JP5362330B2 - 充電台 - Google Patents
充電台 Download PDFInfo
- Publication number
- JP5362330B2 JP5362330B2 JP2008293933A JP2008293933A JP5362330B2 JP 5362330 B2 JP5362330 B2 JP 5362330B2 JP 2008293933 A JP2008293933 A JP 2008293933A JP 2008293933 A JP2008293933 A JP 2008293933A JP 5362330 B2 JP5362330 B2 JP 5362330B2
- Authority
- JP
- Japan
- Prior art keywords
- coil
- position detection
- induction coil
- power supply
- battery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
- H02J50/12—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling of the resonant type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/60—Circuit arrangements or systems for wireless supply or distribution of electric power responsive to the presence of foreign objects, e.g. detection of living beings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/80—Circuit arrangements or systems for wireless supply or distribution of electric power involving the exchange of data, concerning supply or distribution of electric power, between transmitting devices and receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
- H02J7/0045—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction concerning the insertion or the connection of the batteries
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Description
また、本発明の他の大切な目的は、ケース上面に電池内蔵機器と一緒に他の金属を載せてもこれに磁気誘導作用で電流が流れて発熱することがなく、安全に使用できると共に、電源コイルから誘導コイルに効率よく電力搬送できる充電台及び充電台と電池内蔵機器並びに充電台を用いた電池内蔵機器の充電方法を提供することにある。
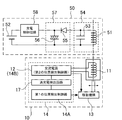
充電台は、電磁結合される誘導コイル51を内蔵して、この誘導コイル51に誘導される電力で充電される電池52を内蔵する電池内蔵機器50、90の充電台である。この充電台は、交流電源12、82に接続されて誘導コイル51に起電力を誘導する電源コイル11と、この電源コイル11を内蔵すると共に、上面には電池内蔵機器50、90を載せる上面プレート21を有するケース20と、このケース20に内蔵されて、電源コイル11を上面プレート21の内面に沿って移動させる移動機構13と、上面プレート21に載せられる電池内蔵機器50、90の位置を検出して移動機構13を制御して電源コイル11を電池内蔵機器50、90の誘導コイル51に接近させる位置検出制御器14、64とを備える。充電台は、ケース20の上面プレート21に電池内蔵機器50、90が載せられると、この電池内蔵機器50、90の位置を位置検出制御器14、64が検出し、位置検出制御器14、64が移動機構13を制御して、移動機構13でもって電源コイル11を上面プレート21に沿って移動させて電池内蔵機器50、90の誘導コイル51に接近させる。
る。
ル11と前記電池内蔵機器50、90とを隔てる上面プレート21と、前記上面プレート21を有すると共に、内部に前記誘導コイル51と、前記電池52と、前記移動機構13と、位置検出制御器14、64と、を内蔵するケース20と、を備えることができる。
本発明の第15の充電台は、前記位置検出制御器14が、電池内蔵機器50、90の誘導コイル51の位置を粗検出する第1の位置検出制御器14Aと、前記誘導コイル51の位置を精密検出する第2の位置検出制御器14B、14Cとを備え、第1の位置検出制御器14Aで誘導コイル51に接近された電源コイル11が、第2の位置検出制御器14B、14Cで誘導コイル51に接近されるように構成できる。
本発明の第16の充電台は、前記第1の位置検出制御器14Aが、上面プレート21に沿ってケース20内に設けられた複数の位置検出コイル30と、この位置検出コイル30にパルス信号を供給するパルス電源31と、このパルス電源31から位置検出コイル30に供給されるパルス信号に励起されて誘導コイル51から位置検出コイル30に出力されるエコー信号を受信する受信回路32と、この受信回路32が受信するエコー信号から誘導コイル51の位置を判別する識別回路33とを備えることができる。
回路に記憶されるエコー信号のレベルに比較して、誘導コイルの位置を検出するので、位置検出コイルに誘導されるエコー信号のレベルから、誘導コイルの位置を正確に検出することができる。この充電台は、誘導コイルの位置を位置検出制御器で正確に検出することにより、電源コイルを速やかに誘導コイルに接近させて、内蔵電池を効率よく充電できる。
(1)ケース20の上面プレート21に電池内蔵機器50が載せられると、この電池内蔵機器50の位置が位置検出制御器14で検出される。
(2)電池内蔵機器50の位置を検出した位置検出制御器14は、移動機構13を制御して、移動機構13でもって電源コイル11を上面プレート21に沿って移動させて電池内蔵機器50の誘導コイル51に接近させる。
(3)誘導コイル51に接近する電源コイル11は、誘導コイル51に電磁結合されて誘導コイル51に交流電力を搬送する。
(4)電池内蔵機器50は、誘導コイル51の交流電力を整流して直流に変換し、この直流で内蔵電池52を充電する。
なお、上記のような波形のエコー信号が検出されたとき、充電台の識別回路73は、電池内蔵機器50の誘導コイル51が搭載されたと認識、識別することができる。エコー信号の波形とは異なる波形が検出、識別されるときは、電池内蔵機器50の誘導コイル51以外(例えば、金属異物)のものが搭載されたとして、電力供給を停止することができる。また、エコー信号の波形が検出、識別されないときは、電池内蔵機器50の誘導コイル51が搭載されていないとして、電力供給をしない。
11…電源コイル
12…交流電源
13…移動機構
14…位置検出制御器 14A…第1の位置検出制御器
14B…第2の位置検出制御器
14C…第2の位置検出制御器
15…コア 15A…円柱部
15B…円筒部
16…リード線
17…満充電検出回路
20…ケース
21…上面プレート
22…サーボモータ 22A…X軸サーボモータ
22B…Y軸サーボモータ
23…ネジ棒 23A…X軸ネジ棒
23B…Y軸ネジ棒
24…ナット材 24A…X軸ナット材
24B…Y軸ナット材
25…ベルト
26…ガイドロッド
27…ガイド部
30…位置検出コイル 30A…X軸検出コイル
30B…Y軸検出コイル
31…パルス電源
32…受信回路
33…識別回路
34…切換回路
35…リミッター回路
36…A/Dコンバータ
50…電池内蔵機器
51…誘導コイル
52…電池
53…コンデンサー
54…共振回路
55…ダイオード
56…平滑コンデンサー
57…整流回路
58…充電制御回路
64…位置検出制御器
73…識別回路
77…記憶回路
80…充電台
82…交流電源
83…電圧検出回路
84…消費電力検出回路
85…受信回路
90…電池内蔵機器
95…送信回路
Claims (11)
- 電磁結合される誘導コイル(51)を内蔵して、この誘導コイル(51)に誘導される電力で充電される電池(52)を内蔵する電池内蔵機器(50)、(90)の充電台であって、
交流電源(12)、(82)に接続されて誘導コイル(51)に起電力を誘導する電源コイル(11)と、この電源コイル(11)を内蔵すると共に、上面には電池内蔵機器(50)、(90)を載せる上面プレート(21)を有するケース(20)と、このケース(20)に内蔵されて、前記電源コイル(11)を上面プレート(21)の内面に沿って移動させる移動機構(13)と、上面プレート(21)に載せられる電池内蔵機器(50)、(90)の位置を検出して移動機構(13)を制御して電源コイル(11)を電池内蔵機器(50)、(90)の誘導コイル(51)に接近させる位置検出制御器(14)、(64)とを備え、
前記ケース(20)の上面プレート(21)に電池内蔵機器(50)、(90)が載せられると、この電池内蔵機器(50)、(90)の位置が位置検出制御器(14)、(64)に検出され、位置検出制御器(14)、(64)が移動機構(13)を制御して、移動機構(13)でもって電源コイル(11)を上面プレート(21)に沿って移動させて電池内蔵機器(50)、(90)の誘導コイル(51)に接近させるようにしてなり、
前記位置検出制御器(14)が、上面プレート(21)に沿ってケース(20)内に配置された複数の位置検出コイル(30)と、この位置検出コイル(30)にパルス信号を供給するパルス電源(31)と、このパルス電源(31)から位置検出コイル(30)に供給されるパルス信号に励起されて誘導コイル(51)から位置検出コイル(30)に出力されるエコー信号を受信する受信回路(32)と、この受信回路(32)が受信するエコー信号から誘導コイル(51)の位置を判別する識別回路(33)とを備える充電台。 - 電磁結合される誘導コイル(51)を内蔵して、この誘導コイル(51)に誘導される電力で充電される電池(52)を内蔵する電池内蔵機器(50)、(90)の充電台であって、
交流電源(12)、(82)に接続されて誘導コイル(51)に起電力を誘導する電源コイル(11)と、この電源コイル(11)を内蔵すると共に、上面には電池内蔵機器(50)、(90)を載せる上面プレート(21)を有するケース(20)と、このケース(20)に内蔵されて、前記電源コイル(11)を上面プレート(21)の内面に沿って移動させる移動機構(13)と、上面プレート(21)に載せられる電池内蔵機器(50)、(90)の位置を検出して移動機構(13)を制御して電源コイル(11)を電池内蔵機器(50)、(90)の誘導コイル(51)に接近させる位置検出制御器(14)、(64)とを
備え、
前記ケース(20)の上面プレート(21)に電池内蔵機器(50)、(90)が載せられると、この電池内蔵機器(50)、(90)の位置が位置検出制御器(14)、(64)に検出され、位置検出制御器(14)、(64)が移動機構(13)を制御して、移動機構(13)でもって電源コイル(11)を上面プレート(21)に沿って移動させて電池内蔵機器(50)、(90)の誘導コイル(51)に接近させるようにしてなり、
前記ケース(20)の上面プレート(21)が複数の電池内蔵機器(50)を載せることができる大きさで、位置検出制御器(14)が内蔵電池(52)の満充電を検出する満充電検出回路(17)を内蔵しており、この満充電検出回路(17)が充電している電池内蔵機器(50)の電池(52)の満充電を検出すると、満充電されない電池(52)を内蔵する未充電の電池内蔵機器(50)の位置を検出して、電源コイル(11)を未充電の電池内蔵機器(50)の誘導コイル(51)に接近するように移動機構(13)を制御して、未充電の電池内蔵機器(50)の電池(52)を充電するようにしてなる充電台。 - 前記位置検出制御器(14)が前記誘導コイル(51)の位置を検出して電源コイル(11)を誘導コイル(51)に接近させる請求項1又は2に記載される充電台。
- 前記位置検出制御器(14)が、電源コイル(11)を上面プレート(21)に沿ってX軸方向又はY軸方向に移動して誘導コイル(51)に接近させる請求項1から3のいずれか一に記載される充電台。
- 前記交流電源(12)が自励式の発振回路を有し、前記位置検出制御器(14)が、自励式の発振回路の発振周波数から誘導コイル(51)の位置を検出して移動機構(13)を制御する請求項1から4のいずれか一に記載される充電台。
- 前記位置検出制御器(14)が、電池内蔵機器(50)、(90)の誘導コイル(51)の位置を粗検出する第1の位置検出制御器(14A)と、前記誘導コイル(51)の位置を精密検出する第2の位置検出制御器(14B)、(14C)とを備え、第1の位置検出制御器(14A)で誘導コイル(51)に接近された電源コイル(11)が、第2の位置検出制御器(14B)、(14C)で誘導コイル(51)に接近されるようにしてなる請求項1から5のいずれか一に記載される充電台。
- 前記第1の位置検出制御器(14A)が、上面プレート(21)に沿ってケース(20)内に設けられた複数の位置検出コイル(30)と、この位置検出コイル(30)にパルス信号を供給するパルス電源(31)と、このパルス電源(31)から位置検出コイル(30)に供給されるパルス信号に励起されて誘導コイル(51)から位置検出コイル(30)に出力されるエコー信号を受信する受信回路(32)と、この受信回路(32)が受信するエコー信号から誘導コイル(51)の位置を判別する識別回路(33)とを備える請求項6に記載される充電台。
- 前記交流電源(12)が自励式の発振回路を有し、前記第2の位置検出制御器(14B)が、自励式の発振回路の発振周波数から誘導コイル(51)の位置を検出して移動機構(13)を制御する請求項6に記載される充電台。
- 前記位置検出制御器(64)が、上面プレート(21)に沿ってケース(20)内に設けられた複数の位置検出コイル(30)と、この位置検出コイル(30)にパルス信号を供給するパルス電源(31)と、このパルス電源(31)から位置検出コイル(30)に供給されるパルス信号に励起されて誘導コイル(51)から位置検出コイル(30)に出力されるエコー信号を受信する受信回路(32)と、この受信回路(32)が受信するエコー信号から誘導コイル(51)の位置を判別する識別回路(73)とを備え、
前記識別回路(73)が、誘導コイル(51)の位置に対する各々の位置検出コイル(30)に誘導されるエコー信号のレベルを記憶する記憶回路(77)を備えており、各々の位置検出コイル
(30)に誘導されるエコー信号のレベルを、識別回路(73)に記憶されるエコー信号のレベルに比較して、誘導コイル(51)の位置を検出する請求項1から8のいずれか一に記載される充電台。 - 電磁結合される誘導コイル(51)と、
前記誘導コイル(51)に誘導される電力で充電される電池(52)と、
を備える電池内蔵機器(50)、(90)を充電するための充電台であって、
交流電源(12)、(82)に接続されて、前記誘導コイル(51)に起電力を誘導する電源コイル(11)と、
前記電源コイル(11)を上面プレート(21)の内面に沿って移動させる移動機構(13)と、
前記上面プレート(21)に接近された前記電池内蔵機器(50)、(90)の位置を検出して、前記移動機構(13)を制御して前記電源コイル(11)を、前記電池内蔵機器(50)、(90)の誘導コイル(51)に接近させる位置検出制御器(14)、(64)と、
前記電源コイル(11)と前記電池内蔵機器(50)、(90)とを隔てる上面プレート(21)と、
前記上面プレート(21)を有すると共に、内部に前記誘導コイル(51)と、前記電池(52)と、前記移動機構(13)と、位置検出制御器(14)、(64)と、を内蔵するケース(20)と、
を備え、
第1の位置検出制御器(14A)が、上面プレート(21)に沿ってケース(20)内に設けられた複数の位置検出コイル(30)と、この位置検出コイル(30)にパルス信号を供給するパルス電源(31)と、このパルス電源(31)から位置検出コイル(30)に供給されるパルス信号に励起されて誘導コイル(51)から位置検出コイル(30)に出力されるエコー信号を受信する受信回路(32)と、この受信回路(32)が受信するエコー信号から誘導コイル(51)の位置を判別する識別回路(33)とを備えることを特徴とする電池内蔵機器(50)、(90)の充電台。 - 前記位置検出制御器(14)が、電池内蔵機器(50)、(90)の誘導コイル(51)の位置を粗検出する前記第1の位置検出制御器(14A)と、前記誘導コイル(51)の位置を精密検出する第2の位置検出制御器(14B)、(14C)とを備え、前記第1の位置検出制御器(14A)で誘導コイル(51)に接近された電源コイル(11)が、前記第2の位置検出制御器(14B)、(14C)で誘導コイル(51)に接近されるようにしてなる請求項10に記載される充電台。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008293933A JP5362330B2 (ja) | 2007-12-18 | 2008-11-17 | 充電台 |
| US12/314,743 US8305036B2 (en) | 2007-12-18 | 2008-12-16 | Battery charger cradle |
| US13/617,134 US8664914B2 (en) | 2007-12-18 | 2012-09-14 | Battery charger cradle |
| US14/041,289 US8786252B2 (en) | 2007-12-18 | 2013-09-30 | Battery charger cradle |
| US14/297,920 US9124106B2 (en) | 2007-12-18 | 2014-06-06 | Battery charger cradle |
| US14/807,246 US9312711B2 (en) | 2007-12-18 | 2015-07-23 | Battery charger cradle |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007325662 | 2007-12-18 | ||
| JP2007325662 | 2007-12-18 | ||
| JP2008064860 | 2008-03-13 | ||
| JP2008064860 | 2008-03-13 | ||
| JP2008293933A JP5362330B2 (ja) | 2007-12-18 | 2008-11-17 | 充電台 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013172305A Division JP5662532B2 (ja) | 2007-12-18 | 2013-08-22 | 充電台 |
| JP2013172302A Division JP5430046B2 (ja) | 2007-12-18 | 2013-08-22 | 充電台 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009247194A JP2009247194A (ja) | 2009-10-22 |
| JP2009247194A5 JP2009247194A5 (ja) | 2012-11-08 |
| JP5362330B2 true JP5362330B2 (ja) | 2013-12-11 |
Family
ID=40752311
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008293933A Expired - Fee Related JP5362330B2 (ja) | 2007-12-18 | 2008-11-17 | 充電台 |
Country Status (2)
| Country | Link |
|---|---|
| US (5) | US8305036B2 (ja) |
| JP (1) | JP5362330B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014079167A (ja) * | 2007-12-18 | 2014-05-01 | Panasonic Corp | 充電台 |
Families Citing this family (158)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130198867A1 (en) * | 2011-12-09 | 2013-08-01 | Z124 | A Docking Station for Portable Devices Providing Authorized Power Transfer and Facility Access |
| US7656628B2 (en) * | 2006-08-04 | 2010-02-02 | International Business Machines Corporation | Apparatus for providing fault protection in a circuit supplying power to an electronic device |
| MX2009008011A (es) | 2007-01-29 | 2010-02-18 | Powermat Ltd | Acoplamiento de energia sin clavija y metodo para controlar la transferenca de la energia atraves de un acoplamiento inductivo. |
| PT2154763T (pt) | 2007-03-22 | 2021-11-02 | Powermat Tech Ltd | Monitor de eficiência para transmissão de potência indutiva |
| KR20100051753A (ko) | 2007-09-25 | 2010-05-17 | 파우워매트 엘티디. | 유도전력전송 플랫폼 |
| US10068701B2 (en) | 2007-09-25 | 2018-09-04 | Powermat Technologies Ltd. | Adjustable inductive power transmission platform |
| US8283812B2 (en) | 2007-10-09 | 2012-10-09 | Powermat Technologies, Ltd. | Inductive power providing system having moving outlets |
| US8193769B2 (en) | 2007-10-18 | 2012-06-05 | Powermat Technologies, Ltd | Inductively chargeable audio devices |
| US8536737B2 (en) | 2007-11-19 | 2013-09-17 | Powermat Technologies, Ltd. | System for inductive power provision in wet environments |
| JP5362330B2 (ja) | 2007-12-18 | 2013-12-11 | 三洋電機株式会社 | 充電台 |
| US20090212639A1 (en) * | 2008-02-25 | 2009-08-27 | L & P Property Management Company | Inductively coupled consoles |
| US8228026B2 (en) * | 2008-02-25 | 2012-07-24 | L & P Property Management Company | Inductively coupled shelving and storage containers |
| AU2008353278A1 (en) | 2008-03-17 | 2009-09-24 | Powermat Technologies Ltd. | Inductive transmission system |
| US9960640B2 (en) | 2008-03-17 | 2018-05-01 | Powermat Technologies Ltd. | System and method for regulating inductive power transmission |
| US9960642B2 (en) | 2008-03-17 | 2018-05-01 | Powermat Technologies Ltd. | Embedded interface for wireless power transfer to electrical devices |
| US9337902B2 (en) | 2008-03-17 | 2016-05-10 | Powermat Technologies Ltd. | System and method for providing wireless power transfer functionality to an electrical device |
| US9331750B2 (en) | 2008-03-17 | 2016-05-03 | Powermat Technologies Ltd. | Wireless power receiver and host control interface thereof |
| US8320143B2 (en) | 2008-04-15 | 2012-11-27 | Powermat Technologies, Ltd. | Bridge synchronous rectifier |
| AU2009254785A1 (en) | 2008-06-02 | 2009-12-10 | Powermat Technologies Ltd. | Appliance mounted power outlets |
| US8981598B2 (en) | 2008-07-02 | 2015-03-17 | Powermat Technologies Ltd. | Energy efficient inductive power transmission system and method |
| US11979201B2 (en) | 2008-07-02 | 2024-05-07 | Powermat Technologies Ltd. | System and method for coded communication signals regulating inductive power transmissions |
| US8188619B2 (en) | 2008-07-02 | 2012-05-29 | Powermat Technologies Ltd | Non resonant inductive power transmission system and method |
| JP2012507737A (ja) | 2008-07-08 | 2012-03-29 | パワーマット テクノロジーズ リミテッド | ディスプレイデバイス |
| AU2009297963A1 (en) | 2008-09-23 | 2010-04-01 | Powermat Technologies Ltd. | Combined antenna and inductive power receiver |
| JP5258521B2 (ja) * | 2008-11-14 | 2013-08-07 | トヨタ自動車株式会社 | 給電システム |
| NZ593750A (en) * | 2009-01-06 | 2013-09-27 | Access Business Group Int Llc | Inductive power supply |
| JP5262785B2 (ja) * | 2009-02-09 | 2013-08-14 | 株式会社豊田自動織機 | 非接触電力伝送装置 |
| US9407327B2 (en) * | 2009-02-13 | 2016-08-02 | Qualcomm Incorporated | Wireless power for chargeable and charging devices |
| KR101341258B1 (ko) * | 2009-03-17 | 2013-12-13 | 후지쯔 가부시끼가이샤 | 무선 전력 공급 시스템 |
| CN101860085A (zh) * | 2009-04-08 | 2010-10-13 | 鸿富锦精密工业(深圳)有限公司 | 无线供电器 |
| CN101860046A (zh) * | 2009-04-09 | 2010-10-13 | 鸿富锦精密工业(深圳)有限公司 | 无线充电装置 |
| US8310200B2 (en) * | 2009-04-15 | 2012-11-13 | GM Global Technology Operations LLC | Inductive chargers and inductive charging systems for portable electronic devices |
| JP5340017B2 (ja) * | 2009-04-28 | 2013-11-13 | 三洋電機株式会社 | 電池内蔵機器と充電台 |
| JP5597022B2 (ja) * | 2009-05-13 | 2014-10-01 | キヤノン株式会社 | 給電装置、及び制御方法 |
| JP2010288431A (ja) * | 2009-06-15 | 2010-12-24 | Sanyo Electric Co Ltd | 電池内蔵機器と充電台 |
| JP5362453B2 (ja) | 2009-06-16 | 2013-12-11 | 三洋電機株式会社 | 充電台 |
| WO2010150482A1 (ja) * | 2009-06-25 | 2010-12-29 | タナシン電機株式会社 | 2次元移動機構 |
| USD611898S1 (en) | 2009-07-17 | 2010-03-16 | Lin Wei Yang | Induction charger |
| USD611900S1 (en) | 2009-07-31 | 2010-03-16 | Lin Wei Yang | Induction charger |
| USD611899S1 (en) | 2009-07-31 | 2010-03-16 | Lin Wei Yang | Induction charger |
| KR101711912B1 (ko) * | 2009-09-16 | 2017-03-06 | 삼성전자주식회사 | 이동단말기의 효율적인 무선 충전을 위한 장치 및 방법 |
| US8482160B2 (en) * | 2009-09-16 | 2013-07-09 | L & P Property Management Company | Inductively coupled power module and circuit |
| JP5357970B2 (ja) * | 2009-09-18 | 2013-12-04 | シャープ株式会社 | 電池および無線通信機器 |
| KR20110034773A (ko) * | 2009-09-29 | 2011-04-06 | 삼성전자주식회사 | 유도성 결합 방식을 이용한 무선 충전기 |
| US8355297B2 (en) | 2009-11-05 | 2013-01-15 | Devon Works, LLC | Watch assembly having a plurality of time-coordinated belts |
| KR20110050831A (ko) * | 2009-11-09 | 2011-05-17 | 삼성전자주식회사 | 배터리 충전 시스템에서 무접점 충전을 지원하기 위한 장치 및 방법 |
| KR101393758B1 (ko) | 2009-11-17 | 2014-05-12 | 애플 인크. | 로컬 컴퓨팅 환경에서의 무선 전력 이용 |
| KR101688893B1 (ko) * | 2009-12-14 | 2016-12-23 | 삼성전자주식회사 | 무선 전력 전송 장치 |
| CN102892623A (zh) * | 2009-12-28 | 2013-01-23 | 丰田合成有限公司 | 用于便携式电子设备的可充电或连接盘 |
| JP2011205749A (ja) * | 2010-03-24 | 2011-10-13 | Toshiba Corp | 判定装置 |
| DE102010020125B4 (de) * | 2010-05-10 | 2021-07-15 | Sew-Eurodrive Gmbh & Co Kg | Anordnung zur berührungslosen Energieübertragung |
| JP5538124B2 (ja) * | 2010-08-03 | 2014-07-02 | 三洋電機株式会社 | 電池内蔵機器の無接点充電方法 |
| JP2012065484A (ja) * | 2010-09-17 | 2012-03-29 | Tamura Seisakusho Co Ltd | 非接触電力伝送装置 |
| CN103249592B (zh) * | 2010-10-29 | 2016-06-15 | 高通股份有限公司 | 用于对电动车辆进行供电或充电的方法和设备 |
| JP2012130139A (ja) * | 2010-12-14 | 2012-07-05 | Tanashin Denki Co | 磁気誘導式コイル移動型無接点充電器 |
| FR2971898A1 (fr) * | 2011-02-22 | 2012-08-24 | Peugeot Citroen Automobiles Sa | Dispositif emetteur a bobine libre dans un systeme de recharge sans fil |
| WO2012132142A1 (ja) * | 2011-03-30 | 2012-10-04 | 三洋電機株式会社 | 携帯電話の充電台 |
| JPWO2012132143A1 (ja) * | 2011-03-30 | 2014-07-24 | 三洋電機株式会社 | 充電台 |
| JP2014116988A (ja) * | 2011-03-30 | 2014-06-26 | Sanyo Electric Co Ltd | 充電台 |
| DE102011110680B4 (de) | 2011-06-08 | 2023-11-23 | Peiker Acustic Gmbh & Co. Kg | Ladeanordnung für ein Fahrzeug |
| JP5666997B2 (ja) * | 2011-06-21 | 2015-02-12 | タナシン電機株式会社 | コイル移動型無接点充電器 |
| US8751038B2 (en) * | 2011-08-01 | 2014-06-10 | Elwha Llc | Vending devices having ad-watching as consideration |
| WO2013031054A1 (ja) * | 2011-08-31 | 2013-03-07 | Necカシオモバイルコミュニケーションズ株式会社 | 充電システム、電子機器、充電制御方法及びプログラム |
| EP2752963A4 (en) * | 2011-09-02 | 2015-07-15 | Panasonic Ip Man Co Ltd | LOAD DEVICE MOUNTED ON A VEHICLE |
| JP2013055803A (ja) * | 2011-09-05 | 2013-03-21 | Denso Corp | 非接触式充電装置 |
| CN102694408B (zh) * | 2011-09-27 | 2014-06-25 | 华为技术有限公司 | 无线充电强度指示方法及被充电设备 |
| JP5110196B1 (ja) | 2011-10-13 | 2012-12-26 | パナソニック株式会社 | 車載用電子装置 |
| CN103891099B (zh) * | 2011-10-27 | 2017-05-31 | 丰田自动车株式会社 | 非接触受电装置、非接触输电装置和非接触输电受电系统 |
| JP6002931B2 (ja) | 2011-12-07 | 2016-10-05 | パナソニックIpマネジメント株式会社 | 車載用充電器 |
| CN102545326A (zh) * | 2011-12-30 | 2012-07-04 | 中兴通讯股份有限公司 | 无线充电装置及系统、移动终端 |
| JP2013192391A (ja) * | 2012-03-14 | 2013-09-26 | Sony Corp | 検知装置、受電装置、送電装置及び非接触給電システム |
| JP5749208B2 (ja) | 2012-03-26 | 2015-07-15 | 株式会社東芝 | 送電装置、受電装置、制御装置および無線電力伝送システム |
| US9431989B2 (en) | 2012-03-30 | 2016-08-30 | Panasonic Intellectual Property Management Co., Ltd. | Power transmitting device, electronic equipment and wireless power transmission system |
| FR2989529B1 (fr) * | 2012-04-12 | 2016-04-15 | Continental Automotive France | Procede et banc de charge par couplage magnetique |
| JP5229414B1 (ja) * | 2012-05-17 | 2013-07-03 | パナソニック株式会社 | 携帯端末充電装置と、それを用いた自動車 |
| JP2013243792A (ja) * | 2012-05-17 | 2013-12-05 | Sharp Corp | 充電装置 |
| DE102012211151B4 (de) * | 2012-06-28 | 2021-01-28 | Siemens Aktiengesellschaft | Ladeanordnung und Verfahren zum induktiven Laden eines elektrischen Energiespeichers |
| WO2014006627A1 (en) * | 2012-07-05 | 2014-01-09 | Powermat Technologies Ltd. | System and method for providing inductive power at multiple power levels |
| JP6277492B2 (ja) | 2012-07-27 | 2018-02-14 | パナソニックIpマネジメント株式会社 | 充電システム |
| JP6226302B2 (ja) | 2012-08-08 | 2017-11-08 | パナソニックIpマネジメント株式会社 | 無接点充電装置と、そのプログラム、およびそれを用いた自動車 |
| US20150236517A1 (en) | 2012-09-18 | 2015-08-20 | Panasonic Intellectual Property Management Co., Ltd. | Contactless electric power feeding system |
| CN202918004U (zh) * | 2012-10-15 | 2013-05-01 | 东莞富强电子有限公司 | 无线充电器 |
| TW201416261A (zh) * | 2012-10-19 | 2014-05-01 | Primax Electronics Ltd | 無線充電傳輸裝置 |
| JP6162941B2 (ja) * | 2012-10-30 | 2017-07-12 | 富士通テン株式会社 | 保持装置、及び、保持方法 |
| WO2014110091A1 (en) * | 2013-01-11 | 2014-07-17 | Vishay Dale Electronics, Inc. | Wireless side charging |
| JP2014166130A (ja) * | 2013-02-28 | 2014-09-08 | Panasonic Corp | 携帯端末充電装置と、それを用いた自動車 |
| US9106085B2 (en) * | 2013-03-04 | 2015-08-11 | Uc-Logic Technology Corp. | Combined transformer, and non-contact battery charging device using the same |
| WO2014156656A1 (ja) * | 2013-03-29 | 2014-10-02 | 日産自動車株式会社 | 電気自動車及び電気自動車の駐車支援システム |
| TWM459603U (zh) * | 2013-04-22 | 2013-08-11 | Formosa Electronic Ind Inc | 推移式無線充電發射器位置調節結構 |
| JP6178976B2 (ja) | 2013-05-31 | 2017-08-16 | パナソニックIpマネジメント株式会社 | 携帯端末充電装置と、それを用いた自動車 |
| JP6340559B2 (ja) | 2013-06-13 | 2018-06-13 | パナソニックIpマネジメント株式会社 | 携帯端末充電装置と、それを用いた自動車 |
| JP6191949B2 (ja) * | 2013-06-18 | 2017-09-06 | パナソニックIpマネジメント株式会社 | 無接点充電装置、プログラム、および、無接点充電装置を搭載した車両 |
| EP3032687B1 (en) * | 2013-07-18 | 2017-11-29 | Panasonic Intellectual Property Management Co., Ltd. | Contactless charger, program therefor, and automobile equipped with same |
| JP2015027187A (ja) * | 2013-07-26 | 2015-02-05 | Necプラットフォームズ株式会社 | 非接触充電システムおよびこれに用いる充電器と電子機器 |
| EP3032699B1 (en) | 2013-07-31 | 2018-10-10 | Panasonic Corporation | Wireless electricity transmission device and wireless power transmission system |
| WO2015025478A1 (ja) | 2013-08-21 | 2015-02-26 | パナソニックIpマネジメント株式会社 | 携帯端末充電装置と、それを搭載した自動車 |
| US9425640B2 (en) * | 2013-09-26 | 2016-08-23 | The Charles Stark Draper Laboratory, Inc. | System and method of inductive charging and localization through using multiple primary inductive coils to detect the induced voltage of a secondary inductive coil |
| WO2015059912A1 (ja) | 2013-10-21 | 2015-04-30 | パナソニックIpマネジメント株式会社 | 携帯端末充電装置と、それを用いた自動車 |
| EP3065262B1 (en) * | 2013-11-01 | 2018-04-04 | Panasonic Intellectual Property Management Co., Ltd. | Mobile-terminal charging device, and vehicle provided with same |
| US10090718B2 (en) | 2013-12-16 | 2018-10-02 | Panasonic Intellectual Property Management Co., Ltd. | Contactless charging device, program therefor, and automobile having contactless charging device mounted therein |
| EP3121924B1 (en) | 2013-12-25 | 2019-04-03 | Panasonic Intellectual Property Management Co., Ltd. | Portable terminal charging apparatus and automobile having portable terminal charging apparatus mounted therein |
| US9908423B2 (en) * | 2014-02-25 | 2018-03-06 | Ford Global Technologies, Llc | Vehicle charging system |
| JP6340602B2 (ja) * | 2014-03-24 | 2018-06-13 | パナソニックIpマネジメント株式会社 | 携帯端末充電装置と、それを搭載した自動車 |
| US9577461B2 (en) | 2014-04-16 | 2017-02-21 | International Business Machines Corporation | Multi axis vibration unit in device for vectored motion |
| US9853507B2 (en) * | 2014-05-05 | 2017-12-26 | Apple Inc. | Self-locating inductive coil |
| JP6455808B2 (ja) | 2014-05-19 | 2019-01-23 | Tdk株式会社 | 給電装置 |
| CN106415977B (zh) | 2014-05-19 | 2019-06-14 | 松下知识产权经营株式会社 | 移动终端充电装置及搭载其的汽车 |
| JP2016027782A (ja) * | 2014-06-30 | 2016-02-18 | シナノケンシ株式会社 | 無線給電装置および無線給電システム |
| CN104184854A (zh) * | 2014-07-29 | 2014-12-03 | 安徽郁金香新能源科技有限公司 | 一种新型手机 |
| US9522604B2 (en) * | 2014-08-04 | 2016-12-20 | Ford Global Technologies, Llc | Inductive wireless power transfer system having a coupler assembly comprising moveable permeable panels |
| JP6566614B2 (ja) * | 2014-08-08 | 2019-08-28 | キヤノン株式会社 | 充電装置及びその制御方法 |
| TWI544713B (zh) * | 2014-09-05 | 2016-08-01 | 緯創資通股份有限公司 | 無線充電裝置與方法 |
| US20170201116A1 (en) * | 2014-09-28 | 2017-07-13 | Intel Corporation | Wireless charger coupling for electronic devices |
| WO2016085540A1 (en) | 2014-11-26 | 2016-06-02 | Techtronic Industries Co. Ltd. | Battery park |
| JP6331146B2 (ja) | 2014-12-05 | 2018-05-30 | 本田技研工業株式会社 | エアバッグ装置 |
| JP6013437B2 (ja) | 2014-12-05 | 2016-10-25 | 本田技研工業株式会社 | 非接触充電器 |
| DE102014226237A1 (de) * | 2014-12-17 | 2016-06-23 | Robert Bosch Gmbh | Haltevorrichtung |
| US10132650B2 (en) * | 2015-01-22 | 2018-11-20 | Integrated Device Technology, Inc. | Apparatuses and related methods for detecting magnetic flux field characteristics with a wireless power transmitter |
| CN105006893A (zh) * | 2015-05-25 | 2015-10-28 | 福建联迪商用设备有限公司 | 一种无线密码键盘的充电系统及充电底座 |
| US10005368B2 (en) * | 2015-05-28 | 2018-06-26 | Jabil Inc. | System, apparatus and method for optimizing wireless charging alignment |
| WO2017002837A1 (ja) * | 2015-06-30 | 2017-01-05 | 株式会社村田製作所 | 結合補助デバイスおよびrfid通信システム |
| ES2793950T3 (es) * | 2015-07-01 | 2020-11-17 | Ericsson Telefon Ab L M | Desplazamiento de inhibición de un dispositivo recargable inalámbricamente |
| JP6579434B2 (ja) * | 2015-08-21 | 2019-09-25 | シンフォニアテクノロジー株式会社 | 非接触給電装置、および非接触給電装置を備えた処理装置 |
| CN105244971A (zh) * | 2015-11-10 | 2016-01-13 | 蔡淑彬 | 一种电动汽车自动充电系统 |
| US11689856B2 (en) | 2015-11-19 | 2023-06-27 | The Lovesac Company | Electronic furniture systems with integrated induction charger |
| JP6663725B2 (ja) | 2016-01-19 | 2020-03-13 | 東芝テック株式会社 | 非接触電力送電装置及び電力送受電装置 |
| JP6311736B2 (ja) * | 2016-03-22 | 2018-04-18 | Tdk株式会社 | 給電装置およびワイヤレス電力伝送装置 |
| KR101635084B1 (ko) * | 2016-03-31 | 2016-06-30 | 주식회사 핀크래프트엔지니어링 | 전압 및 전류 제어를 통한 멀티 충전이 가능한 충전 장치 |
| FR3059485B1 (fr) * | 2016-11-29 | 2019-12-27 | Continental Automotive France | Dispositif de charge par induction d'un equipement d'utilisateur pour vehicule automobile |
| JP6909026B2 (ja) | 2017-03-23 | 2021-07-28 | 東芝テック株式会社 | 非接触電力伝送装置および送電装置 |
| US10283952B2 (en) | 2017-06-22 | 2019-05-07 | Bretford Manufacturing, Inc. | Rapidly deployable floor power system |
| CN109149794B (zh) * | 2017-06-28 | 2020-11-17 | 金宝电子工业股份有限公司 | 无线充电系统与无线充电方法 |
| US11545855B2 (en) * | 2017-10-09 | 2023-01-03 | Voice Life Inc. | Receiver device for facilitating transaction of energy wirelessly received by the receiver device |
| US11735960B2 (en) * | 2017-10-09 | 2023-08-22 | Voice Life FZCO | Systems, methods, apparatuses, and devices for facilitating wireless energy transmissions |
| JP7110223B2 (ja) * | 2017-11-02 | 2022-08-01 | 株式会社半導体エネルギー研究所 | 給電装置およびその動作方法 |
| CN111512517B (zh) * | 2017-11-13 | 2023-06-23 | Tdk电子股份有限公司 | 动态发射线圈定位系统、无线功率传输系统以及定位发射线圈的方法 |
| KR102486155B1 (ko) * | 2017-12-14 | 2023-01-10 | 현대자동차주식회사 | 무선 충전 장치, 그를 가지는 차량 및 그 제어 방법 |
| KR20190092203A (ko) | 2018-01-29 | 2019-08-07 | 경문건 | 하드웨어 및 비용 효율이 높은 자율 무선충전 장치 |
| US11894697B2 (en) | 2017-12-15 | 2024-02-06 | Woncomm Co., Ltd. | Autonomous wireless charging system and method based on power loss tracking |
| CN108110830A (zh) * | 2017-12-25 | 2018-06-01 | 芜湖锐进医疗设备有限公司 | 医疗器械电池充电存放盒 |
| US10523040B2 (en) * | 2018-01-19 | 2019-12-31 | Motorola Solutions, Inc. | Method and apparatus for charging multiple electrical devices |
| US11005309B2 (en) * | 2018-01-26 | 2021-05-11 | Wbtec, Llc | Charging apparatus with locator |
| JP6512327B2 (ja) * | 2018-03-15 | 2019-05-15 | 船井電機株式会社 | 非接触給電装置 |
| US11101670B2 (en) * | 2018-09-07 | 2021-08-24 | Sector 5, Inc. | Wireless charging cart |
| CN109217439A (zh) * | 2018-11-16 | 2019-01-15 | 京东方科技集团股份有限公司 | 无线充电装置及充电系统 |
| US11152823B2 (en) * | 2019-04-01 | 2021-10-19 | Spark Connected LLC | Translation unit for wireless power transfer |
| US20220255372A1 (en) * | 2019-06-07 | 2022-08-11 | Jonathan Nord | Docking station with spatially-adjusted wireless energy transfer and digital offloading |
| CN110299740A (zh) * | 2019-06-27 | 2019-10-01 | 维沃移动通信有限公司 | 无线充电器及其控制方法 |
| CN112421787B (zh) | 2019-08-21 | 2023-12-19 | 北京小米移动软件有限公司 | 无线充电装置、系统、控制方法、充电设备及存储介质 |
| US11691529B2 (en) * | 2019-09-23 | 2023-07-04 | Abb Schweiz Ag | Systems and methods for automated electrical connector positioning for electric vehicle charging |
| CN110601313A (zh) * | 2019-10-16 | 2019-12-20 | 苏州蓝沛无线通信科技有限公司 | 一种线圈可移动的无线充电器 |
| TWI739257B (zh) * | 2019-12-30 | 2021-09-11 | 大陸商東莞寶德電子有限公司 | 充電位置可調的充電板及其充電控制方法 |
| CN111082499A (zh) * | 2020-01-17 | 2020-04-28 | 深圳市一讯达科技有限公司 | 一种无线充电装置及无线充电控制方法 |
| CN113937896A (zh) * | 2020-06-29 | 2022-01-14 | Oppo广东移动通信有限公司 | 无线充电模块及无线充电装置 |
| US10892653B1 (en) | 2020-07-29 | 2021-01-12 | Eric Rolfe | System and method for simultaneous inductive recharging of multiple electronic devices |
| CN112260411B (zh) * | 2020-09-09 | 2022-09-16 | 华为数字能源技术有限公司 | 一种无线充电设备、对位方法、系统及充电底座 |
| CN113162247A (zh) * | 2021-01-21 | 2021-07-23 | 华为技术有限公司 | 一种无线充电设备、自动对位方法及充电底座 |
| CN219312535U (zh) * | 2022-03-02 | 2023-07-07 | 时代电服科技有限公司 | 充电装置及换电站 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4941154A (en) | 1989-05-30 | 1990-07-10 | At&T Bell Laboratories | Trellis coding method and arrangement for fractional bit rates |
| JP3011829B2 (ja) | 1993-06-30 | 2000-02-21 | 株式会社ケンウッド | スピーカの製造方法及び製造装置 |
| US5498948A (en) * | 1994-10-14 | 1996-03-12 | Delco Electornics | Self-aligning inductive charger |
| JP3907723B2 (ja) | 1995-08-30 | 2007-04-18 | 東芝電池株式会社 | 電池パック |
| JP3586955B2 (ja) * | 1996-02-02 | 2004-11-10 | 住友電装株式会社 | 電気自動車用充電システム |
| EP0788212B1 (en) * | 1996-01-30 | 2002-04-17 | Sumitomo Wiring Systems, Ltd. | Connection system and connection method for an electric automotive vehicle |
| US6316909B1 (en) | 1998-03-24 | 2001-11-13 | Seiko Epson Corporation | Electronic device, control method for electronic device, recharge-rate estimating method for secondary battery, and charging control method for secondary battery |
| JP4240748B2 (ja) | 2000-04-25 | 2009-03-18 | パナソニック電工株式会社 | 無接点給電装置 |
| JP2003189508A (ja) | 2001-12-14 | 2003-07-04 | Furukawa Electric Co Ltd:The | 非接触電力供給装置 |
| KR100459478B1 (ko) * | 2002-07-09 | 2004-12-03 | 엘지산전 주식회사 | 레이저 센서를 이용한 차량 검지 장치 및 방법 |
| JP2005094843A (ja) * | 2003-09-12 | 2005-04-07 | Aruze Corp | 給電システム及び机 |
| JP4639773B2 (ja) | 2004-11-24 | 2011-02-23 | 富士電機ホールディングス株式会社 | 非接触給電装置 |
| JP2006288034A (ja) | 2005-03-31 | 2006-10-19 | Matsushita Electric Ind Co Ltd | 送受電装置 |
| US8169185B2 (en) * | 2006-01-31 | 2012-05-01 | Mojo Mobility, Inc. | System and method for inductive charging of portable devices |
| JP2008109762A (ja) * | 2006-10-24 | 2008-05-08 | Olympus Imaging Corp | 電力伝送装置 |
| US7772802B2 (en) * | 2007-03-01 | 2010-08-10 | Eastman Kodak Company | Charging display system |
| JP5362330B2 (ja) | 2007-12-18 | 2013-12-11 | 三洋電機株式会社 | 充電台 |
| JP5340017B2 (ja) * | 2009-04-28 | 2013-11-13 | 三洋電機株式会社 | 電池内蔵機器と充電台 |
| JP5362453B2 (ja) * | 2009-06-16 | 2013-12-11 | 三洋電機株式会社 | 充電台 |
-
2008
- 2008-11-17 JP JP2008293933A patent/JP5362330B2/ja not_active Expired - Fee Related
- 2008-12-16 US US12/314,743 patent/US8305036B2/en not_active Expired - Fee Related
-
2012
- 2012-09-14 US US13/617,134 patent/US8664914B2/en active Active
-
2013
- 2013-09-30 US US14/041,289 patent/US8786252B2/en active Active
-
2014
- 2014-06-06 US US14/297,920 patent/US9124106B2/en active Active
-
2015
- 2015-07-23 US US14/807,246 patent/US9312711B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014079167A (ja) * | 2007-12-18 | 2014-05-01 | Panasonic Corp | 充電台 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8664914B2 (en) | 2014-03-04 |
| US8305036B2 (en) | 2012-11-06 |
| US20140028253A1 (en) | 2014-01-30 |
| JP2009247194A (ja) | 2009-10-22 |
| US20130009596A1 (en) | 2013-01-10 |
| US20090153098A1 (en) | 2009-06-18 |
| US20140285144A1 (en) | 2014-09-25 |
| US20150326064A1 (en) | 2015-11-12 |
| US8786252B2 (en) | 2014-07-22 |
| US9312711B2 (en) | 2016-04-12 |
| US9124106B2 (en) | 2015-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5362330B2 (ja) | 充電台 | |
| JP5362453B2 (ja) | 充電台 | |
| JP5340017B2 (ja) | 電池内蔵機器と充電台 | |
| JP5496553B2 (ja) | 充電台 | |
| JP2010183706A (ja) | 充電台 | |
| US8410751B2 (en) | Device housing a battery and charging pad | |
| JP5775614B2 (ja) | 充電台 | |
| JP2009273327A (ja) | 電池内蔵機器と充電台 | |
| WO2013011905A1 (ja) | 充電台、パック電池と充電台、及び、パック電池 | |
| WO2012132144A1 (ja) | 充電台 | |
| JP2011259534A (ja) | 電池内蔵機器と充電台 | |
| JP2014212581A (ja) | 電池充電器と充電台、及び電池充電器 | |
| WO2013047260A1 (ja) | 電池内蔵機器と充電台、及び電池内蔵機器 | |
| JP5394135B2 (ja) | 充電台 | |
| WO2012173128A1 (ja) | 充電台 | |
| JP2012110085A (ja) | 電池内蔵機器及び電池内蔵機器と充電台 | |
| JP2013251954A (ja) | 電力搬送方法とこの電力搬送方法で電力搬送する携帯機器と電源台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091031 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120920 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130610 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130717 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130904 |
|
| LAPS | Cancellation because of no payment of annual fees |