단말기(114)는 스크린의 화면 색, 문자, 이모티콘 등을 이용하여 충돌 정보로 표시할 수 있다. The
차랑(100)은 각종 기능의 동작 명령을 입력받기 위한 입력부(115)를 더 포함할 수 있다.The
입력부(115)는 헤드 유닛 및 센터페시아에 마련될 수 있고, 각종 기능의 동작 온 오프 버튼, 각종 기능의 설정값을 변경하기 위한 버튼 등과 같은 적어도 하나의 물리적인 버튼을 포함할 수 있다. The
예를 들어, 입력부(115)는 복수 개의 경고음 중 어느 하나를 충돌 경고음으로 입력받을 수 있고, 복수 개의 색상 중 어느 하나를 충돌 경고등의 색상으로 입력받을 수 있으며, 페달 오조작의 경고음이나 표시등의 색상을 입력받을 수 있다.For example, the
입력부(115)는 차량용 단말기(114)의 표시부에 표시된 커서의 이동 명령 및 선택 명령 등을 입력하기 위한 조그 다이얼(미도시) 또는 터치 패드(미도시)를 더 포함하는 것도 가능하다. The
여기서 조그 다이얼 또는 터치 패드는 센터페시아 등에 마련될 수 있다.Here, the jog dial or the touch pad may be provided in a center fascia or the like.
차랑(100)은 헤드 유닛에 마련되고, 차량에서 수행 중인 기능에 대한 정보, 사용자에 의해 입력된 정보, 장애물에 대한 정보, 충돌 안내 정보 및 액셀러레이터 페달의 동작 모드를 표시하는 표시부(116)를 더 포함할 수 있다.The
표시부(116)는 브레이크 페달, 액셀러레이터 페달의 제어량 정보를 표시하는 것도 가능하다.The
표시부(116)는 장애물과의 충돌 정보를 표시할 수 있고, 페달의 오조작 정보를 표시할 수 있다.The
이러한 표시부(116)는 사이드 미러에 마련된 표시등, 클러스터에 마련된 표시등, 차체의 내장에 마련된 표시등 중 적어도 하나를 포함할 수 있다.The
사운드 출력부(117)는 장애물과의 충돌을 경고하고, 운전자의 졸음에 대한 위험을 경고하며, 페달 오조작에 대한 위험을 경고하기 위한 경고 정보를 출력한다. The
사운드 출력부(117)는 액셀러레이터 페달의 동작 모드의 변경을 안내하는 것도 가능하다.The
이러한 사운드 출력부(117)는 경고음, 안내음 등과 같은 소리를 출력하는 스피커를 포함할 수 있다.The
차량은 시트, 브레이크 페달, 액셀러레이터 페달에 마련되고 위험을 알리기 위한 진동 장치(미도시)를 더 포함할 수도 있다.The vehicle is provided on a seat, a brake pedal, and an accelerator pedal, and may further include a vibration device (not shown) for reporting a danger.
차량의 차대는 차체를 지지하는 틀로, 전후좌우에 각 배치된 차륜과, 전후좌우의 차륜에 구동력을 인가하기 위한 동력 장치, 차륜의 회전 각도를 변경하여 차량의 주행 방향이 변경되도록 하는 조향 장치, 전후좌우의 차륜에 제동력을 인가하기 위한 제동 장치 및 차량의 댐핑력을 조절하기 위한 현가 장치가 마련될 수 있다.The undercarriage of the vehicle is a frame for supporting the vehicle body, the wheels disposed at the front, rear, left and right, and the power unit for applying driving force to the front, rear, left, and right wheels. A braking device for applying braking force to the front, rear, left, and right wheels and a suspension device for adjusting the damping force of the vehicle may be provided.
차량(100)은 탑승자의 안전 및 편의를 위한 여러 가지 안전장치들을 포함할 수 있다. The
차량의 안정장치로는 자 차량 주변의 장애물과의 충돌을 방지하기 위한 충돌 방지 장치와, 충돌 등과 같은 위험 상황을 알리는 경고 장치와, 차량 충돌 시 운전자 등 탑승자의 안전을 목적으로 하는 에어백 제어 장치와, 차량의 가속 또는 코너링 시 차량의 자세를 제어하는 차량자세 안정 제어 장치(ESC: Electronic Stability Control), 급제동 시 차륜이 잠기는 현상을 방지하기 위한 ABS(Anti-lock Brake System) 등 여러 종류의 안전장치들이 있다.The vehicle stabilizer includes a collision prevention device for preventing collisions with obstacles around the vehicle, a warning device for notifying a dangerous situation such as a collision, and an airbag control device for safety of the occupant such as a driver in the event of a vehicle collision. , Electronic Stability Control (ESC) that controls the attitude of the vehicle when accelerating or cornering the vehicle, and various types of safety devices such as ABS (Anti-lock Brake System) to prevent the wheels from locking during sudden braking. There are.
경보장치는 자 차로의 이탈을 알리는 차로 이탈 경보 장치(LDWS: Lane Departure Warning System)와, 운전자가 졸음 상태임을 알리는 졸음 경보 장치, 자 차로의 좌우 차로에 위치한 타 차량과의 충돌 위험성을 알리는 사각지대 경보 장치(Blind Spot Warning System: BSW, BSA 또는 BSD), 자 차로의 전방에 위치한 타 차량과의 충돌 위험성을 알리는 전방 충돌 경보 장치(Forward Collision Warning System: FCWS, Back Warning System: BWS)를 포함할 수 있다.The warning device is the Lane Departure Warning System (LDWS) that signals the departure of the lane, the drowsiness warning device that informs the driver that the driver is drowsy, and the blind spot that signals the danger of collision with other vehicles located in the left and right lanes of the lane. Includes a warning device (Blind Spot Warning System: BSW, BSA or BSD), a Forward Collision Warning System (FCWS, Back Warning System: BWS) that alerts you of the danger of collision with other vehicles located in front of your lane. Can be.
도 2는 실시 예에 따른 차량의 제어 구성도이다.2 is a control configuration diagram of a vehicle according to an embodiment.
차량은 주행 상황 정보 획득부(120), 의도 정보 획득부(130), 제어부(140), 저장부(141), 제동 장치(150), 조향 장치(160) 및 동력 장치(170)를 포함한다. The vehicle includes a driving situation
주행 상황 정보 획득부(120)는 차량의 주변 상황에 대한 주행 상황 정보를 획득한다.The driving situation
여기서 주행 상황 정보는 주행 경고 상황 및 주행 경고 상황과 관련된 정보 등을 포함할 수 있다.Here, the driving situation information may include a driving warning situation and information related to the driving warning situation.
이러한 주행 상황 정보 획득부는, 차량의 주변의 영상을 획득하는 제1영상 획득부(121)와, 차량의 주변의 장애물을 검출하고 검출된 장애물과의 거리를 검출하는 거리 검출부(122)와, 차량의 현재 위치를 수신하는 위치 수신부(123)와, 자 차량의 주행속도를 검출하기 위한 속도 검출부(124)를 포함할 수 있다.The driving situation information acquiring unit includes a first
제1영상 획득부(121)는 차량이 주행하는 도로의 영상을 획득한다. 이러한 제1영상 획득부(121)는 차량의 전방의 도로의 영상을 획득할 수 있다.The first
제1영상 획득부(121)는 차량 전방의 영상을 획득하는 전방 카메라뿐만 아니라 차량 좌우 측방의 영상을 획득하는 좌측 카메라와 우측 카메라, 차량 후방의 영상을 획득하는 후방 카메라 중 적어도 하나를 더 포함하는 것도 가능하다.The first
즉 제1영상 획득부(121)는 자 차량의 현재 위치에서 자 차량 외부의 환경, 특히 차량이 주행하는 도로 정보 및 그 주변의 자 차량의 전방, 좌우의 측방의 장애물의 정보를 촬영하고 촬영된 정보를 전기적 신호로 변환하고 변환된 전기적 신호에 대응하는 영상 정보를 획득하고 획득된 영상 정보를 제어부(140)에 전송한다.That is, the first
제1영상 획득부(121)는 카메라로, CCD 또는CMOS 이미지 센서를 포함할 수 있고, KINECT(RGB-D 센서), TOF(Structured Light Sensor), 스테레오 카메라(Stereo Camera) 등과 같은 3차원 공간 인식 센서를 포함할 수도 있다.The first
제1영상 획득부(121)는 차량 내부의 프론트 윈도 글래스에 마련되어 차량의 외부를 촬영하도록 마련될 수도 있고, 차량 내부의 룸미러에 마련되어 차량의 외부를 촬영하도록 마련될 수도 있으며, 외부에 노출되도록 루프 패널에 마련될 수도 있다. The first
제1영상 획득부(121)는 후방 카메라, 블랙 박스의 카메라일 수 있고, 자율 주행을 위해 마련된 자율 주행 제어 장치의 카메라일 수 있다.The first
거리 검출부(122)는 차량의 프론트 패널, 루프 패널 및 리어 패널 중 적어도 하나의 패널에 마련될 수 있다.The
거리 검출부(122)는 자 차량의 위치를 기준으로 전후좌우 방향의 장애물의 존재 여부 및 장애물의 위치를 검출한다. 여기서 위치는 거리와 방향을 포함할 수 있다.The
좀 더 구체적으로 거리 검출부(122)는 자 차량의 외부에 위치하는 장애물, 예를 들면 자 차량의 전방에서 주행하는 전방 차량과, 도로 주변에 설치된 구조물 등과 같은 정지물체와, 반대 차선에서 다가오는 타 차량 등을 검출한다. 즉 거리 검출부(122)는 자 차량의 전방, 후방, 좌우의 측방에 위치한 장애물의 검출 정보를 출력한다.More specifically, the
이러한 거리 검출부는 레이더(radar) 센서 또는 라이다(Light detection and Ranging, Lidar) 센서를 포함할 수 있다.The distance detection unit may include a radar sensor or a light detection and ranging (Lidar) sensor.
레이더(Radar) 센서는 발신 및 수신을 같은 장소에서 행할 때, 전파의 방사에 의하여 생긴 반사파를 이용하여 물체의 위치 및 거리를 검출하는 센서이다.A radar sensor is a sensor that detects the position and distance of an object using reflected waves generated by radiation of radio waves when transmitting and receiving in the same place.
라이다(LiDAR: Light Detection And Ranging)센서는 레이저 레이다(Laser Radar) 원리를 이용한 비접촉식 거리 검출 센서이다.The LiDAR (Light Detection And Ranging) sensor is a non-contact distance detection sensor using the laser radar principle.
이러한, 라이다 센서는 레이더(RaDAR: Radio Detecting And Ranging) 센서에 비해 횡방향에 대한 검출 정확도가 높기 때문에 전방에 통로가 존재하는지 판단하는 과정의 정확도를 높일 수 있다.Since the detection accuracy of the lateral direction is higher than that of the radar (RaDAR: Radio Detecting And Ranging) sensor, the accuracy of the process of determining whether a passage exists in the front may be increased.
여기서 레이저는 단일레이저 펄스일 수 있다.Here, the laser may be a single laser pulse.
거리 검출부(122)는 초음파 센서 또는 레이더 센서를 포함할 수도 있다.The
초음파 센서는 초음파를 일정시간 발생시킨 뒤 물체에 반사되어 돌아오는 신호를 검출한다.The ultrasonic sensor detects a signal that is reflected by an object and then returns after generating ultrasonic waves for a certain time.
초음파 센서는 근거리 범위 내에서 보행자 등의 장애물의 유무를 판별하는데 사용될 수 있다.The ultrasonic sensor may be used to determine the presence or absence of obstacles such as pedestrians within a short range.
위치 수신부(123)는 차량의 현재 위치에 대응하는 위치 정보를 수신한다.The
이러한 위치 수신부(123)는 GPS(Global Positioning System) 수신기를 포함할 수 있다.The
여기서 GPS(Global Positioning System) 수신기는 복수의 GPS 위성의 신호를 수신하는 안테나 모듈 및 신호처리부를 포함한다. Here, the Global Positioning System (GPS) receiver includes an antenna module and a signal processor that receives signals from a plurality of GPS satellites.
안테나 모듈은 차량의 외장에 마련된 안테나에 마련될 수 있다.The antenna module may be provided on an antenna provided on the exterior of the vehicle.
신호 처리부는 복수의 GPS위성의 위치 신호에 대응하는 거리 및 시간 정보를 이용하여 현재의 위치를 획득하는 소프트웨어와, 획득된 차량의 위치 정보를 출력하는 출력부를 포함한다.The signal processing unit includes software for acquiring a current location using distance and time information corresponding to location signals of a plurality of GPS satellites, and an output unit for outputting the location information of the acquired vehicle.
속도 검출부(124)는 자 차량의 주행 속도를 검출하기 위한 것으로, 속도 검출부(124)는 차량의 복수 개의 휠에 각각 마련된 복수 개의 휠 속도 센서를 포함할 수 있고, 차량의 가속도를 검출하는 가속도 센서를 포함할 수 있다.The
의도 정보 획득부(130)는 운전자의 의도를 인식하기 위한 의도 정보를 획득한다.The intention
여기서 운전자의 의도는, 운전자의 의식적 행동 또는 무의식적 행동에 의해 나타나는 것으로, 운전자의 페달 조작 의도 및 회피 의도를 포함할 수 있고, 운전자의 시선을 포함할 수 있다. Here, the driver's intention is expressed by the driver's conscious behavior or unconscious behavior, and may include the driver's intention to operate the pedal and the intention to avoid, and may include the driver's gaze.
의도 정보 획득부(130)는 제2영상 획득부(131), 제1가압 검출부(132), 제2가압 검출부(133) 및 조향각 검출부(134)를 포함할 수 있다.The intention
제2영상 획득부(131)는 운전자의 영상을 획득한다.The second
제2영상 획득부(131)는 운전자의 영상 중 운전자의 얼굴 및 시선에 대한 영상을 획득할 수 있다. The second
제2영상 획득부(131)는 카메라로, CCD 또는CMOS 이미지 센서를 포함할 수 있다.The second
제2영상 획득부(150)는 전면의 윈도우 글래스에 마련되되 차량 내부의 윈도 글래스에 마련될 수도 있고, 차량 내부의 룸 미러에 마련될 수도 있다. The second
제1가압 검출부(132)는 브레이크 페달(112)에 인가된 압력을 검출하고 검출된 압력에 대응하는 가압 정보를 출력한다.The first
제1가압 검출부(132)는 압력 센서 및 위치 센서 중 적어도 하나를 포함할 수 있다.The first
제2가압 검출부(133)는 액셀러레이터 페달(113)에 인가된 압력을 검출하고 검출된 압력에 대응하는 가압 정보를 출력한다.The second
제2가압 검출부(133)는 압력 센서 및 위치 센서 중 적어도 하나를 포함할 수 있다.The second
조향각 검출부(134)는 차량의 주행 방향을 인식하기 위한 스티어링 휠의 조향각을 검출하고 검출된 조향각에 대응하는 조향각 정보를 출력한다.The steering
조향각 검출부(134)는 스티어링 휠의 조향 각속도를 검출하는 각속도 센서를 포함할 수 있고, 차량의 요 모멘트를 검출하는 요 레이트 센서를 포함할 수 있다.The steering
차량은 스티어링 휠에 인가된 조향 토크 또는 조향 장치(160)에서 출력되는 조향 토크를 검출하는 토크 검출부(미도시)를 더 포함할 수 있다.The vehicle may further include a torque detection unit (not shown) that detects the steering torque applied to the steering wheel or the steering torque output from the
차량은 차량에서 발생되는 제동력을 검출하는 제동력 검출부(미도시)를 포함할 수 있다.The vehicle may include a braking force detection unit (not shown) that detects braking force generated by the vehicle.
제동력 검출부는 제동 장치(150)의 유압을 검출하는 압력 검출부를 포함할 수 있다.The braking force detection unit may include a pressure detection unit that detects the hydraulic pressure of the
제어부(140)는 주행 정보 획득부(120)에서 획득된 주행 정보에서 기초하여 충돌 위험 상황이 발생하였는지에 대한 충돌 여부를 인식하고, 의도 정보 획득부(130)에서 획득된 의도 정보에서 기초하여 페달 조작 의도 및 회피 의도 중 적어도 하나에 대한 운전자 의도를 인식하며, 운전자가 바라보는 방향 및 대상을 인식할 수 있다. The
좀 더 구체적으로 제어부(140)는 제1영상 획득부(121)에서 획득된 영상 신호를 수신하고 수신된 영상 신호의 신호 처리를 수행하되 신호 처리의 속도를 향상시키기 위하여 사이즈와 포맷을 변경하고, 화질 개선 작업을 수행할 수 있다.More specifically, the
제어부(140)는 영상 신호에 대하여 클리어링 처리 및 노이즈 제거 처리를 수행하여 영상 정보를 생성하고 생성된 영상 정보에 기초하여 차선 및 장애물을 인식한다. The
그리고 제어부(140)는 영상 정보에서 물체를 분해하는 비전기술들을 적용하여 영상 정보로부터 물체들을 장애물로 추출한다.In addition, the
제어부(140)는 영상 정보에 기초하여 장애물의 크기와 위치를 식별하고 장애물의 위치 및 궤적을 계산하여 장애물이 자전거, 보행자, 표지판, 신호등 및 타 차량인지 구별하는 것도 가능하다. The
제어부(140)는 거리 검출부(122)에 의해 검출된 점 데이터를 군집화하여 장애물의 형상 정보 및 위치 정보를 인식한다. 아울러 제어부(140)는 장애물의 형상 정보에 기초하여 장애물의 타입을 구별하는 것도 가능하다.The
즉 제어부(140)는 자 차량과 장애물 간의 방향, 거리 및 점의 양으로부터의 장애물의 형상 정보 및 위치 정보를 인식할 수 있다.That is, the
제어부(140)는 장애물 인식 시에 제1영상 획득부(121)에서 검출된 영상 정보에 기초하여 거리 검출부(122)에 의해 검출된 장애물의 형상 정보 및 위치 정보를 보정하는 것도 가능하다.When the obstacle is recognized, the
이와 같이, 제어부(140)는 제1영상획득부(121)에서 획득된 영상 정보와 거리 검출부(122)에서 검출된 검출 정보 중 적어도 하나에 기초하여 적어도 하나의 장애물의 위치 정보를 획득하고, 획득된 적어도 하나의 장애물의 위치 정보에 기초하여 충돌 위험이 있는 경고 대상의 장애물에 대한 장애물의 위치 정보를 획득할 수 있다.As such, the
제어부(140)는 장애물의 위치 정보 중 경고 대상의 장애물의 위치 정보에 기초하여 충돌 경고 정보가 출력되도록 표시부(116), 사운드 출력부(117) 및 차량용 단말기(114) 중 적어도 하나의 동작을 제어한다. 여기서 장애물의 위치 정보는 장애물과의 거리 정보 및 방향 정보를 포함할 수 있다. 장애물의 방향 정보는 차량의 위치를 기준으로 결정될 수 있다.The
제어부(140)는 장애물의 위치 정보에 기초하여 제동이 필요한 상황인지, 가속이 필요한 상황인지, 조향이 필요한 상황인지를 인식한다.Based on the position information of the obstacle, the
제어부(140)는 자 차량의 위치를 기준으로 전후좌우에 존재하는 장애물의 위치와 장애물의 타입을 인식할 수 있고, 자 차량과 충돌 위험성이 있는 장애물의 위치 및 장애물의 타입을 인식할 수 있다.The
제어부(140)는 내비게이션 기능 수행 시 현재 위치 정보와 목적지 정보를 확인하고 확인된 목적지의 정보와 현재 위치 정보에 기초하여 현재 위치에서 목적지까지 경로 정보를 탐색하고 탐색된 경로 정보와 지도 정보에 기초하여 지도에 경로가 매칭된 내비게이션 정보의 표시를 제어한다.When performing the navigation function, the
제어부(140)는 주행 중 내비게이션 정보와 현재 위치 정보에 기초하여 현재 주행 중인 도로의 종류를 확인하고 확인된 도로의 종류에 대응하는 가중치를 확인한다. 여기서 가중치는 충돌 위험에 대한 가중치이다.The
도로의 종류에는 고속 도로, 일반 국도, 특별 시도, 광역 시도, 지방도, 시도, 군도, 구도가 있으며, 스쿨존, 실버존, 이면도로 및 골목길 등이 더 있다.The types of roads include expressways, general roads, special roads, wide-area roads, local roads, roads, islands, and old roads. School zones, silver zones, back roads, and alleyways are more.
가중치는 도로의 크기가 클수록 낮을 수 있다. 즉 가중치는 작은 도로일수록 클 수 있다. The weight may be lower as the road size increases. That is, the smaller the road, the greater the weight.
예를 들어, 고속도로의 가중치보다 구도의 가중치가 더 높을 수 있고, 구도의 가중치보다 이면도로의 가중치가 더 높을 수 잇다. For example, the weight of the composition may be higher than the weight of the highway, and the weight of the back road may be higher than the weight of the highway.
고속 도로, 일반 국도, 특별 시도, 광역 시도, 지방도, 시도, 군도, 구도의 가중치는 동일할 수 있다. 그리고, 스쿨존, 실버존, 이면도로 및 골목길의 가중치는 동일할 수 있다.The highways, general roads, special roads, wide area roads, local roads, roads, islands, and roads may have the same weight. And, the weights of the school zone, the silver zone, the back road, and the alleyways may be the same.
이때 고속 도로, 일반 국도, 특별 시도, 광역 시도, 지방도, 시도, 군도, 구도의 가중치보다 스쿨존, 실버존, 이면도로 및 골목길의 가중치가 더 높을 수 있다.At this time, the weight of the school zone, the silver zone, the back road, and the alleyway may be higher than the weight of the highway, the general road, the special road, the wide area road, the local road, the road, the island road, and the road.
즉 이면도로나 골목길, 또한 스쿨존이나 실버 존의 경우, 조심해야 할 대상들이 많기 때문에, 제어부(140)는 이면도로나 골목길, 스쿨존이나 실버 존에서 충돌 위험에 대한 가중치를 높인다. That is, in the case of a back road or an alleyway, and also a school zone or a silver zone, since there are many objects to be careful of, the
제어부(140)는 탐색된 경로 정보에 기초하여 충돌 위험이 존재하는 장애물의 타입을 설정하는 것도 가능하고 설정된 장애물의 타입에 기초하여 충돌 위험도를 판단하는 것도 가능하며, 장애물의 타입에 대한 안내 정보를 출력하도록 하는 것도 가능하다. The
예를 들어, 제어부(140)는 5분 후 진입할 도로는 주택가 골목길로 보행자와의 충돌을 조심해야 한다는 안내 정보를 출력하도록 사운드 출력부의 동작을 제어할 수 있다. For example, the
제어부(140)는 속도 검출부(124)에서 검출된 검출 정보에 기초하여 자 차량의 주행속도를 획득한다.The
제어부(140)는 거리 검출부에서 검출된 검출 정보에 기초하여 장애물과의 거리를 획득하며 획득된 자 차량의 주행 속도와 장애물과의 거리에 기초하여 장애물과의 상대 거리 및 상대 속도를 획득하고, 획득된 장애물과의 상대 거리 및 상대 속도에 기초하여 자 차량과 장애물과의 충돌 예상 시간(Time To Collision, TTC)을 획득할 수 있다.The
제어부(140)는 장애물과의 상대 거리, 상대 속도, 충돌 예상 시간 중 적어도 하나에 기초하여 충돌 위험이 존재하는지를 판단할 수 있다.The
예를 들어, 제어부(140)는 장애물과의 상대 거리가 기준 상대 거리 이하이면 충돌 위험이 존재한다고 판단할 수 있고, 장애물의 상대 속도가 기준 상대 속도 이상이면 충돌 위험이 존재한다고 판단할 수 있으며, 충돌 예상 시간이 기준 시간 이하이면 충돌 위험이 존재한다고 판단할 수 있다.For example, the
아울러 제어부(140)는 장애물과의 상대 거리, 상대 속도, 충돌 예상 시간 중 적어도 하나에 기초하여 충돌 위험도를 획득할 수 있다.In addition, the
즉 차량에는 장애물과의 상대 거리에 대응하는 충돌 위험도가 저장되어 있을 수 있고, 장애물과의 상대 속도에 대응하는 충돌 위험도가 저장되어 있을 수 있으며, 충돌 예상 시간에 대응하는 위험 위험도가 저장되어 있을 수 있다.That is, the vehicle may store a collision risk corresponding to a relative distance from an obstacle, a collision risk corresponding to a relative speed with an obstacle may be stored, and a danger risk corresponding to an estimated collision time may be stored. have.
아울러 제어부(140)는 장애물과의 상대 거리, 상대 속도, 충돌 예상 시간 중 적어도 하나에 기초하여 충돌 위험도를 확인하고 도로의 종류에 대응하는 가중치를 확인한 후, 확인된 가중치에 기초하여 확인된 충돌 위험도를 조절하는 것도 가능하다.In addition, the
예를 들어, 제어부(140)는 도로의 종류가 이면도로나 골목길이면 확인된 충돌 위험도를 일정 크기만큼 상승시키고, 도로의 종류가 고속 도로이면 확인된 충돌 위험도를 일정 크기만큼 감소시킬 수 있다. For example, if the type of road is a back road or an alleyway, the
제어부(140)는 제2영상 획득부(131)에 의해 획득된 영상 정보에 기초하여 운전자의 얼굴을 인식하고 인식된 얼굴에서 운전자의 시선을 인식하며 인식된 시선을 실시간으로 추적할 수 있다. The
제어부(140)는 운전자의 시선에 기초하여 운전자가 바라보는 방향을 인식할 수 있고, 제1영상 획득부(121)에서 획득된 도로의 영상 정보에 기초하여 운전자가 바라보는 대상물을 인식하는 것도 가능하다.The
또한 제어부(140)는 운전자의 시선에 기초하여 운전자의 집중도를 예측할 수 있다. 여기서 집중도는 운전자의 집중 여부에 대응하는 집중 상태를 의미한다. 아울러 집중 상태는 전방 주시 상태를 포함할 수 있다.In addition, the
즉 제어부(140)는 운전자가 전방을 주시하고 있다고 판단되면 집중 상태 1을 플래그로 송출하고, 운전자가 우측을 주시하고 있다고 판단되면 집중 상태 0을 플래그로 송출할 수 있다.That is, if it is determined that the driver is staring ahead, the
제어부(140)는 제1가압 검출부(132)에 의해 검출된 압력 정보와 제2가압 검출부(133)에 의해 검출된 압력 정보에 기초하여 운전자의 페달 조작 의도를 판단할 수 있다.The
제어부(140)는 제1가압 검출부(132)에 의해 검출된 압력 정보로부터, 브레이크 페달(112)의 가압 속도, 브레이크 페달에 인가된 압력의 크기 및 브레이크 페달의 가압 위치를 획득할 수 있고 브레이크 페달의 가압 속도의 변화로부터 브레이크 페달(112)의 가압 가속도를 획득할 수 있다.The
여기서 제1가압 검출부(132)에 의해 검출된 압력 정보는 운전자에 의해 조작된 제동 정보일 수 있다.Here, the pressure information detected by the first
제어부(140)는 시간 변화에 대응하는 브레이크 페달에 인가된 압력의 크기 변화로부터 브레이크 페달(112)의 가압 속도를 획득할 수 있고, 브레이크 페달에 인가된 압력의 크기에 기초하여 브레이크 페달의 가압 위치를 획득할 수 있다.The
아울러 차량은 브레이크 페달에 인접하게 배치된 제1위치 검출부(미도시)를 더 포함하고, 제어부(140)는 제1위치 검출부(미도시)에서 검출된 검출 정보에 기초하여 브레이크 페달의 가압 위치를 획득하는 것도 가능하다.In addition, the vehicle further includes a first position detection unit (not shown) disposed adjacent to the brake pedal, and the
제어부(140)는 브레이크 페달의 가압속도, 압력의 크기, 가압 위치 및 가압 가속도 중 적어도 하나에 기초하여 운전자의 페달 조작 의도를 인식할 수 있다. The
제어부(140)는 제2가압 검출부(133)에 의해 검출된 압력 정보로부터, 액셀러레이터 페달을 가압 속도, 액셀러레이터 페달의 가압 가속도 및 액셀러레이터 페달의 가압 위치를 획득할 수 있고 액셀러레이터 페달의 위치 변화량을 인식할 수 있다.The
여기서 제2가압 검출부(133)에 의해 검출된 압력 정보는 운전자에 의해 조작된 가속 정보일 수 있다.Here, the pressure information detected by the second
제어부(140)는 시간 변화에 대응하는 액셀러레이터 페달에 인가된 압력의 크기 변화에 기초하여 액셀러레이터 페달의 가압 속도를 획득할 수 있고, 액셀러레이터 페달에 인가된 압력의 크기에 기초하여 액셀러레이터 페달의 가압 위치를 획득할 수 있다.The
제어부(140)는 시간 변화에 대응하는 가압 위치의 변화에 기초하여 액셀러레이터 페달의 위치 변화량을 획득할 수 있다.The
아울러 차량은 액셀러레이터 페달(113)에 인접하게 배치된 제2 위치 검출부(미도시)를 더 포함하고, 제어부(140)는 제2위치 검출부(미도시)에서 검출된 검출 정보에 기초하여 액셀러레이터 페달의 가압 위치를 획득하는 것도 가능하다.In addition, the vehicle further includes a second position detection unit (not shown) disposed adjacent to the
제어부(140)는 액셀러레이터 페달(113)의 가압 속도, 액셀러레이터 페달의 가압 가속도, 액셀러레이터 페달의 가압 위치 및 액셀러레이터 페달의 위치 변화량 중 적어도 하나에 기초하여 운전자의 페달 조작 의도를 인식할 수 있다.The
제어부(140)는 조향각 검출부(134)에서 검출된 검출 정보에 기초하여 스티어링 휠(111)의 조향각을 획득한다. 이때 제어부(140)는 획득된 조향각에 기초하여 조향 가속도를 획득하는 것도 가능하다.The
제어부(140)는 조향각 검출부(134)에서 검출된 검출 정보에 기초하여 스티어링 휠(111)의 조향 각속도를 획득하는 것도 가능하다. 이때 제어부(140)는 획득된 조향 각속도에 기초하여 조향각을 획득하는 것도 가능하다.The
제어부(140)는 토크 검출부(미도시)에서 검출된 검출 정보에 기초하여 조향 토크를 획득하는 것도 가능하다. The
제어부(140)는 스티어링 휠(111)의 조향각, 조향 각속도 및 조향 토크 중 적어도 하나에 기초하여 운전자의 조향 의도(즉 회피 의도)를 인식할 수 있다.The
제어부(140)는 도로의 종류에 대응하는 가중치에 기초하여 획득된 충돌 위험도를 조절한다. 즉 제어부(140)는 도로의 종류가 이면도로나 골목길이면 가중치 상승에 따라 충돌 위험도를 높임으로써 적극적인 제어가 유도되도록 할 수 있다.The
제어부(140)는 제1영상 획득부에서 획득된 영상 내에서 장애물을 인식하고, 인식된 장애물의 위치를 확인하며 확인된 장애물의 위치와 거리 검출부에서 검출된 검출 정보에 대응하는 장애물의 위치에 기초하여 복수 개의 장애물 중 충돌 위험이 있는 장애물들에 대한 오버랩 및 오프셋을 판단할 수 있다.The
제어부(140)는 충돌 예상 시간과 미리 설정된 기준 시간에 기초하여 충돌 위험성이 존재하는지, 존재하지 않는지에 대한 충돌 위험의 존부를 판단할 수 있다. The
제어부(140)는 조향각 검출부(134)에서 검출된 검출 정보로부터 스티어링 휠(111)의 조향 속도, 조향 방향 및 조향각 중 적어도 하나를 인식한다. 여기서 검출 정보는 조향각 정보일 수 있다.The
아울러 제어부(140)는 조향각 정보로부터 스티어링 휠의 조향 각속도를 더 인식할 수 있고 조향 토크를 인식할 수 있다.In addition, the
제어부(140)는 스티어링 휠의 조향 속도, 조향 방향, 조향각, 조향 각속도 및 조향 토크 중 적어도 하나에 기초하여 운전자의 조향 의도를 판단할 수 있다.The
제어부(140)는 장애물의 위치 정보와 조향각 정보에 기초하여 운전자의 회피 의도를 판단할 수 있다.The
제어부(140)는 장애물 위치에 기초하여 경고 출력을 제어한다.The
제어부(140)는 장애물과의 충돌 위험이 존재한다고 판단되면 경고 출력을 제어한다.If it is determined that a danger of collision with an obstacle exists, the
제어부(140)는 장애물과의 충돌 위험이 존재하는 상태에서 회피 의도가 없다고 판단되면 경고 출력을 제어하고, 회피 의도가 있다고 판단되면 경고 출력을 정지 제어한다.The
제어부(140)는 장애물의 위치 정보에 기초하여 제동 동작이 필요한 상황인지, 가속 동작이 필요한 상황인지를 판단한다. 즉 제어부(140)는 장애물의 위치 정보에 기초하여 필요 동작을 판단할 수 있다.The
제어부(140)는 판단된 필요 동작과, 제1가압 검출부(132)에 의해 검출된 압력 정보 및 제2가압 검출부(133)에 의해 검출된 압력 정보에 기초하여 충돌 위험에 대한 적절한 대응을 수행하였는지 판단할 수 있다.The
제어부(140)는 필요 동작이 제동 동작일 때 제동 정보가 수신되면 적절한 대응이라고 판단하고, 필요 동작이 가속 동작일 때 가속 정보가 수신되면 적절한 대응이라고 판단한다.When the required operation is the braking operation, the
제어부(140)는 장애물의 위치 정보에 대응하는 조향 정보가 수신되면 회피 의도가 있다고 판단할 수 있다.When the steering information corresponding to the position information of the obstacle is received, the
제어부(140)는 필요 동작이 제동 동작일 때 가속 정보가 수신되면 액셀러레이터 페달의 가속 제한을 제어하고, 액셀러레이터 페달의 동작 모드를 전환하며 경고 출력을 제어한다.The
예를 들어 제어부(140)는 액셀러레이터 페달의 가속 제한을 제어할 때, 스로틀을 30%로 제한할 수 있다.For example, when controlling the acceleration limit of the accelerator pedal, the
제어부(140)는 액셀러레이터 페달의 동작 모드를 전환할 때, 제동력이 발생되도록 제동 장치를 제어할 수 있다.When switching the operation mode of the accelerator pedal, the
제어부(140)는 필요 동작이 제동 동작일 때 동작 모드를 전환한 상태에서 제동 정보가 수신되면 액셀러레이터 페달의 동작 모드를 복귀 제어하고 경고 출력을 정지 제어하며, 또한 액셀러레이터 페달의 가속 제한을 해제 제어한다.When the braking information is received in a state in which the operation mode is switched when the required operation is the braking operation, the
제어부(140)는 액셀러레이터 페달의 동작 모드를 복귀 제어할 때, 가속력이 발생되도록 동력 장치(170)를 제어할 수 있다.The
제어부(140)는 필요 동작이 가속 동작일 때 제동 정보가 수신되면 브레이크 페달의 제동 제한을 제어하고 경고 출력을 제어하며, 가속 정보의 수신 여부를 판단하고 가속 정보가 수신되었다고 판단되면 제동 제한을 해제 제어하며 또한 경고 출력을 정지 제어한다.When the braking information is received when the required operation is an acceleration operation, the
제어부(140)는 브레이크 페달의 제동 제한을 제어할 때, 제동 장치에서 발생되는 제동력을 30%로 제한할 수 있다.When controlling the braking limit of the brake pedal, the
제어부(140)는 경고 출력을 제어할 때, 멜로디, 부저, 안내 음성 중 적어도 하나가 출력되도록 사운드 출력부의 동작을 제어할 수 있다.When controlling the warning output, the
제어부(140)는 경고 출력을 제어할 때, 표시부 및 차량용 단말기의 색상이 변경되거나 점멸되도록 제어할 수 있다.When controlling the warning output, the
제어부(140)는 경고 출력을 제어할 때 장애물과의 거리에 기초하여 경고음의 크기를 제어할 수 있다.When controlling the warning output, the
제어부(140)는 램프(미도시)나 경고 장치를 제어하여 다른 차량의 운전자 또는 보행자에게 주의 경고를 하는 것도 가능하다.The
아울러 제어부(140)는 제1, 2 가압 검출부에 의해 검출된 검출 정보에 기초하여 운전자의 페달 조작 의도가 존재하는지 판단하고 운전자의 페달 조작 의도가 있다고 판단되면 장애물의 위치 정보에 기초하여 제동 동작이 필요한 상황인지, 가속 동작이 필요한 상황인지를 판단하며, 운전자에 의해 조작된 페달의 기능과 필요 동작이 일치하는지를 판단하여 적절한 대응이 수행되었는지 판단하는 것도 가능하다.In addition, the
제어부(140)는 클러스터나 사이드 미러에 마련된 경고등을 점등 제어하여 운전자에게 1차 위험을 알리고, 경고등을 점등시켜 시각적 경고를 수행함과 동시에 시트 벨트(미도시)의 진동을 제어하여 운전자에게 2차 위험을 알리는 것도 가능하다.The
도 3에 도시된 바와 같이, 제어부(140)는 제1영상 획득부(121)에서 획득된 영상 정보, 거리 검출부(122)에서 검출된 검출 정보, 위치 수신부(123)에 수신된 위치 정보 및 속도 검출부(124)에서 검출된 검출 정보에 기초하여 장애물을 인식하고 인식된 장애물과의 충돌을 인식하는 충돌 인식부(141)와, 제2영상 획득부(131)에서 획득된 영상 정보, 제1가압 검출부(132), 제2가압 검출부(133), 속도 검출부(124) 및 조향각 검출부(134)에서 검출된 각각의 검출 정보에 기초하여 운전자의 의도를 인식하는 운전자 의도 인식부(142)를 포함할 수 있다.As shown in FIG. 3, the
또한 제어부(140)는 충돌 인식부(141)에서 인식된 장애물과의 충돌 인식 정보와 운전자 의도 인식부(142)에서 인식된 운전자 의도 정보에 기초하여 가속 동작이 필요한지를 판단하는 가속 필요 판단부(143)와, 제동 동작이 필요한지를 판단하는 제동 필요 판단부(144)와, 액셀러레이터 페달의 동작 모드의 전환과 복귀가 필요한지를 판단하는 동작 모드 전환 판단부(145)를 포함할 수 있다.In addition, the
이러한 충돌 인식부(141)와, 운전자 의도 인식부(142)와, 가속 필요 판단부(143)와, 제동 필요 판단부(144)와, 동작 모드 전환 판단부(145)는 별개의 프로세서로 마련될 수 있다. 이때 충돌 인식부(141)와, 운전자 의도 인식부(142)와, 가속 필요 판단부(143)와, 제동 필요 판단부(144)와, 동작 모드 전환 판단부(145)는 통신을 통해 상호 정보를 송수신할 수 있다.The
아울러 도 2에 도시된 바와 같이, 충돌 인식부(141)와, 운전자 의도 인식부(142)와, 가속 필요 판단부(143)와, 제동 필요 판단부(144)와, 동작 모드 전환 판단부(145)는 하나의 프로세서로 마련되는 것도 가능하다.In addition, as shown in FIG. 2, the
이러한 제어부(140)는 차량 내 구성부들의 동작을 제어하기 위한 알고리즘 또는 알고리즘을 재현한 프로그램에 대한 데이터를 저장하는 메모리(미도시), 및 메모리에 저장된 데이터를 이용하여 전술한 동작을 수행하는 프로세서(미도시)로 구현될 수 있다. 이때, 메모리와 프로세서는 각각 별개의 칩으로 구현될 수 있다. 또는, 메모리와 프로세서는 단일 칩으로 구현될 수도 있다.The
제어부(140)는 차량의 주행을 제어하는 전자 제어 유닛(ECU)일 수 있고, 마이컴, CPU, 프로세서 중 어느 하나일 수 있다.The
저장부(140a)는 운전자의 페달 조작 의도를 판단하기 위한 제1기준 가압 속도, 제1기준 압력 크기, 제1기준 위치 변화량, 제1기준 가압 가속도, 제2기준 가압 속도, 제2기준 위치 변화량, 제2기준 가압 가속도를 저장한다.The
저장부(140a)는 운전자의 페달 조작 의도를 판단하기 위한 제1 내지 제7 일정 시간을 저장할 수 있다. 여기서 제1 내지 제7 일정 시간은 서로 동일할 수도 있고, 서로 상이할 수도 있다. 아울러 제1 내지 제7 일정 시간은 일부만이 동일할 수도 있고 일부만이 상이할 수도 있다.The
저장부(140a)는 충돌 위험 여부를 결정하기 위한 기준 상대 거리, 기준 상대 속도, 기준 시간을 더 저장할 수 있다.The
저장부(140a)는 상대 거리에 대응하는 충돌 위험도, 상대 속도에 대응하는 충돌 위험도, 충돌 예상 시간에 대응하는 충돌 위험도를 더 저장할 수 있다.The
저장부(140a)는 도로의 종류에 대응하는 가중치를 더 저장할 수 있다.The
저장부(140a)는 가중치별 기준 상대 거리, 기준 상대 속도, 기준 시간을 더 저장할 수 있다.The
저장부(140a)는 장애물의 타입 정보 및 장애물과의 거리 정보에 대응하는 경고음의 종류와, 장애물과의 거리 정보에 대응하는 경고음의 크기 정보를 저장하는 것도 가능하다.The
저장부(140a)는 장애물의 타입별 기준 상대 거리, 기준 상대 속도, 기준 시간을 더 저장할 수 있다.The
저장부(140a)는 S램(S-RAM), D랩(D-RAM) 등의 휘발성 메모리뿐만 아니라 플래시 메모리, 롬(Read Only Memory), 이피롬(Erasable Programmable Read Only Memory: EPROM), 이이피롬(Electrically Erasable Programmable Read Only Memory: EEPROM) 등의 비휘발성 메모리를 포함할 수 있다.The
저장부(140a)는 제어부(140)와 일체로 마련되는 것도 가능하다.The
차량의 저장부(140a)는 제어부(140)와 관련된 프로세서와 별개의 칩으로 구현된 메모리일 수 있고, 프로세서와 단일 칩으로 구현될 수도 있다. The
차량의 저장부(140a)는 캐쉬, ROM(Read Only Memory), PROM(Programmable ROM), EPROM(Erasable Programmable ROM), EEPROM(Electrically Erasable Programmable ROM) 및 플래쉬 메모리(Flash memory)와 같은 비휘발성 메모리 소자 또는 RAM(Random Access Memory)과 같은 휘발성 메모리 소자 또는 하드디스크 드라이브(HDD, Hard Disk Drive), CD-ROM과 같은 저장 매체 중 적어도 하나로 구현될 수 있으나 이에 한정되지는 않는다. Non-volatile memory devices such as cache, read only memory (ROM), programmable ROM (PROM), erasable programmable ROM (EPROM), electrically erasable programmable ROM (EPMROM), and flash memory Or it may be implemented as at least one of a volatile memory device such as random access memory (RAM) or a storage medium such as a hard disk drive (HDD) or CD-ROM, but is not limited thereto.
제동 장치(150)는 제어부(140)의 명령에 기초하여 복수의 차륜에 제동력이 각각 발생되도록 한다.The
제동 장치(150)는 마스터 실린더, 휠 실린더 및 브레이크 슈나 패드를 포함할 수 있다.The
제동 장치(150)는 마스터 실린더에서 발생된 유압을 각 휠 실린더에 일정하게 전달하고, 휠 실린더를 이용하여 브레이크 슈나 패드로 유압을 전달하여 드럼이나 디스크에 압착시킴으로써 브레이크 슈나 패드의 내부 또는 외부를 마찰시켜 제동력을 발생시킨다.The
제동 장치(150)는 작동 대기(Pre fill) 기능 및 가변 제동력 보조(Brake assist system: BAS) 기능을 수행할 수 있다.The
조향 장치(160)는 조향 장치는 핸들(스티어링)의 조향력을 경감하여 조향 상태의 안정성을 보장하기 위한 수단으로서 동력을 보조하기 위한 장치이다.The
이러한 조향 장치는 유압을 이용하여 조향력을 발생시키는 유압식과, 모터의 회전력을 이용하여 운전자의 조향을 용이하게 하는 전동식이 있다.The steering device includes a hydraulic type that generates a steering force using hydraulic pressure, and an electric type that facilitates steering of a driver using a rotational force of a motor.
전동식 조향 장치는, 운전자의 핸들의 회전력을 하측으로 전달할 수 있도록 핸들과 기어박스의 사이의 조향 컬럼에 배치된 모터를 이용하여 조향 컬럼 내부의 조향축을 회전시키는 컬럼 구동 방식의 C-MDPS와, 타이로드와 연결된 부분(랙 기어)에 배치된 모터를 이용하여 유압식 조향 장치와 동일하게 동작하도록 하는 랙 구동 방식의 R-MDPS 등으로 구분될 수 있다. The electric steering device is a column-driven C-MDPS that rotates the steering shaft inside the steering column by using a motor disposed in the steering column between the steering wheel and the gearbox to transmit the rotational force of the steering wheel to the driver, and a tie. It may be divided into a rack-driven R-MDPS or the like that operates in the same manner as a hydraulic steering device using a motor disposed in a portion connected to a rod (rack gear).
동력 장치(170)는 차륜의 동력을 공급하는 장치로, 주행에 필요한 구동력을 발생시키고 발생된 구동력을 조절하는 동력 발생 장치와, 발생된 동력을 전달받아 차륜에 전달하는 동력전달장치를 포함할 수 있다.The
예를 들어 동력 장치(170)는 엔진일 수 있고, 또는 모터일 수 있으며, 엔진과 모터를 모두 포함하는 것도 가능하다.For example, the
차량은 차량용 단말기(114), 입력부(115), 표시부(116) 및 사운드 출력부(170)를 더 포함할 수 있다.The vehicle may further include a
이러한 차량용 단말기(114), 표시부(116) 및 사운드 출력부(170)는 장애물과의 충돌 위험을 경고하기 위한 경고 장치로 이용될 수 있다.The
그리고 입력부(115)는 장애물과의 충돌 위험을 경고하기 위한 경고 정보를 설정하기 위한 입력 장치로 이용될 수 있다.In addition, the
이러한 차량용 단말기(114), 입력부(115), 표시부(116) 및 사운드 출력부(170)는 도 1의 설명 시에 설명된 바, 차량용 단말기(114), 입력부(115), 표시부(116) 및 사운드 출력부(170)에 대한 설명은 생략하도록 한다.The
아울러 경고 장치는 사이드 미러에 마련된 경고등, 클러스터에 마련된 경고등, 차체의 내장에 마련된 경고등 중 적어도 하나를 포함할 수 있다. In addition, the warning device may include at least one of a warning light provided on the side mirror, a warning light provided on the cluster, and a warning light provided on the interior of the vehicle body.
경고 장치는 시트 벨트에 마련된 진동 장치(미도시)를 더 포함할 수도 있고, 운전석(즉, 시트)에 마련된 진동 장치(미도시)를 더 포함할 수도 있다.The warning device may further include a vibration device (not shown) provided in the seat belt, or may further include a vibration device (not shown) provided in the driver's seat (ie, seat).
도 4a 및 4b는 실시 예에 따른 차량의 제어 순서도로, 도 5를 참조하여 설명한다. 여기서 도 5는 실시 예에 따른 차량의 제어 순서를 설명하는 각 구성부의 동작 타이밍 예시도이다.4A and 4B are control flowcharts of a vehicle according to an embodiment, which will be described with reference to FIG. 5. Here, FIG. 5 is an example of an operation timing of each component describing a control sequence of a vehicle according to an embodiment.
차량(100)은 시동이 온되고 차량용 단말기의 내비게이션 모드가 선택되면 현재 위치를 확인하고, 차량용 단말기를 통해 현재 위치가 매치된 지도를 표시하도록 한다.When the
이러한 차량(100)은 주행 중 현재 위치를 실시간으로 확인하면서 현재 위치가 매치된 지도를 표시하도록 한다.The
차량(100)은 목적지 정보가 입력되면 현재 위치 정보와 목적지 정보를 확인하고 확인된 목적지의 정보와 현재 위치 정보에 기초하여 현재 위치에서 목적지까지 경로 정보를 탐색하고 탐색된 경로 정보와 지도 정보에 기초하여 지도에 경로가 매칭된 내비게이션 정보를 차량용 단말기를 통해 표시하도록 한다. 이때에도 차량용 단말기는 지도에 현재 위치를 매치시켜 표시하도록 한다.When the destination information is input, the
차량(100)은 주행 중 제1영상 획득부(121)에서 획득된 영상 정보, 거리 검출부(122)에서 검출된 검출 정보, 위치 수신부(123)에 수신된 위치 정보 및 속도 검출부(124)에서 검출된 검출 정보에 기초하여 주행 상황 정보를 획득(201)한다.The
좀 더 구체적으로, 차량은 제1영상 획득부(121)에서 검출된 영상 신호를 수신하고 수신된 영상 신호의 신호 처리를 수행하되 신호 처리의 속도를 향상시키기 위하여 사이즈와 포맷을 변경하고, 화질 개선 작업을 수행할 수 있다.More specifically, the vehicle receives the image signal detected by the first
이와 같이 차량은 영상 신호에 대하여 클리어링 처리 및 노이즈 제거 처리를 수행하여 영상 정보를 생성하고 생성된 영상 정보에서 물체를 분해하는 비전기술들을 적용하여 영상 정보로부터 장애물을 인식한다.As described above, the vehicle recognizes an obstacle from the image information by applying vision technologies that generate image information by performing a clearing process and a noise removal process on the image signal and decompose an object from the generated image information.
그리고 차량은 인식된 장애물의 크기와 위치 정보를 획득하고 획득된 장애물의 위치 정보 및 크기 정보에 기초하여 장애물이 자전거, 보행자, 표지판, 신호등, 벽, 가드레일, 가로수, 가로등 및 타 차량 등과 같은 장애물의 타입을 획득하는 것도 가능하다. In addition, the vehicle acquires the size and location information of the recognized obstacle, and obstacles such as bicycles, pedestrians, signs, traffic lights, walls, guardrails, street trees, street lights, and other vehicles based on the acquired location and size information of the obstacles. It is also possible to acquire the type of.
차량은 차선을 인식하고 인식된 차선에 기초하여 자 차량이 주행하는 자 차로를 인식하며, 인식된 차로를 기준으로 자 차량의 전방, 좌우, 후방의 장애물의 위치 정보를 획득하는 것도 가능하다.The vehicle recognizes the lane and recognizes the own lane on which the own vehicle travels based on the recognized lane, and it is also possible to obtain the position information of obstacles in front, left, and rear of the own vehicle based on the recognized lane.
차량(100)은 거리 검출부(122)에서 검출된 검출 정보에 기초하여 자 차량의 주변, 즉 전방 및 좌우 측방을 스캔하여 장애물을 검출한다. 아울러 차량은 후방을 스캔하여 장애물을 검출하는 것도 가능하다. The
이러한 차량(100)은 거리 검출부(122)에서 의해 검출된 신호를 점 데이터로 군집화하여 장애물의 형상 정보 및 위치 정보를 획득한다. 여기서 점 데이터의 군집화는 자 차량과 장애물 간의 방향, 거리 및 점의 양에 기초하여 서로 이웃한 점들을 연결하는 것을 포함한다.The
이와 같이 차량(100)은 점 데이터를 군집화함으로써 주변에 위치한 장애물에 대한 정보를 획득할 수 있다. As described above, the
또한 차량은 장애물의 형상 정보에 기초하여 장애물의 타입을 획득하는 것도 가능하다.It is also possible for the vehicle to obtain the type of obstacle based on the shape information of the obstacle.
또한 차량은 장애물과의 충돌 위험 여부를 판단할 때, 현재 위치를 확인하고 확인된 현재 위치에서의 도로의 종류를 확인하며 확인된 도로의 종류에 대응하는 가중치를 확인하며 확인된 가중치에 기초하여 장애물과의 충돌 위험의 판단 기준이 조정되도록 한다.In addition, when determining whether there is a risk of collision with an obstacle, the vehicle checks the current location, checks the type of the road at the confirmed current location, checks the weight corresponding to the identified type of road, and blocks the obstacle based on the identified weight Criteria for determining the risk of collision with the team should be adjusted.
아울러 차량은 경로 정보 및 도로의 종류에 기초하여 충돌 예방을 위한 안내 정보를 출력하는 것도 가능하다. 예를 들어, 차량은 '5분 후 진입할 도로는 주택가 골목길로 보행자와의 충돌을 조심해야 한다'는 안내 정보를 출력할 수 있다. 여기서 안내 정보를 출력하는 것은 사운드 출력부를 통해 음성으로 출력하는 것을 포함할 수 있다.In addition, the vehicle may output guide information for collision prevention based on route information and a type of road. For example, the vehicle may output information indicating that 'the road to be entered after 5 minutes is a residential street alleyway and be careful of collision with pedestrians'. Here, outputting the guide information may include outputting the voice through the sound output unit.
차량은 장애물과 충돌 위험이 존재하는지 판단(202)한다.The vehicle determines whether there is an obstacle and a collision risk (202).
장애물과의 충돌 위험의 존재를 판단하는 구성을 좀 더 구체적으로 설명한다.The configuration for determining the existence of a collision risk with an obstacle will be described in more detail.
차량은 속도 검출부에서 검출된 검출 정보에 기초하여 자 차량의 주행 속도를 획득하고, 획득된 자 차량의 주행 속도와 장애물과의 거리에 기초하여 장애물과의 상대 거리 및 상대 속도 중 적어도 하나를 획득하고 획득된 상대 거리 및 상대 속도 중 적어도 하나에 기초하여 장애물과 충돌 위험이 존재하는지 판단한다.The vehicle acquires the traveling speed of the host vehicle based on the detection information detected by the speed detector, and acquires at least one of the relative distance and the relative speed of the obstacle based on the obtained traveling speed of the host vehicle and the distance to the obstacle, It is determined whether there is an obstacle and a collision risk based on at least one of the obtained relative distance and relative speed.
좀 더 구체적으로 차량은 장애물과의 상대 거리가 기준 상대 거리 이하이면 장애물과 충돌 위험이 존재한다고 판단한다.More specifically, the vehicle determines that there is a danger of collision with the obstacle if the relative distance to the obstacle is less than or equal to the reference relative distance.
또한 차량은 장애물의 상대 속도가 기준 상대 속도 이상이면 장애물과 충돌 위험이 존재한다고 판단한다.In addition, the vehicle determines that there is a danger of collision with the obstacle if the relative speed of the obstacle is greater than the reference relative speed.
차량은 장애물과의 상대 거리가 기준 상대 거리 이하인 조건과, 장애물의 상대 속도가 기준 상대 속도 이상인 조건 중 적어도 하나를 만족하면 장애물과 충돌 위험이 존재한다고 판단하는 것도 가능하다.If the vehicle satisfies at least one of a condition in which the relative distance to the obstacle is less than or equal to the reference relative speed, and a condition in which the relative speed of the obstacle is greater than or equal to the reference relative speed, it is possible to determine that there is a danger of collision with the obstacle.
또한 차량은 획득된 장애물과의 상대 거리 및 상대 속도에 기초하여 자 차량과 장애물과의 충돌 예상 시간(Time To Collision, TTC)을 획득하고, 획득된 충돌 예상 시간이 기준 시간 이하이면 장애물과 충돌 위험이 존재한다고 판단하는 것도 가능하다.In addition, the vehicle acquires a time to collision (TTC) between the host vehicle and the obstacle based on the relative distance and the relative speed of the acquired obstacle, and if the estimated collision time is less than the reference time, the danger of collision with the obstacle It is also possible to judge that this exists.
차량은 장애물과의 상대 거리가 기준 상대 거리 이하인 조건과, 장애물의 상대 속도가 기준 상대 속도 이상인 조건과, 획득된 충돌 예상 시간이 기준 시간 이하인 조건 중 적어도 하나를 만족하면 장애물과 충돌 위험이 존재한다고 판단하는 것도 가능하다.If the vehicle satisfies at least one of a condition in which the relative distance to the obstacle is less than or equal to the reference relative distance, a condition in which the relative speed of the obstacle is greater than or equal to the reference relative speed, and a condition in which the estimated collision time obtained is less than or equal to the reference time, an obstacle and a collision risk exist. It is also possible to judge.
다른 예로, 차량은 장애물과의 충돌 위험 여부를 판단할 때, 장애물과의 상대 거리에 대응하는 위험도, 장애물과의 상대 속도에 대응하는 위험도, 장애물과의 충돌 예상 시간에 대응하는 위험도 중 적어도 하나를 확인하고, 현재 위치를 확인하며 확인된 현재 위치에서의 도로의 종류를 확인하며 확인된 도로의 종류에 대응하는 가중치를 확인하며 확인된 가중치에 기초하여 장애물과의 충돌 위험도를 조정하고 조정된 충돌 위험도가 기준 위험도 이상이면 충돌 위험이 존재한다고 판단하는 것도 가능하다.As another example, when determining whether a vehicle is in danger of collision with an obstacle, the vehicle may include at least one of a danger corresponding to a relative distance from the obstacle, a danger corresponding to a relative speed with the obstacle, and a danger corresponding to an estimated time of collision with the obstacle. Check, check the current location, check the type of road at the current location identified, check the weight corresponding to the identified road type, adjust the collision risk with obstacles based on the identified weight, and adjust the collision risk It is also possible to judge that a collision risk exists if is above the reference risk.
아울러 차량은 장애물과의 충돌 위험도를 확인할 때, 장애물과의 상대 거리와 상대 속도의 상관 관계에 대응하는 위험도, 장애물과의 상대 속도와 충돌 예상 시간의 상관 관계에 대응하는 위험도, 장애물과의 충돌 예상 시간과 상대 거리의 상관 관계에 대응하는 위험도 중 적어도 하나를 확인하는 것도 가능하고, 장애물과의 상대 거리, 상대 속도 및 충돌 예상 속도의 상관 관계에 대응하는 위험도를 확인하는 것도 가능하다.In addition, when checking the risk of collision with an obstacle, the vehicle has a risk corresponding to the correlation between the relative distance and the speed of the obstacle, a risk corresponding to the correlation between the relative speed with the obstacle and the estimated time of collision, and a collision with the obstacle. It is also possible to check at least one of the risks corresponding to the correlation between the time and the relative distance, and it is also possible to check the risk corresponding to the correlation between the relative distance from the obstacle, the relative speed and the expected collision speed.
또 다른 예로, 차량은 장애물과의 충돌 위험 여부를 판단할 때, 도로의 종류에 대응하는 가중치를 확인하고 확인된 가중치에 대응하는 기준 상대 거리, 기준 상대 속도 및 기준 시간 중 적어도 하나를 확인하며 장애물과의 상대 거리가 기준 상대 거리 이하이면 장애물과 충돌 위험이 존재한다고 판단하고, 장애물의 상대 속도가 기준 상대 속도 이상이면 장애물과 충돌 위험이 존재한다고 판단하며, 획득된 충돌 예상 시간이 기준 시간 이하이면 장애물과 충돌 위험이 존재한다고 판단하는 것도 가능하다.As another example, when determining whether a vehicle is in danger of collision with an obstacle, the vehicle checks a weight corresponding to the type of road, and checks at least one of a reference relative distance, a reference relative speed, and a reference time corresponding to the identified weight, and the obstacle If the relative distance of the obstacle is below the reference relative distance, it is determined that there is a risk of collision with the obstacle, and if the relative speed of the obstacle is greater than the reference relative speed, it is determined that there is a risk of collision with the obstacle. It is also possible to judge that there are obstacles and dangers of collision.
예를 들어, 차량은 이면도로나 골목길이면 고속도로의 기준 상대 거리에 비해 일정거리만큼 감소된 기준 상대 거리에 기초하여 장애물과의 상대 거리가 더 가까울 때 충돌 위험이 존재한다고 판단하거나, 또는 고속도로의 기준 상대 속도에 비해 일정 속도만큼 증가된 기준 상대 속도에 기초하여 장애물과의 상대 속도가 더 빠를 때 충돌 위험이 존재한다고 판단하거나, 또는 고속도로의 기준 시간에 비해 일정 시간만큼 감소된 기준 시간에 기초하여 장애물과의 충돌 예상 시간이 더 짧을 때 충돌 위험이 존재한다고 판단하도록 할 수 있다.For example, if a vehicle is a back road or an alleyway, it is determined that there is a collision risk when the relative distance to the obstacle is closer based on the reference relative distance reduced by a certain distance compared to the reference relative distance of the highway, or the reference of the highway Based on the reference relative speed increased by a certain speed relative to the relative speed, it is determined that a collision risk exists when the relative speed with the obstacle is faster, or an obstacle based on the reference time reduced by a certain time compared to the reference time on the highway When the expected collision time with the is shorter, it is possible to determine that a collision risk exists.
다음 차량은 장애물과의 충돌 위험이 존재한다고 판단되면 제2영상 획득부(131)에서 획득된 영상 정보, 제1가압 검출부(132), 제2가압 검출부(133), 속도 검출부(124) 및 조향각 검출부(134)에서 검출된 각각의 검출 정보에 기초하여 운전자의 의도 정보를 획득(203)하고 획득된 운전자 의도 정보에 기초하여 충돌 위험이 존재하는 장애물에 대해 회피 의도가 존재하는지 판단(504)한다.If the next vehicle determines that there is a danger of collision with an obstacle, the image information obtained from the second
이때 차량은 장애물과의 충돌 위험이 존재하는 상태에서 회피 의도가 없다고 판단되면 경고를 출력하고, 회피 의도가 있다고 판단되면 경고 출력을 정지시킬 수 있다.At this time, the vehicle may output a warning when it is determined that there is no intention to avoid while there is a danger of collision with an obstacle, and stop output of the warning when it is determined that there is an intention to avoid.
운전자의 의도 정보를 획득하는 구성을 좀 더 구체적으로 설명한다.The configuration for obtaining the driver's intention information will be described in more detail.
차량은 회피해야 할 장애물의 위치를 확인하고 확인된 장애물의 위치에 대한 위치정보에 대응하는 기준 조향각, 기준 조향 각속도 및 기준 조향 토크 중 적어도 하나의 기준 조향 정보를 확인한다.The vehicle checks the position of the obstacle to be avoided and checks at least one reference steering information among a reference steering angle, a reference steering angular velocity, and a reference steering torque corresponding to the position information on the identified obstacle position.
여기서 장애물의 위치 정보에 대응하는 기준 조향각은 실험에 의해 획득되어 미리 저장된 값일 수 있고, 장애물의 위치 정보에 대응하는 기준 조향 각속도 역시 조향각은 실험에 의해 획득되어 미리 저장된 값일 수 있으며, 장애물의 위치 정보에 대응하는 기준 조향 토크 또한 실험에 의해 획득되어 미리 저장된 값일 수 있다.Here, the reference steering angle corresponding to the position information of the obstacle may be a value previously obtained by experiment, and the reference steering angular velocity corresponding to the position information of the obstacle may also be a value obtained by experiment and stored in advance, and the position information of the obstacle The reference steering torque corresponding to may also be a value obtained by experiment and stored in advance.
차량은 스티어링 휠의 조작 정보에 대응하는 조향각, 조향 각속도 및 조향 토크 중 적어도 하나를 확인하고, 확인된 조향 정보와 기준 조향 정보를 비교하여 회피 의도가 존재하는지 판단한다. The vehicle checks at least one of the steering angle, steering angular speed, and steering torque corresponding to the steering wheel operation information, and compares the identified steering information with the reference steering information to determine whether there is an intention to avoid.
여기서 스티어링 휠의 조작 정보는 스티어링 휠의 조작 시에 검출된 조향각일 수 있고, 스티어링 휠의 조작 시에 검출된 조향 각속도일 수 있으며, 스티어링 휠의 조작 시에 검출된 조향 토크일 수 있다.Here, the steering wheel operation information may be a steering angle detected when the steering wheel is operated, a steering angular speed detected when the steering wheel is operated, or a steering torque detected when the steering wheel is operated.
아울러 차량은 검출된 조향각으로부터 조향각 속도를 획득하는 것도 가능하고, 조향각 속도로부터 조향각을 획득하는 것도 가능하다. In addition, the vehicle can also obtain the steering angle speed from the detected steering angle, and it is also possible to obtain the steering angle from the steering angle speed.
좀 더 구체적으로, 차량은 스티어링 휠의 조작에 대응하는 획득된 조향각과 기준 조향각을 비교하고, 이때 획득된 조향각이 기준 조향각 이상이면 회피 의도가 존재한다고 판단한다.More specifically, the vehicle compares the obtained steering angle corresponding to the operation of the steering wheel with the reference steering angle, and if the obtained steering angle is greater than or equal to the reference steering angle, it is determined that there is an intention to avoid.
차량은 스티어링 휠의 조작에 대응하는 획득된 조향 각속도와 기준 조향 각속도를 비교하고, 이때 획득된 조향 각속도가 기준 조향 각속도 이상이면 회피 의도가 존재한다고 판단한다.The vehicle compares the obtained steering angular velocity corresponding to the operation of the steering wheel with the reference steering angular velocity, and if the obtained steering angular velocity is greater than or equal to the reference steering angular velocity, it is determined that there is an intention to avoid.
차량은 스티어링 휠의 조작에 대응하는 획득된 조향 토크와 기준 조향 토크를 비교하고, 이때 획득된 조향 토크가 기준 조향 토크 이상이면 회피 의도가 존재한다고 판단한다.The vehicle compares the obtained steering torque corresponding to the operation of the steering wheel with the reference steering torque, and if the obtained steering torque is greater than or equal to the reference steering torque, it is determined that there is an intention to avoid.
아울러 차량은 충돌 위험성이 존재하는 장애물이 인식되었을 때 스티어링 휠의 조작 신호의 수신 여부를 확인하고 스티어링 휠의 조작 신호가 수신되었다고 판단되면 운전자의 회피 의도가 존재한다고 판단하는 것도 가능하다.In addition, the vehicle may also determine whether there is an intention of avoiding the driver when it is determined that the steering wheel operation signal is received and when the steering wheel operation signal is received.
다음 차량은 회피 의도가 없다고 판단되면 운전자가 집중 상태인지를 판단(205)하며 운전자가 집중 상태가 아니라고 판단되면 경고를 출력(206)한다.If it is determined that there is no intention to evade, the next vehicle determines whether the driver is focused (205) and outputs a warning (206) if it is determined that the driver is not focused.
좀 더 구체적으로, 차량은 제2영상 획득부(131)에 의해 획득된 영상 정보에 기초하여 운전자의 얼굴을 인식하고 인식된 얼굴에서 운전자의 시선을 인식하며 인식된 시선을 실시간으로 추적할 수 있다. More specifically, the vehicle may recognize the driver's face based on the image information obtained by the second
차량은 운전자의 시선에 기초하여 운전자가 바라보는 방향을 인식할 수 있고, 제1영상 획득부(121)에서 획득된 도로의 영상 정보에 기초하여 운전자가 바라보는 대상물을 인식하는 것도 가능하다.The vehicle can recognize the direction the driver is looking based on the driver's gaze, and it is also possible to recognize the object viewed by the driver based on the image information of the road obtained from the first
차량은 운전자의 시선에 기초하여 운전자의 집중도를 예측할 수 있다. 여기서 집중도는 운전자의 집중 여부에 대응하는 집중 상태를 의미한다. 아울러 집중 상태는 전방 주시 상태를 포함할 수 있다.The vehicle can predict the concentration of the driver based on the driver's gaze. Here, the concentration degree means a concentration state corresponding to whether the driver concentrates. In addition, the focused state may include a forward gaze state.
따라서, 차량은 운전자가 전방을 주시하고 있다고 판단되면 집중 상태라고 판단하고, 전방이 아닌 다른 방향을 주시하고 있다고 판단되면 집중 상태가 아니라고 판단할 수 있다. 이때 차량은 표시 또는 차량용 단말기를 통해 '전방을 주시하세요'라는 메시지를 출력하거나, 사운드 출력부를 통해 '전방을 주시하세요'라는 음성을 출력할 수 있다.Accordingly, the vehicle may determine that the driver is in the focused state when it is determined that the driver is looking forward, and may determine that the driver is not focused when it is determined that the driver is looking in a different direction than the front. At this time, the vehicle may output a message 'Please keep an eye on the front' through a display or a vehicle terminal, or may output a voice 'Please keep an eye on the front' through a sound output unit.
차량은 운전자가 집중 상태이면 장애물의 위치 정보에 기초하여 운전자가 수행해야 할 필요 동작을 판단(207)하고, 운전자의 의도 정보에 기초하여 페달 조작 의도가 존재하는지 판단한다.If the driver is in a concentrated state, the vehicle determines a necessary operation to be performed by the driver based on the position information of the obstacle, and determines whether a pedal intention exists based on the driver's intention information.
예를 들어 차량은, 충돌 위험이 존재하는 장애물의 자 차량의 후방에 위치한다고 판단되면 필요 동작으로 가속이 필요하다고 판단할 수 있고 충돌 위험이 존재하는 장애물의 자 차량의 전방에 위치한다고 판단되면 필요 동작으로 제동이 필요하다고 판단할 수 있다.For example, if it is determined that the vehicle is located at the rear of the vehicle of the obstacle where the danger of collision exists, it may be determined that acceleration is required as a necessary action, and it is necessary when it is determined that the vehicle is located in front of the vehicle of the obstacle where the danger of collision exists. It can be determined that braking is necessary by the operation.
페달 조작 의도가 존재하는지 판단하는 것은, 액셀러레이터 페달(113)로부터 압력 정보가 수신되거나, 브레이크 페달(112)로부터 압력 정보가 수신되면 페달 조작 의도가 존재한다고 판단할 수 있다. 이러한 운전자의 페달 조작 의도에 대해 좀 더 구체적으로 설명한다.Determining whether there is an intention to operate the pedal may determine that there is an intention to operate the pedal when pressure information is received from the
차량은 제동 동작이 필요한 상황에서 액셀러레이터 페달(113)로부터 압력 정보가 수신되거나, 브레이크 페달(112)로부터 압력 정보가 수신되면 제동 의도가 존재한다고 판단할 수 있고, 가속 동작이 필요한 상황에서 액셀러레이터 페달(113)로부터 압력 정보가 수신되거나, 브레이크 페달(112)로부터 압력 정보가 수신되면 가속 의도가 존재한다고 판단할 수 있다.The vehicle may determine that a braking intention exists when pressure information is received from the
여기서 브레이크 페달의 압력 정보 및 액셀러레이터 페달의 압력 정보는 운전자에 의해 조작된 페달 의도 정보일 수 있다.Here, the pressure information of the brake pedal and the pressure information of the accelerator pedal may be pedal intention information operated by the driver.
좀 더 구체적으로, 차량은 브레이크 페달(112)로부터 압력 정보가 수신되면 페달 조작 의도가 존재한다고 판단할 수 있다.More specifically, when the pressure information is received from the
차량은 제1가압 검출부(132)에 의해 검출된 압력 정보가 수신되면 수신된 압력 정보에 대응하는 압력 크기를 획득하고 획득된 브레이크 페달의 압력 크기(bar)가 미리 설정된 제1기준 압력 크기 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.When the pressure information detected by the first
또한 차량은 브레이크 페달의 압력 크기(bar)가 미리 설정된 제1기준 압력 크기 이상으로 유지되는 시간이 제1일정 시간 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.In addition, the vehicle may determine that there is an intention to operate the pedal when the time at which the pressure of the brake pedal is maintained at a predetermined pressure level or higher is equal to or greater than the first predetermined time.
차량은 제1가압 검출부(132)에 의해 검출된 압력 정보가 수신되면 시간 변화에 따른 압력 변화를 확인하여 브레이크 페달(112)의 가압 속도를 획득하고 획득된 브레이크 페달의 가압 속도(mm/s)가 미리 설정된 제1기준 가압 속도 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.When the vehicle receives the pressure information detected by the first
또한 차량은 브레이크 페달의 가압 속도(mm/s)가 미리 설정된 제1기준 가압 속도 이상으로 유지되는 시간이 제2일정 시간 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.In addition, the vehicle may determine that there is an intention to operate the pedal if the time at which the pressurizing speed (mm / s) of the brake pedal is maintained above the preset first reference pressurizing speed is equal to or greater than the second predetermined time.
차량은 제1가압 검출부(132)에 의해 검출된 압력 정보가 수신되면 시간 변화에 따른 가압 속도의 변화를 확인하여 브레이크 페달의 가압 가속도를 획득하고, 획득된 브레이크 페달의 가압 속도(mm/s)가 미리 설정된 제1기준 가압 속도 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.When the vehicle receives the pressure information detected by the first
또한 차량은 브레이크 페달의 가압 속도(mm/s)가 미리 설정된 제1기준 가압 속도 이상으로 유지되는 시간이 제3일정 시간 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.In addition, the vehicle may determine that there is an intention to operate the pedal if the time at which the pressurizing speed (mm / s) of the brake pedal is maintained at a preset first reference pressure or higher is equal to or greater than a third predetermined time.
차량은 브레이크 페달에 인가된 압력의 크기에 기초하여 브레이크 페달의 가압 위치를 획득할 수 있다.The vehicle may acquire a pressurized position of the brake pedal based on the magnitude of the pressure applied to the brake pedal.
아울러 차량은 브레이크 페달에 인접하게 배치된 제1위치 검출부(미도시)를 더 포함하고, 제1위치 검출부(미도시)에서 검출된 검출 정보에 기초하여 브레이크 페달의 가압 위치를 획득하는 것도 가능하다.In addition, the vehicle may further include a first position detection unit (not shown) disposed adjacent to the brake pedal, and it is also possible to obtain a press position of the brake pedal based on the detection information detected by the first position detection unit (not shown). .
이때 차량은 브레이크 페달의 위치의 변화량(mm)이 미리 설정된 제1기준 위치 변화량 이상이면 페달의 조작 의도가 존재한다고 판단할 수 있다.At this time, the vehicle may determine that there is an intention to operate the pedal when the change amount (mm) of the position of the brake pedal is greater than or equal to the preset first reference position change amount.
또한 차량은 브레이크 페달의 위치의 변화량(mm)이 미리 설정된 제1기준 위치 변화량 이상으로 유지되는 시간이 제4일정 시간 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.In addition, the vehicle may determine that the intention to operate the pedal exists when the amount of time (mm) of the change in the position of the brake pedal is maintained above the preset first reference position change amount is greater than or equal to the fourth predetermined time.
이와 같이, 차량은 브레이크 페달의 가압속도, 압력의 크기, 가압 위치 및 가압 가속도 중 적어도 하나에 기초하여 운전자의 페달 조작 의도를 인식할 수 있다. As such, the vehicle may recognize the driver's intention to operate the pedal based on at least one of the pressurizing speed of the brake pedal, the magnitude of the pressure, the pressing position, and the pressing acceleration.
또한 차량은 액셀러레이터 페달(113)로부터 압력 정보가 수신되면 페달 조작 의도가 존재한다고 판단할 수 있다.Also, when pressure information is received from the
차량은 액셀러레이터 페달에 인가된 압력 정보가 수신되면 시간 변화에 대응하는 액셀러레이터 페달에 인가된 압력의 크기 변화에 기초하여 액셀러레이터 페달의 가압 속도를 획득할 수 있고, 획득된 액셀러레이터 페달(113)의 가압 속도(mm/s)가 미리 설정된 제2기준 가압 속도 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.When the vehicle receives pressure information applied to the accelerator pedal, the vehicle may acquire a pressurizing speed of the accelerator pedal based on a change in the magnitude of the pressure applied to the accelerator pedal corresponding to a time change, and the pressurizing speed of the obtained
차량은 액셀러레이터 페달(113)의 가압 속도(mm/s)가 미리 설정된 제2기준 가압 속도 이상으로 유지되는 시간이 제5일정 시간 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.The vehicle may determine that there is an intention to operate the pedal if the time at which the pressurization speed (mm / s) of the
차량은 시간 변화에 대응하는 가압 속도 변화에 기초하여 액셀러레이터 페달(113)의 가압 가속도를 획득하고 획득된 액셀러레이터 페달(113)의 가압 가속도(mm/s2)가 미리 설정된 제2기준 가압 가속도 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.The vehicle obtains the pressurizing acceleration of the
차량은 액셀러레이터 페달(113)의 가압 가속도(mm/s2)가 미리 설정된 제2기준 가압 가속도 이상으로 유지되는 시간이 제6일정 시간 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.The vehicle may determine that the intention to operate the pedal exists if the time at which the pressurizing acceleration (mm / s2) of the
차량은 액셀러레이터 페달에 인가된 압력의 크기에 기초하여 액셀러레이터 페달의 위치를 획득할 수 있다.The vehicle can acquire the position of the accelerator pedal based on the magnitude of the pressure applied to the accelerator pedal.
차량은 액셀러레이터 페달(113)에 인접하게 배치된 제2 위치 검출부(미도시)를 더 포함하고, 제어부(140)는 제2위치 검출부(미도시)에서 검출된 검출 정보에 기초하여 액셀러레이터 페달의 가압 위치를 획득하는 것도 가능하다.The vehicle further includes a second position detection unit (not shown) disposed adjacent to the
차량은 시간 변화에 대응하는 액셀러레이터 페달의 위치의 변화에 기초하여 액셀러레이터 페달의 위치 변화량을 획득할 수 있으며, 획득된 액셀러레이터 페달(113)의 위치의 변화량(mm)이 미리 설정된 제2기준 위치 변화량 이상이면 페달 조작 의도가 존재한다고 판단할 수 있다.The vehicle may acquire a position change amount of the accelerator pedal based on a change in the position of the accelerator pedal corresponding to a time change, and the obtained change amount (mm) of the position of the
차량은 액셀러레이터 페달(113)의 위치의 변화량(mm)이 미리 설정된 제2기준 위치 변화량 이상으로 유지되는 시간이 제7일정 시간 이상이면 페달의 조작 의도가 존재한다고 판단할 수 있다.The vehicle may determine that there is an intention to operate the pedal if the amount of time (mm) of the position change of the
이와 같이 차량은 액셀러레이터 페달을 가압 속도, 액셀러레이터 페달의 가압 가속도 및 액셀러레이터 페달의 위치 변화량 중 적어도 하나에 기초하여 페달 조작 의도를 판단할 수 있다.In this way, the vehicle can determine the intention to operate the pedal based on at least one of a pressurizing speed of the accelerator pedal, a pressing acceleration of the accelerator pedal, and a position change amount of the accelerator pedal.
즉 차량은 판단된 필요 동작이 제동 동작이라고 판단(208)되면 브레이크 페달이 조작되었는지 판단(209)하고 브레이크 페달이 조작되지 않았다고 판단되면 운전자에 의해 액셀러레이터 페달이 조작되었다고 판단하여 액셀러레이터 페달 조작에 의한 가속을 제한하고 경고를 출력(210)한다.That is, if the vehicle determines that the determined necessary operation is the braking operation (208), determines whether the brake pedal has been operated (209), and if it is determined that the brake pedal has not been operated, determines that the accelerator pedal has been operated by the driver and accelerates by accelerator operation. Limits and outputs a warning 210.
다시 말해, 운전자의 페달 조작 의도가 있었으나, 운전자에 의해 조작된 페달은 브레이크 페달이 아닌 운전자의 실수에 의한 액셀러레이터 페달이라고 판단할 수 있다. 이에 따라 차량은 액셀러레이터 페달에 의해 발생되는 차량의 구동력을 제한한다. In other words, although the driver intended to operate the pedal, it can be determined that the pedal operated by the driver is not a brake pedal, but an accelerator pedal due to a driver's mistake. Accordingly, the vehicle limits the driving force of the vehicle generated by the accelerator pedal.
즉 차량은 액셀러레이터 페달에 의해 가속될 수 있는 가속량을 미리 설정된 비율인 30%로 제한함으로써 차량의 가속을 제한할 수 있다. 여기서 가속량을 30%로 제한하는 것은 스로틀을 30%로 제한하는 것을 포함할 수 있다.That is, the vehicle can limit the acceleration of the vehicle by limiting the amount of acceleration that can be accelerated by the accelerator pedal to a preset ratio of 30%. Here, limiting the acceleration amount to 30% may include limiting the throttle to 30%.
아울러 차량은 차량의 최대 가속량을 제한하는 것도 가능하고, 액셀러레이터 페달에 인가된 압력별 가속량을 제한하는 것도 가능하다.In addition, the vehicle can limit the maximum acceleration amount of the vehicle, and it is also possible to limit the acceleration amount for each pressure applied to the accelerator pedal.
경고를 출력하는 것은, 액셀러레이터 페달에 인가된 압력이 설정 압력 이상이면 엔진의 회전속도(RPM)의 음량을 증가시켜 운전자가 액셀러레이터 페달을 조작하고 있음을 인지하도록 하는 것도 가능하다.It is also possible to output a warning to increase the volume of the engine rotational speed (RPM) when the pressure applied to the accelerator pedal is greater than the set pressure, so that the driver is aware that the accelerator pedal is being operated.
경고를 출력하는 것은, 사운드 출력부를 통해 '액셀러레이터 페달을 밟고 있습니다. 액셀러레이터 페달에서 발을 떼세요'라는 음성을 출력하는 것도 가능하다.To output a warning, press the accelerator pedal through the sound output section. It is also possible to output a voice saying 'Please take your foot off the accelerator pedal'.
경고를 출력하는 것은, 표시부 및 차량용 단말기 중 적어도 하나를 이용하여'액셀러레이터 페달을 밟고 있습니다. 액셀러레이터 페달에서 발을 떼세요'라는 메시지를 출력하는 것도 가능하다.To output a warning, use at least one of the display unit and the vehicle terminal, and press the accelerator pedal. It is also possible to print the message 'Please take your foot off the accelerator pedal'.
경고를 출력하는 것은, 운전석의 시트나, 시트 벨트를 통해 진동을 출력하는 것을 포함할 수 있다.Outputting the warning may include outputting a vibration through the seat of the driver's seat or a seat belt.
그리고 차량은 액셀러레이터 페달의 동작 모드를 전환(211)한다. 즉 차량은 액셀러레이터 페달의 조작에 의한 동작을 제동을 수행하는 동작으로 전환할 수 있다.Then, the vehicle switches 211 the operation mode of the accelerator pedal. That is, the vehicle can convert the operation by the operation of the accelerator pedal to the operation for performing braking.
여기서 액셀러레이터 페달의 동작 모드를 전환하는 것은, 액셀러레이터 페달의 조작에 대한 제어권을 차량에게 천이하는 것을 포함할 수 있고, 이를 운전자에게 알리는 것을 포함할 수 있다.Here, switching the operation mode of the accelerator pedal may include shifting control of the accelerator pedal to the vehicle, and may include informing the driver.
이때 차량은 액셀러레이터 페달에 인가된 압력 정보에 기초하여 제동력이 발생되도록 제동 장치를 제어할 수 있다.At this time, the vehicle may control the braking device so that the braking force is generated based on the pressure information applied to the accelerator pedal.
차량은 액셀러레이터 페달의 동작 모드를 전환한 상태에서 운전자에 의해 브레이크 페달이 조작되는지 판단(212)하고 운전자에 의해 브레이크 페달이 조작되었다고 판단되면 액셀러레이터 페달의 동작 모드를 복귀(213)시킨다.The vehicle determines whether the brake pedal is operated by the driver in a state in which the operating mode of the accelerator pedal is switched (212), and when the brake pedal is operated by the driver, the operation mode of the accelerator pedal is returned (213).
즉 차량은 액셀러레이터 페달의 조작에 의한 동작을 가속을 수행하는 동작으로 전환할 수 있다. 이때 차량은 액셀러레이터 페달에 인가된 압력 정보에 기초하여 가속력이 발생되도록 동력 장치를 제어할 수 있다.That is, the vehicle can convert the operation by operating the accelerator pedal into an operation for accelerating. At this time, the vehicle may control the power unit to generate an acceleration force based on the pressure information applied to the accelerator pedal.
여기서 액셀러레이터 페달의 동작 모드를 복귀시키는 것은, 액셀러레이터 페달의 조작에 대한 제어권을 운전자에게 천이하는 것을 포함할 수 있다.Here, returning the operation mode of the accelerator pedal may include shifting control of the operation of the accelerator pedal to the driver.
차량은 액셀러레이터 페달의 가압에 의한 가속 제한을 해제하고 경고 출력을 정지시킬 수 있다.The vehicle can release the acceleration limit by pressing the accelerator pedal and stop the warning output.
차량은 판단된 필요 동작이 가속 동작이라고 판단(214)되면 액셀러레이터 페달이 조작되었는지 판단(215)하고 액셀러레이터 페달이 조작되지 않았다고 판단되면 운전자에 의해 브레이크 페달이 조작되었다고 판단하여 브레이크 페달 조작에 의한 제동을 제한하고 경고를 출력(216)한다.When the vehicle determines that the determined necessary operation is an acceleration operation (214), it determines whether the accelerator pedal has been operated (215), and if it is determined that the accelerator pedal has not been operated, the driver determines that the brake pedal has been operated and brakes by brake pedal operation. Limit and print a warning (216).
다시 말해, 운전자의 페달 조작 의도가 있었으나, 운전자에 의해 조작된 페달은 액셀러레이터 페달이 아닌 운전자의 실수에 의한 브레이크 페달이라고 판단할 수 있다. 이에 따라 차량은 브레이크 페달에 의해 발생되는 차량의 제동력을 제한한다. In other words, although the driver intended to operate the pedal, it can be determined that the pedal operated by the driver is not an accelerator pedal, but a brake pedal caused by a driver's mistake. Accordingly, the vehicle limits the braking force of the vehicle generated by the brake pedal.
즉 차량은 브레이크 페달에 의해 제동될 수 있는 제동력을 미리 설정된 비율인 30%로 제한함으로써 차량의 제동을 제한할 수 있다. That is, the vehicle can limit the braking of the vehicle by limiting the braking force that can be braked by the brake pedal to 30%, which is a preset ratio.
아울러 차량은 차량의 최대 제동력을 제한하는 것도 가능하고, 브레이크 페달에 인가된 압력별 제동력을 제한하는 것도 가능하다.In addition, the vehicle can limit the maximum braking force of the vehicle, and it is also possible to limit the braking force for each pressure applied to the brake pedal.
경고를 출력하는 것은, 사운드 출력부를 통해 '브레이크 페달을 밟고 있습니다. 브레이크 페달에서 발을 떼세요'라는 음성을 출력하는 것도 가능하다.To output a warning, 'press the brake pedal through the sound output. It is also possible to output the voice 'Please take your foot off the brake pedal'.
경고를 출력하는 것은, 표시부 및 차량용 단말기 중 적어도 하나를 이용하여 '브레이크 페달을 밟고 있습니다. 브레이크 페달에서 발을 떼세요'라는 메시지를 출력하는 것도 가능하다.To output the warning, use at least one of the display unit and the vehicle terminal to 'press the brake pedal. It is also possible to print the message 'Please take your foot off the brake pedal'.
경고를 출력하는 것은, 운전석의 시트나, 시트 벨트를 통해 진동을 출력하는 것을 포함할 수 있다.Outputting the warning may include outputting a vibration through the seat of the driver's seat or a seat belt.
차량은 경고를 출력하는 상태에서 운전자에 의해 액셀러레이터 페달이 조작되는지 판단(217)하고 운전자에 의해 액셀러레이터 페달이 조작되었다고 판단되면 제동 제한을 해제(218)한다.The vehicle determines whether the accelerator pedal is operated by the driver in the state of outputting a warning (217) and releases the braking restriction (218) when it is determined that the accelerator pedal is operated by the driver.
즉 차량은 브레이크 페달의 조작에 의한 동작을 제동을 수행하는 동작으로 전환할 수 있다. 이때 차량은 브레이크 페달에 인가된 압력 정보에 기초하여 제동력이 발생되도록 제동 장치를 제어할 수 있다.That is, the vehicle can convert the operation by operating the brake pedal into an operation for performing braking. At this time, the vehicle may control the braking device so that the braking force is generated based on the pressure information applied to the brake pedal.
요약하여 설명하면, 도 5에 도시된 바와 같이, 차량은 운전자의 페달 조작 의도를 판단(A구간)하고, 페달 오조작에 대한 경고를 출력(B구간)하며, 동작 모드를 전환(C구간)하고, 운전자가 페달 오조작 인지 후 필요 동작에 대응하는 페달을 조작(D구간)하면 제한 제어를 해제하고 동작 모드를 복귀(E구간)시킬 수 있다.In summary, as shown in FIG. 5, the vehicle determines the driver's intention to operate the pedal (Section A), outputs a warning about the pedal misoperation (Section B), and switches the operation mode (Section C). Then, when the driver recognizes the pedal misoperation and operates the pedal corresponding to the required operation (section D), the limit control may be released and the operation mode may be returned (section E).
차량은 A구간 동안, 장애물과 충돌 위험이 존재하는 상태에서 운전자가 집중 상태이면 회피 여부를 판단하고 회피 의도가 없다고 판단하였을 때 제동 동작이 필요한 상황인지 판단하고 제동 동작이 필요한 상황이라고 판단하였을 때 액셀러레이터 페달이나 브레이크 페달로부터 압력 정보가 수신되는지 판단함으로써 충돌 위험 시 운전자의 의도를 판단할 수 있다.During section A, if the driver is in a concentrated state in the presence of an obstacle and a collision risk, the vehicle determines whether to avoid, and if it is determined that there is no intention to avoid, determines whether a braking operation is necessary and an accelerator when it is determined that a braking operation is necessary. By determining whether pressure information is received from the pedal or brake pedal, it is possible to determine the driver's intention in the event of a collision.
차량은 B구간 동안, 제동 동작이 필요한 상황에서 액셀러레이터 페달이 조작되었다고 판단되면 페달 오조작에 대한 경고를 출력하고, 가속 제한을 수행한다.When the vehicle determines that the accelerator pedal is operated in a situation in which a braking operation is required during section B, the vehicle outputs a warning about a malfunction of the pedal and performs acceleration limitation.
차량은 C구간 동안, 페달 오조작에 대한 경고를 출력하는 상태에서 액셀러레이터 페달의 조작이 유지되는지 판단하고, 액셀러레이터 페달의 조작이 유지되고 있다고 판단되면 액셀러레이터 페달의 동작 모드를 전환함으로써 제동력이 발생되도록 한다. 이를 운전자에게 알려 준다.The vehicle determines whether the operation of the accelerator pedal is maintained while outputting a warning about a pedal misoperation during section C. If it is determined that the operation of the accelerator pedal is maintained, a braking force is generated by switching the operation mode of the accelerator pedal. . Inform the driver.
차량은 D구간 동안, 페달 오조작에 대한 경고를 출력하는 상태에서 액셀러레이터 페달의 조작이 유지되는지 판단하고, 이때 액셀러레이터 페달의 조작이 해제되었다고 판단되면 제동력을 유지시키고 경고 출력을 정지시킨다.During section D, the vehicle determines whether the operation of the accelerator pedal is maintained in the state of outputting a warning about the pedal misoperation. At this time, if it is determined that the operation of the accelerator pedal is released, the braking force is maintained and the warning output is stopped.
차량은 E구간 동안, 브레이크 페달이 가압되었다고 판단되면 액셀러레이터 페달의 동작 모드를 복귀시킴으로써 액셀러레이터 페달의 가압에 대응하여 가속력이 발생되도록 한다.During the E section, if it is determined that the brake pedal is pressurized, the vehicle returns to the operation mode of the accelerator pedal so that an acceleration force is generated in response to the pressurization of the accelerator pedal.
차량은 클러스터나 사이드 미러의 경보등으로 1차 위험을 알리고, 경고등으로 시각적 경고를 수행하고 동시에 시트 벨트를 통해 진동을 출력하는 것도 가능하다.It is also possible for the vehicle to inform the primary danger by warning lights of clusters or side mirrors, to perform visual warnings with warning lights, and to output vibrations through the seat belt at the same time.
그리고 차량은 언제나 제동이 즉시 가능하도록 하는 브레이크를 작동 대기(Pre fill) 상태로 유지시킬 수 있다.In addition, the vehicle can always maintain the brake in a pre-fill state, which enables immediate braking.
또한 차량은 장애물과의 충돌을 피하기 어려운 극도의 위험 상황이 발생하면 일정 한도 내에서 차량을 자동 감속(Pre brake)하고 위험도에 따라 가변 제동력 보조(Brake assist system: BAS) 기능도 작동시키고 시트 벨트를 당겨 운전자의 몸을 좌석에 밀착시키도록 하는 것도 가능하다.In addition, when an extremely dangerous situation in which it is difficult to avoid collision with an obstacle occurs, the vehicle automatically decelerates within a certain limit (Pre brake), activates a variable brake assist system (BAS) function according to the risk, and activates the seat belt. It is also possible to pull the driver's body into close contact with the seat.
한편, 개시된 실시예들은 컴퓨터에 의해 실행 가능한 명령어를 저장하는 기록매체의 형태로 구현될 수 있다. 명령어는 프로그램 코드의 형태로 저장될 수 있으며, 프로세서에 의해 실행되었을 때, 프로그램 모듈을 생성하여 개시된 실시예들의 동작을 수행할 수 있다. 기록매체는 컴퓨터로 읽을 수 있는 기록매체로 구현될 수 있다.Meanwhile, the disclosed embodiments may be implemented in the form of a recording medium that stores instructions executable by a computer. Instructions may be stored in the form of program code, and when executed by a processor, may generate program modules to perform operations of the disclosed embodiments. The recording medium may be embodied as a computer-readable recording medium.
컴퓨터가 읽을 수 있는 기록매체로는 컴퓨터에 의하여 해독될 수 있는 명령어가 저장된 모든 종류의 기록 매체를 포함한다. 예를 들어, ROM(Read Only Memory), RAM(Random Access Memory), 자기 테이프, 자기 디스크, 플래쉬 메모리, 광 데이터 저장장치 등이 있을 수 있다. The computer-readable recording medium includes all kinds of recording media storing instructions that can be read by a computer. For example, there may be a read only memory (ROM), a random access memory (RAM), a magnetic tape, a magnetic disk, a flash memory, and an optical data storage device.
이상에서와 같이 첨부된 도면을 참조하여 개시된 실시예들을 설명하였다.본 발명이 속하는 기술분야에서 통상의 지식을 가진 자는 본 발명의 기술적 사상이나 필수적인 특징을 변경하지 않고도, 개시된 실시예들과 다른 형태로 본 발명이 실시될 수 있음을 이해할 것이다. 개시된 실시예들은 예시적인 것이며, 한정적으로 해석되어서는 안 된다.The disclosed embodiments have been described with reference to the accompanying drawings as described above. Those skilled in the art to which the present invention pertains have different forms from the disclosed embodiments without changing the technical spirit or essential features of the present invention. It will be understood that the invention can be practiced with. The disclosed embodiments are illustrative and should not be construed as limiting.
100: 차량 111: 스티어링 휠
112: 브레이크 페달 113: 액셀러레이터 페달
120: 주행 상황 정보 획득부 130: 의도 정보 획득부 100: vehicle 111: steering wheel
112: brake pedal 113: accelerator pedal
120: driving situation information acquisition unit 130: intention information acquisition unit
Claims (23)
운전자의 의도에 대응하는 정보를 획득하는 의도 정보 획득부; 및
상기 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 상기 장애물과의 위치 정보에 기초하여 상기 장애물과 충돌 위험이 존재하는지 판단하고, 상기 장애물과 충돌 위험이 존재한다고 판단되면 상기 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 상기 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 상기 판단된 운전자의 페달 조작의도와 상기 판단된 필요 동작이 상이하면 페달 오조작으로 판단하는 제어부; 및
상기 페달 오조작에 대응하는 경고를 출력하는 사운드 출력부를 포함하는 차량.A driving situation information obtaining unit that acquires information corresponding to the driving situation;
An intention information acquisition unit that acquires information corresponding to the driver's intention; And
Obtain position information of an obstacle based on information obtained from the driving condition information acquisition unit, determine whether there is a collision risk with the obstacle based on the position information with the obstacle, and determine that there is a collision risk with the obstacle When it is determined, a necessary operation is determined based on the location information of the obstacle, a driver's intention to operate the pedal is determined based on the information obtained from the intention information obtaining unit, and the determined driver's intention to operate the pedal and the determined required operation If it is different, the control unit determines that the pedal is misoperated; And
A vehicle including a sound output unit outputting a warning corresponding to the pedal misoperation.
상기 주행 상황 획득부는, 상기 장애물과의 거리에 대한 정보를 검출하는 거리 검출부와, 주행 속도를 검출하는 속도 검출부를 포함하고,
상기 제어부는, 상기 장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나를 획득하고 상기 획득된 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나에 기초하여 상기 장애물과 출동 위험이 존재하는지 판단하는 것을 포함하는 차량.According to claim 1,
The driving situation acquiring unit includes a distance detecting unit that detects information on the distance to the obstacle, and a speed detecting unit that detects the traveling speed,
The control unit acquires at least one of a relative distance, a relative speed, and an estimated collision time with the obstacle based on a distance and a traveling speed from the obstacle, and the obtained relative distance, relative speed, and expected collision time with the obstacle And determining whether there is an obstacle and a moving hazard based on at least one.
상기 주행 상황 획득부는, 상기 장애물과의 거리에 대한 정보를 검출하는 거리 검출부와, 주행 속도를 검출하는 속도 검출부를 포함하고,
상기 제어부는, 상기 장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간을 획득하고 상기 획득된 장애물과의 상대 거리에 대응하는 위험도, 상기 획득된 상대 속도에 대응하는 위험도 및 상기 획득된 충돌 예상 시간에 대응하는 위험도 중 적어도 하나에 기초하여 상기 장애물과 출동 위험이 존재하는지 판단하는 것을 포함하는 차량.According to claim 1,
The driving situation acquiring unit includes a distance detecting unit that detects information on the distance to the obstacle, and a speed detecting unit that detects the traveling speed,
The control unit acquires a relative distance, relative speed, and an estimated collision time with respect to the obstacle based on a distance and a traveling speed from the obstacle and a risk corresponding to the obtained relative distance from the obstacle and the obtained relative speed. And determining whether there is an obstacle and a moving hazard based on at least one of a corresponding risk and a risk corresponding to the obtained collision prediction time.
상기 주행 상황 획득부는, 현재 위치에 대한 위치 정보를 수신하는 위치 수신부를 더 포함하고,
상기 제어부는, 상기 수신된 위치 정보에 대응하는 도로의 종류를 확인하고 확인된 도로의 종류에 대응하는 가중치를 확인하고, 상기 확인된 가중치에 기초하여 상기 적어도 하나의 위험도를 조정하는 것을 더 포함하는 차량.The method of claim 3,
The driving situation acquiring unit further includes a location receiving unit for receiving location information about the current location,
The control unit further comprises: checking the type of the road corresponding to the received location information, checking a weight corresponding to the identified type of road, and adjusting the at least one risk based on the identified weight vehicle.
상기 의도 정보 획득부는, 브레이크 페달에 인가된 압력을 검출하는 제1가압 검출부와, 액셀러레이터 페달에 인가된 압력을 검출하는 제2가압 검출부를 포함하고,
상기 제어부는, 상기 제1가압 검출부 및 상기 제2가압 검출부 중 어느 하나로부터 압력 정보가 수신되면 상기 운전자의 페달 조작 의도로 판단하는 것을 포함하는 차량.According to claim 1,
The intention information acquisition unit includes a first pressure detection unit for detecting the pressure applied to the brake pedal, and a second pressure detection unit for detecting the pressure applied to the accelerator pedal,
The control unit, when the pressure information is received from any one of the first pressure detection unit and the second pressure detection unit, the vehicle comprising determining that the driver intends to operate the pedal.
상기 판단된 필요 동작이 제동 동작일 때 상기 제2가압 검출부로부터 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하는 것을 포함하는 차량.The method of claim 5, wherein the control unit,
And when the pressure information is received from the second pressing force detection unit when the determined required operation is the braking operation, the vehicle comprising limiting the acceleration amount by a preset ratio.
상기 판단된 필요 동작이 제동 동작일 때 상기 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하는 것을 포함하는 차량.The method of claim 5, wherein the control unit,
A vehicle that includes a control mode for switching the operation mode of the accelerator pedal to generate a braking force when the determined necessary operation is a braking operation.
상기 액셀러레이터 페달의 동작 모드를 전환 제어 중, 상기 제1가압 검출부로부터 압력 정보가 수신되면 상기 액셀러레이터 페달의 동작 모드를 복귀 제어하여 가속 제어가 수행되도록 하는 것을 포함하는 차량.The method of claim 7, wherein the control unit,
A vehicle comprising, during switching control of the operation mode of the accelerator pedal, when pressure information is received from the first pressure detection unit, controlling the operation mode of the accelerator pedal to perform acceleration control.
상기 판단된 필요 동작이 가속 동작일 때 상기 제1가압 검출부로부터 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하는 것을 포함하는 차량.The method of claim 5, wherein the control unit,
And when the determined necessary operation is an acceleration operation, when the pressure information is received from the first pressurization detection unit, controlling the braking force by a preset ratio.
상기 제동력을 제한 제어 중, 상기 제2가압 검출부로부터 압력 정보가 수신되면 제동력의 제한 해제 제어를 수행하는 것을 포함하는 차량.The method of claim 9, wherein the control unit,
A vehicle comprising, during limit control of the braking force, performing restriction release control of the braking force when pressure information is received from the second pressure detecting unit.
상기 의도 정보 획득부는, 스티어링 휠의 조향각을 검출하는 조향각 검출부를 포함하고,
상기 제어부는, 상기 장애물과 충돌 위험이 존재할 때 상기 조향각 검출부를 통해 조향각 정보가 수신되면 운전자의 회피 의도가 존재한다고 판단하는 것을 포함하는 차량.According to claim 1,
The intention information obtaining unit includes a steering angle detection unit that detects a steering angle of the steering wheel,
When the steering angle information is received through the steering angle detection unit when there is a danger of collision with the obstacle, the control unit determines that a driver's intention to avoid exists.
상기 의도 정보 획득부는, 상기 운전자의 영상을 획득하는 영상 획득부를 포함하고,
상기 제어부는, 상기 운전자의 영상에서 운전자의 눈을 인식하고 인식된 눈의 위치에 기초하여 운전자가 집중 상태인지를 판단하고, 운전자가 집중 상태라고 판단되면 페달 조작 의도를 판단하는 것을 포함하는 차량.According to claim 1,
The intention information acquisition unit includes an image acquisition unit that acquires the image of the driver,
The control unit, the vehicle including the driver's eyes in the image of the driver and determining whether the driver is in a focused state based on the recognized position of the eye, and determining the intention to operate the pedal when the driver is determined to be in a focused state.
상기 페달 오조작에 대응하는 경고를 출력하는 표시부를 더 포함하는 차량.According to claim 1,
And a display unit configured to output a warning corresponding to the pedal misoperation.
운전자의 의도에 대응하는 정보를 획득하는 의도 정보 획득부; 및
상기 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 상기 장애물과의 위치 정보에 기초하여 상기 장애물과 충돌 위험이 존재하는지 판단하고, 상기 장애물과 충돌 위험이 존재한다고 판단되면 상기 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 상기 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 상기 판단된 운전자의 페달 조작의도와 상기 판단된 필요 동작이 상이하면 상기 운전자에 의해 조작된 페달에 의해 발생되는 출력을 제한 제어하는 제어부를 포함하는 차량.A driving situation information obtaining unit that acquires information corresponding to the driving situation;
An intention information acquisition unit that acquires information corresponding to the driver's intention; And
Obtain position information of an obstacle based on information obtained from the driving condition information acquisition unit, determine whether there is a collision risk with the obstacle based on the position information with the obstacle, and determine that there is a collision risk with the obstacle When it is determined, a necessary operation is determined based on the location information of the obstacle, a driver's intention to operate the pedal is determined based on the information obtained from the intention information obtaining unit, and the determined driver's intention to operate the pedal and the determined required operation If it is different, the vehicle includes a control unit for limiting the output generated by the pedal operated by the driver.
상기 의도 정보 획득부는, 브레이크 페달에 인가된 압력을 검출하는 제1가압 검출부와, 액셀러레이터 페달에 인가된 압력을 검출하는 제2가압 검출부를 포함하고,
상기 제어부는, 상기 제1가압 검출부 및 상기 제2가압 검출부 중 어느 하나로부터 압력 정보가 수신되면 상기 운전자의 페달 조작 의도로 판단하는 것을 포함하는 차량.The method of claim 14,
The intention information acquisition unit includes a first pressure detection unit for detecting the pressure applied to the brake pedal, and a second pressure detection unit for detecting the pressure applied to the accelerator pedal,
The control unit, when the pressure information is received from any one of the first pressure detection unit and the second pressure detection unit, the vehicle comprising determining that the driver intends to operate the pedal.
상기 판단된 필요 동작이 제동 동작일 때 상기 제2가압 검출부로부터 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하는 것을 포함하는 차량.The method of claim 15, wherein the control unit,
And when the pressure information is received from the second pressurization detection unit when the determined necessary operation is the braking operation, the vehicle comprising limiting the acceleration amount by a preset ratio.
상기 판단된 필요 동작이 제동 동작일 때 상기 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하고, 상기 액셀러레이터 페달의 동작 모드를 전환 제어 중, 상기 제1가압 검출부로부터 압력 정보가 수신되면 상기 액셀러레이터 페달의 동작 모드를 복귀 제어하여 가속 제어가 수행되도록 하는 것을 포함하는 차량.The method of claim 15, wherein the control unit,
When the determined necessary operation is the braking operation, the operation mode of the accelerator pedal is switched to control the braking force to be generated, and during the control operation of the operation mode of the accelerator pedal, when pressure information is received from the first pressure detection unit, the accelerator A vehicle comprising controlling an operation mode of a pedal to return to perform acceleration control.
상기 판단된 필요 동작이 가속 동작일 때 상기 제1가압 검출부로부터 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하고, 상기 제동력을 제한 제어 중, 상기 제2가압 검출부로부터 압력 정보가 수신되면 제동력의 제한 해제 제어를 수행하는 것을 포함하는 차량.The method of claim 15, wherein the control unit,
When the determined necessary operation is an acceleration operation, when pressure information is received from the first pressure detection unit, the braking force is limitedly controlled by a preset ratio, and during the limit control of the braking force, when pressure information is received from the second pressure detection unit The vehicle comprising the control of lifting the limit.
상기 장애물과의 위치 정보에 기초하여 상기 장애물과 충돌 위험이 존재하는지 판단하고,
상기 장애물과 충돌 위험이 존재한다고 판단되면 상기 장애물의 위치 정보에 기초하여 필요 동작을 판단하고,
상기 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고,
상기 판단된 필요 동작이 제동 동작일 때 액셀러레이터 페달의 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하고,
상기 판단된 필요 동작이 가속 동작일 때 브레이크 페달의 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하고,
상기 판단된 운전자의 페달 조작의도와 상기 판단된 필요 동작이 상이하면 페달 오조작에 대응하는 경고를 출력하는 것을 포함하는 차량의 제어 방법.Obtain the position information of the obstacle based on the information obtained from the driving situation information acquisition unit,
It is determined whether there is a danger of collision with the obstacle based on the location information with the obstacle,
When it is determined that there is a danger of collision with the obstacle, a necessary operation is determined based on the location information of the obstacle,
Based on the information obtained from the intention information acquisition unit to determine the driver's intention to operate the pedal,
When pressure information of the accelerator pedal is received when the determined necessary operation is the braking operation, the amount of acceleration is limitedly controlled by a preset ratio,
When pressure information of the brake pedal is received when the determined necessary operation is an acceleration operation, the braking force is limitedly controlled by a preset ratio,
And outputting a warning corresponding to a pedal misoperation if the determined driver's intention to operate the pedal is different from the determined required operation.
상기 판단된 필요 동작이 제동 동작일 때 상기 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하는 것을 더 포함하는 차량의 제어 방법.The method of claim 19,
And controlling the operation mode of the accelerator pedal to generate a braking force when the determined necessary operation is a braking operation.
장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나를 획득하고,
상기 획득된 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나에 기초하여 상기 장애물과 출동 위험이 존재하는지 판단하는 것을 포함하는 차량의 제어 방법.The method of claim 19, wherein determining whether there is an obstacle and a moving hazard exists,
Obtain at least one of a relative distance from the obstacle, a relative speed, and an estimated collision time based on the distance from the obstacle and the driving speed,
And determining whether there is an obstacle and a moving hazard based on at least one of the obtained relative distance, relative speed, and expected collision time with the obstacle.
차량의 현재의 위치 정보에 대응하는 도로의 종류를 확인하고,
상기 확인된 도로의 종류에 대응하는 가중치를 확인하고,
장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간을 획득하고,
상기 획득된 장애물과의 상대 거리에 대응하는 위험도, 상기 획득된 상대 속도에 대응하는 위험도 및 상기 획득된 충돌 예상 시간에 대응하는 위험도 중 적어도 하나를 확인하고,
상기 확인된 가중치에 기초하여 상기 확인된 적어도 위험도를 조정하는 것을 포함하는 차량의 제어 방법.The method of claim 19, wherein determining whether there is an obstacle and a moving hazard exists,
Check the type of road corresponding to the current location information of the vehicle,
Check the weight corresponding to the identified type of road,
Obtaining a relative distance from the obstacle, a relative speed and an estimated collision time based on the distance from the obstacle and the driving speed,
Confirming at least one of a risk corresponding to a relative distance from the obtained obstacle, a risk corresponding to the obtained relative speed, and a risk corresponding to the estimated expected collision time,
And adjusting the identified at least risk based on the identified weight.
사운드, 메시지 및 진동 중 적어도 하나를 출력하는 것을 포함하는 차량의 제어 방법.The method of claim 19, wherein outputting the warning,
A method of controlling a vehicle comprising outputting at least one of sound, message and vibration.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180142492A KR20200058642A (en) | 2018-11-19 | 2018-11-19 | Vehicle and method for controlling thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180142492A KR20200058642A (en) | 2018-11-19 | 2018-11-19 | Vehicle and method for controlling thereof |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200058642A true KR20200058642A (en) | 2020-05-28 |
Family
ID=70920236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180142492A KR20200058642A (en) | 2018-11-19 | 2018-11-19 | Vehicle and method for controlling thereof |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200058642A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112721939A (en) * | 2021-01-15 | 2021-04-30 | 南京航空航天大学 | Driver braking intention identification method based on multi-sensor fusion |
| CN114103635A (en) * | 2021-12-08 | 2022-03-01 | 安徽江淮汽车集团股份有限公司 | Method and system for preventing vehicle from stepping on accelerator mistakenly |
| CN114274791A (en) * | 2022-01-07 | 2022-04-05 | 江铃汽车股份有限公司 | Torque control method for forward and reverse switching of running direction of pure electric vehicle |
-
2018
- 2018-11-19 KR KR1020180142492A patent/KR20200058642A/en not_active Application Discontinuation
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112721939A (en) * | 2021-01-15 | 2021-04-30 | 南京航空航天大学 | Driver braking intention identification method based on multi-sensor fusion |
| CN114103635A (en) * | 2021-12-08 | 2022-03-01 | 安徽江淮汽车集团股份有限公司 | Method and system for preventing vehicle from stepping on accelerator mistakenly |
| CN114274791A (en) * | 2022-01-07 | 2022-04-05 | 江铃汽车股份有限公司 | Torque control method for forward and reverse switching of running direction of pure electric vehicle |
| CN114274791B (en) * | 2022-01-07 | 2023-12-12 | 江铃汽车股份有限公司 | Torque control method for forward and reverse switching in running direction of pure electric vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102588920B1 (en) | Advanced Driver Assistance System, Vehicle having the same and method for controlling the vehicle | |
| KR20210083462A (en) | Advanced Driver Assistance System, Vehicle having the same and method for controlling the vehicle | |
| JP4309843B2 (en) | Method and apparatus for preventing vehicle collision | |
| JP6269606B2 (en) | Vehicle control device | |
| KR20200142155A (en) | Advanced Driver Assistance System, Vehicle having the same and method for controlling the vehicle | |
| CN112706763A (en) | Vehicle and method of controlling the same | |
| US11104348B2 (en) | Vehicle alarm apparatus | |
| KR20200098774A (en) | Vehicle and method for controlling the same | |
| US20210197824A1 (en) | Advanced driver assistance system, vehicle having the same and method for controlling the vehicle | |
| JP5716700B2 (en) | Driving assistance device | |
| KR102367952B1 (en) | Vision System, Vehicle having the same and method for controlling the vehicle | |
| CN111830859B (en) | Vehicle remote indication system | |
| US20220332319A1 (en) | Advanced driver assistance system, and vehicle having the same | |
| KR20200058642A (en) | Vehicle and method for controlling thereof | |
| KR20220128507A (en) | Advanced Driver Assistance System, and Vehicle having the same | |
| KR20210030529A (en) | Advanced Driver Assistance System, Vehicle having the same and method for controlling the same | |
| KR20220119229A (en) | Advanced Driver Assistance System, and Vehicle having the same | |
| JP2017151704A (en) | Automatic driving device | |
| KR102367959B1 (en) | Driver Assistance Display Device, Vehicle having the same and method for controlling the same | |
| KR20230089780A (en) | Method and apparatus for collision avoidance | |
| KR20070088879A (en) | Control system of distance between cars | |
| KR102425036B1 (en) | Vehicle and method for controlling thereof | |
| KR20230159773A (en) | Vehicle collision-avoidance system and vehicle equipped with the system and collision-avoidance method thereof | |
| KR20230130202A (en) | Advanced driver assistance system and vehicle having the same | |
| KR20230172054A (en) | Vehicle collision-avoidance system and vehicle equipped with the system and collision-avoidance method thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal |