JP6956617B2 - ホルダ搬送装置 - Google Patents
ホルダ搬送装置 Download PDFInfo
- Publication number
- JP6956617B2 JP6956617B2 JP2017237709A JP2017237709A JP6956617B2 JP 6956617 B2 JP6956617 B2 JP 6956617B2 JP 2017237709 A JP2017237709 A JP 2017237709A JP 2017237709 A JP2017237709 A JP 2017237709A JP 6956617 B2 JP6956617 B2 JP 6956617B2
- Authority
- JP
- Japan
- Prior art keywords
- holder
- posture
- transport path
- forward movement
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0406—Individual bottles or tubes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/046—General conveyor features
- G01N2035/0467—Switching points ("aiguillages")
- G01N2035/047—Switching points ("aiguillages") diverging, e.g. sending carriers to different analysers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0474—Details of actuating means for conveyors or pipettes
- G01N2035/0477—Magnetic
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
Description
図1には、実施形態に係るホルダ搬送装置11を備えた検体処理システム10の構成例が示されている。検体処理システム10は、検体の分析に先立って検体を前処理するものである。検体として、生体から採取された血液、尿等が挙げられる。前処理として、遠心分離、開栓、分注、閉栓等があげられる。検体処理システム10において、検体が分析されてもよい。
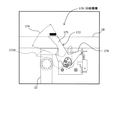
図2には、分離機構の第1例が斜視図として示されている。図示された分離機構26は、分離器42、駆動源としてのモータ44、及び、軸部材46を有する。分離器42は、搬送路18,20の上面レベルよりも若干高い位置に設けられている。モータ44は、搬送路18,20の下方(地下空間)に設けられている。軸部材46は、搬送路18の近傍に設けられた垂直軸であり、具体的には、それは搬送路18と搬送路20の間の隙間を上下方向に貫通している。モータ44で生じた回転力が軸部材46を介して分離器42に伝達される。
次に、上記分離機構と共に設置される分岐機構及び移送機構について説明する。もっとも、ホルダ搬送装置に、分離機構、分岐機構、及び、移送機構のいずれか1つ又は2つが組み込まれてもよい。
次に、図17〜図21を用いて、分離機構の第2例について説明する。この第2例においても、上記第1例と同様に、ホルダの分離のために単一の可動部材が利用されている。具体的には、以下に説明する可動板142が利用されている。
分離機構の第1例及び第2例においては、搬送路の下方に駆動源が設置されていたが、搬送機構の上方に駆動源を設置することも可能である。また、上述した各アーム作用を得られる限りにおいて、可動部材の形態を変更してもよい。例えば、各アームの長さや形状を変更してもよい。可動部材を所定のエッジを有する円板又は矩形板として構成してもよい。フロントアームとリアアームとを別部材で構成することも考えられる。あるいは、各アームを交換可能としてもよい。
実施形態に係るホルダ搬送装置は、複数の検体容器を個別搬送するための複数のホルダに対して前進運動力を与える搬送路と、搬送路の近傍に設定された垂直の回転軸を中心として回転運動する可動部材を有する分離機構と、を含む。可動部材の一方方向への回転により可動部材の第1姿勢が形成され、可動部材の他方方向への回転により可動部材の第2姿勢が形成される。可動部材はフロントアーム及びリアアームを有する。フロントアームは、第1姿勢から第2姿勢へ変化する第1過程において搬送路上から退避してn番ホルダの前進運動を許容し、第2姿勢から第1姿勢へ変化する第2過程において搬送路上に進出してn+1番ホルダの前進運動を規制する。リアアームは、フロントアームの下流側に設けられたアームであって、第1過程において搬送路上に進出してn番ホルダの前進運動を規制し、第2過程において搬送路上から退避してn番ホルダの前進運動を許容する。
Claims (9)
- 複数の検体容器を個別搬送するための複数のホルダに対して前進運動力を与える搬送路と、
前記搬送路の近傍に設定された垂直の回転軸を中心として回転運動する可動部材を有する分離機構と、
を含み、
前記可動部材の一方方向への回転により前記可動部材の第1姿勢が形成され、前記可動部材の他方方向への回転により前記可動部材の第2姿勢が形成され、
前記可動部材は、
前記第1姿勢から前記第2姿勢へ変化する第1過程において前記搬送路上から退避してn番ホルダの前進運動を許容し、前記第2姿勢から前記第1姿勢へ変化する第2過程において前記搬送路上に進出してn+1番ホルダの前進運動を規制するフロントアームと、
前記フロントアームの下流側に設けられたアームであって、前記第1過程において前記搬送路上に進出して前記n番ホルダの前進運動を規制し、前記第2過程において前記搬送路上から退避して前記n番ホルダの前進運動を許容するリアアームと、
を含み、
前記第2過程の途中において前記可動部材の中間姿勢が形成され、
前記第2姿勢から前記中間姿勢へ変化する過程において、前記フロントアームにより前記n+1番ホルダの前進運動を規制した状態が形成され、且つ、前記リアアームにより基準停止位置までの前記n番ホルダの前進運動が許容される、
ことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記リアアームは、
前記第2姿勢から前記中間姿勢へ変化する過程において、前記基準停止位置までの前記n番ホルダの前進運動を案内する直線状のガイドエッジと、
前記中間姿勢において、前記基準停止位置で前記n番ホルダを捕獲するフックと、
を含むことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記基準停止位置又はその近傍には前記n番ホルダと通信する通信器が設けられている、
ことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記可動部材の第2姿勢において前記リアアームにより前記n番ホルダが仮の停止位置に停止し、
前記リアアームは、
前記仮の停止位置から前記基準停止位置への前記n番ホルダの前進運動に際して前記n番ホルダに当接するガイドエッジと、
前記可動部材の中間姿勢において前記基準停止位置で前記n番ホルダの前進運動を規制するフックと、
を有する、ことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記フロントアームは、前記第2姿勢から前記中間姿勢へ変化する過程において前記n+1番ホルダに当たって前記n+1番ホルダの前進運動を規制するストッパエッジを有する、
ことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記搬送路よりも低い位置に設けられた駆動源と、
前記回転軸を構成し、前記駆動源で生じた回転駆動力を前記可動部材に伝達する軸部材と、
を含むことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記n番ホルダの前進運動が規制された状態において当該n番ホルダに対して回転運動力を与える回転駆動部材を含む、
ことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記搬送路上の分岐箇所に設けられた分岐機構を含み、
前記分岐機構は、前記搬送路上に進出して対象ホルダを捕獲し、前記対象ホルダを分岐搬送路へ送り出す送りアームを含む、
ことを特徴とするホルダ搬送装置。 - 請求項1記載の装置において、
前記搬送路上の移送箇所に設けられた移送機構を含み、
前記移送機構は、前記搬送路上に進出して対象ホルダを捕獲し、前記対象ホルダを他の搬送路へ送り出す送りアームを含む、
ことを特徴とするホルダ搬送装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017237709A JP6956617B2 (ja) | 2017-12-12 | 2017-12-12 | ホルダ搬送装置 |
| US16/637,379 US11255867B2 (en) | 2017-12-12 | 2018-11-08 | Holder conveying device |
| CN201880052183.8A CN111051892B (zh) | 2017-12-12 | 2018-11-08 | 支架搬运装置 |
| PCT/JP2018/041536 WO2019116796A1 (ja) | 2017-12-12 | 2018-11-08 | ホルダ搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017237709A JP6956617B2 (ja) | 2017-12-12 | 2017-12-12 | ホルダ搬送装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019105509A JP2019105509A (ja) | 2019-06-27 |
| JP2019105509A5 JP2019105509A5 (ja) | 2020-12-17 |
| JP6956617B2 true JP6956617B2 (ja) | 2021-11-02 |
Family
ID=66820273
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017237709A Active JP6956617B2 (ja) | 2017-12-12 | 2017-12-12 | ホルダ搬送装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11255867B2 (ja) |
| JP (1) | JP6956617B2 (ja) |
| CN (1) | CN111051892B (ja) |
| WO (1) | WO2019116796A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2013202805B2 (en) * | 2013-03-14 | 2015-07-16 | Gen-Probe Incorporated | System and method for extending the capabilities of a diagnostic analyzer |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5941366A (en) * | 1996-09-19 | 1999-08-24 | Labotix Automation, Inc. | Transport system for biospecimens |
| JP2000146988A (ja) * | 1998-11-18 | 2000-05-26 | Sigma Seiki Kk | 採血管搬送システム |
| JP3839441B2 (ja) * | 2004-03-22 | 2006-11-01 | 株式会社アイディエス | 試験管搬送路の搬送方向変換装置 |
| ITMI20072254A1 (it) * | 2007-11-30 | 2009-06-01 | Dachi S R L | "impianto di identificazione, trasporto ed indirizzamento automatico di campioni di materiale biologico" |
| JP2010281604A (ja) * | 2009-06-02 | 2010-12-16 | Aoi Seiki Kk | 検体処理装置及び検体処理方法 |
| JP5581033B2 (ja) | 2009-09-30 | 2014-08-27 | 株式会社日立ハイテクノロジーズ | 1本搬送用ホルダの切り離し機構 |
| JP5610206B2 (ja) * | 2010-08-26 | 2014-10-22 | 株式会社ダイフク | 分岐装置 |
| JP5923270B2 (ja) | 2011-10-07 | 2016-05-24 | 株式会社日立ハイテクノロジーズ | 検体処理システム |
| ITMI20121218A1 (it) * | 2012-07-12 | 2014-01-13 | Inpeco Ip Ltd | Stazione di accantonamento provvisorio di dispositivi di trasporto di contenitori di prodotti biologici |
| WO2016022846A1 (en) * | 2014-08-06 | 2016-02-11 | Beckman Coulter, Inc. | Disc - lane gate function for a laboratory transport system |
| CN107407690B (zh) * | 2015-03-30 | 2020-12-01 | 株式会社日立高新技术 | 检体搬运装置及检体搬运方法 |
-
2017
- 2017-12-12 JP JP2017237709A patent/JP6956617B2/ja active Active
-
2018
- 2018-11-08 WO PCT/JP2018/041536 patent/WO2019116796A1/ja active Application Filing
- 2018-11-08 CN CN201880052183.8A patent/CN111051892B/zh active Active
- 2018-11-08 US US16/637,379 patent/US11255867B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20210364539A1 (en) | 2021-11-25 |
| CN111051892A (zh) | 2020-04-21 |
| JP2019105509A (ja) | 2019-06-27 |
| CN111051892B (zh) | 2023-06-09 |
| WO2019116796A1 (ja) | 2019-06-20 |
| US11255867B2 (en) | 2022-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6743204B2 (ja) | 容器ホルダの保管および供給 | |
| EP3405794B1 (en) | Sample handling device | |
| US7233838B2 (en) | Transfer and positioning apparatus for automated conveyor system | |
| EP1106542B1 (en) | Arrangement and method for handling test tubes in a laboratory | |
| JP5232853B2 (ja) | 自動検査室システムで使用するためのプログラム制御可能なランダム・アクセス・サンプル操作装置 | |
| US9505563B2 (en) | Disc lane gate function | |
| US20140000391A1 (en) | System and method for vessel alignment | |
| US20140041750A1 (en) | System and method for high-volume filling of pharmaceutical prescriptions | |
| WO2015064540A1 (ja) | 検体移載装置及び検体処理システム | |
| EP3374772B1 (en) | Sample handling device and method for sample handling | |
| JP7139253B2 (ja) | 検体キャリア | |
| JP6956617B2 (ja) | ホルダ搬送装置 | |
| US20040267403A1 (en) | Specimen sorting system | |
| EP3041768B1 (en) | Method and arrangement for handling test tubes | |
| JP3907959B2 (ja) | 搬送ラックの停止機構 | |
| JP2009297466A (ja) | Ptpカセット及びptp払出装置 | |
| JP2017156344A (ja) | ラボラトリ診断容器キャリアを輸送する輸送デバイス | |
| CN110665827A (zh) | 壳状牙科器械的分拣系统 | |
| CN113326905B (zh) | 智能卡信息处理设备 | |
| JP2023084298A (ja) | 容器搬送装置 | |
| JP2023103799A (ja) | 収納体配置装置 | |
| PL221541B1 (pl) | Podajnik separujący elementów prostopadłościennych | |
| PL221540B1 (pl) | Podajnik separujący elementów obrotowych |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201030 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6956617 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |