JP5091601B2 - Sequin feeder and sewing machine capable of sequin sewing - Google Patents
Sequin feeder and sewing machine capable of sequin sewing Download PDFInfo
- Publication number
- JP5091601B2 JP5091601B2 JP2007244083A JP2007244083A JP5091601B2 JP 5091601 B2 JP5091601 B2 JP 5091601B2 JP 2007244083 A JP2007244083 A JP 2007244083A JP 2007244083 A JP2007244083 A JP 2007244083A JP 5091601 B2 JP5091601 B2 JP 5091601B2
- Authority
- JP
- Japan
- Prior art keywords
- sequin
- feed
- sewing
- sequin feed
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images























Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B3/00—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing
- D05B3/12—Sewing apparatus or machines with mechanism for lateral movement of the needle or the work or both for making ornamental pattern seams, for sewing buttonholes, for reinforcing openings, or for fastening articles, e.g. buttons, by sewing for fastening articles by sewing
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B35/00—Work-feeding or -handling elements not otherwise provided for
- D05B35/06—Work-feeding or -handling elements not otherwise provided for for attaching bands, ribbons, strips, or tapes or for binding
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05C—EMBROIDERING; TUFTING
- D05C7/00—Special-purpose or automatic embroidering machines
- D05C7/08—Special-purpose or automatic embroidering machines for attaching cords, tapes, bands, or the like
Description
本発明は、シークイン連結体からシークインを切断しつつ該シークインを被縫製体に縫着するミシンにおけるシークイン送り装置に関し、特に、縫い付けるシークインを縫いの途中で切替えることが可能なシークイン送り装置に関する。更には、異なるピッチのシークインを組み合わせて縫い付けるのに適したミシンに関する。 The present invention relates to a sequin feed device in a sewing machine that sews a sequin to a sewing object while cutting the sequin from a sequin coupling body, and more particularly to a sequin feed device that can switch sequins to be sewn during sewing. Furthermore, the present invention relates to a sewing machine suitable for sewing sequins having different pitches in combination.
従来のシークイン送り装置としては、例えば、下記特許文献1あるいは特許文献2又は3に示されたものが知られている。このようなシークイン送り装置は、多数のシークイン(スパンコール)を連結してなるシークイン連結体を巻回収納したリールから該シークイン連結体を繰り出して支承板の上面に載置し、送りレバーの前進及び後退動作によってシークイン連結体を1個分のシークインのサイズに対応する所定ピッチで送り出す送り機構を備え、ミシンの針棒の縫い動作に連動して送り出されたシークイン連結体から1個のシークインを切断しつつシークインを被縫製体に縫着するようになっている。
また、下記特許文献4においては、シークイン送り装置を刺繍ミシンの縫いヘッドに装着することで、刺繍布等の被刺繍物にシークインを縫い付けることができるようにした刺繍ミシンが示されている。
一方、下記特許文献5及び6においては、縫いの途中でシークインを切替えながら縫い付けることができるようにした装置が示されている。この従来装置では、それぞれ所定の形及び色のシークインが連結されたシークイン連結体を巻回した二つのシークインリールと、これらから繰り出したシークイン連結体を針元に向かって個別に送り出すための個別の送り棒とが備えられており、送り棒による送り動作を制御信号に基づいて選択することで、送り出すシークイン連結体を切替えながら連続的にシークイン縫いを行なうことができる。しかし、シークイン連結体からシークインを切断するためのカッターは、共通のものが1つしか設けられておらず、2つのシークイン連結体のうち送り出された方のシークイン連結体のシークインを該共通のカッターで切断する構成からなっている。そのため、2つのシークイン連結体におけるシークインのサイズは互いに異ならせることができるが、一旦それぞれ所定のサイズのシークインをセットするように装置を構成すると、もうサイズの自由な変更ができないものとなっている。なぜならば、2つの系列のシークインのサイズを互いに異ならせる場合、2つのシークイン連結体に共用されるカッターの構造が、所定の段差構造を持つ可動カッターと、同じく所定の段差構造を持つ固定刃(カッター台)とからなり、これらの可動カッター及び固定刃の段差構造は機械的に固定されたものとならざるを得ないからである。
本発明は上述の点に鑑みてなされたもので、縫い付けるシークインを縫いの途中で切替えることが可能なように複数系列のシークイン送りユニットを備え、各系列におけるシークイン送り量を任意に変更することができるようにしたシークイン送り装置を提供しようとするものである。また、そのようなシークイン送り装置を使用して、異なる任意の送りピッチのシークインを組み合わせて縫い付けるのに適したミシンを提供しようとするものである。 The present invention has been made in view of the above points, and includes a plurality of sequin feed units so that sequins to be sewn can be switched during sewing, and the sequin feed amount in each series can be arbitrarily changed. It is an object of the present invention to provide a sequin feeder capable of performing the above. Further, the sewing machine is intended to provide a sewing machine suitable for combining and sewing sequins having different arbitrary feed pitches using such a sequin feeder.
本発明に係るシークイン送り装置は、シークイン連結体を所定の切断位置に向けて送り出すためのシークイン送り機構と、前記所定の切断位置に配置されたシークイン切断用のカッター部とをそれぞれ含む少なくとも2つのシークイン送りユニットと、前記少なくとも2つのシークイン送りユニットのうち1つのユニットを選択して所定の縫い動作位置に位置決めするシークイン選択機構と、前記所定の縫い動作位置に位置決めされた前記1つのシークイン送りユニットの前記シークイン送り機構に係合して、縫い動作に応じて該係合したシークイン送り機構を駆動し、前記シークイン連結体を所定の切断位置に向けて送り出す駆動機構とを備え、前記各シークイン送りユニットは、それぞれの前記所定の切断位置を他のユニットとは独立に調整可能であり、縫い動作に応じて前記カッター部を駆動し、前記所定の切断位置に送り出された前記シークイン連結体からシークインを切断することを特徴とする。
本発明に係るミシンは、上記シークイン送り装置を縫いヘッドに対応づけて具備するものである。
The sequin feeding device according to the present invention includes at least two sequin feeding mechanisms for feeding the sequin coupling body toward a predetermined cutting position, and a sequin cutting cutter disposed at the predetermined cutting position. A sequin feed unit, a sequin selection mechanism for selecting one of the at least two sequin feed units and positioning it at a predetermined sewing operation position, and the one sequin feed unit positioned at the predetermined sewing operation position Each sequin feed mechanism, and a drive mechanism that drives the sequin feed mechanism engaged according to a sewing operation and feeds the sequin coupling body toward a predetermined cutting position. Each unit has its predetermined cutting position independent of other units. A possible integer, drives the cutter unit in accordance with sewing operation, characterized by cutting the sequin from fed out the continuous sequin strip to the predetermined cutting position.
The sewing machine according to the present invention comprises the sequin feeding device in association with the sewing head.
各シークイン送りユニットは、それぞれ個別に、シークイン送り機構とカッター部を有しており、各シークイン送りユニットはそれぞれの前記所定の切断位置を他のユニットとは独立に調整可能である。従って、各ユニットにおいては、それぞれ独立に、針落ち位置に対する前記カッター部によるシークイン切断位置を任意に調整することができる構成となっており、それぞれ任意の送りサイズのシークインを取り扱うことができる。これにより、それぞれの系列におけるシークイン送り量をそれぞれ独立に任意に変更することができるので、本発明に係るシークイン送り装置を適用したミシンにおいては、任意の異なる送りピッチのシークインを組み合わせてシークイン縫いを行うことができるようになる。 Each sequin feed unit has a sequin feed mechanism and a cutter unit, and each sequin feed unit can adjust the predetermined cutting position independently of other units. Accordingly, each unit has a configuration in which the sequin cutting position by the cutter unit with respect to the needle drop position can be arbitrarily adjusted independently, and sequins of any feed size can be handled. As a result, the sequin feed amount in each train can be arbitrarily changed independently, so that in the sewing machine to which the sequin feed device according to the present invention is applied, the sequin sewing is performed by combining the sequins of arbitrary different feed pitches. Will be able to do.
以下、添付図面を参照してこの発明の実施の形態の一例を詳細に説明する。
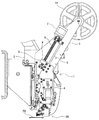
図1には、4つのミシンヘッドHを有する4頭立て刺繍ミシンが示してある。各ミシンヘッドHには針棒ケース2が設けてあり、各針棒ケース2の下方には針板70が配置してある。シークイン送り装置1は各針棒ケース2の左サイド及び/または右サイドにそれぞれ装着されるようになっており、本実施例では左サイドにのみ装着してある。各針棒ケース2は多針構成からなり、本実施例のようにシークイン送り装置1を針棒ケース2の左サイドに装着する場合は、針棒ケース2内の最左端の針棒をシークイン縫い用の針棒(シークイン針棒)として使用する。通常知られているように、刺繍枠80は縫いデータに応じて横方向(X方向)及び縦方向(Y方向)に駆動される。
Hereinafter, an example of an embodiment of the present invention will be described in detail with reference to the accompanying drawings.
In FIG. 1, a four-head embroidery sewing machine having four sewing heads H is shown. Each sewing head H is provided with a
〔第1実施例〕
まず、第1実施例に係るシークイン送り装置1について説明する。
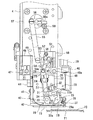
図2は1つのシークイン送り装置1の部分を拡大して示す右側面図、図3はその左側面図、図4はその正面図であってシークイン送り装置1のみを示したものである。シークイン送り装置1をミシンヘッドHに取り付けるためのベース部材として、針棒ケース2の左側面に固定されたベース3と、該固定ベース3に昇降可能に配置された取付ベース4とが設けられている。ベース3には2本の案内ロッド5が固定してあるとともに、ねじ軸6が軸支してある(図3において、もう1本の案内ロッド5はねじ軸6の裏側に位置している)。ねじ軸6はベース3に固定されたモータ7のモータ軸に連結してある。取付ベース4には、2本の案内ロッド5にスライド可能に嵌合された移動体8が固定してある。移動体8にはねじ軸6に螺合したナット部材9が固定してある。これにより、モータ7の駆動によってねじ軸6が回転すると、取付ベース4が案内ロッド5に沿って、シークイン送り装置1がシークインの縫い付けを行う下降位置と、シークイン送り装置1がシークインの縫い付けを行わない退避位置との間で昇降されることとなる。なお、図2及び図3は、シークイン送り装置1が上記下降位置に位置している状態を示しており、図5及び図6は、シークイン送り装置1が上記退避位置に位置している状態を示している。更に、取付ベース4には、該取付ベース4が下降位置にあるときにベース3の左右両面にその先端を突出して固定した両位置決め板11の間に嵌合する位置決めブロック12が固定してある。この位置決めブロック12が両位置決め板11の間に嵌合することにより、下降位置にある取付ベース4の左右(横方向)の位置決めがされる。
[First Example]
First, the
FIG. 2 is an enlarged right side view showing a part of one
1つのシークイン送り装置1は、大別して、2つのシークイン送りユニット20,21と、該2つのシークイン送りユニット20,21のうち1つのユニットを選択して所定の縫い動作位置に位置決めするシークイン選択機構(図7等を参照して後述する符号44〜50,60〜67等の部分)と、所定の縫い動作位置に位置決めされた1つのシークイン送りユニットのシークイン送り機構19に係合して、縫い動作に応じて該係合したシークイン送り機構19を駆動し、シークイン連結体13を所定の切断位置に向けて送り出す送り駆動機構(図7等を参照して後述する符号51〜59等の部分)とを備えている。これらのシークイン送りユニット20,21、シークイン選択機構(44〜50,60〜67等)、送り駆動機構(51〜59等)は、前記取付ベース4に搭載されており、前記固定ベース3に対する該取付ベース4の上記昇降に伴い、シークインの縫い付けを行わない退避位置と、シークインの縫い付けを行う下降位置との間で、これらが昇降される。
One
また、各シークイン送りユニット20,21は、シークイン連結体13を所定の切断位置に向けて送り出すためのシークイン送り機構19と、該所定の切断位置に配置されたシークイン切断用のカッター部(図7等を参照して後述する符号36,23bの部分)とをそれぞれ含む。ここで、各シークイン送りユニット20,21に対応してシークイン連結体13を供給するために、所望のシークイン連結体13を巻回したリール(シークイン収納部)14が、図4に示すように2系列で設けられている。各シークイン送りユニット20,21に対応するリール14には、それぞれ任意の形状、色、サイズ(針通し孔から外縁までの寸法に応じた送りサイズ)のシークインを連結してなるシークイン連結体13を巻回して収納している。すなわち、1つのシークイン送り装置1を使用して、1つの刺繍柄において縫い付けされるべきシークインとして2種類の異なるシークインを適宜組み合わせて、シークイン縫いを行うことができるようになっており、そのような組み合わせシークイン縫いデザインの目的にあった2種類の異なるシークインのシークイン連結体13をそれぞれ収納した2つのリール14(供給源)が、図4に示すように、セットされる。例えば、図4で、左側のリール14が左側のシークイン送りユニット20に対応し、右側のリール14が右側のシークイン送りユニット21に対応している。
Each
これらの2個のリール14は、図4に示すように、固定ベース3に設けられたリール取付軸に対して同軸で並列に取り付けられる。更に、固定ベース3には、各リール14から繰り出されたシークイン連結体13を案内する第1ローラ15、第2ローラ16、第3ローラ17が支持してあり、また、取付ベース4には第4ローラ18が支持してある。これらの各ローラもそれぞれ2個並列に設けてある。また、第1ローラ15、第2ローラ16の間には2つのテンションローラ10が設けてある。テンションローラ10はそれぞれ第1ローラ15、第2ローラ16の軸上に回動可能に設けられたテンションベース72、73に支持してある。第1ローラ15、第2ローラ16の軸上にはトーションバネ(図示省略)が設けてあり、図2においてテンションベース72は時計方向に、テンションベース73は半時計方向に付勢され、常にはベース3に固定したストッパ74にそれぞれ当接している。
As shown in FIG. 4, these two
リール14から繰り出したシークイン連結体13は、第1ローラ15、テンションローラ10、第2ローラ16、第3ローラ17、第4ローラ18の順に図2に示すよう掛け渡され、取付ベース4に設けたシークイン送り機構19へと案内される。これにより、取付ベース4が退避位置に退避するときには、第4ローラ18によってシークイン連結体13が適切に手繰り上げられることになり、退避位置へ移動する時に、シークイン連結体13が余って大きく弛むことが起こらない。
The
図7はシークイン送り装置1におけるシークイン送りユニット20,21、シークイン選択機構(44〜50,60〜67等)、送り駆動機構(51〜59等)の部分を更に拡大して背面側から見た斜視図、図8はその背面図、図9は図8のI−I線断面図である。これらの図より明らかなように、取付ベース4において2つのシークイン送りユニット20,21が対向して設けられており、これらのユニット20,21は、取付ベース4に設けられたスライド用のロッド47,48に沿って該取付ベース4に対して横スライド可能となっている。このスライド動作は、シークイン選択機構(44〜50,60〜67等)によって行われ、シークイン送りユニット20,21のどちらか一方を選択して送り駆動機構(51〜59等)に連結させ、該送り駆動機構(51〜59等)の駆動力を該連結された一方のシークイン送りユニット20,21に伝達することで、該選択された1つのシークイン送りユニット20,21からシークインを送り出すようにしている。
FIG. 7 is a further enlarged view of
対向して設けられた2つのシークイン送りユニット20,21は同一の機械的要素で構成されているものであるが、両者間ではその機械的配置及び形状が対称性をなしている。そこで、図9を参照して、一方のシークイン送りユニット20についてのみ、その各構成要素の詳細を説明する。1つのシークイン送りユニット20は、大別して、支持プレート22と、該支持プレート22の下端にて水平に設けられた支承板23と、該支持プレート22に搭載された各種要素(符号24〜35等)で構成されるシークイン送り機構19と、支承板23の先端の切断位置に配置されたカッター部(固定刃23bと可動刃36)とで構成される。対応するリール14から繰り出されたシークイン連結体13が支承板23上に導かれ、シークイン送り機構19によって切断位置つまりカッター部の方に送られるようになっている。支承板23には前後方向(Y方向)に適宜の幅のスリット23aが設けてある(図10参照)。このスリット23aには、後述するように、シークイン送り機構19におけるロックレバー33の係合爪33aが侵入しうるようになっている。
The two
まず、シークイン送り機構19について詳細を説明する。支持プレート22に支持された軸24には連係アーム25が固定してあり、連係アーム25の自由端には先端に傾斜面が形成された連係ピン26が固定してある。軸24には揺動アーム27がネジ28により固定してあり、揺動アーム27の自由端には、先端に引掛け部29aの形成された送りレバー29が軸30により回動自由に支持されている。軸30には送りレバー29を時計方向に付勢するトーションバネ(図示省略)が設けてあり、送りレバー29の先端側が常に支承板23に接近する方向に付勢される。また、この送りレバー29の時計方向への付勢によって、揺動アーム27がストッパ31と当接する方向へ付勢される。ストッパ31は、支持プレート22に固定したブラケット32に螺着されたネジ棒からなり、ナットの締め付けによりロックされるもので、その後端に揺動アーム27が当接する。送りレバー29の上方にはロックレバー33が設けてある。ロックレバー33は、一端側の先端に係合爪(係合突起)33aが、他端側にストッパ部33bが形成されており、その中間部が、支持プレート22に取付けられた支持ブロック34に対してピン35により回動自由に支持してある。ロックレバー33の係合爪33aは送りレバー29に形成された透孔29bを貫通している。支持ブロック34に設けられたピン35にはトーションバネ(図示省略)が設けられており、該トーションバネによりロックレバー33は反時計方向に回動付勢されている。この回動付勢により、ロックレバー33は自由状態においてはストッパ部33bが支持ブロック34の受止め部34aに当接し、係合爪33aの端部が支承板23のスリット23a内に臨む姿勢に保持されるようになっている。この姿勢に保持されたロックレバー33の係合爪33aは、支承板23上に導かれたシークイン連結体13のうちの1つのシークインSの縫止孔Saに係合し、縫い付け時(切断時)にシークイン連結体13を移動不能にロックする。
First, details of the
次に、固定刃23bと可動刃36とで構成されるカッター部について詳細を説明する。支承板23の先端には可動刃36がピン37により回動自由に支持してあり、トーションバネ38によって常には支承板23の端縁に形成された固定刃23bから上方に離間した退避姿勢に保持されている。可動刃36は針棒39が下降したときその下端の針抱き40により押されるようになっており、針抱き40により押されると、トーションバネ38の弾力に抗して揺動し、固定刃23bと協働して先端のシークインSの接合部Sb(図10参照)を切断する。針棒39とともに針抱き40が上昇すると、可動刃36はトーションバネ38の復元力により退避姿勢に戻る。
Next, the details of the cutter unit composed of the fixed
次に、リール14から繰り出されたシークイン連結体13を各シークイン送りユニット20又は21にガイドするためのガイド機構について、図9を参照して説明する。支持プレート22にはブラケット41が固定してあり、ブラケット41にはシークイン連結体13を支承板23上に導くガイド部42が設けてある。ガイド部42はシークイン連結体13の幅に応じて交換可能となっている。ブラケット41には、バネ鋼鈑のような弾力を有する板材で形成した押え部材43が固定してある。押え部材43は、その自由端が支承板23の上面に弾接しており、ガイド部42から導いたシークイン連結体13をその間に挿通させるようになっている。
Next, a guide mechanism for guiding the
次に、シークイン選択機構(44〜50,60〜67等)について説明する。上記構成からなるシークイン送りユニット20、21は、図7に示すように、それぞれ固定ブラケット44を介して、スライドプレート45に固定してある。スライドプレート45の左右端部にはスライド体46が固定してある。両スライド体46は取付ベース4に固定された第1ロッド47に摺動自在に支持してある。両固定ブラケット44には第2ロッド48が掛け渡して設けてある。第2ロッド48は支持部材49の2つの支持部49aに摺動自在に支持してある。支持部材49はブラケット50に固定してあり、ブラケット50は取付ベース4に固定されている(詳しくは軸受体51を介して取付ベース4に固定してある)。
Next, the sequin selection mechanism (44-50, 60-67, etc.) will be described. The
なお、図7は、一方の(以下、「第1の」という)シークイン送りユニット20が選択されている状態を示している。図11は、図7の状態におけるシークイン送りユニット20,21とシークイン選択機構の部分を更に拡大して示す正面図である。図12は、図11と同様の正面図であるが、他方の(以下、「第2の」という)シークイン送りユニット21が選択されている状態を示している。また、図13は、図7と同様の斜視図であるが、図12のように他方のシークイン送りユニット21が選択されている状態を示している。
FIG. 7 shows a state in which one (hereinafter referred to as “first”)
図11より明らかなように、スライドプレート45には連結アーム60の一端が枢支してある。連結アーム60の他端は、取付ベース4に固定されたモータベース61に回動可能に支持された回動アーム62の一端と連結してある。モータベース61に固定されたモータ63のモータ軸には駆動アーム64が固定してあり、駆動アーム64の自由端は回動アーム62の他端に連結目金65を介して連結してある。これにより、モータ63を往復駆動すると、2つのシークイン送りユニット20,21が一体的に左右に(横方向つまりX方向に)スライドすることとなる。第1ロッド47にはシークイン送りユニット20,21のスライド位置の限界を規定する規制部材66が、左側のスライド体46の左右両側にそれぞれ設けてある。図11に示すように、左側のスライド体46が右側の規制部材66に緩衝体67を介して当接したスライド位置のときは、第1のシークイン送りユニット20を選択してこれを所定の縫い動作位置に位置決めした状態である。なお、図8は、同様に第1のシークイン送りユニット20が選択された状態を示している。このように第1のシークイン送りユニット20を選択して所定の縫い動作位置に位置決めした状態においては、図8に示すように、該第1のシークイン送りユニット20の連係アーム25の連係ピン26が、送り駆動機構(51〜59等)における伝達レバー54の係合部54aと係合するとともに、該第1のシークイン送りユニット20によって送り出すシークインSの縫止孔Saが針落ち位置(針板70の針通し孔71の位置)と合致する。
As apparent from FIG. 11, one end of the connecting
一方、図12に示すように、左側のスライド体46が左側の規制部材66に緩衝体67を介して当接したスライド位置のときは、第2のシークイン送りユニット21を選択してこれを所定の縫い動作位置に位置決めした状態である。この状態では、第2のシークイン送りユニット21の連係ピン26が送り駆動機構(51〜59等)における伝達レバー54の係合部54aと係合する(図13参照)とともに、送りユニット21にて送り出すシークインSの縫止孔Saが針落ち位置(針板70の針通し孔71の位置)と合致する。このように、2つのシークイン送りユニット20,21を一体的にスライドさせることでいずれかのユニット20、21が選択的に所定の縫い動作位置に位置決めされる。そして、後述するように、選択した送りユニットを使用してシークインの縫い付けが行われるようになる。なお、変形例として、2つのシークイン送りユニット20,21を一体的にスライドさせることなく、どちらか一方を選択的に動かすことで、一方のシークイン送りユニットを選択的に所定の縫い動作位置に位置決めするように設計変更することも可能である。
On the other hand, as shown in FIG. 12, when the
なお、一連のシークイン模様縫いを行っている途中で縫い付けるべきシークインを切り替えるために、シークイン送りユニット20又は21を選択するために行うシークイン選択機構(44〜50,60〜67等)によるスライド動作は、針棒39が上方にある間に行うようにする。そうすれば、シークインを切り替えるために針棒39の上下動を休止(所謂ジャンプ)しなくともよいことになり、縫い作業の効率が向上する。
In addition, a sliding operation by a sequin selection mechanism (44 to 50, 60 to 67, etc.) performed to select the
次に、送り駆動機構(51〜59等)について説明する。図7あるいは図9を参照すると、取付ベース4に取り付けられた前記軸受体51には回動軸52が回動自在に支持してあり、回動軸52には従動レバー53及び伝達レバー54が固定してある。伝達レバー54の自由端には、各シークイン送りユニット20,21の前記連係アーム25の前記連係ピン26と係合するU字状の凹部からなる係合部54aが形成してある。このU字状の凹部からなる係合部54aは、上述のようにシークイン送りユニット20,21が横方向にスライドされるとき、各ユニット20,21の連係ピン26が該係合部54aに対して相対的に横方向に動くことを許し、これによって、選択された1つのシークイン送りユニット20,21の連係ピン26のみが係合部54aに係合することとなる。なお、各連係ピン26の先端には傾斜面を形成しておき、その係合がスムーズに行われるようにするとよい。なお、このような傾斜面は伝達レバー54の係合部54aの側に形成してもよいし、あるいは、連係ピン26と係合部54aの双方に形成してもよい。
Next, the feed drive mechanism (51 to 59, etc.) will be described. Referring to FIG. 7 or FIG. 9, a rotating
従動レバー53の自由端は連結リンク55を介して駆動レバー56の自由端に連結してある。駆動レバー56は、取付ベース4の左側面に固定されたモータ57のモータ軸に固定してある。回動軸52にはトーションバネ58が設けてあり、従動レバー53及び伝達レバー54が図9において時計方向に揺動付勢され、常には駆動レバー56の当接片56aがストッパ59と当接することとなる。シークインを送り出す場合は、モータ57を図9において反時計方向に所定角度だけ回動し、その後、時計方向に所定角度だけ回動する(戻す)、という所定角度範囲の1往復ストローク駆動を行う。
The free end of the driven
次に、シークイン送り機構19によるシークイン送り動作について説明する。往動時における前記モータ57の反時計方向の回転駆動に応じて、駆動レバー56が反時計方向に所定角度だけ回動され、連結リンク55の下端と従動レバー53の自由端との連結点が下向きに反時計方向に所定角度だけ回動され、これに伴い、回動軸52が反時計方向に所定角度だけ回動され、伝達レバー54の下端の係合部54aが後方(図9で右方向つまり反時計方向)に駆動される。この係合部54aの後方駆動に応じて、該係合部54aに係合している1つの送りユニット(20又は21)のシークイン送り機構19の連係ピン26が一緒に後方に動く。該1つの送りユニット(20又は21)のシークイン送り機構19では、連係ピン26の動きに応じて、軸24を中心にして、連係アーム25及び揺動アーム27が図9で時計方向に動かされ、該揺動アーム27の自由端(下端)に支持されている送りレバー29が前方(図9で左方向)に動かされる。次に、復動時のモータ57の時計方向の回転駆動に応じて、各要素が、上述とは逆方向に動かされ、揺動アーム27の自由端(下端)に支持されている送りレバー29が後方(図9で右方向つまり所定の切断位置の方向)に動かされる。
Next, the sequin feed operation by the
往動時又は復動時における該送りレバー29の1ストローク長が、シークイン連結体13の1ピッチ分の送り量にほぼ対応している。このシークイン送り動作は、前述の特許文献4(特開2004-167097号公報)に詳しく説明されているように、図10に示す先端のシークインSの縫い付け(及びそれに伴う接合部Sbでの切断)が終わった後に行われる。このとき、次のシークインS1の縫止孔に送りレバー29の先端の引掛け部29aが係合しており、かつ、前述のロックレバー33の係合爪33aが、そのいくつか(例えば2つ)後に続くシークインの縫止孔に係合している。
One stroke length of the
このシークイン送り動作は、前述の特許文献4(特開2004-167097号公報)において詳しく説明されているものと同じであるが、以下、簡単に説明する。往動時に、前述のように送りレバー29が前方(図9,図10で左方向)に動かされると、まず、送りレバー29の引掛け部29aがシークインS1の縫止孔から抜け出すが、この抜け出し時にはまだロックレバー33の係合爪33aが後続のシークインの縫止孔に係合したままとなっているため、送りレバー29の引掛け部29aがシークインS1の縫止孔から抜け出る際の衝動でシークイン連結体13が移動してしまうのが確実に防止される。この状態から送りレバー29がさらに前方(図9,図10で左方向)に動くと、送りレバー29の透孔29bの口縁との係合によってロックレバー33が前記トーションバネの付勢力に抗して図9で時計方向に回動し、その係合爪33aがシークインから上方に離間し、該係合爪33aのシークインの縫止孔に対する係合が解かれる。そして、往動ストロークの終わりでは、送りレバー29の引掛け部29aがシークインS1の隣のシークインの縫止孔よりも少しだけ前方(図9,図10で左方向)に位置し(つまり縫止孔には入り込んでいない)、ロックレバー33も上方に位置したままになっている。なお、変形例として、往動ストロークの終わりでは、送りレバー29の引掛け部29aがシークインS1の隣のシークインの縫止孔に入り込むようにしてもよい。なお、往動ストローク時において、ロックレバー33の係合爪33aとの係合も解かれたシークイン連結体13は、押え部材43のバネ弾力によって押えられるので、送りレバー29の動きに伴って一緒に動くことはない。
This sequin feed operation is the same as that described in detail in the above-mentioned Patent Document 4 (Japanese Patent Laid-Open No. 2004-167097), but will be briefly described below. When the
次に、復動時に、前述のように送りレバー29が後方(図9,図10で右方向)に動かされると、送りレバー29の引掛け部29aがシークインS1の隣のシークインの縫止孔に係合し、その係合により、シークイン連結体13を所定の切断位置の方(図9,図10で右方向)に送り出す。その動きの過程で、送りレバー29の透孔29bの口縁がロックレバー33から離間すると、送りレバー29の透孔29bの口縁による係止が解かれて、ロックレバー33は、前記ピン35に設けられたトーションバネの弾力によって反時計方向に回動付勢される。これによって、該ロックレバー33の係合爪33aが、シークイン連結体13の上面に弾接し、シークインの上面を相対的に摺動する。復動ストロークの終わりでは、先端のシークインS1が図10に示す先端のシークインSと同様に、所定の切断位置(つまり縫い付け位置)に到達する。そして、上記したように、ロックレバー33の係合爪33aがシークイン連結体13の所定のシークインの縫止孔に係合する。
Next, when the
次に、各シークイン送りユニット20、21における切断位置(縫い針77に対する位置)の可変調整するための調整機構(68,69)につき説明する。図14は、一方のシークイン送りユニット21の支持プレート22をシークイン送り機構19が設けられた側とは反対側から見た側面図である。図14に示すように、支持プレート22はネジ68により固定ブラケット44に固定してある。固定ブラケット44のネジ68が貫通する孔44aは長孔に形成してある。固定ブラケット44には、その先端が支持プレート22に形成したネジ孔に螺合している調整ネジ(又はボルト)69が、回転自在であるがネジ軸方向には動かないように、設けてある。支持プレート22を固定しているネジ68を緩め、調整ネジ69を右回し又は左回しすることにより、支持プレート22が固定ブラケット44に対して前又は後に直線的に動かされて、その前後位置が調整される。所望の位置に調整したら、ネジ68を締めて支持プレート22を固定ブラケット44に固定する。
ところで、この支持プレート22の位置調整を行なうことによって、連係アーム25の連係ピン26の位置も前後動し、復帰位置にある伝達レバー54の係合部54aに対する位置関係が狂うことになるが、支持プレート22の位置調整を行う際には、連係アーム25を軸24に固定しているネジ81(図8参照)を予め緩めて連係アーム25をフリー状態にしておけば、支持プレート22を移動させたときに、復帰位置にある伝達レバー54が揺動することはなく、調整後にネジ81を締めて連係アーム25を軸24に固定すればよい。
Next, an adjustment mechanism (68, 69) for variably adjusting the cutting position (position with respect to the sewing needle 77) in each
By the way, by adjusting the position of the
この支持プレート22の位置調整によって、当該シークイン送りユニット21の前後位置が調整されることになる。ミシンヘッドの針棒39に取り付けられた縫い針77の位置(水平方向位置)は相対的に固定されているので、このような当該シークイン送りユニット21の前後位置の調整によって、該縫い針77に対するカッター部(36,23b)の位置つまり切断位置(縫い針77の上下動軸線と固定刃23bとの間の水平方向の距離)が調整される。この切断位置は、当該シークイン送りユニット21にセットするシークイン連結体13のシークインのサイズ(図10に示す縫止孔Saから接合部Sbまでの距離)に応じて調整する。従って、当該送りユニット21に対応して取り付けられるリール(シークイン収納部)14を、それまでとは異なるサイズ(送りサイズ)のシークイン連結体13を収納したリール(シークイン収納部)14と交換するとき、この切断位置調整を行う。具体的には、例えば、シークイン連結体13を収納したリール14を新たに装着したとき、そこからシークイン連結体13を繰り出して支承板23の上に置き、その先端のシークインSを図10に示すように固定刃23bよりも先に出して接合部Sbが固定刃23bの位置に合致するようにした上で、該先端のシークインSの縫止孔Saの中心が縫い針77の中心に合致するように、調整ネジ69を右回し又は左回しして送りユニット21の前後位置を調整する。
By adjusting the position of the
なお、このような倣い調整に限らず、装着したリール14に収納されたシークインの縫止孔Saから接合部Sbまでの距離のデータに基づき、縫い針77の中心から固定刃23bまでの距離を測定しながら、この測定距離が、該データによって示される距離に等しくなるように調整してもよい。また、データに基づく調整と倣い調整を組み合わせてもよい。更に、調整ネジ69に関連して適宜の目盛りを設けておき、調整ネジ69の現在設定状態と切断位置(縫い針77の中心から固定刃23bまでの距離)との対応が把握できるようにしてもよい。調整機構としては、調整ネジ69を用いたものに限らず、その他の直線変位機構を用いたものであってもよい。あるいは、調整ネジ69を設けることなく、支持プレート22を固定しているネジ68を緩めた状態で、手で支持プレート22を掴んで動かすことでその前後位置を調整するようにしてもよい。逆にリニアモータのような駆動手段を用いて対応するシークイン送りユニット20または21を自動的に直線変位させることでそれぞれの切断位置を可変調整するようにしてもよい。
The distance from the center of the
もう一方のシークイン送りユニット20の切断位置を調整する機構も上記と同様に構成されている。ただし、各シークイン送りユニット20,21は、それぞれ独立にその切断位置つまり縫い針77に対するカッター部(36,23b)の位置つまり切断位置が調整可能である。すなわち、各シークイン送りユニット20,21は、前述のスライドプレート45の動きに応じて固定ブラケット44と共に横方向には一体的にスライド可能であるが、前後方向に関してはそれぞれ固定ブラケット44に対して独立に位置調整可能であるから、それぞれ独立にその切断位置を調整することができる。こうして、各シークイン送りユニット20、21にセットされたシークイン連結体13のシークインのサイズ(シークインの縫止孔Saから接合部Sbまでの距離)に合わせて、それぞれの切断位置を調整すると、そのサイズが異なる場合には、図15に示すように、各送りユニット20、21の両支承板23の前後の配置位置つまりカッター部(36,23b)の位置が適宜異なることとなる。
The mechanism for adjusting the cutting position of the other
次に、各シークイン送りユニット20、21におけるシークイン送り機構19のシークイン送り量(送りピッチ)の可変設定につき説明する。いずれかのシークイン送りユニット20、21において、送りピッチを調整すべきシークイン連結体13を収納したリール14を新たに装着したとき、該ユニット20又は21のシークイン送り機構19のシークイン送り量(送りピッチ)の調整を行う。まず、揺動レバー27を固定しているネジ28(図9参照)を緩め、回動軸24に対して揺動レバー27を手で容易に回せるようにする。また、ストッパ31のナットネジを緩めてロックを解除し、かつ、シークイン連結体13をリール14から支承板23上に繰り出して、その先端のシークインSを図10に示すように固定刃23bよりも先に出して接合部Sbが固定刃23bの位置に合致するようにする。この状態は、当該シークイン送り機構19の1ピッチ分のシークイン送り出しが終了した状態に該当する。この「送り出し終了状態」で、揺動レバー27と送りレバー29を手で動かして、先端から2番目のシークインS1の縫止孔に送りレバー29の引掛け部29aを係合させる。つまり、当該シークインについての1ピッチ分の「送り出し終了状態」に、揺動レバー27と送りレバー29を倣わせる。このように「送り出し終了状態」に倣った揺動レバー27及び送りレバー29の状態を固定するために、ストッパ31のナットを締めてロックし、かつネジ28を締めて回動軸24に対して揺動レバー27を固定する。
Next, variable setting of the sequin feed amount (feed pitch) of the
次に、揺動レバー27及び送りレバー29並びに支承板23上のシークイン連結体13を上記のように「送り出し終了状態」にしたままで、ロックレバー33の支持ブロック34のロックを解除し、ロックレバー33の調整を行う。ロックレバー33の上端のストッパ部33bが支持ブロック34の受止め部34aに当接した状態で、ロックレバー33の係合爪33aが支承板23上のシークイン連結体13における所定のシークイン(送りレバー29の引掛け部29aが係合したシークインS1からいくつか(例えば2つ)後に続くシークイン)の縫止孔に係合するよう、支持ブロック34の前後位置を手動調整してロックレバー33の位置を調整する。このようにロックレバー33の位置を調整した状態で、支持ブロック34をロックする。
Next, the
シークイン送り機構19のシークイン送り量(送りピッチ)の可変設定に際しては、上記のように、まず、「送り出し終了状態」つまり1ピッチ分の送りを行う往復ストロークの始まり=終わり位置の設定・調整が、揺動レバー27、送りレバー29及びロックレバー33の機械的な位置調整で行われる。次に、1ピッチ分の送りを行う往復ストロークにおける往動ストロークの終わり=復動ストロークの始まりの位置については、1ピッチ分の送り駆動を行うモータ57の回転範囲を送りレバー29の1ピッチ分の送り量に対応する値にデータ設定することで行う。このデータ設定は、ミシンの操作パネル90(図1)で手動設定操作を行うことで設定されるようにしてもよいし、あるいは、刺繍縫いデータの中にシークイン送り量設定データとして組み込んでおくようにしてもよい。勿論、1ピッチ分の送り量を設定するためのデータ設定は、各ユニット20,21毎に独立に行われる。すなわち、共通のモータ57が送り駆動に使用されるのであるが、第1のシークイン送りユニット20のための送り駆動を行うときは該ユニット20のために設定された送り駆動量(回転範囲)でモータ57が駆動制御され、第2のシークイン送りユニット21のための送り駆動を行うときは該ユニット21のために設定された送り駆動量(回転範囲)でモータ57が駆動制御される。
When the sequin feed amount (feed pitch) of the
なお、基本的には、繰り出しすべきシークインのサイズ(直径)を1ピッチとして送り出しを行えばよいが、実用的には、シークイン連結体13の送り出しをより確実とするために、シークインのサイズ(直径)より若干大きめの値を送りレバー29の1ピッチ分の送り量として設定するようにしている。例えば、直径6mmのシークインの場合、1送りピッチを7mm程度に設定し、あるいは、直径4mmのシークインの場合、1送りピッチを5mm程度に設定する。このように、送りレバー29の1ピッチ分の送り量を、シークインのサイズ(直径)より若干大きめの値に設定することにより、前述のように、送りレバー29の往動ストロークの終わりでは、送りレバー29の引掛け部29aが先頭のシークインS1の隣に後続するシークインの縫止孔よりも少しだけ前方(図9,図10で左方向)に位置する(つまり縫止孔には入り込んでいない)ことになる。この状態から復動ストロークが始まると、すぐに、送りレバー29の引掛け部29aが先頭のシークインS1の隣に後続するシークインの縫止孔に入り込んで係合し、シークイン連結体13を切断位置の方向に送り出すことができる。原理的には、送りレバー29の1ピッチ分の送り量をシークインのサイズ(直径)と同じ値に設定してもよいのであるが、その場合、誤差によって、送りレバー29の往動ストロークの終わりで送りレバー29の引掛け部29aが先頭のシークインS1の隣に後続するシークインの縫止孔に入り込まずに、その手前で止まってしまうことが起こるかもしれない。もしそうなると、次に送りレバー29が復動ストロークを始めても、送りレバー29の引掛け部29aがシークインの縫止孔に係合することなく、シークイン連結体13の送り動作は行われないことになる。そのような不都合を未然に防ぐために、送りレバー29の1ピッチ分の送り量をシークインのサイズ(直径)より若干大きめの値に設定するのが好ましい。
Basically, it is only necessary to feed the sequins to be fed out with a size (diameter) of 1 pitch. However, practically, in order to make the
次に、上述したシークイン送り装置1を使用してシークインの縫い付け動作を行う例について説明する。このシークイン送り装置1がセットされたミシンヘッドHを使用してシークイン縫い付けを行う場合、一連の縫い模様中において、2つのシークイン送りユニット20,21を切り替えて使用することにより、2種類の異なるシークインを自在に縫い付けることができる。本発明によれば、上述したように、各シークイン送りユニット20,21では、そのシークイン送りピッチを任意に設定・変更することができるので、この2種類の異なるシークインとは、形状や色が異なるばかりでなく、サイズ(直径)が異なっていてもよい。また、同じシークイン送り装置1であっても、シークイン縫いのデザインに応じて、その都度、任意のサイズ(直径)つまり送りピッチのシークインを縫い付けることができる。なお、以下説明する縫い制御は、図示しない制御装置(コンピュータ等)が、2種類シークイン組み合わせ刺繍に関する所望のシークイン模様の縫いパターンデータに基づき、以下説明するような手順からなる縫い制御を実現する縫いプログラムを実行することにより実現される。なお、これらの縫い制御手順をプログラムのフロー図の添付は省略しているが、そのようなフロー図は以下における縫い制御手順の説明から容易に実現可能である。
Next, an example of performing a sequin sewing operation using the above-described
まず、これから縫いを行おうとする2種類シークイン組み合わせ刺繍のデザインに応じて、形状や色やサイズの異なるシークイン連結体13をそれぞれ巻回収納した2つのリール14を用意し、これを、各シークイン送りユニット20,21に対応して、ベース3に並列にセットする。両リール14からシークイン連結体13を繰り出して、第1ローラ15、テンションローラ10、第2ローラ16、第3ローラ17、第4ローラ18の順に掛け渡した後に、各シークイン送りユニット20,21に案内する。図4において右側のリール14から繰り出したシークイン連結体13は右側の送りユニット21の支承板23へ、左側のリール14から繰り出したシークイン連結体13は左側の送りユニット20の支承板23へと導く。なお、このとき、各シークイン送りユニット20,21に対応するガイド部42(図9)も、シークイン連結体13の横幅に合わせて、交換する必要があれば交換する。それから、各シークイン送りユニット20、21において、セットしたシークイン連結体13のシークインのサイズに合わせて前述した各種の調整(「切断位置」調整、「送り量」調整など)を行う。この各種の調整は適当な順番で行えばよい。
First, according to the design of two kinds of sequin combination embroidery to be sewn, two
所定の調整・設定をすべて完了したら、ミシン運転をスタートする。ミシン運転がスタートすると、制御装置の制御に従って、少なくとも2種類のシークインを組み合わせて使用する所望のシークイン模様の縫いパターンデータに基づき、シークイン刺繍縫い動作が実行される。例えば、所望のシークイン模様の縫いパターンデータは、所望の縫い模様を実現するようにプログラムされた既存の刺繍縫いデータフォーマットからなる刺繍縫いデータ(刺繍枠を所望の縫い模様に応じてX−Y駆動するデータ等からなるもの)において、初期ステッチ及び任意の1又は複数のステッチの各々に対応して縫いに使用するシークインを選択(切り替え)するデータを含ませた構成からなる。まず、初期ステッチに対応してシークインを選択するデータに基づき、2つのシークイン送りユニット20,21のうちどちらを使用すべきかが指示される。例えば、第1のシークイン送りユニット20が指示されると、モータ63を駆動して図11に示すように第1のシークイン送りユニット20を縫い動作位置に位置決めする。この状態で、1縫い動作毎にモータ57を駆動して第1のシークイン送りユニット20の揺動アーム27を揺動させてシークイン連結体13を送り出す。送り出されたシークイン連結体13の先頭のシークインSが縫い針77によって刺繍枠80に張られた布地に縫い付けられ、同時に下動した針棒39の針抱き40によって可動刃36が下向きに駆動され、縫い付けられた先頭のシークインSがシークイン連結体13から切り離される。こうして、第1のシークイン送りユニット20から送り出されるシークインが縫い付けられることになる。
When all prescribed adjustments and settings have been completed, the sewing machine starts running. When the sewing machine operation starts, a sequin embroidery sewing operation is executed based on the sewing pattern data of a desired sequin pattern that uses a combination of at least two types of sequins in accordance with the control of the control device. For example, the sewing pattern data of a desired sequin pattern includes embroidery sewing data (an embroidery frame is driven in accordance with the desired sewing pattern in an XY manner) in an existing embroidery sewing data format programmed to realize the desired sewing pattern. The data includes data for selecting (switching) sequins used for sewing corresponding to each of the initial stitch and any one or a plurality of stitches. First, based on data for selecting a sequin corresponding to the initial stitch, it is instructed which of the two
シークイン縫いの進行に伴い、シークインを切り替えるステッチが到来すると、前記刺繍縫いデータに基づき、例えば第2のシークイン送りユニット21が指示される。すると、針棒39が上方にある間に、モータ63を駆動して図12に示すように第2のシークイン送りユニット21を縫い動作位置に位置決めする。これにより、モータ57の駆動は第2のシークイン送りユニット21の揺動アーム27に伝達されるようになり、以後は、第2のシークイン送りユニット21のシークイン連結体13が切断位置に送り出されるようになる。なお、針棒39の上下動1サイクルにおいて該針棒39が上方にある間に、シークイン切り替えのスライドとシークイン送り出しを行うために、シークイン切り替えのスライド動作を先に行い、次に、モータ57によるシークイン送り出しの1往復ストローク駆動を行う。こうして、今度は第2のシークイン送りユニット21から送り出されるシークインが縫い付けられるようになる。以後、縫いに使用するシークイン送りユニットを必要に応じて随時他方に切り替えることができる。
When a stitch for switching sequins comes along with the progress of sequin sewing, for example, the second
こうして、ミシン回転を止めることなく、また、針棒39をジャンプさせることなく、シークインを一方から他方に随時切り替えることができる。勿論、切り替え制御の仕方は、これに限られるものではなく、シークインを切り替えるスライド動作中は針棒39をジャンプさせるようにしてもよい。
In this way, sequin can be switched from one to the other at any time without stopping the sewing machine rotation and without causing the
なお、刺繍縫いデータにおいて、上記のようにシークインを切り替えるステッチに対応してのみシークイン選択(切り替え)データを含ませておく例に限らず、各ステッチ毎にシークイン選択(切り替え)データを含ませておいてもよい。 The embroidery sewing data is not limited to the example in which the sequin selection (switching) data is included only in correspondence with the stitch for switching sequins as described above, but the sequin selection (switching) data is included for each stitch. It may be left.
また、シークイン切り替え用のスライド制御は、上記例のように刺繍縫いデータに基づいて行うものに限らず、予め決められたシークイン切り替えパターンに基づき自動的に行うようにしてもよいし、あるいは操作者が操作パネル90を操作して手動で任意に随時行うようにしてもよい。予め決められたシークイン切り替えパターンとは、例えば、第1のユニット20のシークインを所定個数nだけ連続して縫った後、第2のユニット21のシークインを所定個数mだけ連続して縫う、というようなものであり、このパターンを繰り返すことで縫い付けるシークインを切り替えるものである。その場合、n及びmの値を操作者が操作パネル90を操作して手動で任意に設定・変更できるようにするとよい。また、複数のシークイン切り替えパターンを予め用意しておき、その中から操作者が操作パネル90を操作して任意のパターンを選択できるようにしてもよい。
Further, the slide control for sequin switching is not limited to the one based on the embroidery sewing data as in the above example, but may be automatically performed based on a predetermined sequin switching pattern, or the operator However, it may be performed manually at any time by operating the
なお、上記実施例では、対称構成からなる2つのシークイン送りユニット20、21を対向して設けたが、同一構成のシークイン送りユニット20、21を同じ向きで併設してもよい。その場合には、連係ピン26を固定している連係アーム25を、ユニット20,21のスライド時に伝達レバー54と干渉することなくすり抜け可能な形状に変更する構造とする。また、連係アーム25の形状/構造をそのように変更した場合は、2つのシークイン送りユニット20、21に限らず3個以上のシークイン送りユニットをスライド選択可能に並設することもでき、よって切り替え可能なシークインを3種類以上に増やすこともできる。
In addition, in the said Example, although the two
なお、上記実施例では、各シークイン送りユニット20、21における切断位置の調整を支持プレート22(シークイン送りユニット全体)の位置調整によって行う構成としたが、支承板23を支持プレート22に対して位置調整可能とし、支承板23のみの位置調整によって行うようにしてもよい。その場合、支承板23を直線変位させる機構は、前述の調整ネジ69のような回転直線変換機構あるいはリニアモータ等を適宜用いればよい。
In the above-described embodiment, the cutting position of each
〔第2実施例〕
次に、第2実施例に係るシークイン送り装置100について図16〜図20を参照して説明する。
図16は第2実施例に係るシークイン送り装置100の右側面図である。この第2実施例に係るシークイン送り装置100には、リール14に巻回したシークイン連結体13が供給し尽くされたことを検出するための検出装置101が設けてある。すなわち、検出装置101は、供給源(リール14)から各シークイン送りユニット20,21に供給されるシークイン連結体13の供給が途切れたか否かを検出するものである。なお、この検出装置101を配置する関係上、リール14から繰り出されたシークイン連結体13を案内する各ローラの配置が、第2実施例に係るシークイン送り装置100においては前述の第1実施例のシークイン送り装置1とは幾分異なるが、それ以外の構成に関しては両実施例は同じである。
[Second Embodiment]
Next, the
FIG. 16 is a right side view of the
図17〜図20は、検出装置101の構成例を拡大して示す図であり、図17は右側面図、図18は図17のA矢視図、図19は図17のB−B線断面図である。検出装置101の取付ブラケット102は、ベース3に取り付けられる取付部102aと、該取付部102aから直角に折れ曲がって形成された第1ベースプレート102bとからなる。図18に示すように、第1ベースプレート102bには下方縁に逆T字形の突片103が連設され、突片103の左右には、それぞれシークイン連結体13を案内する案内片103a、103bが延びている。取付ブラケット102には、その第1ベースプレート102bと略同形状の第2ベースプレート104が、スタッド105を介して第1ベースプレート102bと平行に取り付けられている。すなわち、この第2ベースプレート104には、第1ベースプレート102bの案内片103a、103bと同様の案内片104a、104bが設けられている。これにより、図19に示すように、上方から垂下した2列のシークイン連結体13を案内片103a、103b(104a、104b)の左右にてそれぞれ支持(案内)し、かつ、各列のシークイン連結体13を相前後する案内片103a、104a(103b、104b)により2点間に掛け渡す形で案内するようになっている。第1及び第2ベースプレート102b、104の間には、右レバー106、左レバー107が突片103に設けたピンによって回動自在に取り付けてある。両レバー106、107は、上下の(相前後する)案内片103a、104a(103b、104b)に掛け渡されたシークイン連結体13に当接可能なアーム106a、107aと、これらに延設された検出片(金属)106b、107bをそれぞれ備えており、両アーム106a、107aの自由端にはツマミ108がそれぞれ取り付けてある。
FIGS. 17 to 20 are enlarged views of configuration examples of the
各レバー106、107は、第1の位置と第2の位置との間で変位する変位部材に相当する。第1の位置とは、変位部材(レバー106、107)がシークイン連結体13に当接して止まっている位置であり、第2の位置とは、シークイン連結体13が途切れたことにより変位部材(レバー106、107)がシークイン連結体(13)に当接することなく該第1の位置を通り越した位置である。
図18は左右両側の案内片103a、103b(104a、104b)に2列のシークイン連結体13がそれぞれ掛け渡されている状態を示す。この状態では、それぞれのツマミ108の自重によって下方に回動した右レバー106、左レバー107の各アーム106a、107aがそれぞれのシークイン連結体13に上から当接しており、各レバー106、107は第1の位置に位置している。一方、案内片103a、103b(104a、104b)にシークイン連結体13が掛け渡されていないとき(つまり、シークイン連結体13が途切れたとき)には、図20に示す右レバー106のようにツマミ108の自重によって時計方向に回動し、下方に回動するアーム106aが案内片103a、104aの間を通り抜け、ツマミ108が鉛直方向を指向する同図に示すような姿勢となり、レバー106は第2の位置に位置する。
Each
FIG. 18 shows a state in which two rows of
第2ベースプレート104の上面には、検出片106b、107bの回動軌跡上に磁気センサ109が設けてあり、これと対向する永久磁石110が第1ベースプレート102bの下面に取り付けてある。図18に示すように、磁気センサ109と永久磁石110との間を検出片106b、107bが遮っていないときは、磁気センサ109がON状態となっているが、例えば図18の状態から図20に示すように右側のシークイン連結体13が無くなって右レバー106が時計方向に回動すると、つまり第1の位置から第2の位置に変化すると、その検出片106bが磁気センサ109と永久磁石110の間を横切ることで永久磁石110の磁気が一時的に遮断され、磁気センサ109がOFF状態となる。これにより、リール14から繰り出されていたシークイン連結体13が無くなったことが検出できる。
On the upper surface of the
更に、シークインの縫付け時における第2実施例に係る検出装置101の動作について説明する。まず、第1実施例の場合と同様に、形状やサイズの異なるシークイン連結体13を巻回収納した2つのリール14をベース3に並列にセットする。両リール14から繰り出したシークイン連結体13を、図16に示すように各ローラ、検出装置101に掛け渡した後に各シークイン送りユニット20、21へと案内する。検出装置101へは、その左右の案内片103a、104a,103b,104bにそれぞれシークイン連結体13をセットする。例えば、検出装置101へのシークイン連結体13のセットを右側について行う場合について説明する。右側にシークイン連結体13がセットされていないとき、右レバー106は図20に示すようにツマミ108が鉛直方向を指向する位置(第2の位置)にある。この第2の位置にある右レバー106のツマミ108を持って反時計方向に回動させ、該右レバー106のアーム106aが図18に示す位置(第1の位置)よりも上方に来るようにし、アーム106aと案内片103a、104aとの間に右側のシークイン連結体13を差し入れてセットする。これにより、右レバー106は、相前後する案内片103a、104aにより2点間に掛け渡されたシークイン連結体13の上面で受け止められてアーム106aが横向きになる図18に示す位置(第1の位置)に保持される。検出装置101の左側に対する左側のシークイン連結体13のセットも同様に行う。
Furthermore, the operation of the
このようにシークイン連結体13をセットしてシークインの縫付けを開始すると、シークイン連結体13がある間は、両レバー106、107は図18に示す第1の位置に保持され、磁気センサ109は永久磁石110の磁気を検出してON状態が続く。そして、シークインの縫付けの進行に伴ない、例えば右側のシークイン連結体13が供給し尽くされて右側の案内片103a,104aからシークイン連結体13が無くなったときには、右レバー106が図20に示す第2の位置まで動く。このときに、右レバー106の検出片106bが磁気センサ109と永久磁石110の間を通過することにより永久磁石110の磁気が一時的に遮断されて磁気センサ109が一時的にOFF状態となり、その後、ON状態に戻る。磁気センサ109の出力は図示しない制御装置に供給される。制御装置は、磁気センサ109の出力がOFF状態となったことを検出すると、シークイン連結体13が無くなったと判断して、ミシンを自動的に停止するとともに、適宜の可視的及び/又は可聴的手段により作業者に対してシークイン連結体13が無くなったことを報知する。
When the
ところで、上述した検出装置101では、レバー106又は107が第2の位置に保持されているときは、磁気センサ109はON状態となっているため、シークイン連結体13を片側のみにセットして一つのシークイン連結体13のみでシークインの縫付けを行う(シークインの色換えなし)ときに、シークイン連結体13がセットされていない側のレバー106、107を退避させるなど、シークイン連結体13がセットされていない側の状態が検出されないようにする必要がない。従って、1種類のシークイン縫いを行う場合に、余分な制御を行う必要がないので便利である。なお、このとき、シークイン連結体13がセットされていない側のレバー106又は107は、ツマミ108の自重のみによってツマミ108が鉛直方向を指向するように保持されているため、刺繍ミシンの振動が大きいとレバー106又は107が回動してしまい誤検出される恐れがある。これを回避するために、レバー106、107が第2の位置(ツマミ108が鉛直方向を指向する位置)にあるときに、振動によって揺動しないようにレバー106、107の動きを抑制する板バネ等の保持部材を設けてもよい。あるいは、通常はレバー106、107が第2の位置(ツマミ108が鉛直方向を指向する位置)に位置するように付勢するトーションバネ等の付勢部材を設けるようにしてもよい。この場合、付勢されたレバー106、107を第2の位置で止めるためのストッパを設けるとよい。
By the way, in the
なお、上記第2実施例では、検出装置101は、2列のシークイン連結体13のどちらか一方のシークイン連結体13が無い状態となったことを検出するだけであり、どちらのシークイン連結体13が無い状態となったのかまでは検出していない。どちらかのシークイン連結体13が無い状態となったことの検出に基づくミシンの自動停止又は作業者への報知によって、必要十分な機能を果たすことができるからである。しかし、これに限らず、シークイン連結体13の各列に対応して検出装置を設け、どちらのシークイン連結体13が無い状態となったのかを検出できるようにしてもよい。
In the second embodiment, the
なお、シークイン連結体13が無い状態となったことを検出するための検出装置(101)は、上記第1,第2実施例のように2列(又は複数列)のシークイン連結体13を併設してシークインの選択が行えるタイプのシークイン送り装置1に限らず、1列のシークイン連結体のみの送り動作を行う従来タイプのシークイン送り装置においても適用することができる。その場合は、図17〜図20に示された検出装置101の構成をそのまま使用して、左右いずれか一方の案内片103a、104a(又は103b,104b)のみでシークイン連結体13を案内するようにすればよい。あるいは、図17〜図20に示された検出装置101の構成を変形して、左右いずれか一方の案内片103a、104a(又は103b,104b)と、それに対応するレバー106(又は107)を設けるようにすればよい。
なお、検出装置101としては、磁気式センサからなるものに限らず、光学式センサあるいは機械式センサなど、どのような検出手段を用いてもよい。
Note that the detection device (101) for detecting that the
The
〔その他の工夫又は変更例〕
2つのリール14を並列にセットする個所にはリール14が余分に回転しないようにリール14を側方から押え付けるバネ部材が設けてある。このため、並列した2つのリール14には一緒に回転する作用が働き、縫付けを行っている方のリール14が回転すると、縫付けを行っていない方のリール14も一緒に回転してシークイン連結体13が弛んで縫付けに悪影響を及ぼすことがある。これを回避するために2つのリール14が一緒に回転することを防止する対策を施すことが望ましい。この対策としては、リール14を支持するリール取付軸にキー溝を形成し、このキー溝に嵌まるキーを内周縁に形成したワッシャーを2つのリール14の間に設けるとよい。他にも、リール取付軸の一部を平面(略D字状)とし、これと同形状の抜き孔を設けたワッシャーを2つのリール14の間に設けるようにしてもよい。このようにすれば、2つのリール14が一緒に回転することはなく、しかも、バネ部材による側方からの押え付けは2つのリール14の双方に作用することとなる。
[Other ideas or changes]
A spring member for pressing the
取付ベース4を下降位置と退避位置との間の中間位置にも停止できるようにしてもよい。そして、例えばシークインの縫着からシークイン針棒による刺繍へと切り換えるときに、従来であれば作業時間を短縮するために下降位置のままとしていたが、ミシンを停止することなく取付ベース4を下降位置から中間位置に上昇させるようにする。これにより、可動刃36が針抱き40により無駄に叩かれることによって、可動刃が破損し易くなったり、ミシン騒音が大きくなるという不具合を防止できることとなる。そして、その昇降に要する時間は短くてよく、ミシンも停止させないために下降位置のまま行う場合と比べて作業時間のロスはない。また、このときに針棒をジャンプ状態としてもよく、この場合であっても作業時間のロスは僅かなものとなる。なお、中間位置としては、可動刃36が針抱き40に叩かれない位置であれば何処であってもよい。なお、このように、中間位置にも停止できるようにした場合には、ミシンを停止したときに取付ベース4を中間位置から退避位置まで退避させるようにするとよい。更に、取付ベース4の昇降は、糸切りを行うときや糸切れを検出したときなど各種の所定状態のときに下降位置のままとするのか、中間位置または退避位置に上昇させるのかを作業者が個別に設定できるようにしてもよい。
The mounting
図1に示すようにシークイン送り装置1を針棒ケース2の左端に装着する場合は、シークイン送り装置1における2つのシークイン送りユニット20、21のうち右側のシークイン送りユニット21を縫い動作位置に設定する状態を基準位置とし、シークイン縫いを行わないときは基準位置に位置させる(右側のシークイン送りユニット21を縫い動作位置に設定する)ようにするとよい。これにより、針棒ケース2においてシークイン針棒の右隣に位置する針棒への糸通しなどの作業に際して、シークイン送り装置1が邪魔にならず、糸通しを楽に行えることとなる。なお、シークイン送り装置1を針棒ケース2の右端に装着する場合は、上記とは反対に、左側のシークイン送りユニット20が縫い動作位置にある状態を基準位置とするのがよい。
As shown in FIG. 1, when the
各シークイン送り装置1毎に、シークイン連結体13を送り出す動作を指示するための送り出しスイッチ、送り出す動作を行うべきシークイン送りユニットを左右いずれかのユニット20又は21に切り換えることを指示するための切り換えスイッチ、あるいはシークイン送り装置1を昇降させることを指示するための昇降スイッチなどを設け、所望のスイッチを作業者が手動操作することで所望の動作を手動指示できるようにしてもよい。
For each
ミシン運転中は刺繍縫いデータを数ステッチ分先読みして、シークインの切り換えをその縫い付けが行われる前のステッチで行うようにしてもよい。具体的には、刺繍縫いデータの先読みによってシークインを切り換えて縫い付けるステッチを識別したら、その前のステッチにてシークインの切り換えが可能かを判別する。その前のステッチがシークインを送り出さないステッチであればシークインの切り換えを可能として、その前のステッチにてシークインの切り換えを行うようにする。前のステッチがシークインを送り出すステッチであればシークインの切り換えを不可能として、ステッチ間に針棒をジャンプさせるジャンプステッチデータを挿入して、針棒をジャンプさせている間にシークインの切り換えを行うようにする。 During sewing operation, the embroidery sewing data may be read ahead for several stitches and sequin switching may be performed at the stitch before the sewing is performed. Specifically, when a stitch to be sewn is identified by switching the sequin by prefetching the embroidery sewing data, it is determined whether the sequin can be switched with the previous stitch. If the previous stitch is a stitch that does not send out sequins, it is possible to switch the sequins, and the sequins are switched at the previous stitch. If the previous stitch is a stitch that sends out sequins, it is impossible to switch sequins, and jump stitch data that jumps the needle bar between stitches is inserted, and sequin switching is performed while the needle bar is jumping. To.
このときのシークインの切り換えを図21、図22に示すシークイン模様を縫い付ける場合を例に説明する。図21、図22に示すシークイン模様は、サイズの異なるシークインが交互に縫い付けられたもので、大きいサイズのシークインAはシークイン送りユニット21にて、小さいサイズのシークインBはシークイン送りユニット20にて縫い付けるものとする。両図に示す、P1は第1針目の縫い目、P2は第2針目の縫い目であり、以降P3、P4、...と続く。これより明らかなように、図21に示すシークイン模様では各シークインA,Bの間にシークインを縫い付けないステッチがそれぞれ設けられており、図22では1ステッチ毎に連続して異なるシークインA,Bを縫い付ける形態となっている。
Switching of sequins at this time will be described by taking as an example a case where the sequin patterns shown in FIGS. 21 and 22 are sewn. The sequin patterns shown in FIGS. 21 and 22 are obtained by alternately sewing sequins of different sizes. A large sequin A is a
図21に示すシークイン模様を縫い付ける場合についての制御装置(コンピュータ)による処理手順について説明すると、まず、最初に縫い付けられるシークインAに対応してシークイン送りユニット21を縫い動作位置に位置決めし、その後に、シークインを縫い付けない第1針目の縫い目P1を形成する。次に、シークイン送りユニット21にてシークインAを送り出し、第2針目の縫い目P2によってシークインAを縫い付ける。刺繍縫いデータの先読みによって第4針目のシークインBの縫い付けを識別し、その前の第3針目でのシークインの切り換えが可能かを判断する。第3針目はシークインを送り出さないステッチで、シークインの切り換えが可能であるため、第3針目にてシークインの切り換えを行うように決定する。これに基づき、次にシークインBに対応してシークイン送りユニット20を縫い動作位置に位置決めし、その後にシークインを縫い付けない第3針目の縫い目P3を形成する。このとき、縫い動作位置に位置決めすべきシークイン送りユニットの切り換えは、第2針目と第3針目の間の針棒が上方にあるときに行う。次に、既に縫い動作位置に位置決めされているシークイン送りユニット20にてシークインBを送り出し、第4針目の縫い目P4によってシークインBを縫い付ける。次に、上記と同様にシークインAに対応するシークイン送りユニット21が縫い動作位置に位置決めされた後に、シークインを縫い付けない第5針目の縫い目P5が形成される。以降は上記の動作が同様に繰り返されて図21に示すようなシークイン模様が縫い付けられる。
The processing procedure by the control device (computer) for sewing the sequin pattern shown in FIG. 21 will be described. First, the
図22に示すシークイン模様を縫い付ける場合についての制御装置(コンピュータ)による処理手順について説明すると、まず、最初に縫い付けられるシークインAに対応してシークイン送りユニット21を縫い動作位置に位置決めし、その後に第1針目の縫い目P1を形成する。次に、シークイン送りユニット21にてシークインAを送り出し、第2針目の縫い目P2によってシークインAを縫い付ける。刺繍データの先読みによって第3針目のシークインBの縫い付けが識別され、その前の第2針目でのシークインの切り換えが可能か否かを判断する。第2針目はシークインAを縫い付けるステッチであるからシークインの切り換えは不可能であると判定され、第2針目と第3針目の間に針棒をジャンプさせるジャンプステッチデータが挿入される。これにより、次はジャンプステッチにて針棒がジャンプされ、シークインBに対応してシークイン送りユニット20が縫い動作位置に位置決めされる。次に、シークイン送りユニット20にてシークインBが送り出され、第3針目の縫い目P3によってシークインBを縫い付ける。次に、上記と同様にジャンプステッチデータを挿入し、針棒をジャンプするとともに、シークインAに対応するシークイン送りユニット21を縫い動作位置に位置決めする。次に、シークイン送りユニット21にてシークインAを送り出し、第4針目の縫い目P4によってシークインAを縫い付ける。以降は上記の動作が繰り返されて図22に示すシークイン模様が縫い付けられる。このように、シークインの切り換えをその縫い付けが行われる前のステッチで行うようにすることによって、シークインの切り換えと送り出しを別のステッチにて行わせるようにしてもよい。
The processing procedure by the control device (computer) for sewing the sequin pattern shown in FIG. 22 will be described. First, the
なお、図21に示すシークイン模様のように、シークインを縫い付けるステッチの前にシークインの送り出しを行わないステッチがある場合でも、刺繍枠80が手前側に移動するときにはシークインの切り換えは不可能と判断するようにしてもよい。これは、刺繍枠80が手前側に移動すると先のステッチ位置はシークイン送りユニット20、21の下方に入り込んで、図23に示すように上糸Tがシークイン送りユニット20、21の先端(可動刃36)に接することとなり、このときに例えばシークインのサイズに合わせて図15に示すように各シークイン送りユニット20、21の前後位置が異なる場合で、シークイン送りユニット21からシークイン送りユニット20へ切り換えると、シークイン送りユニット20のカッター部(36,23b)に上糸Tが入り込むことがあるためである。カッター部(36,23b)に上糸Tが入り込むと、縫いに影響するだけでなく、シークインの縫い付け時には可動刃36によって上糸Tが切断されてしまう。このように、刺繍枠80が手前側に移動するときのシークインの切り換えを不可能としたときには、更にその前のステッチにてシークインの切り換えが可能かを判別するようにし、そのステッチがシークインを送り出さないステッチで刺繍枠80が手前側に移動しないときには、そのステッチでシークインの切り換えを行うようにする。一方、そのステッチにおいてもシークインの切り換えが不可能なときには、ジャンプステッチデータを挿入するようにする。なお、上糸Tがカッター部(36,23b)に入り込むのを確実に防止するために、シークイン送りユニット20、21に上糸Tがカッター部(36,23b)に入り込まないように該上糸Tを案内するガイド部材を設けるようにしてもよい。また、刺繍縫いデータの先読みによって、シークインを切り換えるステッチの数ステッチ手前からミシンの縫いスピードを下げるようにし、あるステッチの間シークインの切り換えが行われないときは縫いスピードを戻すようにしてもよい。
Even when there is a stitch that does not send out sequins before the stitch that sews sequins, as in the sequin pattern shown in FIG. 21, it is determined that sequin switching is impossible when the
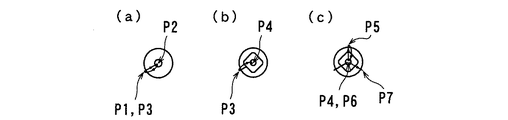
次に、本発明を利用して新たなパターンからなるシークイン模様を作成する例について説明する。本発明に係るシークイン送り装置1を使用して、図24に示すように異なるタイプの2つのシークインC、Dを重ねて縫い付けることにより、従来にない新たなパターンからなるシークイン模様を作成することができる。この場合の制御装置(コンピュータ)による縫い処理手順の一例を図25に基づいて説明する。まず、シークインCの縫い付けを行うために使用するシークイン送りユニット(20又は21)を縫い動作位置に位置決めし、それから図25(a)に示す第1針目の縫い目P1を形成する。次にシークインCを送り出して第2針目の縫い目P2によってシークインCを縫い付ける。次に、他方のシークイン送りユニット(21又は20)を縫い動作位置に位置決めし、それから第3針目の縫い目P3を形成する。次に、図25(b)に示すようにシークインDを送り出して第4針目の縫い目P4によってシークインDを縫い付ける。その後はシークインC、Dを確実に縫い止めるために、図25(c)に示すように第5、6、7針目の縫い目P5、P6、P7を順次形成する。この間に次のシークインCの縫い付けを行うシークイン送りユニット(20又は21)を縫い動作位置に位置決めし、第8針目にて次のシークインCを縫い付ける。以降は上記の第3針目〜第8針目の動作が同様に繰り返されて図24に示すようなシークイン模様が縫い付けられる。なお、上記縫い付けにおいて複数の縫い目が重複する箇所があるが、その場合同じ位置に縫い目を形成するようにしてもよいし、僅かにずらした位置に縫い目を形成するようにしてもよい。
Next, an example of creating a sequin pattern composed of a new pattern using the present invention will be described. Using the
〔シークイン送り装置の別の例〕
シークイン送り装置の別の実施例を図26に示す。図26はシークイン送り装置120を背面側から見た分解斜視図であり、シークイン送り装置120を構成する送り駆動機構121、シークイン選択機構122、左側のシークイン送りユニット123、右側のシークイン送りユニット124の部分が拡大して示されている。このシークイン送り装置120では、シークイン送りユニットにおける切断位置(縫い針77に対する位置)を可変調整するための調整機構が各シークイン送りユニット123、124に備えてあり、シークインのサイズに応じて調整した切断位置がシークイン送りユニット123、124をシークイン送り装置120から取り外しても維持されるようになっている。また、シークイン送りユニット123、124のシークイン送り装置120への取り付けは、所定位置に固定的に位置決めできる構成となっている。
[Another example of sequin feeder]
Another embodiment of the sequin feeder is shown in FIG. FIG. 26 is an exploded perspective view of the
このシークイン送りユニット123、124及びその取付部の構成に関して説明する。シークイン選択機構122はシークイン送りユニット123、124を取り付けるためのベース部材125を左右両側に備えている。シークイン送りユニット123、124は取付ブラケット126を備えており、取付ブラケット126には取付用の溝126aと孔126bが形成してある。シークイン送りユニット123、124は2つの段付きネジ132にてベース部材125に対して着脱自在に固定できるようになっており、取付ブラケット126の溝126aの高さ及び孔126bの径は、段付きネジ132の軸部132aがガタなく入り込む寸法となっている。これにより、取付ブラケット126はベース部材125に対して常に同じ位置に位置決めされることとなる。
The configuration of the
取付ブラケット126は支持プレート127に2つの固定ネジ128にて固定してある。支持プレート127の固定ネジ128の取付部は、固定ネジ128のネジ部を通す通し孔と固定ネジ128の頭部が入り込む拡径部との段差状に形成してあり、これらが前後に延びる長孔となっている。取付ブラケット126には前後に延びる案内孔126cが形成してあり、案内孔126cには支持プレート127に固定された案内ピン129が嵌入するようになっている。取付ブラケット126の直角に曲成された支持部126dには調整ネジ130が回転自在であるがネジ軸方向には動かないように支持してあり、調整ネジ130の先端部は支持プレート127に固定された受け部材131のネジ孔に螺合してある。従って、調整ネジ130の回転に応じて、該ネジ130は直線変位せず、ネジ孔の形成された受け部材131及び支持プレート127が直線変位する。これにより、2つの固定ネジ128を緩め、調整ネジ130を右回し又は左回しすると、支持プレート127が取付ブラケット126に対して前又は後に直線的に動かされて、その前後位置が調整されることとなる。なお、シークイン送り装置120の上記説明した以外の構成は、各部品の形状や配置が若干異なるものの機能的には第1実施例のシークイン送り装置1と同様であるため説明は省略する。
The mounting
このシークイン送り装置120において、縫い付けるシークインのサイズに応じて調整を行うときには、調整を行うシークイン送りユニット123、124をシークイン送り装置120から取り外してシークイン送り量の調整(揺動レバー、ロックレバーの位置調整)を行う。また、ガイド部の交換が必要であれば交換する。その後、シークイン送りユニット123、124をシークイン送り装置120に取り付けて、シークイン送りユニット123、124における切断位置(縫い針77に対する位置)を、上記したように調整ネジ130を右回し又は左回しして支持プレート127を前後に動かして調整する。あとは、必要に応じて送り駆動を行うモータの回転範囲をシークインの1ピッチ分の送り量に対応する値にデータ設定する。このように、シークイン送りユニット123、124をシークイン送り装置120から取り外してシークイン送り量の調整を行うことによって、その調整を容易に行うことができる。
In this
また、取付ブラケット126はベース部材125に対して同じ位置に固定されるため、シークインのサイズに応じて支持プレート127の位置を調整した後にシークイン送りユニット123、124を脱着しても、シークイン送りユニット123、124における切断位置は変わらない。このことから、各シークインのサイズに応じた支持プレート127の調整位置を示した目盛などを設け、切断位置の調整に関してもシークイン送りユニット123、124をシークイン送り装置120から取り外した状態で調整できるようにすれば、その調整が容易に行えることとなる。更には、各シークインのサイズに調整されたシークイン送りユニットをそれぞれ用意しておいて、使用するシークインのサイズに応じて各種の調整を行うのではなく、そのサイズに調整されたシークイン送りユニットに交換するだけという使い方が可能となる。
Further, since the mounting
なお、上記各実施例ではシークイン選択機構をスライドさせるための構造は、2本のロッドとロッドに摺動可能に支持された部材とを用いた構成としているが、これに限定されるものではなく、例えばリニアレールを用いるなど他の任意のスライド構造を採用してよい。 In each of the above-described embodiments, the structure for sliding the sequin selection mechanism is configured using two rods and a member slidably supported by the rods, but is not limited thereto. Any other slide structure such as a linear rail may be employed.
1,100,120 シークイン送り装置
2 針棒ケース
3 固定ベース
4 取付ベース
13 シークイン連結体
14 リール(シークイン収納部)
19 シークイン送り機構
20,21 シークイン送りユニット
22 支持プレート
23 支承板
23b 固定刃
29 送りレバー
33 ロックレバー
36 可動刃
39 針棒
40 針抱き
69 切断位置を調整するためのネジ
70 針板
77 縫い針
80 刺繍枠
90 操作パネル
H ミシンヘッド
1,100,120
19
Claims (17)
前記2つのシークイン送りユニットのうち1つのユニットを選択して所定の縫い動作位置に位置決めするシークイン選択機構と、
前記所定の縫い動作位置に位置決めされた前記1つのシークイン送りユニットの前記シークイン送り機構に係合して、縫い動作に応じて該係合したシークイン送り機構を駆動し、前記シークイン連結体を所定の切断位置に向けて送り出す駆動機構と
を備え、
前記各シークイン送りユニットは、縫い針の位置に対するそれぞれの前記カッター部の位置を他のユニットとは独立に調整する調整機構を含み、
縫い動作に応じて前記カッター部を駆動し、前記所定の切断位置に送り出された前記シークイン連結体からシークインを切断し、
前記2つのシークイン送りユニットは一体的に横方向にスライド可能に並んで配置されており、
前記シークイン選択機構は、前記2つのシークイン送りユニットを一体的にスライドすることで、そのうち1つのユニットを所定の縫い動作位置に位置決めし、
前記2つのシークイン送りユニットの前記各シークイン送り機構は、連係部材をそれぞれ有していて、該連係部材に対して与えられる往復運動に応じて前記シークイン連結体を送り出すように構成されており、前記両シークイン送り機構の前記連係部材はギャップを開けて前記スライドの方向に横並びに配置されており、
前記駆動機構は、一方の前記連係部材に係合する係合部を有し、該係合部は、前記シークイン選択機構によって前記1つのユニットが前記所定の縫い動作位置に位置決めされたとき、該係合部が該所定の縫い動作位置に位置決めされた該1つのユニットの前記連係部材に係合するように配置されており、該係合部を介して該1つのユニットの前記連係部材に対して往復運動を与えることにより、前記対応するシークイン連結体を前記所定の切断位置に向けて送り出すことを特徴とするシークイン送り装置。 A sequin feed mechanism for feeding toward the continuous sequin strip at a predetermined cutting position, said predetermined cutting position to arranged a sequin cutter portion for cutting each including two sequin feed units,
A sequin selection mechanism for positioning in a predetermined sewing operation position by selecting one of the units of the previous SL two sequin feed units,
The sequin feed mechanism is engaged with the sequin feed mechanism of the one sequin feed unit positioned at the predetermined sewing operation position, the sequin feed mechanism is driven according to the sewing operation, and the sequin coupling body is moved to a predetermined position. A drive mechanism for sending out toward the cutting position,
Each sequin feed unit includes an adjustment mechanism that adjusts the position of the cutter unit with respect to the position of the sewing needle independently of the other units,
Driving the cutter unit according to a sewing operation, cutting sequins from the sequin coupling body fed to the predetermined cutting position ,
The two sequin feed units are arranged side by side so as to be slidable in the horizontal direction.
The sequin selection mechanism slides the two sequin feed units integrally to position one unit at a predetermined sewing operation position,
Each of the sequin feed mechanisms of the two sequin feed units has a linking member, and is configured to send out the sequin linked body according to a reciprocating motion given to the linking member, The linkage members of both sequin feed mechanisms are arranged side by side in the direction of the slide with a gap therebetween,
The drive mechanism has an engagement portion that engages with one of the linkage members, and the engagement portion is positioned when the one unit is positioned at the predetermined sewing operation position by the sequin selection mechanism. An engagement portion is arranged to engage with the linkage member of the one unit positioned at the predetermined sewing operation position, and the engagement portion is connected to the linkage member of the one unit via the engagement portion. By applying reciprocating motion, the corresponding sequin connection body is sent out toward the predetermined cutting position .
前記調整機構は、前記支承板を直線変位させることで前記カッター部による前記切断位置を調整することを特徴とする請求項1乃至3のいずれかに記載のシークイン送り装置。 Each sequin feed unit includes a support plate that supports a fed sequin coupling body, and the cutter portion is provided at the tip of the support plate,
The sequin feed device according to any one of claims 1 to 3, wherein the adjustment mechanism adjusts the cutting position by the cutter portion by linearly displacing the support plate.
前記係合部と、
縫い動作に連動して駆動されるモータと、
前記モータの動きを前記係合部に伝達するリンク機構と
を含み、前記モータの動きに応じて、前記リンク機構及び前記係合部が動き、該係合部に係合する前記連係部材を介して、前記所定の縫い動作位置に位置決めされた前記1つのシークイン送りユニットの前記シークイン送り機構が動かされ、該シークイン送り機構の動きにより前記シークイン連結体を所定の切断位置に向けて送り出すことを特徴とする請求項1乃至11のいずれかに記載のシークイン送り装置。 The drive mechanism is
And before Symbol engaging portion,
A motor driven in conjunction with the sewing operation;
And a link mechanism for transmitting the motion of the motor to the engagement portion, in response to movement of said motor, said linkage and said engagement portion moves, via the linkage member for engaging the engagement portion The sequin feed mechanism of the one sequin feed unit positioned at the predetermined sewing operation position is moved, and the sequin coupling body is fed toward the predetermined cutting position by the movement of the sequin feed mechanism. The sequin feeder according to any one of claims 1 to 11 .
前記2種類のシークインを組み合わせて使用する所望のシークイン模様の縫いパターンデータに基づき、縫いに使用するシークインを切り換えるべき縫い位置で前記シークイン選択機構を制御して前記2つのシークイン送りユニットのいずれか1つを選択し、該選択されたシークイン送りユニットを使用してシークイン縫いが行われるよう制御する制御装置、
を更に備えたことを特徴とする請求項16に記載のミシン。 The front SL two sequin feed units, two different sequin strip is adapted to be supplied from a source,
Any desired based on the sewing pattern data sequin pattern, two previous SL controls the sequin selection mechanism in the sewing position to switch the sequin to be used for sewing the sequin feed units are used in combination the two sequin A control device for selecting one and controlling sequin sewing using the selected sequin feed unit;
The sewing machine according to claim 16 , further comprising:
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007244083A JP5091601B2 (en) | 2006-10-13 | 2007-09-20 | Sequin feeder and sewing machine capable of sequin sewing |
| CN2007101545547A CN101161900B (en) | 2006-10-13 | 2007-09-25 | Sequin feeder apparatus and sewing machine capable of sewing sequins |
| DE102007048344A DE102007048344A1 (en) | 2006-10-13 | 2007-10-09 | Sequin conveyor and sewing machine for sewing sequins |
| US11/870,703 US20080087206A1 (en) | 2006-10-13 | 2007-10-11 | Sequin feeder apparatus and sewing machine capable of sewing sequins |
| KR1020070103105A KR100925588B1 (en) | 2006-10-13 | 2007-10-12 | Sequin feeder apparatus and sewing machine capable of sewing sequins |
| TR2007/07023A TR200707023A2 (en) | 2006-10-13 | 2007-10-15 | Sewing machine with sequin feeding apparatus and sequin sewing capability. |
| GR20080100114A GR20080100114A (en) | 2006-10-13 | 2008-02-22 | Sequin feeder apparatus and sewing machine capable of sewing sequins. |
| BRPI0801112-5A BRPI0801112A2 (en) | 2006-10-13 | 2008-03-18 | sequin feeding machine and sewing machine |
| ITMI20080577 ITMI20080577A1 (en) | 2007-09-20 | 2008-04-03 | LUSTRINI FEEDER DEVICE AND SEWING MACHINE ABLE TO SEW LUSTRINI |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006280396 | 2006-10-13 | ||
| JP2006280396 | 2006-10-13 | ||
| JP2007244083A JP5091601B2 (en) | 2006-10-13 | 2007-09-20 | Sequin feeder and sewing machine capable of sequin sewing |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008114049A JP2008114049A (en) | 2008-05-22 |
| JP2008114049A5 JP2008114049A5 (en) | 2010-10-14 |
| JP5091601B2 true JP5091601B2 (en) | 2012-12-05 |
Family
ID=39277842
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007244083A Expired - Fee Related JP5091601B2 (en) | 2006-10-13 | 2007-09-20 | Sequin feeder and sewing machine capable of sequin sewing |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20080087206A1 (en) |
| JP (1) | JP5091601B2 (en) |
| KR (1) | KR100925588B1 (en) |
| CN (1) | CN101161900B (en) |
| BR (1) | BRPI0801112A2 (en) |
| DE (1) | DE102007048344A1 (en) |
| GR (1) | GR20080100114A (en) |
| TR (1) | TR200707023A2 (en) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100973558B1 (en) * | 2007-08-08 | 2010-08-03 | 썬스타 특수정밀 주식회사 | A apparatus of supplying sequin embroidery machine |
| JP5184992B2 (en) * | 2008-06-26 | 2013-04-17 | 株式会社バルダン | Sequin feeder |
| KR101049154B1 (en) * | 2008-08-07 | 2011-07-14 | 썬스타 특수정밀 주식회사 | Sequin Reel Fixture in Sequin Sewing Machine |
| CH700377A1 (en) * | 2009-02-11 | 2010-08-13 | Bernina Int Ag | Holding device for a tool for machining a textile or non-textile fabric in a sewing machine. |
| US20100207945A1 (en) * | 2009-02-14 | 2010-08-19 | Kirsch Jeremy A | Template for creating sequin-based designs & methods of use thereof |
| CH700560B1 (en) * | 2009-03-10 | 2013-09-13 | Laesser Ag | Device for embroidery, quilting and small embroidery machines for reserving to be embroidered items. |
| JP2011160918A (en) * | 2010-02-08 | 2011-08-25 | Tokai Ind Sewing Mach Co Ltd | Sequin feeder apparatus |
| CN102560925B (en) * | 2010-12-15 | 2014-03-26 | 北京大豪科技股份有限公司 | Control method for embroidering system |
| US9014837B2 (en) * | 2011-08-26 | 2015-04-21 | Ioannis Doukakis | Attachment for embroidery and sewing machines for creating crystal/rhinestone patterns and motifs, and software functions to control the attachment |
| JP2014083061A (en) * | 2012-10-19 | 2014-05-12 | Brother Ind Ltd | Sewing machine, embroidery data processing device, and embroidery data processing program |
| CN102978847B (en) * | 2012-12-20 | 2014-12-03 | 温州欧罗华实业有限公司 | Multi-sequin embroidering device and embroidery machine comprising multi-sequin embroidering device |
| JP5997089B2 (en) * | 2013-03-29 | 2016-09-28 | 株式会社バルダン | Sequin feeder |
| US9074309B1 (en) * | 2014-02-18 | 2015-07-07 | Abm International, Inc. | Method, apparatus and computer-readable medium for sequin attachment |
| CN105795568B (en) * | 2016-05-09 | 2017-07-28 | 广东溢达纺织有限公司 | Preceding width automatic processing system and preceding width automatic processing method |
| US10619296B2 (en) | 2017-01-06 | 2020-04-14 | Under Armour, Inc. | Articles with embroidered sequins and methods of making |
| JP7079918B2 (en) * | 2017-08-25 | 2022-06-03 | 株式会社ジャノメ | Quick-view panel device for sewing machines |
| CN111575933B (en) * | 2020-05-20 | 2023-08-15 | 浙江信胜科技股份有限公司 | Sheet feeding driving assembly convenient for color changing and sheet ironing machine |
| CN113445224A (en) * | 2021-07-07 | 2021-09-28 | 温州欧罗华实业有限公司 | Single-color bead arranging mechanism and embroidery machine with same |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2645193A (en) * | 1950-01-20 | 1953-07-14 | Peerless Sewing Machine Corp | Sewing machine |
| US3329113A (en) * | 1964-09-08 | 1967-07-04 | Glamorise Foundation Inc | Stripping cutters for sewing machines |
| US3390650A (en) * | 1965-10-27 | 1968-07-02 | Arnold G. Ochsner | Decorating attachment for embroidery machine |
| JPS61284287A (en) * | 1985-06-11 | 1986-12-15 | 東海工業ミシン株式会社 | Apparatus and method for change-over stitching of plural strip like spun webs in sewing machine |
| US4848253A (en) * | 1987-08-21 | 1989-07-18 | Tokai Industrial Sewing Machine Co., Ltd. | Embroidery machine for sewing spangles on fabrics |
| US5481993A (en) * | 1991-06-24 | 1996-01-09 | Kurihara; Akira | Method and apparatus for embroidering beads |
| US5562057A (en) * | 1992-05-11 | 1996-10-08 | Lenson; Harry | Dish-shaped sequin application apparatus and method for shuttle embroidery machine |
| DE19538084A1 (en) * | 1995-10-13 | 1997-04-17 | Zsk Stickmasch Gmbh | Sequin feeder for embroidery and / or sewing machines |
| JP2001198369A (en) * | 2000-01-20 | 2001-07-24 | Juki Corp | Binding machine |
| EP1209272B1 (en) * | 2000-11-17 | 2003-05-02 | Franz Lässer AG | Spangle feeding head |
| JP3744846B2 (en) * | 2001-12-04 | 2006-02-15 | ブラザー工業株式会社 | Tape detection mechanism of tape transfer device |
| JP3861048B2 (en) * | 2002-11-21 | 2006-12-20 | 東海工業ミシン株式会社 | Sequin feeder |
| JP4239192B2 (en) * | 2002-12-24 | 2009-03-18 | ヤマトミシン製造株式会社 | Apparatus and method for controlling the feeding size of a strip |
| JP2005052571A (en) * | 2003-08-07 | 2005-03-03 | Tokai Ind Sewing Mach Co Ltd | Sequin sewing device |
| KR100512455B1 (en) * | 2003-11-19 | 2005-09-06 | 김충식 | A Dobule supplying device of spangle |
| JP4482358B2 (en) * | 2003-12-22 | 2010-06-16 | 株式会社バルダン | Sequin feeder |
| KR100614630B1 (en) * | 2004-12-16 | 2006-08-21 | 김충식 | Spangle supply device of embroidery machine |
| JP4913373B2 (en) * | 2005-01-07 | 2012-04-11 | Juki株式会社 | Sewing needle drive mechanism |
| TWI364469B (en) * | 2005-09-14 | 2012-05-21 | Lasser Ag | Embroidery machine |
| JP2007151598A (en) * | 2005-11-30 | 2007-06-21 | Tokai Ind Sewing Mach Co Ltd | Sewing machine capable of sequin sewing |
-
2007
- 2007-09-20 JP JP2007244083A patent/JP5091601B2/en not_active Expired - Fee Related
- 2007-09-25 CN CN2007101545547A patent/CN101161900B/en not_active Expired - Fee Related
- 2007-10-09 DE DE102007048344A patent/DE102007048344A1/en not_active Withdrawn
- 2007-10-11 US US11/870,703 patent/US20080087206A1/en not_active Abandoned
- 2007-10-12 KR KR1020070103105A patent/KR100925588B1/en not_active IP Right Cessation
- 2007-10-15 TR TR2007/07023A patent/TR200707023A2/en unknown
-
2008
- 2008-02-22 GR GR20080100114A patent/GR20080100114A/en not_active IP Right Cessation
- 2008-03-18 BR BRPI0801112-5A patent/BRPI0801112A2/en not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| KR20080033885A (en) | 2008-04-17 |
| BRPI0801112A2 (en) | 2009-01-06 |
| DE102007048344A1 (en) | 2008-05-15 |
| CN101161900B (en) | 2012-03-07 |
| TR200707023A2 (en) | 2007-12-24 |
| CN101161900A (en) | 2008-04-16 |
| GR20080100114A (en) | 2008-09-04 |
| JP2008114049A (en) | 2008-05-22 |
| US20080087206A1 (en) | 2008-04-17 |
| KR100925588B1 (en) | 2009-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5091601B2 (en) | Sequin feeder and sewing machine capable of sequin sewing | |
| US7966956B2 (en) | Multi-head embroidery sewing machine | |
| JP4492385B2 (en) | Eyelet hole sewing machine | |
| EP1568810A1 (en) | Sequin feeder | |
| US8256362B2 (en) | Embroidery sewing machine and control method therefor | |
| JP2008114049A5 (en) | ||
| JP2005052571A (en) | Sequin sewing device | |
| JP2013034812A (en) | Double chain stitch sewing machine with device for preventing raveling of seam | |
| JP2009207639A (en) | Sequin tape supplying device and multi-head embroidery machine | |
| US20130025517A1 (en) | Multi-needle sewing machine | |
| JP2007068829A (en) | Cutting device in sewing machine | |
| US20130152838A1 (en) | Sewing Machine | |
| EP1818438A1 (en) | Chain-stitch sewing machine | |
| JP2019072466A (en) | sewing machine | |
| JP3156574B2 (en) | sewing machine | |
| JP2007029433A (en) | Hole sewing machine | |
| JP2001137584A (en) | Buttonhole sewing machine | |
| CN1523156B (en) | Sewing machine | |
| GB2109021A (en) | Cycle sewing machine | |
| JP2009207641A (en) | Sequin tape supplying device | |
| JP4482358B2 (en) | Sequin feeder | |
| JP2008029591A (en) | Sewing machine | |
| US7600481B2 (en) | Upper looper driving device of sewing machine | |
| JP5854478B2 (en) | Lower thread feeding device for sewing device | |
| US11390973B2 (en) | Presser device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100826 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100826 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120821 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120914 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150921 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5091601 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |