JP6202981B2 - 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 - Google Patents
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 Download PDFInfo
- Publication number
- JP6202981B2 JP6202981B2 JP2013217638A JP2013217638A JP6202981B2 JP 6202981 B2 JP6202981 B2 JP 6202981B2 JP 2013217638 A JP2013217638 A JP 2013217638A JP 2013217638 A JP2013217638 A JP 2013217638A JP 6202981 B2 JP6202981 B2 JP 6202981B2
- Authority
- JP
- Japan
- Prior art keywords
- feature
- marker
- virtual object
- image
- virtual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/006—Mixed reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
Description
例えば、カードに印刷された2次元バーコードを用いる技術がある。この技術では、カメラの撮像画像からAR用のマーカとして2次元バーコードが識別され、該マーカに対応付けられた3次元画像データが2次元バーコードの位置に重畳して表示装置に表示される。
づく位置に表示される。また、特徴検出手段によって、第1の特徴が継続して検出される一方、第2の特徴が検出されない場合に、変更手段は、第1の特徴の仮想オブジェクトの関連付けの変更を維持するようにすることによって、第2の特徴が撮像範囲から外れた場合でも、元々第2の特徴関連付けられている仮想オブジェクトは表示され続けることになる。これによって、視覚的な変化に富んだ拡張現実技術を提供することができる。
である。
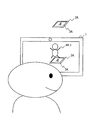
図1は、第1実施形態に係る情報処理システム100の構成の一例を示す図である。情報処理システム100には、情報処理装置1、カード2A、2Y(但し、カードの種類を区別しない場合には、単に「カード2」と称する)が含まれる。
13、補助記憶装置14、前面撮像装置15A、背面撮像装置15B、ディスプレイ(表示装置)16、および各種ボタンやタッチパネル等の入力装置17が電気的に接続された情報処理装置である。なお、情報処理装置1の具体的なハードウェア構成に関しては、実施の形態毎に適宜構成要素の省略や置換、追加が行われてよい。例えば、情報処理装置1が、据え置き型のゲーム装置である場合には、撮像装置、ディスプレイ16、入力装置17等はそれぞれ独立した装置であり、周辺装置として情報処理装置1に接続される。
よって制御され、各種命令やデータが書き込まれ、読み出される。即ち、CPU11、RAM12、およびROM13は、情報処理装置1の制御部を構成する。
対して着脱可能に装着される可搬媒体が用いられてもよい。可搬媒体の例としては、EEPROM等によるメモリーカード、CD(Compact Disc)、DVD(Digital Versatile Disc)およびBD(Blu-ray(登録商標) Disc)等が挙げられる。可搬媒体による補助記憶装置14と、可搬型ではない補助記憶装置14とは、組み合わせて用いることも可能である。
る。そのため、マーカ3は、仮想オブジェクトの表示姿勢を特定することが可能なものであることが好ましい。即ち、マーカ3は、撮像装置15を用いて撮像されることで、撮像装置15に対する位置および姿勢を特定可能な記号、文字、図形、絵、およびそれらの組み合わせ等であることが好ましい。なお、第1実施形態において、姿勢は、直交する3軸によって構成される座標系において特定される。
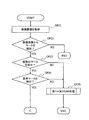
次に、第1実施形態において実行される処理の流れを説明する。なお、第1実施形態に係るフローチャートに示された処理の具体的な内容および処理順序は、本発明を実施するための一例である。具体的な処理内容および処理順序は、本発明の実施の形態毎に適宜選
択されてよい。
マーカ3の検出がないまま所定時間(例えば、5分)経過すると、オブジェクト決定部25は、該当のマーカ3の計測経過時間を削除する。処理OP3において、処理対象のマーカ3の計測経過時間が記録されていない場合には、オブジェクト決定部25は、処理対象マーカ3の計測経過時間が第1の時間閾値未満である(OP3:NO)、と判定する。
ともに姿勢検出部23によって表示基準情報として検出されており、画像生成部26は、表示基準情報に従ってマーカ3に基づく所定の位置に仮想オブジェクトを配置する。次に処理がOP8に進む。
の場合に、図5に示されるフローチャートの処理では、次に該当のマーカ3が検出された場合には、背面カメラ対応情報中のポインタが指し示す仮想オブジェクト、すなわち、前回の該当のマーカ3の検出時に表示された仮想オブジェクトと同じ仮想オブジェクトが表示されることになる。これに代えて、オブジェクト決定部25は、マーカ3の計測経過時間の記録の削除に伴い、該マーカ3の背面カメラ対応情報中のポインタの位置を初期設定に戻すようにしてもよい。背面カメラ対応情報中のポインタの初期設定の位置は、例えば、該当のマーカ3に関連付けられる複数の仮想オブジェクトのリストの先頭である。
第1実施形態の第1のAR処理では、マーカ3の認識状況に応じて、該マーカ3に対応する位置に配置される仮想オブジェクトが変化する。これによって、AR処理を視覚的変化に富んだエンターテイメント性の高いものとすることができる。
第1のAR処理では、マーカ3の前回の検出からの経過時間が第1の時間閾値以上第2の時間閾値未満の範囲内で今回の検出が発生する度に、マーカ3に基づく所定の位置に配置される仮想オブジェクトが変化する。これに代えて、マーカ3が連続して検出される時間又は回数に応じて、マーカ3に基づく所定の位置に配置される仮想オブジェクトが変化するようにしてもよい。
該キャラクタの姿勢やポーズなどが変わったり、眠ったり走ったりという動作が変化したりしてもよい。
第2実施形態では、情報処理装置は、第2のAR処理を行う。第2のAR処理では、現実空間の撮像手段に応じて、表示される仮想オブジェクトが変化する。第2実施形態では、第1実施形態と重複する説明は省略される。
たマーカ3の情報が保持されていない場合には、背面カメラ対応情報を参照して、仮想オブジェクトを決定する。ただし、これに限られず、前面カメラ対応情報が情報処理システム100内で用いられる全マーカ3について用意されており、背面カメラ対応情報は、全てのマーカ3について用意されていなくてもよい。または、背面カメラ対応情報及び前面カメラ対応情報のいずれも、全てのマーカ3について用意されていなくてもよい。撮像画像から検出されたマーカ3に該当する情報が、背面カメラ対応情報及び前面カメラ対応情報のいずれにもない場合には、該マーカ3に基づく所定の位置には仮想オブジェクトが表示されない。
図7は、第2のAR処理のフローチャートの一例である。図7に示されるフローチャートは、情報処理装置1において、AR機能を起動するユーザ操作が受け付けられたことを契機として開始される。
15Bで撮像している間には表示されなかった仮想オブジェクトが表示されることによって、該仮想オブジェクトを隠しキャラクタとしてユーザに提示することができ、ユーザに驚き、興奮等を与えることができる。
第2のAR処理では、マーカ3の検出手段が前面カメラ15A、背面カメラ15Bのいずれであるかによって、該マーカ3に対応する位置に配置される仮想オブジェクトが変化する。これによって、AR処理を視覚的変化に富んだエンターテイメント性の高いものとすることができる。
第2のAR処理では、前面カメラ15A、背面カメラ15Bのいずれで撮像されたかによって、マーカ3に基づく所定の位置に配置される仮想オブジェクトが変化する。前面カメラ15A、背面カメラ15Bが、それぞれ複数備えられる場合には、各撮像装置について対応情報を用意することで、いずれの撮像装置で撮像されたかによって、マーカ3に対応する位置に表示される仮想オブジェクトを切り替えることができる。例えば、立体視用に、背面カメラ15Bが、右目用カメラと左目用カメラとを備える場合に、右目用カメラ対応情報と、左目用カメラ対応情報とを用意することで、右目用カメラで撮像された場合と、左目用カメラで撮像された場合とで、マーカ3に基づく所定の位置に表示される仮想オブジェクトを切り替えることができる。
示される仮想オブジェクトを、背面カメラ15Bで撮像することができる。また、同様にして、背面カメラ15Bでマーカ3を撮像した場合に表示される仮想オブジェクトを、前面カメラ15Aで撮像することも可能である。
第3実施形態では、情報処理装置1は、第3のAR処理を実行する。第3のAR処理では、基準マーカ3Yが検出されることによって、基準マーカ3Y以外の検出されたマーカ3に関連付けられていた仮想オブジェクトが、基準マーカ3Yに関連付けられる。第3実施形態では、第1、第2実施形態と重複する説明は省略される。
図10A及び図10Bは、第3のAR処理のフローチャートの一例である。図10A及び図10Bに示されるフローチャートは、情報処理装置1において、AR機能を起動するユーザ操作が受け付けられたことを契機として開始される。
ェクトと、ノーマルマーカ3との関連付けが維持される場合には、ノーマルマーカ3を情報処理装置1に認識し直させるユーザ行為の繰り返しによって、該仮想オブジェクトと同じ仮想オブジェクトが表示されることになる。これによって、同じ画面上に、同じ仮想オブジェクトが複数表示させることができる。
第3のAR処理では、基準マーカ3Yとノーマルマーカ3とがともに検出されることによって、ノーマルマーカ3に関連付けられる仮想オブジェクトが基準マーカ3Yに関連付けられる。これによって、AR処理を視覚的変化に富んだエンターテイメント性の高いものとすることができる。
第3のAR処理において、基準マーカ3Yに基づく仮想オブジェクトの配置ポイントがあらかじめ複数設定されており、ノーマルマーカ3に基づく所定の位置に配置される仮想オブジェクトに、最寄りの配置ポイントに移動させる命令を実行させるようにしてもよい。すでに、最寄りの配置ポイントに別の仮想オブジェクトが配置されている場合には、空いている配置ポイントのうちノーマルマーカ3に基づく所定の位置に最も近い配置ポイントに移動させるようにする。また、ノーマルマーカ3に基づく所定の位置に配置される仮想オブジェクトが最寄りの配置ポイントへ移動中に、撮像画像内での基準マーカ3Yの位置が変わり、移動先であった最寄りの配置ポイントも移動した場合には、新たに仮想オブジェクトから最寄りの配置ポイントを検出して、該検出した配置ポイントを該仮想オブジェクトの移動先としてもよい。仮想オブジェクトの制御は、例えば、専用のプログラムによって行われており、該プログラムに最寄りの配置ポイントに移動させる命令を実行させる。
第4実施形態では、情報処理装置は、第4のAR処理を行う。第4のAR処理では、マーカ3の姿勢に応じて、表示される仮想オブジェクトの態様が変化する。第4実施形態では、第1〜第3実施形態と重複する説明は省略される。
第4実施形態では、検出されたマーカ3の姿勢に応じて、表示される仮想オブジェクトの態様が変化する。これによって、視覚的変化に富んだAR処理を提供することができる。また、ユーザに対して、マーカ3の姿勢変化への探究心を煽ることができる。
上記説明した実施形態において、表示制御部27は、撮像画像に仮想空間の画像を重畳した合成画像を表示装置に表示させることで、ユーザが、仮想空間の画像が現実空間に重畳されて視認可能とする。但し、表示制御部27は、仮想空間の画像が現実空間に重畳さ
れてユーザから視認されるように、表示装置に画像を表示させればよく、合成画像を表示する方式に限定されない。例えば、本発明は、HUD(Head−Up Display)や、ユーザが装着しているメガネに仮想空間画像を映写する方式等、ユーザの視界に仮想空間画像を映写することで仮想空間の画像が現実空間に重畳されてユーザから視認されるタイプの拡張現実技術に適用されてもよい。
2A、2Y カード
3A、3Y マーカ
21 撮像画像取得部
22 特徴検出部
23 姿勢検出部
24 表示基準情報記憶部
25 オブジェクト決定部
26 画像生成部
27 表示制御部
Claims (11)
- コンピュータを、
撮像装置によって撮像された現実空間の画像を取得する画像取得手段と、
前記画像から第1の特徴と第2の特徴とを検出する特徴検出手段と、
前記第2の特徴に関連付けられている仮想オブジェクトを、前記第1の特徴に関連付けられる仮想オブジェクトとして、追加して、前記第1の特徴の仮想オブジェクトの関連付けを変更する変更手段と、
前記第1の特徴に基づいて前記第1の特徴に関連付けられた仮想オブジェクトが配置された仮想空間の画像を生成する画像生成手段と、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させる表示制御手段と、
として機能させる情報処理プログラム。 - 前記変更手段は、前記特徴検出手段によって、前記第1の特徴の検出が継続する一方、前記第2の特徴が検出されなくなった場合に、前記第1の特徴の仮想オブジェクトの関連付けの前記変更を維持する、
請求項1に記載の情報処理プログラム。 - 前記変更手段は、前記特徴検出手段によって前記第1の特徴が所定時間検出されない場合に、前記第1の特徴の仮想オブジェクトの関連付けの前記変更をリセットする、
請求項1又は2に記載の情報処理プログラム。 - 前記変更手段は、前記特徴検出手段による前記第2の特徴の検出が中断し、再開された場合には、前記第2の特徴に関連付けられている仮想オブジェクトを、さらに前記第1の特徴に関連付ける、
請求項1から3のいずれか一項に記載の情報処理プログラム。 - 前記変更手段は、前記特徴検出手段による前記第2の特徴の検出が継続する間、所定周期で、前記第2の特徴に関連付けられている仮想オブジェクトを前記第1の特徴に関連付けられている仮想オブジェクトに追加する、
請求項1から3のいずれか一項に記載の情報処理プログラム。 - 前記変更手段は、前記第2の特徴に関連付けられている仮想オブジェクトを前記第1の特徴に関連付けた後、前記第2の特徴と該仮想オブジェクトとの関連付けを削除する、
請求項1から3のいずれか一項に記載の情報処理プログラム。 - コンピュータを、
前記第1の特徴に新たに関連付けられた仮想オブジェクトを、前記第1の特徴に対応する所定の位置に移動するように動作を設定する設定手段としてさらに機能させる、
請求項1から6のいずれか一項に記載の情報処理プログラム。 - 前記変更手段は、前記第1の特徴に予め関連付けられている第1の仮想オブジェクトに加え、前記第2の特徴に関連付けられている仮想オブジェクトを追加し、前記第1の特徴の仮想オブジェクトの関連付けを変更し、
前記画像生成手段は、第1の仮想オブジェクト及び前記仮想オブジェクトを前記第1の特徴に基づいて仮想空間に配置する、
請求項1から6のいずれか一項に記載の情報処理プログラム。 - 撮像装置によって撮像された現実空間の画像を取得する画像取得手段と、
前記画像から第1の特徴と第2の特徴とを検出する特徴検出手段と、
前記第2の特徴に関連付けられている仮想オブジェクトを、前記第1の特徴に関連付けられる仮想オブジェクトとして、追加して、前記第1の特徴の仮想オブジェクトの関連付けを変更する変更手段と、
前記第1の特徴に基づいて前記第1の特徴に関連付けられた仮想オブジェクトが配置された仮想空間の画像を生成する画像生成手段と、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させる表示制御手段と、
を備える情報処理装置。 - コンピュータと、
撮像装置と、
表示装置と、
現実空間に配置される第1の特徴及び第2の特徴と、
を含む情報処理システムであって、
前記コンピュータが、
前記撮像装置によって撮像された現実空間の画像を取得する画像取得手段と、
前記画像から前記第1の特徴と前記第2の特徴とを検出する特徴検出手段と、
前記第2の特徴に関連付けられている仮想オブジェクトを、前記第1の特徴に関連付けられる仮想オブジェクトとして、追加して、前記第1の特徴の仮想オブジェクトの関連付けを変更する変更手段と、
前記第1の特徴に基づいて前記第1の特徴に関連付けられた仮想オブジェクトが配置された仮想空間の画像を生成する画像生成手段と、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、前記表示装置に画像を表示させる表示制御手段と、
を備える情報処理システム。 - コンピュータが、
撮像装置によって撮像された現実空間の画像を取得し、
前記画像から第1の特徴と第2の特徴とを検出し、
前記第2の特徴に関連付けられている仮想オブジェクトを、前記第1の特徴に関連付けられる仮想オブジェクトとして、追加して、前記第1の特徴の仮想オブジェクトの関連付
けを変更し、
前記第1の特徴に基づいて前記第1の特徴に関連付けられた仮想オブジェクトが配置された仮想空間の画像を生成し、
前記仮想空間の画像が現実空間に重畳されてユーザから視認されるように、表示装置に画像を表示させる、
情報処理方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013217638A JP6202981B2 (ja) | 2013-10-18 | 2013-10-18 | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 |
| US14/270,749 US10062211B2 (en) | 2013-10-18 | 2014-05-06 | Computer-readable recording medium recording information processing program, information processing apparatus, information processing system, and information processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013217638A JP6202981B2 (ja) | 2013-10-18 | 2013-10-18 | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015079447A JP2015079447A (ja) | 2015-04-23 |
| JP2015079447A5 JP2015079447A5 (ja) | 2016-11-10 |
| JP6202981B2 true JP6202981B2 (ja) | 2017-09-27 |
Family
ID=52825797
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013217638A Active JP6202981B2 (ja) | 2013-10-18 | 2013-10-18 | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10062211B2 (ja) |
| JP (1) | JP6202981B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140067869A1 (en) * | 2012-08-30 | 2014-03-06 | Atheer, Inc. | Method and apparatus for content association and history tracking in virtual and augmented reality |
| JP6645058B2 (ja) * | 2015-07-17 | 2020-02-12 | 富士通株式会社 | Cgエージェント表示方法、cgエージェント表示プログラム、及び情報処理端末 |
| EP3411779A4 (en) * | 2016-02-05 | 2019-02-20 | Magic Leap, Inc. | SYSTEMS AND METHODS FOR INCREASED REALITY |
| JP2017182460A (ja) * | 2016-03-30 | 2017-10-05 | セイコーエプソン株式会社 | 頭部装着型表示装置、頭部装着型表示装置の制御方法、コンピュータープログラム |
| US10643390B2 (en) | 2016-03-30 | 2020-05-05 | Seiko Epson Corporation | Head mounted display, method for controlling head mounted display, and computer program |
| JP6698864B2 (ja) * | 2016-11-08 | 2020-05-27 | 三菱電機株式会社 | 物体検知装置および物体検知方法 |
| JP2021081757A (ja) * | 2018-03-12 | 2021-05-27 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、および、プログラム |
| JP7264788B2 (ja) * | 2019-10-08 | 2023-04-25 | Kddi株式会社 | 提示システム、サーバ及び端末 |
| FR3102592B1 (fr) * | 2019-10-29 | 2022-02-11 | Immersion | Procédé d’interaction avec un utilisateur d’un système immersif et dispositif pour la mise en œuvre d’un tel procédé |
| US11816757B1 (en) * | 2019-12-11 | 2023-11-14 | Meta Platforms Technologies, Llc | Device-side capture of data representative of an artificial reality environment |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000322602A (ja) | 1999-05-12 | 2000-11-24 | Sony Corp | 画像処理装置および方法、並びに媒体 |
| JP2005143657A (ja) * | 2003-11-12 | 2005-06-09 | Olympus Corp | 情報呈示システム、情報呈示装置、情報呈示装置のための媒体、情報呈示方法、及び情報提示プログラム |
| KR100932634B1 (ko) * | 2007-12-27 | 2009-12-21 | 팅크웨어(주) | 증강 현실을 이용한 3차원 웹 지도 서비스 방법 및 그시스템 |
| JP4626668B2 (ja) * | 2008-04-03 | 2011-02-09 | ソニー株式会社 | 画像処理装置、表示制御方法、プログラム及び記録媒体 |
| US8542906B1 (en) * | 2008-05-21 | 2013-09-24 | Sprint Communications Company L.P. | Augmented reality image offset and overlay |
| KR101436839B1 (ko) * | 2008-07-31 | 2014-09-03 | 삼성전자주식회사 | 사람 수 체크를 이용한 셀프타이머 촬영 장치 및 방법 |
| EP2339537B1 (en) * | 2009-12-23 | 2016-02-24 | Metaio GmbH | Method of determining reference features for use in an optical object initialization tracking process and object initialization tracking method |
| US20120120103A1 (en) * | 2010-02-28 | 2012-05-17 | Osterhout Group, Inc. | Alignment control in an augmented reality headpiece |
| JP5646263B2 (ja) * | 2010-09-27 | 2014-12-24 | 任天堂株式会社 | 画像処理プログラム、画像処理装置、画像処理システム、および、画像処理方法 |
| JP2012155655A (ja) * | 2011-01-28 | 2012-08-16 | Sony Corp | 情報処理装置、報知方法及びプログラム |
| JP5691632B2 (ja) * | 2011-02-24 | 2015-04-01 | 株式会社大林組 | 画像合成方法 |
| JP5741160B2 (ja) * | 2011-04-08 | 2015-07-01 | ソニー株式会社 | 表示制御装置、表示制御方法、およびプログラム |
| JP2013050883A (ja) * | 2011-08-31 | 2013-03-14 | Nintendo Co Ltd | 情報処理プログラム、情報処理システム、情報処理装置および情報処理方法 |
| JP5821526B2 (ja) * | 2011-10-27 | 2015-11-24 | ソニー株式会社 | 画像処理装置、画像処理方法及びプログラム |
-
2013
- 2013-10-18 JP JP2013217638A patent/JP6202981B2/ja active Active
-
2014
- 2014-05-06 US US14/270,749 patent/US10062211B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10062211B2 (en) | 2018-08-28 |
| JP2015079447A (ja) | 2015-04-23 |
| US20150109336A1 (en) | 2015-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6192483B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 | |
| JP6202981B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 | |
| JP6202980B2 (ja) | 情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法 | |
| US10796467B2 (en) | Systems and methods for utilizing a living entity as a marker for augmented reality content | |
| JP5697487B2 (ja) | 画像処理システム、画像処理方法、画像処理装置、および画像処理用プログラム | |
| JP7079231B2 (ja) | 情報処理装置及び情報処理システム及び制御方法、プログラム | |
| JP6224327B2 (ja) | 情報処理システム、情報処理装置、情報処理方法、および情報処理用プログラム | |
| JP6021592B2 (ja) | 情報処理用プログラム、情報処理装置、情報処理システム、および情報処理方法 | |
| US9064335B2 (en) | System, method, device and computer-readable medium recording information processing program for superimposing information | |
| EP2491989A2 (en) | Information processing system, information processing method, information processing device and information processing program | |
| JP6021568B2 (ja) | 画像処理用プログラム、画像処理装置、画像処理システム、および画像処理方法 | |
| JP2016122392A (ja) | 情報処理装置、情報処理システム、その制御方法及びプログラム | |
| JP6283168B2 (ja) | 情報保持媒体および情報処理システム | |
| JP6099448B2 (ja) | 画像処理用プログラム、情報処理装置、情報処理システム、および画像処理方法 | |
| JP2021166091A (ja) | 画像処理装置、画像処理方法、コンピュータプログラム | |
| JP6514386B1 (ja) | プログラム、記録媒体及び画像生成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170801 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170829 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6202981 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |