JP6719334B2 - Vehicle control device and vehicle control method - Google Patents
Vehicle control device and vehicle control method Download PDFInfo
- Publication number
- JP6719334B2 JP6719334B2 JP2016164380A JP2016164380A JP6719334B2 JP 6719334 B2 JP6719334 B2 JP 6719334B2 JP 2016164380 A JP2016164380 A JP 2016164380A JP 2016164380 A JP2016164380 A JP 2016164380A JP 6719334 B2 JP6719334 B2 JP 6719334B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- back door
- vehicle control
- control device
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Description
本発明は、車両制御装置および車両制御方法に関する。 The present invention relates to a vehicle control device and a vehicle control method.
従来、車両のバックドアの開閉動作を制御する装置が種々提案されている(例えば、特許文献1参照)。上記した制御装置にあっては、車両が所定の駐車スペースに停止した場合に、バックドアの開度を所定の駐車スペースに応じて制御するようにしている。 Conventionally, various devices for controlling the opening/closing operation of a back door of a vehicle have been proposed (for example, refer to Patent Document 1). In the control device described above, when the vehicle stops in a predetermined parking space, the opening degree of the back door is controlled according to the predetermined parking space.
しかしながら、ユーザは、例えば車両を駐車スペースに停止させて降車し、バックドアを開けようとすることがあるが、その際、車両の後方に壁などの障害物があってバックドアを開放できない場合がある。かかる場合、ユーザは、再度乗車して車両を前進させて、車両後方にバックドアを開放することのできるスペースを確保した後、降車してバックドアの開閉を行っていた。 However, the user may try to open the back door by stopping the vehicle in the parking space and then opening the back door. At that time, if there is an obstacle such as a wall behind the vehicle and the back door cannot be opened. There is. In such a case, the user gets on the vehicle again and advances the vehicle to secure a space at the rear of the vehicle where the back door can be opened, and then gets off the vehicle to open and close the back door.
そして、ユーザは、バックドアを開閉した後、再度乗車して車両を後進させて元の駐車スペースに戻すようにしていた。このように、従来技術においては、駐車後にバックドアを開閉する際、ユーザが車両の乗り降りを繰り返すことがあり、ユーザにとって煩わしかった。 Then, after opening and closing the back door, the user gets in the vehicle again to move the vehicle backward and return it to the original parking space. As described above, in the related art, the user may repeatedly get in and out of the vehicle when opening and closing the back door after parking, which is annoying to the user.
本発明は、上記に鑑みてなされたものであって、駐車後においてバックドアの開閉を容易に行うことができる車両制御装置および車両制御方法を提供することを目的とする。 The present invention has been made in view of the above, and an object thereof is to provide a vehicle control device and a vehicle control method that can easily open and close a back door after parking.
上記課題を解決し、目的を達成するために、本発明の車両制御装置は、開放スペース判定部と、車両制御部とを備える。開放スペース判定部は、車両が駐車スペースに停止した状態において、前記車両の周囲に前記車両のバックドアを開放可能な開放スペースがあるか否かを判定する。車両制御部は、前記開放スペース判定部によって前記開放スペースがないと判定された場合、前記バックドアを開放可能な位置まで前記車両を移動させる。 In order to solve the above problems and achieve the object, a vehicle control device of the present invention includes an open space determination unit and a vehicle control unit. The open space determination unit determines whether or not there is an open space around the vehicle in which the back door of the vehicle can be opened when the vehicle is stopped in the parking space. When the open space determination unit determines that the open space does not exist, the vehicle control unit moves the vehicle to a position where the back door can be opened.
本発明によれば、駐車後においてバックドアの開閉を容易に行うことができる。 According to the present invention, the back door can be easily opened and closed after parking.
以下、添付図面を参照して、本願の開示する車両制御装置および車両制御方法の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。 Hereinafter, embodiments of a vehicle control device and a vehicle control method disclosed in the present application will be described in detail with reference to the accompanying drawings. The present invention is not limited to the embodiments described below.
(第1の実施形態)
<1.車両制御装置による車両制御方法の概要>
以下では先ず、第1の実施形態に係る車両制御装置による車両制御方法の概要について図1を参照して説明する。図1は、第1の実施形態に係る車両制御方法の概要を示す図である。
(First embodiment)
<1. Overview of vehicle control method by vehicle control device>
Hereinafter, first, an outline of a vehicle control method by the vehicle control device according to the first embodiment will be described with reference to FIG. FIG. 1 is a diagram showing an outline of a vehicle control method according to the first embodiment.
第1の実施形態に係る車両制御方法は、例えば車両1が備える車両制御装置10によって実行される。具体的に説明すると、図1に示すように、自動車などの車両1には、車両制御装置10が搭載される。
The vehicle control method according to the first embodiment is executed by the
また、車両1には、車両制御装置10に加え、車両1を走行させたり、操舵したりする装置も搭載される。具体的に車両1には、例えばエンジン等の駆動源70(図3参照)や、車両1を操舵するステアリング73(図3参照)なども搭載される。
In addition to the
車両制御装置10は、運転者などのユーザから、アクセルやハンドル(いずれも図示せず)等に対する運転操作がなされると、上記した駆動源70やステアリング73を制御して、車両1の挙動を制御する。なお、車両制御装置10の詳細な構成については、図3を参照して後述する。
When a user such as a driver performs a driving operation on an accelerator, a steering wheel (neither of which is shown), or the like, the
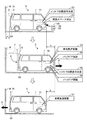
車両1の後方には、図1の上段に示すように、荷物を収容可能なトランク2が設けられる。かかるトランク2には、バックドア3が開閉可能に取り付けられる。バックドア3は、バックドア駆動部75に接続され、バックドア駆動部75によって開閉駆動される。
At the rear of the
ここで、図1の上段は、車両1が駐車スペースSに停止した状態を示している。例えば、ユーザは、車両1を駐車スペースSに停止させて降車した後に、バックドア3を開けようとすることがある。その際、車両1の後方に壁Wなどの障害物があってバックドア3を開放できない場合がある。
Here, the upper part of FIG. 1 shows a state in which the
かかる場合、従来、ユーザは再度乗車して車両1を前進させて、車両1の後方にバックドア3を開放することのできるスペースを確保して降車し、バックドア3の開閉を行い、その後車両1に乗って元の駐車スペースSに戻していた。このように、ユーザは、バックドア3を開閉するために、車両1の乗り降りを繰り返すこととなって煩わしかった。
In such a case, conventionally, the user gets on the vehicle again to move the
そこで、本実施形態に係る車両制御方法にあっては、駐車後においてバックドア3の開閉を容易に行うことができるようにした。なお、以下においては、ユーザは、車両1を駐車スペースSに停止させた後、降車して車両1の外にいることを前提として説明する。
Therefore, in the vehicle control method according to the present embodiment, the
本実施形態について詳しく説明すると、車両制御装置10には、操作部100が無線通信自在に接続される。操作部100は、例えばユーザによって携帯される電子機器であり、ユーザの操作に応じた指示信号を車両制御装置10へ出力する。
To describe this embodiment in detail, an
操作部100としては、スマートフォンなどの携帯端末装置を用いることができるが、これに限定されるものではなく、例えばタブレット端末、ウェアラブル端末、ゲーム機、PDA(Personal Digital Assistant)などその他の端末装置であってもよい。なお、操作部100は、車両1のドアの開錠等を制御する電子キーであってもよい。
Although a mobile terminal device such as a smartphone can be used as the
図2は、操作部100を模式的に示す図である。図2に示すように、ユーザがバックドア3を開閉させようとするとき、操作部100の画面101には、開ボタン102と、閉ボタン103とが表示される。
FIG. 2 is a diagram schematically showing the
開ボタン102は、ユーザによって操作されると、バックドア3の開放指示を示す開信号を車両制御装置10へ出力する。一方、閉ボタン103は、ユーザによって操作されると、バックドア3の閉鎖指示を示す閉信号を車両制御装置10へ出力する。
When operated by the user, the
なお、上記では、開ボタン102および閉ボタン103を画面101に表示させるボタンとしたが、これに限られず、ハードボタン(ハードキー)などの入力デバイスであってもよい。
In the above description, the
図1の説明に戻ると、車両1の後方には、後方センサ60が設けられる。後方センサ60は、車両1の周囲、詳しくは車両1の後方に存在する物体(ここでは壁W)までの距離Hを検出するセンサである。以下では、かかる距離Hを「離間距離H」という場合がある。後方センサ60は、検出した離間距離Hを示す信号を車両制御装置10へ出力する。
Returning to the description of FIG. 1, a
後方センサ60としては、例えば超音波を発信し、かかる超音波が物体で反射した反射波を受信することで、車両1の周囲に存在する物体までの離間距離Hを検出するソナーを用いることができる。なお、後方センサ60は、ソナーに限定されるものではなく、例えば電波を利用して離間距離Hを検出するレーダ装置や、撮像した画像を解析して離間距離Hを検出するカメラなどであってもよい。
As the
上記のように構成された車両制御装置10は、図1の上段に示すように、車両1が駐車スペースSに停止した状態において、ユーザによって操作部100の開ボタン102が操作されると、操作部100からの開信号を受信する(ステップS1)。
When the user operates the
車両制御装置10は、開信号を受信すると、後方センサ60の出力に基づき、車両1の周囲にバックドア3を開放可能な開放スペースがあるか否かを判定する(ステップS2)。詳しくは、車両制御装置10は、後方センサ60によって検出された物体までの離間距離H(ここでは車両1から壁Wまでの離間距離H)が、バックドア3を開放するのに必要な距離以上であるか否かを判定する。
Upon receiving the open signal, the
そして、車両制御装置10は、開放スペースがないと判定された場合、すなわち、離間距離Hがバックドア3を開放するのに必要な距離未満の場合、図1の中段に矢印Aで示すように、車両1を前進移動させる(ステップS3)。
Then, when it is determined that there is no open space, that is, when the separation distance H is less than the distance required to open the
詳しくは、車両制御装置10は、バックドア3を開放可能な位置となるまで車両1を移動量Xだけ移動させる。これにより、車両1の後方には、バックドア3を開放可能な開放スペースTを確保することができる。
Specifically, the
次いで、車両制御装置10は、バックドア駆動部75を制御してバックドア3を開放する(ステップS4)。なお、図1の中段では、開放されたバックドア3を破線で示している。
Next, the
続いて、ユーザは、トランク2への荷物の出し入れが完了すると、操作部100の閉ボタン103を操作する。これにより、車両制御装置10は、操作部100からの閉信号を受信する(ステップS5)。
Then, the user operates the
車両制御装置10は、閉信号を受信すると、バックドア駆動部75を制御して、バックドア3を閉鎖する(ステップS6)。続いて、車両制御装置10は、図1の下段に矢印Bで示すように、車両1を後進移動させる(ステップS7)。
When the
詳しくは、車両制御装置10は、前進させた車両1、言い換えると、バックドア3を開放可能な位置まで移動させた車両1を、移動量Xだけ移動させて駐車スペースSの元の位置に戻す。
Specifically, the
このように、本実施形態にあっては、駐車後にバックドア3を開けたい場合であっても、ユーザは車両1の乗り降りを繰り返すことなく、バックドア3の開閉を容易に行うことができる。
As described above, in the present embodiment, even if the user wants to open the
また、本実施形態にあっては、駐車後にバックドア3の開閉を容易に行うことができることから、ユーザは、バックドア3を開放するスペースを気にすることなく、駐車スペースSに駐車することができる。
Further, in this embodiment, since the
また、車両制御装置10は、前進させた車両1を、バックドア3を開閉後に後進させて駐車スペースSの元の位置に戻すことから、例えば、自身で車両1を元に戻すなどのユーザの負担をなくすことができる。
Further, the
<2.車両制御装置を含む車両等の全体構成>
次に、第1の実施形態に係る車両制御装置10を備えた車両1等の構成について、図3を用いて説明する。図3は、車両制御装置10を備えた車両1等の構成例を示すブロック図である。
<2. Overall configuration of vehicle including vehicle control device>
Next, the configuration of the
図3に示すように、車両1は、車両制御装置10に加え、バックドアスイッチ50と、シフトポジションセンサ51と、上記した後方センサ60と、前方センサ61と、右方センサ62と、左方センサ63とを備える。
As shown in FIG. 3, in addition to the
図4は、バックドアスイッチ50および各センサ51,60〜63の配置例を示す図である。図4に示すように、バックドアスイッチ50は、例えばバックドア3の取っ手3d付近に配置される。なお、バックドアスイッチ50が配置される位置は、上記に限定されるものではなく、例えばバックドア3の取っ手3dから離れた位置や車室内などその他の位置であってもよい。
FIG. 4 is a diagram showing an arrangement example of the
バックドアスイッチ50は、バックドア3が閉鎖された状態でユーザによって操作されると、操作部100の開ボタン102と同様に、バックドア3の開信号を車両制御装置10へ出力する。また、バックドアスイッチ50は、バックドア3が開放された状態でユーザによって操作されると、操作部100の閉ボタン103と同様に、バックドア3の閉信号を車両制御装置10へ出力する。
When the
なお、上記では、バックドア3の開信号および閉信号を出力する装置として、操作部100およびバックドアスイッチ50の両方を備えるようにしたが、これに限られず、操作部100およびバックドアスイッチ50のうちいずれか一方を備えるようにしてもよい。
In the above description, the
シフトポジションセンサ51は、車室内の図示しないシフトレバーに接続され、ユーザによって選択されたシフトレバーのシフト位置を検出し、検出されたシフト位置を示すシフト位置信号を車両制御装置10へ出力する。なお、シフト位置には、例えば、車両1を前進走行させるD(Drive)レンジ、後進走行させるR(Reverse)レンジ、中立レンジであるN(Neutral)レンジ、および駐車レンジであるP(Parking)レンジ等が含まれる。
The
図4に示すように、後方センサ60は車両1の後方に配置され、前方センサ61は車両1の前方に配置され、右方センサ62は車両1の右方に配置され、左方センサ63は車両1の左方に配置される。
As shown in FIG. 4, the
前方センサ61、右方センサ62および左方センサ63は、後方センサ60と同様、車両1の周囲に存在する物体までの距離を検出するセンサである。前方センサ61は車両1の前方から物体までの距離を、右方センサ62は車両1の右方から物体までの距離を、左方センサ63は車両1の左方から物体までの距離を示す信号をそれぞれ、車両制御装置10へ出力する。なお、前方センサ61、右方センサ62および左方センサ63としては、ソナーを用いることができるが、これに限定されるものではなく、レーダ装置やカメラなどであってもよい。また、「物体」は、上記した壁Wに限られず、人や隣接して駐車される車両などを含む。
Like the
図3の説明に戻ると、車両1はさらに、上記した駆動源70と、イグニッションスイッチ71と、ブレーキ72と、上記したステアリング73と、トランスミッション74と、上記したバックドア駆動部75と、スピーカ76とを備える。
Returning to the description of FIG. 3, the
駆動源70は、例えばエンジンや電動モータであり、車両1は、駆動源70から出力される駆動力によって走行する。なお、駆動源70がエンジンである場合、かかるエンジンは、エンジンの出力を電子的に制御する電子スロットルを備える。
The
イグニッションスイッチ71は、駆動源70を起動または停止させるスイッチである。ブレーキ72は、車両1を減速または停止させる制動装置である。ステアリング73は、車両1の進行方向を転換して車両1を操舵する操舵装置である。トランスミッション74は、車両1の前進、後進を切り替えるとともに、変速段の切り替えも行う。
The
バックドア駆動部75は、電動モータやギア機構などを備え、バックドア3を開閉駆動する。具体的には、バックドア駆動部75は、後述するバックドア制御部25からの駆動指示に基づき、バックドア3を所定の開度まで開放したり、バックドア3を閉鎖したりする。
The back
スピーカ76は、車両1の適宜位置に配置され、例えば、車両1の移動等が開始される旨を、ユーザを含む周囲の人に報知する音声や警告音を出力する。
The
車両制御装置10は、制御部20と、記憶部40とを備える。制御部20は、操作信号受付部21と、開放スペース判定部22と、移動経路算出部23と、車両制御部24と、バックドア制御部25と、報知制御部26とを備える。なお、制御部20は、CPUなどを備えたマイクロコンピュータであり、車両1全体を制御する。
The
また、記憶部40は、不揮発性メモリやハードディスクドライブといった記憶デバイスで構成される記憶部であり、移動量情報41を記憶する。移動量情報41には、上記した移動量Xを示す情報、詳しくは、車両1をバックドア3を開放可能な位置まで移動させるのに必要な車両1の移動量Xを示す情報が含まれている。
The
なお、上記した移動量Xは、予め設定された値とされるが、これに限定されるものではなく、例えば駐車スペースS(図1参照)における車両1の停止位置に応じて変更される値であってもよい。
The above-mentioned movement amount X is set to a preset value, but is not limited to this value, and is a value changed according to the stop position of the
すなわち、例えば、車両1から障害物たる壁W(図1参照)までの離間距離H(図1参照)が比較的短い場合、車両1の後方に開放スペースT(図1参照)を確保するには、車両1を大きく前進させることから、移動量Xは比較的大きい値とされる。他方、離間距離Hが比較的長い場合、車両1の後方に開放スペースTを確保するには、車両1を僅かに前進させれば足りることから、移動量Xは比較的小さい値とされる。このように、移動量Xは、例えば車両1から壁Wまでの離間距離Hに応じて変更される値、詳しくは、離間距離Hが長くなるにつれて小さい値となるようにしてもよい。
That is, for example, when the separation distance H (see FIG. 1) from the
操作信号受付部21は、操作部100やバックドアスイッチ50から出力される、バックドア3の開信号または閉信号を受け付ける。さらに、操作信号受付部21には、シフトポジションセンサ51から出力されるシフト位置信号が入力される。
The operation
ここで先ず、バックドア3の開信号について説明すると、操作信号受付部21は、シフト位置信号がPレンジを示す信号である場合に、操作部100等から受け付けた開信号を開放スペース判定部22へ出力する。逆に言えば、操作信号受付部21は、シフト位置信号がPレンジ以外のレンジを示す信号である場合、操作部100等から受け付けた開信号を開放スペース判定部22へ出力することを禁止する。
First, the open signal of the
これにより、操作信号受付部21は、シフト位置がPレンジで、車両1が確実に駐車(停止)した状態である場合に限って、開信号を開放スペース判定部22へ出力することとなるため、後述するバックドア3の開放を安全に行うことができる。
As a result, the operation
開放スペース判定部22には、上記したバックドア3の開信号が入力されるとともに、車両1の後方から障害物たる壁Wまでの離間距離Hを示す信号が後方センサ60から入力される。そして、開放スペース判定部22は、バックドア3の開信号が入力されると、車両1の周囲にバックドア3を開放可能な開放スペースTがあるか否かを判定する。
The open
開放スペース判定部22は、離間距離Hがバックドア3を開放するのに必要な距離以上である場合、車両1の周囲に開放スペースTがあると判定し、かかる判定結果をバックドア制御部25へ出力する。
The open
他方、開放スペース判定部22は、離間距離Hがバックドア3を開放するのに必要な距離未満である場合、車両1の周囲に開放スペースTがないと判定し、かかる判定結果を移動経路算出部23へ出力する。
On the other hand, when the separation distance H is less than the distance required to open the
移動経路算出部23は、開放スペース判定部22によって車両1の周囲に開放スペースTがないと判定された場合、記憶部40に記憶された移動量情報41の移動量Xを読み出す。移動経路算出部23は、読み出した移動量Xの分だけ車両1を前進させる移動経路を算出する。そして、移動経路算出部23は、算出した移動経路を示す信号を車両制御部24へ出力する。
When the open
車両制御部24には、移動経路を示す信号に加え、各センサ51,60〜63からの信号も入力される。車両制御部24は、移動経路を示す信号が入力されると、車両1を移動させる準備を行う。
In addition to the signal indicating the movement route, signals from the
具体的には、車両制御部24は、駆動源70が停止している場合は、イグニッションスイッチ71をオンして駆動源70を起動させる。また、車両制御部24は、シフト位置がDレンジとなるようにトランスミッション74を制御して、車両1を前進可能な状態とする。このようにして、車両制御部24は、車両1を移動させる準備を行う。
Specifically, when the
続いて、車両制御部24は、例えば各センサ60〜63から出力される、物体までの距離を示す信号に基づき、移動経路に障害物があるか否かを判定する。
Subsequently, the
車両制御部24は、移動経路に障害物があると判定した場合、車両1を停止させたままとする。他方、車両制御部24は、移動経路に障害物がないと判定した場合、例えばブレーキ72を解除したり、ステアリング73を制御するなどして、車両1を前進させる。
If the
車両制御部24は、車両1を移動量Xの分だけ前進させて開放スペースTを確保すると、車両1を停止させる。なお、このとき車両制御部24は、シフト位置がPレンジとなるようにトランスミッション74を制御する。そして、車両制御部24は、車両1が前進して停止したことを示す停止信号をバックドア制御部25へ出力する。
The
バックドア制御部25は、停止信号が入力されると、バックドア駆動部75を制御してバックドア3を開放する。なお、バックドア制御部25は、開放スペース判定部22によって車両1の周囲に開放スペースTがあると判定された場合、車両1を停止させたままバックドア駆動部75を制御してバックドア3を開放する。
When the stop signal is input, the back
報知制御部26は、車両1の前進移動開始の前や、バックドア3の開放前に、スピーカ76を制御し、車両1の前進移動が開始される旨、バックドア3が開放される旨を、ユーザを含む周囲の人に報知する音声等を出力させる。これにより、車両1の前進移動やバックドア3の開放をより安全に行うことができる。
The
続いて、バックドア3の閉信号について説明すると、開信号と同様に、操作信号受付部21は、シフト位置信号がPレンジを示す信号である場合に、操作部100等から受け付けた閉信号をバックドア制御部25へ出力する。逆に言えば、操作信号受付部21は、シフト位置信号がPレンジ以外のレンジを示す信号である場合、操作部100等から受け付けた閉信号をバックドア制御部25へ出力することを禁止する。
Next, the closing signal of the
これにより、操作信号受付部21は、シフト位置がPレンジで、車両1が確実に停止した状態である場合に限って、閉信号をバックドア制御部25へ出力することとなるため、後述するバックドア3の閉鎖を安全に行うことができる。
As a result, the operation
なお、シフト位置がPレンジ以外のときに、開信号または閉信号が操作信号受付部21に入力される場合、ユーザに対して例えば、シフト位置をPレンジにすることを促す音声をスピーカ76から出力するように構成してもよい。
When an open signal or a closed signal is input to the operation
バックドア制御部25は、閉信号が入力されると、バックドア駆動部75を制御してバックドア3を閉鎖する。そして、バックドア制御部25は、バックドア3の閉鎖が完了したことを示す閉鎖完了信号を車両制御部24へ出力する。
When the closing signal is input, the back
車両制御部24は、閉鎖完了信号が入力されると、車両1の現在位置が元の駐車位置と同じ位置であるか否かを判定する、正確には、操作部100等から開信号が入力されたときの駐車位置と同じ位置であるか否かを判定する。
When the closing completion signal is input, the
詳しくは、車両制御部24は、例えば、後方センサ60の出力から現在得られる壁Wまでの離間距離Hと、開信号が入力されて開放スペースTの有無を判定したときに得た離間距離Hとを比較する。そして、車両制御部24は、現在の離間距離Hと開放スペースTの有無を判定したときの離間距離Hとが同じまたは略同じである場合、車両1の現在位置が元の駐車位置と同じ位置であると判定する、すなわち、車両1は前進移動していないと判定する。
Specifically, for example, the
車両制御部24は、車両1の現在位置が元の駐車位置と同じ位置であると判定した場合、イグニッションスイッチ71をオフして駆動源70を停止させる。一方、車両制御部24は、車両1の現在位置が元の駐車位置と同じ位置ではないと判定した場合、車両1を元の駐車位置へ戻すようにする。
When determining that the current position of the
具体的には、移動経路算出部23は、車両制御部24によって現在位置が元の駐車位置と同じではないと判定された場合、移動量情報41の移動量Xを読み出す。移動経路算出部23は、読み出した移動量Xの分だけ車両1を後進させる移動経路を算出する。そして、移動経路算出部23は、算出した移動経路を示す信号を車両制御部24へ出力する。
Specifically, when the
車両制御部24は、移動経路を示す信号が入力されると、シフト位置がRレンジとなるようにトランスミッション74を制御して、車両1を後進可能な状態とし、車両1を移動させる準備を行う。
When the signal indicating the movement route is input, the
続いて、車両制御部24は、例えば各センサ60〜63から出力される、物体までの距離を示す信号に基づき、移動経路に障害物があるか否かを判定する。
Subsequently, the
車両制御部24は、移動経路に障害物があると判定した場合、車両1を停止させたままとする。他方、車両制御部24は、移動経路に障害物がないと判定した場合、例えばブレーキ72を解除したり、ステアリング73を制御するなどして、車両1を後進させる。
If the
車両制御部24は、車両1を移動量Xの分だけ後進させることで、車両1を元の駐車位置へ戻し、続いてイグニッションスイッチ71をオフして駆動源70を停止させる。
The
報知制御部26は、バックドア3の閉鎖前や、車両1の後進移動開始の前に、スピーカ76を制御し、バックドア3が閉鎖される旨、車両1の後進移動が開始される旨を、ユーザを含む周囲の人に報知する音声等を出力させる。これにより、車両1の後進移動やバックドア3の閉鎖をより安全に行うことができる。
The
<3.第1の実施形態に係る車両制御装置の制御処理>
次に、車両制御装置10における具体的な処置手順について図5,6を用いて説明する。図5は、車両制御装置10が実行するバックドア3の開放処理手順を示すフローチャートである。また、図6は、車両制御装置10が実行するバックドア3の閉鎖処理手順を示すフローチャートである。
<3. Control Process of Vehicle Control Device According to First Embodiment>
Next, a specific procedure of the
図5に示すように、車両制御装置10は、シフト位置がPレンジであるか否かを判定する(ステップS101)。車両制御装置10は、シフト位置がPレンジではないと判定される場合(ステップS101,No)、ステップS101の処理を繰り返す。
As shown in FIG. 5, the
一方、車両制御装置10は、シフト位置がPレンジであると判定される場合(ステップS101,Yes)、操作部100等からバックドア3の開信号を受け付けたか否かを判定する(ステップS102)。
On the other hand, when it is determined that the shift position is in the P range (Yes in step S101), the
車両制御装置10は、開信号を受け付けていないと判定される場合(ステップS102,No)、ステップS102の処理を繰り返す。車両制御装置10は、開信号を受け付けたと判定される場合(ステップS102,Yes)、車両1の周囲にバックドア3を開放可能な開放スペースTがあるか否かを判定する(ステップS103)。
If it is determined that the open signal has not been received (step S102, No), the
車両制御装置10は、開放スペースTがないと判定された場合(ステップS103,No)、移動量Xの分だけ車両1を前進させる移動経路を算出する(ステップS104)。続いて、車両制御装置10は、トランスミッション74等を制御して、車両1を前進可能な状態とし、車両1を移動させる準備を行う(ステップS105)。
When it is determined that the open space T does not exist (No in step S103), the
次いで、車両制御装置10は、車両1の前進移動が開始される旨をスピーカ76を介してユーザ等に報知する(ステップS106)。
Next, the
次いで、車両制御装置10は、移動経路に障害物があるか否かを判定する(ステップS107)。車両制御装置10は、移動経路に障害物があると判定される場合(ステップS107,Yes)、ステップS107の処理を繰り返し、車両1を停止させたままとする。
Next, the
車両制御装置10は、移動経路に障害物がないと判定される場合(ステップS107,No)、ブレーキ72等を制御して車両1を前進移動させる(ステップS108)。そして、車両制御装置10は、車両1が移動量Xの分移動したところで、車両1を停止させる。これにより、車両1の後方に開放スペースTが確保される。
When it is determined that there is no obstacle on the moving route (No in step S107), the
次いで、車両制御装置10は、バックドア3が開放される旨をスピーカ76を介してユーザ等に報知し(ステップS109)、続いてバックドア3を開放する(ステップS110)。
Next, the
他方、車両制御装置10は、開信号を受け付けた時点で、車両1の後方に既に開放スペースTがあると判定された場合(ステップS103,Yes)、ステップS109,S110に進み、バックドア3が開放される旨の報知、バックドア3の開放を行う。なお、バックドア3の開放が完了すると、ユーザはトランク2に対して荷物の出し入れを行う。
On the other hand, when the
次に、ユーザによる荷物の出し入れが終わった後に実行される、バックドア3の閉鎖処理手順を図6を参照して説明する。図6に示すように、車両制御装置10は、操作部100等からバックドア3の閉信号を受け付けたか否かを判定する(ステップS201)。
Next, the procedure for closing the
車両制御装置10は、閉信号を受け付けていないと判定される場合(ステップS201,No)、ステップS201の処理を繰り返す。車両制御装置10は、閉信号を受け付けたと判定される場合(ステップS201,Yes)、バックドア3が閉鎖される旨をスピーカ76を介してユーザ等に報知し(ステップS202)、続いてバックドア3を閉鎖する(ステップS203)。
When it is determined that the closing signal has not been received (step S201, No), the
続いて、車両制御装置10は、車両1の現在位置が元の駐車位置と同じであるか否かを判定する(ステップS204)。車両制御装置10は、車両1の現在位置が元の駐車位置と同じ位置ではないと判定された場合(ステップS204,No)、移動量Xの分だけ車両1を後進させる移動経路を算出する(ステップS205)。
Subsequently, the
続いて、車両制御装置10は、トランスミッション74等を制御して、車両1を後進可能な状態とし、車両1を移動させる準備を行う(ステップS206)。次いで、車両制御装置10は、車両1の後進移動が開始される旨をスピーカ76を介してユーザ等に報知する(ステップS207)。
Subsequently, the
次いで、車両制御装置10は、移動経路に障害物があるか否かを判定する(ステップS208)。車両制御装置10は、移動経路に障害物があると判定される場合(ステップS208,Yes)、ステップS208の処理を繰り返し、車両1を停止させたままとする。
Next, the
他方、車両制御装置10は、移動経路に障害物がないと判定される場合(ステップS208,No)、ブレーキ72等を制御して車両1を後進移動させる(ステップS209)。そして、車両制御装置10は、車両1が移動量Xの分移動したところで、車両1を停止させる。これにより、車両1を元の駐車位置に戻すことができる。
On the other hand, when it is determined that there is no obstacle on the movement route (step S208, No), the
続いて、車両制御装置10は、イグニッションスイッチ71をオフして駆動源70を停止させる(ステップS210)。なお、車両制御装置10は、車両1の現在位置が元の駐車位置と同じ位置であると判定された場合(ステップS204,Yes)、ステップS210に進んで、イグニッションスイッチ71をオフする。
Then, the
上述してきたように、第1の実施形態に係る車両制御装置10は、開放スペース判定部22と、車両制御部24とを備える。開放スペース判定部22は、車両1が駐車スペースSに停止した状態において、車両1の周囲に車両1のバックドア3を開放可能な開放スペースTがあるか否かを判定する。車両制御部24は、開放スペース判定部22によって開放スペースTがないと判定された場合、バックドア3を開放可能な位置まで車両1を移動させる。これにより、車両制御装置10にあっては、駐車後においてバックドア3の開閉を容易に行うことができる。
As described above, the
(第2の実施形態)
<4.第2の実施形態に係る車両制御装置の構成>
次いで、第2の実施形態に係る車両制御装置10の構成について図7を参照しつつ説明する。図7は、第2の実施形態に係る車両制御装置10を備えた車両1等の構成例を示すブロック図である。なお、以下においては、第1の実施形態と共通の構成については、同一の符号を付して説明を省略する。
(Second embodiment)
<4. Configuration of Vehicle Control Device According to Second Embodiment>
Next, the configuration of the
例えば、トランク2に対して出し入れされる荷物が比較的大きい場合、車両1の後方のスペースを大きく取ったり、バックドア3を開度が大きくなるように開放したりすることで、荷物の出し入れを容易にすることができる。
For example, when the luggage to be put in and taken out of the trunk 2 is relatively large, the luggage can be put in and taken out by taking a large space behind the
そこで、第2の実施形態においては、荷物の大きさに応じて車両1の移動量Xやバックドア3の開度を変更するようにした。なお、本明細書において、荷物の大きさとは、荷物の体積や長さなどを含む意味で用いる場合がある。
Therefore, in the second embodiment, the movement amount X of the
図7に示すように、車両制御装置10の制御部20はさらに、荷物検出部30と、移動量算出部31と、開度算出部32とを備える。また、記憶部40は、移動量情報41と、目標開度情報42とを記憶する。
As shown in FIG. 7, the
また、第2の実施形態において、荷物の大きさは操作部100を介して入力されるものとするが、これはあくまでも例示であって限定されるものではない。
In addition, in the second embodiment, the size of the luggage is assumed to be input via the
具体的には、図2に示すように、操作部100の画面101上において、荷物の大きさを入力する入力画面110が表示される。そして、入力画面110には、想像線で示すように、小ボタン111と、中ボタン112と、大ボタン113とが表示される。
Specifically, as shown in FIG. 2, an
小ボタン111、中ボタン112および大ボタン113は、ユーザによって荷物の大きさに応じて選択されて操作される。
The
詳しくは、小ボタン111は荷物が比較的小さい場合、中ボタン112は荷物が中程度の場合、大ボタン113は荷物が比較的大きい場合に選択されて操作される。各ボタン111,112,113は、ユーザによって操作されるとそれぞれ、荷物が小さいことを示す荷物小信号、中程度であることを示す荷物中信号、大きいことを示す荷物大信号を車両制御装置10の操作信号受付部21(図7参照)へ出力する。
Specifically, the
操作信号受付部21は、操作部100から受け付けた荷物小信号などを荷物検出部30へ出力する。そして、荷物検出部30は、操作信号受付部21から出力された荷物小信号などに基づき、トランク2に対して出し入れされる荷物の大きさを検出する。
The operation
移動量算出部31は、荷物検出部30によって検出された荷物の大きさに基づき、移動量情報41を読み出して移動量Xを算出する、正確には、バックドア3を開放可能な位置まで車両1を移動させる車両1の移動量Xを算出する。
The movement
図8は、移動量情報41を示す図である。図8に示すように、移動量情報41では、車両1の移動量Xが荷物の大きさに対応付けて設定される。具体的には、荷物が比較的小さい場合は移動量Xが短く、荷物が比較的大きい場合に移動量Xが長く設定され、荷物が中程度の場合、移動量Xは、荷物が小さい場合の移動量Xと大きい場合の移動量Xとの中間の値に設定される。すなわち、移動量Xは、荷物が大きくなるにつれて長い値となるように設定される。
FIG. 8 is a diagram showing the
これにより、例えば、トランク2に対して出し入れされる荷物が比較的大きい場合であっても、車両1の後方のスペースを大きく取ることが可能となり、荷物の出し入れを容易に行うことができる。
As a result, for example, even when the luggage to be taken in and out of the trunk 2 is relatively large, it is possible to take a large space behind the
図7の説明に戻ると、移動量算出部31は、算出された移動量Xを示す信号を移動経路算出部23へ出力する。そして、移動経路算出部23は、移動量Xの分だけ車両1を前進させる移動経路を算出し、算出した移動経路を示す信号を車両制御部24へ出力する。
Returning to the description of FIG. 7, the movement
車両制御部24は、移動経路に基づいて、言い換えると、移動量算出部31によって算出された移動量Xに基づいて車両1を移動させる。
The
開度算出部32は、荷物検出部30によって検出された荷物の大きさに基づき、目標開度情報42を読み出して目標開度αを算出する。
The opening
図9は、目標開度情報42を示す図である。図9に示すように、目標開度情報42では、バックドア3の目標開度αが荷物の大きさに対応付けて設定される。具体的には、荷物が比較的小さい場合は目標開度αが小さく、荷物が比較的大きい場合に目標開度αが大きく設定され、荷物が中程度の場合、目標開度αは、荷物が小さい場合の目標開度αと大きい場合の目標開度αとの中間の値に設定される。すなわち、目標開度αは、荷物が大きくなるにつれて大きな値となるように設定される。
FIG. 9 is a diagram showing the
図7の説明に戻ると、開度算出部32は、算出された目標開度αを示す信号をバックドア制御部25へ出力する。そして、バックドア制御部25は、バックドア3の開度が開度算出部32によって算出された目標開度αとなるようにバックドア3を制御する(開放する)。
Returning to the description of FIG. 7, the opening
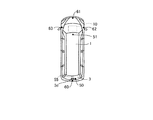
図10は、目標開度αとなるように開放されたバックドア3の一例を示す図である。図10において、バックドア3aは目標開度αが小さいときの開放状態を示し、バックドア3bは目標開度αが中間の値のとき、バックドア3cは目標開度αが大きいときの開放状態を示している。
FIG. 10 is a diagram showing an example of the
図10から分かるように、例えば、トランク2に対して出し入れされる荷物が比較的大きい場合、バックドア3cのように目標開度αを大きくすることで、トランク2(図1参照)の開口を広くすることが可能となり、よって荷物の出し入れを容易に行うことができる。
As can be seen from FIG. 10, for example, when the luggage to be put in and taken out of the trunk 2 is relatively large, the opening of the trunk 2 (see FIG. 1) is increased by increasing the target opening α like the
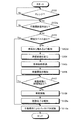
図11は、第2の実施形態に係る車両制御装置10が実行するバックドア3の開放処理手順を示すフローチャートである。
FIG. 11 is a flowchart showing a procedure for opening the
図11に示すように、車両制御装置10は、ステップS101〜S103の処理を行い、開放スペースTがないと判定された場合(ステップS103,No)、荷物の大きさを検出する(ステップS103a)。
As shown in FIG. 11, the
続いて、車両制御装置10は、荷物の大きさに基づいて車両1の移動量Xを算出する(ステップS103b)。次に、車両制御装置10は、ステップS104の処理を経た後、荷物の大きさに基づいて目標開度αを算出する(ステップS104a)。
Subsequently, the
続いて、車両制御装置10は、ステップS105〜S107の処理を行った後、ステップS108に進み、荷物の大きさに基づいて算出された移動量Xの分、車両1を前進移動させる。
Subsequently, the
そして、車両制御装置10は、ステップS109の処理を行った後、荷物の大きさに基づいて算出された目標開度αまでバックドア3を開放する(ステップS110)。
After performing the process of step S109, the
このように、第2の実施形態にあっては、荷物の大きさに応じて車両1の移動量Xやバックドア3の目標開度αを変更するようにしたので、荷物の出し入れを容易に行うことができる。
As described above, in the second embodiment, the movement amount X of the
(第3の実施形態)
<5.第3の実施形態に係る車両制御装置の構成>
次いで、第3の実施形態に係る車両制御装置10について説明する。上記した実施形態において、操作部100等から受け付けた信号に基づき、バックドア制御部25がバックドア3の開閉を制御する説明を行った。しかしながら、バックドア3はユーザによって手動で開閉される場合もある。
(Third Embodiment)
<5. Configuration of Vehicle Control Device According to Third Embodiment>
Next, the
そこで、第3の実施形態にあっては、バックドア3が手動操作される場合であっても、バックドア3の開閉を安全に行うことができる構成とした。
Therefore, in the third embodiment, the
具体的には、第3の実施形態にあっては、図4に想像線で示すように、接触センサ55がバックドア3の取っ手3dに設けられる。接触センサ55は、図3に想像線で示すように、ユーザがバックドア3の取っ手3dに接触してバックドア3を手動操作しようとした場合に、手動操作されたことを示す手動操作信号を操作信号受付部21へ出力する。なお、接触センサ55としては、静電容量式の接触センサを用いることができるが、これに限定されるものではない。
Specifically, in the third embodiment, as shown by an imaginary line in FIG. 4, the
操作信号受付部21は、開信号のときと同様、手動操作信号を開放スペース判定部22へ出力する。そして、開放スペース判定部22は、手動操作信号が入力されると、車両1の周囲に開放スペースTがあるか否かを判定する点は、従前の実施形態と同じである。
The operation
図12は、第3の実施形態に係る車両制御装置10が実行するバックドア3の開放処理手順を示すフローチャートである。
FIG. 12 is a flowchart showing a procedure for opening the
図12に示すように、車両制御装置10は、ステップS101の処理を行った後、ユーザによる手動開放操作があったか否かを判定する(ステップS102a)。車両制御装置10は、手動操作信号が入力されず、手動開放操作がないと判定される場合(ステップS102a,No)、ステップS102aの処理を繰り返す。
As shown in FIG. 12, after performing the process of step S101, the
他方、車両制御装置10は、手動操作信号が入力され、手動開放操作があったと判定される場合(ステップS102a,Yes)、ステップS103に進み、車両1の周囲に開放スペースTがあるか否かを判定する。
On the other hand, when the
車両制御装置10は、開放スペースTがないと判定された場合(ステップS103,No)、車両1を前進させる必要があるため、ユーザ等に対し、車両1から離れるように促す旨をスピーカ76を介して報知する(ステップS103d)。
If it is determined that the open space T does not exist (No in step S103), the
これにより、例えば手動開放操作を行うために車両1に近づいているユーザを、車両1から離すことが可能となり、後に行われる車両1の移動を安全に行うことができる。
Thereby, for example, a user who is approaching the
車両制御部24は、ステップS104〜ステップS108の処理を行った後、ユーザ等に対し、車両1の移動が完了した旨をスピーカ76を介して報知する(ステップS109a)。そして、ユーザの手動操作によってバックドア3を開放する(ステップS110a)。これにより、ユーザは、車両1の移動完了を容易に把握でき、よって手動操作によるバックドア3の開放を安全に行うことができる。
After performing the processing of steps S104 to S108, the
このように、第3の実施形態にあっては、バックドア3が手動操作される場合であっても、バックドア3の開閉を安全に行うことができる。
As described above, in the third embodiment, it is possible to safely open and close the
(変形例)
上記した実施形態にあっては、バックドア3を開放する際に車両1を移動量Xだけ前進させた場合、バックドア3の閉鎖後、車両1を移動量Xだけ後進させて駐車スペースSの元の位置に戻すようにした。
(Modification)
In the above-described embodiment, when the
図13A〜13Cは、変形例に係る車両制御装置10による車両制御を説明する図である。なお、図13A〜13Cは、いずれも車両1の平面図である。
13A to 13C are diagrams illustrating vehicle control by the
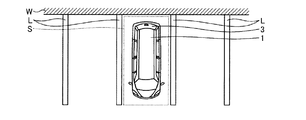
図13Aに示すように、運転者であるユーザの運転技量によっては、車両1が白線L内の駐車スペースSをはみ出して駐車される場合がある。かかる場合に、上記した実施形態の如く、車両1を移動量Xだけ前進させた後に元の位置に戻す構成とすると、車両1は駐車スペースSをはみ出した状態で戻ることとなる。
As shown in FIG. 13A, the
そこで、変形例に係る車両制御装置10にあっては、車両1を駐車スペースSに移動させて戻す際、駐車スペースSに対する車両1の位置を修正して車両1を駐車スペースSに停止させるようにした。
Therefore, in the
なお、変形例にあっては、後方センサ60、前方センサ61、右方センサ62および左方センサ63(図4参照)としては、物体との距離に加え、白線Lも検出可能となるように、カメラを用いることが好ましい。
In the modified example, the
具体的に説明すると、車両制御装置10は、バックドア3を開放する際、図13Aに矢印Cで示すように、車両1を移動量Xだけ前進させる。次いで、ユーザによる荷物の出し入れが完了すると、車両制御装置10は、バックドア3を閉鎖して車両1を元の位置に戻す。
More specifically, when the
その際、車両制御装置10は、図13Bに矢印D1で示すように、車両1を移動量Xだけ後進させるのではなく、矢印D2で示すように、検出された白線Lに基づいて車両1が駐車スペースSの中央付近に戻るような移動経路を算出して車両1を後進させる。これにより、車両1は、図13Cに示すように、白線L内の駐車スペースSの中央付近に戻ることとなる。
At that time, the
このように、変形例にあっては、バックドア3の開閉前に車両1が駐車スペースSをはみ出した状態で停止していた場合であっても、バックドア3の開閉後において、車両1を駐車スペースSの中央付近に戻すことが可能となる。
As described above, in the modified example, even when the
なお、上記した実施形態において、バックドア3を開放する際、車両1を前方へ移動させるようにしたが、これに限定されるものではない。図14は、車両1の移動方向を説明する図である。
Although the
車両制御装置10は、図14に矢印Eで示すように、例えば車両1を斜め前方へ向けて移動させるようにしてもよい。具体的には、長尺状の荷物Fをトランク2に出し入れする場合、入力画面110において、ユーザが長尺状の荷物Fに対応する操作ボタンを操作することで、車両1が駐車スペースSの白線Lと重なるように車両1を斜め前方に向けて移動させる。
The
これにより、車両1を前方へ向けて移動させる場合に比べて、車両1の後方から壁Wまでの距離を大きく取ることが可能となり、長尺状の荷物Fの出し入れを容易に行うことができる。
As a result, the distance from the rear of the
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。 Further effects and modifications can be easily derived by those skilled in the art. Therefore, the broader aspects of the present invention are not limited to the specific details and representative embodiments shown and described above. Accordingly, various modifications may be made without departing from the spirit or scope of the general inventive concept as defined by the appended claims and their equivalents.
1 車両
2 トランク
3 バックドア
10 車両制御装置
20 制御部
22 開放スペース判定部
24 車両制御部
25 バックドア制御部
26 報知制御部
40 記憶部
50 バックドアスイッチ
60 後方センサ
75 バックドア駆動部
100 操作部
DESCRIPTION OF
Claims (5)
前記開放スペース判定部によって前記開放スペースがないと判定された場合、前記バックドアを開放可能な位置まで前記車両を移動させる車両制御部と
を備え、
前記車両制御部は、
前記車両を前記駐車スペースに移動させて戻す際、前記駐車スペースに対する前記車両の位置を修正して前記車両を前記駐車スペースに停止させること
を特徴とする車両制御装置。 In a state where the vehicle is stopped in a parking space, an open space determination unit that determines whether or not there is an open space that can open the back door of the vehicle around the vehicle,
A vehicle control unit that moves the vehicle to a position at which the back door can be opened when the open space determination unit determines that there is no open space ,
The vehicle control unit,
A vehicle control device characterized in that when the vehicle is moved to the parking space and returned, the position of the vehicle with respect to the parking space is corrected and the vehicle is stopped in the parking space .
前記荷物検出部によって検出された前記荷物の大きさに基づき、前記バックドアを開放可能な位置まで前記車両を移動させる前記車両の移動量を算出する移動量算出部と
を備え、
前記車両制御部は、
前記移動量算出部によって算出された前記移動量に基づいて前記車両を移動させること
を特徴とする請求項1に記載の車両制御装置。 A luggage detection unit that detects the size of luggage that is taken in and out of the trunk to which the back door is attached,
A movement amount calculation unit that calculates a movement amount of the vehicle that moves the vehicle to a position where the back door can be opened, based on the size of the luggage detected by the luggage detection unit,
The vehicle control unit,
The vehicle control device according to claim 1, wherein the vehicle is moved based on the movement amount calculated by the movement amount calculation unit.
前記荷物検出部によって検出された前記荷物の大きさに基づき、前記バックドアの目標開度を算出する開度算出部と、
前記バックドアの開度が前記開度算出部によって算出された前記目標開度となるように前記バックドアを制御するバックドア制御部と
を備えることを特徴とする請求項1または2に記載の車両制御装置。 A luggage detection unit that detects the size of luggage that is taken in and out of the trunk to which the back door is attached,
An opening degree calculation unit that calculates a target opening degree of the back door based on the size of the luggage detected by the luggage detection unit,
The back door control unit that controls the back door so that the opening of the back door becomes the target opening calculated by the opening calculation unit. Vehicle control device.
前記バックドアを開放可能な位置まで移動させた前記車両を、前記駐車スペースに移動させて戻すこと
を特徴とする請求項1〜3のいずれか一つに記載の車両制御装置。 The vehicle control unit,
The vehicle control device according to any one of claims 1 to 3, wherein the vehicle that has moved the back door to a position where it can be opened is moved back to the parking space and returned.
前記開放スペース判定工程において前記開放スペースがないと判定された場合、前記バックドアを開放可能な位置まで前記車両を移動させる車両制御工程と
を含み、
前記車両制御工程は、
前記車両を前記駐車スペースに移動させて戻す際、前記駐車スペースに対する前記車両の位置を修正して前記車両を前記駐車スペースに停止させること
を特徴とする車両制御方法。 In a state where the vehicle is stopped in the parking space, an open space determination step of determining whether or not there is an open space that can open the back door of the vehicle around the vehicle,
The open space determined when it is determined that there is no said open space in the process, see contains a vehicle control step of moving the vehicle to the back door to openable position,
The vehicle control step,
A vehicle control method comprising: when moving the vehicle to the parking space and returning the vehicle, correcting the position of the vehicle with respect to the parking space and stopping the vehicle in the parking space .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016164380A JP6719334B2 (en) | 2016-08-25 | 2016-08-25 | Vehicle control device and vehicle control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016164380A JP6719334B2 (en) | 2016-08-25 | 2016-08-25 | Vehicle control device and vehicle control method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018030468A JP2018030468A (en) | 2018-03-01 |
| JP2018030468A5 JP2018030468A5 (en) | 2019-06-06 |
| JP6719334B2 true JP6719334B2 (en) | 2020-07-08 |
Family
ID=61304551
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016164380A Active JP6719334B2 (en) | 2016-08-25 | 2016-08-25 | Vehicle control device and vehicle control method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6719334B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018079841A (en) * | 2016-11-17 | 2018-05-24 | 三菱自動車工業株式会社 | Automatic operation system |
| CN111364872B (en) * | 2018-12-26 | 2022-08-26 | 博泰车联网科技(上海)股份有限公司 | Vehicle trunk control method, vehicle machine and vehicle |
| JP7367634B2 (en) * | 2020-08-06 | 2023-10-24 | トヨタ自動車株式会社 | Control device, program and control method |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11105686A (en) * | 1997-10-07 | 1999-04-20 | Nissan Motor Co Ltd | Automatic parking device |
| DE10229815B4 (en) * | 2002-06-28 | 2006-12-14 | Bos Gmbh & Co. Kg | Vehicle compartment protection system |
| JP5218578B2 (en) * | 2011-02-14 | 2013-06-26 | トヨタ自動車株式会社 | Parking assistance device |
| JP2015020495A (en) * | 2013-07-17 | 2015-02-02 | 日産自動車株式会社 | Vehicle drive device |
-
2016
- 2016-08-25 JP JP2016164380A patent/JP6719334B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018030468A (en) | 2018-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108350716B (en) | System and method for opening and closing a vehicle door | |
| JP5309515B2 (en) | Vehicle door opening / closing control device | |
| US9731714B2 (en) | Vehicle apparatus | |
| JP5643129B2 (en) | Vehicle door control device | |
| JP5187369B2 (en) | Reverse parking assist device for vehicle and program for reverse parking assist device | |
| JP6393537B2 (en) | Vehicle apparatus, vehicle control system, and vehicle control method | |
| JP5704178B2 (en) | Vehicle control device | |
| JP6172086B2 (en) | Vehicle control device | |
| JP6719334B2 (en) | Vehicle control device and vehicle control method | |
| CN110281887B (en) | Parking assist apparatus | |
| JP4816512B2 (en) | Driving assistance device | |
| JP2007131252A (en) | On-vehicle camera control device and on-vehicle confirmation camera device | |
| US9598008B2 (en) | Phone left in bin notification system and method | |
| JP6177024B2 (en) | Imaging device, sliding door control system, and moving body | |
| JP2016107897A (en) | On-vehicle device | |
| JP2017020275A (en) | Door lock controller | |
| JP4075651B2 (en) | Parking assistance system | |
| JP6767443B2 (en) | Parking control devices, parking control methods, vehicles and programs | |
| JP2018090070A (en) | Vehicle with automatic travel function | |
| JP3888179B2 (en) | Vehicle with parking assist device | |
| WO2023166727A1 (en) | Control device, control method, and control program | |
| JP6528828B1 (en) | Vehicle control device | |
| GB2576482A (en) | Apparatus and method for controlling vehicle movement | |
| JP7259388B2 (en) | PARKING ASSIST DEVICE, PARKING ASSIST METHOD | |
| JP7009336B2 (en) | Parking control device and parking control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190425 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190425 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200519 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200616 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6719334 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |