JP6623167B2 - ディスクの係合を確認するためのシステム及び方法 - Google Patents
ディスクの係合を確認するためのシステム及び方法 Download PDFInfo
- Publication number
- JP6623167B2 JP6623167B2 JP2016557611A JP2016557611A JP6623167B2 JP 6623167 B2 JP6623167 B2 JP 6623167B2 JP 2016557611 A JP2016557611 A JP 2016557611A JP 2016557611 A JP2016557611 A JP 2016557611A JP 6623167 B2 JP6623167 B2 JP 6623167B2
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- drive
- disk
- input
- engagement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 52
- 230000033001 locomotion Effects 0.000 claims description 50
- 230000008878 coupling Effects 0.000 claims description 21
- 238000010168 coupling process Methods 0.000 claims description 21
- 238000005859 coupling reaction Methods 0.000 claims description 21
- 238000013507 mapping Methods 0.000 claims description 8
- 230000007246 mechanism Effects 0.000 description 31
- 230000005540 biological transmission Effects 0.000 description 15
- 230000008859 change Effects 0.000 description 12
- 238000003384 imaging method Methods 0.000 description 11
- 230000007935 neutral effect Effects 0.000 description 11
- 230000008569 process Effects 0.000 description 11
- 230000001954 sterilising effect Effects 0.000 description 10
- 238000004659 sterilization and disinfection Methods 0.000 description 10
- 210000003857 wrist joint Anatomy 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000001356 surgical procedure Methods 0.000 description 8
- 239000011159 matrix material Substances 0.000 description 7
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000013459 approach Methods 0.000 description 4
- 230000036544 posture Effects 0.000 description 4
- 238000012795 verification Methods 0.000 description 4
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000008447 perception Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 238000002405 diagnostic procedure Methods 0.000 description 2
- CNQCVBJFEGMYDW-UHFFFAOYSA-N lawrencium atom Chemical compound [Lr] CNQCVBJFEGMYDW-UHFFFAOYSA-N 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000002651 drug therapy Methods 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
Images
























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
- A61B2017/00464—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable for use with different instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/066—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring torque
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
- A61B2090/0812—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument indicating loosening or shifting of parts of an instrument, signaling maladjustment of parts
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Endoscopes (AREA)
Description
この特許出願は、2014年3月17日に出願された”Systems and Methods for Confirming Disc Engagement”という標題の米国仮特許出願第61/954,408号、2015年1月15日に出願された”Coupler to Transfer Motion to Surgical Instrument From Teleoperated Actuator”という標題の米国仮特許出願第62/103,991号、及び2014年3月17日に出願された”Coupler to Transfer Motion to Surgical Instrument From Servo Actuator”という標題の米国仮特許出願第61/954,571号をについて優先権及びこれら出願の出願日の利益を主張するものであり、これら文献は、その全体が参照により本明細書に組み込まれる。
一実施形態では、この方法は、駆動入力部に隣接する入力係合部を受け取るステップを含み、駆動入力部は、作動要素によって駆動され、入力係合部は、関節出力部に結合され、関節出力部は、移動体に接続される。この方法は、作動要素による抵抗トルクを受けるまで、作動要素を回転させるステップと、抵抗トルクに基づいて、駆動入力部が入力係合部と係合したか否かを判定するステップとをさらに含む。
・変速機108の変速比(GR)(アクチュエータ106の位置の変化で除算した駆動ディスク110の位置の変化);
・器具ディスク102と関節出力部104との間の変速比(DR)(器具ディスク102の位置の変化で除算した関節出力部104の位置の変化);
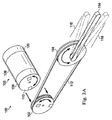
・関節出力部104の位置がノミナル位置にあり、操作可能な対象物114が中立位置にあるときの、器具ディスク102の位置であるディスクオフセット(Doff):例えば、関節出力部104によって、操作可能な対象物114のピッチを操作している場合に、中立位置は、図2Aに示した水平位置である;
・結合位置を繰り返す間の期間(Pdrive-coup):例えば、一回転当たり一度だけ(例えば、駆動ディスクと)係合する回転式結合部(例えば、器具ディスク)は、2πラジアンのPdrive-coupを有する:回転式結合部は、入力された回転当たり2回係合する場合に、Pdrive-coup=πラジアンである;
・位置を含む上側の物理的制約部116(qout_ul)と下側の物理的制約部118(qout_ll)とによって拘束される関節出力部の位置(qout);を含む。
・駆動ディスク110の位置:dsens=GR×msens、ここで、msensは、アクチュエータ106の感知された位置である;
・駆動ディスク110と関節出力部qoutにおける操作可能な対象物114との間の正確なマッピングを形成するために駆動ディスク110の位置に適用されるオフセット:dcoup_offset=Doff+n×Pdrive−coup、ここで、nは、正又は負の整数である;
・器具ディスク102の位置:dcoup=dsens+dcoup_offset;
・関節出力部104の位置:qout=DR×dcoup;を含む。
・j番目の変速機の変速比(GRj)(アクチュエータ位置の変化で除算した駆動ディスク位置の変化);
・j番目の器具ディスクとi番目の関節出力部と間の変速比(DRij)(器具ディスク位置の変化で除算した関節出力位置の変化);
・全ての関節出力部が複数の自由度内の中立位置にあるときの、j番目器具ディスクの位置であるディスクオフセット(Doffj);
・j番目のインターフェイスの結合位置を繰り返す間の期間(Pdrive-coupj);
・位置を含む上側の物理的制約部176(qout_ulj)及び下側の物理的制約部178(qout_llj)によって制約されるi番目の関節出力部の位置(qouti);を含む。

・j番目の駆動ディスクの位置:dsensj=GRj×msensj、ここで、msensjは、j番目のアクチュエータの感知された位置である;
・j番目の駆動ディスクと関節出力部qoutとの間の正確なマッピングを形成するために、j番目の駆動ディスクの位置に適用されるオフセット:dcoup_offsetj=Doffj+kj×Pdrive−coupj、ここで、kj=正又は負の整数である;
・j番目の器具ディスクの位置:dcoupj=dsensj+dcoup_offsetj;
・i番目の関節出力部の位置:[qout](i番目の関節出力部のm×1行列)=CDR×[dcoupj](j番目の器具ディスクのn×1行列);を含む。
Claims (16)
- 方法であって、当該方法は、
駆動入力部に隣接する入力係合部を受け取るステップであって、前記駆動入力部は、作動要素によって駆動され、前記入力係合部は、関節出力部に結合され、該関節出力部は、移動体に接続される、受け取るステップと、
前記作動要素が抵抗トルクを受けるまで、前記作動要素を回転させるステップと、
前記抵抗トルクに基づいて、前記駆動入力部が前記入力係合部と係合したか否かを判定するステップと、
前記駆動入力部が前記入力係合部と係合する際の前記作動要素の角度位置を決定するステップと、を含む、
方法。 - 前記駆動入力部が前記入力係合部と係合したか否かを判定するステップは、前記抵抗トルクがトルク閾値を超えているか否かを判定するステップを含む、請求項1に記載の方法。
- 前記駆動入力部が前記入力係合部と係合したか否かを判定するステップは、ボスがポケット内に配置されていることを判定するステップを含む、請求項1又は2に記載の方法。
- 前記抵抗トルクを受けるまで、前記作動要素を回転させるステップは、前記移動体が物理的な制限部に遭遇したときに前記抵抗トルクを受けるステップを含む、請求項1乃至3のいずれか一項に記載の方法。
- 前記駆動入力部が前記入力係合部と係合したか否かを判定するステップは、前記移動体がロール運動で移動したか否かを判定するステップ、又は前記移動体がヨー運動で移動したか否かを判定するステップ、又は前記移動体がピッチ運動で移動したか否かを判定するステップを含む、請求項1乃至4のいずれか一項に記載の方法。
- 前記駆動入力部が前記入力係合部と係合したか否かを判定するステップは、前記移動体の2つの関節接合した部品が移動して閉じた構成になったか否かを判定するステップを含む、請求項1乃至4のいずれか一項に記載の方法。
- システムであって、当該システムは、
医療器具を支持するように構成された器具キャリッジであって、前記医療器具は、作動可能な器具チップ及び該作動可能な器具チップを移動させるように構成された入力係合部を含み、前記器具キャリッジは、前記入力係合部と係合するように構成された駆動結合部、及び該駆動結合部を回転させるように結合されたモータを含む、器具キャリッジと、
制御システムと、を有しており、
該制御システムは、
命令された運動軌道を完了する又は前記モータが抵抗トルクを受けるまで、前記モータを回転させ、
前記抵抗トルクの大きさに基づいて、前記駆動結合部が前記入力係合部と係合したか否かを判定し、且つ
前記駆動結合部が前記入力係合部と係合する際の前記モータの角度位置を決定する、ように構成される、
システム。 - 前記駆動結合部が前記入力係合部と係合したか否かを判定することは、前記抵抗トルクの大きさがトルク閾値を超えているか否かを判定することを含む、請求項7に記載のシステム。
- 前記駆動結合部が前記入力係合部と係合したか否かを判定することは、ボスがポケット内に配置されていることを判定することを含む、請求項7又は8に記載のシステム。
- 前記抵抗トルクを受けるまで、前記モータを回転させることは、前記作動可能な器具チップが物理的な制限部に遭遇したときに前記抵抗トルクを受けることを含む、請求項7乃至9のいずれか一項に記載のシステム。
- 前記物理的な制限部は、前記入力係合部が遭遇する回転停止体である、請求項10に記載のシステム。
- 前記駆動結合部が前記入力係合部と係合したか否かを判定することは、前記作動可能な器具チップがロール運動で移動したか否かを判定することを含む、請求項7乃至11のいずれか一項に記載のシステム。
- 前記駆動結合部が前記入力係合部と係合したか否かを判定することは、前記作動可能な器具チップがヨー運動で移動したか否かを判定すること、又は前記作動可能な器具チップがピッチ運動で移動したか否かを判定することを含む、請求項7乃至12のいずれか一項に記載のシステム。
- 前記駆動結合部が前記入力係合部と係合したか否かを判定することは、前記作動可能な器具チップの2つの関節接合した部品が移動して閉じた構成になったか否かを判定することを含む、請求項7乃至13のいずれか一項に記載のシステム。
- 前記駆動結合部は、アダプタの回転可能なディスクを含む、請求項7乃至14のいずれか一項に記載のシステム。
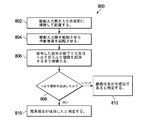
- 器具の係合を確認するための方法であって、当該方法は、
複数の駆動ディスクに隣接する複数の器具ディスクを受け取るステップであって、前記複数の器具ディスクのうちの少なくとも2つは、器具チップをある自由度に沿って移動させるように協働する、受け取るステップと、
前記複数の駆動ディスクに接続された作動要素を用いて、前記複数の駆動ディスクの動作が停止するまで、前記複数の駆動ディスクを駆動するステップと、
前記複数の駆動ディスクのそれぞれが受けるトルク抵抗を決定するステップと、
前記トルク抵抗に基づいて、前記複数の駆動ディスクの係合が成功したか否かを判定するステップと、
前記作動要素の位置を前記器具チップの位置にマッピングするステップと、を含む、
方法。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461954571P | 2014-03-17 | 2014-03-17 | |
| US201461954408P | 2014-03-17 | 2014-03-17 | |
| US61/954,408 | 2014-03-17 | ||
| US61/954,571 | 2014-03-17 | ||
| US201562103991P | 2015-01-15 | 2015-01-15 | |
| US62/103,991 | 2015-01-15 | ||
| PCT/US2015/021111 WO2015142958A1 (en) | 2014-03-17 | 2015-03-17 | Systems and methods for confirming disc engagement |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019185819A Division JP6858234B2 (ja) | 2014-03-17 | 2019-10-09 | ディスクの係合を確認するためのシステム及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017512548A JP2017512548A (ja) | 2017-05-25 |
| JP2017512548A5 JP2017512548A5 (ja) | 2018-04-26 |
| JP6623167B2 true JP6623167B2 (ja) | 2019-12-18 |
Family
ID=54145249
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016557611A Active JP6623167B2 (ja) | 2014-03-17 | 2015-03-17 | ディスクの係合を確認するためのシステム及び方法 |
| JP2019185819A Active JP6858234B2 (ja) | 2014-03-17 | 2019-10-09 | ディスクの係合を確認するためのシステム及び方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019185819A Active JP6858234B2 (ja) | 2014-03-17 | 2019-10-09 | ディスクの係合を確認するためのシステム及び方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10595836B2 (ja) |
| EP (3) | EP4331526A2 (ja) |
| JP (2) | JP6623167B2 (ja) |
| KR (2) | KR102437468B1 (ja) |
| CN (2) | CN110882058B (ja) |
| WO (1) | WO2015142958A1 (ja) |
Families Citing this family (278)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US11890012B2 (en) | 2004-07-28 | 2024-02-06 | Cilag Gmbh International | Staple cartridge comprising cartridge body and attached support |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US8991676B2 (en) | 2007-03-15 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Surgical staple having a slidable crown |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US8628518B2 (en) | 2005-12-30 | 2014-01-14 | Intuitive Surgical Operations, Inc. | Wireless force sensor on a distal portion of a surgical instrument and method |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US11278279B2 (en) | 2006-01-31 | 2022-03-22 | Cilag Gmbh International | Surgical instrument assembly |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US7753904B2 (en) | 2006-01-31 | 2010-07-13 | Ethicon Endo-Surgery, Inc. | Endoscopic surgical instrument with a handle that can articulate with respect to the shaft |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US8652120B2 (en) | 2007-01-10 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between control unit and sensor transponders |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US11291441B2 (en) | 2007-01-10 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with wireless communication between control unit and remote sensor |
| US8540128B2 (en) | 2007-01-11 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with a curved end effector |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11564682B2 (en) | 2007-06-04 | 2023-01-31 | Cilag Gmbh International | Surgical stapler device |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| RU2493788C2 (ru) | 2008-02-14 | 2013-09-27 | Этикон Эндо-Серджери, Инк. | Хирургический режущий и крепежный инструмент, имеющий радиочастотные электроды |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US11298125B2 (en) | 2010-09-30 | 2022-04-12 | Cilag Gmbh International | Tissue stapler having a thickness compensator |
| US9168038B2 (en) | 2010-09-30 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a tissue thickness compensator |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9211120B2 (en) | 2011-04-29 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a plurality of medicaments |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9282962B2 (en) | 2010-09-30 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Adhesive film laminate |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| MX358135B (es) | 2012-03-28 | 2018-08-06 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende una pluralidad de capas. |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| US9282974B2 (en) | 2012-06-28 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Empty clip cartridge lockout |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| BR112014032776B1 (pt) | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US9364230B2 (en) | 2012-06-28 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with rotary joint assemblies |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| US9629629B2 (en) | 2013-03-14 | 2017-04-25 | Ethicon Endo-Surgey, LLC | Control systems for surgical instruments |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9826976B2 (en) | 2013-04-16 | 2017-11-28 | Ethicon Llc | Motor driven surgical instruments with lockable dual drive shafts |
| CN108784838B (zh) | 2013-08-15 | 2021-06-08 | 直观外科手术操作公司 | 器械无菌适配器驱动接口 |
| KR102313240B1 (ko) * | 2013-08-15 | 2021-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 로봇 기구 피동 요소 |
| CN109247987B (zh) | 2013-08-15 | 2021-07-23 | 直观外科手术操作公司 | 预加载外科手术器械接口 |
| JP6513670B2 (ja) | 2013-08-15 | 2019-05-15 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 器具減菌アダプタ駆動構成 |
| US9445813B2 (en) | 2013-08-23 | 2016-09-20 | Ethicon Endo-Surgery, Llc | Closure indicator systems for surgical instruments |
| BR112016003329B1 (pt) | 2013-08-23 | 2021-12-21 | Ethicon Endo-Surgery, Llc | Instrumento cirúrgico |
| WO2015142788A1 (en) | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Method for engaging surgical instrument with teleoperated actuator |
| US9826977B2 (en) | 2014-03-26 | 2017-11-28 | Ethicon Llc | Sterilization verification circuit |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| JP6612256B2 (ja) | 2014-04-16 | 2019-11-27 | エシコン エルエルシー | 不均一な締結具を備える締結具カートリッジ |
| US20150297222A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| US9737301B2 (en) | 2014-09-05 | 2017-08-22 | Ethicon Llc | Monitoring device degradation based on component evaluation |
| US11311294B2 (en) | 2014-09-05 | 2022-04-26 | Cilag Gmbh International | Powered medical device including measurement of closure state of jaws |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US9844376B2 (en) | 2014-11-06 | 2017-12-19 | Ethicon Llc | Staple cartridge comprising a releasable adjunct material |
| US10736636B2 (en) | 2014-12-10 | 2020-08-11 | Ethicon Llc | Articulatable surgical instrument system |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| MX2017008108A (es) | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumento quirurgico con un yunque que puede moverse de manera selectiva sobre un eje discreto no movil con relacion a un cartucho de grapas. |
| US9968355B2 (en) | 2014-12-18 | 2018-05-15 | Ethicon Llc | Surgical instruments with articulatable end effectors and improved firing beam support arrangements |
| US9844375B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Drive arrangements for articulatable surgical instruments |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| US10052044B2 (en) | 2015-03-06 | 2018-08-21 | Ethicon Llc | Time dependent evaluation of sensor data to determine stability, creep, and viscoelastic elements of measures |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US10433844B2 (en) | 2015-03-31 | 2019-10-08 | Ethicon Llc | Surgical instrument with selectively disengageable threaded drive systems |
| KR102493816B1 (ko) * | 2015-06-11 | 2023-02-01 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 기구 맞물림을 위한 시스템 및 방법 |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10736633B2 (en) | 2015-09-30 | 2020-08-11 | Ethicon Llc | Compressible adjunct with looping members |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| CN108882932B (zh) | 2016-02-09 | 2021-07-23 | 伊西康有限责任公司 | 具有非对称关节运动构造的外科器械 |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US11224426B2 (en) | 2016-02-12 | 2022-01-18 | Cilag Gmbh International | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10492783B2 (en) | 2016-04-15 | 2019-12-03 | Ethicon, Llc | Surgical instrument with improved stop/start control during a firing motion |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US11317917B2 (en) | 2016-04-18 | 2022-05-03 | Cilag Gmbh International | Surgical stapling system comprising a lockable firing assembly |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10433840B2 (en) | 2016-04-18 | 2019-10-08 | Ethicon Llc | Surgical instrument comprising a replaceable cartridge jaw |
| WO2018013187A1 (en) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Instrument release |
| CN110099619B (zh) | 2016-12-21 | 2022-07-15 | 爱惜康有限责任公司 | 用于外科端部执行器和可替换工具组件的闭锁装置 |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| US11419606B2 (en) * | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| US10736629B2 (en) | 2016-12-21 | 2020-08-11 | Ethicon Llc | Surgical tool assemblies with clutching arrangements for shifting between closure systems with closure stroke reduction features and articulation and firing systems |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10973516B2 (en) | 2016-12-21 | 2021-04-13 | Ethicon Llc | Surgical end effectors and adaptable firing members therefor |
| US10835245B2 (en) | 2016-12-21 | 2020-11-17 | Ethicon Llc | Method for attaching a shaft assembly to a surgical instrument and, alternatively, to a surgical robot |
| US11191540B2 (en) | 2016-12-21 | 2021-12-07 | Cilag Gmbh International | Protective cover arrangements for a joint interface between a movable jaw and actuator shaft of a surgical instrument |
| JP6811676B2 (ja) * | 2017-05-01 | 2021-01-13 | 株式会社メディカロイド | 駆動部材、駆動機構、および駆動機構の製造方法 |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US11382638B2 (en) | 2017-06-20 | 2022-07-12 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured time over a specified displacement distance |
| US11324503B2 (en) | 2017-06-27 | 2022-05-10 | Cilag Gmbh International | Surgical firing member arrangements |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US20190000459A1 (en) | 2017-06-28 | 2019-01-03 | Ethicon Llc | Surgical instruments with jaws constrained to pivot about an axis upon contact with a closure member that is parked in close proximity to the pivot axis |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| US11678880B2 (en) | 2017-06-28 | 2023-06-20 | Cilag Gmbh International | Surgical instrument comprising a shaft including a housing arrangement |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US11304695B2 (en) | 2017-08-03 | 2022-04-19 | Cilag Gmbh International | Surgical system shaft interconnection |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10675107B2 (en) | 2017-11-15 | 2020-06-09 | Intuitive Surgical Operations, Inc. | Surgical instrument end effector with integral FBG |
| EP3723651A4 (en) | 2017-12-14 | 2021-09-22 | Intuitive Surgical Operations, Inc. | MEDICAL TOOLS WITH DRAWBARS |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US10835330B2 (en) | 2017-12-19 | 2020-11-17 | Ethicon Llc | Method for determining the position of a rotatable jaw of a surgical instrument attachment assembly |
| US20190192148A1 (en) | 2017-12-21 | 2019-06-27 | Ethicon Llc | Stapling instrument comprising a tissue drive |
| US11311290B2 (en) | 2017-12-21 | 2022-04-26 | Cilag Gmbh International | Surgical instrument comprising an end effector dampener |
| US11071441B2 (en) * | 2018-04-20 | 2021-07-27 | Verb Surgical Inc. | Surgical robotic tool multi-motor actuator and controller |
| US11980504B2 (en) | 2018-05-25 | 2024-05-14 | Intuitive Surgical Operations, Inc. | Fiber Bragg grating end effector force sensor |
| US11406457B2 (en) | 2018-08-20 | 2022-08-09 | Verb Surgical Inc. | Method and system for engagement of a surgical tool with actuators of a tool drive in a surgical robotic system |
| US11324501B2 (en) | 2018-08-20 | 2022-05-10 | Cilag Gmbh International | Surgical stapling devices with improved closure members |
| US11759269B2 (en) | 2018-08-20 | 2023-09-19 | Verb Surgical Inc. | Engagement and/or homing of a surgical tool in a surgical robotic system |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| CN110859671B (zh) * | 2018-08-28 | 2023-03-14 | 美好罗伯特有限公司 | 适配器以及经由适配器将手术器具安装于机械臂的方法 |
| JP6821735B2 (ja) * | 2018-08-28 | 2021-01-27 | 株式会社メディカロイド | アダプタ |
| KR20210073542A (ko) * | 2018-09-28 | 2021-06-18 | 아우리스 헬스, 인코포레이티드 | 의료 기구를 도킹시키기 위한 시스템 및 방법 |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| EP3714800A1 (en) | 2019-03-28 | 2020-09-30 | Medicaroid Corporation | Method of fixing surgical instrument to robot arm |
| US11426251B2 (en) | 2019-04-30 | 2022-08-30 | Cilag Gmbh International | Articulation directional lights on a surgical instrument |
| US11471157B2 (en) | 2019-04-30 | 2022-10-18 | Cilag Gmbh International | Articulation control mapping for a surgical instrument |
| US11253254B2 (en) | 2019-04-30 | 2022-02-22 | Cilag Gmbh International | Shaft rotation actuator on a surgical instrument |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11432816B2 (en) | 2019-04-30 | 2022-09-06 | Cilag Gmbh International | Articulation pin for a surgical instrument |
| US11452528B2 (en) | 2019-04-30 | 2022-09-27 | Cilag Gmbh International | Articulation actuators for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11426167B2 (en) | 2019-06-28 | 2022-08-30 | Cilag Gmbh International | Mechanisms for proper anvil attachment surgical stapling head assembly |
| US11399837B2 (en) | 2019-06-28 | 2022-08-02 | Cilag Gmbh International | Mechanisms for motor control adjustments of a motorized surgical instrument |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11361176B2 (en) | 2019-06-28 | 2022-06-14 | Cilag Gmbh International | Surgical RFID assemblies for compatibility detection |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11291451B2 (en) | 2019-06-28 | 2022-04-05 | Cilag Gmbh International | Surgical instrument with battery compatibility verification functionality |
| US11376098B2 (en) | 2019-06-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument system comprising an RFID system |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11298127B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Interational | Surgical stapling system having a lockout mechanism for an incompatible cartridge |
| US11298132B2 (en) | 2019-06-28 | 2022-04-12 | Cilag GmbH Inlernational | Staple cartridge including a honeycomb extension |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11853835B2 (en) | 2019-06-28 | 2023-12-26 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11547511B2 (en) | 2019-08-15 | 2023-01-10 | Verb Surgical Inc. | Joint calibration for surgical tool |
| CN112957128B (zh) | 2019-08-30 | 2022-07-01 | 上海微创医疗机器人(集团)股份有限公司 | 传动、驱动、无菌、器械盒组件与手术器械系统、机器人 |
| WO2021080623A1 (en) * | 2019-10-23 | 2021-04-29 | Verb Surgical, Inc. | Engagement and/or homing of a surgical tool in a surigical robotic system |
| US11304696B2 (en) | 2019-12-19 | 2022-04-19 | Cilag Gmbh International | Surgical instrument comprising a powered articulation system |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11291447B2 (en) | 2019-12-19 | 2022-04-05 | Cilag Gmbh International | Stapling instrument comprising independent jaw closing and staple firing systems |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| USD966512S1 (en) | 2020-06-02 | 2022-10-11 | Cilag Gmbh International | Staple cartridge |
| USD975278S1 (en) | 2020-06-02 | 2023-01-10 | Cilag Gmbh International | Staple cartridge |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD967421S1 (en) | 2020-06-02 | 2022-10-18 | Cilag Gmbh International | Staple cartridge |
| US11871925B2 (en) | 2020-07-28 | 2024-01-16 | Cilag Gmbh International | Surgical instruments with dual spherical articulation joint arrangements |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| US11452526B2 (en) | 2020-10-29 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising a staged voltage regulation start-up system |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US20220378425A1 (en) | 2021-05-28 | 2022-12-01 | Cilag Gmbh International | Stapling instrument comprising a control system that controls a firing stroke length |
| US20230046044A1 (en) * | 2021-08-09 | 2023-02-16 | Verb Surgical Inc. | Evaluation of calibration for surgical tool |
| CN113729941B (zh) * | 2021-09-23 | 2024-01-30 | 上海卓昕医疗科技有限公司 | 基于vr的手术辅助定位系统及其控制方法 |
| US11877745B2 (en) | 2021-10-18 | 2024-01-23 | Cilag Gmbh International | Surgical stapling assembly having longitudinally-repeating staple leg clusters |
| US11957337B2 (en) | 2021-10-18 | 2024-04-16 | Cilag Gmbh International | Surgical stapling assembly with offset ramped drive surfaces |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
| CN114052919A (zh) * | 2021-11-18 | 2022-02-18 | 武汉联影智融医疗科技有限公司 | 动力连接装置、末端执行设备及腹腔镜机器人 |
| WO2023165389A1 (zh) * | 2022-03-04 | 2023-09-07 | 深圳市精锋医疗科技股份有限公司 | 动力装置、手术机器人及接合方法 |
Family Cites Families (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4542272A (en) | 1982-09-28 | 1985-09-17 | The Cross Company | Induction heating device with electronic positioning control |
| CH681753A5 (ja) | 1991-03-05 | 1993-05-14 | Olten Ag Elektro Apparatebau | |
| JP3306108B2 (ja) | 1992-08-21 | 2002-07-24 | 宇宙開発事業団 | 軸継手機構 |
| US5469863A (en) | 1993-08-11 | 1995-11-28 | Polygenex International, Inc. | Polyurethane condom of welded polyurethane film |
| US5405344A (en) * | 1993-09-30 | 1995-04-11 | Ethicon, Inc. | Articulable socket joint assembly for an endoscopic instrument for surgical fastner track therefor |
| US5814038A (en) | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| JP4416840B2 (ja) * | 1995-06-07 | 2010-02-17 | エスアールアイ インターナショナル | 遠隔操縦ロボットシステム用の外科手術マニピュレーター |
| US5803086A (en) | 1996-05-16 | 1998-09-08 | Minnesota Mining And Manufacturing Company | Linerless surgical incise drape |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US8529582B2 (en) | 1996-12-12 | 2013-09-10 | Intuitive Surgical Operations, Inc. | Instrument interface of a robotic surgical system |
| US7699855B2 (en) | 1996-12-12 | 2010-04-20 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| US8206406B2 (en) | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US7666191B2 (en) | 1996-12-12 | 2010-02-23 | Intuitive Surgical, Inc. | Robotic surgical system with sterile surgical adaptor |
| US7758569B2 (en) | 1998-02-24 | 2010-07-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US8600551B2 (en) | 1998-11-20 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with operatively couplable simulator unit for surgeon training |
| EP1897511B1 (en) * | 1998-12-08 | 2014-02-12 | Intuitive Surgical Operations, Inc. | Surgical robotic tools, data architecture, and use |
| US7125403B2 (en) | 1998-12-08 | 2006-10-24 | Intuitive Surgical | In vivo accessories for minimally invasive robotic surgery |
| DE19950440A1 (de) | 1999-10-19 | 2001-11-22 | World Of Medicine Lemke Gmbh | Fixiervorrichtung für wenigstens ein, im Sterilbereich bei Operationen einsetzbares Bedienelement, bspw. ein Operationsinstrument |
| US6840938B1 (en) | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| JP4073249B2 (ja) | 2002-05-17 | 2008-04-09 | オリンパス株式会社 | 手術システム |
| US7331967B2 (en) | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| US7386365B2 (en) * | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| US8118732B2 (en) * | 2003-04-01 | 2012-02-21 | Boston Scientific Scimed, Inc. | Force feedback control system for video endoscope |
| US20050244217A1 (en) | 2004-04-29 | 2005-11-03 | William Burke | Test instrument module latch system and method |
| US7096870B2 (en) | 2004-09-30 | 2006-08-29 | Lonnie Jay Lamprich | Disposable sterile surgical drape and attached instruments |
| US8945095B2 (en) * | 2005-03-30 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Force and torque sensing for surgical instruments |
| US7588398B2 (en) * | 2005-04-19 | 2009-09-15 | Black & Decker Inc. | Tool chuck with power take off and dead spindle features |
| US20060260622A1 (en) | 2005-05-19 | 2006-11-23 | Wooley Deborah M | Operating room equipment drapes and methods of making and using the same |
| US8483881B2 (en) | 2005-09-02 | 2013-07-09 | Neato Robotics, Inc. | Localization and mapping system and method for a robotic device |
| KR101337278B1 (ko) * | 2005-12-20 | 2013-12-09 | 인튜어티브 서지컬 인코포레이티드 | 로봇 수술 시스템의 기구 인터페이스 |
| US9586327B2 (en) | 2005-12-20 | 2017-03-07 | Intuitive Surgical Operations, Inc. | Hook and pivot electro-mechanical interface for robotic medical arms |
| WO2007111749A2 (en) * | 2005-12-20 | 2007-10-04 | Intuitive Surgical, Inc. | Method for handling an operator command exceeding a medical device state limitation in a medical robotic system |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| US8010181B2 (en) | 2006-02-16 | 2011-08-30 | Catholic Healthcare West | System utilizing radio frequency signals for tracking and improving navigation of slender instruments during insertion in the body |
| EP2051644A4 (en) | 2006-08-01 | 2013-03-13 | Eon Surgical Ltd | SYSTEM AND METHOD FOR TELECHIRURGY |
| US8157793B2 (en) | 2006-10-25 | 2012-04-17 | Terumo Kabushiki Kaisha | Manipulator for medical use |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US8945148B2 (en) | 2007-06-13 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Surgical system instrument manipulator |
| US8139225B2 (en) | 2007-10-24 | 2012-03-20 | Siemens Medical Solutions Usa, Inc. | System for processing patient monitoring power and data signals |
| US8348129B2 (en) | 2009-10-09 | 2013-01-08 | Ethicon Endo-Surgery, Inc. | Surgical stapler having a closure mechanism |
| US8752749B2 (en) | 2008-02-14 | 2014-06-17 | Ethicon Endo-Surgery, Inc. | Robotically-controlled disposable motor-driven loading unit |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US9895813B2 (en) * | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| CN102014759B (zh) * | 2008-06-11 | 2012-12-26 | 韩商未来股份有限公司 | 用于手术机器人臂的仪器 |
| US8720448B2 (en) | 2008-11-07 | 2014-05-13 | Hansen Medical, Inc. | Sterile interface apparatus |
| US8602031B2 (en) | 2009-01-12 | 2013-12-10 | Hansen Medical, Inc. | Modular interfaces and drive actuation through barrier |
| WO2010126128A1 (ja) | 2009-04-30 | 2010-11-04 | テルモ株式会社 | 医療用マニピュレータ |
| KR101037069B1 (ko) | 2009-09-23 | 2011-05-26 | 주식회사 이턴 | 멸균 어댑터 |
| CN107028660A (zh) | 2009-09-23 | 2017-08-11 | 伊顿株式会社 | 无菌适配器、转轮联接结构以及手术用器械的联接结构 |
| KR101750518B1 (ko) | 2010-02-19 | 2017-06-26 | (주)미래컴퍼니 | 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| WO2011037394A2 (ko) | 2009-09-23 | 2011-03-31 | 주식회사 이턴 | 멸균 어댑터, 휠의 체결 구조 및 수술용 인스트루먼트의 체결 구조 |
| US8555892B2 (en) | 2009-09-28 | 2013-10-15 | Obp Corporation | Mayo stand drape with self-disposing feature |
| KR101590163B1 (ko) | 2009-10-01 | 2016-01-29 | (주)미래컴퍼니 | 수술용 로봇 및 이를 커버하는 멸균 드레이프 |
| KR101924394B1 (ko) | 2009-11-13 | 2018-12-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 독립적으로 회전하는 부재 내의 병렬 구동 샤프트들을 위한 모터 연접부 |
| US9358072B2 (en) * | 2010-01-15 | 2016-06-07 | Immersion Corporation | Systems and methods for minimally invasive surgical tools with haptic feedback |
| US8206395B2 (en) | 2010-06-18 | 2012-06-26 | Spine Wave, Inc. | Surgical instrument and method for the distraction or compression of bones |
| CN103037799B (zh) | 2010-08-02 | 2016-03-09 | 约翰霍普金斯大学 | 用于协作手术机器人的工具更换接口和控制算法 |
| EP2616126A4 (en) | 2010-09-17 | 2017-05-24 | Corindus Inc. | Wheel for robotic catheter system drive mechanism |
| KR101854707B1 (ko) * | 2010-11-15 | 2018-05-04 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 기구에서 기구 샤프트 감김과 단부 작동기 작동의 해제 |
| US9032824B2 (en) | 2010-12-15 | 2015-05-19 | Yamaha Hatsudoki Kabushiki Kaisha | Control device for dual clutch transmission and control method for dual clutch transmission |
| JP5953058B2 (ja) * | 2011-08-04 | 2016-07-13 | オリンパス株式会社 | 手術支援装置およびその着脱方法 |
| WO2013063522A2 (en) | 2011-10-26 | 2013-05-02 | Reid Robert Cyrus | Surgical instrument motor pack latch |
| KR101828452B1 (ko) | 2012-01-05 | 2018-02-12 | 삼성전자주식회사 | 서보 제어 장치 및 그 제어 방법 |
| WO2013119545A1 (en) | 2012-02-10 | 2013-08-15 | Ethicon-Endo Surgery, Inc. | Robotically controlled surgical instrument |
| US9931167B2 (en) * | 2012-02-15 | 2018-04-03 | Intuitive Surgical Operations, Inc. | Minimally invasive surgical instrument to provide needle-based therapy |
| KR101434861B1 (ko) | 2012-04-25 | 2014-09-02 | 주식회사 고영테크놀러지 | 구동력 전달장치 |
| DE102012008535A1 (de) | 2012-04-27 | 2013-10-31 | Kuka Laboratories Gmbh | Chirurgierobotersystem |
| CN107736937B (zh) | 2012-06-01 | 2021-02-05 | 直观外科手术操作公司 | 用于手术系统的器械托架组件 |
| US9364230B2 (en) * | 2012-06-28 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with rotary joint assemblies |
| DE102012013242A1 (de) | 2012-07-03 | 2014-01-09 | Kuka Laboratories Gmbh | Chirurgische Instrumentenanordnung |
| CN103625049A (zh) | 2012-08-29 | 2014-03-12 | 3M创新有限公司 | 无纺布和聚氨酯复合材料及其制备方法 |
| CN114587606A (zh) | 2013-08-15 | 2022-06-07 | 直观外科手术操作公司 | 通向器械无菌适配器的致动器接口 |
| CN109247987B (zh) | 2013-08-15 | 2021-07-23 | 直观外科手术操作公司 | 预加载外科手术器械接口 |
| US10548630B2 (en) | 2014-02-11 | 2020-02-04 | Vanderbilt University | System, method, and apparatus for configuration, design, and operation of an active cannula robot |
| KR20230041105A (ko) | 2014-03-17 | 2023-03-23 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술용 드레이프와 수술용 드레이프를 포함하는 시스템 및 부착 센서 |
| WO2015142788A1 (en) | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Method for engaging surgical instrument with teleoperated actuator |
| GB2538326B (en) | 2015-05-07 | 2019-06-05 | Cmr Surgical Ltd | A surgical drape for transferring drive |
| CN108472029B (zh) | 2016-12-20 | 2021-08-06 | 威博外科公司 | 用于机器人外科系统的无菌适配器控制系统和通信接口 |
-
2015
- 2015-03-17 CN CN201911187941.XA patent/CN110882058B/zh active Active
- 2015-03-17 US US15/126,061 patent/US10595836B2/en active Active
- 2015-03-17 JP JP2016557611A patent/JP6623167B2/ja active Active
- 2015-03-17 EP EP24152876.9A patent/EP4331526A2/en active Pending
- 2015-03-17 KR KR1020217036092A patent/KR102437468B1/ko active IP Right Grant
- 2015-03-17 KR KR1020167028790A patent/KR102324953B1/ko active IP Right Grant
- 2015-03-17 EP EP15764610.0A patent/EP3119322B1/en active Active
- 2015-03-17 EP EP20159147.6A patent/EP3679885B1/en active Active
- 2015-03-17 WO PCT/US2015/021111 patent/WO2015142958A1/en active Application Filing
- 2015-03-17 CN CN201580013953.4A patent/CN106102641B/zh active Active
-
2019
- 2019-10-09 JP JP2019185819A patent/JP6858234B2/ja active Active
-
2020
- 2020-01-24 US US16/751,628 patent/US20200155130A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20200155130A1 (en) | 2020-05-21 |
| EP3119322B1 (en) | 2020-05-06 |
| KR20170005797A (ko) | 2017-01-16 |
| KR102437468B1 (ko) | 2022-08-30 |
| CN106102641B (zh) | 2019-11-22 |
| KR102324953B1 (ko) | 2021-11-12 |
| US20170172549A1 (en) | 2017-06-22 |
| JP6858234B2 (ja) | 2021-04-14 |
| CN106102641A (zh) | 2016-11-09 |
| JP2020006236A (ja) | 2020-01-16 |
| EP3119322A4 (en) | 2017-12-27 |
| CN110882058B (zh) | 2023-06-20 |
| KR20210137230A (ko) | 2021-11-17 |
| US10595836B2 (en) | 2020-03-24 |
| EP4331526A2 (en) | 2024-03-06 |
| EP3679885B1 (en) | 2024-02-28 |
| CN110882058A (zh) | 2020-03-17 |
| EP3679885A1 (en) | 2020-07-15 |
| EP3119322A1 (en) | 2017-01-25 |
| WO2015142958A1 (en) | 2015-09-24 |
| JP2017512548A (ja) | 2017-05-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6858234B2 (ja) | ディスクの係合を確認するためのシステム及び方法 | |
| US20230200792A1 (en) | Systems and methods for instrument engagement | |
| JP6262216B2 (ja) | 零空間を使用して操作アーム間の衝突を回避するためのシステム及び方法 | |
| KR102167359B1 (ko) | 영공간을 이용한 수술 머니퓰레이터의 명령된 재구성을 위한 시스템 및 방법 | |
| CN107595392B (zh) | 使用零空间回避操纵器臂与患者碰撞 | |
| CN108309454B (zh) | 用于通过在零垂直空间内进行咬合同时发生零空间移动而定位操纵器臂的系统和方法 | |
| CN108143497B (zh) | 用于利用零空间跟踪路径的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170308 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180308 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190329 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191009 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20191018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6623167 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |