JP5884697B2 - Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program - Google Patents
Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program Download PDFInfo
- Publication number
- JP5884697B2 JP5884697B2 JP2012214684A JP2012214684A JP5884697B2 JP 5884697 B2 JP5884697 B2 JP 5884697B2 JP 2012214684 A JP2012214684 A JP 2012214684A JP 2012214684 A JP2012214684 A JP 2012214684A JP 5884697 B2 JP5884697 B2 JP 5884697B2
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- prediction
- candidate
- vector predictor
- predicted
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

































Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
本発明は、動画像符号化技術に関し、特に動き補償予測を利用した動画像符号化技術に関する。 The present invention relates to a moving picture coding technique, and more particularly to a moving picture coding technique using motion compensated prediction.
動画像の圧縮符号化方式の代表的なものとして、MPEG−4 AVC/H.264の規格がある。MPEG−4 AVC/H.264では、ピクチャを複数の矩形ブロックに分割し、すでに符号化・復号したピクチャを参照ピクチャとし、参照ピクチャからの動きを予測する動き補償が用いられている。この動き補償により動きを予測する手法をインター予測と呼ぶ。MPEG−4 AVC/H.264でのインター予測では、複数のピクチャを参照ピクチャとして用いることができ、これらの複数の参照ピクチャから最も適した参照ピクチャをブロック毎に選択して動き補償を行う。そこで、それぞれの参照ピクチャには参照インデックスが割り当てられ、この参照インデックスにより、参照ピクチャを特定する。なお、Bピクチャでは、符号化・復号済みの参照ピクチャから最大で2枚を選択してインター予測に用いることができる。それらの2枚の参照ピクチャからの予測をそれぞれ主に前方向の予測として使われるL0予測(リスト0予測)、主に後方向の予測として使われるL1予測(リスト1予測)として区別している。
As a typical moving image compression encoding method, MPEG-4 AVC / H. There are H.264 standards. MPEG-4 AVC / H. In H.264, motion compensation is used in which a picture is divided into a plurality of rectangular blocks, a picture that has already been encoded / decoded is used as a reference picture, and motion from the reference picture is predicted. A technique for predicting motion by this motion compensation is called inter prediction. MPEG-4 AVC / H. In the inter prediction in H.264, a plurality of pictures can be used as reference pictures, and the most suitable reference picture is selected for each block from the plurality of reference pictures to perform motion compensation. Therefore, a reference index is assigned to each reference picture, and the reference picture is specified by this reference index. Note that, for B pictures, a maximum of two reference pictures that have been encoded and decoded can be selected and used for inter prediction. The predictions from these two reference pictures are distinguished as L0 prediction (
さらに、L0予測とL1予測の2つのインター予測を同時に用いる双予測も定義されている。双予測の場合は、双方向の予測を行い、L0予測、L1予測のそれぞれのインター予測された信号に重み付け係数を掛け算し、オフセット値を加算して重畳し、最終的なインター予測画像信号を生成する。重み付け予測に用いる重み付け係数及びオフセット値はピクチャ単位で各リストの参照ピクチャ毎に代表的な値が設定され、符号化される。インター予測に関する符号化情報には、ブロック毎に、L0予測とL1予測、双予測を区別する予測モード、ブロック毎の参照リスト毎に、参照ピクチャを特定する参照インデックス、ブロックの移動方向・移動量を表す動きベクトルがあり、これらの符号化情報を符号化・復号する。 Furthermore, bi-prediction using two inter predictions of L0 prediction and L1 prediction at the same time is also defined. In the case of bi-prediction, bi-directional prediction is performed, the inter-predicted signals of L0 prediction and L1 prediction are multiplied by a weighting coefficient, an offset value is added and superimposed, and a final inter-predicted image signal is obtained. Generate. As weighting coefficients and offset values used for weighted prediction, representative values are set for each reference picture in each list and encoded. The encoding information related to inter prediction includes, for each block, a prediction mode for distinguishing between L0 prediction and L1 prediction and bi-prediction, a reference index for specifying a reference picture for each reference list for each block, and a moving direction and a moving amount of the block. There is a motion vector that expresses and encodes and decodes the encoded information.
動き補償を行う動画像符号化方式では、各ブロックで生成される動きベクトルの符号量を削減する為に、動きベクトルに対して予測処理が行われる。MPEG−4 AVC/H.264では、符号化対象の動きベクトルが周囲の隣接ブロックの動きベクトルと強い相関があることを利用して、周囲の隣接ブロックからの予測を行うことにより予測動きベクトルを算出し、符号化対象の動きベクトルと予測動きベクトルとの差分である差分動きベクトルを算出し、その差分動きベクトルを符号化することによって符号量を削減している。 In a moving picture coding system that performs motion compensation, a prediction process is performed on a motion vector in order to reduce the amount of code of the motion vector generated in each block. MPEG-4 AVC / H. In H.264, using the fact that the motion vector to be encoded has a strong correlation with the motion vectors of neighboring neighboring blocks, a prediction motion vector is calculated by performing prediction from neighboring neighboring blocks, and the coding target motion vector is calculated. A difference motion vector that is a difference between the motion vector and the predicted motion vector is calculated, and the difference motion vector is encoded to reduce the amount of codes.
具体的には、図36(a)に示されるように、周囲の隣接ブロックA,B,Cの動きベクトルから中央値を算出して予測動きベクトルとし、動きベクトルとその予測動きベクトルとの差分をとることで動きベクトルの符号量を削減している。但し、図36(b)のように符号化対象ブロックと隣接ブロックの大きさや形状が異なる場合は、左隣に複数の隣接ブロックがある時はその中の一番上のブロックを、上に複数の隣接ブロックがある時はその中の一番左のブロックを予測ブロックとし、決定された予測ブロックの動きベクトルから予測を実施する。 Specifically, as shown in FIG. 36 (a), a median value is calculated from the motion vectors of neighboring blocks A, B, and C in the vicinity to obtain a predicted motion vector, and the difference between the motion vector and the predicted motion vector By taking this, the amount of code of the motion vector is reduced. However, if the size and shape of the encoding target block and the adjacent block are different as shown in FIG. 36B, when there are a plurality of adjacent blocks on the left, When there is an adjacent block, the leftmost block is used as a prediction block, and prediction is performed from the determined motion vector of the prediction block.
しかし、従来の方法では、予測ベクトルは一つしか得られないため、画像によっては予測動きベクトルの予測精度が低下し、符号化効率が良くならない場合もあった。 However, in the conventional method, since only one prediction vector is obtained, the prediction accuracy of the prediction motion vector may be lowered depending on the image, and the encoding efficiency may not be improved.
このような状況下、本発明者らは、動き補償予測を使用する動画像符号化方式において、符号化情報をより一層圧縮し、全体の符号量を削減する必要性を認識するに至った。 Under such circumstances, the present inventors have come to recognize the necessity of further compressing the encoded information and reducing the overall code amount in the moving image encoding method using motion compensation prediction.
本発明はこうした状況に鑑みてなされたものであり、その目的は、予測動きベクトルの候補を算出することにより、差分動きベクトルの符号量の削減を図って符号化効率を向上させる動画像符号化技術を提供することにある。また、別の目的は、符号化情報の候補を算出することにより、符号化情報の符号量の削減を図って符号化効率を向上させる動画像符号化技術を提供することにある。 The present invention has been made in view of such a situation, and an object of the present invention is to calculate a motion vector encoding that improves the encoding efficiency by calculating a prediction motion vector candidate, thereby reducing the code amount of the difference motion vector. To provide technology. Another object of the present invention is to provide a moving image encoding technique that improves the encoding efficiency by calculating the encoding information candidates, thereby reducing the amount of encoding information.
上記課題を解決するために、本発明のある態様の動画像符号化装置は、各ピクチャを分割したブロック単位で動きベクトルを用いて動画像を符号化する動画像符号化装置であって、符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成部(121)と、所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録部(122)と、前記予測動きベクトル候補登録部により前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定部(123)と、前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限部(124)と、前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択部(126)と、前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化部(109)とを備える。 In order to solve the above-described problem, a moving image encoding device according to an aspect of the present invention is a moving image encoding device that encodes a moving image using a motion vector in units of blocks obtained by dividing each picture. A first and second predicted motion vector candidates are derived from any motion vector of an encoded block close to the encoding target block in the same picture as the encoding target block, and a code different from the encoding target block either the motion vectors or these blocks in reduction already picture, the third prediction motion prediction motion vector candidate generation unit for deriving a vector candidates (121), the predetermined condition is satisfied the first, second and third predicted motion vector candidate is registered in the predicted motion vector candidate list predicted motion vector candidate registration unit (122), prior to the said predicted motion vector candidate registration unit When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list is the same as the value of the second motion vector predictor candidate, the second motion vector predictor candidate is selected from the motion vector predictor candidate list. When the number of predicted motion vector candidates to be deleted (123) to be deleted and the number of predicted motion vector candidates registered in the predicted motion vector candidate list are smaller than a predetermined number (two or more natural numbers), predicted motion vector candidate A motion vector predictor candidate restriction unit (124) for registering motion vector predictor candidates having the same value in the motion vector predictor candidate list repeatedly until the number reaches a predetermined number; It predicted motion vector to select a prediction motion vector selection portion (126), the predicted motion vector candidate list And a coding unit (109) for encoding information indicating the index of the predicted motion vector to be the definitive selection.
本発明のさらに別の態様は、動画像符号化方法である。この方法は、各ピクチャを分割したブロック単位で動きベクトルを用いて動画像を符号化する動画像符号化方法であって、符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを備える。 Yet another aspect of the present invention is a video encoding method. This method is a moving image coding method for coding a moving image using a motion vector in units of blocks obtained by dividing each picture, and is a code close to the coding target block in the same picture as the coding target block. of already from either the motion vector of the block, to derive the first and second predicted motion vector candidates, one of the motion vector whether these blocks in the encoding target block is different coded picture, third prediction motion prediction motion vector candidate generation step of deriving a vector candidates, the predetermined condition is satisfied first, the predicted motion vector candidate to register the second and third candidate predicted motion vector to the prediction motion vector candidate list a registration step, the predicted motion vector candidate registration step by the predicted motion vector candidate list on the registered first prediction When the value of the predicted motion vector candidate value and the second vector candidate can have the same, the prediction motion vector candidate redundancy judgment step of deleting the second predicted motion vector candidate from the predicted motion vector candidate list, the prediction motion When the number of motion vector predictor candidates registered in the vector candidate list is smaller than a predetermined number (a natural number of 2 or more), a motion vector predictor candidate having the same value is repeated until the number of motion vector predictor candidates reaches a predetermined number. A prediction motion vector candidate restriction step registered in the prediction motion vector candidate list, a prediction motion vector selection step of selecting a prediction motion vector of the coding target block from the prediction motion vector candidate list, and the prediction motion vector candidate list encoding information indicating the index of the predicted motion vector to be selected in That includes an encoding step.
本発明のさらに別の態様は、送信装置である。この装置は、各ピクチャを分割したブロック単位で動きベクトルを用いて動画像を符号化する動画像符号化方法により符号化された符号化ビット列をパケット化して符号化データを得るパケット処理部と、パケット化された前記符号化データを送信する送信部とを備える。前記動画像符号化方法は、符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを有する。 Yet another embodiment of the present invention is a transmission device. The apparatus includes a packet processing unit that packetizes an encoded bit sequence encoded by a moving image encoding method that encodes a moving image using a motion vector in units of blocks obtained by dividing each picture, and obtains encoded data; A transmission unit that transmits the packetized encoded data. The moving image encoding method derives first and second predicted motion vector candidates from motion vectors of encoded blocks adjacent to the encoding target block in the same picture as the encoding target block. and, one of the motion vector whether these blocks in the encoding target block is different coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector, a predetermined condition is satisfied the A predicted motion vector candidate registration step for registering the first, second and third predicted motion vector candidates in the predicted motion vector candidate list, and the first motion vector candidate registered in the predicted motion vector candidate list by the predicted motion vector candidate registration step. When the value of one predicted motion vector candidate and the value of the second predicted motion vector candidate are the same, the predicted motion vector A predicted motion vector candidate redundancy judgment step of deleting the second predicted motion vector candidate from Le candidate list, the predicted motion vector candidate number a predetermined number of list predicted motion vector candidates registered in the (natural number of 2 or more) than If the number of motion vector predictor candidates is smaller, the motion vector predictor candidate restriction step of registering motion vector predictor candidates having the same value in the motion vector predictor candidate list repeatedly until the number of motion vector predictor candidates reaches a predetermined number; And a prediction motion vector selection step of selecting a prediction motion vector of the block to be encoded, and an encoding step of encoding information indicating an index of the prediction motion vector to be selected in the prediction motion vector candidate list.
本発明のさらに別の態様は、送信方法である。この方法は、各ピクチャを分割したブロック単位で動きベクトルを用いて動画像を符号化する動画像符号化方法により符号化された符号化ビット列をパケット化して符号化データを得るパケット処理ステップと、パケット化された前記符号化データを送信する送信ステップとを備える。前記動画像符号化方法は、符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを有する。 Yet another embodiment of the present invention is a transmission method. In this method, a packet processing step of packetizing an encoded bit string encoded by a moving image encoding method that encodes a moving image using a motion vector in units of blocks obtained by dividing each picture to obtain encoded data; Transmitting the packetized encoded data. The moving image encoding method derives first and second predicted motion vector candidates from motion vectors of encoded blocks adjacent to the encoding target block in the same picture as the encoding target block. and, one of the motion vector whether these blocks in the encoding target block is different coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector, a predetermined condition is satisfied the A predicted motion vector candidate registration step for registering the first, second and third predicted motion vector candidates in the predicted motion vector candidate list, and the first motion vector candidate registered in the predicted motion vector candidate list by the predicted motion vector candidate registration step. When the value of one predicted motion vector candidate and the value of the second predicted motion vector candidate are the same, the predicted motion vector A predicted motion vector candidate redundancy judgment step of deleting the second predicted motion vector candidate from Le candidate list, the predicted motion vector candidate number a predetermined number of list predicted motion vector candidates registered in the (natural number of 2 or more) than If the number of motion vector predictor candidates is smaller, the motion vector predictor candidate restriction step of registering motion vector predictor candidates having the same value in the motion vector predictor candidate list repeatedly until the number of motion vector predictor candidates reaches a predetermined number; And a prediction motion vector selection step of selecting a prediction motion vector of the block to be encoded, and an encoding step of encoding information indicating an index of the prediction motion vector to be selected in the prediction motion vector candidate list.
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。 It should be noted that any combination of the above-described constituent elements and a conversion of the expression of the present invention between a method, an apparatus, a system, a recording medium, a computer program, etc. are also effective as an aspect of the present invention.
本発明によれば、複数の予測動きベクトルを算出し、それら複数の予測動きベクトルの中から最適な予測動きベクトルを選択し、差分動きベクトルの発生符号量を削減させて、符号化効率を向上させることができる。 According to the present invention, a plurality of prediction motion vectors are calculated, an optimal prediction motion vector is selected from the plurality of prediction motion vectors, and the amount of generated code of the difference motion vector is reduced, thereby improving the encoding efficiency. Can be made.
本実施の形態では、動画像の符号化に関し、特にピクチャを任意のサイズ、形状の矩形ブロックに分割し、ピクチャ間でブロック単位に動き補償を行う動画像符号化における符号化効率を向上させる為に、符号化済みの周囲のブロックの動きベクトルから複数の予測動きベクトルを算出し、符号化対象のブロックの動きベクトルと選択された予測動きベクトルとの差分ベクトルを算出して符号化することによって符号量を削減する。あるいは、符号化済みの周囲のブロックの符号化情報を利用することにより、符号化対象ブロックの符号化情報を推定することによって符号量を削減する。また、動画像の復号の場合は、復号済みの周囲のブロックの動きベクトルから複数の予測動きベクトルを算出し、符号化ストリームから復号された差分ベクトルと選択された予測動きベクトルとから復号対象のブロックの動きベクトルを算出して復号する。あるいは、復号済みの周囲のブロックの符号化情報を利用することにより、復号対象ブロックの符号化情報を推定する。 In the present embodiment, with regard to moving picture coding, in particular, to improve coding efficiency in moving picture coding in which a picture is divided into rectangular blocks of an arbitrary size and shape and motion compensation is performed in units of blocks between pictures. In addition, by calculating a plurality of predicted motion vectors from the motion vectors of the surrounding blocks that have been encoded, and calculating and encoding a difference vector between the motion vector of the block to be encoded and the selected predicted motion vector Reduce the amount of code. Alternatively, the amount of code is reduced by estimating the encoding information of the encoding target block by using the encoding information of the surrounding blocks that have already been encoded. Also, in the case of decoding a moving image, a plurality of predicted motion vectors are calculated from the motion vectors of the peripheral blocks that have been decoded, and a decoding target is calculated from the difference vector decoded from the encoded stream and the selected predicted motion vector. The motion vector of the block is calculated and decoded. Alternatively, the encoding information of the decoding target block is estimated by using the encoding information of the peripheral blocks that have been decoded.
まず、本実施の形態において使用する技術、及び技術用語を定義する。 First, techniques used in the present embodiment and technical terms are defined.
(ツリーブロック、符号化ブロックについて)
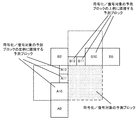
実施の形態では、図3に示されるように、ピクチャ内を任意の同一サイズの正方の矩形の単位にて均等分割する。この単位をツリーブロックと定義し、ピクチャ内での符号化または復号対象ブロック(符号化処理においては符号化対象ブロック、復号処理においては復号対象ブロックのことである。以下、断りのない限り、この意味で用いる。)を特定するためのアドレス管理の基本単位とする。モノクロを除きツリーブロックは1つの輝度信号と2つの色差信号で構成される。ツリーブロックのサイズはピクチャサイズやピクチャ内のテクスチャに応じて、2のべき乗のサイズで自由に設定することができる。ツリーブロックはピクチャ内のテクスチャに応じて、符号化処理を最適にすべく、必要に応じてツリーブロック内の輝度信号、及び色差信号を階層的に4分割(縦横に2分割ずつ)して、ブロックサイズの小さいブロックにすることができる。このブロックをそれぞれ符号化ブロックと定義し、符号化及び復号を行う際の処理の基本単位とする。モノクロを除き符号化ブロックも1つの輝度信号と2つの色差信号で構成される。符号化ブロックの最大サイズはツリーブロックのサイズと同一である。符号化ブロックの最小のサイズとなる符号化ブロックを最小符号化ブロックと呼び、2のべき乗のサイズで自由に設定することができる。
(About tree blocks and coding blocks)
In the embodiment, as shown in FIG. 3, the picture is equally divided into square units of any same size. This unit is defined as a tree block, and is a block to be encoded or decoded in a picture (a block to be encoded in the encoding process and a block to be decoded in the decoding process. Hereinafter, unless otherwise noted, It is used as a basic unit of address management for specifying. Except for monochrome, the tree block is composed of one luminance signal and two color difference signals. The size of the tree block can be freely set to a power of 2 depending on the picture size and the texture in the picture. In order to optimize the encoding process according to the texture in the picture, the tree block divides the luminance signal and chrominance signal in the tree block hierarchically into four parts (two parts vertically and horizontally) as necessary, The block can be made smaller in block size. Each block is defined as a coding block, and is a basic unit of processing when performing coding and decoding. Except for monochrome, the coding block is also composed of one luminance signal and two color difference signals. The maximum size of the coding block is the same as the size of the tree block. An encoded block having the minimum size of the encoded block is called a minimum encoded block, and can be freely set to a power of 2.
図3においては、符号化ブロックAは、ツリーブロックを分割せず、1つの符号化ブロックとしたものである。符号化ブロックBは、ツリーブロックを4分割してできた符号化ブロックである。符号化ブロックCは、ツリーブロックを4分割してできたブロックをさらに4分割してできた符号化ブロックである。符号化ブロックDは、ツリーブロックを4分割してできたブロックをさらに階層的に2度4分割してできた符号化ブロックであり、最小サイズの符号化ブロックである。 In FIG. 3, the encoding block A is a single encoding block without dividing the tree block. The encoding block B is an encoding block formed by dividing a tree block into four. The coding block C is a coding block obtained by further dividing the block obtained by dividing the tree block into four. The coding block D is a coding block obtained by further dividing the block obtained by dividing the tree block into four parts and further dividing the block into four hierarchically, and is a coding block of the minimum size.
(予測モードについて)
符号化ブロック単位で、復号済みの周囲の画像信号から予測を行うイントラ予測(MODE_INTRA)、及び復号済みのピクチャの画像信号から予測を行うインター予測(MODE_INTER)を切り替える。このイントラ予測(MODE_INTRA)とインター予測(MODE_INTER)を識別するモードを予測モード(PredMode)と定義する。予測モード(PredMode)はイントラ予測(MODE_INTRA)、またはインター予測(MODE_INTER)を値として持ち、選択して符号化できる。
(About prediction mode)
For each coding block, switching is performed between intra prediction (MODE_INTRA) in which prediction is performed from a decoded surrounding image signal and inter prediction (MODE_INTER) in which prediction is performed from an image signal of a decoded picture. A mode for identifying the intra prediction (MODE_INTRA) and the inter prediction (MODE_INTER) is defined as a prediction mode (PredMode). The prediction mode (PredMode) has intra prediction (MODE_INTRA) or inter prediction (MODE_INTER) as a value, and can be selected and encoded.
(分割モード、予測ブロック、予測ユニットについて)
ピクチャ内をブロックに分割してイントラ予測(MODE_INTRA)及びインター予測(MODE_INTER)を行う場合、イントラ予測及びインター予測の方法を切り替える単位をより小さくするために、必要に応じて符号化ブロックを分割して予測を行う。この符号化ブロックの輝度信号と色差信号の分割方法を識別するモードを分割モード(PartMode)と定義する。さらに、この分割されたブロックを予測ブロックと定義する。図4に示すように、符号化ブロックの輝度信号の分割方法に応じて4種類の分割モード(PartMode)を定義する。符号化ブロックの輝度信号を分割せず1つの予測ブロックとみなしたもの(図4(a))の分割モード(PartMode)を2N×2N分割(PART_2Nx2N)、符号化ブロックの輝度信号を水平方向に2分割し、2つの予測ブロックとしたもの(図4(b))の分割モード(PartMode)を2N×N分割(PART_2NxN)、符号化ブロックの輝度信号を垂直方向に分割し、符号化ブロックを2つの予測ブロックとしたもの(図4(c))の分割モード(PartMode)をN×2N分割(PART_Nx2N)、符号化ブロックの輝度信号を水平と垂直の均等分割により4つの予測ブロックとしたもの(図4(d))の分割モード(PartMode)をN×N分割(PART_NxN)とそれぞれ定義する。なお、イントラ予測(MODE_INTRA)のN×N分割(PART_NxN)を除き、各分割モード(PartMode)毎に輝度信号の縦横の分割比率と同様に色差信号も分割する。
(About split mode, prediction block, prediction unit)
When performing intra prediction (MODE_INTRA) and inter prediction (MODE_INTER) by dividing the picture into blocks, the coded block is divided as necessary to reduce the unit for switching the intra prediction and inter prediction methods. Make predictions. A mode for identifying the division method of the luminance signal and the color difference signal of the coding block is defined as a division mode (PartMode). Furthermore, this divided block is defined as a prediction block. As shown in FIG. 4, four types of partition modes (PartMode) are defined according to the method of dividing the luminance signal of the coding block. The division mode (PartMode) of what is regarded as one prediction block without dividing the luminance signal of the coding block (FIG. 4A) is 2N × 2N division (PART_2Nx2N), and the luminance signal of the coding block is horizontally The division mode (PartMode) of the two prediction blocks (FIG. 4B) is divided into 2N × N divisions (PART_2NxN), the luminance signal of the encoded block is divided in the vertical direction, and the encoded block is The partition mode (PartMode) of the two prediction blocks (FIG. 4 (c)) is N × 2N partition (PART_Nx2N), and the luminance signal of the encoded block is divided into four prediction blocks by horizontal and vertical equal partitioning. The division mode (PartMode) in FIG. 4D is defined as N × N division (PART_NxN). Except for N × N division (PART_NxN) of intra prediction (MODE_INTRA), the color difference signal is also divided for each division mode (PartMode) in the same manner as the vertical / horizontal division ratio of the luminance signal.
符号化ブロック内部において、各予測ブロックを特定する為に、0から開始する番号を、符号化順序で、符号化ブロック内部に存在する予測ブロックに対して割り当てる。この番号を分割インデックスPartIdxと定義する。図4の符号化ブロックの各予測ブロックの中に記述された数字は、その予測ブロックの分割インデックスPartIdxを表す。図4(b)に示す2N×N分割(PART_2NxN)では上の予測ブロックの分割インデックスPartIdxを0とし、下の予測ブロックの分割インデックスPartIdxを1とする。図4(c)に示すN×2N分割(PART_Nx2N)では左の予測ブロックの分割インデックスPartIdxを0とし、右の予測ブロックの分割インデックスPartIdxを1とする。図4(d)に示すN×N分割(PART_NxN)では、左上の予測ブロックの分割インデックスPartIdxを0とし、右上の予測ブロックの分割インデックスPartIdxを1とし、左下の予測ブロックの分割インデックスPartIdxを2とし、右下の予測ブロックの分割インデックスPartIdxを3とする。 In order to specify each prediction block within the coding block, a number starting from 0 is assigned to the prediction block existing inside the coding block in the coding order. This number is defined as a split index PartIdx. A number described in each prediction block of the encoded block in FIG. 4 represents a partition index PartIdx of the prediction block. In the 2N × N division (PART_2NxN) shown in FIG. 4B, the division index PartIdx of the upper prediction block is set to 0, and the division index PartIdx of the lower prediction block is set to 1. In the N × 2N division (PART_Nx2N) shown in FIG. 4C, the division index PartIdx of the left prediction block is set to 0, and the division index PartIdx of the right prediction block is set to 1. In the N × N partition (PART_NxN) shown in FIG. 4D, the partition index PartIdx of the upper left prediction block is 0, the partition index PartIdx of the upper right prediction block is 1, and the partition index PartIdx of the lower left prediction block is 2. And the division index PartIdx of the prediction block at the lower right is set to 3.
予測モード(PredMode)がインター予測(MODE_INTER)では、最小の符号化ブロックである符号化ブロックD以外では、分割モード(PartMode)は2N×2N分割(PART_2Nx2N)、2N×N分割(PART_2NxN)、及びN×2N分割(PART_Nx2N)を定義し、最小の符号化ブロックである符号化ブロックDのみ、分割モード(PartMode)は2N×2N分割(PART_2Nx2N)、2N×N分割(PART_2NxN)、及びN×2N分割(PART_Nx2N)に加えてN×N分割(PART_NxN)を定義する。なお、最小の符号化ブロック以外にN×N分割(PART_NxN)を定義しない理由は最小の符号化ブロック以外では、符号化ブロックを4分割して小さな符号化ブロックを表現できるからである。 When the prediction mode (PredMode) is inter prediction (MODE_INTER), except for the coding block D which is the smallest coding block, the partition mode (PartMode) is 2N × 2N partition (PART_2Nx2N), 2N × N partition (PART_2NxN), and N × 2N partition (PART_Nx2N) is defined, and only the coding block D which is the smallest coding block, the partition mode (PartMode) is 2N × 2N partition (PART_2Nx2N), 2N × N partition (PART_2NxN), and N × 2N In addition to the division (PART_Nx2N), N × N division (PART_NxN) is defined. The reason why N × N division (PART_NxN) is not defined other than the smallest coding block is that, except for the smallest coding block, the coding block can be divided into four to represent a small coding block.
(ツリーブロック、符号化ブロック、予測ブロック、変換ブロックの位置)
本実施の形態のツリーブロック、符号化ブロック、予測ブロック、変換ブロックを始めとする各ブロックの位置は、輝度信号の画面の一番左上の輝度信号の画素の位置を原点(0,0)とし、それぞれのブロックの領域に含まれる一番左上の輝度信号の画素の位置を(x,y)の二次元座標で表す。座標軸の向きは水平方向に右の方向、垂直方向に下の方向をそれぞれ正の向きとし、単位は輝度信号の1画素単位である。輝度信号と色差信号で画像サイズ(画素数)が同じである色差フォーマットが4:4:4の場合ではもちろんのこと、輝度信号と色差信号で画像サイズ(画素数)が異なる色差フォーマットが4:2:0、4:2:2の場合でも色差信号の各ブロックの位置をそのブロックの領域に含まれる輝度信号の画素の座標で表し、単位は輝度信号の1画素である。この様にすることで、色差信号の各ブロックの位置が特定できるのはもちろんのこと、座標の値を比較するだけで、輝度信号のブロックと色差信号のブロックの位置の関係も明確となる。
(Position of tree block, coding block, prediction block, transform block)
The position of each block including the tree block, the encoding block, the prediction block, and the transform block according to the present embodiment has the position of the pixel of the luminance signal at the upper left of the luminance signal screen as the origin (0, 0). The pixel position of the upper left luminance signal included in each block area is represented by two-dimensional coordinates (x, y). The direction of the coordinate axis is a right direction in the horizontal direction and a downward direction in the vertical direction, respectively, and the unit is one pixel unit of the luminance signal. Of course, the luminance signal and the color difference signal have the same image size (number of pixels) and the color difference format is 4: 4: 4. Of course, the luminance signal and the color difference signal have a different color size format of 4: 4. Even in the case of 2: 0, 4: 2: 2, the position of each block of the color difference signal is represented by the coordinates of the pixel of the luminance signal included in the block area, and the unit is one pixel of the luminance signal. In this way, not only can the position of each block of the color difference signal be specified, but also the relationship between the positions of the luminance signal block and the color difference signal block can be clarified only by comparing the coordinate values.
(予測ブロックグループについて)
複数の予測ブロックで構成されるグループを予測ブロックグループと定義する。図5、図6、図7及び図8は符号化または復号対象の予測ブロックと同一ピクチャ内でその符号化または復号対象の予測ブロックに隣接する予測ブロックグループを説明する図である。図9は符号化または復号対象の予測ブロックと時間的に異なる復号済みのピクチャにおいて、符号化または復号対象の予測ブロックと同一位置あるいはその近傍の位置に存在する既に符号化または復号済みの予測ブロックグループを説明する図である。図5、図6、図7、図8及び図9を用いて予測ブロックグループについて説明する。
(About prediction block groups)
A group composed of a plurality of prediction blocks is defined as a prediction block group. 5, 6, 7 and 8 are diagrams for explaining a prediction block group adjacent to a prediction block to be encoded or decoded in the same picture as the prediction block to be encoded or decoded. FIG. 9 shows a prediction block that has already been encoded or decoded and is present in a decoded picture that is temporally different from the prediction block to be encoded or decoded and is present at the same position as or near the prediction block to be encoded or decoded. It is a figure explaining a group. The prediction block group will be described with reference to FIGS. 5, 6, 7, 8, and 9.
図5に示すように、符号化または復号対象の予測ブロックと同一ピクチャ内でその符号化または復号対象の予測ブロックの左側の辺に隣接する予測ブロックA1、および符号化または復号対象の予測ブロックの左下の頂点に隣接する予測ブロックA0、で構成される第1の予測ブロックグループを左側に隣接する予測ブロックグループと定義する。 As shown in FIG. 5, the prediction block A1 adjacent to the left side of the prediction block to be encoded or decoded in the same picture as the prediction block to be encoded or decoded and the prediction block to be encoded or decoded A first prediction block group including a prediction block A0 adjacent to the lower left vertex is defined as a prediction block group adjacent to the left side.
なお、図6に示すように、符号化または復号対象の予測ブロックの左側に隣接する予測ブロックのサイズが符号化または復号対象の予測ブロックより大きい場合にも、前記条件に従い、左側に隣接する予測ブロックAがその符号化または復号対象の予測ブロックの左側の辺に隣接していれば予測ブロックA1とし、符号化または復号対象の予測ブロックの左下の頂点に隣接していれば予測ブロックA0とする。図6の例では、予測ブロックA0と予測ブロックA1は同一の予測ブロックとなる。 In addition, as shown in FIG. 6, even when the size of the prediction block adjacent to the left side of the prediction block to be encoded or decoded is larger than the prediction block to be encoded or decoded, the prediction adjacent to the left side according to the above condition. If the block A is adjacent to the left side of the prediction block to be encoded or decoded, the prediction block A1 is set. If the block A is adjacent to the lower left vertex of the prediction block to be encoded or decoded, the prediction block A0 is set. . In the example of FIG. 6, the prediction block A0 and the prediction block A1 are the same prediction block.
なお、図7に示すように、符号化または復号対象の予測ブロックの左側の辺に隣接する予測ブロックのサイズが符号化または復号対象の予測ブロックより小さく、複数存在する場合には、本実施の形態においては左側に隣接する予測ブロックの中で最も下の予測ブロックA10だけを左側に隣接する予測ブロックA1とする。 In addition, as shown in FIG. 7, when the size of the prediction block adjacent to the left side of the prediction block to be encoded or decoded is smaller than the prediction block to be encoded or decoded and there are a plurality of prediction blocks, this embodiment In the embodiment, only the lowest prediction block A10 among the prediction blocks adjacent to the left side is set as the prediction block A1 adjacent to the left side.
符号化または復号対象の予測ブロックと同一ピクチャ内でその符号化または復号対象の予測ブロックの上側の辺に隣接する予測ブロックB1、符号化または復号対象の予測ブロックの右上の頂点に隣接する予測ブロックB0、および符号化または復号対象の予測ブロックの左上の頂点に隣接する予測ブロックB2で構成される第2の予測ブロックグループを上側に隣接する予測ブロックグループと定義する。 A prediction block B1 adjacent to the upper side of the prediction block to be encoded or decoded in the same picture as the prediction block to be encoded or decoded, and a prediction block adjacent to the upper right vertex of the prediction block to be encoded or decoded A second prediction block group including B0 and a prediction block B2 adjacent to the upper left vertex of the prediction block to be encoded or decoded is defined as a prediction block group adjacent to the upper side.
なお、図8に示すように、符号化または復号対象の予測ブロックの上側に隣接する予測ブロックのサイズが符号化または復号対象の予測ブロックより大きい場合にも、前記条件に従い、上側に隣接する予測ブロックBがその符号化または復号対象の予測ブロックの上側の辺に隣接していれば予測ブロックB1とし、符号化または復号対象の予測ブロックの右上の頂点に隣接していれば予測ブロックB0とし、符号化または復号対象の予測ブロックの左上の頂点に隣接していれば予測ブロックB2とする。図8の例では、予測ブロックB0と予測ブロックB1と予測ブロックB2は同一の予測ブロックとなる。 In addition, as shown in FIG. 8, even when the size of the prediction block adjacent to the upper side of the prediction block to be encoded or decoded is larger than the prediction block to be encoded or decoded, the prediction adjacent to the upper side is also performed according to the above condition. If the block B is adjacent to the upper side of the prediction block to be encoded or decoded, the prediction block B1; if the block B is adjacent to the upper right vertex of the prediction block to be encoded or decoded, the prediction block B0; If it is adjacent to the top left vertex of the prediction block to be encoded or decoded, the prediction block is B2. In the example of FIG. 8, the prediction block B0, the prediction block B1, and the prediction block B2 are the same prediction block.
なお、図7に示すように、符号化または復号対象の予測ブロックの上側の辺に隣接する予測ブロックのサイズが符号化または復号対象の予測ブロックより小さく、複数存在する場合には、実施の形態においては上側に隣接する予測ブロックの中で最も右の予測ブロックB10だけを上側に隣接する予測ブロックB1とする。 As shown in FIG. 7, when the size of the prediction block adjacent to the upper side of the prediction block to be encoded or decoded is smaller than that of the prediction block to be encoded or decoded and there are a plurality of prediction blocks, the embodiment In FIG. 4, only the rightmost prediction block B10 among the prediction blocks adjacent on the upper side is set as the prediction block B1 adjacent on the upper side.
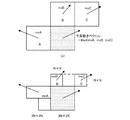
図9に示すように、符号化または復号対象の予測ブロックと時間的に異なる符号化または復号済みのピクチャにおいて、符号化または復号対象の予測ブロックと同一位置あるいはその近傍の位置に存在する既に符号化または復号済みの予測ブロックグループT0およびT1で構成される第3の予測ブロックグループを異なる時間の予測ブロックグループと定義する。 As shown in FIG. 9, in a picture that has been encoded or decoded that is temporally different from a prediction block to be encoded or decoded, an existing code that exists at the same position as or near the prediction block to be encoded or decoded A third prediction block group composed of the predicted or decoded prediction block groups T0 and T1 is defined as a prediction block group at different times.
(インター予測モード、参照リストについて)
本発明の実施の形態においては、復号済みのピクチャの画像信号から予測を行うインター予測では、複数の復号済みのピクチャを参照ピクチャとして用いることができる。複数の参照ピクチャから選択された参照ピクチャを特定するため、予測ブロック毎に参照インデックスを付ける。Bスライスでは予測ブロック毎に任意の2枚の参照ピクチャを選択してインター予測ことができ、インター予測モードとしてL0予測(Pred_L0)、L1予測(Pred_L1)、双予測(Pred_BI)がある。参照ピクチャはリスト構造のL0(参照リスト0)とL1(参照リスト1)で管理され、L0またはL1の参照インデックスを指定することにより参照ピクチャを特定することができる。L0予測(Pred_L0)はL0で管理されている参照ピクチャを参照するインター予測であり、L1予測(Pred_L1)はL1で管理されている参照ピクチャを参照するインター予測であり、双予測(Pred_BI)はL0予測とL1予測が共に行われ、L0とL1のそれぞれで管理されている1つずつの参照ピクチャを参照するインター予測である。Pスライスのインター予測ではL0予測のみが使用でき、Bスライスのインター予測ではL0予測、L1予測、L0予測とL1予測を平均または重み付け加算する双予測(Pred_BI)が使用できる。以降の処理において出力に添え字LX(Xは0または1)が付いている定数、変数に関しては、L0、L1ごとに処理が行われることを前提とする。
(Inter prediction mode, reference list)
In the embodiment of the present invention, in inter prediction in which prediction is performed from an image signal of a decoded picture, a plurality of decoded pictures can be used as reference pictures. In order to identify a reference picture selected from a plurality of reference pictures, a reference index is attached to each prediction block. In the B slice, any two reference pictures can be selected for each prediction block and inter prediction can be performed. As inter prediction modes, there are L0 prediction (Pred_L0), L1 prediction (Pred_L1), and bi-prediction (Pred_BI). The reference picture is managed by L0 (reference list 0) and L1 (reference list 1) of the list structure, and the reference picture can be specified by specifying the reference index of L0 or L1. L0 prediction (Pred_L0) is inter prediction that refers to a reference picture managed in L0, L1 prediction (Pred_L1) is inter prediction that refers to a reference picture managed in L1, and bi-prediction (Pred_BI) is This is inter prediction in which both L0 prediction and L1 prediction are performed and one reference picture managed by each of L0 and L1 is referred to. Only L0 prediction can be used in inter prediction of P slice, and L0 prediction, L1 prediction, and bi-prediction (Pred_BI) that averages or weights and adds L0 prediction and L1 prediction can be used in inter prediction of B slice. In the subsequent processing, regarding constants and variables with subscript LX (X is 0 or 1) in the output, it is assumed that processing is performed for each of L0 and L1.
(POCについて)
POCは符号化されるピクチャに関連付けられる変数とし、ピクチャの出力順序で1ずつ増加する値が設定される。POCの値によって、同じピクチャであるかを判別したり、出力順序でのピクチャ間の前後関係を判別したり、ピクチャ間の距離を導出したりすることができる。例えば、2つのピクチャのPOCが同じ値を持つ場合、同一のピクチャであると判断できる。2つのピクチャのPOCが違う値を持つ場合、POCの値が小さいピクチャのほうが、時間的に先に出力されるピクチャであると判断でき、2つのピクチャのPOCの差が時間軸方向でのピクチャ間距離を示す。
(About POC)
POC is a variable associated with the picture to be encoded, and is set to a value that increases by 1 in the picture output order. Based on the POC value, it is possible to determine whether they are the same picture, to determine the anteroposterior relationship between pictures in the output order, or to derive the distance between pictures. For example, if the POCs of two pictures have the same value, it can be determined that they are the same picture. When the POCs of two pictures have different values, it can be determined that a picture with a smaller POC value is a picture that is output earlier in time, and the difference between the POCs of the two pictures is a picture in the time axis direction. Indicates the distance.
以下、図面と共に本発明の実施の形態を説明する。図1は本発明の実施の形態に係る動画像符号化装置の構成を示すブロック図である。実施の形態の動画像符号化装置は、画像メモリ101、動きベクトル検出部102、差分動きベクトル算出部103、インター予測情報推定部104、動き補償予測部105、予測方法決定部106、残差信号生成部107、直交変換・量子化部108、第1の符号化ビット列生成部109、第2の符号化ビット列生成部110、多重化部111、逆量子化・逆直交変換部112、復号画像信号重畳部113、符号化情報格納メモリ114、および復号画像メモリ115を備える。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. FIG. 1 is a block diagram showing a configuration of a moving picture coding apparatus according to an embodiment of the present invention. The moving image encoding apparatus according to the embodiment includes an image memory 101, a motion
画像メモリ101は、撮影/表示時間順に供給された符号化対象のピクチャの画像信号を一時格納する。画像メモリ101は、格納された符号化対象のピクチャの画像信号を、所定の画素ブロック単位で、動きベクトル検出部102、予測方法決定部106、および残差信号生成部107に供給する。その際、撮影/表示時間順に格納されたピクチャの画像信号は、符号化順序に並べ替えられて、画素ブロック単位で、画像メモリ101から出力される。
The image memory 101 temporarily stores the image signal of the encoding target picture supplied in the order of shooting / display time. The image memory 101 supplies the stored image signal of the picture to be encoded to the motion
動きベクトル検出部102は、画像メモリ101から供給される画像信号と復号画像メモリ115から供給される参照ピクチャ間でブロックマッチング等により各予測ブロックサイズ、各予測モードのそれぞれの動きベクトルを各予測ブロック単位で検出し、検出された動きベクトルを動き補償予測部105、差分動きベクトル算出部103、および予測方法決定部106に供給する。
The motion
差分動きベクトル算出部103は、符号化情報格納メモリ114に記憶されている既に符号化された画像信号の符号化情報を用いて、複数の予測動きベクトルの候補を算出して後述する予測動きベクトルリストに登録し、予測動きベクトルリストに登録された複数の予測動きベクトルの候補の中から最適な予測動きベクトルを選択し、動きベクトル検出部102が検出した動きベクトルと予測動きベクトルから差分動きベクトルを算出し、算出された差分動きベクトルを予測方法決定部106に供給する。さらに、予測動きベクトルリストに登録された予測動きベクトルの候補から選択された予測動きベクトルを特定する予測動きベクトルインデックスを予測方法決定部106に供給する。差分動きベクトル算出部103の詳細な構成と動作は後述する。
The difference motion
インター予測情報推定部104は、マージモードのインター予測情報を推定する。マージモードとは、当該予測ブロックの予測モード、参照インデックス(参照リストに登録されている複数の参照ピクチャから動き補償予測に利用する参照ピクチャを特定するための情報)、動きベクトル等のインター予測情報を符号化するのではなく、符号化済みの隣接するインター予測された予測ブロック、あるいは異なるピクチャのインター予測された予測ブロックのインター予測情報を利用するモードである。符号化情報格納メモリ114に記憶されている既に符号化された予測ブロックの符号化情報を用いて、複数のマージの候補(インター予測情報の候補)を算出してマージ候補リストに登録し、マージ候補リストに登録された複数のマージ候補の中から最適なマージ候補を選択し、選択されたマージ候補の予測モード、参照インデックス、動きベクトル等のインター予測情報を動き補償予測部105に供給するとともに、選択されたマージ候補を特定するマージインデックスを予測方法決定部106に供給する。
The inter prediction
動き補償予測部105は、動きベクトル検出部102およびインター予測情報推定部104により検出された動きベクトルを用いて参照ピクチャから動き補償予測により予測画像信号を生成し、予測画像信号を予測方法決定部106に供給する。なお、L0予測、及びL1予測では、片方向の予測を行う。双予測(Pred_BI)の場合は、双方向の予測を行い、L0予測、L1予測のそれぞれのインター予測された信号に適応的に重み係数を掛け算し、オフセット値を加算して重畳し、最終的な予測画像信号を生成する。
The motion
予測方法決定部106は差分動きベクトルの符号量、予測画像信号と画像信号との間の歪量等を評価することにより、複数の予測方法の中から、最適な符号化ブロック単位でインター予測(PRED_INTER)かイントラ予測(PRED_INTRA)かを判別する予測モードPredMode、分割モードPartModeを決定し、インター予測(PRED_INTER)では予測ブロック単位でマージモードか否か等の予測方法を決定し、マージモードの場合はマージインデックス、マージモードでない場合はインター予測フラグ、予測動きベクトルインデックス、L0、L1の参照インデックス、差分動きベクトル等を決定して、決定に応じた符号化情報を第1の符号化ビット列生成部109に供給する。
The prediction
さらに、予測方法決定部106は、決定された予測方法を示す情報、及び決定された予測方法に応じた動きベクトル等を含む符号化情報を符号化情報格納メモリ114に格納する。ここで格納する符号化情報は、予測モードPredMode、分割モードPartMode、L0予測、及びL1予測を利用するかどうかを示すフラグpredFlagL0, predFlagL1、L0、L1の参照インデックスrefIdxL0, refIdxL1、L0、L1の動きベクトルmvL0, mvL1等である。ここで、予測モードPredModeがイントラ予測(PRED_INTRA)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0、L1予測を利用するかどうかを示すフラグpredFlagL1は共に0である。一方、予測モードPredModeがインター予測(MODE_INTER)で、インター予測モードがL0予測(Pred_L0)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0は1, L1予測を利用するかどうかを示すフラグpredFlagL1は0である。インター予測モードがL1予測(Pred_L1)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0は0, L1予測を利用するかどうかを示すフラグpredFlagL1は1である。インター予測モードが双予測(Pred_BI)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0、L1予測を利用するかどうかを示すフラグpredFlagL1は共に1である。予測方法決定部106は、決定された予測モードに応じた予測画像信号を残差信号生成部107と復号画像信号重畳部113に供給する。
Further, the prediction
残差信号生成部107は、符号化する画像信号と予測画像信号との減算を行うことにより残差信号を生成し、直交変換・量子化部108に供給する。
The residual
直交変換・量子化部108は、残差信号に対して量子化パラメータに応じて直交変換及び量子化を行い直交変換・量子化された残差信号を生成し、第2の符号化ビット列生成部110と逆量子化・逆直交変換部112に供給する。さらに、直交変換・量子化部108は、量子化パラメータを符号化情報格納メモリ114に格納する。
The orthogonal transform /
第1の符号化ビット列生成部109は、シーケンス、ピクチャ、スライス、符号化ブロック単位の情報に加えて、符号化ブロック及び予測ブロック毎に予測方法決定部106によって決定された予測方法に応じた符号化情報を符号化する。具体的には、符号化ブロック毎の予測モードPredModeがインター予測(PRED_INTER)の場合、マージモードかどうかを判別するフラグ、マージモードの場合はマージインデックス、マージモードでない場合はインター予測モード、参照インデックス、予測動きベクトルインデックス、差分動きベクトルに関する情報等の符号化情報を後述する規定のシンタックス規則に従って符号化して第1の符号化ビット列を生成し、多重化部111に供給する。なお、予測動きベクトルリストに登録される予測動きベクトルの候補数が1の場合、予測動きベクトルインデックスmvp_idxは0と特定できるので、符号化しない。本実施の形態においては、後述するように符号化対象の予測ブロックのサイズに応じて、予測動きベクトルの候補数が設定される。そこで、第1の符号化ビット列生成部109では、符号化対象の予測ブロックのサイズに応じて、予測動きベクトルの候補数を設定し、設定された候補数が1より大きい場合に予測動きベクトルインデックスを符号化する。
The first encoded bit
第2の符号化ビット列生成部110は、直交変換及び量子化された残差信号を規定のシンタックス規則に従ってエントロピー符号化して第2の符号化ビット列を生成し、多重化部111に供給する。多重化部111で、第1の符号化ビット列と第2の符号化ビット列を規定のシンタックス規則に従って多重化し、ビットストリームを出力する。
The second encoded bit
逆量子化・逆直交変換部112は、直交変換・量子化部108から供給された直交変換・量子化された残差信号を逆量子化及び逆直交変換して残差信号を算出し、復号画像信号重畳部113に供給する。復号画像信号重畳部113は、予測方法決定部106による決定に応じた予測画像信号と逆量子化・逆直交変換部112で逆量子化及び逆直交変換された残差信号を重畳して復号画像を生成し、復号画像メモリ115に格納する。なお、復号画像に対して符号化によるブロック歪等の歪を減少させるフィルタリング処理を施して、復号画像メモリ115に格納されることもある。
The inverse quantization / inverse
図2は図1の動画像符号化装置に対応した本発明の実施の形態に係る動画像復号装置の構成を示すブロックである。実施の形態の動画像復号装置は、分離部201、第1符号化ビット列復号部202、第2符号化ビット列復号部203、動きベクトル算出部204、インター予測情報推定部205、動き補償予測部206、逆量子化・逆直交変換部207、復号画像信号重畳部208、符号化情報格納メモリ209、および復号画像メモリ210を備える。
FIG. 2 is a block diagram showing the configuration of the moving picture decoding apparatus according to the embodiment of the present invention corresponding to the moving picture encoding apparatus of FIG. The moving picture decoding apparatus according to the embodiment includes a
図2の動画像復号装置の復号処理は、図1の動画像符号化装置の内部に設けられている復号処理に対応するものであるから、図2の動き補償予測部206、逆量子化・逆直交変換部207、復号画像信号重畳部208、符号化情報格納メモリ209、および復号画像メモリ210の各構成は、図1の動画像符号化装置の動き補償予測部105、逆量子化・逆直交変換部112、復号画像信号重畳部113、符号化情報格納メモリ114、および復号画像メモリ115の各構成とそれぞれ対応する機能を有する。
The decoding process of the moving picture decoding apparatus in FIG. 2 corresponds to the decoding process provided in the moving picture encoding apparatus in FIG. 1, so the motion
分離部201に供給されるビットストリームは規定のシンタックスの規則に従って分離し、分離された符号化ビット列が第1符号化ビット列復号部202、第2符号化ビット列復号部203に供給される。
The bit stream supplied to the
第1符号化ビット列復号部202は、供給された符号化ビット列を復号して、シーケンス、ピクチャ、スライス、符号化ブロック単位の情報、及び、予測ブロック単位の符号化情報を得る。具体的には、符号化ブロック単位でインター予測(PRED_INTER)かイントラ予測(PRED_INTRA)かを判別する予測モードPredMode、分割モードPartMode、インター予測(PRED_INTER)の場合、マージモードかどうかを判別するフラグ、マージモードの場合はマージインデックス、マージモードでない場合はインター予測モード、予測動きベクトルインデックス、差分動きベクトル等に関する符号化情報を後述する規定のシンタックス規則に従って復号し、符号化情報を動きベクトル算出部204またはインター予測情報推定部205に供給する。なお、マージモードでない場合、後述する予測動きベクトルリストに登録される予測動きベクトルの候補が1つの場合、予測動きベクトルインデックスは0と特定できるので、予測動きベクトルインデックスは符号化されておらず、予測動きベクトルインデックスを0とする。本実施の形態においては、後述するように復号対象の予測ブロックのサイズに応じて、予測動きベクトルの候補数が設定される。そこで、第1符号化ビット列復号部202では、復号対象の予測ブロックのサイズに応じて、予測動きベクトルの候補数を設定し、設定された候補数が1より大きい場合に予測動きベクトルインデックスを復号する。
The first encoded bit
第2符号化ビット列復号部203は、供給された符号化ビット列を復号して直交変換・量子化された残差信号を算出し、直交変換・量子化された残差信号を逆量子化・逆直交変換部207に供給する。
The second encoded bit
動きベクトル算出部204は、復号対象の予測ブロックがマージモードでない時に、符号化情報格納メモリ209に記憶されている既に復号された画像信号の符号化情報を用いて、複数の予測動きベクトルの候補を算出して後述する予測動きベクトルリストに登録し、予測動きベクトルリストに登録された複数の予測動きベクトルの候補の中から、第1符号化ビット列復号部202で復号され供給される予測動きベクトルインデックスに応じた予測動きベクトルを選択し、第1符号化ビット列復号部202で復号された差分ベクトルと選択された予測動きベクトルから動きベクトルを算出し、他の符号化情報とともに動き補償予測部206に供給するとともに、符号化情報格納メモリ209に格納する。ここで供給・格納する予測ブロックの符号化情報は、予測モードPredMode、分割モードPartMode、L0予測、及びL1予測を利用するかどうかを示すフラグpredFlagL0, predFlagL1、L0、L1の参照インデックスrefIdxL0, refIdxL1、L0、L1の動きベクトルmvL0, mvL1等である。ここで、予測モードがイントラ予測(PRED_INTRA)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0、L1予測を利用するかどうかを示すフラグpredFlagL1は共に0である。一方、予測モードPredModeがインター予測(MODE_INTER)で、インター予測モードがL0予測(Pred_L0)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0は1, L1予測を利用するかどうかを示すフラグpredFlagL1は0である。インター予測モードがL1予測(Pred_L1)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0は0, L1予測を利用するかどうかを示すフラグpredFlagL1は1である。インター予測モードが双予測(Pred_BI)の場合、L0予測を利用するかどうかを示すフラグpredFlagL0、L1予測を利用するかどうかを示すフラグpredFlagL1は共に1である。動きベクトル算出部204の詳細な構成と動作は後述する。
When the prediction block to be decoded is not in the merge mode, the motion
インター予測情報推定部205は、復号対象の予測ブロックがマージモードの時に、マージモードのインター予測情報を推定する。符号化情報格納メモリ114に記憶されている既に復号された予測ブロックの符号化情報を用いて、複数のマージの候補を算出してマージ候補リストに登録し、マージ候補リストに登録された複数のマージ候補の中から第1符号化ビット列復号部202で復号され供給されるマージインデックスに対応したマージ候補を選択し、選択されたマージ候補の予測モードPredMode、分割モードPartMode、L0予測、及びL1予測を利用するかどうかを示すフラグpredFlagL0, predFlagL1、L0、L1の参照インデックスrefIdxL0, refIdxL1、L0、L1の動きベクトルmvL0, mvL1等のインター予測情報を動き補償予測部206に供給するとともに、符号化情報格納メモリ209に格納する。
The inter prediction
動き補償予測部206は、動きベクトル算出部204で算出された動きベクトルを用いて参照ピクチャから動き補償予測により予測画像信号を生成し、予測画像信号を復号画像信号重畳部208に供給する。なお、双予測(Pred_BI)の場合は、L0予測、L1予測の2つの動き補償予測画像信号に適応的に重み係数を掛け算して重畳し、最終的な予測画像信号を生成する。
The motion
逆量子化・逆直交変換部207は、第1符号化ビット列復号部202で復号された直交変換・量子化された残差信号に対して逆直交変換及び逆量子化を行い、逆直交変換・逆量子化された残差信号を得る。
The inverse quantization / inverse
復号画像信号重畳部208は、動き補償予測部206で動き補償予測された予測画像信号と、逆量子化・逆直交変換部207により逆直交変換・逆量子化された残差信号とを重畳することにより、復号画像信号を復号し、復号画像メモリ210に格納する。復号画像メモリ210に格納する際には、復号画像に対して符号化によるブロック歪等を減少させるフィルタリング処理を施して、復号画像メモリ210に格納されることもある。
The decoded image
(シンタックスについて)
次に、本実施の形態に係る動きベクトルの予測方法を備える動画像符号化装置により符号化され、復号装置により復号される動画像のビットストリームの符号化および復号の共通規則であるシンタックスについて説明する。
(About syntax)
Next, a syntax that is a common rule for encoding and decoding a bit stream of a moving image that is encoded by a moving image encoding device including the motion vector prediction method according to the present embodiment and decoded by the decoding device explain.
図10は本実施の形態により生成されるビットストリームのスライス単位でスライスヘッダーに記述される第1のシンタックス構造を示す。ただし、本実施の形態に関係のあるシンタックス要素のみを示している。スライスタイプがBの場合は、時間方向の予測動きベクトルの候補、またはマージ候補を算出する際に用いる異なる時間のピクチャcolPicが処理対象の予測ブロックが含まれるピクチャのL0の参照リスト或いはL1の参照リストのどちらに登録されている参照ピクチャを使用するかを示すフラグcollocated_from_l0_flagが設置される。フラグcollocated_from_l0_flagの詳細については後述する。 FIG. 10 shows a first syntax structure described in the slice header in units of slices of the bitstream generated according to the present embodiment. However, only syntax elements relevant to the present embodiment are shown. When the slice type is B, a picture colPic at a different time used when calculating a motion vector prediction candidate or merge candidate in the temporal direction is a reference list of L0 or a reference of L1 of a picture including a prediction block to be processed. A flag collocated_from_l0_flag indicating which reference picture registered in which list is used is set. Details of the flag collocated_from_l0_flag will be described later.
なお、以上のシンタックス要素はピクチャ単位で設定されるシンタックス要素を記述するピクチャ・パラメータ・セットに設置してもよい。 Note that the above syntax elements may be placed in a picture parameter set describing syntax elements set in units of pictures.
図11は予測ブロック単位に記述されるシンタックスパターンを示す。予測ブロックの予測モードPredModeの値がインター予測(MODE_INTER)の場合、マージモードかどうかを示すmerge_flag[x0][y0]が設置される。ここで、x0、y0は輝度信号のピクチャ内での予測ブロックの左上の画素の位置を示すインデックスであり、merge_flag[x0][y0]はピクチャ内の(x0, y0)に位置する予測ブロックのマージモードかどうかを示すフラグである。 FIG. 11 shows a syntax pattern described in units of prediction blocks. When the value of the prediction mode PredMode of the prediction block is inter prediction (MODE_INTER), merge_flag [x0] [y0] indicating whether the mode is the merge mode is set. Here, x0 and y0 are indices indicating the position of the upper left pixel of the prediction block in the picture of the luminance signal, and merge_flag [x0] [y0] is the prediction block located at (x0, y0) in the picture It is a flag indicating whether or not merge mode.
次に、merge_flag[x0][y0]が1の場合、マージモードであることを示し、参照するマージ候補のリストであるマージリストのインデックスのシンタックス要素merge_idx[x0][y0]が設置される。ここで、x0、y0はピクチャ内での予測ブロックの左上の画素の位置を示すインデックスであり、merge_idx[x0][y0]はピクチャ内の(x0, y0)に位置する予測ブロックのマージインデックスである。 Next, when merge_flag [x0] [y0] is 1, it indicates merge mode, and a merge list index syntax element merge_idx [x0] [y0] is set, which is a list of merge candidates to be referred to. . Here, x0 and y0 are indices indicating the position of the upper left pixel of the prediction block in the picture, and merge_idx [x0] [y0] is the merge index of the prediction block located at (x0, y0) in the picture. is there.
一方、merge_flag[x0][y0]が0の場合、マージモードでないことを示し、スライスタイプがBの場合、インター予測モードを識別するシンタックス要素inter_pred_flag[x0][y0]が設置され、このシンタックス要素でL0予測(Pred_L0)、L1予測(Pred_L1)、双予測(Pred_BI)を識別する。L0、L1ごとに、参照ピクチャを特定するための参照インデックスのシンタックス要素ref_idx_l0[x0][y0]、ref_idx_l1[x0][y0]、動きベクトル検出にて求められた予測ブロックの動きベクトルと予測動きベクトルとの差分である差分動きベクトルのシンタックス要素mvd_l0[x0][y0][j]、mvd_l1[x0][y0][j]が設置される。ここで、x0、y0はピクチャ内での予測ブロックの左上の画素の位置を示すインデックスであり、ref_idx_l0[x0][y0]、mvd_l0[x0][y0][j]はそれぞれピクチャ内の(x0, y0)に位置する予測ブロックのL0の参照インデックス、及び差分動きベクトルであり、ref_idx_l1[x0][y0]、mvd_l1[x0][y0][j]はそれぞれピクチャ内の(x0, y0)に位置する予測ブロックのL1の参照インデックス、及び差分動きベクトルである。また、jは差分動きベクトルの成分を表し、jが0はx成分を、jが1はy成分を表す。次に、符号化または復号対象の予測ブロックのサイズに応じて設定される差分動きベクトルの候補数が1より大きい場合に、参照する予測動きベクトルの候補のリストである予測動きベクトルリストのインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]が設置される。ここで、x0、y0はピクチャ内での予測ブロックの左上の画素の位置を示すインデックスであり、mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]はピクチャ内の (x0, y0)に位置する予測ブロックのL0、L1の予測動きベクトルインデックスである。関数NumMVPCand(LX)は、予測方向LX(Xは0或いは1)で予測ブロックの予測動きベクトルの候補の総数を算出する関数を表し、後述の符号化または復号対象の予測ブロックのサイズに応じて規定された最終候補数finalNumMVPCandと同じ値が設定される。図12は規定された予測動きベクトルの候補数毎の予測動きベクトルインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]のエントロピー符号の一例である。予測動きベクトルインデックスmvp_idx_lx[x0][y0]は動きベクトルの予測方法により予測動きベクトルの候補数NumMVPCand(LX)が1より大きい場合に符号化される。予測動きベクトルの候補の総数が1つであれば、その1つが予測動きベクトルとなるので、mvp_idx_lx[x0][y0]を伝送せずとも参照する予測動きベクトルの候補が確定する為である。予測動きベクトルの候補数NumMVPCand(LX)が2の場合、予測動きベクトルインデックスが0の時、予測動きベクトルインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]の符号は'0'となり、予測動きベクトルインデックスが1の時、予測動きベクトルインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]の符号は'1'となる。予測動きベクトルの候補数NumMVPCand(LX)が3の場合、予測動きベクトルインデックスが0の時、予測動きベクトルインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]の符号は'0'となり、予測動きベクトルインデックスが1の時、予測動きベクトルインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]の符号は'10'となり、予測動きベクトルインデックスが2の時、予測動きベクトルインデックスのシンタックス要素mvp_idx_l0[x0][y0]、mvp_idx_l1[x0][y0]の符号は'11'となる。本発明の実施の形態においては、符号化または復号対象の予測ブロックのサイズに応じて、予測動きベクトルの候補数が設定され、詳細については後述する。 On the other hand, when merge_flag [x0] [y0] is 0, this indicates that the mode is not merge mode. When the slice type is B, a syntax element inter_pred_flag [x0] [y0] for identifying the inter prediction mode is installed. The L0 prediction (Pred_L0), L1 prediction (Pred_L1), and bi-prediction (Pred_BI) are identified by the tax element. For each of L0 and L1, syntax elements ref_idx_l0 [x0] [y0] and ref_idx_l1 [x0] [y0] of the reference index for specifying the reference picture, the motion vector and prediction of the prediction block obtained by motion vector detection The differential motion vector syntax elements mvd_l0 [x0] [y0] [j] and mvd_l1 [x0] [y0] [j], which are the differences from the motion vector, are provided. Here, x0 and y0 are indexes indicating the position of the upper left pixel of the prediction block in the picture, and ref_idx_l0 [x0] [y0] and mvd_l0 [x0] [y0] [j] are respectively (x0 , y0) is the reference index of L0 of the prediction block and the differential motion vector, and ref_idx_l1 [x0] [y0] and mvd_l1 [x0] [y0] [j] are respectively (x0, y0) in the picture It is the reference index of L1 of the prediction block located, and a difference motion vector. Further, j represents a differential motion vector component, j represents 0 as an x component, and j represents 1 as a y component. Next, when the number of differential motion vector candidates set in accordance with the size of the prediction block to be encoded or decoded is larger than 1, the index of the prediction motion vector list that is a list of prediction motion vector candidates to be referred to Syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] are installed. Here, x0 and y0 are indices indicating the position of the upper left pixel of the prediction block in the picture, and mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] are (x0, y0) in the picture. It is the prediction motion vector index of L0 and L1 of the prediction block located. The function NumMVPCand (LX) represents a function for calculating the total number of prediction motion vector candidates of the prediction block in the prediction direction LX (X is 0 or 1), and depends on the size of the prediction block to be encoded or decoded, which will be described later. The same value as the defined final candidate number finalNumMVPCand is set. FIG. 12 is an example of entropy codes of the syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] of the predicted motion vector index for each number of defined predicted motion vector candidates. The predicted motion vector index mvp_idx_lx [x0] [y0] is encoded when the number of predicted motion vector candidates NumMVPCand (LX) is larger than 1 by the motion vector prediction method. This is because if the total number of motion vector predictor candidates is 1, one of the motion vector predictors is a motion vector predictor, so that the motion vector predictor candidate to be referred to is determined without transmitting mvp_idx_lx [x0] [y0]. When the number of predicted motion vector candidates NumMVPCand (LX) is 2, when the predicted motion vector index is 0, the signs of the syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] of the predicted motion vector index are When the predicted motion vector index is 1, the signs of the predicted motion vector index syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] are “1”. When the number of predicted motion vector candidates NumMVPCand (LX) is 3, when the predicted motion vector index is 0, the signs of the syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] of the predicted motion vector index are When the motion vector index is '0' and the motion vector index is 1, the code of the motion vector index syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] is '10' and the motion vector predictor index is In the case of 2, the signs of the syntax elements mvp_idx_l0 [x0] [y0] and mvp_idx_l1 [x0] [y0] of the motion vector predictor index are “11”. In the embodiment of the present invention, the number of motion vector predictor candidates is set according to the size of the prediction block to be encoded or decoded, and details will be described later.
実施の形態に係る動きベクトルの予測方法は、図1の動画像符号化装置の差分動きベクトル算出部103及び図2の動画像復号装置の動きベクトル算出部204において実施される。
The motion vector prediction method according to the embodiment is implemented in the difference motion
実施の形態による動きベクトルの予測方法を図面を用いて説明する。動きベクトルの予測方法は、符号化ブロックを構成する予測ブロック単位に、符号化及び復号の処理の何れでも実施される。予測ブロックの予測モードがインター予測(MODE_INTER)で、マージモードでない場合に、符号化の場合、符号化対象の動きベクトルから符号化する差分動きベクトルを算出する時に用いる符号化済みの動きベクトルを利用して予測動きベクトルを導出する際、復号の場合、復号対象の動きベクトルを算出する時に用いる復号済みの動きベクトルを利用して予測動きベクトルを導出する際に実施される。 A motion vector prediction method according to an embodiment will be described with reference to the drawings. The motion vector prediction method is performed in any of the encoding and decoding processes for each prediction block constituting the encoding block. When the prediction mode of the prediction block is inter prediction (MODE_INTER) and not the merge mode, in the case of encoding, the encoded motion vector used when calculating the differential motion vector to be encoded from the motion vector to be encoded is used. In the case of deriving the predicted motion vector, the decoding is performed when the predicted motion vector is derived using the decoded motion vector used when calculating the motion vector to be decoded.
(符号化における動きベクトルの予測)
上述のシンタックスに基づき、動画像のビットストリームを符号化する動画像符号化装置において、実施の形態に係る動きベクトルの予測方法の動作を説明する。動きベクトルの予測方法は、スライス単位で動き補償予測を行う場合、即ちスライスタイプがPスライス(片方向予測スライス)或いはBスライス(両方向予測スライス)の場合で、更に、スライスの中の予測ブロックの予測モードがインター予測(MODE_INTER)で、マージモードでない差分動きベクトルを符号化または復号する予測ブロックに適用される。
(Prediction of motion vector in encoding)
The operation of the motion vector prediction method according to the embodiment in the video encoding device that encodes a video bitstream based on the above-described syntax will be described. The motion vector prediction method is a method in which motion compensated prediction is performed in units of slices, that is, when the slice type is a P slice (unidirectional prediction slice) or a B slice (bidirectional prediction slice). The prediction mode is an inter prediction (MODE_INTER) and is applied to a prediction block that encodes or decodes a differential motion vector that is not a merge mode.
図13は、図1の動画像符号化装置の差分動きベクトル算出部103の詳細な構成を示す図である。図13の太枠線で囲まれる部分は差分動きベクトル算出部103を示している。
FIG. 13 is a diagram showing a detailed configuration of the differential motion
更に、その内部の太点線で囲まれる部分は後述する動きベクトルの予測方法の動作部を示しており、実施の形態の動画像符号化装置と対応する動画像復号装置にも同様に設置され、符号化と復号で矛盾しない同一の導出結果を得られるようにしている。以下、この図を用いて、符号化における動きベクトルの予測方法を説明する。 Further, the part surrounded by a thick dotted line inside thereof shows an operation unit of a motion vector prediction method described later, and is similarly installed in a video decoding device corresponding to the video encoding device of the embodiment, The same derivation result consistent with encoding and decoding is obtained. Hereinafter, a motion vector prediction method in encoding will be described with reference to FIG.
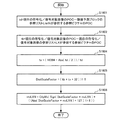
本実施の形態においては、符号化または復号対象の予測ブロックのサイズに応じて、予測動きベクトルの最終候補数finalNumMVPCandを設定する。差分動きベクトル算出部103では、符号化対象の輝度信号の予測ブロックのサイズが規定したサイズsizePUNumMVPCand以下の場合、finalNumMVPCandを後者よりも小さい数に設定し、そうでない場合、finalNumMVPCandを前者よりも大きい数に設定する。本実施の形態においては、規定するサイズsizePUNumMVPCandを8x8とし、符号化または復号対象の輝度信号の予測ブロックのサイズが規定したサイズsizePUNumMVPCand以下の場合は、finalNumMVPCandを1に設定し、それ以外の場合は、finalNumMVPCandを2に設定する。
In the present embodiment, the final number of predicted motion vectors finalNumMVPCand is set according to the size of the prediction block to be encoded or decoded. In the differential motion
予測ブロックのサイズが小さい場合、単位面積当たりの予測ブロックの数が多くなるので、後述する冗長な予測動きベクトルの候補を削除する処理、及び前述の予測動きベクトルインデックスを符号化する処理の回数が多くなってしまう。 When the size of the prediction block is small, the number of prediction blocks per unit area increases. Therefore, the number of processes for deleting the redundant motion vector predictor candidates described later and the process for encoding the motion vector predictor index described above are reduced. It will increase.
そこで、本実施の形態においては、符号化および復号対象の予測ブロックが規定したサイズ以下の場合、最終候補数finalNumMVPCandを1とし、冗長な予測動きベクトルの候補を削除する処理及び予測動きベクトルインデックスを符号化および復号する処理をスキップすることで、処理量を削減する。さらに、最終候補数finalNumMVPCandを1では、予測動きベクトルインデックスを符号化する必要がないので、エントロピー符号化の処理量を削減することができる。 Therefore, in the present embodiment, when the prediction block to be encoded and decoded is equal to or smaller than the specified size, the final candidate number finalNumMVPCand is set to 1, and the process of deleting redundant prediction motion vector candidates and the prediction motion vector index are By skipping the encoding and decoding processes, the amount of processing is reduced. Further, when the final candidate number finalNumMVPCand is 1, it is not necessary to encode the motion vector predictor index, so that it is possible to reduce the amount of entropy encoding processing.
差分動きベクトル算出部103は、予測動きベクトル候補生成部121、予測動きベクトル候補登録部122、予測動きベクトル冗長候補削除部123、予測動きベクトル候補数制限部124、予測動きベクトル候補符号量算出部125、予測動きベクトル選択部126、および動きベクトル減算部127を含む。
The difference motion
この差分動きベクトル算出部103での差分動きベクトル算出処理は、符号化対象ブロックで選択されたインター予測方法で用いる動きベクトルの差分動きベクトルをL0、L1毎にそれぞれ算出する。具体的には符号化対象ブロックの予測モードPredModeがインター予測(MODE_INTER)で、符号化対象ブロックのインター予測モードがL0予測(Pred_L0)の場合、L0の予測動きベクトルリストmvpListL0を算出して、予測動きベクトルmvpL0を選択し、L0の動きベクトルの差分動きベクトルmvdL0を算出する。符号化対象ブロックのインター予測モード(Pred_L1)がL1予測の場合、L1の予測動きベクトルリストmvpListL1を算出して、予測動きベクトルmvpL1を選択し、L1の動きベクトルの差分動きベクトルmvdL1を算出する。符号化対象ブロックのインター予測モードが双予測(Pred_BI)の場合、L0予測とL1予測が共に行われ、L0の予測動きベクトルリストmvpListL0を算出して、L0の予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0の差分動きベクトルmvdL0を算出するとともに、L1の予測動きベクトルリストmvpListL1を算出して、L1の予測動きベクトルmvpL1を算出し、L1の動きベクトルmvL1の差分動きベクトルmvdL1をそれぞれ算出する。
In the differential motion vector calculation processing in the differential motion
L0、L1それぞれについて、差分動きベクトル算出処理を行うが、L0、L1ともに共通の処理となる。したがって、以下の説明においてはL0、L1を共通のLXとして表す。L0の差分動きベクトルを算出する処理ではXが0であり、L1の差分動きベクトルを算出する処理ではXが1である。また、LXの差分動きベクトルを算出する処理中に、LXではなく、もう一方のリストの情報を参照する場合、もう一方のリストをLYとして表す。 Difference motion vector calculation processing is performed for each of L0 and L1, but both L0 and L1 are common processing. Therefore, in the following description, L0 and L1 are represented as a common LX. In the process of calculating the differential motion vector of L0, X is 0, and in the process of calculating the differential motion vector of L1, X is 1. Further, when referring to the information of the other list instead of LX during the process of calculating the differential motion vector of LX, the other list is represented as LY.
予測動きベクトル候補生成部121は、L0、L1毎に、上側に隣接する予測ブロックグループ(符号化対象の予測ブロックと同一ピクチャ内でその予測ブロックの左側に隣接する予測ブロックグループ:図5のA0,A1)、左側に隣接する予測ブロックグループ(符号化対象の予測ブロックと同一ピクチャ内でその予測ブロックの上側に隣接する予測ブロックグループ:図5のB0,B1,B2)、異なる時間の予測ブロックグループ(符号化対象の予測ブロックと時間的に異なるピクチャ内でその予測ブロックと同一位置あるいはその近傍の位置に存在する既に符号化済みの予測ブロックグループ:図9のT0,T1)の3つの予測ブロックグループから、予測ブロックグループごとに1つの動きベクトルmvLXA、mvLXB、mvLXColをそれぞれ導出して予測動きベクトル候補とし、予測動きベクトル候補登録部122に供給する。以下、mvLXA及びmvLXBを空間的な予測動きベクトル、mvLXColを時間的な予測動きベクトルと呼ぶ。この予測動きベクトル候補の算出に際しては、符号化情報格納メモリ114に格納されている符号化済みの予測ブロックの予測モード、参照リスト毎の参照インデックス、参照ピクチャのPOC、動きベクトル等の符号化情報を用いる。
For each of L0 and L1, the motion vector predictor
これらの予測動きベクトルの候補mvLXA、mvLXB、mvLXColは符号化または復号対象ピクチャ(符号化処理においては符号化対象ピクチャ、復号処理においては復号対象ピクチャのことである。以下、断りのない限り、この意味で用いる。)のPOCと参照ピクチャのPOCとの関係に応じてスケーリングすることにより導出されることもある。 These predicted motion vector candidates mvLXA, mvLXB, and mvLXCol are pictures to be encoded or decoded (the pictures to be encoded in the encoding process and the pictures to be decoded in the decoding process. Hereinafter, unless otherwise noted, It may be derived by scaling according to the relationship between the POC of the reference picture and the POC of the reference picture.
予測動きベクトル候補生成部121は、各予測ブロックグループ毎に、所定の順序で、それぞれの予測ブロックグループ内の予測ブロックに対して、後述の条件判定を行い、最初に条件に合致した予測ブロックの動きベクトルを選択し、予測動きベクトルの候補mvLXA、mvLXB、mvLXColとする。
The motion vector predictor
左側に隣接する予測ブロックグループから予測動きベクトルを算出する際には、左側に隣接する予測ブロックグループの下から上の順序(図5のA0からA0,A1の順序)で、上側に隣接する予測ブロックグループから予測動きベクトルを算出する際には、上側に隣接する予測ブロックグループの右から左の順序(図5のB0からB0,B1,B2の順序)で、異なる時間の予測ブロックグループから予測動きベクトルを算出する際には、図9のT0からT0,T1の順序で、各予測ブロックに対して、後述の条件判定を行い、最初に条件に合致した予測ブロックの動きベクトルを選択し、予測動きベクトルの候補をそれぞれmvLXA、mvLXB、mvLXColとする。 When calculating a prediction motion vector from a prediction block group adjacent to the left side, predictions adjacent to the upper side in the order from the bottom to the top of the prediction block group adjacent to the left side (order of A0 to A0 and A1 in FIG. 5). When calculating a prediction motion vector from a block group, prediction is performed from prediction block groups at different times in the order from right to left of the prediction block group adjacent to the upper side (order B0 to B0, B1, and B2 in FIG. 5). When calculating the motion vector, condition determination to be described later is performed for each prediction block in the order of T0 to T0 and T1 in FIG. 9, and the motion vector of the prediction block that first matches the condition is selected. Predicted motion vector candidates are mvLXA, mvLXB, and mvLXCol, respectively.
即ち、左側の隣接予測ブロックグループでは、一番下の予測ブロックが最も優先順位が高く、下から上に向かって優先順位が付けられており、上側の隣接予測ブロックグループでは、一番右の予測ブロックが最も優先順位が高く、右から左に向かって優先順位が付けられている。異なる時間の予測ブロックグループでは、T0の予測ブロックが最も優先順位が高く、T0,T1の順に優先順位が付けられている。 That is, in the left adjacent prediction block group, the lowest prediction block has the highest priority, and the priority is given from the bottom to the top. In the upper adjacent prediction block group, the rightmost prediction block Blocks have the highest priority and are prioritized from right to left. In the prediction block group at different times, the prediction block of T0 has the highest priority, and the priority is given in the order of T0 and T1.
(空間予測ブロックの条件判定のループの説明)
左側の隣接予測ブロックグループ、及び上側の隣接予測ブロックグループの各隣接予測ブロックに対しては、後述するスキャン方法1、2、3、4では、下記の条件判定1、2、3、4の優先順序でそれぞれの条件判定が適用される。ただし、後述するスキャン方法5のみ例外として、条件判定1、3、2、4の優先順序でそれぞれの条件判定が適用される。
条件判定1:符号化または復号対象の予測ブロックの差分動きベクトル算出対象のLXの動きベクトルと同じ参照リストLXで、同じ参照インデックス、すなわち同じ参照ピクチャを用いた予測が隣接予測ブロックでも行われている。
条件判定2:符号化または復号対象の予測ブロックの差分動きベクトル算出対象のLXの動きベクトルとは異なる参照リストLYであるが、同じ参照ピクチャを用いた予測が隣接予測ブロックで行われている。
条件判定3:符号化または復号対象の予測ブロックの差分動きベクトル算出対象のLXの動きベクトルと同じ参照リストLXで、異なる参照ピクチャを用いた予測が隣接予測ブロックで行われている。
条件判定4:符号化または復号対象の予測ブロックの差分動きベクトル算出対象のLXの動きベクトルとは異なる参照リストLYで、異なる参照ピクチャを用いた予測が隣接予測ブロックで行われている。
(Explanation of loop for condition judgment of spatial prediction block)
For each of the adjacent prediction blocks of the left adjacent prediction block group and the upper adjacent prediction block group, in the
Condition determination 1: Prediction using the same reference index, that is, the same reference picture is performed in the adjacent prediction block with the same reference list LX as the motion vector of the LX that is the difference motion vector calculation target of the prediction block to be encoded or decoded. Yes.
Condition determination 2: Although the reference list LY is different from the LX motion vector of the difference motion vector calculation target of the prediction block to be encoded or decoded, prediction using the same reference picture is performed in the adjacent prediction block.
Condition determination 3: Prediction using the same reference list LX as the motion vector of the LX that is the difference motion vector calculation target of the prediction block to be encoded or decoded is performed in the adjacent prediction block.
Condition determination 4: Prediction using a different reference picture in a reference list LY different from a motion vector of an LX that is a differential motion vector calculation target of a prediction block to be encoded or decoded is performed in an adjacent prediction block.
これらの条件のいずれかに一致した場合、当該予測ブロックには条件に合致する動きベクトルは存在すると判断し、後に続く条件判定は行わない。なお、条件判定1または条件判定2の条件に合致した場合、該当する隣接予測ブロックの動きベクトルは同じ参照ピクチャに対応するものであるので、そのまま予測動きベクトルの候補とするが、条件判定3または条件判定4の条件に合致した場合、該当する隣接予測ブロックの動きベクトルは異なる参照ピクチャに対応するものであるので、その動きベクトルを基にスケーリングにより算出して予測動きベクトルの候補とする。
If any of these conditions is met, it is determined that there is a motion vector that matches the condition in the prediction block, and the subsequent condition determination is not performed. Note that when the condition of
空間予測ブロックのスキャンのループの仕方として、上記の4つの条件判定の進め方によって、下記の5通りの方法を設定することができる。それぞれの方法によって予測ベクトルの相応しさと最大処理量が異なり、それらを考慮してこれらの方法から選択し設定する。スキャン方法1については、図19〜図23のフローチャートを用いて詳しく後述するが、他のスキャン方法2〜5についても、当業者であればスキャン方法2〜5を実施する手順についてはスキャン方法1を実施する手順に準じて適宜設計できる事項であるから、詳しい説明を省略する。なお、ここでは動画像符号化装置における空間予測ブロックのスキャンのループ処理を説明するが、同様の処理は動画像復号装置においても可能である。
The following five methods can be set as a method of loop scanning of the spatial prediction block, depending on the above-described four conditions. The appropriateness of the prediction vector and the maximum processing amount differ depending on each method, and these are selected and set in consideration of them. The
スキャン方法1:
同じ参照ピクチャを用いたスケーリング演算が不要な予測動きベクトルの判定を優先し、4つの条件判定のうち予測ブロック毎に2つの条件判定を行い、条件を満たさなければ、隣の予測ブロックの条件判定に移る。最初の周回では条件判定1と条件判定2の条件判定を行い、次の予測ブロックの周回では条件判定3と条件判定4の条件判定を行う。
Scanning method 1:
Priority is given to the determination of a prediction motion vector that does not require scaling operation using the same reference picture, and two condition determinations are performed for each prediction block among the four condition determinations. If the condition is not satisfied, the condition determination of the adjacent prediction block is performed. Move on.
具体的には以下の優先順序で条件判定を行う。(ただし、NはAまたはB)
1.予測ブロックN0の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
2.予測ブロックN0の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
3.予測ブロックN1の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
4.予測ブロックN1の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
5.予測ブロックN2の条件判定1(同じ参照リストLX、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
6.予測ブロックN2の条件判定2(異なる参照リストLY、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
7.予測ブロックN0の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
8.予測ブロックN0の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
9.予測ブロックN1の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
10.予測ブロックN1の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
11.予測ブロックN2の条件判定3(同じ参照リストLX、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
12.予測ブロックN2の条件判定4(異なる参照リストLY、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
Specifically, the condition determination is performed in the following priority order. (However, N is A or B)
1.
2. Prediction block N0 condition determination 2 (different reference list LY, same reference picture)
3.
4).
5. 5.
8). Prediction block N0 condition decision 4 (different reference list LY, different reference picture)
9.
10. Prediction block N1 condition determination 4 (different reference list LY, different reference picture)
11. 11.
スキャン方法1によれば、同じ参照ピクチャを用いたスケーリング演算が不要な予測動きベクトルが選ばれやすいので、差分動きベクトルの符号量が小さくなる可能性が高くなる効果がある。また、条件判定の周回数が最大2回となるので、ハードウェアへの実装を考慮した際に予測ブロックの符号化情報へのメモリアクセス回数が後述するスキャン方法2に比べて少なくなり、複雑性が低減される。
According to the
スキャン方法2:
4つの条件判定のうち予測ブロック毎に1つの条件判定を行い、条件を満たさなければ、隣の予測ブロックの条件判定に移る。予測ブロック毎に条件判定を4周したら終了する。
Scanning method 2:
Of the four condition determinations, one condition determination is performed for each prediction block. If the condition is not satisfied, the process proceeds to the condition determination for the adjacent prediction block. If the condition determination is performed four times for each prediction block, the process is terminated.
具体的には以下の優先順序で条件判定を行う。(ただし、NはAまたはB)
1.予測ブロックN0の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
2.予測ブロックN1の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
3.予測ブロックN2の条件判定1(同じ参照リストLX、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
4.予測ブロックN0の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
5.予測ブロックN1の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
6.予測ブロックN2の条件判定2(異なる参照リストLY、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
7.予測ブロックN0の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
8.予測ブロックN1の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
9.予測ブロックN2の条件判定3(同じ参照リストLX、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
10.予測ブロックN0の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
11.予測ブロックN1の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
12.予測ブロックN2の条件判定4(異なる参照リストLY、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
Specifically, the condition determination is performed in the following priority order. (However, N is A or B)
1.
2.
3. 3.
5.
6). 6.
8).
9. 9.
11. Prediction block N1 condition determination 4 (different reference list LY, different reference picture)
12 Predictive block N2 condition decision 4 (different reference list LY, different reference picture), upper adjacent prediction block group only
スキャン方法2によれば、同じ参照ピクチャを用いたスケーリング演算が不要な予測動きベクトルが選ばれやすいので、差分動きベクトルの符号量が小さくなる可能性が高くなる効果がある。また、条件判定の周回数が最大4回となり、ハードウェアへの実装を考慮した際に予測ブロックの符号化情報へのメモリアクセス回数がスキャン方法1に比べて多くなるが、同じ参照リストの予測動きベクトルが選ばれやすくなる。
According to the
スキャン方法3:
最初の周回では予測ブロック毎に条件判定1の条件判定を行い条件を満たさなければ、隣の予測ブロックの条件判定に移る。次の周回では予測ブロック毎に条件判定2、条件判定3条件判定4順序で条件判定を行ってから隣に移る。
Scan method 3:
In the first round, the condition determination of
具体的には以下の優先順序で条件判定を行う。(ただし、NはAまたはB)
1.予測ブロックN0の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
2.予測ブロックN1の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
3.予測ブロックN2の条件判定1(同じ参照リストLX、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
4.予測ブロックN0の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
5.予測ブロックN0の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
6.予測ブロックN0の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
7.予測ブロックN1の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
8.予測ブロックN1の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
9.予測ブロックN1の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
10.予測ブロックN2の条件判定2(異なる参照リストLY、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
11.予測ブロックN2の条件判定3(同じ参照リストLX、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
12.予測ブロックN2の条件判定4(異なる参照リストLY、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
Specifically, the condition determination is performed in the following priority order. (However, N is A or B)
1.
2.
3. 3.
5.
6). Prediction block N0 condition decision 4 (different reference list LY, different reference picture)
7).
8).
9. Prediction block N1 condition determination 4 (different reference list LY, different reference picture)
10. 10.
スキャン方法3によれば、同じ参照リストで同じ参照ピクチャを用いたスケーリング演算が不要な予測動きベクトルが選ばれやすいので、差分動きベクトルの符号量が小さくなる可能性が高くなる効果がある。また、条件判定の周回数が最大2回となるので、ハードウェアへの実装を考慮した際に予測ブロックの符号化情報へのメモリアクセス回数がスキャン方法2に比べて少なくなり、複雑性が低減される。
According to the
スキャン方法4:
同じ予測ブロックの条件判定を優先し、1つの予測ブロック内で4つの条件判定を行い、すべての条件に合致しない場合、当該予測ブロックには条件に合致する動きベクトルは存在しないものと判断し、次の予測ブロックの条件判定を行う。
Scanning method 4:
Priority is given to condition determination of the same prediction block, and four condition determinations are performed within one prediction block. If all the conditions are not met, it is determined that there is no motion vector matching the condition in the prediction block. The condition of the next prediction block is determined.
具体的には以下の優先順序で条件判定を行う。(ただし、NはAまたはB)
1.予測ブロックN0の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
2.予測ブロックN0の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
3.予測ブロックN0の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
4.予測ブロックN0の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
5.予測ブロックN1の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
6.予測ブロックN1の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
7.予測ブロックN1の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
8.予測ブロックN1の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
9.予測ブロックN2の条件判定1(同じ参照リストLX、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
10.予測ブロックN2の条件判定2(異なる参照リストLY、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
11.予測ブロックN2の条件判定3(同じ参照リストLX、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
12.予測ブロックN2の条件判定4(異なる参照リストLY、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
Specifically, the condition determination is performed in the following priority order. (However, N is A or B)
1.
2. Prediction block N0 condition determination 2 (different reference list LY, same reference picture)
3.
4). Prediction block N0 condition decision 4 (different reference list LY, different reference picture)
5.
6).
7).
8). Prediction block N1 condition determination 4 (different reference list LY, different reference picture)
9. 9.
スキャン方法4によれば、条件判定の周回数が最大でも1回となるので、ハードウェアへの実装を考慮した際に予測ブロックの符号化情報へのメモリアクセス回数がスキャン方法1、スキャン方法2、スキャン方法3に比べて少なくなり、複雑性が低減される。
According to the scan method 4, since the number of rounds of condition determination is at most one, the number of memory accesses to the encoded information of the prediction block when the implementation in hardware is taken into consideration is the
スキャン方法5:
スキャン方法4と同様に、同じ予測ブロックの条件判定を優先し、1つの予測ブロック内で4つの条件判定を行い、すべての条件に合致しない場合、当該予測ブロックには条件に合致する動きベクトルは存在しないものと判断し、次の予測ブロックの条件判定を行う。ただし、予測ブロック内の条件判定においては、スキャン方法4は同じ参照ピクチャであることをより優先しているが、スキャン方法5は同じ参照リストであることを優先する。
Scanning method 5:
Similar to the scanning method 4, priority is given to the condition determination of the same prediction block, and four condition determinations are performed within one prediction block. If all the conditions are not met, the motion vector matching the condition is not included in the prediction block. It is determined that it does not exist, and the condition of the next prediction block is determined. However, in the condition determination in the prediction block, the scan method 4 gives priority to the same reference picture, but the scan method 5 gives priority to the same reference list.
具体的には以下の優先順序で条件判定を行う。(ただし、NはAまたはB)
1.予測ブロックN0の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
2.予測ブロックN0の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
3.予測ブロックN0の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
4.予測ブロックN0の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
5.予測ブロックN1の条件判定1(同じ参照リストLX、同じ参照ピクチャ)
6.予測ブロックN1の条件判定3(同じ参照リストLX、異なる参照ピクチャ)
7.予測ブロックN1の条件判定2(異なる参照リストLY、同じ参照ピクチャ)
8.予測ブロックN1の条件判定4(異なる参照リストLY、異なる参照ピクチャ)
9.予測ブロックN2の条件判定1(同じ参照リストLX、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
10.予測ブロックN2の条件判定3(同じ参照リストLX、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
11.予測ブロックN2の条件判定2(異なる参照リストLY、同じ参照ピクチャ)、上側に隣接する予測ブロックグループのみ
12.予測ブロックN2の条件判定4(異なる参照リストLY、異なる参照ピクチャ)、上側に隣接する予測ブロックグループのみ
Specifically, the condition determination is performed in the following priority order. (However, N is A or B)
1.
2.
3. Prediction block N0 condition determination 2 (different reference list LY, same reference picture)
4). Prediction block N0 condition decision 4 (different reference list LY, different reference picture)
5.
6).
7).
8). Prediction block N1 condition determination 4 (different reference list LY, different reference picture)
9. 9.
スキャン方法5によれば、さらに、スキャン方法4に比べて予測ブロックの参照リストの参照回数を減らすことができ、メモリへのアクセス回数、条件判定等の処理量を削減することにより複雑性を低減することができる。また、スキャン方法4と同様に、条件判定の周回数が最大でも1回となるので、ハードウェアへの実装を考慮した際に予測ブロックの符号化情報へのメモリアクセス回数がスキャン方法1、スキャン方法2、スキャン方法3に比べて少なくなり、複雑性が低減される。
According to the scan method 5, the number of times of reference block reference lists can be reduced compared to the scan method 4, and the complexity is reduced by reducing the number of times of access to the memory and the amount of processing such as condition determination. can do. Similarly to scan method 4, since the number of rounds for condition determination is at most one, the number of memory accesses to the encoded information of the prediction block is the
次に、予測動きベクトル候補登録部122は算出された予測動きベクトルの候補mvLXA、mvLXB、mvLXColを予測動きベクトルリストmvpListLXに格納する。
Next, the predicted motion vector
次に、予測動きベクトル冗長候補削除部123は、LXの予測動きベクトルリストmvpListLXに格納されたそれぞれの予測動きベクトルの候補の動きベクトルの値を比較し、予測動きベクトルの候補の中から同一の動きベクトルの値をもつものを判定し、同一の動きベクトル値をもつと判定された予測動きベクトルの候補について一つを残してそれ以外を予測動きベクトルリストmvpListLXから削除して、予測動きベクトルの候補が重複しないようにし、予測動きベクトルリストmvpListLXを更新する。ただし、規定された最終候補数finalNumMVPCandが1の場合、本冗長判定処理を省略することができる。
Next, the motion vector predictor redundant
予測動きベクトル候補数制限部124では、LXの予測動きベクトルリストmvpListLXに登録されている予測動きベクトルの候補数をカウントし、LXの予測動きベクトル候補数numMVPCandLXがカウントされた候補数の値に設定される。
In the motion vector predictor candidate
さらに、予測動きベクトル候補数制限部124では、LXの予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXを予測ブロックのサイズに応じて規定された最終候補数finalNumMVPCandに制限する。
Further, the motion vector predictor candidate
本実施の形態においては、予測ブロックのサイズに応じて最終候補数finalNumMVPCandを規定している。なぜなら、予測動きベクトルリストに登録される予測動きベクトルの候補数が予測動きベクトルリストの構築状態に応じて変動すると、復号側では予測動きベクトルリストを構築してからでないと、予測動きベクトルインデックスをエントロピー復号することができないからである。さらに、エントロピー復号が異なる時間のピクチャの予測ブロックから導出された予測動きベクトル候補mvLXColを含む予測動きベクトルリストの構築状態に依存すると、別のピクチャの符号化ビット列の復号時にエラーが発生した際に現在のピクチャの符号化ビット列もそのエラーの影響を受けて正常にエントロピー復号を続けることができない問題がある。予測ブロックのサイズに応じて最終候補数finalNumMVPCandを固定した数に規定すると、予測動きベクトルリストの構築と独立して、予測動きベクトルインデックスをエントロピー復号することができるとともに、別のピクチャの符号化ビット列の復号時にエラーが発生してもその影響を受けずに現在のピクチャの符号化ビット列のエントロピー復号を続けることができる。 In the present embodiment, the final candidate number finalNumMVPCand is defined according to the size of the prediction block. This is because if the number of motion vector predictor candidates registered in the motion vector predictor list fluctuates according to the state of construction of the motion vector predictor list, the motion vector list on the decoding side must be constructed before the motion vector predictor list is constructed. This is because entropy decoding cannot be performed. Furthermore, if entropy decoding depends on the construction state of the motion vector predictor list including the motion vector candidate mvLXCol derived from the prediction block of the picture at different time, when an error occurs when decoding the encoded bit string of another picture The encoded bit string of the current picture is also affected by the error, and there is a problem that entropy decoding cannot be continued normally. If the final candidate number finalNumMVPCand is defined as a fixed number according to the size of the prediction block, the prediction motion vector index can be entropy-decoded independently of the construction of the prediction motion vector list, and an encoded bit string of another picture Even if an error occurs during decoding, it is possible to continue entropy decoding of the encoded bit string of the current picture without being affected by the error.
予測動きベクトル候補数制限部124では、LXの予測動きベクトル候補数numMVPCandLXが規定された最終候補数finalNumMVPCandより小さい場合、予測動きベクトル候補数numMVPCandLXが最終候補数finalNumMVPCandと同じ値になるまで、(0,0)(水平および垂直成分がともに0)の値を持つ動きベクトルを予測動きベクトルリストmvpListLXに追加することで予測動きベクトルの候補数を規定値に制限する。この場合、重複して(0,0)の値を持つ動きベクトルが追加されることがあるが、復号側では予測動きベクトルインデックスが0から(規定の候補数−1)の範囲内でどのような値をとっても、予測動きベクトルを確定することができる。一方、LXの予測動きベクトル候補数numMVPCandLXが規定された最終候補数finalNumMVPCandより大きい場合、予測動きベクトルリストmvpListLXからfinalNumMVPCand-1より大きいインデックスに登録されている要素をすべて削除し、LXの予測動きベクトル候補数numMVPCandLXを最終候補数finalNumMVPCandと同じ値にすることで予測動きベクトルの候補数を規定値に制限する。更新された予測動きベクトルリストmvpListLXは予測動きベクトル候補符号量算出部125と予測動きベクトル選択部126に供給される。
When the number of predicted motion vector candidates numMVPCandLX is smaller than the specified final candidate number finalNumMVPCand, the predicted motion vector candidate number limit unit 124 (0 until the predicted motion vector candidate number numMVPCandLX becomes the same value as the final candidate number finalNumMVPCand. , 0) (the horizontal and vertical components are both 0) are added to the predicted motion vector list mvpListLX, thereby limiting the number of predicted motion vector candidates to a specified value. In this case, a motion vector having a value of (0, 0) may be added in duplicate, but on the decoding side, how the predicted motion vector index falls within the range from 0 to (specified number of candidates −1). Even if a large value is taken, the predicted motion vector can be determined. On the other hand, when the number of predicted motion vector candidates for LX numMVPCandLX is larger than the final number of final candidates defined, finalNumMVPCand, all elements registered at an index larger than finalNumMVPCand-1 are deleted from the predicted motion vector list mvpListLX, and the predicted motion vector for LX By setting the number of candidates numMVPCandLX to the same value as the final candidate number finalNumMVPCand, the number of motion vector predictor candidates is limited to a specified value. The updated prediction motion vector list mvpListLX is supplied to the prediction motion vector candidate code
一方、図1の動きベクトル検出部102にて予測ブロック毎にLX(X=0または1)の動きベクトルmvLXが検出される。それらの動きベクトルmvLXは更新された予測動きベクトルリストmvpListLXの予測動きベクトルの候補とともに予測動きベクトル候補符号量算出部125に供給される。
On the other hand, a motion vector mvLX of LX (X = 0 or 1) is detected for each prediction block by the motion
予測動きベクトル候補符号量算出部125は、LX(X=0または1)の予測動きベクトルリストmvpListLXの中に格納されたそれぞれの予測動きベクトルの候補mvpListLX[i]ごとに動きベクトルmvLXとの差分動きベクトルを算出し、それら差分動きベクトルを符号化したときの符号量をそれぞれ算出し、予測動きベクトル選択部126に供給する。
The motion vector predictor candidate code
予測動きベクトル選択部126は、LXの予測動きベクトルリストmvpListLXに登録された各要素の中で、予測動きベクトルの候補毎の符号量が最小となる予測動きベクトルの候補mvpListLX[i]をLXの予測動きベクトルmvpLXとして選択する。予測動きベクトルリストmvpListLXの中で最小の発生符号量となる予測動きベクトルの候補が複数存在する場合には、予測動きベクトルリストmvpListLXの中のインデックスiが小さい番号で表される予測動きベクトルの候補mvpListLX[i]をLXの最適な予測動きベクトルmvpLXとして選択する。選択された予測動きベクトルmvpLXを動きベクトル減算部127に供給する。さらに、その選択された予測動きベクトルmvpLXに対応する予測動きベクトルリスト中のインデックスiをLXの予測動きベクトルインデックスmvpIdxLXとして出力する。
The motion vector
最後に動きベクトル減算部127は、LXの動きベクトルmvLXから選択されたLXの予測動きベクトルmvpLXを減算することによりLXの差分動きベクトルmvdLXを算出し、差分動きベクトルmvdLXを出力する。
mvdLX = mvLX - mvpLX
Finally, the motion
mvdLX = mvLX-mvpLX
図1に戻り、動き補償予測部105は、復号画像メモリ115に格納されている復号ピクチャの画像信号を参照して動きベクトル検出部102から供給されるLX(X=0または1)の動きベクトルmvLXに応じて動き補償を行い、予測画像信号を得て、予測方法決定部106に供給する。
Returning to FIG. 1, the motion
予測方法決定部106は、予測方法を決定する。それぞれの予測モードごとに符号量と符号化歪を算出し、最も少ない発生符号量と符号化歪となる予測ブロックサイズと予測モードが決定される。差分動きベクトル算出部103の動きベクトル減算部127から供給されたLXの差分動きベクトルmvdLXと予測動きベクトル選択部126から供給された予測動きベクトルを表すLXの予測動きベクトルインデックスmvpIdxLXの符号化が行われ、動き情報の符号量を算出する。さらに、動き補償予測部105から供給される予測画像信号と、画像メモリ101から供給される符号化対象の画像信号との予測残差信号を符号化した予測残差信号の符号量を算出する。動き情報の符号量と予測残差信号の符号量とが加算された総発生符号量を算出し、第1の評価値とする。
The prediction
また、こうした予測残差信号を符号化後に、歪量評価の為に復号し、符号化により生じる元の画像信号との誤差を表す比率として符号化歪が算出される。これら総発生符号量と符号化歪とを動き補償毎に比較することで、最も少ない発生符号量と符号化歪となる予測ブロックサイズと予測モードが決定される。決定された予測ブロックサイズの予測モードに応じた動きベクトルmvLXに対して、上述した動きベクトルの予測方法が行われ、予測動きベクトルを表すインデックスmvpIdxLXが、予測ブロック単位の第2のシンタックスパターンで表されるシンタックス要素mvp_idx_lX[i]として符号化される。尚、ここで算出される発生符号量は、符号化過程をシミュレートしたものであることが望ましいが、簡便に近似したり、概算することも可能である。 Further, after encoding such a prediction residual signal, it is decoded for distortion amount evaluation, and the encoding distortion is calculated as a ratio representing an error from the original image signal caused by the encoding. By comparing the total generated code amount and the coding distortion for each motion compensation, the prediction block size and the prediction mode that generate the least generated code amount and the coding distortion are determined. The motion vector prediction method described above is performed on the motion vector mvLX corresponding to the prediction mode of the determined prediction block size, and the index mvpIdxLX representing the prediction motion vector is a second syntax pattern in units of prediction blocks. It is encoded as the represented syntax element mvp_idx_lX [i]. The generated code amount calculated here is preferably a simulation of the encoding process, but can be approximated or approximated easily.
(復号における動きベクトルの予測)
上述のシンタックスに基づき、符号化された動画像のビットストリームを復号する動画像復号装置において、本発明に係る動きベクトルの予測方法の動作を説明する。
(Prediction of motion vector in decoding)
The operation of the motion vector prediction method according to the present invention in the video decoding device that decodes the encoded video bitstream based on the above-described syntax will be described.
実施の形態に係る動きベクトルの予測方法が実施される場合、図2の動画像復号装置の動きベクトル算出部204にて処理が行われる。図14は、実施の形態の動画像符号化装置に対応する図2の動画像復号装置の動きベクトル算出部204の詳細な構成を示す図である。図14の太枠線で囲まれる部分は動きベクトル算出部204を示している。更に、その内部の太点線で囲まれる部分は後述する動きベクトルの予測方法の動作部を示しており、対応する動画像符号化装置にも同様に設置され、符号化と復号で矛盾しない同一の判定結果を得られるようにしている。以下、この図を用いて、復号における動きベクトルの予測方法を説明する。
When the motion vector prediction method according to the embodiment is performed, processing is performed by the motion
本実施の形態においては、符号化側で説明した理由により、符号化側と同様に復号側でも、復号対象の予測ブロックのサイズに応じて、予測動きベクトルの最終候補数finalNumMVPCandを設定する。動きベクトル算出部204では、復号対象の輝度信号の予測ブロックのサイズが規定したサイズsizePUNumMVPCand以下の場合、finalNumMVPCandを後者よりも小さい数に設定し、そうでない場合、finalNumMVPCandを前者よりも大きい数に設定する。本実施の形態においては、規定するサイズsizePUNumMVPCandを8x8とし、復号対象の輝度信号の予測ブロックのサイズが規定したサイズsizePUNumMVPCand以下の場合は、finalNumMVPCandを1に設定し、それ以外の場合は、finalNumMVPCandを2に設定する。
In the present embodiment, for the reason explained on the encoding side, the final motion vector finalNumMVPCand is set on the decoding side as well as the encoding side according to the size of the prediction block to be decoded. The motion
動きベクトル算出部204は、予測動きベクトル候補生成部221、予測動きベクトル候補登録部222、予測動きベクトル冗長候補削除部223、予測動きベクトル候補数制限部224、予測動きベクトル選択部225及び動きベクトル加算部226を含む。
The motion
この動きベクトル算出部204での動きベクトル算出処理は、インター予測で用いる動きベクトルをL0,L1毎にそれぞれ算出する。具体的には復号対象ブロックの予測モードPredModeがインター予測(MODE_INTER)で、復号対象ブロックのインター予測モードがL0予測(Pred_L0)の場合、L0の予測動きベクトルリストmvpListL0を算出して、予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0を算出する。復号対象ブロックのインター予測モードがL1予測(Pred_L1)の場合、L1の予測動きベクトルリストmvpListL1を算出して、予測動きベクトルmvpL1を選択し、L1の動きベクトルmvL1を算出する。復号対象ブロックのインター予測モードが双予測(Pred_BI)の場合、L0予測とL1予測が共に行われ、L0の予測動きベクトルリストmvpListL0を算出して、L0の予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0を算出するとともに、L1の予測動きベクトルリストmvpListL1を算出して、L1の予測動きベクトルmvpL1を算出し、L1の動きベクトルmvL1をそれぞれ算出する。
符号化側と同様に、復号側でもL0、L1それぞれについて、動きベクトル算出処理を行うが、L0、L1ともに共通の処理となる。したがって、以下の説明においてはL0、L1を共通のLXとして表す。L0の動きベクトルを算出する処理ではXが0であり、L1の動きベクトルを算出する処理ではXが1である。また、LXの動きベクトルを算出する処理中に、LXではなく、もう一方のリストの情報を参照する場合、もう一方のリストをLYとして表す。
In the motion vector calculation process in the motion
Similar to the encoding side, the motion vector calculation processing is performed for each of L0 and L1 on the decoding side, but both L0 and L1 are common processing. Therefore, in the following description, L0 and L1 are represented as a common LX. X is 0 in the process of calculating the L0 motion vector, and X is 1 in the process of calculating the L1 motion vector. When the information of the other list is referred to instead of LX during the process of calculating the LX motion vector, the other list is represented as LY.
動きベクトル算出部204の中の予測動きベクトル候補生成部221、予測動きベクトル候補登録部222、予測動きベクトル冗長候補削除部223及び予測動きベクトル候補数制限部224は、符号化側の差分動きベクトル算出部103の中の予測動きベクトル候補生成部121、予測動きベクトル候補登録部122及び予測動きベクトル冗長候補削除部123、予測動きベクトル候補数制限部124とそれぞれ同じ動作をするように規定することにより、符号化と復号で矛盾しない同一の予測動きベクトルの候補を符号化側及び復号側で得ることができる。
The motion
予測動きベクトル候補生成部221は、図13の符号化側の予測動きベクトル候補生成部121と同一の処理を行う。復号して符号化情報格納メモリ209に記録されていた、復号対象ブロックと同一ピクチャ内の復号対象ブロックと隣接する復号済みの予測ブロック及び異なるピクチャ内の復号対象ブロックと同一位置あるいはその近傍の位置に存在する復号済みの予測ブロック等の動きベクトルを符号化情報格納メモリ209から読み出す。符号化情報格納メモリ209から読み出された復号済みの他のブロックの動きベクトルから予測ブロックグループごとに予測動きベクトルの候補mvLXA、mvLXB、mvLXColを生成し、予測動きベクトル候補登録部222に供給する。
The motion vector predictor
これらの予測動きベクトルの候補mvLXA、mvLXB、mvLXColは参照インデックスに応じてスケーリングすることにより算出されることもある。なお、予測動きベクトル候補生成部221は、図13の符号化側の予測動きベクトル候補生成部121と同一の処理を行うので、図13の符号化側の予測動きベクトル候補生成部121で説明した予測動きベクトルを算出するためのスキャン方法1、2、3、4、5の条件判定は予測動きベクトル候補生成部221でも適用できるものとし、ここでは詳細な説明は省略する。
These predicted motion vector candidates mvLXA, mvLXB, and mvLXCol may be calculated by scaling according to the reference index. Since the motion vector predictor
次に、予測動きベクトル候補登録部222は図13の符号化側の予測動きベクトル候補登録部122と同一の処理を行う。算出された予測動きベクトルの候補mvLXA、mvLXB、mvLXColをLXの予測動きベクトルリストmvpListLXに格納する。
Next, the motion vector predictor
次に、予測動きベクトル冗長候補削除部223は、図13の符号化側の予測動きベクトル冗長候補削除部123と同一の処理を行う。LXの予測動きベクトルリストmvpListLXに格納された予測動きベクトルの候補の中から同一の動きベクトルの値をもつものを判定し、同一の動きベクトル値をもつと判定された予測動きベクトルの候補について一つを残してそれ以外を予測動きベクトルリストmvpListLXから削除して、予測動きベクトルの候補が重複しないようにし、予測動きベクトルリストmvpListLXを更新する。ただし、規定された最終候補数finalNumMVPCandが1の場合、本冗長判定処理を省略することができる。
Next, the motion vector redundancy
次に、予測動きベクトル候補数制限部224は、図13の符号化側の予測動きベクトル候補数制限部124と同一の処理を行う。予測動きベクトル候補数制限部224では、予測動きベクトルリストmvpListLXに登録されている要素数をカウントし、LXの予測動きベクトル候補数numMVPCandLXがカウントされた候補数の値に設定される。
Next, the motion vector predictor candidate
さらに、予測動きベクトル候補数制限部224では、符号化側で説明した理由により予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXを予測ブロックのサイズに応じて規定された最終候補数finalNumMVPCandに制限する。LXの予測動きベクトル候補数numMVPCandLXが規定された最終候補数finalNumMVPCandより小さい場合、予測動きベクトル候補数numMVPCandLXが最終候補数finalNumMVPCandと同じ値になるまで、(0,0)の値を持つ動きベクトルを予測動きベクトルリストmvpListLXに追加することで予測動きベクトルの候補数を規定値に制限する。この場合、重複して(0,0)の値を持つ動きベクトルが追加されることがあるが、復号側では予測動きベクトルインデックスが0から規定値−1の範囲内でどのような値をとっても、予測動きベクトルを確定することができる。一方、LXの予測動きベクトル候補数numMVPCandLXが規定された最終候補数finalNumMVPCandより大きい場合、予測動きベクトルリストmvpListLXからfinalNumMVPCand-1より大きいインデックスに登録されている要素をすべて削除し、LXの予測動きベクトル候補数numMVPCandLXを最終候補数finalNumMVPCandと同じ値にすることで予測動きベクトルの候補数を規定値に制限する。更新された予測動きベクトルリストmvpListLXは予測動きベクトル選択部225に供給される。
Further, in the motion vector predictor candidate
一方、第1符号化ビット列復号部202にて復号された予測ブロック毎のLX(X=0または1)の差分動きベクトルmvdLXが動きベクトル加算部226に供給される。第1符号化ビット列復号部202にて復号されたLXの予測動きベクトルの予測動きベクトルインデックスmvpIdxLXが予測動きベクトル選択部225に供給される。ただし、規定された最終候補数finalNumMVPCandが1の場合、LXの予測動きベクトルの予測動きベクトルインデックスmvpIdxLXが符号化されておらず、予測動きベクトル選択部225に供給されない。
On the other hand, the LX (X = 0 or 1) differential motion vector mvdLX for each prediction block decoded by the first encoded bit
予測動きベクトル選択部225は、第1符号化ビット列復号部202にて復号されたLXの予測動きベクトルインデックスmvpIdxLXが供給され、供給されたインデックスmvpIdxLXに対応する予測動きベクトルの候補mvpListLX[mvpIdxLX]をLXの予測動きベクトルmvpLXとして予測動きベクトルリストmvpListLXから取り出す。ただし、規定された最終候補数finalNumMVPCandが1の場合、予測動きベクトルリストmvpListLXのインデックスiが0に登録されている唯一の予測動きベクトルの候補mvpListLX[0]を取り出す。供給された予測動きベクトルの候補を予測動きベクトルmvpLXとして動きベクトル加算部226に供給する。
The prediction motion
最後に動きベクトル加算部226は、第1符号化ビット列復号部202にて復号されて供給されるLXの差分動きベクトルmvdLXとLXの予測動きベクトルmvpLXを加算することによりLXの動きベクトルmvを算出し、動きベクトルmvLXを出力する。
mvLX = mvpLX + mvdLX
Finally, the motion
mvLX = mvpLX + mvdLX
以上のようにして、予測ブロック毎にLXの動きベクトルmvLXが算出される。この動きベクトルを使用して動き補償により予測画像信号が生成され、復号された予測残差信号と加算されることで復号画像信号が生成される。 As described above, the LX motion vector mvLX is calculated for each prediction block. A predicted image signal is generated by motion compensation using this motion vector, and is added to the decoded prediction residual signal to generate a decoded image signal.
動画像符号化装置の差分動きベクトル算出部103、動画像復号装置の動きベクトル算出部204の処理手順について、それぞれ図15、図16のフローチャートを用いて説明する。図15は動画像符号化装置による差分動きベクトル算出処理手順を示すフローチャートであり、図16は動画像復号装置による動きベクトル算出処理手順を示すフローチャートである。
Processing procedures of the difference motion
図15を参照して符号化側の差分動きベクトル算出処理手順を説明する。符号化側では、まず、差分動きベクトル算出部103で、予測動きベクトルの候補の最終候補数finalNumMVCandを設定する(S100)。ステップS100の詳細な処理手順については図17のフローチャートを用いて後述する。
The difference motion vector calculation processing procedure on the encoding side will be described with reference to FIG. On the encoding side, first, the differential motion
続いて、差分動きベクトル算出部103で、符号化対象ブロックで選択されたインター予測で用いる動きベクトルの差分動きベクトルをL0、L1毎にそれぞれ算出する(S101〜S106)。具体的には符号化対象ブロックの予測モードPredModeがインター予測(MODE_INTER)で、インター予測モードがL0予測(Pred_L0)の場合、L0の予測動きベクトルリストmvpListL0を算出して、予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0の差分動きベクトルmvdL0を算出する。符号化対象ブロックのインター予測モードがL1予測(Pred_L1)の場合、L1の予測動きベクトルリストmvpListL1を算出して、予測動きベクトルmvpL1を選択し、L1の動きベクトルmvL1の差分動きベクトルmvdL1を算出する。符号化対象ブロックのインター予測モードが双予測(Pred_BI)の場合、L0予測とL1予測が共に行われ、L0の予測動きベクトルリストmvpListL0を算出して、L0の予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0の差分動きベクトルmvdL0を算出するとともに、L1の予測動きベクトルリストmvpListL1を算出して、L1の予測動きベクトルmvpL1を算出し、L1の動きベクトルmvL1の差分動きベクトルmvdL1をそれぞれ算出する。
Subsequently, the differential motion
L0、L1それぞれについて、差分動きベクトル算出処理を行うが、L0、L1ともに共通の処理となる。したがって、以下の説明においてはL0、L1を共通のLXとして表す。L0の差分動きベクトルを算出する処理ではXが0であり、L1の差分動きベクトルを算出する処理ではXが1である。また、LXの差分動きベクトルを算出する処理中に、LXではなく、もう一方のリストの情報を参照する場合、もう一方のリストをLYとして表す。 Difference motion vector calculation processing is performed for each of L0 and L1, but both L0 and L1 are common processing. Therefore, in the following description, L0 and L1 are represented as a common LX. In the process of calculating the differential motion vector of L0, X is 0, and in the process of calculating the differential motion vector of L1, X is 1. Further, when referring to the information of the other list instead of LX during the process of calculating the differential motion vector of LX, the other list is represented as LY.
LXの差分動きベクトルmvdLXを算出する場合(S102のYES)、LXの予測動きベクトルの候補を算出してLXの予測動きベクトルリストmvpListLXを構築する(S103)。差分動きベクトル算出部103の中の予測動きベクトル候補生成部121で複数の予測動きベクトルの候補を算出し、予測動きベクトル候補登録部122で予測動きベクトルリストmvpListLXに算出した予測動きベクトルの候補を追加し、予測動きベクトル冗長候補削除部123で不要な予測動きベクトルの候補を削除し、予測動きベクトル候補数制限部124で予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXが設定され、予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXを規定された最終候補数finalNumMVPCandに制限することにより、予測動きベクトルリストmvpListLXを構築する。ステップS103の詳細な処理手順については図18のフローチャートを用いて後述する。
When the LX differential motion vector mvdLX is calculated (YES in S102), the LX predicted motion vector candidates are calculated to construct the LX predicted motion vector list mvpListLX (S103). The motion vector predictor
続いて、予測動きベクトル候補符号量算出部125、及び予測動きベクトル選択部126により、LXの予測動きベクトルリストmvpListLXからLXの予測動きベクトルmvpLXを選択する(S104)。まず、予測動きベクトル候補符号量算出部125で、動きベクトルmvLXと予測動きベクトルリストmvpListLXの中に格納された各予測動きベクトルの候補mvpListLX[i]との差分であるそれぞれの差分動きベクトルを算出し、それら差分動きベクトルを符号化したときの符号量を予測動きベクトルリストmvpListLXの要素ごとに算出し、予測動きベクトル選択部126で、予測動きベクトルリストmvpListLXに登録された各要素の中で、予測動きベクトルの候補毎の符号量が最小となる予測動きベクトルの候補mvpListLX[i]を予測動きベクトルmvpLXとして選択する。予測動きベクトルリストmvpListLXの中で最小の発生符号量となる予測動きベクトルの候補が複数存在する場合には、予測動きベクトルリストmvpListLXの中のインデックスiが小さい番号で表される予測動きベクトルの候補mvpListLX[i]を最適予測動きベクトルmvpLXとして選択する。
Subsequently, the predicted motion vector candidate code
続いて、動きベクトル減算部127で、LXの動きベクトルmvLXから選択されたLXの予測動きベクトルmvpLXを減算することによりLXの差分動きベクトルmvdLXを算出する(S105)。
mvdLX = mvLX - mvpLX
Subsequently, the motion
mvdLX = mvLX-mvpLX
次に、図16を参照して復号側の動きベクトル算出処理手順を説明する。復号側では、動きベクトル算出部204で、インター予測で用いる動きベクトルをL0,L1毎にそれぞれ算出する(S201〜S206)。具体的には復号対象ブロックの予測モードPredModeがインター予測(MODE_INTER)で、復号対象ブロックのインター予測モードがL0予測(Pred_L0)の場合、L0の予測動きベクトルリストmvpListL0を算出して、予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0を算出する。復号対象ブロックのインター予測モードがL1予測(Pred_L1)の場合、L1の予測動きベクトルリストmvpListL1を算出して、予測動きベクトルmvpL1を選択し、L1の動きベクトルmvL1を算出する。復号対象ブロックのインター予測モードが双予測(Pred_BI)の場合、L0予測とL1予測が共に行われ、L0の予測動きベクトルリストmvpListL0を算出して、L0の予測動きベクトルmvpL0を選択し、L0の動きベクトルmvL0を算出するとともに、L1の予測動きベクトルリストmvpListL1を算出して、L1の予測動きベクトルmvpL1を算出し、L1の動きベクトルmvL1をそれぞれ算出する。
Next, the decoding-side motion vector calculation processing procedure will be described with reference to FIG. On the decoding side, the motion
符号化側と同様に、復号側でもL0、L1それぞれについて、動きベクトル算出処理を行うが、L0、L1ともに共通の処理となる。したがって、以下の説明においてはL0、L1を共通のLXとして表す。L0の動きベクトルを算出する処理ではXが0であり、L1の動きベクトルを算出する処理ではXが1である。また、LXの動きベクトルを算出する処理中に、LXではなく、もう一方のリストの情報を参照する場合、もう一方のリストをLYとして表す。 Similar to the encoding side, the motion vector calculation processing is performed for each of L0 and L1 on the decoding side, but both L0 and L1 are common processing. Therefore, in the following description, L0 and L1 are represented as a common LX. X is 0 in the process of calculating the L0 motion vector, and X is 1 in the process of calculating the L1 motion vector. When the information of the other list is referred to instead of LX during the process of calculating the LX motion vector, the other list is represented as LY.
LXの動きベクトルmvLXを算出する場合(S202のYES)、LXの予測動きベクトルの候補を算出してLXの予測動きベクトルリストmvpListLXを構築する(S203)。動きベクトル算出部204の中の予測動きベクトル候補生成部221で複数の予測動きベクトルの候補を算出し、予測動きベクトル候補登録部222で予測動きベクトルリストmvpListLXに算出した予測動きベクトルの候補を追加し、予測動きベクトル冗長候補削除部223で不要な予測動きベクトルの候補を削除し、予測動きベクトル候補数制限部224で予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXが設定され、予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXを規定された最終候補数finalNumMVPCandに制限することにより、予測動きベクトルリストmvpListLXを構築する。ステップS203の詳細な処理手順については図18のフローチャートを用いて後述する。
When calculating an LX motion vector mvLX (YES in S202), an LX predicted motion vector candidate is calculated to construct an LX predicted motion vector list mvpListLX (S203). The motion
続いて、予測動きベクトル選択部225で予測動きベクトルリストmvpListLXから第1符号化ビット列復号部202にて復号された予測動きベクトルのインデックスmvpIdxLXに対応する予測動きベクトルの候補mvpListLX[mvpIdxLX]を選択された予測動きベクトルmvpLXとして取り出す(S204)。ただし、最大候補数finalNumCandLXが1の場合、予測動きベクトルリストmvpListLXに登録されている唯一の予測動きベクトルの候補mvpListLX[0]を選択された予測動きベクトルmvpLXとして取り出す。
Subsequently, a predicted motion vector candidate mvpListLX [mvpIdxLX] corresponding to the predicted motion vector index mvpIdxLX decoded by the first encoded bit
続いて、動きベクトル加算部226で第1符号化ビット列復号部202にて復号されて供給されるLXの差分動きベクトルmvdLXとLXの予測動きベクトルmvpLXを加算することによりLXの動きベクトルmvLXを算出する(図16のS205)。
mvLX = mvpLX + mvdLX
Subsequently, the motion
mvLX = mvpLX + mvdLX
次に、図15のS100、及び図16のS200で共通の予測動きベクトルの最終候補数を設定する手順について詳細に説明する。 Next, a procedure for setting the final number of motion vector predictor common in S100 of FIG. 15 and S200 of FIG. 16 will be described in detail.
予測動きベクトル候補数制限部124及び予測動きベクトル候補数制限部224は符号化または復号対象の予測ブロックのサイズに応じて、予測動きベクトルの最終候補数finalNumMVPCandを設定する。
The predicted motion vector candidate
図17は予測動きベクトルの最終候補数設定処理手順を示すフローチャートである。 FIG. 17 is a flowchart showing the final candidate number setting processing procedure of the motion vector predictor.
まず、符号化または復号対象の予測ブロックのサイズを得る(S401)。符号化または復号対象の予測ブロックのサイズが規定したサイズsizePUNumMVPCand以下の場合(S402のYES)、finalNumMVPCandを後者よりも小さい数に設定し(S403)、そうでない場合、finalNumMVPCandを前者よりも大きい数に設定する(S404)。本実施の形態においては、規定するサイズsizePUNumMVPCandを8x8とし、符号化または復号対象の輝度信号の予測ブロックのサイズが規定したサイズsizePUNumMVPCand以下の場合は、finalNumMVPCandを1に設定し、それ以外の場合は、finalNumMVPCandを2に設定する。なお、規定するサイズsizePUNumMVPCandは固定された値であってもよいし、シーケンス、ピクチャまたはスライス単位でシンタックス要素を用意して設定してもよい。また、8x4と4x8等、幅と高さを乗じた値が等しいサイズの場合は同じサイズとみなす。即ち、規定するサイズsizePUNumMVPCandが8x4と設定された場合、4x8も設定されたものとみなす。また、ステップS402で、符号化または復号対象の予測ブロックのサイズが規定したサイズsizePUNumMVPCand未満の場合、finalNumMVPCandを後者よりも小さい数に設定し、そうでない場合、finalNumMVPCandを前者よりも大きい数に設定するとしてもよい。 First, the size of a prediction block to be encoded or decoded is obtained (S401). If the size of the prediction block to be encoded or decoded is equal to or smaller than the size sizePUNumMVPCand defined (YES in S402), finalNumMVPCand is set to a number smaller than the latter (S403), otherwise finalNumMVPCand is set to a number larger than the former Set (S404). In the present embodiment, the specified size sizePUNumMVPCand is set to 8x8, and the finalNumMVPCand is set to 1 if the size of the prediction block of the luminance signal to be encoded or decoded is less than the specified size sizePUNumMVPCand, otherwise Set finalNumMVPCand to 2. The prescribed size sizePUNumMVPCand may be a fixed value, or may be set by preparing a syntax element for each sequence, picture, or slice. In addition, if the size is the same size, such as 8x4 and 4x8, multiplied by the width and height, it is considered the same size. That is, when the prescribed size sizePUNumMVPCand is set to 8x4, it is considered that 4x8 is also set. In step S402, if the size of the prediction block to be encoded or decoded is less than the specified size sizePUNumMVPCand, finalNumMVPCand is set to a number smaller than the latter, and if not, finalNumMVPCand is set to a number larger than the former. It is good.
次に、図15のS103、及び図16のS203で共通の予測動きベクトルの候補の導出及び予測動きベクトルリスト構築処理手順を図18のフローチャートを用いて詳細に説明する。 Next, a procedure for derivation of a prediction motion vector candidate common to S103 in FIG. 15 and S203 in FIG. 16 and a prediction motion vector list construction process will be described in detail with reference to the flowchart in FIG.
(動きベクトルの予測方法)
図18は動画像符号化装置の差分動きベクトル算出部103及び動画像復号装置の動きベクトル算出部204とで共通する機能を有する予測動きベクトル候補生成部121及び221、予測動きベクトル候補登録部122及び222、ならびに予測動きベクトル冗長候補削除部123及び223、予測動きベクトル候補数制限部124及び224の処理手順を表すフローチャートである。
(Motion vector prediction method)
FIG. 18 shows motion vector predictor
予測動きベクトル候補生成部121及び221は左側に隣接する予測ブロックからの予測動きベクトルの候補を導出し、左側に隣接する予測ブロックの予測動きベクトル候補が利用できるかどうかを示すフラグavailableFlagLXA、及び動きベクトルmvLXA、参照インデックスrefIdxA、リストListAを導出する(図18のS301)。なお、L0のときXは0、L1のときXは1とする(以下同様)。続いて、予測動きベクトル候補生成部121及び221は上側に隣接する予測ブロックからの予測動きベクトルの候補を導出し、上側に隣接する予測ブロックの予測動きベクトル候補が利用できるかどうかを示すフラグavailableFlagLXB、及び動きベクトルmvLXB、参照インデックスrefIdxB、リストListBを導出する(図18のS302)。図18のステップS301とS302の処理は参照する隣接ブロックの位置と数が異なる点以外は共通であり、予測ブロックの予測動きベクトル候補が利用できるかどうかを示すフラグavailableFlagLXN、及び動きベクトルmvLXN、参照インデックスrefIdxN、ListN(NはAまたはB、以下同様)を導出する共通の導出処理手順を図19〜図23のフローチャートを用いて後ほど詳細に説明する。
The motion vector predictor
続いて、予測動きベクトル候補生成部121及び221は異なる時間のピクチャの予測ブロックからの予測動きベクトルの候補を導出し、異なる時間のピクチャの予測ブロックの予測動きベクトル候補が利用できるかどうかを示すフラグavailableFlagLXCol、及び動きベクトルmvLXCol、参照インデックスrefIdxCol、リストListColを導出する(図18のS303)。このステップS303の導出処理手順を図24〜図30のフローチャートを用いて後ほど詳細に説明する。
Subsequently, the motion vector predictor
続いて、予測動きベクトル候補登録部122及び222は予測動きベクトルリストmvpListLXを作成し、LXのそれぞれの予測ベクトルの候補mvLXA, mvLXB, mvLXColを追加する(図18のS304)。このステップS304の登録処理手順を図31のフローチャートを用いて後ほど詳細に説明する。
Subsequently, the motion vector predictor
続いて、予測動きベクトル冗長候補削除部123及び223は予測動きベクトルリストmvpListLX内で、複数の動きベクトルの候補が同じ値または近い値を持っている場合に、冗長な動きベクトルの候補と判断し、最も小さい順序、即ち最も小さいインデックスiの動きベクトルの候補を除いて冗長な動きベクトルの候補を取り除く(図18のS305)。このステップS305の削除処理手順を図32のフローチャートを用いて後ほど詳細に説明する。
Subsequently, the motion vector redundancy
続いて、予測動きベクトル候補数制限部124及び224は予測動きベクトルリストmvpListLX内に追加された要素の数をカウントし、その数がLXの予測動きベクトル候補数numMVPCandLXに設定され、予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXを規定された最終候補数finalNumMVPCandに制限する。(図18のS306)。このステップS306の制限処理手順を図33のフローチャートを用いて後ほど詳細に説明する。
Subsequently, the motion vector predictor candidate
図18のS301、S302の左側または上側に隣接する予測ブロックから予測動きベクトルの候補をそれぞれ導出する手順について詳細に説明する。 A procedure for deriving motion vector predictor candidates from prediction blocks adjacent to the left or upper side of S301 and S302 in FIG. 18 will be described in detail.
図5、図6、図7、図8に示されるように、同一ピクチャ内の符号化ブロック内部を動き補償する為に定義される予測ブロック(図5、図6、図7、図8中の処理対象の予測ブロック)に隣接する周囲の予測ブロックから予測動きベクトルの候補を導出する。 As shown in FIGS. 5, 6, 7, and 8, a prediction block (in FIG. 5, FIG. 6, FIG. 7, and FIG. 8) that is defined for motion compensation within a coding block in the same picture. A motion vector predictor candidate is derived from surrounding prediction blocks adjacent to the processing target prediction block.
予測動きベクトルの候補は、処理対象の予測ブロックの左側に隣接する予測ブロックAk(k=0,1)、すなわちA0、A1から構成される予測ブロックグループA、上に隣接する予測ブロックBk(k=0,1,2)、すなわちB0、B1、B2から構成される予測ブロックグループBからそれぞれ予測動きベクトルの候補を選出する。 The motion vector predictor candidates are the prediction block Ak (k = 0, 1) adjacent to the left side of the prediction block to be processed, that is, the prediction block group A composed of A0 and A1, and the prediction block Bk (k) adjacent above. = 0, 1, 2), that is, predictive motion vector candidates are selected from the prediction block group B composed of B0, B1, and B2.
次に、図18のS301およびS302の処理手順である左側および上側に隣接する予測ブロックグループNからの予測動きベクトルの候補の導出方法について説明する。図19は前述のスキャン方法1による図18のS301およびS302の予測動きベクトル候補導出処理手順を示すフローチャートである。添え字Xには参照リストを表す0若しくは1、Nには隣接する予測ブロックグループの領域を表すA(左側)またはB(上側)が入る。 Next, a method for deriving prediction motion vector candidates from the prediction block group N adjacent on the left and upper sides, which is the processing procedure of S301 and S302 in FIG. 18, will be described. FIG. 19 is a flowchart showing the predicted motion vector candidate derivation process procedure of S301 and S302 of FIG. Subscript X contains 0 or 1 representing the reference list, and N represents A (left side) or B (upper side) representing the area of the adjacent prediction block group.
左側の予測ブロックから予測動きベクトルの候補を導出するには(図18のS301)、図19でNがAとして符号化または復号対象の予測ブロックの左側に隣接するA0、A1の予測ブロックから予測動きベクトルの候補を、上側の予測ブロックから予測動きベクトルの候補を導出するには(図18のS302)、図19でNがBとして上側に隣接するB0、B1、B2予測ブロックから予測動きベクトルの候補を、それぞれ以下の手順で算出する。 In order to derive motion vector predictor candidates from the left prediction block (S301 in FIG. 18), prediction is performed from prediction blocks A0 and A1 adjacent to the left side of the prediction block to be encoded or decoded in FIG. In order to derive a motion vector candidate from the upper prediction block (S302 in FIG. 18), a motion vector predictor is predicted from the B0, B1, and B2 prediction blocks adjacent to the upper side, where N is B in FIG. The candidates are calculated according to the following procedure.
まず、符号化または復号対象の予測ブロックに隣接する予測ブロックを特定し、それぞれの予測ブロックNk(k=0,1,2、ただし2は上側の予測ブロックグループのみ)が利用できる場合は符号化情報格納メモリ114または符号化情報格納メモリ209に格納されている符号化情報を取得する。ここで取得する隣接する予測ブロックNkの符号化情報は、予測モードPredMode、LXを利用するかどうかを示すフラグpredFlagLX [xNk][yNk]、LXの参照インデックスrefIdxLX [xNk][yNk]、LXの動きベクトルmvLX [xNk][yNk]である。符号化または復号対象の予測ブロックの左側に隣接する予測ブロックグループ(N=A)の場合(S1101のYES)、左下に隣接する予測ブロックA0、左に隣接する予測ブロックA1を特定して符号化情報を取得し(S1102、S1103)、符号化または復号対象の予測ブロックの上側に隣接する予測ブロックグループ(N=B)の場合(S1101のNO)、右上に隣接する予測ブロックB0、上に隣接する予測ブロックB1、左上に隣接する予測ブロックB2を特定して符号化情報を取得する(S1104、S1105、S1106)。なお、隣接する予測ブロックNkが符号化または復号対象予測ブロックを含むスライスの内側に位置する場合は利用でき、外側に位置する場合は利用できない。
First, a prediction block adjacent to a prediction block to be encoded or decoded is specified, and encoding is performed when each prediction block Nk (k = 0, 1, 2, where 2 is only the upper prediction block group) can be used. The encoded information stored in the
次に、予測ブロックグループNから予測動きベクトルが選出されるか否かを示すフラグavailableFlagLXNを0、予測ブロックグループNを代表する動きベクトルmvLXNを(0,0)に設定する(S1107)。 Next, a flag availableFlagLXN indicating whether or not a prediction motion vector is selected from the prediction block group N is set to 0, and a motion vector mvLXN representing the prediction block group N is set to (0, 0) (S1107).
続いて、前述の条件判定1または条件判定2に合致する予測動きベクトル候補を導出する(S1108)。予測ブロックグループN(NはAまたはB)の隣接予測ブロックN0、N1、N2(N2は上側の隣接予測ブロックグループBのみ)の中で、符号化または復号対象予測ブロックで現在対象としている参照リストLXと同じ参照リストLX、または符号化または復号対象予測ブロックで現在対象としている参照リストLXと反対の参照リストLY(Y=!X:現在対象としている参照リストがL0のとき、反対の参照リストはL1、現在対象としている参照リストがL1のとき、反対の参照リストはL0)で同じ参照ピクチャの動きベクトルを持つ予測ブロックを探してその動きベクトルを予測動きベクトル候補とする。
Subsequently, a motion vector predictor candidate that matches
図20は図19のステップS1108の導出処理手順を示すフローチャートである。隣接する予測ブロックNk(k=0,1,2、ただし、2は上側の隣接予測ブロックグループのみ)に対して、kが0,1,2の順番にそれぞれ以下の処理を行う(S1201〜S1207)。NがAの場合下から上にA0,A1の順序で、NがBの場合、右から左にB0,B1,B2の順序で、それぞれ以下の処理を行う。 FIG. 20 is a flowchart showing the derivation process procedure of step S1108 of FIG. For the adjacent prediction block Nk (k = 0, 1, 2, where 2 is only the upper adjacent prediction block group), the following processing is performed in the order of k, 0, 1, 2 (S1201 to S1207). ). When N is A, the following processing is performed in the order of A0 and A1 from bottom to top, and when N is B, the following processing is performed in the order of B0, B1, and B2 from right to left.
隣接する予測ブロックNkが利用でき、予測ブロックNkの予測モードPredModeがイントラ(MODE_INTRA)でない場合(S1202のYES)、前述の条件判定1の条件判定を行う(S1203)。隣接する予測ブロックNkのLXを利用するどうかを示すフラグpredFlagLX [xNk][yNk]が1、即ち隣接する予測ブロックNkが算出対象と同じLXの動きベクトルを用いてインター予測されており、隣接する予測ブロックNkのLXの参照インデックスrefIdxLX[xNk][yNk]と処理対象の予測ブロックのインデックスrefIdxLXが同じ、即ち隣接する予測ブロックNkがLX予測で同じ参照ピクチャを用いてインター予測されている場合(S1203のYES)、ステップS1204に進み、そうでない場合(S1203のNO)、ステップS1205の条件判定を行う。
When the adjacent prediction block Nk can be used and the prediction mode PredMode of the prediction block Nk is not intra (MODE_INTRA) (YES in S1202), the condition determination of the above-described
ステップS1203がYESの場合、フラグavailableFlagLXNが1に設定され、予測ブロックグループNの予測動きベクトルmvLXNが隣接する予測ブロックNkのLXの動きベクトルmvLX[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照インデックスrefIdxNが隣接する予測ブロックNkのLXの参照インデックスrefIdxLX[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照リストListNがLXに設定され(S1204)、本予測動きベクトル候補算出処理を終了する。 When step S1203 is YES, the flag availableFlagLXN is set to 1, the prediction motion vector mvLXN of the prediction block group N is set to the same value as the LX motion vector mvLX [xNk] [yNk] of the adjacent prediction block Nk, and prediction is performed. The reference index refIdxN of the block group N is set to the same value as the LX reference index refIdxLX [xNk] [yNk] of the adjacent prediction block Nk, and the reference list ListN of the prediction block group N is set to LX (S1204). The predicted motion vector candidate calculation process is terminated.
一方、ステップS1203がNOの場合、前述の条件判定2の条件判定を行う(S1205)。隣接する予測ブロックNkのLYを利用するどうかを示すフラグpredFlagLYが1、即ち隣接する予測ブロックNkが算出対象と異なるLYの動きベクトルを用いてインター予測されており、隣接する予測ブロックNkの現在対象としている参照リストLXと反対の参照リストLYの参照ピクチャのPOCと処理対象の予測ブロックのLXの参照ピクチャのPOCが同じ、即ち隣接する予測ブロックNkがLY予測で同じ参照ピクチャを用いてインター予測されている場合(S1205のYES)、ステップS1206に進み、フラグavailableFlagLXNが1に設定され、予測ブロックグループNの予測動きベクトルmvLXNが隣接する予測ブロックNkのLYの動きベクトルmvLY[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照インデックスrefIdxNが隣接する予測ブロックNkのLYの参照インデックスrefIdxLY[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照リストListNがLYに設定され(S1206)、本予測動きベクトル候補算出処理を終了する。
On the other hand, when step S1203 is NO, the condition determination of the above-described
これらの条件に合致しない場合、即ちS1203のNO,またはS1205のNOの場合、kを1増加し、次の隣接予測ブロックの処理(S1201〜S1207)を行い、availableFlagLXNが1になるか、隣接ブロックA1またはB2の処理が終わるまで繰り返す。 If these conditions are not met, that is, if NO in S1203 or NO in S1205, k is incremented by 1 and the next adjacent prediction block processing (S1201 to S1207) is performed, and availableFlagLXN becomes 1 or adjacent block Repeat until A1 or B2 is finished.
続いて、図19のフローチャートに戻り、availableFlagLXNが0のとき(S1109のYES)、即ちステップS1108で予測動きベクトルの候補が算出できなかった場合、前述の条件判定3または条件判定4に合致する予測動きベクトル候補を算出する(S1110)。予測ブロックグループN(NはAまたはB)の隣接ブロックN0、N1、N2(N2は上側の隣接予測ブロックグループBのみ)の中で、符号化または復号対象予測ブロックで現在対象としている参照リストLXと同じ参照リストLX、または符号化または復号対象予測ブロックで現在対象としている参照リストLXと反対の参照リストLY(Y=!X:現在対象としている参照リストがL0のとき、反対の参照リストはL1、現在対象としている参照リストがL1のとき、反対の参照リストはL0)で異なる参照ピクチャの動きベクトルを持つ予測ブロックを探してその動きベクトルを予測動きベクトル候補とする。
Subsequently, returning to the flowchart of FIG. 19, when availableFlagLXN is 0 (YES in S1109), that is, when a motion vector predictor candidate cannot be calculated in step S1108, prediction that matches the above-described
図21は図19のステップS1110の導出処理手順を示すフローチャートである。隣接する予測ブロックNk(k=0,1,2、ただし、2は上側の隣接予測ブロックグループのみ)に対して、kが0,1,2の順番にそれぞれ以下の処理を行う(S1301〜S1307)。NがAの場合下から上にA0,A1の順序で、NがBの場合、右から左にB0,B1,B2の順序で、それぞれ以下の処理を行う。 FIG. 21 is a flowchart showing the derivation process procedure of step S1110 of FIG. For adjacent prediction blocks Nk (k = 0, 1, 2, where 2 is only the upper adjacent prediction block group), the following processing is performed in the order of k, 0, 1, 2 (S1301 to S1307). ). When N is A, the following processing is performed in the order of A0 and A1 from bottom to top, and when N is B, the following processing is performed in the order of B0, B1, and B2 from right to left.
隣接する予測ブロックNkが利用でき、予測ブロックNkの予測モードPredModeがイントラ(MODE_INTRA)でない場合(S1302のYES)、前述の条件判定3の条件判定を行う(S1303)。隣接する予測ブロックNkのLXを利用するどうかを示すフラグpredFlagLX [xNk][yNk]が1、即ち隣接する予測ブロックNkが算出対象と同じLXの動きベクトルを用いてインター予測されている場合、ステップS1304に進み、そうでない場合(S1303のNO)、ステップS1305の条件判定を行う。
When the adjacent prediction block Nk can be used and the prediction mode PredMode of the prediction block Nk is not intra (MODE_INTRA) (YES in S1302), the condition determination of the above-described
ステップS1303がYESの場合、フラグavailableFlagLXNが1に設定され、予測ブロックグループNのmvLXNが隣接する予測ブロックNkのLXの動きベクトルmvLX[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照インデックスrefIdxNが隣接する予測ブロックNkのLXの参照インデックスrefIdxLX[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照リストListNがLXに設定され(S1304)、ステップS1308に進む。 When step S1303 is YES, the flag availableFlagLXN is set to 1, the mvLXN of the prediction block group N is set to the same value as the LX motion vector mvLX [xNk] [yNk] of the adjacent prediction block Nk, and the prediction block group N Is set to the same value as the LX reference index refIdxLX [xNk] [yNk] of the adjacent prediction block Nk, the reference list ListN of the prediction block group N is set to LX (S1304), and the process proceeds to step S1308. .
ステップS1303がNOの場合、前述の条件判定4の条件判定を行う(S1305)。隣接する予測ブロックNkのLYを利用するどうかを示すフラグpredFlagLYが1、即ち隣接する予測ブロックNkが算出対象と異なるLYの動きベクトルを用いてインター予測されている場合(S1305のYES)、フラグavailableFlagLXNが1に設定され、予測ブロックグループNの予測動きベクトルmvLXNが隣接する予測ブロックNkのLYの動きベクトルmvLY[xNk][yNk]と同じ値に設定され、予測ブロックグループNの予測動きベクトルmvLXNが隣接する予測ブロックNkのLYの動きベクトルmvLY[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照インデックスrefIdxNが隣接する予測ブロックNkのLYの参照インデックスrefIdxLY[xNk][yNk]と同じ値に設定され、予測ブロックグループNの参照リストListNがLYに設定され(S1306)、ステップS1308に進む。 When step S1303 is NO, the condition determination of the above-described condition determination 4 is performed (S1305). When the flag predFlagLY indicating whether to use the LY of the adjacent prediction block Nk is 1, that is, when the adjacent prediction block Nk is inter-predicted using a motion vector of LY different from the calculation target (YES in S1305), the flag availableFlagLXN Is set to 1, the prediction motion vector mvLXN of the prediction block group N is set to the same value as the LY motion vector mvLY [xNk] [yNk] of the adjacent prediction block Nk, and the prediction motion vector mvLXN of the prediction block group N is The LY motion vector mvLY [xNk] [yNk] of the adjacent prediction block Nk is set to the same value, and the reference index refIdxN of the prediction block group N is the LY reference index refIdxLY [xNk] [yNk] of the adjacent prediction block Nk , The reference list ListN of the prediction block group N is set to LY (S1306), step The process proceeds to S1308.
一方、これらの条件に合致しない場合(S1303のNO,またはS1305のNOの場合)、kを1増加し、次の隣接予測ブロックの処理(S1301〜S1307)を行い、availableFlagLXNが1になるか、隣接ブロックA1またはB2の処理が終わるまで繰り返し、ステップS1308に進む。 On the other hand, if these conditions are not met (NO in S1303 or NO in S1305), k is incremented by 1, and the next adjacent prediction block is processed (S1301 to S1307), and availableFlagLXN becomes 1, The process is repeated until the processing of the adjacent block A1 or B2 is completed, and the process proceeds to step S1308.
続いて、availableFlagLXNが1のとき(S1308のYES)、mvLXNをスケーリングする(S1309)。このステップS1309の空間予測動きベクトル候補のスケーリング演算処理手順を図22及び図23を用いて説明する。 Subsequently, when availableFlagLXN is 1 (YES in S1308), mvLXN is scaled (S1309). The scaling calculation processing procedure of the spatial prediction motion vector candidate in step S1309 will be described with reference to FIGS.
図22は図21のステップS1309の動きベクトルのスケーリング演算処理手順を示すフローチャートである。 FIG. 22 is a flowchart showing the motion vector scaling calculation processing procedure in step S1309 in FIG.
現在の符号化または復号対象ピクチャのPOCから、隣接予測ブロックのリストListNが参照する参照ピクチャのPOCを減算してピクチャ間距離tdを算出する(S1601)。なお、現在の符号化または復号対象ピクチャよりも隣接予測ブロックのリストListNで参照する参照ピクチャの方が表示順序で前の場合、ピクチャ間距離tdは正の値となり、現在の符号化または復号対象ピクチャよりも隣接予測ブロックの参照リストListNで参照する参照ピクチャの方が表示順序で後の場合、ピクチャ間距離tdは負の値となる。
td=現在の符号化または復号対象ピクチャのPOC−隣接予測ブロックの参照リストListNで参照する参照ピクチャのPOC
The inter-picture distance td is calculated by subtracting the POC of the reference picture referred to by the adjacent prediction block list ListN from the POC of the current encoding or decoding target picture (S1601). If the reference picture referenced in the adjacent prediction block list ListN is earlier in the display order than the current encoding or decoding target picture, the inter-picture distance td becomes a positive value, and the current encoding or decoding target When the reference picture referenced in the reference list ListN of the adjacent prediction block is later in the display order than the picture, the inter-picture distance td is a negative value.
td = POC of current encoding or decoding target picture—POC of reference picture referenced in reference list ListN of adjacent prediction block
現在の符号化または復号対象ピクチャのPOCから現在の符号化または復号対象ピクチャのリストLXが参照する参照ピクチャのPOCを減算してピクチャ間距離tbを算出する(S1602)。なお、現在の符号化または復号対象ピクチャよりも現在の符号化または復号対象ピクチャのリストLXで参照する参照ピクチャの方が表示順序で前の場合、ピクチャ間距離tbは正の値となり、現在の符号化または復号対象ピクチャのリストLXで参照する参照ピクチャの方が表示順序で後の場合、ピクチャ間距離tbは負の値となる。
tb=現在の符号化または復号対象ピクチャのPOC−現在の符号化または復号対象ピクチャの参照リストLXで参照する参照ピクチャのPOC
The inter-picture distance tb is calculated by subtracting the POC of the reference picture referenced by the current encoding or decoding target picture list LX from the POC of the current encoding or decoding target picture (S1602). If the reference picture referenced in the list LX of the current encoding or decoding target picture is earlier than the current encoding or decoding target picture in the display order, the inter-picture distance tb is a positive value. When the reference picture referred to in the encoding or decoding target picture list LX is later in the display order, the inter-picture distance tb is a negative value.
tb = POC of the current encoding or decoding target picture-POC of the reference picture referenced in the reference list LX of the current encoding or decoding target picture
続いて、次式によりmvLXNにスケーリング係数tb/tdを乗じることでスケーリング演算処理を行い(S1603)、スケーリングされた動きベクトルmvLXNを得る。
mvLXN=tb/td*mvLXN
Subsequently, scaling operation processing is performed by multiplying mvLXN by the scaling coefficient tb / td according to the following equation (S1603) to obtain a scaled motion vector mvLXN.
mvLXN = tb / td * mvLXN
また、ステップS1603のスケーリング演算を整数精度の演算で行う場合の例を図23に示す。図23のステップS1604〜S1606の処理が、図22のステップS1603の処理に相当する。 FIG. 23 shows an example of the case where the scaling operation in step S1603 is performed with integer precision arithmetic. The processing in steps S1604 to S1606 in FIG. 23 corresponds to the processing in step S1603 in FIG.
まず、図22のフローチャートと同様に、ピクチャ間距離tdとピクチャ間距離tbを算出する(S1601、S1602)。 First, as in the flowchart of FIG. 22, the inter-picture distance td and the inter-picture distance tb are calculated (S1601, S1602).
続いて、次式により変数txを算出する(S1604)。
tx = ( 16384 + Abs( td / 2 ) ) / td
Subsequently, the variable tx is calculated by the following equation (S1604).
tx = (16384 + Abs (td / 2)) / td
続いて、次式によりスケーリング係数DistScaleFactorを算出する(S1605)。
DistScaleFactor = ( tb * tx + 32 ) >> 6
Subsequently, the scaling coefficient DistScaleFactor is calculated by the following equation (S1605).
DistScaleFactor = (tb * tx + 32) >> 6
続いて、次式により、スケーリングされた動きベクトルmvLXNを得る(S1606)。
mvLXN = ClipMv( Sign( DistScaleFactor * mvLXN ) * ( (Abs( DistScaleFactor * mvLXN ) + 127 ) >> 8 ) )
Subsequently, a scaled motion vector mvLXN is obtained by the following equation (S1606).
mvLXN = ClipMv (Sign (DistScaleFactor * mvLXN) * ((Abs (DistScaleFactor * mvLXN) + 127) >> 8))
次に、図18のS303の異なる時間のピクチャの予測ブロックから予測動きベクトルの候補の導出方法について詳細に説明する。図24は図18のステップS303の予測動きベクトル候補導出処理手順を説明するフローチャートである。 Next, a method of deriving motion vector predictor candidates from the prediction blocks of pictures at different times in S303 in FIG. 18 will be described in detail. FIG. 24 is a flowchart for explaining the prediction motion vector candidate derivation processing procedure in step S303 in FIG.
まず、slice_typeとcollocated_from_l0_flagにより、異なる時間のピクチャcolPicを算出する(図24のS2101)。 First, a picture colPic at a different time is calculated based on slice_type and collocated_from_l0_flag (S2101 in FIG. 24).
図25は図24のステップS2101の異なる時間のピクチャcolPicの導出処理手順を説明するフローチャートである。slice_typeがBで、前述のフラグcollocated_from_l0_flagが0の場合(図25のS2201のYES、S2202のYES)、RefPicList1[0]、すなわち参照リストL1の参照インデックスが0のピクチャが異なる時間のピクチャcolPicとなる(図25のS2203)。そうでない場合、すなわち前述のフラグcollocated_from_l0_flagが1の場合(図25のS2201のNO、S2202のNO、S2204のNO)、RefPicList0[0]、すなわち参照リストL0の参照インデックスが0のピクチャが異なる時間のピクチャcolPicとなる(図25のS2205)。
FIG. 25 is a flowchart for explaining the procedure for deriving the picture colPic at different times in step S2101 of FIG. When slice_type is B and the above-described flag collocated_from_l0_flag is 0 (YES in S2201 in FIG. 25, YES in S2202), RefPicList1 [0], that is, a picture with a
次に、図24のフローチャートに戻り、異なる時間の予測ブロックcolPUを算出し、符号化情報を取得する(図24のS2102)。 Next, returning to the flowchart of FIG. 24, a prediction block colPU at a different time is calculated, and encoded information is acquired (S2102 of FIG. 24).
図26は図24のステップS2102の異なる時間のピクチャcolPicの予測ブロックcolPUの導出処理手順を説明するフローチャートである。 FIG. 26 is a flowchart for explaining the procedure for deriving the prediction block colPU of the picture colPic at different times in step S2102 of FIG.
まず、異なる時間のピクチャcolPic内で処理対象の予測ブロックと同一位置の右下(外側)に位置する予測ブロックを異なる時間の予測ブロックcolPUに設定する(図26のS2301)。この予測ブロックは図9の予測ブロックT0に相当する。 First, a prediction block located in the lower right (outside) of the same position as the processing target prediction block in the picture colPic at a different time is set as a prediction block colPU at a different time (S2301 in FIG. 26). This prediction block corresponds to the prediction block T0 in FIG.
次に、異なる時間の予測ブロックcolPUの符号化情報を取得する(図26のS2302)。異なる時間の予測ブロックcolPUのPredModeがMODE_INTRAか、利用できない場合(図26のS2303、S2304)、異なる時間のピクチャcolPic内で処理対象の予測ブロックと同一位置の中央左上に位置する予測ブロックを異なる時間の予測ブロックcolPUに再設定する(図26のS2305)。この予測ブロックは図9の予測ブロックT1に相当する。 Next, the encoding information of the prediction block colPU at different times is acquired (S2302 in FIG. 26). If PredMode of the prediction block colPU at different time is MODE_INTRA or cannot be used (S2303 and S2304 in FIG. 26), the prediction block located at the upper left center of the same position as the processing target prediction block in the picture colPic at different time is different in time. The prediction block colPU is reset (S2305 in FIG. 26). This prediction block corresponds to the prediction block T1 in FIG.
次に、図24のフローチャートに戻り、符号化または復号対象の予測ブロックと同位置の他ピクチャの予測ブロックから算出されるLXの予測動きベクトルmvLXColと予測ブロックグループColの参照リストLXの符号化情報が有効か否かを示すフラグavailableFlagLXColを算出する(図24のS2103)。 Next, returning to the flowchart of FIG. 24, the LX prediction motion vector mvLXCol calculated from the prediction block of another picture at the same position as the prediction block to be encoded or decoded and the encoding information of the reference list LX of the prediction block group Col The flag availableFlagLXCol indicating whether or not is valid is calculated (S2103 in FIG. 24).
図27は図24のステップS2103のインター予測情報の導出処理を説明するフローチャートである。 FIG. 27 is a flowchart illustrating the inter prediction information derivation process in step S2103 of FIG.
異なる時間の予測ブロックcolPUのPredModeがMODE_INTRAか、利用できない場合(図27のS2401のNO、S2402のNO)、availableFlagLXColを0、mvLXColを(0,0)とし(図27のS2403、S2404)、処理を終了する。 When PredMode of the prediction block colPU at different times is MODE_INTRA or cannot be used (NO in S2401 in FIG. 27, NO in S2402), availableFlagLXCol is set to 0, mvLXCol is set to (0, 0) (S2403, S2404 in FIG. 27), and processing Exit.
予測ブロックcolPUが利用できてPredModeがMODE_INTRAでない場合(図27のS2401のYES、S2402のYES)、以下の手順でmvColとrefIdxColを算出する。 When the prediction block colPU can be used and PredMode is not MODE_INTRA (YES in S2401 and YES in S2402 in FIG. 27), mvCol and refIdxCol are calculated in the following procedure.
予測ブロックcolPUのL0予測が利用されているかどうかを示すフラグPredFlagL0[xPCol][yPCol]が0の場合(図27のS2405のYES)、予測ブロックcolPUの予測モードはPred_L1であるので、動きベクトルmvColが予測ブロックcolPUのL1の動きベクトルであるMvL1[xPCol][yPCol]と同じ値に設定され(図27のS2406)、参照インデックスrefIdxColがL1の参照インデックスRefIdxL1[xPCol][yPCol]と同じ値に設定され(図27のS2407)、リストListColがL1に設定される(図27のS2408)。 When the flag PredFlagL0 [xPCol] [yPCol] indicating whether or not the L0 prediction of the prediction block colPU is used (YES in S2405 in FIG. 27), since the prediction mode of the prediction block colPU is Pred_L1, the motion vector mvCol Is set to the same value as MvL1 [xPCol] [yPCol] which is the L1 motion vector of the prediction block colPU (S2406 in FIG. 27), and the reference index refIdxCol is set to the same value as the reference index RefIdxL1 [xPCol] [yPCol] of L1 It is set (S2407 in FIG. 27), and the list ListCol is set to L1 (S2408 in FIG. 27).
一方、予測ブロックcolPUのL0予測フラグPredFlagL0[xPCol][yPCol]が0でない場合(図27のS2405のNO)、予測ブロックcolPUのL1予測フラグPredFlagL1[xPCol][yPCol]が0かどうかを判定する。予測ブロックcolPUのL1予測フラグPredFlagL1[xPCol][yPCol]が0の場合(図27のS2409のYES)、動きベクトルmvColが予測ブロックcolPUのL0の動きベクトルであるMvL0[xPCol][yPCol]と同じ値に設定され(図27のS2410)、参照インデックスrefIdxColがL0の参照インデックスRefIdxL0[xPCol][yPCol] と同じ値に設定され(図27のS2411)、リストListColがL0に設定される(図27のS2412)。 On the other hand, if the L0 prediction flag PredFlagL0 [xPCol] [yPCol] of the prediction block colPU is not 0 (NO in S2405 in FIG. 27), it is determined whether the L1 prediction flag PredFlagL1 [xPCol] [yPCol] of the prediction block colPU is 0. . When the L1 prediction flag PredFlagL1 [xPCol] [yPCol] of the prediction block colPU is 0 (YES in S2409 in FIG. 27), the motion vector mvCol is the same as MvL0 [xPCol] [yPCol], which is the L0 motion vector of the prediction block colPU. 27 (S2410 in FIG. 27), the reference index refIdxCol is set to the same value as the reference index RefIdxL0 [xPCol] [yPCol] of L0 (S2411 in FIG. 27), and the list ListCol is set to L0 (FIG. 27). S2412).
予測ブロックcolPUのL0予測フラグPredFlagL0[xPCol][yPCol]と予測ブロックcolPUのL1予測フラグPredFlagL1[xPCol][yPCol]が共に0でない場合(図27のS2405のNO,S2409のNO)、予測ブロックcolPUのインター予測モードは双予測(Pred_BI)であるので、L0、L1の2つの動きベクトルから、一方を選択する(図27のS2413)。 If both the L0 prediction flag PredFlagL0 [xPCol] [yPCol] of the prediction block colPU and the L1 prediction flag PredFlagL1 [xPCol] [yPCol] of the prediction block colPU are not 0 (NO in S2405 in FIG. 27, NO in S2409), the prediction block colPU Since the inter prediction mode is bi-prediction (Pred_BI), one of the two motion vectors L0 and L1 is selected (S2413 in FIG. 27).
図28は予測ブロックcolPUのインター予測モードが双予測(Pred_BI)のときの予測ブロックのインター予測情報の導出処理手順を示すフローチャートである。 FIG. 28 is a flowchart illustrating a procedure for deriving inter prediction information of a prediction block when the inter prediction mode of the prediction block colPU is bi-prediction (Pred_BI).
まず、すべての参照リストに登録されているすべてのピクチャのPOCが現在の符号化または復号対象ピクチャのPOCより小さいかどうかを判定し(S2501)、予測ブロックcolPUのすべての参照リストであるL0及びL1に登録されているすべてのピクチャのPOCが現在の符号化または復号対象ピクチャのPOCより小さい場合で(S2501のYES)、Xが0、即ち符号化または復号対象の予測ブロックのL0の動きベクトルの予測ベクトル候補を算出している場合(S2502のYES)、予測ブロックcolPUのL0の方のインター予測情報を選択し、Xが1、即ち符号化または復号対象の予測ブロックのL1の動きベクトルの予測ベクトル候補を算出している場合(S2502のNO)、予測ブロックcolPUのL1の方のインター予測情報を選択する。一方、予測ブロックcolPUのすべての参照リストL0及びL1に登録されているピクチャのPOCの少なくとも1つが現在の符号化または復号対象ピクチャのPOCより大きい場合で(S2501のNO)、フラグcollocated_from_l0_flagが0場合(S2503のYES)、予測ブロックcolPUのL0の方のインター予測情報を選択し、フラグcollocated_from_l0_flagが1の場合(S2503のNO)、予測ブロックcolPUのL1の方のインター予測情報を選択する。 First, it is determined whether the POC of all pictures registered in all reference lists is smaller than the POC of the current encoding or decoding target picture (S2501), and L0 and all reference lists of the prediction block colPU are determined. When the POC of all the pictures registered in L1 is smaller than the POC of the current encoding or decoding target picture (YES in S2501), X is 0, that is, the L0 motion vector of the prediction block to be encoded or decoding When the prediction vector candidate is calculated (YES in S2502), the inter prediction information of L0 of the prediction block colPU is selected, and X is 1, that is, the motion vector of L1 of the prediction block to be encoded or decoded. When the prediction vector candidate is calculated (NO in S2502), the prediction block colPU in the L1 direction is calculated. To select the measurement information. On the other hand, when at least one of the POCs of pictures registered in all the reference lists L0 and L1 of the prediction block colPU is larger than the POC of the current encoding or decoding target picture (NO in S2501), and the flag collocated_from_l0_flag is 0 (YES in S2503), the L0 inter prediction information of the prediction block colPU is selected. If the flag collocated_from_l0_flag is 1 (NO in S2503), the L1 inter prediction information of the prediction block colPU is selected.
予測ブロックcolPUのL0の方のインター予測情報を選択する場合(S2502のYES、S2503のYES)、動きベクトルmvColがMvL0[xPCol][yPCol]と同じ値に設定され(S2504)、参照インデックスrefIdxColがRefIdxL0[xPCol][yPCol]と同じ値に設定され(S2505)、リストListColがL0に設定される(S2506)。 When the inter prediction information of L0 of the prediction block colPU is selected (YES in S2502, YES in S2503), the motion vector mvCol is set to the same value as MvL0 [xPCol] [yPCol] (S2504), and the reference index refIdxCol is set. The same value as RefIdxL0 [xPCol] [yPCol] is set (S2505), and the list ListCol is set to L0 (S2506).
予測ブロックcolPUのL1の方のインター予測情報を選択する場合(S2502のNO、S2503のNO)、動きベクトルmvColがMvL1[xPCol][yPCol]と同じ値に設定され(S2507)、参照インデックスrefIdxColがRefIdxL1[xPCol][yPCol]と同じ値に設定され(S2508)、リストListColがL1に設定される(S2509)。 When the inter prediction information of L1 of the prediction block colPU is selected (NO in S2502 and NO in S2503), the motion vector mvCol is set to the same value as MvL1 [xPCol] [yPCol] (S2507), and the reference index refIdxCol is set. The same value as RefIdxL1 [xPCol] [yPCol] is set (S2508), and the list ListCol is set to L1 (S2509).
図27に戻り、予測ブロックcolPUからインター予測情報が取得できたらavailableFlagLXColを1とする(図27のS2414)。 Returning to FIG. 27, if inter prediction information can be acquired from the prediction block colPU, the availableFlagLXCol is set to 1 (S2414 in FIG. 27).
次に、図24のフローチャートに戻り、availableFlagLXColが1の場合(図24のS2104のYES)、必要に応じてmvLXColをスケーリングする(図24のS2105)。この動きベクトルmvLXColのスケーリング演算処理手順を図29及び図30を用いて説明する。 Next, returning to the flowchart of FIG. 24, when availableFlagLXCol is 1 (YES in S2104 of FIG. 24), mvLXCol is scaled as necessary (S2105 of FIG. 24). A procedure for scaling operation of the motion vector mvLXCol will be described with reference to FIGS.
図29は図24のステップS2105の動きベクトルのスケーリング演算処理手順を示すフローチャートである。 FIG. 29 is a flowchart showing the motion vector scaling calculation processing procedure in step S2105 of FIG.
異なる時間のピクチャcolPicのPOCから、予測ブロックcolPUのリストListColで参照する参照ピクチャのPOCを減算してピクチャ間距離tdを算出する(S2601)。なお、異なる時間のピクチャcolPicよりも予測ブロックcolPUのリストListColで参照する参照ピクチャのPOCの方が表示順序で前の場合、ピクチャ間距離tdは正の値となり、異なる時間のピクチャcolPicよりも予測ブロックcolPUのリストListColで参照する参照ピクチャのPOCの方が表示順序で後の場合、ピクチャ間距離tdは負の値となる。
td=異なる時間のピクチャcolPicのPOC−予測ブロックcolPUのリストListColで参照する参照ピクチャのPOC
The inter-picture distance td is calculated by subtracting the POC of the reference picture referenced in the list ListCol of the prediction block colPU from the POC of the picture colPic at a different time (S2601). Note that when the POC of the reference picture referenced in the list Col of the prediction block colPU is earlier in the display order than the picture colPic at a different time, the inter-picture distance td is a positive value, and the prediction is more accurate than the picture colPic at a different time. When the POC of the reference picture referenced in the list ListCol of the block colPU is later in the display order, the inter-picture distance td becomes a negative value.
td = POC of picture colPic at different time-POC of reference picture referenced by list ListCol of prediction block colPU
現在の符号化または復号対象ピクチャのPOCから現在の符号化または復号対象ピクチャのリストLXが参照する参照ピクチャのPOCを減算してピクチャ間距離tbを算出する(S2602)。なお、現在の符号化または復号対象ピクチャよりも現在の符号化または復号対象ピクチャのリストLXで参照する参照ピクチャの方が表示順序で前の場合、ピクチャ間距離tbは正の値となり、現在の符号化または復号対象ピクチャのリストLXで参照する参照ピクチャの方が表示順序で後の場合、ピクチャ間距離tbは負の値となる。
tb=現在の符号化または復号対象ピクチャのPOC−現在の符号化または復号対象ピクチャの参照リストLXで参照する参照ピクチャのPOC
The inter-picture distance tb is calculated by subtracting the POC of the reference picture referenced by the current encoding or decoding target picture list LX from the POC of the current encoding or decoding target picture (S2602). If the reference picture referenced in the list LX of the current encoding or decoding target picture is earlier than the current encoding or decoding target picture in the display order, the inter-picture distance tb is a positive value. When the reference picture referred to in the encoding or decoding target picture list LX is later in the display order, the inter-picture distance tb is a negative value.
tb = POC of the current encoding or decoding target picture-POC of the reference picture referenced in the reference list LX of the current encoding or decoding target picture
続いて、ピクチャ間距離tdとtbを比較し(S2603)、ピクチャ間距離tdとtbが等しい場合(S2603のYES)、本スケーリング演算処理を終了する。ピクチャ間距離tdとtbが等しくない場合(S2603のNO)、次式によりmvLXColにスケーリング係数tb/tdを乗じることでスケーリング演算処理を行い(S2604)スケーリングされた動きベクトルmvLXColを得る。
mvLXCol=tb/td*mvLXCol
Subsequently, the inter-picture distances td and tb are compared (S2603). If the inter-picture distances td and tb are equal (YES in S2603), the scaling calculation process ends. When the inter-picture distances td and tb are not equal (NO in S2603), scaling operation processing is performed by multiplying mvLXCol by the scaling coefficient tb / td according to the following equation (S2604) to obtain a scaled motion vector mvLXCol.
mvLXCol = tb / td * mvLXCol
また、ステップS2604のスケーリング演算を整数精度の演算で行う場合の例を図30に示す。図30のステップS2605〜S2607の処理が、図29のステップS2604の処理に相当する。 FIG. 30 shows an example of the case where the scaling operation in step S2604 is performed with integer precision arithmetic. The processing in steps S2605 to S2607 in FIG. 30 corresponds to the processing in step S2604 in FIG.
まず、図29のフローチャートと同様に、ピクチャ間距離tdとピクチャ間距離tbを算出する(S2601、S2602)。 First, as in the flowchart of FIG. 29, the inter-picture distance td and the inter-picture distance tb are calculated (S2601, S2602).
続いて、ピクチャ間距離tdとtbを比較し(S2603)、ピクチャ間距離tdとtbが等しい場合(S2603のYES)、本スケーリング演算処理を終了する。ピクチャ間距離tdとtbが等しくない場合(S2603のNO)、次式により変数txを算出する(S2605)。
tx = ( 16384 + Abs( td / 2 ) ) / td
Subsequently, the inter-picture distances td and tb are compared (S2603). If the inter-picture distances td and tb are equal (YES in S2603), the scaling calculation process ends. If the inter-picture distances td and tb are not equal (NO in S2603), a variable tx is calculated by the following equation (S2605).
tx = (16384 + Abs (td / 2)) / td
続いて、次式によりスケーリング係数DistScaleFactorを算出する(S2606)。
DistScaleFactor = ( tb * tx + 32 ) >> 6
Subsequently, the scaling coefficient DistScaleFactor is calculated by the following equation (S2606).
DistScaleFactor = (tb * tx + 32) >> 6
続いて、次式により、スケーリングされた動きベクトルmvLXNを得る(S2607)。
mvLXN = ClipMv( Sign( DistScaleFactor * mvLXN ) * ( (Abs( DistScaleFactor * mvLXN ) + 127 ) >> 8 ) )
Subsequently, a scaled motion vector mvLXN is obtained by the following equation (S2607).
mvLXN = ClipMv (Sign (DistScaleFactor * mvLXN) * ((Abs (DistScaleFactor * mvLXN) + 127) >> 8))
図18のS304の予測動きベクトルの候補を予測動きベクトルリストに追加する手順について詳細に説明する。 The procedure for adding the predicted motion vector candidate in S304 of FIG. 18 to the predicted motion vector list will be described in detail.
図18のS301、S302、及びS303にて算出されたLXのそれぞれの予測動きベクトルの候補mvLXA, mvLXB, mvLXColをLXの予測動きベクトルリストmvpListLXに追加する(S304)。本発明の実施の形態では、優先順位をつけて、優先順位の高いものからLXの予測動きベクトルリストmvpListLXに予測動きベクトルの候補mvLXA, mvLXB, mvLXColを登録することで、優先順位の高い要素を予測動きベクトルリストの前方に配置する。図18のS306で予測動きベクトルリストの中の要素数を制限する際に、予測動きベクトルリストの後方に配置された要素を予測動きベクトルリストから外すことで、優先順位の高い要素を残す。 The prediction motion vector candidates mvLXA, mvLXB, and mvLXCol of the LX calculated in S301, S302, and S303 of FIG. 18 are added to the LX prediction motion vector list mvpListLX (S304). In the embodiment of the present invention, by assigning priorities and registering predicted motion vector candidates mvLXA, mvLXB, and mvLXCol in the LX predicted motion vector list mvpListLX in order of priority, elements having higher priorities are registered. It is arranged in front of the predicted motion vector list. When limiting the number of elements in the motion vector predictor list in S306 of FIG. 18, the elements arranged at the rear of the motion vector predictor list are removed from the motion vector predictor list to leave the elements with higher priority.
予測動きベクトルリストmvpListLXはリスト構造を成し、予測動きベクトルリスト内部の所在を示すインデックスiで管理され、インデックスiに対応する予測動きベクトルの候補を要素として格納する記憶領域が設けられている。インデックスiの数字は0から開始され、予測動きベクトルリストmvpListLXの記憶領域に、予測動きベクトルの候補が格納される。以降の処理では、予測動きベクトルリストmvpListLXに登録されたインデックスiの要素である予測動きベクトルの候補は、mvpListLX[i]で表す。 The motion vector predictor list mvpListLX has a list structure, is managed by an index i indicating the location inside the motion vector predictor list, and has a storage area for storing a motion vector predictor candidate corresponding to the index i as an element. The number of the index i starts from 0, and motion vector predictor candidates are stored in the storage area of the motion vector predictor list mvpListLX. In the subsequent processing, a motion vector predictor candidate that is an element of the index i registered in the motion vector predictor list mvpListLX is represented by mvpListLX [i].
次に、図18のS304のLXの予測動きベクトルリストmvpListLXへのLXの予測動きベクトルの候補mvLXA, mvLXB, mvLXColの登録処理方法について詳細に説明する。図31は図18のステップS304の予測動きベクトル候補登録処理手順を示すフローチャートである。 Next, the registration processing method of LX predicted motion vector candidates mvLXA, mvLXB, and mvLXCol to the LX predicted motion vector list mvpListLX in S304 of FIG. 18 will be described in detail. FIG. 31 is a flowchart showing the motion vector predictor candidate registration processing procedure in step S304 of FIG.
まず、予測動きベクトルリストmvpListLXのインデックスiを0に設定する(S3101)。availableFlagLXAが1の場合(S3102のYES)、予測動きベクトルリストmvpListLXのインデックスiに対応する位置にLXの予測動きベクトル候補mvLXAを登録し(S3103)、インデックスiに1を加算することで更新する(S3104)。 First, the index i of the motion vector predictor list mvpListLX is set to 0 (S3101). When availableFlagLXA is 1 (YES in S3102), the LX predicted motion vector candidate mvLXA is registered at the position corresponding to the index i in the predicted motion vector list mvpListLX (S3103), and is updated by adding 1 to the index i (S3103). S3104).
続いて、availableFlagLXBが1の場合(S3105のYES)、予測動きベクトルリストmvpListLXmvpListLXのインデックスiに対応する位置にLXの予測動きベクトル候補mvLXBを登録し(S3106)、インデックスiに1を加算することで更新する(S3107)。 Subsequently, when availableFlagLXB is 1 (YES in S3105), an LX predicted motion vector candidate mvLXB is registered at a position corresponding to the index i of the predicted motion vector list mvpListLXmvpListLX (S3106), and 1 is added to the index i. Update (S3107).
続いて、availableFlagLXColが1の場合(S3108のYES)、予測動きベクトルリストmvpListLXのインデックスiに対応する位置にLXの予測動きベクトル候補mvLXColを登録し(S3109)、予測動きベクトルリストへの登録処理を終了する。 Subsequently, when availableFlagLXCol is 1 (YES in S3108), the LX predicted motion vector candidate mvLXCol is registered at the position corresponding to the index i of the predicted motion vector list mvpListLX (S3109), and the registration process to the predicted motion vector list is performed. finish.
以上の処理においては、LXのそれぞれの予測動きベクトルの候補をmvLXA, mvLXB, mvLXColの順序でLXの予測動きベクトルリストmvpListLXに追加したが、予測ブロックが規定のサイズ以下で候補数が1となる場合で、分割モード(PartMode)が2N×N分割(PART_2NxN)で分割インデックスPartIdxが0となる場合、または分割モード(PartMode)がN×2N分割(PART_Nx2N)で分割インデックスPartIdxが1となる場合に、LXのそれぞれの予測動きベクトルの候補をmvLXB, mvLXA, mvLXColの順序で予測動きベクトルリストmvpListLXに追加することにより、符号化または復号対象の予測ブロックの動きベクトルに近い値を持つ可能性の高い予測動きベクトルmvLXBが選択され易くするために予測動きベクトルリストの先頭に登録することで、差分動きベクトルの符号量を削減することができる。このように、予測動きベクトル候補数制限部124は、符号化または復号対象ブロックを予測ブロックに分割する分割モードに応じて、予測動きベクトル候補リストに残される予測動きベクトルの候補の優先順位を設定する。
In the above processing, the respective motion vector candidates for LX are added to the motion vector list mvpListLX for LX in the order of mvLXA, mvLXB, and mvLXCol. However, the number of candidates is 1 when the predicted block is smaller than the prescribed size. When the partition mode (PartMode) is 2N × N partition (PART_2NxN) and the partition index PartIdx is 0, or the partition mode (PartMode) is N × 2N partition (PART_Nx2N) and the partition index PartIdx is 1 , LX candidates of motion vectors are added to the motion vector predictor list mvpListLX in the order of mvLXB, mvLXA, mvLXCol, so that there is a high possibility of having a value close to the motion vector of the prediction block to be encoded or decoded To make it easier to select the motion vector predictor mvLXB, register it at the head of the motion vector predictor list to reduce the code amount of the motion vector difference Door can be. As described above, the motion vector predictor candidate
図4(b)に示す、分割モード(PartMode)が2N×N分割(PART_2NxN)において、分割インデックスPartIdxが0となる上側の予測ブロックの動きベクトルは長い辺に接している上側の予測ブロックグループからの予測動きベクトルに近い動きベクトルの値を持つ可能性が高いので、上側の予測ブロックグループからの候補mvLXBを優先的に選択され易くするために予測動きベクトルリストの前方に登録し、分割インデックスPartIdxが1となる下側の予測ブロックの動きベクトルは上側の予測ブロックと異なる動きベクトルの値を持つ可能性が高いので、左側の予測ブロックグループからの予測動きベクトルの候補mvLXAを優先的に選択されやすくするために予測動きベクトルリストの前方に登録する。 In the partition mode (PartMode) shown in FIG. 4B, in the 2N × N partition (PART_2NxN), the motion vector of the upper prediction block in which the partition index PartIdx is 0 is from the upper prediction block group in contact with the long side. Since it is highly possible to have a motion vector value close to that of the predicted motion vector, the candidate mvLXB from the upper predicted block group is registered in front of the predicted motion vector list so that it can be preferentially selected, and the partition index PartIdx Since the motion vector of the lower prediction block where 1 is 1 is likely to have a different motion vector value from the upper prediction block, the motion vector candidate mvLXA from the left prediction block group is preferentially selected. In order to facilitate, it is registered in front of the motion vector predictor list.
図4(c)に示す、分割モード(PartMode)がN×2N分割(PART_Nx2N)において、分割インデックスPartIdxが0となる左側の予測ブロックの動きベクトルは長い辺に接している左側の予測ブロックグループからの予測動きベクトルに近い動きベクトルの値を持つ可能性が高いので、左側の予測ブロックグループからの候補mvLXAを優先的に選択されやすくするために予測動きベクトルリストの前方に登録し、分割インデックスPartIdxが1となる右側の予測ブロックの動きベクトルは左側の予測ブロックと異なる動きベクトルの値を持つ可能性が高いので、上側の予測ブロックグループからの予測動きベクトルの候補mvLXBを優先的に選択されやすくするために予測動きベクトルリストの前方に登録する。 In the partition mode (PartMode) shown in FIG. 4C, when the partition mode (PartMode) is N × 2N partition (PART_Nx2N), the motion vector of the left prediction block in which the partition index PartIdx is 0 is obtained from the left prediction block group in contact with the long side. Since it is highly likely that the motion vector value is close to the predicted motion vector, the candidate mvLXA from the left predicted block group is registered in front of the predicted motion vector list so that the candidate mvLXA can be preferentially selected, and the partition index PartIdx Since the motion vector of the right prediction block with a value of 1 is likely to have a motion vector value different from that of the left prediction block, it is easy to preferentially select the prediction motion vector candidate mvLXB from the upper prediction block group. In order to do so, it is registered in front of the motion vector predictor list.
図34は予測ブロックのサイズ、分割モード(PartMode)及び分割インデックスPartIdxに応じて、LXの予測動きベクトルリストmvpListLXへのLXの予測動きベクトルの候補mvLXA, mvLXB, mvLXColの順序を適応的に切り替える登録処理手順を示すフローチャートである。 FIG. 34 shows registration that adaptively switches the order of LX predicted motion vector candidates mvLXA, mvLXB, and mvLXCol to the LX predicted motion vector list mvpListLX according to the size of the prediction block, the partition mode (PartMode), and the partition index PartIdx. It is a flowchart which shows a process sequence.
まず、予測ブロックが規定のサイズ以下で(S3201のYES)、分割モード(PartMode)が2N×N分割(PART_2NxN)で分割インデックスPartIdxが0であるかまたは分割モード(PartMode)がN×2N分割(PART_Nx2N)で分割インデックスPartIdxが1である場合に(S3202のYES)、図35の処理手順で、LXの予測動きベクトルの候補mvLXB, mvLXA, mvLXColの順序でLXの予測動きベクトルリストmvpListLXに登録する(S3203)。以上の条件に合致しない場合(S3201のNO、S3202のNO)、前述の図31の処理手順で、LXの予測動きベクトルの候補mvLXA, mvLXB, mvLXColの順序でLXの予測動きベクトルリストmvpListLXに登録する(S3204)。 First, the prediction block is smaller than the prescribed size (YES in S3201), the partition mode (PartMode) is 2N × N partition (PART_2NxN) and the partition index PartIdx is 0, or the partition mode (PartMode) is N × 2N partition ( PART_Nx2N) and the partition index PartIdx is 1 (YES in S3202), the LX predicted motion vector list mvpListLX is registered in the order of LX predicted motion vector candidates mvLXB, mvLXA, and mvLXCol in the processing procedure of FIG. (S3203). If the above conditions are not met (NO in S3201 and NO in S3202), the LX predicted motion vector candidates mvLXA, mvLXB, and mvLXCol are registered in the LX predicted motion vector list mvpListLX in the above-described processing procedure of FIG. (S3204).
図35は予測ブロックのサイズ、分割モード(PartMode)及び分割インデックスPartIdxに応じて、LXの予測動きベクトルリストmvpListLXへのLXの予測動きベクトルの候補mvLXB, mvLXA, mvLXColの順序での登録処理手順を示すフローチャートである。 FIG. 35 shows a registration processing procedure in the order of LX predicted motion vector candidates mvLXB, mvLXA, and mvLXCol to the LX predicted motion vector list mvpListLX according to the size of the prediction block, the partition mode (PartMode), and the partition index PartIdx. It is a flowchart to show.
まず、予測動きベクトルリストmvpListLXのインデックスiを0に設定する(S3301)。availableFlagLXBが1の場合(S3302のYES)、予測動きベクトルリストmvpListLXのインデックスiに対応する位置にmvLXBを登録し(S3303)、インデックスiに1を加算することで更新する(S3304)。 First, the index i of the motion vector predictor list mvpListLX is set to 0 (S3301). If availableFlagLXB is 1 (YES in S3302), mvLXB is registered at a position corresponding to the index i of the motion vector predictor list mvpListLX (S3303), and is updated by adding 1 to the index i (S3304).
続いて、availableFlagLXAが1の場合(S3305のYES)、予測動きベクトルリストmvpListLXmvpListLXのインデックスiに対応する位置にmvLXAを登録し(S3306)、インデックスiに1を加算することで更新する(S3307)。 Subsequently, when availableFlagLXA is 1 (YES in S3305), mvLXA is registered at a position corresponding to the index i of the motion vector predictor list mvpListLXmvpListLX (S3306), and is updated by adding 1 to the index i (S3307).
続いて、availableFlagLXColが1の場合(S3308のYES)、予測動きベクトルリストmvpListLXのインデックスiに対応する位置にmvLXColを登録し(S3309)、予測動きベクトルリストへの登録処理を終了する。 Subsequently, when availableFlagLXCol is 1 (YES in S3308), mvLXCol is registered at a position corresponding to the index i of the motion vector predictor list mvpListLX (S3309), and the registration process to the motion vector predictor list is terminated.
次に、図18のS305の予測動きベクトルリスト中の冗長な予測動きベクトルの候補の削除方法について詳細に説明する。図32は図18のS305の予測動きベクトル冗長候補削除処理手順を示すフローチャートである。 Next, a method for deleting redundant prediction motion vector candidates in the prediction motion vector list in S305 of FIG. 18 will be described in detail. FIG. 32 is a flowchart showing the predicted motion vector redundant candidate deletion processing procedure in S305 of FIG.
最終候補数finalNumMVPCandが1より大きい場合(S4101のYES)、予測動きベクトル冗長候補削除部123及び223は予測動きベクトルリストmvpListLXに登録されている動きベクトルの候補同士を比較し(S4102)、複数の動きベクトルの候補が同じ値または近い値を持っている場合に(S4103のYES)、冗長な動きベクトルの候補と判断し、最も小さい順序、即ち最も小さいインデックスiの動きベクトルの候補を除いて冗長な動きベクトルの候補を取り除く(S4104)。なお、冗長な動きベクトルの候補を取り除いた後、予測動きベクトルリストmvpListLXの中は、削除された予測動きベクトルの候補の格納領域が空いている為、インデックスiが0を基準にして、インデックスiが小さい予測動きベクトルの候補の順で詰めていく(S4105)。例えば、インデックスiが0の予測動きベクトルの候補mvListLX[0]が削除され、インデックスiが1及び2の予測動きベクトルの候補mvListLX[1], mvListLX[2]が残った場合、インデックスiが1の予測動きベクトルの候補mvListLX[1]を新たにインデックスiが0の予測動きベクトルの候補mvListLX[0]に変更する。さらに、インデックスiが2の予測動きベクトルの候補mvListLX[2]を新たにインデックスiが1の予測動きベクトルの候補mvListLX[1]に変更する。さらに、インデックスiが2の予測動きベクトルの候補mvListLX[2]は存在しないものと設定する。
When the final candidate number finalNumMVPCand is larger than 1 (YES in S4101), the motion vector redundancy
最終候補数finalNumMVPCandが1の場合(S4101のNO)、S305の冗長な予測動きベクトルの候補を削除する処理は行う必要がないので、本冗長候補削除処理を終了する。なぜなら、ステップS306の要素数を制限する処理で、候補数が1つに制限されるからである。 When the final candidate number finalNumMVPCand is 1 (NO in S4101), it is not necessary to perform the process of deleting redundant motion vector predictor candidates in S305, and thus the redundant candidate deletion process is terminated. This is because the number of candidates is limited to one in the process of limiting the number of elements in step S306.
予測ブロックのサイズが小さい場合、単位面積当たりの予測ブロックの数が多くなるので、冗長な予測動きベクトルの候補を削除する処理の回数も多くなってしまう。 When the size of the prediction block is small, the number of prediction blocks per unit area increases, so that the number of processes for deleting redundant prediction motion vector candidates also increases.
そこで、本実施の形態においては、符号化または復号対象の予測ブロックが規定したサイズ以下の場合、最終候補数finalNumMVPCandを1とすることで、冗長な予測動きベクトルの候補を削除する処理をスキップし、処理量を削減している。 Therefore, in this embodiment, when the prediction block to be encoded or decoded is equal to or smaller than the specified size, the final candidate number finalNumMVPCand is set to 1 to skip the process of deleting redundant motion vector predictor candidates. , Reducing the amount of processing.
最終候補数finalNumMVPCandが2で、予測動きベクトルリストmvpListLXに予測動きベクトルの候補mvpLXA、mvpLXB、mvpLXColがすべて登録されて候補数が3の場合、予測動きベクトルリストmvpListLXの予測動きベクトルインデックスが0の要素であるmvpListLX[0]がmvpLXAとなり、予測動きベクトルインデックスが1の要素であるmvpListLX[1]がmvpLXBとなり、予測動きベクトルインデックスが2の要素であるmvpListLX[2]がmvpLXColとなる。この場合、総当たりで比較するにはステップS4102で予測動きベクトルリストmvpListLXの予測動きベクトルインデックスが0の要素であるmvpListLX[0]と予測動きベクトルインデックスが1の要素であるmvpListLX[1]を比較すると共に、予測動きベクトルリストmvpListLXの予測動きベクトルインデックスが0の要素であるmvpListLX[0]と予測動きベクトルインデックスが2の要素であるmvpListLX[2]を比較する必要があり、2回の比較処理が必要となる。しかし、処理量を削減するために、最終候補数finalNumMVPCandが2の場合、ステップS4102で予測動きベクトルリストmvpListLXの予測動きベクトルインデックスが0の要素であるmvpListLX[0]と予測動きベクトルインデックスが1の要素であるmvpListLX[1]だけを比較し、冗長な動きベクトルの候補と判断した場合に予測動きベクトルインデックスが1の要素であるmvpListLX[1]を削除して、予測動きベクトルインデックスが2の要素mvpListLX[2]が存在する場合にその予測動きベクトルインデックスを1に設定して、予測動きベクトルインデックスが1の要素mvpListLX[1]とし、本処理を終了することもできる。この場合、新しい予測動きベクトルインデックスが0の要素であるmvpListLX[0]と予測動きベクトルインデックスが1の要素mvpListLX[1]を比較すると冗長である可能性があるが、仮にこの2つの要素を比較して冗長だと判断した場合に一方を削除して候補数が1となっても、後述のステップS306で、予測動きベクトルインデックスが1の要素mvpListLX[1] として(0, 0)の値を持つ動きベクトルが登録されて候補数が2となる。一方を削除して(0, 0)の値を持つ動きベクトルを登録することによるメリットは小さいと考えられるので予測動きベクトルインデックスが0の要素であるmvpListLX[0]と予測動きベクトルインデックスが1の要素であるmvpListLX[1]だけを比較して処理量を削減することができる。また、空間予測動きベクトル候補mvpLXAとmvpLXBは同じピクチャの予測ブロックから予測動きベクトル候補を導出するので、互いに動き情報が同じになる可能性が高いが、時間予測動きベクトル候補mvpLXColは異なるピクチャの予測ブロックから予測動きベクトル候補を導出するので、空間予測動きベクトル候補mvpLXA, mvpLXBと異なる動き情報となる可能性が高い。したがって、時間予測動きベクトル候補mvpLXColの比較を省略しても影響は小さいと考えられる。このように、最終候補数が2の場合、予測動きベクトルインデックスが0の予測動きベクトル候補と、予測動きベクトルインデックスが1の予測動きベクトル候補とを比較し、予測動きベクトルインデックスが2の予測動きベクトル候補との比較を省略することにより、冗長候補を削除するための条件判定処理の回数を削減することができる。
If the final candidate number finalNumMVPCand is 2, and all of the motion vector candidates mvpLXA, mvpLXB, and mvpLXCol are registered in the motion vector predictor list mvpListLX and the number of candidates is 3, the element of the motion vector predictor list mvpListLX with the motion
次に、図18のS306の予測動きベクトルリスト中の動きベクトルの候補数の制限方法について詳細に説明する。図33は図18のS306の予測動きベクトル候補数制限処理手順を説明するフローチャートである。 Next, the method for limiting the number of motion vector candidates in the predicted motion vector list in S306 of FIG. 18 will be described in detail. FIG. 33 is a flowchart for explaining the predicted motion vector candidate number limit processing procedure in S306 of FIG.
予測動きベクトル候補数制限部124及び予測動きベクトル候補数制限部224はLXの予測動きベクトルリストmvpListLXに登録されているLXの予測動きベクトル候補数numMVPCandLXを規定された最終候補数finalNumMVPCandに制限する。
The predicted motion vector candidate
まず、LXの予測動きベクトルリストmvpListLXに登録されている要素数をカウントし、LXの予測動きベクトル候補数numMVPCandLXに設定する(S5101)。 First, the number of elements registered in the LX prediction motion vector list mvpListLX is counted and set to the number of LX prediction motion vector candidates numMVPCandLX (S5101).
続いて、LXの予測動きベクトル候補数numMVPCandLXが最終候補数finalNumMVPCandよりも小さい場合(S5103のYES)、LXの予測動きベクトルリストmvpListLXのインデックスiが numMVPCandLXに対応する位置に(0, 0)の値を持つ動きベクトルを登録し(S5104)、numMVPCandLXに1を加算する(S5105)。numMVPCandLXとfinalNumMVPCandが同じ値の場合(S5106のYES)、本制限処理を終了し、numMVPCandLXとfinalNumMVPCandが同じ値でない場合(S5106のNO)、同じ値になるまで、ステップS5104とS5105の処理を繰り返す。すなわち、LXの予測動きベクトル候補数numMVPCandLXが最終候補数finalNumMVPCandに達するまで、(0, 0)の値を持つMVを登録する。このように重複して(0, 0)の値を持つMVを登録することにより、予測動きベクトルインデックスが0以上最終候補数finalNumMVPCand未満の範囲内でどのような値をとっても予測動きベクトルを確定することができる。 Subsequently, when the number of predicted motion vectors numMVPCandLX of LX is smaller than the number of final candidates finalNumMVPCand (YES in S5103), the index i of the predicted motion vector list mvpListLX of LX has a value of (0, 0) at the position corresponding to numMVPCandLX. Is registered (S5104), and 1 is added to numMVPCandLX (S5105). If numMVPCandLX and finalNumMVPCand have the same value (YES in S5106), this restriction process is terminated. If numMVPCandLX and finalNumMVPCand are not the same value (NO in S5106), the processes in steps S5104 and S5105 are repeated until they have the same value. That is, MVs having a value of (0, 0) are registered until the LX predicted motion vector candidate number numMVPCandLX reaches the final candidate number finalNumMVPCand. In this way, by registering MVs having a value of (0, 0) overlappingly, the predicted motion vector is determined regardless of the value of the predicted motion vector index within the range of 0 or more and less than the final candidate number finalNumMVPCand. be able to.
一方、LXの予測動きベクトル候補数numMVPCandLXが最終候補数finalNumMVPCandよりも大きい場合(S5103のNO、S5107のYES)、LXの予測動きベクトルリストmvpListLXのインデックスiがfinalNumMVPCand-1より大きいすべての予測動きベクトル候補を削除し(S5108)、numMVPCandLXにfinalNumMVPCandと同じ値を設定して(S5109)、本制限処理を終了する。 On the other hand, when the number of predicted motion vectors numMVPCandLX for LX is larger than the number of final candidates finalNumMVPCand (NO in S5103, YES in S5107), all predicted motion vectors for which the index i of the predicted motion vector list mvpListLX for LX is greater than finalNumMVPCand-1 The candidate is deleted (S5108), the same value as finalNumMVPCand is set in numMVPCandLX (S5109), and this restriction process ends.
LXの予測動きベクトル候補数numMVPCandLXが最終候補数finalNumMVPCandと等しい場合(S5103のNO、S5107のNO)、制限処理を施さずに本制限処理を終了する。 When the number of predicted motion vectors numMVPCandLX of LX is equal to the number of final candidates finalNumMVPCand (NO in S5103, NO in S5107), the limiting process is terminated without performing the limiting process.
本実施の形態においては、予測ブロックのサイズに応じて最終候補数finalNumMVPCandを規定している。なぜなら、予測動きベクトルリストに登録される予測動きベクトルの候補数が予測動きベクトルリストの構築状態に応じて変動すると、復号側では予測動きベクトルリストを構築してからでないと、予測動きベクトルインデックスをエントロピー復号することができないからである。さらに、エントロピー復号が異なる時間のピクチャの予測ブロックから導出された予測動きベクトル候補mvLXColを含む予測動きベクトルリストの構築状態に依存すると、別のピクチャの符号化ビット列の復号時にエラーが発生した際に現在のピクチャの符号化ビット列もその影響を受けて正常にエントロピー復号を続けることができない問題がある。予測ブロックのサイズに応じて最終候補数finalNumMVPCandを固定した数に規定すると、予測動きベクトルリストの構築と独立して、予測動きベクトルインデックスをエントロピー復号することができるとともに、別のピクチャの符号化ビット列の復号時にエラーが発生してもその影響を受けずに現在のピクチャの符号化ビット列のエントロピー復号を続けることができる。 In the present embodiment, the final candidate number finalNumMVPCand is defined according to the size of the prediction block. This is because if the number of motion vector predictor candidates registered in the motion vector predictor list fluctuates according to the state of construction of the motion vector predictor list, the motion vector list on the decoding side must be constructed before the motion vector predictor list is constructed. This is because entropy decoding cannot be performed. Furthermore, if entropy decoding depends on the construction state of the motion vector predictor list including the motion vector candidate mvLXCol derived from the prediction block of the picture at different time, when an error occurs when decoding the encoded bit string of another picture The encoded bit string of the current picture is also affected by this, and there is a problem that entropy decoding cannot be continued normally. If the final candidate number finalNumMVPCand is defined as a fixed number according to the size of the prediction block, the prediction motion vector index can be entropy-decoded independently of the construction of the prediction motion vector list, and an encoded bit string of another picture Even if an error occurs during decoding, it is possible to continue entropy decoding of the encoded bit string of the current picture without being affected by the error.
以上述べた実施の形態の動画像符号化装置が出力する動画像の符号化ストリームは、実施の形態で用いられた符号化方法に応じて復号することができるように特定のデータフォーマットを有しており、動画像符号化装置に対応する動画像復号装置がこの特定のデータフォーマットの符号化ストリームを復号することができる。 The moving image encoded stream output from the moving image encoding apparatus of the embodiment described above has a specific data format so that it can be decoded according to the encoding method used in the embodiment. Therefore, the moving picture decoding apparatus corresponding to the moving picture encoding apparatus can decode the encoded stream of this specific data format.
動画像符号化装置と動画像復号装置の間で符号化ストリームをやりとりするために、有線または無線のネットワークが用いられる場合、符号化ストリームを通信路の伝送形態に適したデータ形式に変換して伝送してもよい。その場合、動画像符号化装置が出力する符号化ストリームを通信路の伝送形態に適したデータ形式の符号化データに変換してネットワークに送信する動画像送信装置と、ネットワークから符号化データを受信して符号化ストリームに復元して動画像復号装置に供給する動画像受信装置とが設けられる。 When a wired or wireless network is used to exchange an encoded stream between a moving image encoding device and a moving image decoding device, the encoded stream is converted into a data format suitable for the transmission form of the communication path. It may be transmitted. In that case, a video transmission apparatus that converts the encoded stream output from the video encoding apparatus into encoded data in a data format suitable for the transmission form of the communication channel and transmits the encoded data to the network, and receives the encoded data from the network Then, a moving image receiving apparatus that restores the encoded stream and supplies the encoded stream to the moving image decoding apparatus is provided.
動画像送信装置は、動画像符号化装置が出力する符号化ストリームをバッファするメモリと、符号化ストリームをパケット化するパケット処理部と、パケット化された符号化データをネットワークを介して送信する送信部とを含む。動画像受信装置は、パケット化された符号化データをネットワークを介して受信する受信部と、受信された符号化データをバッファするメモリと、符号化データをパケット処理して符号化ストリームを生成し、動画像復号装置に提供するパケット処理部とを含む。 The moving image transmitting apparatus is a memory that buffers the encoded stream output from the moving image encoding apparatus, a packet processing unit that packetizes the encoded stream, and transmission that transmits the packetized encoded data via the network. Part. The moving image receiving apparatus generates a coded stream by packetizing the received data, a receiving unit that receives the packetized coded data via a network, a memory that buffers the received coded data, and packet processing. And a packet processing unit provided to the video decoding device.
以上の符号化及び復号に関する処理は、ハードウェアを用いた伝送、蓄積、受信装置として実現することができるのは勿論のこと、ROM(リード・オンリ・メモリ)やフラッシュメモリ等に記憶されているファームウェアや、コンピュータ等のソフトウェアによっても実現することができる。そのファームウェアプログラム、ソフトウェアプログラムをコンピュータ等で読み取り可能な記録媒体に記録して提供することも、有線あるいは無線のネットワークを通してサーバから提供することも、地上波あるいは衛星ディジタル放送のデータ放送として提供することも可能である。 The above processing relating to encoding and decoding can be realized as a transmission, storage, and reception device using hardware, and is stored in a ROM (Read Only Memory), a flash memory, or the like. It can also be realized by firmware or software such as a computer. The firmware program and software program can be recorded on a computer-readable recording medium, provided from a server through a wired or wireless network, or provided as a data broadcast of terrestrial or satellite digital broadcasting Is also possible.
以上、本発明を実施の形態をもとに説明した。実施の形態は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。 The present invention has been described based on the embodiments. The embodiments are exemplifications, and it will be understood by those skilled in the art that various modifications can be made to combinations of the respective constituent elements and processing processes, and such modifications are within the scope of the present invention. .
101 画像メモリ、 102 動きベクトル検出部、 103 差分動きベクトル算出部、 104 インター予測情報推定部、 105 動き補償予測部、 106 予測方法決定部、 107 残差信号生成部、 108 直交変換・量子化部、 109 第1の符号化ビット列生成部、 110 第2の符号化ビット列生成部、 111 多重化部、 112 逆量子化・逆直交変換部、 113 復号画像信号重畳部、 114 符号化情報格納メモリ、 115 復号画像メモリ、 121 予測動きベクトル候補生成部、 122 予測動きベクトル候補登録部、 123 予測動きベクトル冗長候補削除部、 124 予測動きベクトル候補数制限部、 125 予測動きベクトル候補符号量算出部、 126 予測動きベクトル選択部、 127 動きベクトル減算部、 201 分離部、 202 第1符号化ビット列復号部、 203 第2符号化ビット列復号部、 204 動きベクトル算出部、 205 インター予測情報推定部、 206 動き補償予測部、 207 逆量子化・逆直交変換部、 208 復号画像信号重畳部、 209 符号化情報格納メモリ、 210 復号画像メモリ、 221 予測動きベクトル候補生成部、 222 予測動きベクトル候補登録部、 223 予測動きベクトル冗長候補削除部、 224 予測動きベクトル候補数制限部、 225 予測動きベクトル選択部、 226 動きベクトル加算部。 DESCRIPTION OF SYMBOLS 101 Image memory, 102 Motion vector detection part, 103 Difference motion vector calculation part, 104 Inter prediction information estimation part, 105 Motion compensation prediction part, 106 Prediction method determination part, 107 Residual signal generation part, 108 Orthogonal transformation and quantization part 109 first encoded bit string generation unit, 110 second encoded bit string generation unit, 111 multiplexing unit, 112 inverse quantization / inverse orthogonal transform unit, 113 decoded image signal superimposing unit, 114 encoded information storage memory, 115 decoded image memory, 121 prediction motion vector candidate generation unit, 122 prediction motion vector candidate registration unit, 123 prediction motion vector redundant candidate deletion unit, 124 prediction motion vector candidate number limit unit, 125 prediction motion vector candidate code amount calculation unit, 126 Predicted motion vector selection unit, 127 motion Coulter subtraction unit, 201 separation unit, 202 first encoded bit sequence decoding unit, 203 second encoded bit sequence decoding unit, 204 motion vector calculation unit, 205 inter prediction information estimation unit, 206 motion compensation prediction unit, 207 inverse quantization / Inverse orthogonal transform unit, 208 decoded image signal superimposing unit, 209 encoded information storage memory, 210 decoded image memory, 221 prediction motion vector candidate generation unit, 222 prediction motion vector candidate registration unit, 223 prediction motion vector redundant candidate deletion unit, 224 A motion vector predictor candidate limit unit; 225 motion vector predictor selection unit; and 226 motion vector addition unit.
Claims (6)
符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成部と、
所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録部と、
前記予測動きベクトル候補登録部により前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定部と、
前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限部と、
前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択部と、
前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化部とを備えることを特徴とする動画像符号化装置。 A video encoding device that encodes a video using a motion vector in units of blocks obtained by dividing each picture,
First and second motion vector predictor candidates are derived from one of the motion vectors of an encoded block close to the encoding target block in the same picture as the encoding target block, and are different from the encoding target block. either the motion vectors or these blocks in coded picture, a predicted motion vector candidate generation unit for deriving a third candidate predicted motion vector,
A predicted motion vector candidate registration unit that registers the first, second, and third predicted motion vector candidates satisfying a predetermined condition in a predicted motion vector candidate list;
When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list by the motion vector candidate registration unit is the same as the value of the second motion vector predictor candidate, the motion vector predictor candidate list A motion vector predictor redundancy determining unit that deletes the second motion vector predictor candidate from
When the number of motion vector predictor candidates registered in the motion vector predictor candidate list is smaller than a predetermined number (a natural number of 2 or more), repeated motions with the same value are repeated until the number of motion vector predictor candidates reaches a predetermined number. A motion vector predictor candidate restriction unit that registers vector candidates in the motion vector predictor candidate list;
A prediction motion vector selection unit that selects a prediction motion vector of the encoding target block from the prediction motion vector candidate list;
A moving picture encoding apparatus comprising: an encoding unit that encodes information indicating an index of a predicted motion vector to be selected in the predicted motion vector candidate list.
符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、
所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、
前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、
前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、
前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、
前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを備えることを特徴とする動画像符号化方法。 A moving image encoding method for encoding a moving image using a motion vector in units of blocks obtained by dividing each picture,
First and second motion vector predictor candidates are derived from one of the motion vectors of an encoded block close to the encoding target block in the same picture as the encoding target block, and are different from the encoding target block. either the motion vectors or these blocks in coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector,
A predicted motion vector candidate registration step of registering the first, second and third predicted motion vector candidates satisfying a predetermined condition in a predicted motion vector candidate list;
When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list in the motion vector predictor candidate registration step is the same as the value of the second motion vector predictor candidate, the motion vector predictor candidate list A motion vector predictor redundancy determining step for deleting the second motion vector predictor candidate from
When the number of motion vector predictor candidates registered in the motion vector predictor candidate list is smaller than a predetermined number (a natural number of 2 or more), repeated motions with the same value are repeated until the number of motion vector predictor candidates reaches a predetermined number. A predicted motion vector candidate restriction step of registering vector candidates in the predicted motion vector candidate list;
A prediction motion vector selection step of selecting a prediction motion vector of the encoding target block from the prediction motion vector candidate list;
And a coding step for coding information indicating an index of a predicted motion vector to be selected in the predicted motion vector candidate list.
符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、
所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、
前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、
前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、
前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、
前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとをコンピュータに実行させることを特徴とする動画像符号化プログラム。 A moving image encoding program for encoding a moving image using a motion vector in units of blocks obtained by dividing each picture,
First and second motion vector predictor candidates are derived from one of the motion vectors of an encoded block close to the encoding target block in the same picture as the encoding target block, and are different from the encoding target block. either the motion vectors or these blocks in coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector,
A predicted motion vector candidate registration step of registering the first, second and third predicted motion vector candidates satisfying a predetermined condition in a predicted motion vector candidate list;
When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list in the motion vector predictor candidate registration step is the same as the value of the second motion vector predictor candidate, the motion vector predictor candidate list A motion vector predictor redundancy determining step for deleting the second motion vector predictor candidate from
When the number of motion vector predictor candidates registered in the motion vector predictor candidate list is smaller than a predetermined number (a natural number of 2 or more), repeated motions with the same value are repeated until the number of motion vector predictor candidates reaches a predetermined number. A predicted motion vector candidate restriction step of registering vector candidates in the predicted motion vector candidate list;
A prediction motion vector selection step of selecting a prediction motion vector of the encoding target block from the prediction motion vector candidate list;
A moving picture encoding program for causing a computer to execute an encoding step for encoding information indicating an index of a prediction motion vector to be selected in the prediction motion vector candidate list.
パケット化された前記符号化データを送信する送信部とを備え、
前記動画像符号化方法は、
符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、
所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、
前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、
前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、
前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、
前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを有することを特徴とする送信装置。 A packet processing unit that obtains encoded data by packetizing an encoded bit string encoded by a moving image encoding method that encodes a moving image using a motion vector in units of blocks obtained by dividing each picture;
A transmission unit for transmitting the packetized encoded data,
The moving image encoding method includes:
First and second motion vector predictor candidates are derived from one of the motion vectors of an encoded block close to the encoding target block in the same picture as the encoding target block, and are different from the encoding target block. either the motion vectors or these blocks in coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector,
A predicted motion vector candidate registration step of registering the first, second and third predicted motion vector candidates satisfying a predetermined condition in a predicted motion vector candidate list;
When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list in the motion vector predictor candidate registration step is the same as the value of the second motion vector predictor candidate, the motion vector predictor candidate list A motion vector predictor redundancy determining step for deleting the second motion vector predictor candidate from
When the number of motion vector predictor candidates registered in the motion vector predictor candidate list is smaller than a predetermined number (a natural number of 2 or more), repeated motions with the same value are repeated until the number of motion vector predictor candidates reaches a predetermined number. A predicted motion vector candidate restriction step of registering vector candidates in the predicted motion vector candidate list;
A prediction motion vector selection step of selecting a prediction motion vector of the encoding target block from the prediction motion vector candidate list;
And a coding step for coding information indicating an index of a motion vector predictor to be selected in the motion vector predictor candidate list.
パケット化された前記符号化データを送信する送信ステップとを備え、
前記動画像符号化方法は、
符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、
所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、
前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、
前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、
前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、
前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを有することを特徴とする送信方法。 A packet processing step of packetizing an encoded bit string encoded by a moving image encoding method for encoding a moving image using a motion vector in units of blocks obtained by dividing each picture, and obtaining encoded data;
Transmitting the packetized encoded data, and
The moving image encoding method includes:
First and second motion vector predictor candidates are derived from one of the motion vectors of an encoded block close to the encoding target block in the same picture as the encoding target block, and are different from the encoding target block. either the motion vectors or these blocks in coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector,
A predicted motion vector candidate registration step of registering the first, second and third predicted motion vector candidates satisfying a predetermined condition in a predicted motion vector candidate list;
When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list in the motion vector predictor candidate registration step is the same as the value of the second motion vector predictor candidate, the motion vector predictor candidate list A motion vector predictor redundancy determining step for deleting the second motion vector predictor candidate from
When the number of motion vector predictor candidates registered in the motion vector predictor candidate list is smaller than a predetermined number (a natural number of 2 or more), repeated motions with the same value are repeated until the number of motion vector predictor candidates reaches a predetermined number. A predicted motion vector candidate restriction step of registering vector candidates in the predicted motion vector candidate list;
A prediction motion vector selection step of selecting a prediction motion vector of the encoding target block from the prediction motion vector candidate list;
And a coding step for coding information indicating an index of a motion vector predictor to be selected in the motion vector predictor candidate list.
パケット化された前記符号化データを送信する送信ステップとをコンピュータに実行させ、
前記動画像符号化方法は、
符号化対象ブロックと同一ピクチャ内の前記符号化対象ブロックと近接する符号化済みのブロックのいずれかの動きベクトルから、第1及び第2の予測動きベクトル候補を導出し、符号化対象ブロックと異なる符号化済みのピクチャ内のブロックのいずれかの動きベクトルから、第3の予測動きベクトル候補を導出する予測動きベクトル候補生成ステップと、
所定の条件を満たす前記第1、第2及び第3の予測動きベクトル候補を予測動きベクトル候補リストに登録する予測動きベクトル候補登録ステップと、
前記予測動きベクトル候補登録ステップにより前記予測動きベクトル候補リストに登録された前記第1の予測動きベクトル候補の値と前記第2の予測動きベクトル候補の値とが同じとき、前記予測動きベクトル候補リストから第2の予測動きベクトル候補を削除する予測動きベクトル候補冗長判定ステップと、
前記予測動きベクトル候補リストに登録された予測動きベクトル候補の数が所定数(2以上の自然数)よりも小さい場合に、予測動きベクトル候補の数が所定数に達するまで繰り返して同じ値の予測動きベクトル候補を前記予測動きベクトル候補リストに登録する予測動きベクトル候補制限ステップと、
前記予測動きベクトル候補リストから、前記符号化対象ブロックの予測動きベクトルを選択する予測動きベクトル選択ステップと、
前記予測動きベクトル候補リストにおける選択すべき予測動きベクトルのインデックスを示す情報を符号化する符号化ステップとを有することを特徴とする送信プログラム。 A packet processing step of packetizing an encoded bit string encoded by a moving image encoding method for encoding a moving image using a motion vector in units of blocks obtained by dividing each picture, and obtaining encoded data;
Transmitting the packetized encoded data to the computer, and
The moving image encoding method includes:
First and second motion vector predictor candidates are derived from one of the motion vectors of an encoded block close to the encoding target block in the same picture as the encoding target block, and are different from the encoding target block. either the motion vectors or these blocks in coded picture, a predicted motion vector candidate generation step of deriving a third candidate predicted motion vector,
A predicted motion vector candidate registration step of registering the first, second and third predicted motion vector candidates satisfying a predetermined condition in a predicted motion vector candidate list;
When the value of the first motion vector predictor candidate registered in the motion vector predictor candidate list in the motion vector predictor candidate registration step is the same as the value of the second motion vector predictor candidate, the motion vector predictor candidate list A motion vector predictor redundancy determining step for deleting the second motion vector predictor candidate from
When the number of motion vector predictor candidates registered in the motion vector predictor candidate list is smaller than a predetermined number (a natural number of 2 or more), repeated motions with the same value are repeated until the number of motion vector predictor candidates reaches a predetermined number. A predicted motion vector candidate restriction step of registering vector candidates in the predicted motion vector candidate list;
A prediction motion vector selection step of selecting a prediction motion vector of the encoding target block from the prediction motion vector candidate list;
And a coding step for coding information indicating an index of a motion vector predictor to be selected in the motion vector predictor candidate list.
Priority Applications (19)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012214684A JP5884697B2 (en) | 2011-09-28 | 2012-09-27 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| BR122020015070-0A BR122020015070B1 (en) | 2011-09-28 | 2012-09-28 | MOTION IMAGE DECODING DEVICE AND MOTION IMAGE DECODING METHOD |
| KR1020177004757A KR101809880B1 (en) | 2011-09-28 | 2012-09-28 | Video decoding device, video decoding method and recording medium storing video decoding program |
| PCT/JP2012/006225 WO2013046707A1 (en) | 2011-09-28 | 2012-09-28 | Video encoding device, video encoding method, video encoding program, transmitting device, transmitting method and transmitting program; and video decoding device, video decoding method, video decoding program, receiving device, receiving method and receiving program |
| TW105124641A TWI586155B (en) | 2011-09-28 | 2012-09-28 | A motion picture decoding apparatus, a motion picture decoding method, and a recording medium |
| KR1020147011156A KR101617974B1 (en) | 2011-09-28 | 2012-09-28 | Video encoding device, video encoding method, video encoding program, transmitting device, transmitting method and transmitting program, and video decoding device, video decoding method, video decoding program, receiving device, receiving method and receiving program |
| KR1020177004756A KR101809879B1 (en) | 2011-09-28 | 2012-09-28 | Video encoding device, video encoding method and recording medium storing video encoding program |
| KR1020177004758A KR101809881B1 (en) | 2011-09-28 | 2012-09-28 | Video decoding device, video decoding method and recording medium storing video decoding program |
| TW105124639A TWI577184B (en) | 2011-09-28 | 2012-09-28 | A motion picture decoding apparatus, a motion picture decoding method, and a recording medium |
| BR112014007492-5A BR112014007492B1 (en) | 2011-09-28 | 2012-09-28 | MOTION IMAGE CODING DEVICE, MOTION IMAGE CODING METHOD, MOVING IMAGE DECODING DEVICE AND MOTION IMAGE DECODING METHOD |
| TW104140304A TW201626802A (en) | 2011-09-28 | 2012-09-28 | Video encoding device, video encoding method, video encoding program, transmitting device, transmitting method and transmitting program |
| KR1020167010918A KR101711355B1 (en) | 2011-09-28 | 2012-09-28 | Video decoding device, video decoding method and recording medium storing video decoding program |
| TW101135876A TWI523496B (en) | 2011-09-28 | 2012-09-28 | A motion picture coding apparatus, a motion picture coding method, a motion picture coding program, a transmission apparatus, a transmission method and a transmission program, and a motion picture decoding apparatus, a motion picture decoding method, a video decoding program, a reception Apparatus, and a reception method And the receiving program |
| TW105124640A TWI575945B (en) | 2011-09-28 | 2012-09-28 | A motion picture decoding apparatus, a motion picture decoding method, and a recording medium |
| US14/226,268 US9674549B2 (en) | 2011-09-28 | 2014-03-26 | Moving picture coding device, moving picture coding method, moving picture coding program, transmitting device, transmission method and transmission program, and moving picture decoding device, moving picture decoding method, moving picture decoding program, receiving device, reception method and reception program |
| US15/165,164 US9661343B2 (en) | 2011-09-28 | 2016-05-26 | Moving picture coding device, moving picture coding method, moving picture coding program, transmitting device, transmission method and transmission program, and moving picture decoding device, moving picture decoding method, moving picture decoding program, receiving device, reception method and reception program |
| US15/581,301 US9866865B2 (en) | 2011-09-28 | 2017-04-28 | Moving picture decoding device, moving picture decoding method, and moving picture decoding program |
| US15/581,275 US9866864B2 (en) | 2011-09-28 | 2017-04-28 | Moving picture decoding device, moving picture decoding method, and moving picture decoding program |
| US15/581,239 US9924194B2 (en) | 2011-09-28 | 2017-04-28 | Moving picture decoding device, moving picture decoding method, and moving picture decoding program |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011212014 | 2011-09-28 | ||
| JP2011212014 | 2011-09-28 | ||
| JP2012214684A JP5884697B2 (en) | 2011-09-28 | 2012-09-27 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
Related Child Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015239664A Division JP5884936B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239665A Division JP5884937B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239666A Division JP5884938B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239667A Division JP5884939B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2016021637A Division JP6079912B2 (en) | 2011-09-28 | 2016-02-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013085234A JP2013085234A (en) | 2013-05-09 |
| JP2013085234A5 JP2013085234A5 (en) | 2016-01-28 |
| JP5884697B2 true JP5884697B2 (en) | 2016-03-15 |
Family
ID=48529941
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012214684A Active JP5884697B2 (en) | 2011-09-28 | 2012-09-27 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239667A Active JP5884939B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239664A Active JP5884936B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239666A Active JP5884938B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239665A Active JP5884937B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2016021637A Active JP6079912B2 (en) | 2011-09-28 | 2016-02-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
Family Applications After (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015239667A Active JP5884939B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239664A Active JP5884936B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239666A Active JP5884938B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2015239665A Active JP5884937B1 (en) | 2011-09-28 | 2015-12-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
| JP2016021637A Active JP6079912B2 (en) | 2011-09-28 | 2016-02-08 | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program |
Country Status (1)
| Country | Link |
|---|---|
| JP (6) | JP5884697B2 (en) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3306927A1 (en) * | 2016-10-05 | 2018-04-11 | Thomson Licensing | Encoding and decoding methods and corresponding devices |
| JP7100200B2 (en) | 2018-06-29 | 2022-07-12 | 北京字節跳動網絡技術有限公司 | Partial / all pruning when adding HMVP candidates to merge / AMVP |
| EP3797516A1 (en) | 2018-06-29 | 2021-03-31 | Beijing Bytedance Network Technology Co. Ltd. | Interaction between lut and amvp |
| CN110662059B (en) | 2018-06-29 | 2021-04-20 | 北京字节跳动网络技术有限公司 | Method and apparatus for storing previously encoded motion information using a lookup table and encoding subsequent blocks using the same |
| KR102611261B1 (en) | 2018-06-29 | 2023-12-08 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | Distinguish between update target LUT or non-update LUT |
| WO2020003283A1 (en) | 2018-06-29 | 2020-01-02 | Beijing Bytedance Network Technology Co., Ltd. | Conditions for updating luts |
| JP7256265B2 (en) * | 2018-06-29 | 2023-04-11 | 北京字節跳動網絡技術有限公司 | Lookup table update: FIFO, limited FIFO |
| WO2020003270A1 (en) | 2018-06-29 | 2020-01-02 | Beijing Bytedance Network Technology Co., Ltd. | Number of motion candidates in a look up table to be checked according to mode |
| TWI719526B (en) | 2018-07-02 | 2021-02-21 | 大陸商北京字節跳動網絡技術有限公司 | Update of look up tables |
| CN111064959B (en) | 2018-09-12 | 2023-09-01 | 北京字节跳动网络技术有限公司 | How many HMVP candidates to examine |
| EP3888355A4 (en) | 2019-01-10 | 2022-03-23 | Beijing Bytedance Network Technology Co., Ltd. | Invoke of lut updating |
| WO2020143824A1 (en) | 2019-01-13 | 2020-07-16 | Beijing Bytedance Network Technology Co., Ltd. | Interaction between lut and shared merge list |
| WO2020147773A1 (en) | 2019-01-16 | 2020-07-23 | Beijing Bytedance Network Technology Co., Ltd. | Inserting order of motion candidates in lut |
| WO2020192611A1 (en) | 2019-03-22 | 2020-10-01 | Beijing Bytedance Network Technology Co., Ltd. | Interaction between merge list construction and other tools |
| WO2020244569A1 (en) | 2019-06-04 | 2020-12-10 | Beijing Bytedance Network Technology Co., Ltd. | Conditional implementation of motion candidate list construction process |
| CN114128295B (en) | 2019-07-14 | 2024-04-12 | 北京字节跳动网络技术有限公司 | Construction of geometric partition mode candidate list in video coding and decoding |
| CN114450959A (en) | 2019-09-28 | 2022-05-06 | 北京字节跳动网络技术有限公司 | Geometric partitioning mode in video coding and decoding |
| CN112565789B (en) * | 2019-11-13 | 2021-09-17 | 腾讯科技(深圳)有限公司 | Video decoding and encoding method, device, computer readable medium and electronic equipment |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120213288A1 (en) * | 2009-10-20 | 2012-08-23 | Yoshihiro Kitaura | Video encoding device, video decoding device, and data structure |
| US9485518B2 (en) * | 2011-05-27 | 2016-11-01 | Sun Patent Trust | Decoding method and apparatus with candidate motion vectors |
| PL3629583T3 (en) * | 2011-05-31 | 2024-03-25 | Sun Patent Trust | Video decoding method, video decoding device |
| EP2725800A4 (en) * | 2011-06-27 | 2015-02-18 | Samsung Electronics Co Ltd | Method and apparatus for encoding motion information, and method and apparatus for decoding same |
-
2012
- 2012-09-27 JP JP2012214684A patent/JP5884697B2/en active Active
-
2015
- 2015-12-08 JP JP2015239667A patent/JP5884939B1/en active Active
- 2015-12-08 JP JP2015239664A patent/JP5884936B1/en active Active
- 2015-12-08 JP JP2015239666A patent/JP5884938B1/en active Active
- 2015-12-08 JP JP2015239665A patent/JP5884937B1/en active Active
-
2016
- 2016-02-08 JP JP2016021637A patent/JP6079912B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP6079912B2 (en) | 2017-02-15 |
| JP5884936B1 (en) | 2016-03-15 |
| JP5884939B1 (en) | 2016-03-15 |
| JP5884938B1 (en) | 2016-03-15 |
| JP2016096554A (en) | 2016-05-26 |
| JP2016059065A (en) | 2016-04-21 |
| JP2016059066A (en) | 2016-04-21 |
| JP2013085234A (en) | 2013-05-09 |
| JP2016096553A (en) | 2016-05-26 |
| JP2016106486A (en) | 2016-06-16 |
| JP5884937B1 (en) | 2016-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6079912B2 (en) | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program | |
| KR101711355B1 (en) | Video decoding device, video decoding method and recording medium storing video decoding program | |
| WO2013099244A1 (en) | Video encoding device, video encoding method, video encoding program, video decoding device, video decoding method, video decoding program | |
| JP5488666B2 (en) | Moving picture decoding apparatus, moving picture decoding method, moving picture decoding program, receiving apparatus, receiving method, and receiving program | |
| JP5747816B2 (en) | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program | |
| JP5962877B1 (en) | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program | |
| JP2013131918A (en) | Video decoder, video decoding method and video decoding program | |
| JP5617834B2 (en) | Moving picture decoding apparatus, moving picture decoding method, moving picture decoding program, receiving apparatus, receiving method, and receiving program | |
| WO2013046707A1 (en) | Video encoding device, video encoding method, video encoding program, transmitting device, transmitting method and transmitting program; and video decoding device, video decoding method, video decoding program, receiving device, receiving method and receiving program | |
| JP5962876B1 (en) | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program | |
| JP5962875B1 (en) | Moving picture coding apparatus, moving picture coding method, moving picture coding program, transmission apparatus, transmission method, and transmission program | |
| JP6037061B2 (en) | Moving picture decoding apparatus, moving picture decoding method, moving picture decoding program, receiving apparatus, receiving method, and receiving program | |
| JP2013131917A (en) | Video encoder, video encoding method and video encoding program | |
| JP2013110576A (en) | Moving image decoding device, moving image decoding method, and moving image decoding program | |
| JP2013110575A (en) | Moving image encoding device, moving image encoding method, and moving image encoding program | |
| JP2013192080A (en) | Moving image encoding device, moving image encoding method and moving image encoding program | |
| JP2013192081A (en) | Moving image decoding device, moving image decoding method and moving image decoding program | |
| JP2013132047A (en) | Video encoder, video encoding method, video encoding program, transmitter, transmission method, and transmission program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150331 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151208 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20151208 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20160104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160125 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Ref document number: 5884697 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |