JP4063166B2 - 電動機の制御装置 - Google Patents
電動機の制御装置 Download PDFInfo
- Publication number
- JP4063166B2 JP4063166B2 JP2003271330A JP2003271330A JP4063166B2 JP 4063166 B2 JP4063166 B2 JP 4063166B2 JP 2003271330 A JP2003271330 A JP 2003271330A JP 2003271330 A JP2003271330 A JP 2003271330A JP 4063166 B2 JP4063166 B2 JP 4063166B2
- Authority
- JP
- Japan
- Prior art keywords
- phase angle
- feature quantity
- axis
- current
- angular velocity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/185—Circuit arrangements for detecting position without separate position detecting elements using inductance sensing, e.g. pulse excitation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
Magnet Motor:以下、IPMモータと記載)におけるセンサレス制御技術に関する。
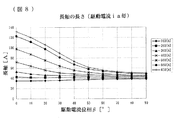
上記の電流ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいた特徴量としては、例えば、長軸の長さa、短軸の長さb、a+b、a×b、√(a2+b2)、b/a、√(a2+b2)÷(a+b)などを用いることが出来る。
図1において、制御手段1(詳細後述)は、電流センサ4と電圧センサ6の信号を入力し、PWM(Pulse Width Modulation)指令7を算出してインバータ回路2へ送る。インバータ回路2は、電源部5の直流電力をPWM指令7に応じた三相電力に変換し、その電力でIPMモータ3を駆動する。電流センサ4はインバータ回路2からIPMモータ3へ送られる三相電力のうちの二相(例えばU相とV相)の駆動電流を検出する。また、電圧センサ6は電源部5の出力電圧(インバータ2の入力電圧)を検出する。上記電流センサ4と電圧センサ6の検出値は制御手段1へ送られ、PWM指令7の算出に用いられる。なお、三相電流は、U+V+W=0の関係があるので、何れかの二相を検出すれば演算で残りの一相の電流も求めることが出来る。
図2において、電流/特徴量目標値作成部10は、外部から与えられたトルク目標値(例えばアクセルペダル操作量等)に基づいてd軸電流目標値、q軸電流目標値および特徴量目標値を作成する。なお、特徴量とは電流ベクトル軌跡の長軸長さと短軸長さの少なくとも一方に基づいた値であり、例えば長軸の長さa、短軸の長さb、a+b、a×b、√(a2+b2)、a/b、√(a2+b2)÷(a+b)などがある(詳細後述)。
電流制御部12(電流−電圧変換)は、例えばPI制御(PI制御は公知の比例・積分制御)を行って、上記のd軸電流目標値とd軸電流、q軸電流目標値とq軸電流とを一致させるように制御するためのd軸電圧指令とq軸電圧指令を算出する。
なお、上記の電流制御には、非干渉制御を入れても良いし、三相電流の高周波分を除くためのローパスフィルタを入れても良い。
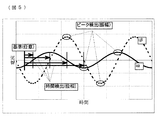
高周波回転電圧発生部14(駆動電流よりも高周波数の重畳電流を重畳する重畳手段)は、高周波の回転電圧を発生させてPWM指令作成部15に送出する。ここで回転電圧とは三相平衡電圧のことであり、図3(a)に示すように、二相交流座標系であるα−β座標系に交換したときに電圧ベクトル軌跡が真円となる状態をいう。この回転電圧は、IPMモータ3に同期しない高周波の電圧であるため、この回転電圧によってIPMモータ3が回転することはない。
なお、IPMモータのようにd軸とq軸とでインダクタンスに差がある場合には、図3(b)に示すように電流ベクトル軌跡はd軸方向に膨らんだ楕円となる。
3相2相変換部17は、周波数分離部16から入力した高周波成分の三相電流を、図3(b)に示すα−β座標系の二相電流に変換し、変換されたα−β座標系の電流をd軸検出部18に送る。

この角度θを±180°の範囲まで拡張するために、連続した検出では90°以上位相が変化することがないという前提を用いる。つまり、後述する図4に示すフローは、たとえば100μsec毎に起動するので、通常90°以上位相が変化することはない。したがって、連続した検出において、89°から−89°に変化した場合には、89°から91°(=−89°+180°)へ変化したものとする。同様に、−89°から89°に変化した場合には、−89°から−91°(=89°+180°−360°)に変化したものとする。これにより、α軸とd軸とのなす角度θを±180°の範囲で検出することができる。
上記のd軸検出部18で求めたα軸から楕円長軸(d軸)までの角度θをd軸位相角θ0とする。
特徴量制御部20(補正角算出手段)は、実際の特徴量と前記特徴量目標値から補正角θ’を算出する。つまり、実際の特徴量が特徴量目標値より大きい場合は、検出位相を進め、小さい場合は遅らせる。このフィードバック制御にはPI制御を用い、制御ゲインは実験的に設定する。
PI制御による補正角θ’の算出は、例えば駆動電流位相角βが増えると共に特徴量の値が下がる場合、下記(数2)式を用いて行う。
なお、後述する様に特徴量を√(a2+b2)÷(a+b)とした場合の様に、駆動電流位相角βが増えると共に特徴量の値が上がる場合には、(数2)式は(数2’)式となる。
すなわち、スイッチSW1は、IPMモータ3の駆動電流(電流センサ4で検出)が予め定められた所定値以上の高負荷領域においてのみオンになる。
スイッチSW1がオンの場合には、d軸検出部18から出力されるd軸位相角θ0と特徴量制御部20から出力された補正角θ’とが加算器26(位相角補正手段)で加算され、それによってθ0がθ’で補正され、位相角θとなる。そして補正後の位相角θがd−q軸変換部11と三相変換部13へ送られ、前記の演算に用いられる。
したがって図2の回路においては、IPMモータ3の駆動電流が予め定められた所定値以上の高負荷領域においては、特徴量に基づいて補正された位相角θが演算に用いられ、高負荷領域以外の動作状態ではd軸検出部18から出力されるd軸位相角θ0がそのまま用いられる。
上記のように、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、d軸検出手段18によって検出されたd軸位相角を補正するように構成すれば、補正する必要の無い低負荷領域では特徴量算出部19や特徴量制御部20における補正角θ’の演算を停止することが出来るので、演算負荷を低減することができる。
まず、図4(a)において、ステップS1では、高周波回転電圧発生部14からの高周波回転電圧に対応した高周波回転電流を流すことにより、仮のd軸を検出する。
ステップS2では、磁極のN極とS極を判別するN/S判定を行って真のd軸を検出する。このN/S判定は、(1)高周波電圧を磁束による飽和が起こる程度の大きな電圧として印加し、楕円の中心がずれる方向を検出する方法、(2)停止時にd軸のみに低周波の正弦波電圧を印加し、d軸電流の正の大きさと負の大きさを比較する方法、(3)d軸のみに正負の直流電流を印加し、それぞれの場合の高周波電流の振幅の大小を比較する方法等があり、そのいずれかを用いて行う。
上記のようにして、真のd軸、つまりd軸位相角を検出し、それを用いてステップS3でトルク制御を行う。この内容は前記図2の電流制御部12以下に記載したとおりである。
ステップS6では、α−β座標系に変換された電流ベクトルのα軸成分iαとβ軸成分iβとにつき、図5に示すように、ピーク値を検出することで振幅Iα、Iβを求めるとともに、ゼロクロスの時間を検出することで重畳電流位相φiα、φiβを求める。
ステップS8〜ステップS10では、上記±90°範囲の初期位相θを±180°範囲に拡張する。このθを±180°範囲に拡張するために、連続した検出では90°以上位相が変化することがないという前提を用いる。つまり、連続した検出で、89°から−89°に変化した場合は、89°から−89°+180°=91°へ変化したものとし、また、−89°から89°に変化した場合は、−89°から89°+180°=269°=−91°ヘ変化したとする。これにより、θを±180°範囲で検出できるが、初めてこの演算結果を出した時には、初期位相がわからない。つまり、初めての演算結果が30°だった場合、30°なのか、−150°なのか分からない。ここでは、暫定的に、初期位相は±90°範囲内としておく。
まずステップS8では、今回の演算が初回か否かを判断し、初回の場合には上記のように判別がつかないので、ステップS11へ行き、演算値をそのまま出力する。初回でない場合にはステップS9へ行く。
ステップS9では、前回演算値θ1と今回の演算値θ2との差の絶対値が90°以上か否かを判断し、90°未満の場合は、ステップS11へ行き、今回の演算値θ2をそのまま出力する。差の絶対値が90°以上の場合にはステップS10で、今回の演算値θ2に180°を加えた値を出力する。
以上の演算(ステップS6〜ステップS11)はd軸検出部18で行う。
特徴量算出部19および特徴量制御部20における位相角の補正は、磁気飽和が起こる場合(高負荷域)に用いる。
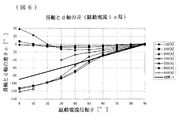
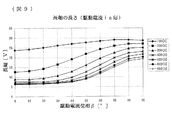
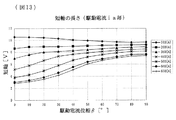
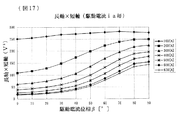
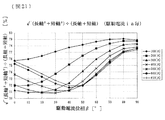
磁気飽和が起こる場合の楕円の長軸とd軸の差θeは、図6に示すようになる。なお、楕円とは図3(b)に示した電流ベクトル軌跡の楕円(楕円電流)を意味する。図6において、縦軸は長軸とd軸の差θe、横軸βは駆動電流位相角(q軸からの位相角)であり、駆動電流ia=√(id 2+iq 2)毎の特性を示している。駆動電流値が小さい場合は、楕円の長軸とd軸は多少の誤差は有るものの、長軸がd軸を示すことに変わりはない(図6では100A〜300A程度の範囲)。しかし、駆動電流値が大きい場合は、楕円の長軸は駆動電流位相角に従って動き、d軸との相関はなくなって、駆動電流位相角との相関が高くなる。このような状態では、位相検出はできない。そこで、磁気飽和がある場合(高負荷域)には、電流ベクトル軌跡の楕円から得られる他の特徴量を用いることにする。
また、b/aを採用する場合は、楕円電流が真円になることも防げるが、他の特徴量の場合は、楕円電流が真円にならないように、特徴量目標値を設定しなけれはならない。
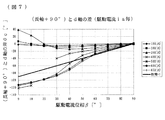
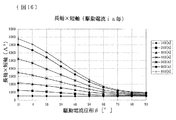
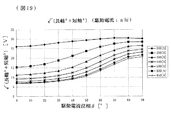
また、図16のように、a×bの場合には、最大トルク時電流位相角は、30°〜50°程度であり、電流毎に傾きは異なるものの直線的であり制御しやすい。この特性はa+b、√(a2+b2)でも同様である。ただし、電動機により特性は異なるので、常に良好な特性となるとは限らない。なお、a×bの場合には、√ の演算が無いため、演算負荷を低減できるという利点も有る。
また、回転数変化による位相検出の遅れを吸収することが可能である。
また、特徴量として「a×b」を用いた場合は、「a+b」や「√(a2+b2)」と同様に、最大トルク発生電流位相角付近(約30°〜60°)での特性が良く、かつ、演算量が少なくて済む、という利点がある。
この実施例は、磁気飽和を生じる高負荷域では、d軸検出部18からのd軸位相角θ0を用いず、特徴量制御部20’のみで、位相を検出する構成を示すものである。
この場合、特徴量制御部20’は、角速度ω’[rad/s]を出力し、積分回路21でω’を積分して位相角θ’[rad]を算出する。すなわち、特徴量制御部20’では、PI制御等により、角速度ω’を算出し、位相角を修正する。特徴量がβにより右下がりの特性を持っている場合、実特徴量が特徴量目標値より大きい場合は角速度ω’を上げ、検出位相を進めて駆動電流位相角βを一定のまま回転座標系を進めることにより、駆動電流位相角βを進める効果を出す。実特徴量が特徴量目標値より小さい場合は、角速度ω’を下げ、検出位相を遅らせて駆動電流位相角βを一定のまま回転座標系を遅らせることにより、電流位相角βを遅らす効果を出す。この際、制御ゲインは実験的に決定する。
上記角速度ω’は、下記(数12)式で求める。また、図20(√(a2+b2)÷(a+b)の特性)の様に、特徴量が駆動電流位相角βに応じて右上がりの特性を持っている場合は、上記角速度ωを下記(数12’)式で求める。
スイッチSW1’は、磁気飽和を生じる高負荷域以外では、d軸検出部18側に接続され、d軸検出部18からのd軸位相角θ0を位相角θとして後続の回路へ送る。そして磁気飽和を生じる高負荷域では、積分回路21側に切り替えられ、角速度ωを積分して算出した値θ’を位相角θとして後続の回路へ送る。
図22の構成によれば、楕円電流が真円になることを留意しなくて済むという利点がある。
この実施例は、d軸検出部18’におけるd軸位相角θ0の演算に角速度ωを用いる構成を示すものである。
図23において、周波数分離部16は、d−q軸変換部11で変換後のd軸電流とq軸電流を入力し、そのうちから高周波成分(高周波d−q軸電流)を分離する。
d軸検出部18’では、d−q軸上に変換された高周波分離された電流ベクトルのd軸成分idとq軸成分iqをそれぞれ、ピーク値検出、0クロスの時間検出により、振幅、位相を求める。この時、d軸から楕円長軸までの角度θは、IαとIβをIdとIqに、φiαとφiβをφidとφiqに変更する以外は、前記(数1)式と同様であるが、これに一定の係数を乗じて(比例演算を行って)角速度ωとして出力する。そして積分回路22で上記ωを積分することにより、d軸位相角θ0を生成して出力する。
図23のようにd−q軸上で長軸検出を行うと、一定回転時に高周波電流ベクトルの軌跡がd−q軸上で楕円の状態で停止するため、回転することによる検出誤差がないという利点がある。
図24に示すように、このフローでは、電流センサ4により検出した電流からd−q軸上に変換(d−q軸変換部11)したのち、高周波成分を分離し、図3(b)の状態とする。そしてd−q座標系に変換された電流ベクトルのd軸成分idとq軸成分iqとにつき、図25に示すように、ピーク値を検出することで振幅Id、Iqを求めるとともに、ゼロクロスの時間を検出することで重畳電流位相φid、φiqを求める。その後の処理は前記図4(b)と同様である。
一方、特徴量制御部20’では、前記の第2の実施例と同様に角速度ω’[rad/s]を出力し、積分回路21でω’を積分して位相角θ’[rad]を算出する。
スイッチSW1’は、磁気飽和を生じる高負荷域以外では、積分回路22側に接続され、積分回路22からのd軸位相角θ0を位相角θとして後続の回路へ送る。そして磁気飽和を生じる高負荷域では、積分回路21側に切り替えられ、角速度ω’を積分して算出した値θ’を位相角θとして後続の回路へ送る。
図27において、d軸検出部18’から出力された角速度ωは、そのままスイッチSW1’へ送られる。また、特徴量制御部20’は、前記図26と同様に角速度ωを出力する。そしてスイッチSW1’は磁気飽和を生じる高負荷域では特徴量制御部20’側へ、高負荷域以外ではd軸検出部18’へ接続される。したがって積分回路23は、高負荷域では特徴量制御部20’からの角速度ω’を積分して位相角θとして出力し、高負荷域以外ではd軸検出部18’からの角速度ωを積分して位相角θとして出力する。
なお、図22、図23のようにθを切り替える場合は、d軸検出部で算出する位相と特徴量制御部で算出する位相に誤差がある場合に、位相が飛ぶことになるが、本実施例のようにωを切り替える場合は、この問題がなくなる。
図28において、d軸検出部18’から出力された角速度ωは、そのまま加算器26へ送られる。また、特徴量制御部20”は、補正角速度ω”を出力し、スイッチSW1がオンの高負荷域では、加算器26で角速度ωに補正角速度ω”を加算する。
積分回路23は、加算器26の出力を積分して位相角θとして出力する。したがって、高負荷域以外ではd軸検出部18’からの角速度ωを積分して位相角θとして出力し、高負荷域では角速度ωを補正角速度ω”で補正した値を積分して位相角θとして出力する。なお、補正角速度ω”の算出式は、前記(数12)式および(数12’)式と同様であるが、前記(数12)式および(数12’)式において明らかなように、特徴量目標値と特徴量とが一致するように動作するため、特徴量制御部20”の出力は補正角速度ω”となる。
この実施例の場合にもωを切り替えるので、θを切り替える場合のように、d軸検出部で算出する位相と特徴量制御部で算出する位相に誤差がある場合に、位相が飛ぶという問題がなくなる。
これまで説明した第1〜第6の実施例は、電圧ベクトル軌跡が真円の高周波電流を重畳し、該高周波電流の電流ベクトル軌跡の長軸の長さと短軸の長さの少なくとも一方に基づいてd軸位相角を補正するという構成であったが、本第7の実施例は、電流ベクトル軌跡が真円の高周波電流を重畳し、該高周波電流のα−β軸上の電圧ベクトル軌跡の長軸の長さと短軸の長さの少なくとも一方に基づいてd軸位相角を補正するという構成である。
高周波電流制御部25は、上記高周波電流と高周波電流目標値とを入力し、高周波電流ベクトル軌跡が真円(図30a参照)となるように、PI制御等を行って高周波三相電圧指令を作成する。
高周波制御は前記した様に、三相(静止座標系)ではなく、d−q軸上(回転座標系)で行うこともできる。
このようにd−q軸上で高周波制御を行い、d−q軸上でd軸検出や特徴量制御を行う場合は、モータ回転時に周波数のずれがない。
なお、楕円の長軸(すなわちq軸)の位相角は、前記(数1)式におけるIαとIβをVαとVβに、φiαとφiβをφvαとφvβに置き換えた式により求めることができる。
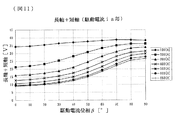
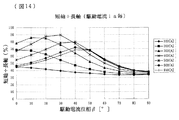
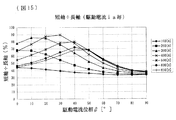
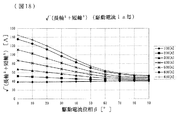
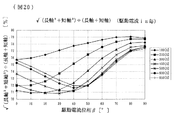
なお、図9、図11、図13、図17、図19、図21の特性では、特徴量は駆動電流位相角βに応じて右上がりの特性を持っているため、実際の特徴量が特徴量目標値より小さい場合は、検出位相を進め(補正角θ’を+)、駆動電流位相角βは一定のまま回転座標系を進めることにより、駆動電流位相βを進める効果を出す。同様に、特徴量目標値より大きい場合は、検出位相を遅らせ(補正角θ’を−)、駆動電流位相角βは一定のまま回転座標系を遅らせることにより、駆動電流位相角βを遅らす効果を出す。この際、制御ゲインは実験的に決定するまた、図15(a/bの特性)の場合は、特徴量が駆動電流位相角βに応じて右下がりの特性を持っているので、進み/遅れの関係が上記とは逆になる。
図31に示すように、このフローでは、高周波電流制御部25の出力電圧をα−β軸上に変換し、図30(b)の状態とする(3相2相変換部17)。そしてα−β座標系に変換された電圧ベクトルのα軸成分vαとβ軸成分vβとにつき、図32に示すように、ピーク値を検出することで振幅と位相を求める。
その後の処理は前記図4(b)と同様である。
本実施例は、高周波電流のα−β軸上の電圧ベクトル軌跡の長軸の長さと短軸の長さの少なくとも一方に基づいてd軸位相角を補正するものにおいて、α−β軸電圧からd軸位相角θ0を算出し、また、特徴量から検出した角速度ω’を積分して位相角θ’を算出し、θ0とθ’の何れかを切替て出力するように構成したものである。この構成は電流ベクトルを用いる前記第2の実施例(図22)に相当するものである。
なお、角速度ωは、前記(数12)式で求める。
本実施例は、高周波電流のd−q軸上の電圧ベクトル軌跡の長軸の長さと短軸の長さの少なくとも一方に基づいてd軸位相角を補正する構成において、d−q軸電圧からd軸位相角θ0を算出する際に、角速度ωを用いる構成を示すものである。この構成は電流ベクトルを用いる前記第3の実施例(図23)に相当するものである。
特徴量制御部20は、d−q軸電圧から求めた補正角θ’を出力し、スイッチSW1がオンの高負荷域では、図23と同様に補正角θ’によってd軸位相角θ0を補正して位相角θとする。
図35に示すように、このフローでは、高周波電流制御部25の出力電圧をd−q軸上に変換し、図30(b)の状態とする。そしてd−q座標系に変換された電圧ベクトルのd軸成分vdとq軸成分vqとにつき、図36に示すように、ピーク値を検出することで振幅Vd、Vqと位相φvd、φvqを求める。
その後の処理は前記図4(b)と同様である。
一方、特徴量制御部20’では、角速度ω’[rad/s]を出力し、積分回路21でω’を積分して位相角θ’[rad]を算出する。
スイッチSW1’は、磁気飽和を生じる高負荷域以外では、積分回路22側に接続され、積分回路22からのd軸位相角θ0を位相角θとして後続の回路へ送る。そして磁気飽和を生じる高負荷域では、積分回路21側に切り替えられ、角速度ω’を積分して算出した値θ’を位相角θとして後続の回路へ送る。
図38において、d軸検出部28’から出力された角速度ωは、そのままスイッチSW1’へ送られ、また、特徴量制御部20’は、前記図37と同様に角速度ω’を出力する。そしてスイッチSW1’は磁気飽和を生じる高負荷域では特徴量制御部20’側へ、高負荷域以外ではd軸検出部28’へ接続される。したがって積分回路23は、高負荷域では特徴量制御部20’からの角速度ω’を積分して位相角θとして出力し、高負荷域以外ではd軸検出部28’からの角速度ωを積分して位相角θとして出力する。
図38の構成によれば、前記第5の実施例(図27)と同様に、角速度ωの状態で切り替えを行うので、位相角θを切り替える際に位相が飛ぶことを防止することができる。
本実施例は、高周波電流のd−q軸上の電圧ベクトル軌跡の長軸の長さと短軸の長さの少なくとも一方に基づいてd軸位相角を補正するものにおいて、角速度ωを補正角速度ω”で補正する構成を示す。この構成は、前記第6の実施例(図28)を電圧ベクトル方式に適用したものに相当する。なお、補正角速度ω”の算出式は、前記第6の実施例と同様に(数12)式および(数12’)式を用いる。
積分回路23は、加算器26の出力ωを積分して位相角θとして出力する。したがって、高負荷域以外ではd軸検出部28’からの角速度ωを積分して位相角θとして出力し、高負荷域では角速度ωを補正角速度ω”で補正した値を積分して位相角θとして出力する。 この実施例の場合にも角速度ωを切り替えるので、位相角θを切り替える場合のように、d軸検出部で算出する位相と特徴量制御部で算出する位相に誤差がある場合に、位相が飛ぶという問題がなくなる。
3…IPMモータ 4…電流センサ
5…電源部 6…電圧センサ
7…PWM指令 10…電流/特徴量目標値作成部
11…d−q軸変換部 12…電流制御部
13…三相変換部 14…高周波回転電圧発生部
15…PWM指令作成部 16…周波数分離部
17…3相2相変換部 18、18’…d軸検出部
19…特徴量算出部 20、20’、20”…特徴量制御部
21、22、23…積分回路 24…周波数分離部
25…高周波電流制御部 26…加算器
27…d−q軸変換部 28、28’…d軸検出部
Claims (38)
- 直流電源に接続され、前記直流電源からの電力を交流に変換して出力すると共に、この出力された交流電力によって電動機を駆動するインバータ回路と、該インバータ回路を目標トルク値に基づいて制御する制御手段と、を備えた電動機の制御装置において、
前記電動機を駆動する駆動電流に、該駆動電流とは異なる周波数の重畳電流を重畳する重畳手段と、
前記目標トルク値に応じて、前記重畳電流の電流ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいた特徴量の目標値を算出する特徴量目標値作成手段と、
前記電動機に供給した電流から前記重畳電流を分離する分離手段と、
前記分離した重畳電流の電流ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいた特徴量実際値を検出する特徴量実際値検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、電動機の位相角を検出する位相角検出手段と、
を備え、前記制御手段は、前記位相角検出手段によって検出された位相角に基づいて前記インバータ回路を制御することを特徴とする電動機の制御装置。 - 前記位相角検出手段は、前記重畳電流の電流ベクトル軌跡からd軸位相角を検出するd軸位相角検出手段を備え、
前記d軸位相角検出手段によって検出された前記d軸位相角を、前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて補正することにより、位相角を検出することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角検出手段は、前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて角速度を算出し、該算出した角速度に基づいて位相角を検出することを特徴とする請求項1に記載の電動機の制御装置。
- 前記位相角検出手段は、
前記分離した重畳電流の電流ベクトル軌跡からd軸位相角を検出するd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、補正角を算出する補正角算出手段と、
前記d軸位相角を前記補正角によって補正する位相角補正手段と、を備え、
前記制御手段は、前記位相角補正手段によって補正された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電流ベクトル軌跡からd軸位相角を検出する第1のd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、角速度ωを検出し、該検出した角速度ωを積分してd軸位相角を算出する第2のd軸位相角算出手段と、
前記第1と第2のd軸位相角検出手段とを切換えて、どちらか一方のd軸位相角を出力する切換手段と、を備え、
前記制御手段は、前記切換手段から出力された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電流ベクトル軌跡から角速度を検出し積分してd軸位相角を検出するd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、補正角を算出する補正角算出手段と、
前記d軸位相角を前記補正角によって補正する位相角補正手段と、を備え、
前記制御手段は、前記位相角補正手段によって補正された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電流ベクトル軌跡から角速度を検出し積分してd軸位相角を検出する第1のd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、角速度ωを検出し、該検出した角速度ωを積分してd軸位相角を算出する第2のd軸位相角算出手段と、
前記第1と第2のd軸位相角検出手段とを切換えて、どちらか一方のd軸位相角を出力する切換手段と、を備え、
前記制御手段は、前記切換手段から出力された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電流ベクトル軌跡から角速度を検出する角速度検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、補正角速度を算出する補正角速度算出手段と、
前記角速度を前記補正角速度によって補正する角速度補正手段と、
前記角速度補正手段の出力を積分して位相角を算出する位相角算出手段と、を備え、
前記制御手段は、前記位相角算出手段によって算出された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電流ベクトル軌跡から角速度を検出する第1の角速度検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、角速度ωを検出する第2の角速度検出手段と、
前記第1と第2の角速度検出手段とを切換えて、どちらか一方の角速度を出力する切換手段と、
前記切換手段の出力を積分して位相角を算出する位相角算出手段と、を備え、
前記制御手段は、前記位相角算出手段から出力された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項1に記載の電動機の制御装置。 - 前記位相角補正手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記d軸位相角検出手段によって検出されたd軸位相角を補正することを特徴とする請求項4または請求項6に記載の電動機の制御装置。
- 前記切換手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記第2のd軸位相角検出手段によって検出されたd軸位相角を出力することを特徴とする請求項5または請求項7に記載の電動機の制御装置。
- 前記角速度補正手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記角速度検出手段によって検出された角速度を補正することを特徴とする請求項8に記載の電動機の制御装置。
- 前記切換手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記第2の角速度検出手段によって検出された角速度を出力することを特徴とする請求項9に記載の電動機の制御装置。
- 前記特徴量目標値および前記特徴量実際値として、重畳電流の電流ベクトル軌跡の長軸長さaと短軸長さbとの積a×bを用いることを特徴とする請求項1乃至請求項13の何れかに記載の電動機の制御装置。
- 前記特徴量目標値および前記特徴量実際値として、重畳電流の電流ベクトル軌跡の短軸長さbと長軸長さaとの比b/aを用いることを特徴とする請求項1乃至請求項13の何れかに記載の電動機の制御装置。
- 前記特徴量目標値および前記特徴量実際値として、重畳電流の電流ベクトル軌跡の長軸長さaと短軸長さbとを下記の式
√(a2+b2)÷(a+b)
に代入して得られる値を用いることを特徴とする請求項1乃至請求項13の何れかに記載の電動機の制御装置。 - 前記重畳電流の電流ベクトル軌跡は、α−β軸上の電流ベクトル軌跡であることを特徴とする請求項1乃至請求項5の何れかに記載の電動機の制御装置。
- 前記重畳電流の電流ベクトル軌跡は、d−q軸上の電流ベクトル軌跡であることを特徴とする請求項1乃至請求項3、または請求項6乃至請求項9の何れかに記載の電動機の制御装置。
- 前記重畳電流は、電圧ベクトル軌跡が真円の高周波電流であり、この高周波電流を重畳して、該高周波電流の電流ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいて位相角を検出することを特徴とする請求項1乃至請求項18の何れかに記載の電動機の制御装置。
- 直流電源に接続され、前記直流電源からの電力を交流に変換して出力すると共に、この出力された交流電力によって電動機を駆動するインバータ回路と、該インバータ回路を目標トルク値に基づいて制御する制御手段と、を備えた電動機の制御装置において、
前記電動機を駆動する駆動電流に、該駆動電流とは異なる周波数の重畳電流を重畳する重畳手段と、
前記目標トルク値に応じて、前記重畳電流の電圧ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいた特徴量の目標値を算出する特徴量目標値作成手段と、
前記電動機に供給した電流から前記重畳電流を分離する分離手段と、
前記分離した重畳電流の電圧ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいた特徴量実際値を検出する特徴量実際値検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、電動機の位相角を検出する位相角検出手段と、
を備え、前記制御手段は、前記位相角検出手段によって検出された位相角に基づいて前記インバータ回路を制御することを特徴とする電動機の制御装置。 - 前記位相角検出手段は、前記重畳電流の電圧ベクトル軌跡からd軸位相角を検出するd軸位相角検出手段を備え、
前記d軸位相角検出手段によって検出された前記d軸位相角を、前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて補正することにより、位相角を検出することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角検出手段は、前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて角速度を算出し、該算出した角速度に基づいて位相角を検出することを特徴とする請求項20に記載の電動機の制御装置。
- 前記位相角検出手段は、
前記分離した重畳電流の電圧ベクトル軌跡からd軸位相角を検出するd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、補正角を算出する補正角算出手段と、
前記d軸位相角を前記補正角によって補正する位相角補正手段と、を備え、
前記制御手段は、前記位相角補正手段によって補正された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電圧ベクトル軌跡からd軸位相角を検出する第1のd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、角速度ωを検出し、該検出した角速度ωを積分してd軸位相角を算出する第2のd軸位相角算出手段と、
前記第1と第2のd軸位相角検出手段とを切換えて、どちらか一方のd軸位相角を出力する切換手段と、を備え、
前記制御手段は、前記切換手段から出力された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電圧ベクトル軌跡から角速度を検出し積分してd軸位相角を検出するd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、補正角を算出する補正角算出手段と、
前記d軸位相角を前記補正角によって補正する位相角補正手段と、を備え、
前記制御手段は、前記位相角補正手段によって補正された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電圧ベクトル軌跡から角速度を検出し積分してd軸位相角を検出する第1のd軸位相角検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、角速度ωを検出し、該検出した角速度ωを積分してd軸位相角を算出する第2のd軸位相角算出手段と、
前記第1と第2のd軸位相角検出手段とを切換えて、どちらか一方のd軸位相角を出力する切換手段と、を備え、
前記制御手段は、前記切換手段から出力された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電圧ベクトル軌跡から角速度を検出する角速度検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、補正角速度を算出する補正角速度算出手段と、
前記角速度を前記補正角速度によって補正する角速度補正手段と、
前記角速度補正手段の出力を積分して位相角を算出する位相角算出手段と、を備え、
前記制御手段は、前記位相角算出手段によって算出された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角検出手段は、
前記分離した重畳電流の電圧ベクトル軌跡から角速度を検出する第1の角速度検出手段と、
前記特徴量目標値作成手段によって算出された特徴量目標値と、前記特徴量実際値検出手段によって検出された特徴量実際値とに基づいて、角速度ωを検出する第2の角速度検出手段と、
前記第1と第2の角速度検出手段とを切換えて、どちらか一方の角速度を出力する切換手段と、
前記切換手段の出力を積分して位相角を算出する位相角算出手段と、を備え、
前記制御手段は、前記位相角算出手段から出力された位相角に基づいて前記インバータ回路を制御することを特徴とする請求項20に記載の電動機の制御装置。 - 前記位相角補正手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記d軸位相角検出手段によって検出されたd軸位相角を補正することを特徴とする請求項23または請求項25に記載の電動機の制御装置。
- 前記切換手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記第2のd軸位相角検出手段によって検出されたd軸位相角を出力することを特徴とする請求項24または請求項26に記載の電動機の制御装置。
- 前記角速度補正手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記角速度検出手段によって検出された角速度を補正することを特徴とする請求項27に記載の電動機の制御装置。
- 前記切換手段は、電動機の駆動電流が予め定められた所定値以上の高負荷領域においてのみ、前記第2の角速度検出手段によって検出された角速度を出力することを特徴とする請求項28に記載の電動機の制御装置。
- 前記特徴量目標値および前記特徴量実際値として、重畳電流の電圧ベクトル軌跡の長軸長さaと短軸長さbとの積a×bを用いることを特徴とする請求項20乃至請求項32の何れかに記載の電動機の制御装置。
- 前記特徴量目標値および前記特徴量実際値として、重畳電流の電圧ベクトル軌跡の短軸長さbと長軸長さaとの比b/aを用いることを特徴とする請求項20乃至請求項32の何れかに記載の電動機の制御装置。
- 前記特徴量目標値および前記特徴量実際値として、重畳電流の電圧ベクトル軌跡の長軸長さaと短軸長さbとを下記の式
√(a2+b2)÷(a+b)
に代入して得られる値を用いることを特徴とする請求項20乃至請求項32の何れかに記載の電動機の制御装置。 - 前記重畳電流の電圧ベクトル軌跡は、α−β軸上の電圧ベクトル軌跡であることを特徴とする請求項20乃至請求項24の何れかに記載の電動機の制御装置。
- 前記重畳電流の電圧ベクトル軌跡は、d−q軸上の電圧ベクトル軌跡であることを特徴とする請求項20乃至請求項22または請求項25乃至請求項28の何れかに記載の電動機の制御装置。
- 前記重畳電流は、電流ベクトル軌跡が真円の高周波電流であり、この高周波電流を重畳して、該高周波電流の電圧ベクトル軌跡の長軸長さと短軸長さとの少なくとも一方に基づいて位相角を検出することを特徴とする請求項20乃至請求項37の何れかに記載の電動機の制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003271330A JP4063166B2 (ja) | 2002-07-31 | 2003-07-07 | 電動機の制御装置 |
| US10/629,896 US7005828B2 (en) | 2002-07-31 | 2003-07-30 | Control device for electric motor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002222623 | 2002-07-31 | ||
| JP2003271330A JP4063166B2 (ja) | 2002-07-31 | 2003-07-07 | 電動機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004080986A JP2004080986A (ja) | 2004-03-11 |
| JP4063166B2 true JP4063166B2 (ja) | 2008-03-19 |
Family
ID=32032779
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003271330A Expired - Fee Related JP4063166B2 (ja) | 2002-07-31 | 2003-07-07 | 電動機の制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7005828B2 (ja) |
| JP (1) | JP4063166B2 (ja) |
Families Citing this family (235)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9060770B2 (en) | 2003-05-20 | 2015-06-23 | Ethicon Endo-Surgery, Inc. | Robotically-driven surgical instrument with E-beam driver |
| US20070084897A1 (en) | 2003-05-20 | 2007-04-19 | Shelton Frederick E Iv | Articulating surgical stapling instrument incorporating a two-piece e-beam firing mechanism |
| CN1331306C (zh) * | 2003-08-28 | 2007-08-08 | 三菱电机株式会社 | 旋转机械的控制装置 |
| GB2410847A (en) * | 2004-02-05 | 2005-08-10 | Dyson Ltd | Control of motor winding energisation according to rotor angle |
| US11890012B2 (en) | 2004-07-28 | 2024-02-06 | Cilag Gmbh International | Staple cartridge comprising cartridge body and attached support |
| US7960938B2 (en) | 2004-12-21 | 2011-06-14 | Rockwell Automation Technologies, Inc. | Method and apparatus for determining motor rotation status |
| JP4811145B2 (ja) * | 2005-06-14 | 2011-11-09 | 日産自動車株式会社 | 多相電動機の回転角検出装置 |
| US7667426B2 (en) * | 2005-06-17 | 2010-02-23 | Gm Global Technology Operations, Inc. | On-line minimum copper loss control of interior permanent-magnet synchronous machine for automotive applications |
| JP4425193B2 (ja) | 2005-08-16 | 2010-03-03 | 三洋電機株式会社 | モータの位置センサレス制御装置 |
| US10159482B2 (en) | 2005-08-31 | 2018-12-25 | Ethicon Llc | Fastener cartridge assembly comprising a fixed anvil and different staple heights |
| US11246590B2 (en) | 2005-08-31 | 2022-02-15 | Cilag Gmbh International | Staple cartridge including staple drivers having different unfired heights |
| US7934630B2 (en) | 2005-08-31 | 2011-05-03 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US11484312B2 (en) | 2005-08-31 | 2022-11-01 | Cilag Gmbh International | Staple cartridge comprising a staple driver arrangement |
| US7669746B2 (en) | 2005-08-31 | 2010-03-02 | Ethicon Endo-Surgery, Inc. | Staple cartridges for forming staples having differing formed staple heights |
| US20070106317A1 (en) | 2005-11-09 | 2007-05-10 | Shelton Frederick E Iv | Hydraulically and electrically actuated articulation joints for surgical instruments |
| US8708213B2 (en) | 2006-01-31 | 2014-04-29 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a feedback system |
| US7845537B2 (en) | 2006-01-31 | 2010-12-07 | Ethicon Endo-Surgery, Inc. | Surgical instrument having recording capabilities |
| US20110295295A1 (en) | 2006-01-31 | 2011-12-01 | Ethicon Endo-Surgery, Inc. | Robotically-controlled surgical instrument having recording capabilities |
| US8186555B2 (en) | 2006-01-31 | 2012-05-29 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting and fastening instrument with mechanical closure system |
| US8820603B2 (en) | 2006-01-31 | 2014-09-02 | Ethicon Endo-Surgery, Inc. | Accessing data stored in a memory of a surgical instrument |
| US11793518B2 (en) | 2006-01-31 | 2023-10-24 | Cilag Gmbh International | Powered surgical instruments with firing system lockout arrangements |
| US20120292367A1 (en) | 2006-01-31 | 2012-11-22 | Ethicon Endo-Surgery, Inc. | Robotically-controlled end effector |
| US8992422B2 (en) | 2006-03-23 | 2015-03-31 | Ethicon Endo-Surgery, Inc. | Robotically-controlled endoscopic accessory channel |
| JP4716118B2 (ja) | 2006-03-29 | 2011-07-06 | 株式会社ジェイテクト | モータ制御装置 |
| US7288923B1 (en) * | 2006-04-21 | 2007-10-30 | Pratt & Whitney Canada Corp. | Voltage-limited electric machine |
| JP4928855B2 (ja) * | 2006-07-05 | 2012-05-09 | 株式会社東芝 | 同期機のセンサレス制御装置 |
| JP4905777B2 (ja) * | 2006-08-10 | 2012-03-28 | 富士電機株式会社 | 交流交流直接変換器の制御装置 |
| JP4770639B2 (ja) * | 2006-08-17 | 2011-09-14 | アイシン・エィ・ダブリュ株式会社 | 電気モータ駆動制御方法および装置 |
| US10568652B2 (en) | 2006-09-29 | 2020-02-25 | Ethicon Llc | Surgical staples having attached drivers of different heights and stapling instruments for deploying the same |
| US11980366B2 (en) | 2006-10-03 | 2024-05-14 | Cilag Gmbh International | Surgical instrument |
| US7932692B2 (en) | 2006-11-13 | 2011-04-26 | Denso Corporation | Control system for rotary electric machine with salient structure |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US8540128B2 (en) | 2007-01-11 | 2013-09-24 | Ethicon Endo-Surgery, Inc. | Surgical stapling device with a curved end effector |
| JP4988374B2 (ja) * | 2007-02-15 | 2012-08-01 | 三洋電機株式会社 | モータ制御装置 |
| JP2008220096A (ja) * | 2007-03-06 | 2008-09-18 | Toshiba Corp | 同期電動機のセンサレス制御装置 |
| US8931682B2 (en) | 2007-06-04 | 2015-01-13 | Ethicon Endo-Surgery, Inc. | Robotically-controlled shaft based rotary drive systems for surgical instruments |
| US11564682B2 (en) | 2007-06-04 | 2023-01-31 | Cilag Gmbh International | Surgical stapler device |
| US11849941B2 (en) | 2007-06-29 | 2023-12-26 | Cilag Gmbh International | Staple cartridge having staple cavities extending at a transverse angle relative to a longitudinal cartridge axis |
| KR101175850B1 (ko) * | 2007-09-27 | 2012-08-24 | 미쓰비시덴키 가부시키가이샤 | 회전 전기 기기의 제어 장치 |
| JP5145850B2 (ja) * | 2007-10-09 | 2013-02-20 | 株式会社デンソー | 回転機の制御装置 |
| US8636736B2 (en) | 2008-02-14 | 2014-01-28 | Ethicon Endo-Surgery, Inc. | Motorized surgical cutting and fastening instrument |
| US11986183B2 (en) | 2008-02-14 | 2024-05-21 | Cilag Gmbh International | Surgical cutting and fastening instrument comprising a plurality of sensors to measure an electrical parameter |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| RU2493788C2 (ru) | 2008-02-14 | 2013-09-27 | Этикон Эндо-Серджери, Инк. | Хирургический режущий и крепежный инструмент, имеющий радиочастотные электроды |
| US7866527B2 (en) | 2008-02-14 | 2011-01-11 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with interlockable firing system |
| US7819298B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with control features operable with one hand |
| US11648005B2 (en) | 2008-09-23 | 2023-05-16 | Cilag Gmbh International | Robotically-controlled motorized surgical instrument with an end effector |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US8210411B2 (en) | 2008-09-23 | 2012-07-03 | Ethicon Endo-Surgery, Inc. | Motor-driven surgical cutting instrument |
| US9005230B2 (en) | 2008-09-23 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Motorized surgical instrument |
| US8608045B2 (en) | 2008-10-10 | 2013-12-17 | Ethicon Endo-Sugery, Inc. | Powered surgical cutting and stapling apparatus with manually retractable firing system |
| JP5402106B2 (ja) * | 2009-03-10 | 2014-01-29 | 日産自動車株式会社 | 電動機の制御装置及び電動機状態推定方法 |
| JP5402105B2 (ja) * | 2009-03-10 | 2014-01-29 | 日産自動車株式会社 | 電動機の制御装置及び電動機状態推定方法 |
| IT1394426B1 (it) | 2009-06-05 | 2012-06-15 | Reel S R L Unipersonale | Metodo di controllo di un motore |
| DE102010044783A1 (de) * | 2010-03-02 | 2011-09-08 | Grob-Werke Gmbh & Co. Kg | Bearbeitungsmaschine |
| JP5481286B2 (ja) * | 2010-06-30 | 2014-04-23 | 日立オートモティブシステムズ株式会社 | 電力変換システムおよび電力変換装置 |
| DE102010031430A1 (de) * | 2010-07-16 | 2012-01-19 | Robert Bosch Gmbh | Verfahren oder Spannungserfassungssystem zum Ermitteln eines Korrekturparameters für einen Messkanal und zum Erfassen einer Klemmenspannung eines Elektromotors |
| JP5194083B2 (ja) * | 2010-09-22 | 2013-05-08 | 山洋電気株式会社 | 電気機器の永久磁石の劣化判定方法及び装置 |
| US9320523B2 (en) | 2012-03-28 | 2016-04-26 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator comprising tissue ingrowth features |
| US9168038B2 (en) | 2010-09-30 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising a tissue thickness compensator |
| US9282962B2 (en) | 2010-09-30 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Adhesive film laminate |
| US9211120B2 (en) | 2011-04-29 | 2015-12-15 | Ethicon Endo-Surgery, Inc. | Tissue thickness compensator comprising a plurality of medicaments |
| US9629814B2 (en) | 2010-09-30 | 2017-04-25 | Ethicon Endo-Surgery, Llc | Tissue thickness compensator configured to redistribute compressive forces |
| US11812965B2 (en) | 2010-09-30 | 2023-11-14 | Cilag Gmbh International | Layer of material for a surgical end effector |
| US11849952B2 (en) | 2010-09-30 | 2023-12-26 | Cilag Gmbh International | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US10945731B2 (en) | 2010-09-30 | 2021-03-16 | Ethicon Llc | Tissue thickness compensator comprising controlled release and expansion |
| US8695866B2 (en) | 2010-10-01 | 2014-04-15 | Ethicon Endo-Surgery, Inc. | Surgical instrument having a power control circuit |
| CA2834649C (en) | 2011-04-29 | 2021-02-16 | Ethicon Endo-Surgery, Inc. | Staple cartridge comprising staples positioned within a compressible portion thereof |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| KR20140084328A (ko) * | 2011-11-30 | 2014-07-04 | 가부시키가이샤 야스카와덴키 | 매트릭스 컨버터 |
| MX358135B (es) | 2012-03-28 | 2018-08-06 | Ethicon Endo Surgery Inc | Compensador de grosor de tejido que comprende una pluralidad de capas. |
| BR112014024098B1 (pt) | 2012-03-28 | 2021-05-25 | Ethicon Endo-Surgery, Inc. | cartucho de grampos |
| GB2503040B (en) * | 2012-06-15 | 2020-05-06 | Danfoss Drives As | Variable torque angle for electric motor |
| US9101358B2 (en) | 2012-06-15 | 2015-08-11 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising a firing drive |
| GB2503039B (en) | 2012-06-15 | 2020-05-27 | Danfoss Drives As | Method for controlling a synchronous reluctance electric motor |
| US20140001231A1 (en) | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Firing system lockout arrangements for surgical instruments |
| US9289256B2 (en) | 2012-06-28 | 2016-03-22 | Ethicon Endo-Surgery, Llc | Surgical end effectors having angled tissue-contacting surfaces |
| US9282974B2 (en) | 2012-06-28 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Empty clip cartridge lockout |
| US9364230B2 (en) | 2012-06-28 | 2016-06-14 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with rotary joint assemblies |
| CN104838581B (zh) * | 2012-12-28 | 2016-08-31 | 日产自动车株式会社 | 电动机控制装置以及电动机控制方法 |
| CN105144565B (zh) * | 2013-02-20 | 2017-12-29 | Trw有限公司 | 电机控制电路和监视电机的方法 |
| MX368026B (es) | 2013-03-01 | 2019-09-12 | Ethicon Endo Surgery Inc | Instrumento quirúrgico articulable con vías conductoras para la comunicación de la señal. |
| BR112015026109B1 (pt) | 2013-04-16 | 2022-02-22 | Ethicon Endo-Surgery, Inc | Instrumento cirúrgico |
| US9826976B2 (en) | 2013-04-16 | 2017-11-28 | Ethicon Llc | Motor driven surgical instruments with lockable dual drive shafts |
| US9445813B2 (en) | 2013-08-23 | 2016-09-20 | Ethicon Endo-Surgery, Llc | Closure indicator systems for surgical instruments |
| US9826977B2 (en) | 2014-03-26 | 2017-11-28 | Ethicon Llc | Sterilization verification circuit |
| JP6532889B2 (ja) | 2014-04-16 | 2019-06-19 | エシコン エルエルシーEthicon LLC | 締結具カートリッジ組立体及びステープル保持具カバー配置構成 |
| JP6612256B2 (ja) | 2014-04-16 | 2019-11-27 | エシコン エルエルシー | 不均一な締結具を備える締結具カートリッジ |
| US20150297222A1 (en) | 2014-04-16 | 2015-10-22 | Ethicon Endo-Surgery, Inc. | Fastener cartridges including extensions having different configurations |
| CN106456176B (zh) | 2014-04-16 | 2019-06-28 | 伊西康内外科有限责任公司 | 包括具有不同构型的延伸部的紧固件仓 |
| US9737301B2 (en) | 2014-09-05 | 2017-08-22 | Ethicon Llc | Monitoring device degradation based on component evaluation |
| BR112017004361B1 (pt) | 2014-09-05 | 2023-04-11 | Ethicon Llc | Sistema eletrônico para um instrumento cirúrgico |
| US11523821B2 (en) | 2014-09-26 | 2022-12-13 | Cilag Gmbh International | Method for creating a flexible staple line |
| US9924944B2 (en) | 2014-10-16 | 2018-03-27 | Ethicon Llc | Staple cartridge comprising an adjunct material |
| US10517594B2 (en) | 2014-10-29 | 2019-12-31 | Ethicon Llc | Cartridge assemblies for surgical staplers |
| US11141153B2 (en) | 2014-10-29 | 2021-10-12 | Cilag Gmbh International | Staple cartridges comprising driver arrangements |
| US9968355B2 (en) | 2014-12-18 | 2018-05-15 | Ethicon Llc | Surgical instruments with articulatable end effectors and improved firing beam support arrangements |
| US9844374B2 (en) | 2014-12-18 | 2017-12-19 | Ethicon Llc | Surgical instrument systems comprising an articulatable end effector and means for adjusting the firing stroke of a firing member |
| MX2017008108A (es) | 2014-12-18 | 2018-03-06 | Ethicon Llc | Instrumento quirurgico con un yunque que puede moverse de manera selectiva sobre un eje discreto no movil con relacion a un cartucho de grapas. |
| US9987000B2 (en) | 2014-12-18 | 2018-06-05 | Ethicon Llc | Surgical instrument assembly comprising a flexible articulation system |
| US10085748B2 (en) | 2014-12-18 | 2018-10-02 | Ethicon Llc | Locking arrangements for detachable shaft assemblies with articulatable surgical end effectors |
| US11154301B2 (en) | 2015-02-27 | 2021-10-26 | Cilag Gmbh International | Modular stapling assembly |
| US10441279B2 (en) | 2015-03-06 | 2019-10-15 | Ethicon Llc | Multiple level thresholds to modify operation of powered surgical instruments |
| US9993248B2 (en) | 2015-03-06 | 2018-06-12 | Ethicon Endo-Surgery, Llc | Smart sensors with local signal processing |
| JP2020121162A (ja) | 2015-03-06 | 2020-08-13 | エシコン エルエルシーEthicon LLC | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 |
| US10433844B2 (en) | 2015-03-31 | 2019-10-08 | Ethicon Llc | Surgical instrument with selectively disengageable threaded drive systems |
| US10105139B2 (en) | 2015-09-23 | 2018-10-23 | Ethicon Llc | Surgical stapler having downstream current-based motor control |
| US10238386B2 (en) | 2015-09-23 | 2019-03-26 | Ethicon Llc | Surgical stapler having motor control based on an electrical parameter related to a motor current |
| US11890015B2 (en) | 2015-09-30 | 2024-02-06 | Cilag Gmbh International | Compressible adjunct with crossing spacer fibers |
| US10736633B2 (en) | 2015-09-30 | 2020-08-11 | Ethicon Llc | Compressible adjunct with looping members |
| US10292704B2 (en) | 2015-12-30 | 2019-05-21 | Ethicon Llc | Mechanisms for compensating for battery pack failure in powered surgical instruments |
| US9571024B1 (en) * | 2016-01-05 | 2017-02-14 | Caterpillar Inc. | Multiphase motor generator system and control method thereof |
| US11213293B2 (en) | 2016-02-09 | 2022-01-04 | Cilag Gmbh International | Articulatable surgical instruments with single articulation link arrangements |
| CN108882932B (zh) | 2016-02-09 | 2021-07-23 | 伊西康有限责任公司 | 具有非对称关节运动构造的外科器械 |
| US10448948B2 (en) | 2016-02-12 | 2019-10-22 | Ethicon Llc | Mechanisms for compensating for drivetrain failure in powered surgical instruments |
| US10357247B2 (en) | 2016-04-15 | 2019-07-23 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10828028B2 (en) | 2016-04-15 | 2020-11-10 | Ethicon Llc | Surgical instrument with multiple program responses during a firing motion |
| US10426467B2 (en) | 2016-04-15 | 2019-10-01 | Ethicon Llc | Surgical instrument with detection sensors |
| US11607239B2 (en) | 2016-04-15 | 2023-03-21 | Cilag Gmbh International | Systems and methods for controlling a surgical stapling and cutting instrument |
| US20170296173A1 (en) | 2016-04-18 | 2017-10-19 | Ethicon Endo-Surgery, Llc | Method for operating a surgical instrument |
| US10433840B2 (en) | 2016-04-18 | 2019-10-08 | Ethicon Llc | Surgical instrument comprising a replaceable cartridge jaw |
| DE102016207375A1 (de) * | 2016-04-29 | 2017-11-02 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Steuern einer Elektromaschine |
| WO2018025319A1 (ja) * | 2016-08-02 | 2018-02-08 | 三菱電機株式会社 | 回転電機の制御装置 |
| US11419606B2 (en) | 2016-12-21 | 2022-08-23 | Cilag Gmbh International | Shaft assembly comprising a clutch configured to adapt the output of a rotary firing member to two different systems |
| US20180168615A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Method of deforming staples from two different types of staple cartridges with the same surgical stapling instrument |
| US11191540B2 (en) | 2016-12-21 | 2021-12-07 | Cilag Gmbh International | Protective cover arrangements for a joint interface between a movable jaw and actuator shaft of a surgical instrument |
| US10835245B2 (en) | 2016-12-21 | 2020-11-17 | Ethicon Llc | Method for attaching a shaft assembly to a surgical instrument and, alternatively, to a surgical robot |
| US10973516B2 (en) | 2016-12-21 | 2021-04-13 | Ethicon Llc | Surgical end effectors and adaptable firing members therefor |
| US20180168625A1 (en) | 2016-12-21 | 2018-06-21 | Ethicon Endo-Surgery, Llc | Surgical stapling instruments with smart staple cartridges |
| JP7010956B2 (ja) | 2016-12-21 | 2022-01-26 | エシコン エルエルシー | 組織をステープル留めする方法 |
| US10537325B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Staple forming pocket arrangement to accommodate different types of staples |
| US10779820B2 (en) | 2017-06-20 | 2020-09-22 | Ethicon Llc | Systems and methods for controlling motor speed according to user input for a surgical instrument |
| US11517325B2 (en) | 2017-06-20 | 2022-12-06 | Cilag Gmbh International | Closed loop feedback control of motor velocity of a surgical stapling and cutting instrument based on measured displacement distance traveled over a specified time interval |
| US10307170B2 (en) | 2017-06-20 | 2019-06-04 | Ethicon Llc | Method for closed loop control of motor velocity of a surgical stapling and cutting instrument |
| US10881399B2 (en) | 2017-06-20 | 2021-01-05 | Ethicon Llc | Techniques for adaptive control of motor velocity of a surgical stapling and cutting instrument |
| US11653914B2 (en) | 2017-06-20 | 2023-05-23 | Cilag Gmbh International | Systems and methods for controlling motor velocity of a surgical stapling and cutting instrument according to articulation angle of end effector |
| US10993716B2 (en) | 2017-06-27 | 2021-05-04 | Ethicon Llc | Surgical anvil arrangements |
| US11564686B2 (en) | 2017-06-28 | 2023-01-31 | Cilag Gmbh International | Surgical shaft assemblies with flexible interfaces |
| US11678880B2 (en) | 2017-06-28 | 2023-06-20 | Cilag Gmbh International | Surgical instrument comprising a shaft including a housing arrangement |
| US20190000459A1 (en) | 2017-06-28 | 2019-01-03 | Ethicon Llc | Surgical instruments with jaws constrained to pivot about an axis upon contact with a closure member that is parked in close proximity to the pivot axis |
| US10765427B2 (en) | 2017-06-28 | 2020-09-08 | Ethicon Llc | Method for articulating a surgical instrument |
| USD906355S1 (en) | 2017-06-28 | 2020-12-29 | Ethicon Llc | Display screen or portion thereof with a graphical user interface for a surgical instrument |
| EP4070740A1 (en) | 2017-06-28 | 2022-10-12 | Cilag GmbH International | Surgical instrument comprising selectively actuatable rotatable couplers |
| US10932772B2 (en) | 2017-06-29 | 2021-03-02 | Ethicon Llc | Methods for closed loop velocity control for robotic surgical instrument |
| US11944300B2 (en) | 2017-08-03 | 2024-04-02 | Cilag Gmbh International | Method for operating a surgical system bailout |
| US11974742B2 (en) | 2017-08-03 | 2024-05-07 | Cilag Gmbh International | Surgical system comprising an articulation bailout |
| US11471155B2 (en) | 2017-08-03 | 2022-10-18 | Cilag Gmbh International | Surgical system bailout |
| US10842490B2 (en) | 2017-10-31 | 2020-11-24 | Ethicon Llc | Cartridge body design with force reduction based on firing completion |
| US10779826B2 (en) | 2017-12-15 | 2020-09-22 | Ethicon Llc | Methods of operating surgical end effectors |
| US20190192148A1 (en) | 2017-12-21 | 2019-06-27 | Ethicon Llc | Stapling instrument comprising a tissue drive |
| US11207065B2 (en) | 2018-08-20 | 2021-12-28 | Cilag Gmbh International | Method for fabricating surgical stapler anvils |
| US11696761B2 (en) | 2019-03-25 | 2023-07-11 | Cilag Gmbh International | Firing drive arrangements for surgical systems |
| US11648009B2 (en) | 2019-04-30 | 2023-05-16 | Cilag Gmbh International | Rotatable jaw tip for a surgical instrument |
| US11903581B2 (en) | 2019-04-30 | 2024-02-20 | Cilag Gmbh International | Methods for stapling tissue using a surgical instrument |
| US11627959B2 (en) | 2019-06-28 | 2023-04-18 | Cilag Gmbh International | Surgical instruments including manual and powered system lockouts |
| US11350938B2 (en) | 2019-06-28 | 2022-06-07 | Cilag Gmbh International | Surgical instrument comprising an aligned rfid sensor |
| US11684434B2 (en) | 2019-06-28 | 2023-06-27 | Cilag Gmbh International | Surgical RFID assemblies for instrument operational setting control |
| US11523822B2 (en) | 2019-06-28 | 2022-12-13 | Cilag Gmbh International | Battery pack including a circuit interrupter |
| US11464601B2 (en) | 2019-06-28 | 2022-10-11 | Cilag Gmbh International | Surgical instrument comprising an RFID system for tracking a movable component |
| US11638587B2 (en) | 2019-06-28 | 2023-05-02 | Cilag Gmbh International | RFID identification systems for surgical instruments |
| US11553971B2 (en) | 2019-06-28 | 2023-01-17 | Cilag Gmbh International | Surgical RFID assemblies for display and communication |
| US11497492B2 (en) | 2019-06-28 | 2022-11-15 | Cilag Gmbh International | Surgical instrument including an articulation lock |
| US11660163B2 (en) | 2019-06-28 | 2023-05-30 | Cilag Gmbh International | Surgical system with RFID tags for updating motor assembly parameters |
| US11771419B2 (en) | 2019-06-28 | 2023-10-03 | Cilag Gmbh International | Packaging for a replaceable component of a surgical stapling system |
| US11478241B2 (en) | 2019-06-28 | 2022-10-25 | Cilag Gmbh International | Staple cartridge including projections |
| US11446029B2 (en) | 2019-12-19 | 2022-09-20 | Cilag Gmbh International | Staple cartridge comprising projections extending from a curved deck surface |
| US11504122B2 (en) | 2019-12-19 | 2022-11-22 | Cilag Gmbh International | Surgical instrument comprising a nested firing member |
| US11576672B2 (en) | 2019-12-19 | 2023-02-14 | Cilag Gmbh International | Surgical instrument comprising a closure system including a closure member and an opening member driven by a drive screw |
| US11911032B2 (en) | 2019-12-19 | 2024-02-27 | Cilag Gmbh International | Staple cartridge comprising a seating cam |
| US11529137B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11529139B2 (en) | 2019-12-19 | 2022-12-20 | Cilag Gmbh International | Motor driven surgical instrument |
| US11844520B2 (en) | 2019-12-19 | 2023-12-19 | Cilag Gmbh International | Staple cartridge comprising driver retention members |
| US11607219B2 (en) | 2019-12-19 | 2023-03-21 | Cilag Gmbh International | Staple cartridge comprising a detachable tissue cutting knife |
| US11464512B2 (en) | 2019-12-19 | 2022-10-11 | Cilag Gmbh International | Staple cartridge comprising a curved deck surface |
| US11701111B2 (en) | 2019-12-19 | 2023-07-18 | Cilag Gmbh International | Method for operating a surgical stapling instrument |
| US11559304B2 (en) | 2019-12-19 | 2023-01-24 | Cilag Gmbh International | Surgical instrument comprising a rapid closure mechanism |
| USD975851S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD974560S1 (en) | 2020-06-02 | 2023-01-03 | Cilag Gmbh International | Staple cartridge |
| USD975850S1 (en) | 2020-06-02 | 2023-01-17 | Cilag Gmbh International | Staple cartridge |
| USD976401S1 (en) | 2020-06-02 | 2023-01-24 | Cilag Gmbh International | Staple cartridge |
| US11871925B2 (en) | 2020-07-28 | 2024-01-16 | Cilag Gmbh International | Surgical instruments with dual spherical articulation joint arrangements |
| US11931025B2 (en) | 2020-10-29 | 2024-03-19 | Cilag Gmbh International | Surgical instrument comprising a releasable closure drive lock |
| US11534259B2 (en) | 2020-10-29 | 2022-12-27 | Cilag Gmbh International | Surgical instrument comprising an articulation indicator |
| US11717289B2 (en) | 2020-10-29 | 2023-08-08 | Cilag Gmbh International | Surgical instrument comprising an indicator which indicates that an articulation drive is actuatable |
| US11844518B2 (en) | 2020-10-29 | 2023-12-19 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11896217B2 (en) | 2020-10-29 | 2024-02-13 | Cilag Gmbh International | Surgical instrument comprising an articulation lock |
| USD980425S1 (en) | 2020-10-29 | 2023-03-07 | Cilag Gmbh International | Surgical instrument assembly |
| USD1013170S1 (en) | 2020-10-29 | 2024-01-30 | Cilag Gmbh International | Surgical instrument assembly |
| US11517390B2 (en) | 2020-10-29 | 2022-12-06 | Cilag Gmbh International | Surgical instrument comprising a limited travel switch |
| US11617577B2 (en) | 2020-10-29 | 2023-04-04 | Cilag Gmbh International | Surgical instrument comprising a sensor configured to sense whether an articulation drive of the surgical instrument is actuatable |
| US11779330B2 (en) | 2020-10-29 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a jaw alignment system |
| US11944296B2 (en) | 2020-12-02 | 2024-04-02 | Cilag Gmbh International | Powered surgical instruments with external connectors |
| US11737751B2 (en) | 2020-12-02 | 2023-08-29 | Cilag Gmbh International | Devices and methods of managing energy dissipated within sterile barriers of surgical instrument housings |
| US11678882B2 (en) | 2020-12-02 | 2023-06-20 | Cilag Gmbh International | Surgical instruments with interactive features to remedy incidental sled movements |
| US11849943B2 (en) | 2020-12-02 | 2023-12-26 | Cilag Gmbh International | Surgical instrument with cartridge release mechanisms |
| US11653915B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Surgical instruments with sled location detection and adjustment features |
| US11653920B2 (en) | 2020-12-02 | 2023-05-23 | Cilag Gmbh International | Powered surgical instruments with communication interfaces through sterile barrier |
| US11890010B2 (en) | 2020-12-02 | 2024-02-06 | Cllag GmbH International | Dual-sided reinforced reload for surgical instruments |
| US11744581B2 (en) | 2020-12-02 | 2023-09-05 | Cilag Gmbh International | Powered surgical instruments with multi-phase tissue treatment |
| US11627960B2 (en) | 2020-12-02 | 2023-04-18 | Cilag Gmbh International | Powered surgical instruments with smart reload with separately attachable exteriorly mounted wiring connections |
| US11730473B2 (en) | 2021-02-26 | 2023-08-22 | Cilag Gmbh International | Monitoring of manufacturing life-cycle |
| US11925349B2 (en) | 2021-02-26 | 2024-03-12 | Cilag Gmbh International | Adjustment to transfer parameters to improve available power |
| US11751869B2 (en) | 2021-02-26 | 2023-09-12 | Cilag Gmbh International | Monitoring of multiple sensors over time to detect moving characteristics of tissue |
| US11723657B2 (en) | 2021-02-26 | 2023-08-15 | Cilag Gmbh International | Adjustable communication based on available bandwidth and power capacity |
| US11701113B2 (en) | 2021-02-26 | 2023-07-18 | Cilag Gmbh International | Stapling instrument comprising a separate power antenna and a data transfer antenna |
| US11950777B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Staple cartridge comprising an information access control system |
| US11980362B2 (en) | 2021-02-26 | 2024-05-14 | Cilag Gmbh International | Surgical instrument system comprising a power transfer coil |
| US11749877B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Stapling instrument comprising a signal antenna |
| US11950779B2 (en) | 2021-02-26 | 2024-04-09 | Cilag Gmbh International | Method of powering and communicating with a staple cartridge |
| US11696757B2 (en) | 2021-02-26 | 2023-07-11 | Cilag Gmbh International | Monitoring of internal systems to detect and track cartridge motion status |
| US11812964B2 (en) | 2021-02-26 | 2023-11-14 | Cilag Gmbh International | Staple cartridge comprising a power management circuit |
| US11793514B2 (en) | 2021-02-26 | 2023-10-24 | Cilag Gmbh International | Staple cartridge comprising sensor array which may be embedded in cartridge body |
| US11744583B2 (en) | 2021-02-26 | 2023-09-05 | Cilag Gmbh International | Distal communication array to tune frequency of RF systems |
| US11723658B2 (en) | 2021-03-22 | 2023-08-15 | Cilag Gmbh International | Staple cartridge comprising a firing lockout |
| US11717291B2 (en) | 2021-03-22 | 2023-08-08 | Cilag Gmbh International | Staple cartridge comprising staples configured to apply different tissue compression |
| US11759202B2 (en) | 2021-03-22 | 2023-09-19 | Cilag Gmbh International | Staple cartridge comprising an implantable layer |
| US11826012B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Stapling instrument comprising a pulsed motor-driven firing rack |
| US11737749B2 (en) | 2021-03-22 | 2023-08-29 | Cilag Gmbh International | Surgical stapling instrument comprising a retraction system |
| US11806011B2 (en) | 2021-03-22 | 2023-11-07 | Cilag Gmbh International | Stapling instrument comprising tissue compression systems |
| US11826042B2 (en) | 2021-03-22 | 2023-11-28 | Cilag Gmbh International | Surgical instrument comprising a firing drive including a selectable leverage mechanism |
| US11832816B2 (en) | 2021-03-24 | 2023-12-05 | Cilag Gmbh International | Surgical stapling assembly comprising nonplanar staples and planar staples |
| US11896219B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Mating features between drivers and underside of a cartridge deck |
| US11849944B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Drivers for fastener cartridge assemblies having rotary drive screws |
| US11793516B2 (en) | 2021-03-24 | 2023-10-24 | Cilag Gmbh International | Surgical staple cartridge comprising longitudinal support beam |
| US11896218B2 (en) | 2021-03-24 | 2024-02-13 | Cilag Gmbh International | Method of using a powered stapling device |
| US11944336B2 (en) | 2021-03-24 | 2024-04-02 | Cilag Gmbh International | Joint arrangements for multi-planar alignment and support of operational drive shafts in articulatable surgical instruments |
| US11903582B2 (en) | 2021-03-24 | 2024-02-20 | Cilag Gmbh International | Leveraging surfaces for cartridge installation |
| US11849945B2 (en) | 2021-03-24 | 2023-12-26 | Cilag Gmbh International | Rotary-driven surgical stapling assembly comprising eccentrically driven firing member |
| US11786239B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Surgical instrument articulation joint arrangements comprising multiple moving linkage features |
| US11744603B2 (en) | 2021-03-24 | 2023-09-05 | Cilag Gmbh International | Multi-axis pivot joints for surgical instruments and methods for manufacturing same |
| US11786243B2 (en) | 2021-03-24 | 2023-10-17 | Cilag Gmbh International | Firing members having flexible portions for adapting to a load during a surgical firing stroke |
| US11857183B2 (en) | 2021-03-24 | 2024-01-02 | Cilag Gmbh International | Stapling assembly components having metal substrates and plastic bodies |
| US20220378425A1 (en) | 2021-05-28 | 2022-12-01 | Cilag Gmbh International | Stapling instrument comprising a control system that controls a firing stroke length |
| US11980363B2 (en) | 2021-10-18 | 2024-05-14 | Cilag Gmbh International | Row-to-row staple array variations |
| US11937816B2 (en) | 2021-10-28 | 2024-03-26 | Cilag Gmbh International | Electrical lead arrangements for surgical instruments |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05199796A (ja) * | 1992-01-17 | 1993-08-06 | Meidensha Corp | 可変速駆動装置の電流制御方式 |
| US5959430A (en) * | 1997-03-07 | 1999-09-28 | Kabushiki Kaisha Toshiba | Power conversion system |
| US6552509B2 (en) * | 2000-05-10 | 2003-04-22 | Gti Electroproject B.V. | Method and a device for sensorless estimating the relative angular position between the stator and rotor of a three-phase synchronous motor |
| EP1198059A3 (en) * | 2000-10-11 | 2004-03-17 | Matsushita Electric Industrial Co., Ltd. | Method and apparatus for position-sensorless motor control |
| JP3502040B2 (ja) * | 2000-12-27 | 2004-03-02 | 本田技研工業株式会社 | ブラシレスdcモータの定数検出装置およびブラシレスdcモータの制御装置およびブラシレスdcモータの定数検出用プログラム |
| JP4687846B2 (ja) * | 2001-03-26 | 2011-05-25 | 株式会社安川電機 | 同期電動機の磁極位置推定方法および制御装置 |
| JP3726713B2 (ja) * | 2001-06-14 | 2005-12-14 | 日産自動車株式会社 | 電動機の制御装置 |
| JP2003037990A (ja) * | 2001-07-24 | 2003-02-07 | Hitachi Ltd | モータ制御装置 |
| JP3801906B2 (ja) * | 2001-11-07 | 2006-07-26 | 株式会社日立製作所 | 電気車の制御装置及び制御方法 |
| JP3695436B2 (ja) * | 2002-09-18 | 2005-09-14 | 株式会社日立製作所 | 位置センサレスモータ制御方法および装置 |
-
2003
- 2003-07-07 JP JP2003271330A patent/JP4063166B2/ja not_active Expired - Fee Related
- 2003-07-30 US US10/629,896 patent/US7005828B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004080986A (ja) | 2004-03-11 |
| US7005828B2 (en) | 2006-02-28 |
| US20040100222A1 (en) | 2004-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4063166B2 (ja) | 電動機の制御装置 | |
| JP5155344B2 (ja) | 電動機の磁極位置推定装置 | |
| JP4674525B2 (ja) | 磁極位置推定方法及びモータ制御装置 | |
| US6781333B2 (en) | Drive control apparatus and method of alternating current motor | |
| JP4519864B2 (ja) | 交流回転機の電気的定数測定方法およびこの測定方法の実施に使用する交流回転機の制御装置 | |
| JP6183291B2 (ja) | 同期モータの制御装置 | |
| TWI654827B (zh) | 換流器控制裝置及馬達驅動系統 | |
| KR20030010480A (ko) | 전동기제어장치 | |
| JP2004112898A (ja) | 位置センサレスモータ制御方法および装置 | |
| JP2008086129A (ja) | 交流電動機の制御装置および定数測定装置 | |
| JP2004048868A (ja) | 同期電動機の速度制御装置 | |
| WO2016121237A1 (ja) | インバータ制御装置及びモータ駆動システム | |
| JPWO2016121751A1 (ja) | インバータ制御装置及びモータ駆動システム | |
| US10637381B2 (en) | Inverter control device and drive system | |
| US9184687B2 (en) | Motor control apparatus and motor control method | |
| JP6726390B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2008118797A (ja) | モータ模擬装置、およびモータ模擬方法 | |
| JP5648310B2 (ja) | 同期モータの制御装置、及び同期モータの制御方法 | |
| JP4007142B2 (ja) | 電動機の制御装置 | |
| JP2008295229A (ja) | モータ模擬装置、およびモータ模擬方法 | |
| KR102409792B1 (ko) | 영구 자석 동기 전동기의 제어 장치, 마이크로 컴퓨터, 전동기 시스템 및 영구 자석 동기 전동기의 운전 방법 | |
| JP3775290B2 (ja) | モーター制御装置 | |
| US9906178B2 (en) | Control apparatus for motor | |
| JP2004120854A (ja) | 電動機の制御装置 | |
| JP4023280B2 (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060529 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071224 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140111 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |