JP7242537B2 - 組織判別に基づく位置検出 - Google Patents
組織判別に基づく位置検出 Download PDFInfo
- Publication number
- JP7242537B2 JP7242537B2 JP2019542687A JP2019542687A JP7242537B2 JP 7242537 B2 JP7242537 B2 JP 7242537B2 JP 2019542687 A JP2019542687 A JP 2019542687A JP 2019542687 A JP2019542687 A JP 2019542687A JP 7242537 B2 JP7242537 B2 JP 7242537B2
- Authority
- JP
- Japan
- Prior art keywords
- tissue
- interest
- region
- distal end
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7032—Screws or hooks with U-shaped head or back through which longitudinal rods pass
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/84—Fasteners therefor or fasteners being internal fixation devices
- A61B17/86—Pins or screws or threaded wires; nuts therefor
- A61B17/864—Pins or screws or threaded wires; nuts therefor hollow, e.g. with socket or cannulated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/88—Osteosynthesis instruments; Methods or means for implanting or extracting internal or external fixation devices
- A61B17/8897—Guide wires or guide pins
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
- A61B5/0035—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room adapted for acquisition of images from more than one imaging mode, e.g. combining MRI and optical tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00057—Light
- A61B2017/00061—Light spectrum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/102—Modelling of surgical devices, implants or prosthesis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/371—Surgical systems with images on a monitor during operation with simultaneous use of two cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/373—Surgical systems with images on a monitor during operation using light, e.g. by using optical scanners
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/373—Surgical systems with images on a monitor during operation using light, e.g. by using optical scanners
- A61B2090/3735—Optical coherence tomography [OCT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0075—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence by spectroscopy, i.e. measuring spectra, e.g. Raman spectroscopy, infrared absorption spectroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Neurology (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Gynecology & Obstetrics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Surgical Instruments (AREA)
Description
104 X線デバイス又はシステム
106 ベースフレーム
108 車輪
110 Cアーム
112 テーブル
114 患者
116 第1の軸
118 第2の軸
120 X線源
122 X線検出器
124 カメラ
126 処理ユニット
128 モニタ
130 更なるカメラ
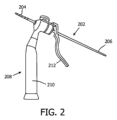
202 K-ワイヤ
204 先端部
206 後端部
208 器具
210 グリップ部
212 ハンドル
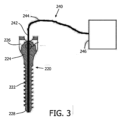
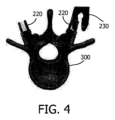
220 スクリュー
222 本体部
224 ネック部
226 ヘッド部
230 ツール
240 光学検知デバイス
242 プローブ又はスタイレット
244 光学ガイド又はファイバ
246 光学コンソール
248 組織検知
250 デバイス
252 デバイスの先端
300 椎骨
302 海綿骨
Claims (11)
- 遠位端を有する光学ガイドを含む光学検知デバイスと、
処理ユニットと、
を含む、組織に挿入可能なデバイスの位置を決定するシステムであって、
前記光学ガイドは、前記挿入可能なデバイス内に配置可能であり、
前記処理ユニットは、
(i)様々な種類の組織を含む関心領域の組織の種類の情報を受信し、
(ii)前記関心領域を通る経路を特定する入力を受信し、
(iii)受信した前記組織の種類の情報に基づいて、特定した前記経路に沿った一連の組織の種類を決定し、
(iv)前記光学検知デバイスから光学情報を受信し、
(v)受信した前記光学情報に基づいて、前記光学ガイドの前記遠位端における組織の種類を決定し、
(vi)決定された前記遠位端における組織の種類を、前記経路に沿った前記一連の組織の種類と比較し、
(vii)前記組織の種類の前記比較に基づいて、前記経路上の前記光学ガイドの前記遠位端の可能な位置を決定し、
(viii)受信した前記光学情報に基づいて決定された前記遠位端における組織の種類と、前記関心領域を通る前記経路に沿った前記可能な位置に対する可能な前記組織の種類との不一致を示す信号を生成する、システム。 - 前記関心領域に対する前記光学ガイドの前記遠位端の位置を追跡する追跡デバイスを更に含み、前記可能な位置の前記決定は更に、追跡された前記位置に基づく、請求項1に記載のシステム。
- 前記追跡デバイスは、電磁追跡、光学追跡及び/又は形状検知のための要素を含む、請求項2に記載のシステム。
- 前記処理ユニットは更に、前記関心領域の視覚化を、前記関心領域に挿入される前記デバイスの仮想表現と共に生成し、前記デバイスの前記仮想表現の遠位端は、前記経路上の最も可能性のある位置に示される、請求項1から3の何れか一項に記載のシステム。
- 前記関心領域を含む作業フィールドを撮像するビデオカメラを更に含み、前記処理ユニットは更に、前記作業フィールドと前記関心領域の内部構造との組み合わされた視覚化を生成する、請求項1から4の何れか一項に記載のシステム。
- 様々な種類の組織を含む関心領域の情報を生成する撮像システムを更に含み、前記撮像システムは、X線撮像システム、MR撮像システム、CT撮像システム及び超音波撮像システムからなる群からの医用撮像システムである、請求項1から5の何れか一項に記載のシステム。
- 前記デバイスを前記組織に挿入するための器具を更に含み、前記器具の位置及び向きは、前記追跡デバイスによって追跡可能であり、生成された視覚化は、前記器具の前記関心領域に対する関係の表示を含む、請求項2又は3の何れか一項に記載のシステム。
- 組織に挿入可能な前記デバイスは、スクリュー、K-ワイヤ、突き錐及びタップからなる群からのデバイスである、請求項1から7の何れか一項に記載のシステム。
- 組織に挿入可能なデバイスの位置を決定する方法であって、
様々な種類の組織を含む関心領域の組織の種類の情報と、前記関心領域を通る経路を特定する入力とを受信するステップと、
関心領域内に特定された経路に沿った一連の組織の種類を決定するステップと、
光学情報に基づいて、光学ガイドの遠位端における組織の種類を決定するステップと、
前記遠位端における決定された前記組織の種類を、前記経路上の前記組織の種類と比較するステップと、
前記経路上の前記光学ガイドの前記遠位端の可能な位置を決定するステップと、
前記遠位端における決定された前記組織の種類と、前記関心領域を通る前記経路に沿った前記可能な位置に対応する前記一連の組織の種類からの組織の種類との不一致を示すステップと、
を含む、方法。 - 前記関心領域の視覚化を、前記関心領域に挿入可能なデバイスの仮想表現と共に生成するステップを更に含み、前記挿入可能なデバイスの前記仮想表現の遠位端は、前記経路上の最も可能性の高い位置に示される、請求項9に記載の方法。
- 請求項1に記載のシステムの処理ユニットで実行されると、請求項9に記載の方法のステップを行う命令のセットを含む、コンピュータプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17155320 | 2017-02-09 | ||
| EP17155320.9 | 2017-02-09 | ||
| PCT/EP2018/052989 WO2018146112A1 (en) | 2017-02-09 | 2018-02-07 | Position detection based on tissue discrimination |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020508097A JP2020508097A (ja) | 2020-03-19 |
| JP2020508097A5 JP2020508097A5 (ja) | 2021-03-18 |
| JP7242537B2 true JP7242537B2 (ja) | 2023-03-20 |
Family
ID=58094176
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019542687A Active JP7242537B2 (ja) | 2017-02-09 | 2018-02-07 | 組織判別に基づく位置検出 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US11497562B2 (ja) |
| EP (1) | EP3579781B1 (ja) |
| JP (1) | JP7242537B2 (ja) |
| CN (1) | CN110381875B (ja) |
| WO (1) | WO2018146112A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117885097A (zh) * | 2017-03-07 | 2024-04-16 | 直观外科手术操作公司 | 用于控制具有可铰接远侧部分的工具的系统和方法 |
| EP3932357A1 (en) * | 2020-07-01 | 2022-01-05 | Koninklijke Philips N.V. | System for assisting a user in placing a penetrating device in tissue |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090163901A1 (en) | 2007-12-19 | 2009-06-25 | Depuy Spine, Inc. | Smart pedicle tool |
| US20120059251A1 (en) | 2009-05-28 | 2012-03-08 | Koninklijke Philips Electronics N.V. | Re-calibration of pre-recorded images during interventions using a needle device |
| US20140187917A1 (en) | 2012-12-31 | 2014-07-03 | Biosense Webster (Israel), Ltd. | Catheter with serially connected sensing structures and methods of calibration and detection |
| US20150080712A1 (en) | 2012-03-27 | 2015-03-19 | Koninklijke Philips N.V. | Integration delayed optical feedback in image guidance |
| JP2016174809A (ja) | 2015-03-20 | 2016-10-06 | テルモ株式会社 | 画像診断装置、その制御方法、プログラム及びコンピュータ可読記憶媒体 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6470207B1 (en) * | 1999-03-23 | 2002-10-22 | Surgical Navigation Technologies, Inc. | Navigational guidance via computer-assisted fluoroscopic imaging |
| US6869430B2 (en) * | 2000-03-31 | 2005-03-22 | Rita Medical Systems, Inc. | Tissue biopsy and treatment apparatus and method |
| EP1569558B1 (en) * | 2002-12-04 | 2017-08-23 | Philips Intellectual Property & Standards GmbH | Apparatus and method for assisting the navigation of a catheter in a vessel |
| US8092455B2 (en) | 2005-02-07 | 2012-01-10 | Warsaw Orthopedic, Inc. | Device and method for operating a tool relative to bone tissue and detecting neural elements |
| CN103622725B (zh) * | 2005-04-15 | 2018-02-02 | 塞基森斯公司 | 用于检测组织特性具有传感器的外科器械,和使用所述器械的系统 |
| WO2009111387A1 (en) * | 2008-03-03 | 2009-09-11 | Biospinex, Llc | Methods and devices for in situ tissue navigation |
| CN106943153B (zh) | 2008-12-11 | 2021-01-22 | 皇家飞利浦电子股份有限公司 | 用于产生患者内部和外部图像的系统和方法 |
| US8366719B2 (en) | 2009-03-18 | 2013-02-05 | Integrated Spinal Concepts, Inc. | Image-guided minimal-step placement of screw into bone |
| CN102781336B (zh) * | 2009-10-30 | 2016-01-20 | 约翰霍普金斯大学 | 用于外科手术干预的临床上重要的解剖标志的视觉跟踪和注释 |
| US20110196376A1 (en) | 2010-02-09 | 2011-08-11 | Burak Ozgur | Osteo-navigation |
| US11717165B2 (en) * | 2011-11-07 | 2023-08-08 | Koninklijke Philips N.V. | Detection apparatus for determining a state of tissue |
| WO2013140293A1 (en) * | 2012-03-23 | 2013-09-26 | Koninklijke Philips N.V. | Photonic needle system with measurement integration times depending on needle displacement speed |
| WO2013144799A1 (en) * | 2012-03-29 | 2013-10-03 | Koninklijke Philips N.V. | Mri method for assigning individual pixels or voxels tissue - specific pet attenuation values |
| US20140276200A1 (en) * | 2013-03-15 | 2014-09-18 | Covidien Lp | Microwave energy-delivery device and system |
| US20160081712A1 (en) * | 2013-04-29 | 2016-03-24 | The Charltte-Mecklenburg Hospital Authority D/B/A Carolinas Healthcare System | Device, system, and method for insertion of a medical device into a subject |
| EP3337419B1 (en) * | 2015-08-19 | 2020-08-12 | Brainlab AG | Reference array holder |
-
2018
- 2018-02-07 EP EP18706662.6A patent/EP3579781B1/en active Active
- 2018-02-07 WO PCT/EP2018/052989 patent/WO2018146112A1/en unknown
- 2018-02-07 JP JP2019542687A patent/JP7242537B2/ja active Active
- 2018-02-07 US US16/483,951 patent/US11497562B2/en active Active
- 2018-02-07 CN CN201880011150.9A patent/CN110381875B/zh active Active
-
2022
- 2022-06-24 US US17/848,490 patent/US11712310B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090163901A1 (en) | 2007-12-19 | 2009-06-25 | Depuy Spine, Inc. | Smart pedicle tool |
| US20120059251A1 (en) | 2009-05-28 | 2012-03-08 | Koninklijke Philips Electronics N.V. | Re-calibration of pre-recorded images during interventions using a needle device |
| US20150080712A1 (en) | 2012-03-27 | 2015-03-19 | Koninklijke Philips N.V. | Integration delayed optical feedback in image guidance |
| JP2015512709A (ja) | 2012-03-27 | 2015-04-30 | コーニンクレッカ フィリップス エヌ ヴェ | 画像ガイダンスにおける統合遅延光フィードバック |
| US20140187917A1 (en) | 2012-12-31 | 2014-07-03 | Biosense Webster (Israel), Ltd. | Catheter with serially connected sensing structures and methods of calibration and detection |
| JP2016174809A (ja) | 2015-03-20 | 2016-10-06 | テルモ株式会社 | 画像診断装置、その制御方法、プログラム及びコンピュータ可読記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018146112A1 (en) | 2018-08-16 |
| JP2020508097A (ja) | 2020-03-19 |
| CN110381875A (zh) | 2019-10-25 |
| US20200085506A1 (en) | 2020-03-19 |
| US20220313368A1 (en) | 2022-10-06 |
| US11497562B2 (en) | 2022-11-15 |
| US11712310B2 (en) | 2023-08-01 |
| EP3579781A1 (en) | 2019-12-18 |
| EP3579781B1 (en) | 2020-07-15 |
| CN110381875B (zh) | 2023-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5121401B2 (ja) | 埋植物距離測定のシステム | |
| US20190388155A1 (en) | Controlling a surgical intervention to a bone | |
| Helm et al. | Spinal navigation and imaging: history, trends, and future | |
| JP5328137B2 (ja) | 用具又は埋植物の表現を表示するユーザ・インタフェイス・システム | |
| CN103997982B (zh) | 将手术器械相对患者身体进行定位的机器人辅助装置 | |
| JP6700401B2 (ja) | 脊柱の領域、並びに、胸郭、骨盤又は頭部の隣接領域における、外科手術処置中の術中画像制御ナビゲーション装置 | |
| US11712310B2 (en) | Position detection based on tissue discrimination | |
| Bledsoe et al. | Accuracy of upper thoracic pedicle screw placement using three-dimensional image guidance | |
| CN114846517A (zh) | 确定2d医学图像中的对象之间的相对3d位置和取向 | |
| US20230301726A1 (en) | Systems, instruments and methods for surgical navigation with verification feedback | |
| US20240148455A1 (en) | Robotic spine systems and robotic-assisted methods for tissue modulation | |
| Liu et al. | Monitoring the reduced scattering coefficient of bone tissues on the trajectory of pedicle screw placement using near-infrared spectroscopy | |
| US20110196376A1 (en) | Osteo-navigation | |
| TWM570117U (zh) | 用於椎弓根螺釘微創定位的擴增實境裝置 | |
| US7340291B2 (en) | Medical apparatus for tracking movement of a bone fragment in a displayed image | |
| Sklar et al. | First case report using optical topographic-guided navigation in revision spinal fusion for calcified thoracic disk | |
| US20230134673A1 (en) | Orthopedic pin for optically analyzing a bone region | |
| TWI671763B (zh) | 用於椎弓根螺釘微創定位的擴增實境裝置 | |
| Sembrano et al. | Percutaneous pedicle screws | |
| Saghbiny et al. | Protocol for Electrical Conductivity Signal Collection and Processing in Scoliosis Surgery | |
| Swartman et al. | Intraoperative 3D Imaging of the Pelvic Ring | |
| Kalfas | Image-guided spinal navigation: principles and clinical applications | |
| Sama et al. | Computerized frameless stereotactic image guidance in spinal surgery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221021 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230308 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7242537 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |