JP2019018796A - Parking control method and parking control device - Google Patents
Parking control method and parking control device Download PDFInfo
- Publication number
- JP2019018796A JP2019018796A JP2017141089A JP2017141089A JP2019018796A JP 2019018796 A JP2019018796 A JP 2019018796A JP 2017141089 A JP2017141089 A JP 2017141089A JP 2017141089 A JP2017141089 A JP 2017141089A JP 2019018796 A JP2019018796 A JP 2019018796A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- steering
- parking
- command
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Description
本発明は、駐車制御方法及び駐車制御装置に関する。 The present invention relates to a parking control method and a parking control device.
無人走行開始時にLEDやスピーカーを用いて車両外部への報知動作を実行する技術が知られている(特許文献1)。 A technique for performing a notification operation to the outside of a vehicle using an LED or a speaker at the start of unmanned traveling is known (Patent Document 1).
しかしながら、従来の駐車制御では、車両外部への報知動作が実行された後に車両が発信するため、車両が動き出すタイミングが分かりにくい。 However, in the conventional parking control, since the vehicle transmits after the notification operation to the outside of the vehicle is executed, it is difficult to understand the timing at which the vehicle starts to move.
本発明が解決しようとする課題は、車両が動き出すタイミングを車両外部の者に分かりやすく示すことである。 The problem to be solved by the present invention is to make it easy for a person outside the vehicle to know the timing at which the vehicle starts to move.
本発明は、車両が停止している第1状態から移動を開始した第2状態に移行する際に、車両を操舵させることにより、上記課題を解決する。 The present invention solves the above problem by steering the vehicle when shifting from the first state in which the vehicle is stopped to the second state in which movement is started.
本発明によれば、車両が動き出すタイミングを車両外部の者に分かりやすく示すことができる。 According to the present invention, the timing at which the vehicle starts to move can be easily shown to a person outside the vehicle.
以下、本発明の実施形態を図面に基づいて説明する。
本実施形態では、本発明に係る駐車制御装置を、駐車制御システムに適用した場合を例にして説明する。駐車制御装置は、車載装置と情報の授受が可能な可搬の操作端末(スマートフォン、PDA:Personal Digital Assistantなどの機器)に適用してもよい。また、本発明に係る駐車制御方法は後述する駐車制御装置において使用できる。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
In this embodiment, a case where the parking control device according to the present invention is applied to a parking control system will be described as an example. The parking control device may be applied to a portable operation terminal (a device such as a smartphone or a PDA: Personal Digital Assistant) capable of exchanging information with the in-vehicle device. Further, the parking control method according to the present invention can be used in a parking control device described later.
図1は、本発明の一実施形態に係る駐車制御装置100を有する駐車制御システム1000のブロック図である。本実施形態の駐車制御システム1000は、カメラ1a〜1dと、測距装置2と、情報サーバ3と、操作端末5と、駐車制御装置100と、車両コントローラ70と、駆動システム40と、操舵角センサ50aと、車速センサ60とを備える。本実施形態の駐車制御装置100は、操作端末5から入力された操作指令に基づいて、駐車スペースに制御対象である車両Vを移動させる(駐車させる)動作を制御する。 FIG. 1 is a block diagram of a parking control system 1000 having a parking control device 100 according to an embodiment of the present invention. The parking control system 1000 of the present embodiment includes a camera 1a to 1d, a distance measuring device 2, an information server 3, an operation terminal 5, a parking control device 100, a vehicle controller 70, a drive system 40, and a steering angle. A sensor 50a and a vehicle speed sensor 60 are provided. The parking control device 100 according to the present embodiment controls an operation of moving (parking) the vehicle V that is a control target in the parking space based on the operation command input from the operation terminal 5.
操作端末5は、車両Vの外部に持ち出し可能な携帯型の入力機能及び通信機能を備えるコンピュータである。操作端末5は、駐車対象である車両Vの運転(動作)を制御するための操作者Mの操作指令の入力を受け付ける。運転には駐車(入庫及び出庫)の操作を含む。操作者Mは、操作端末5を介して駐車を実行させるための操作指令を含む命令を入力する。操作指令は、駐車制御の実行・停止、目標駐車スペースの選択・変更、駐車経路の選択・変更その他の駐車に必要な情報を含む。なお、操作者Mは、操作端末5を用いることなく、操作者Mのジェスチャなどにより操作指令を含む命令を、駐車制御装置100に認識させる(入力する)こともできる。 The operation terminal 5 is a computer having a portable input function and a communication function that can be taken out of the vehicle V. The operation terminal 5 receives an input of an operation command from the operator M for controlling the driving (motion) of the vehicle V that is a parking target. Driving includes parking (incoming and outgoing) operations. The operator M inputs a command including an operation command for executing parking through the operation terminal 5. The operation command includes information necessary for parking control execution / stop, target parking space selection / change, parking route selection / change, and the like. The operator M can cause the parking control device 100 to recognize (input) an instruction including an operation command by using the gesture of the operator M without using the operation terminal 5.
操作端末5は通信機を備え、駐車制御装置100、情報サーバ3と情報の授受が可能である。操作端末5は、通信ネットワークを介して、車外で入力された操作指令を駐車制御装置100へ送信し、操作指令を駐車制御装置100に入力させる。操作端末5は、固有の識別記号を含めた信号を用いて、駐車制御装置100と交信する。
操作端末5は、ディスプレイ53を備える。ディスプレイ53は、入力インターフェイス、各種情報を提示する。ディスプレイ53がタッチパネル型のディスプレイである場合には、操作指令を受け付ける機能を有する。
操作端末5は、本実施形態の駐車制御方法に用いられる操作指令の入力を受け付けるとともに、駐車制御装置100へ向けて操作指令を送出するアプリケーションがインストールされたスマートフォン、PDA:Personal Digital Assistantなどの携帯型の機器であってもよい。
The operation terminal 5 includes a communication device and can exchange information with the parking control device 100 and the information server 3. The operation terminal 5 transmits an operation command input outside the vehicle to the parking control device 100 via the communication network, and causes the parking control device 100 to input the operation command. The operation terminal 5 communicates with the parking control device 100 using a signal including a unique identification symbol.
The operation terminal 5 includes a display 53. The display 53 presents an input interface and various information. When the display 53 is a touch panel type display, it has a function of receiving an operation command.
The operation terminal 5 receives an input of an operation command used in the parking control method of the present embodiment, and is a smartphone installed with an application for sending the operation command to the parking control device 100, a portable device such as a PDA: Personal Digital Assistant. It may be a type of device.
情報サーバ3は、通信可能なネットワーク上に設けられた情報提供装置である。情報サーバは、通信装置31と、記憶装置32を備える。記憶装置32には、読み取り可能な地図情報33と、駐車場情報34と、障害物情報35とを備える。駐車制御装置100、操作端末5は、情報サーバ3の記憶装置32にアクセスして各情報を取得できる。 The information server 3 is an information providing device provided on a communicable network. The information server includes a communication device 31 and a storage device 32. The storage device 32 includes readable map information 33, parking lot information 34, and obstacle information 35. The parking control device 100 and the operation terminal 5 can access the storage device 32 of the information server 3 and acquire each information.
本実施形態の駐車制御装置100は、制御装置10と、入力装置20と、出力装置30とを備える。駐車制御装置100の各構成は、相互に情報の授受を行うためにCAN(Controller Area Network)その他の車載LANによって接続される。入力装置20は、通信装置21を備える。通信装置21は、外部の操作端末5から送信された操作指令を受信し、入力装置20に入力する。外部の操作端末5に操作指令を入力する主体は人間(ユーザ、乗員、ドライバ、駐車施設の作業員)であってもよい。入力装置20は、受け付けた操作指令を制御装置10に送信する。出力装置30は、ディスプレイ31を含む。出力装置30は、駐車制御情報をドライバに伝える。本実施形態のディスプレイ31は、入力機能及び出力機能を備えるタッチパネル式のディスプレイである。ディスプレイ31が入力機能を備える場合には、ディスプレイ31が入力装置20として機能する。操作端末5から入力された操作指令に基づいて車両Vが制御されている場合であっても、乗員が入力装置20を介して緊急停止などの操作指令を入力できる。 The parking control device 100 of this embodiment includes a control device 10, an input device 20, and an output device 30. Each component of the parking control device 100 is connected by a CAN (Controller Area Network) or other vehicle-mounted LAN in order to exchange information with each other. The input device 20 includes a communication device 21. The communication device 21 receives the operation command transmitted from the external operation terminal 5 and inputs it to the input device 20. The subject who inputs the operation command to the external operation terminal 5 may be a human (user, occupant, driver, parking facility worker). The input device 20 transmits the received operation command to the control device 10. The output device 30 includes a display 31. The output device 30 transmits parking control information to the driver. The display 31 of the present embodiment is a touch panel type display having an input function and an output function. When the display 31 has an input function, the display 31 functions as the input device 20. Even when the vehicle V is controlled based on an operation command input from the operation terminal 5, an occupant can input an operation command such as an emergency stop via the input device 20.
本実施形態の駐車制御装置100の制御装置10は、駐車制御プログラムが格納されたROM12と、このROM12に格納されたプログラムを実行することで、本実施形態の駐車制御装置100として機能する動作回路としてのCPU11と、アクセス可能な記憶装置として機能するRAM13とを備える、駐車制御用のコンピュータである。 The control device 10 of the parking control device 100 of the present embodiment includes a ROM 12 that stores a parking control program, and an operation circuit that functions as the parking control device 100 of the present embodiment by executing the program stored in the ROM 12. And a RAM 13 that functions as an accessible storage device.
本実施形態の駐車制御プログラムは、車両Vが停止している第1状態から移動を開始した第2状態に移行する際に、車両Vを操舵させる操舵命令を含む制御命令に従って車両Vの駐車制御を実行させるプログラムを含む。駐車制御プログラムは本実施形態の駐車制御装置100の制御装置10により実行される。 The parking control program according to the present embodiment controls the parking of the vehicle V according to a control command including a steering command for steering the vehicle V when the vehicle V shifts from the first state where the vehicle V is stopped to the second state where the movement is started. Includes a program that executes The parking control program is executed by the control device 10 of the parking control device 100 of the present embodiment.
本実施形態の駐車制御装置100は、外部から操作指令を送り、車両Vの動きを制御して、車両Vを所定の駐車スペースに駐車させるリモートコントロールタイプのものである。乗員は車室外にいてもよいし、車室内にいてもよい。
本実施形態の駐車制御装置100は、操舵操作、アクセル・ブレーキ操作が自動的に行われる自動制御タイプであってもよい。駐車制御装置100は、操舵操作を自動で行い、アクセル・ブレーキ操作をドライバが行う半自動タイプであってもよい。
本実施形態の駐車制御プログラムでは、ユーザが目標駐車スペースを任意に選択してもよいし、駐車制御装置100又は駐車設備側が目標駐車スペースを自動的に設定してもよい。
The parking control device 100 of the present embodiment is of a remote control type that sends an operation command from the outside, controls the movement of the vehicle V, and parks the vehicle V in a predetermined parking space. The occupant may be outside the passenger compartment or in the passenger compartment.
The parking control device 100 of the present embodiment may be an automatic control type in which a steering operation and an accelerator / brake operation are automatically performed. The parking control device 100 may be a semi-automatic type in which a steering operation is automatically performed and an accelerator / brake operation is performed by a driver.
In the parking control program of the present embodiment, the user may arbitrarily select the target parking space, or the parking control device 100 or the parking facility side may automatically set the target parking space.
本実施形態に係る駐車制御装置100の制御装置10は、駐車経路の算出処理、制御命令の算出処理、及び駐車制御処理を実行させる機能を備える。制御装置10は、さらに障害物検出処理を実行させ、障害物の位置を考慮して駐車経路を算出させる機能を備える。各処理を実現するためのソフトウェアと上述したハードウェアの協働により、上記各処理を実行する。 The control device 10 of the parking control device 100 according to the present embodiment has a function of executing a parking route calculation process, a control command calculation process, and a parking control process. The control device 10 further includes a function of executing an obstacle detection process and calculating a parking route in consideration of the position of the obstacle. Each process described above is executed by cooperation of software for realizing each process and the hardware described above.
制御装置10は、駐車経路RTと、駐車経路RTに従って車両Vを移動させる制御命令を算出する。制御命令には、駐車経路RTを移動する際の速度、加減速度、加減速制御の実行位置(タイミング)、切り返し地点、操舵量などを含む。 The control device 10 calculates a parking route RT and a control command for moving the vehicle V according to the parking route RT. The control command includes a speed when moving on the parking route RT, acceleration / deceleration, execution position (timing) of acceleration / deceleration control, a turning point, a steering amount, and the like.
本実施形態の制御命令は、車両Vが停止している第1状態から移動を開始した第2状態に移行する際に車両Vを操舵させる操舵制御命令を含む。車両Vが停止している状態から移動を開始する際に操舵命令を車両Vの操舵装置50に実行させると、車両Vが動き出す際にタイヤが転舵され、タイヤを動かすことができる。タイヤは車両外部に所在する者により視認できる。車両Vが視界に入っている車両外部の者は、タイヤの動きを見て、車両Vの動きに変化があることを予測できる。駐車処理を実行する制御命令に、動き出すことを知らせるための操舵制御の命令を含ませることにより、車両Vが動き出すことを車両外部の者に報知することができる。タイヤの動きと合わせてステアリングホイールが回転するようにしてもよい。車両外部の者が車室内のステアリングホイールの動きも見ることができ、更に車両Vの動きに変化があることを予測しやすくなる。 The control command of the present embodiment includes a steering control command for steering the vehicle V when shifting from the first state in which the vehicle V is stopped to the second state in which movement is started. When the steering command is executed by the steering device 50 of the vehicle V when the movement starts from the state where the vehicle V is stopped, the tire is steered when the vehicle V starts to move, and the tire can be moved. The tire can be visually recognized by a person located outside the vehicle. A person outside the vehicle in which the vehicle V is in sight can predict that there is a change in the movement of the vehicle V by looking at the movement of the tire. By including a steering control command for notifying the start of movement in the control command for executing the parking process, it is possible to notify a person outside the vehicle that the vehicle V starts to move. The steering wheel may be rotated in accordance with the movement of the tire. A person outside the vehicle can also see the movement of the steering wheel in the vehicle interior, and it is easier to predict that there is a change in the movement of the vehicle V.
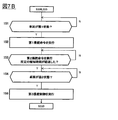
以下、図2に示すフローチャートに基づいて駐車制御の制御手順を説明する。
図2は、本実施形態に係る駐車制御システム1000が実行する駐車制御処理の制御手順を示すフローチャートである。駐車制御処理の開始のトリガは、特に限定されず、駐車制御装置100の起動スイッチが操作されたことをトリガとしてもよい。
Hereinafter, the control procedure of parking control will be described based on the flowchart shown in FIG.
FIG. 2 is a flowchart showing a control procedure of parking control processing executed by the parking control system 1000 according to the present embodiment. The trigger for starting the parking control process is not particularly limited, and may be that the start switch of the parking control device 100 is operated.
本実施形態の駐車制御装置100は、車外から取得した操作指令に基づいて、車両Vを自動的に駐車スペースへ移動させる機能を備える。 The parking control device 100 of the present embodiment has a function of automatically moving the vehicle V to a parking space based on an operation command acquired from outside the vehicle.
ステップ101において、本実施形態に係る駐車制御装置100の制御装置10は、車両Vの複数個所に取り付けられた測距装置2によって測距信号をそれぞれ取得する。制御装置10は、車両Vの複数個所に取り付けられたカメラ1a〜1dによって撮像された撮像画像をそれぞれ取得する。特に限定されないが、車両Vのフロントグリル部にカメラ1aを配置し、リアバンパ近傍にカメラ1dを配置し、左右のドアミラーの下部にカメラ1b、1cを配置する。カメラ1a〜1dとして、視野角の大きい広角レンズを備えたカメラを使用できる。カメラ1a〜1dは、車両Vの周囲の駐車スペースの境界線及び駐車スペースの周囲に存在する物体を撮像する。カメラ1a〜1dは、CCDカメラ、赤外線カメラ、その他の撮像装置である。
In
ステップ102において、制御装置10は、駐車可能な駐車スペースを検出する。制御装置10は、カメラ1a〜1dの撮像画像に基づいて、駐車スペースの枠(領域)を検出する。制御装置10は、測距装置2の検出データ、撮像画像から抽出された検出データを用いて、空いている駐車スペースを検出する。制御装置10は、駐車スペースのうち、空車(他車両が駐車していない)であり、駐車を完了させるための経路が算出可能である駐車スペースを、駐車可能スペースとして検出する。
本実施形態において駐車経路が算出可能であるとは、障害物(駐車車両を含む)と干渉することなく、現在位置から目標駐車スペースに至る経路の軌跡を路面座標に描けることである。
In
In this embodiment, the fact that the parking route can be calculated means that the locus of the route from the current position to the target parking space can be drawn on the road surface coordinates without interfering with obstacles (including parked vehicles).
ステップ103において、制御装置10は、駐車可能スペースを、操作端末5に送信し、そのディスプレイ53に表示し、車両Vを駐車させる目標駐車スペースの選択情報の入力を操作者Mに要求する。目標駐車スペースは、制御装置10、駐車施設側が自動的に選択してもよい。一の駐車スペースを特定する操作指令が操作端末5に入力された場合には、その駐車スペースを目標駐車スペースとして設定する。
In
本実施形態では、ステップ104において、乗員を降車させる。この後は、リモートコントロールにより目標駐車スペースに車両Vを移動させる。目標駐車スペースは、乗員が降車後に選択してもよい。
In this embodiment, in
ステップ106において、制御装置10は、障害物の存在及び障害物の位置を検出する。障害物は、駐車場の壁、柱などの構造物、車両周囲の設置物、歩行者、他車両、駐車車両等を含む。制御装置10は、車両Vに設けられた複数の測距装置2の検出結果、カメラ1の撮像画像に基づいて障害物を検出する。測距装置2は、レーダー装置の受信信号に基づいて物体の存否、物体の位置、物体の大きさ、物体までの距離を検出する。各カメラ1a〜1dの撮像画像に基づいて物体の存否、物体の位置、物体の大きさ、物体までの距離を検出する。なお、障害物の検出は、カメラ1a〜1dによるモーションステレオの技術を用いて行ってもよい。この検出結果は、駐車スペースが空いているか否か(駐車中か否か)の判断に用いられる。また、制御装置10は、情報サーバ3の記憶装置32から取得した駐車場情報34に基づいて、駐車場の壁、柱などの構造物を含む障害物を検出できる。駐車場情報は、各駐車場(パーキングロット)の配置、識別番号、駐車施設における通路、柱、壁、収納スペースなどの位置情報を含む。情報サーバ3は駐車場が管理するものであってもよい。
In
ステップ106において、制御装置10は、車両Vの停止位置から目標駐車スペースに至る駐車経路を算出する。駐車経路は、駐車スペースに移動するために必要な切り返し地点を含む。このとき、駐車経路は線として定義されるとともに、車幅に応じた車両Vの占有領域に応じた帯状の領域として定義される。車両Vの占有領域は、車幅と移動のために確保される余裕幅とを考慮して定義される。
このステップにおいて、制御装置10は、駐車経路上を車両Vに移動させるための車両Vの制御命令を算出する。制御命令は、車両Vの操舵量、操舵速度、操舵加速度、シフトポジション、速度、加速度、及び減速度のうちの何れか一つ以上についての動作命令を含む。また、制御命令は、上記車両Vの動作命令の実行タイミング又は実行位置を含む。
In
In this step, the control device 10 calculates a control command for the vehicle V for moving the vehicle V on the parking route. The control command includes an operation command for any one or more of the steering amount, steering speed, steering acceleration, shift position, speed, acceleration, and deceleration of the vehicle V. Further, the control command includes the execution timing or execution position of the operation command of the vehicle V.
特に、本実施形態の制御命令は、車両Vが停止している第1状態から移動が開始された第2状態に移行する際に車両Vの操舵装置50に実行させる操舵命令を含む。本実施形態における操舵命令は、第1状態から第2状態に至る間に実行される。第1状態から第2状態に至る間以外の操舵命令とは異なる。本実施形態における操舵命令は、停止状態から所定速度に至るまでの間に実行される操舵命令である。 In particular, the control command of the present embodiment includes a steering command that is executed by the steering device 50 of the vehicle V when the vehicle V shifts from the first state where the vehicle V is stopped to the second state where the movement is started. The steering command in the present embodiment is executed during the period from the first state to the second state. This is different from the steering command except during the period from the first state to the second state. The steering command in the present embodiment is a steering command that is executed from the stop state to the predetermined speed.
一般的な駐車経路RTの一例を図3(a)に示し、本実施形態の駐車経路RTの一例を図3(b)に示す。図3(a)(b)に示すように、駐車制御開始地点VSにおける車両Vは駐車経路RTを辿って切り返し地点VTへ移動し、さらに駐車経路RTを辿って目標駐車スペースVPに移動する。 An example of a general parking route RT is shown in FIG. 3A, and an example of the parking route RT of the present embodiment is shown in FIG. As shown in FIGS. 3A and 3B, the vehicle V at the parking control start point VS moves along the parking route RT to the turn-back point VT, and further moves along the parking route RT to the target parking space VP.
図3(a)に示す一般的な駐車経路RTにおいては、駐車制御開始の車両Vが停車している第1状態におけるタイヤSTFの向きは車長方向に沿う方向である。移動を開始して切り返し地点VTへ移動する際に車両Vは直進する。一般的な駐車経路RTは、駐車制御開始地点VSから所定長の直進区間RTLを含む。同様に、切り返し地点VTにおいて一時的に停止した第1状態におけるタイヤSTFの向きは車長方向に沿う方向である。切り返し地点VTで車両Vのシフトポジションはチェンジされ、車両Vは後退を開始するときもタイヤSTFの向きは車長方向であるので、移動を開始して目標駐車スペースVPに移動する際に車両Vは直進する。一般的な駐車経路RTは、切り返し地点VPから所定長の直進区間RTLを含む。一般的な駐車経路RTは、直進区間RTLに対応する直線部分と操舵区間に対応する円弧部分と、直線部分と円弧部分とをつなぐクレソイド曲線部分とを含む。 In the general parking route RT shown in FIG. 3A, the direction of the tire STF in the first state in which the vehicle V that has started parking control is stopped is a direction along the vehicle length direction. The vehicle V goes straight when starting to move and moving to the turning point VT. The general parking route RT includes a straight section RTL having a predetermined length from the parking control start point VS. Similarly, the direction of the tire STF in the first state temporarily stopped at the turning point VT is the direction along the vehicle length direction. Since the shift position of the vehicle V is changed at the turning point VT, and the vehicle V starts to move backward, the direction of the tire STF is the vehicle length direction. Therefore, when the vehicle V starts to move to the target parking space VP, the vehicle V Go straight ahead. The general parking route RT includes a straight section RTL having a predetermined length from the turn-back point VP. The general parking route RT includes a straight line portion corresponding to the straight traveling section RTL, an arc portion corresponding to the steering section, and a cresoid curve portion connecting the straight line portion and the arc portion.
他方、図3(b)に示す本実施形態における駐車経路RTにおいては、駐車制御開始の車両Vが停車している第1状態におけるタイヤSTFの向きは切り返し地点VTが存在する方向(同図では右折方向)に操舵されている。移動を開始して切り返し地点VTへ移動する際に車両Vは発進直後からステアリングホイールの操舵方向又はタイヤSTFの切れ角方向(同図では右側)に旋回する。本実施形態の駐車経路RTは、図3(a)に示した一般的な駐車経路RTにみられる駐車制御開始地点VSから所定長の長さにわたる直進区間RTLを含まない。同様に、切り返し地点VTにおいて一時的に停止した第1状態におけるタイヤSTFの向きは後方の目標駐車スペースVPが存在する方向(同図では進行方向を基準として後方左側)に操舵されている。移動を開始して目標駐車スペースVPへ移動する際に車両Vは発進(後退)直後からステアリングホイールの操舵方向又はタイヤSTFの切れ角方向(同図では後方左側)に旋回する。本実施形態の駐車経路RTは、図3(a)に示した一般的な駐車経路RTにみられる切り返し地点VTから所定長の長さにわたる直進区間RTLを含まない。 On the other hand, in the parking route RT in the present embodiment shown in FIG. 3B, the direction of the tire STF in the first state in which the vehicle V that has started the parking control is stopped is the direction in which the turning point VT exists (in FIG. 3B). It is steered in the right turn direction). When the vehicle V starts to move to the turning point VT, the vehicle V turns in the steering direction of the steering wheel or the turning angle direction of the tire STF (right side in the figure) immediately after starting. The parking route RT of the present embodiment does not include a straight traveling section RTL extending from the parking control start point VS seen in the general parking route RT shown in FIG. Similarly, the direction of the tire STF in the first state temporarily stopped at the turning point VT is steered in the direction in which the rear target parking space VP exists (in the figure, the rear left side with reference to the traveling direction). When the vehicle V starts to move to the target parking space VP, the vehicle V turns in the steering direction of the steering wheel or the turning angle direction of the tire STF (left rear in the figure) immediately after starting (retreating). The parking route RT of the present embodiment does not include a straight section RTL extending from the turn-back point VT seen in the general parking route RT shown in FIG.
図3(b)に示す本実施形態の駐車経路RTは、直進区間RTLに対応する直線部分を含まない。本実施形態の駐車経路RTは、直線部分の長さが短い乃至ゼロである。また、本実施形態の駐車経路RTは、クレソイド曲線部分の長さが短い乃至ゼロである。本実施形態の駐車経路RTは、直線部分と円弧部分とにより構成してもよい。 The parking route RT of the present embodiment shown in FIG. 3B does not include a straight line portion corresponding to the straight traveling section RTL. In the parking route RT of the present embodiment, the length of the straight line portion is short or zero. In the parking route RT of the present embodiment, the length of the crethoid curve portion is short or zero. The parking route RT of the present embodiment may be composed of a straight line portion and an arc portion.
図3(a)に示す一般的な駐車経路RTと図3(b)に示す本実施形態の駐車経路RTとを比較すると、図3(b)に示す本実施形態の駐車経路RTの長さが相対的に短い。第1状態から移動が開始された第2状態に移行する際に操舵命令が実行されることにより、駐車経路RTの直線部分及びクレソイド曲線部分を短くすることができるので、駐車経路を短縮できる。結果として駐車処理に係る時間を短縮できる。 When the general parking route RT shown in FIG. 3A is compared with the parking route RT of this embodiment shown in FIG. 3B, the length of the parking route RT of this embodiment shown in FIG. Is relatively short. Since the steering command is executed when shifting from the first state to the second state in which movement is started, the straight line portion and the cresoid curve portion of the parking route RT can be shortened, so that the parking route can be shortened. As a result, the time required for the parking process can be shortened.
本実施形態の駐車制御方法によれば、第1状態から移動が開始された第2状態に移行する際に行われる操舵命令による移動方向は駐車経路の方向に沿う。操舵命令における操舵方向は、駐車経路における切り返し地点又は目標駐車スペースに至る方向である。
具体的には、駐車制御開始地点VSにおいては、操舵命令における操舵方向は、切り返し地点VTに至る駐車経路の方向に沿う。操舵命令における操舵方向と、駐車制御開始地点VSから切り返し地点VTに至る方向との差は所定角度未満である。
切り返し地点VTにおいては、操舵命令における操舵方向は、切り返し地点VTから目標駐車スペースVPに至る駐車経路の方向に沿う。操舵命令における操舵方向と、切り返し地点VTから目標駐車スペースVPに至る方向との差は所定角度未満である。
操舵命令の実行後のタイヤの切れ角は、車両Vの移動方向と共通するので、車外の者はタイヤの切れ角を見て、その車両Vの進行方向を推測できる。操舵方向が共通するので、車両Vが動き出すことを車外の者に知らせるために操舵命令を実行しても、駐車経路に沿って移動する車両Vの動きを妨げることがない。加えて、図3(b)に示したように、操舵命令における操舵方向が、駐車経路RTの曲線の旋回方向に沿う場合には、操舵命令の実行により車両Vを旋回させることができるので、駐車経路RTの長さを短くできる。結果として駐車完了までの時間を短縮できる。
According to the parking control method of the present embodiment, the moving direction according to the steering command that is performed when shifting from the first state to the second state where movement is started is along the direction of the parking route. The steering direction in the steering command is a direction to a turn-back point in the parking route or a target parking space.
Specifically, at the parking control start point VS, the steering direction in the steering command is along the direction of the parking route leading to the turn-back point VT. The difference between the steering direction in the steering command and the direction from the parking control start point VS to the turn-back point VT is less than a predetermined angle.
At the turning point VT, the steering direction in the steering command is along the direction of the parking route from the turning point VT to the target parking space VP. The difference between the steering direction in the steering command and the direction from the turning point VT to the target parking space VP is less than a predetermined angle.
Since the tire turning angle after execution of the steering command is the same as the moving direction of the vehicle V, a person outside the vehicle can guess the traveling direction of the vehicle V by looking at the tire turning angle. Since the steering direction is common, even if a steering command is executed to notify a person outside the vehicle that the vehicle V starts to move, the movement of the vehicle V moving along the parking route is not hindered. In addition, as shown in FIG. 3B, when the steering direction in the steering command is along the turning direction of the curve of the parking route RT, the vehicle V can be turned by executing the steering command. The length of the parking route RT can be shortened. As a result, the time until parking is completed can be shortened.
本実施形態における車両Vが停止している第1状態から移動を開始した第2状態に移行する際に実行される操舵命令において、操舵量はステアリング角として360度以上に相当する量であることが好ましい。ステアリングホイールを一回転(ステアリング角で360度)させると、タイヤの操舵量としては、タイヤ幅の約半分(50%)が車体から出る状態となり、車外の者がタイヤの移動(回転)を確認できる。操舵命令における操舵量がステアリング角として540度以上であることが好ましい。ステアリングホイールを1.5回転させると、タイヤの操舵量として、タイヤ幅の75%程度が車体から出る状態となり、車外の者がタイヤの移動(回転)を明確に確認できる。操舵命令における操舵量がステアリング角として720度以上であることが好ましい。ステアリングホイールを2回転させると、タイヤの操舵量としては、タイヤ幅の全部(一本分の幅)が車体から出る状態となり、車外の者がタイヤの移動(回転)をより明確に確認できる。車体からタイヤが出る量が多い方が車外の者からの確認は容易になるが、一般的な自動車の操舵機構のラック可動範囲から操舵命令における操舵量は、ステアリング角として900度(2.5回転)程度が最大となる。 In the steering command executed when shifting from the first state in which the vehicle V is stopped in the present embodiment to the second state in which the movement has started, the steering amount is an amount corresponding to 360 degrees or more as the steering angle. Is preferred. When the steering wheel is rotated once (360 degrees in steering angle), about half of the tire width (50%) comes out of the vehicle body as the steering amount of the tire, and the person outside the vehicle confirms the movement (rotation) of the tire it can. The steering amount in the steering command is preferably 540 degrees or more as a steering angle. When the steering wheel is rotated 1.5 times, about 75% of the tire width comes out of the vehicle body as a steering amount of the tire, and a person outside the vehicle can clearly confirm the movement (rotation) of the tire. The steering amount in the steering command is preferably 720 degrees or more as the steering angle. When the steering wheel is rotated twice, the entire tire width (one width) comes out of the vehicle body as the amount of steering of the tire, and a person outside the vehicle can more clearly confirm the movement (rotation) of the tire. Although it is easier for a person outside the vehicle to confirm the amount of tire coming out of the vehicle body, the steering amount in the steering command from the rack movable range of a general automobile steering mechanism is 900 degrees (2.5 Rotation) degree is maximized.
制御装置10は、操舵命令を含み、算出した駐車経路の上を車両Vに移動させるための制御命令を生成する。制御命令に必要な車両Vの諸元情報は、予め制御装置10が記憶する。制御命令は、車両Vが駐車経路を走行する際における、タイミング又は位置に対応づけられた車両Vの操舵量、操舵速度、操舵加速度、シフトポジション、速度(ゼロを含む)、加速度、減速度その他の動作命令を含む。この駐車経路及び駐車経路に対応づけられた動作命令が車両Vによって実行されることにより、目標駐車スペースに車両Vを移動させる(駐車させる)ことができる。 The control device 10 includes a steering command and generates a control command for moving the vehicle V on the calculated parking route. The specification information of the vehicle V necessary for the control command is stored in advance by the control device 10. The control command includes the steering amount, steering speed, steering acceleration, shift position, speed (including zero), acceleration, deceleration, etc. of the vehicle V associated with the timing or position when the vehicle V travels on the parking route. Including the operation instructions. The vehicle V can be moved (parked) to the target parking space by the vehicle V executing an operation command associated with the parking route and the parking route.
図4は、ステップ106のサブルーチンを示す。図4に示すように、ステップ121において、制御装置10は操舵命令を算出する。操舵命令は操舵量と操舵タイミングとを含む。操舵命令における操舵量は360度以上である。好ましくは、720度以上としてもよい。操舵タイミングは、車両Vが停止している第1状態から移動が開始された第2状態に移行する間である。
FIG. 4 shows the subroutine of
操舵タイミングとしては、(1)車両Vが第1状態である、つまり車両Vが停止中(速度ゼロ)のタイミングであってもよいし、(2)車両Vが第2状態である、つまり車両Vの速度が所定値未満であるタイミングであってもよいし、(3)車両Vが第1状態と第2状態の間である、つまり車両Vの速度がゼロではなく、ゼロよりも大きい速度であってかつ所定値未満のタイミングであってもよい。 The steering timing may be (1) the timing when the vehicle V is in the first state, that is, when the vehicle V is stopped (zero speed), or (2) the vehicle V is in the second state, ie, the vehicle. (3) The vehicle V is between the first state and the second state, that is, the speed of the vehicle V is not zero and is a speed greater than zero. However, the timing may be less than a predetermined value.
また、この状態を駐車制御開始からの時間によって限定してもよい。
操舵タイミングとしては、(4)車両Vが第1状態である、つまり駐車制御開始から所定時間以内(車両Vは停止中)であってもよいし、(5)車両Vが第2状態である、つまり駐車制御開始から所定時間経過後のタイミングであってもよいし、(6)車両Vが第1状態と第2状態の間である、つまり駐車制御開始(車両Vは停止中)から所定時間経過後の発進のタイミングであってもよい。
Moreover, you may limit this state with the time from parking control start.
The steering timing may be (4) the vehicle V is in the first state, that is, within a predetermined time from the start of parking control (the vehicle V is stopped), or (5) the vehicle V is in the second state. That is, it may be a timing after a predetermined time has elapsed from the start of parking control. (6) The vehicle V is between the first state and the second state, that is, predetermined after the parking control starts (the vehicle V is stopped). It may be the start timing after the passage of time.
操舵タイミングを上記(1)と(4)を組み合わせて、車両Vが第1状態である、つまり、車両Vが停止中(速度ゼロ)であり、かつ駐車制御開始のタイミングとしてもよい。操舵タイミングを上記(2)と(5)を組み合わせて、車両Vが第2状態である、つまり、車両Vの速度が所定値未満であり、かつ駐車制御開始後の発進タイミングから所定時間経過後のタイミングとしてもよい。操舵タイミングを上記(3)と(6)を組み合わせて、車両Vが第1状態と第2状態の間である、つまり車両Vの速度がゼロよりも大きい速度かつ所定値未満であって、さらに駐車制御開始(車両Vは停止中)から所定時間経過後の発進のタイミングとしてもよい。 The steering timing may be a combination of the above (1) and (4), and the vehicle V is in the first state, that is, the vehicle V is stopped (speed is zero), and the parking control start timing may be used. Combining the steering timings (2) and (5) above, the vehicle V is in the second state, that is, the speed of the vehicle V is less than a predetermined value, and a predetermined time has elapsed from the start timing after the start of parking control. It is good also as the timing. By combining the steering timings (3) and (6) above, the vehicle V is between the first state and the second state, that is, the speed of the vehicle V is greater than zero and less than a predetermined value, It may be the start timing after a predetermined time has elapsed from the start of parking control (the vehicle V is stopped).
操舵命令が算出できたら、ステップ122において、制御装置10は、操舵角及び操舵タイミングが定義された操舵命令による車両Vの動きを考慮した駐車経路が算出できるか否かを判断する。操舵命令を実行すると車両Vを目標駐車スペースにまで案内できない場合があるからである。駐車経路が算出できた場合には、ステップ123へ進む。 If the steering command can be calculated, in step 122, the control device 10 determines whether or not a parking route can be calculated in consideration of the movement of the vehicle V by the steering command in which the steering angle and the steering timing are defined. This is because if the steering command is executed, the vehicle V may not be guided to the target parking space. If the parking route can be calculated, the process proceeds to step 123.
ステップ123において、制御装置10は、操舵命令を含む制御命令を算出できたか否かを判断する。制御命令は、操舵命令を含みかつ算出された駐車経路に沿って車両Vを移動させることができるか否かをシミュレーションする。車両Vの機構において可能であるか否か、上限速度、上限加速度、上限操舵量、上限操舵速度などの条件を満たす制御命令が算出できるか否かを判断する。制御命令が算出できた場合には、図2のステップ107に戻り、操作者Mに経路を提示する。 In step 123, the control device 10 determines whether or not a control command including a steering command has been calculated. The control command includes a steering command and simulates whether or not the vehicle V can be moved along the calculated parking route. It is determined whether or not a control command satisfying conditions such as an upper limit speed, an upper limit acceleration, an upper limit steering amount, and an upper limit steering speed can be calculated. When the control command can be calculated, the process returns to step 107 in FIG.
以下、本実施形態における操舵命令の3つの態様を説明する。この3つの態様の操舵命令は、操舵制御の実行タイミングが異なる。図5A及び図5Bに示す第1の態様は車両Vの停止中に操舵命令を実行する態様であり、図6A及び図6Bに示す第2の態様は車両Vの発進時に操舵命令を実行する態様であり、図7A及び図7Bに示す第3の態様は車両Vの移動中に操舵命令を実行する態様である。本実施形態の操舵命令は、第1操舵命令、第2操舵命令、第3操舵命令を含む。 Hereinafter, three aspects of the steering command in this embodiment will be described. The steering commands of these three modes differ in the execution timing of the steering control. 5A and 5B is a mode in which a steering command is executed while the vehicle V is stopped, and a second mode shown in FIGS. 6A and 6B is a mode in which the steering command is executed when the vehicle V starts. The third mode shown in FIGS. 7A and 7B is a mode in which a steering command is executed while the vehicle V is moving. The steering command of the present embodiment includes a first steering command, a second steering command, and a third steering command.
まず、第1の態様の操舵命令を図5A及び図5Bに基づいて説明する。本態様の操舵命令は第1操舵命令及び第2操舵命令を含む。本態様の操舵命令は第1操舵命令のみを含ませてもよい。
第1操舵命令は、車両Vが停止中である第1状態において実行される。図5Aは、駐車制御の開始から完了までのタイムチャートを示す。駐車制御が開始された後、車両Vは停止中の第1状態から発進の動作を経て移動中の第2状態へ遷移する。本実施形態における第1操舵命令は、第1状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第1操舵命令は、発進動作の前に車両Vの操舵装置50に操舵させる操舵制御を実行させる。この操舵装置50の動作は、いわゆる据え切りの動作である。
First, the steering command of the first aspect will be described based on FIGS. 5A and 5B. The steering command of this aspect includes a first steering command and a second steering command. The steering command of this aspect may include only the first steering command.
The first steering command is executed in a first state where the vehicle V is stopped. FIG. 5A shows a time chart from the start to the completion of parking control. After the parking control is started, the vehicle V transits from the first stopped state to the second moving state through the starting operation. The first steering command in the present embodiment causes steering control to be performed by the steering device 50 of the vehicle V in the first state. The first steering command causes a steering control to cause the steering device 50 of the vehicle V to steer before the start operation. The operation of the steering device 50 is a so-called stationary operation.
これにより、車両Vが発進する前にタイヤを転舵させる第1操舵制御が実行され、タイヤが動くので、車両Vが動き出すことを車両Vの外にいる者に報知できる。リモートコントロールによる駐車制御では、操作者Mが制御対象となる車両Vから離れていることがあり、駐車制御時に車両周囲の歩行者や他車両の運転者とコミュニケーションをとることが難しい。車両V自体が発進前に特徴的な動作を行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御を実行することはない。通常の駐車制御時の挙動に追加して、このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。 Thus, the first steering control for turning the tire before the vehicle V starts is executed, and the tire moves, so that the person outside the vehicle V can be notified that the vehicle V starts to move. In parking control by remote control, the operator M may be away from the vehicle V to be controlled, and it is difficult to communicate with pedestrians around the vehicle and drivers of other vehicles during parking control. Since the vehicle V itself performs a characteristic operation before starting, a pedestrian around the vehicle and a driver of another vehicle can recognize that the vehicle V starts to move. In general parking control, steering control is not executed in a stop state before starting. In addition to the behavior at the time of normal parking control, when the vehicle V performs such a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
第1操舵命令を実行させた後に、所定時間が経過するまで操舵状態を待機させる第2操舵命令を実行してもよい。操舵状態を待機させる所定時間中において操舵装置50は操舵量を維持するように操舵制御を実行する。操舵装置50は、第1操舵命令により指令されたとおりの操舵量だけ、タイヤを転舵させた後は、そのままの状態を保つ。タイヤの操舵状態は変化しない。所定時間中のタイヤの操舵量は一定である。所定時間中、操舵量に応じた切れ角で左右に向きのタイヤもそのままの状態を保つ。そして、所定時間経過後、車両Vの移動を開始させる。車両Vが発進する所定時間前にタイヤを転舵させる第1操舵制御が実行され、車両Vが動き出すことを、事前に、車両Vの外にいる者に報知できる。
このように、車両Vが発進する所定時間前にタイヤを転舵させる第1操舵制御が実行され、車両Vが動き出すことを、事前に、車両Vの外にいる者に報知できる。また、所定時間が経過するまで、その操舵状態で待機する第2操舵制御が実行されるので、車両Vが動き出すことを車両Vの外にいる者に報知できる。操舵後にそのまま発進するのではなく、操舵動作後に所定時間停止するという特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御することはない、さらに、その後に操舵量を維持する操舵制御を実行することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。
After the first steering command is executed, a second steering command that waits for the steering state until a predetermined time elapses may be executed. During a predetermined time for waiting for the steering state, the steering device 50 executes steering control so as to maintain the steering amount. The steering device 50 keeps the state as it is after turning the tire by the steering amount as instructed by the first steering command. The steering state of the tire does not change. The steering amount of the tire during a predetermined time is constant. During a predetermined time, the tires facing left and right at the turning angle corresponding to the steering amount are also kept as they are. And the movement of the vehicle V is started after predetermined time progress. The first steering control for turning the tires is performed a predetermined time before the vehicle V starts, and it is possible to notify the person outside the vehicle V in advance that the vehicle V starts to move.
In this way, it is possible to notify the person outside the vehicle V in advance that the first steering control for turning the tire is performed a predetermined time before the vehicle V starts and the vehicle V starts to move. Further, since the second steering control that waits in the steering state is executed until a predetermined time has elapsed, it is possible to notify a person outside the vehicle V that the vehicle V starts to move. Instead of starting as it is after steering, a characteristic operation of stopping for a predetermined time after the steering operation is performed, so that pedestrians around the vehicle and drivers of other vehicles can recognize that the vehicle V starts to move. it can. In general parking control, steering control is not performed in a stop state before starting, and steering control for maintaining the steering amount is not performed thereafter. Thus, when the vehicle V performs a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
図5Bに基づいて、第1操舵命令を含む操舵命令の処理手順を説明する。同図の処理手順は、図2のステップ109,117のサブルーチンである。
ステップ131において、制御装置10は、車両Vが第1状態であるか否かを判断する。第1状態であるか否かは、車両Vのシフトポジションがパーキングとなっていること、車両Vの速度がゼロであることに基づいて判断する。車両Vが第1状態である場合には、ステップ132に進み、第1操舵命令を実行する。次に、ステップ133において第2操舵命令を実行する。第2操舵命令において設定された待機のための所定時間が経過したことを確認したら、ステップ134において、制御装置10は車両Vを発進させる。発進後のステップ135では、車両Vは第2状態となる。なお、本態様では第1操舵命令の後に第2操舵命令を実行するが、第2操舵命令を実行することなく、ステップ132からステップ134にステップ133をスキップして進むことも可能である。
Based on FIG. 5B, the processing procedure of the steering command including the first steering command will be described. The processing procedure shown in the figure is a subroutine of
In
続いて、第2の態様の操舵命令を図6A及び図6Bに基づいて説明する。本態様の操舵命令は第3操舵命令を含む。第3操舵命令は、車両Vが発進後乃至移動中である第2状態において実行される。図6Aは、駐車制御の開始から完了までのタイムチャートを示す。駐車制御が開始された後、車両Vは停止中の第1状態から発進の動作を経て移動中の第2状態へ遷移する。本実施形態における第3操舵命令は、第2状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第3操舵命令は、発進時乃至移動中に車両Vの操舵装置50に操舵させる操舵制御を実行させる。 Next, the steering command of the second aspect will be described based on FIGS. 6A and 6B. The steering command of this aspect includes a third steering command. The third steering command is executed in the second state in which the vehicle V is starting or moving. FIG. 6A shows a time chart from the start to the completion of parking control. After the parking control is started, the vehicle V transits from the first stopped state to the second moving state through the starting operation. The third steering command in the present embodiment causes steering control to be performed by the steering device 50 of the vehicle V in the second state. The third steering command causes steering control to cause the steering device 50 of the vehicle V to steer when starting or moving.
発進時において車両Vにタイヤを転舵させる第3操舵制御が実行され、タイヤが動くので、車両Vが動き出すことを車両Vの外にいる者に報知できる。リモートコントロールによる駐車制御では、操作者Mが制御対象となる車両Vから離れていることがあり、車両周囲の歩行者や他車両の運転者とコミュニケーションをとることが難しい。車両V自体が発進時に特徴的な動作を行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。 When the vehicle starts, the third steering control for turning the tire on the vehicle V is executed and the tire moves, so that the person outside the vehicle V can be notified that the vehicle V starts to move. In remote control parking control, the operator M may be away from the vehicle V to be controlled, and it is difficult to communicate with pedestrians around the vehicle and drivers of other vehicles. Since the vehicle V itself performs a characteristic operation when starting, a pedestrian around the vehicle and a driver of another vehicle can recognize that the vehicle V starts to move.
図6Bに基づいて、第3操舵命令を含む操舵命令の処理手順を説明する。同図の処理手順は、図2のステップ109,117のサブルーチンである。
ステップ141において、制御装置10は、車両Vが第2状態であるか否かを判断する。第2状態であるか否かは、車両Vのシフトポジションがドライブとなっていること、車両Vの速度がゼロではなく、所定速度未満であることに基づいて判断する。車両Vが第2状態である場合には、ステップ142に進み、第3操舵命令を実行する。
Based on FIG. 6B, the processing procedure of the steering command including the third steering command will be described. The processing procedure shown in the figure is a subroutine of
In
最後に、第3の態様の操舵命令を図7A及び図7Bに基づいて説明する。本態様の操舵命令は第1操舵命令、第2操舵命令及び第3操舵命令を含む。
第1操舵命令は、車両Vが停止中の第1状態及び発進後移動中である第2状態において実行される。
Finally, the steering command of the third aspect will be described based on FIGS. 7A and 7B. The steering command of this aspect includes a first steering command, a second steering command, and a third steering command.
The first steering command is executed in a first state in which the vehicle V is stopped and a second state in which the vehicle V is moving after starting.
図7Aは、駐車制御の開始から完了までのタイムチャートを示す。駐車制御が開始された後、車両Vは停止中の第1状態から発進の動作を経て移動中の第2状態へ遷移する。本実施形態における第1操舵命令は、第1状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第1操舵命令は、発進の前に車両Vの操舵装置50に操舵させる操舵制御を実行させる。この操舵装置50の動作は、いわゆる据え切りの動作である。 FIG. 7A shows a time chart from the start to the completion of parking control. After the parking control is started, the vehicle V transits from the first stopped state to the second moving state through the starting operation. The first steering command in the present embodiment causes steering control to be performed by the steering device 50 of the vehicle V in the first state. The first steering command causes a steering control to cause the steering device 50 of the vehicle V to steer before starting. The operation of the steering device 50 is a so-called stationary operation.
これにより、車両Vが発進する前にタイヤを転舵させる第1操舵制御が実行され、タイヤが動くので、車両Vが動き出すことを車両Vの外にいる者に報知できる。車両V自体が発進前に特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御を実行することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。 Thus, the first steering control for turning the tire before the vehicle V starts is executed, and the tire moves, so that the person outside the vehicle V can be notified that the vehicle V starts to move. Since the vehicle V itself performs a characteristic operation before starting, a pedestrian around the vehicle and a driver of another vehicle can recognize that the vehicle V starts to move. In general parking control, steering control is not executed in a stop state before starting. Thus, when the vehicle V performs a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
本態様では、第1操舵命令を実行させた後に、所定時間が経過するまで待機させる第2操舵命令を実行する。待機させる所定時間中において操舵装置50は何も実行しない。操舵装置50は、第1操舵命令により指令されたとおりの操舵量だけタイヤを転舵させた後は、そのままの状態を保つ。ステアリングホイール及びタイヤの操舵状態は変化しない。所定時間中のタイヤの操舵量は一定である。所定時間中、操舵量に応じた切れ角で左右に向きのタイヤもそのままの状態を保つ。
このように、車両Vが発進する前にタイヤを転舵させる第1操舵制御が実行され、その状態で待機する第2操舵制御が実行されるので、車両Vが動き出すことを車両Vの外にいる者に報知できる。操舵後にそのまま発進するのではなく、操舵動作後に所定時間停止するという特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御、その後に停止制御を実行することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。
In the present aspect, after the first steering command is executed, the second steering command for waiting until a predetermined time elapses is executed. The steering device 50 does nothing during the predetermined time to wait. The steering device 50 maintains the state after turning the tire by the steering amount as instructed by the first steering command. The steering state of the steering wheel and tire does not change. The steering amount of the tire during a predetermined time is constant. During a predetermined time, the tires facing left and right at the turning angle corresponding to the steering amount are also kept as they are.
Thus, the first steering control for turning the tire is executed before the vehicle V starts, and the second steering control for standby in that state is executed, so that the vehicle V starts to move outside the vehicle V. Can be reported to those who are. Since it does not start as it is after steering but is added with a characteristic operation of stopping for a predetermined time after the steering operation, pedestrians around the vehicle and drivers of other vehicles can recognize that the vehicle V starts to move. it can. In general parking control, steering control is not executed in a stop state before starting, and stop control is not executed thereafter. Thus, when the vehicle V performs a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
本態様では、第2操舵命令を実行させた後に第3操舵命令を実行する。
第3操舵命令は、車両Vが発進乃至移動中である第2状態において実行される。本実施形態における第3操舵命令は、発進乃至移動中の第2状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第3操舵命令は、発進乃至移動中に車両Vの操舵装置50に操舵させる操舵制御を実行させる。
In this aspect, the third steering command is executed after the second steering command is executed.
The third steering command is executed in the second state in which the vehicle V is starting or moving. The third steering command in the present embodiment causes the steering control to cause the steering device 50 of the vehicle V in the second state that is starting or moving to be steered. The third steering command causes the steering control to cause the steering device 50 of the vehicle V to steer while starting or moving.
発進乃至移動中において車両Vにタイヤを転舵させる第3操舵制御が実行され、タイヤが動くので、車両Vが動き出すことを車両Vの外にいる者に報知できる。車両V自体が発進時に特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。 The third steering control for turning the tire on the vehicle V during the start or movement is executed and the tire moves, so that the person outside the vehicle V can be notified that the vehicle V starts to move. Since the vehicle V itself performs a characteristic operation when starting, a pedestrian around the vehicle and a driver of another vehicle can recognize that the vehicle V starts to move.
図7Bに基づいて、第1操舵命令を含む操舵命令の処理手順を説明する。同図の処理手順は、図2のステップ109,117のサブルーチンである。
ステップ151において、制御装置10は、車両Vが第1状態であるか否かを判断する。第1状態であるか否かは、車両Vのシフトポジションがパーキングとなっていること、車両Vの速度がゼロであることに基づいて判断する。車両Vが第1状態である場合には、ステップ152に進み、第1操舵命令を実行する。続いて、ステップ153において第2操舵命令を実行する。第2操舵命令において設定された待機のための所定時間が経過したことを確認したら、ステップ154において、制御装置10は、車両Vが第2状態であるか否かを判断する。第2状態であるか否かは、車両Vのシフトポジションがドライブとなっていること、車両Vの速度がゼロではなく、所定速度未満であることに基づいて判断する。駐車制御開始後であって、かつ第1状態ではないという判断によっても、車両Vが第2状態であるか否かを判断できる。車両Vが第2状態である場合には、ステップ155に進み、第3操舵命令を実行する。
Based on FIG. 7B, the processing procedure of the steering command including the first steering command will be described. The processing procedure shown in the figure is a subroutine of
In
図2に戻り、ステップ109以降の処理を説明する。本実施形態の駐車制御装置100は、車両Vに搭乗することなく、外部から車両Vに目標駐車スペースの設定指令、駐車制御処理の開始指令、駐車中断・中止指令などを送信して駐車を行うリモートコントロールによる駐車制御処理を実行する。ステップ107において、制御装置10は、操作端末5のディスプレイ53に駐車経路を提示する。
Returning to FIG. 2, the processing after
ステップ108において、駐車経路が適当であると確認された場合には、ステップ109に進む。ステップ109において、制御装置10は操舵命令を操舵装置50に実行させる。操舵装置50は、操舵命令に従い、タイヤを転舵させ、タイヤを動かす。車外にいる操作者M及び通行人等は、車両Vが移動開始することを知る。
ステップ110において、本実施形態の制御装置10は、この操舵命令の実行後に、車外の操作者Mの実行命令を受け付ける。すなわち、操舵命令が実行された後に、車両Vの外の操作者Mから取得した操作指令に基づいて車両Vの駐車処理を開始させる。車外の操作者Mは、車両Vのタイヤの動きから駐車処理の開始が可能であることを知る。この動きを確認した操作者Mは、再度車両Vの周囲を確認し、リモート操作による実行命令を入力する。他方、車外の通行人(操作者M以外)は、車両Vのタイヤの動きからその車両Vが移動を開始することを知る。操作命令が実行されることにより、操作者Mはリモートコントロールの実行タイミングを知り、他の通行者は車両Vが動き出すタイミングを知ることができる。ステップ111において、制御装置10は操作者Mのリモート操作による実行命令に従い、駐車制御を実行する。
If it is confirmed in
In
ステップ112において、制御装置10は、周囲の障害物を周期的に検出する。ステップ113において、制御装置10は、障害物が接近するなどの車両周囲の環境に変化があるか否かを判断する。変化があれば駐車経路を再度算出する。新たに適切な駐車経路が算出できた場合には、新たな駐車経路を採用する。制御装置10は新たな駐車経路について制御命令を算出する。ステップ114において、制御装置10は、ステップ106で算出した駐車経路及び制御命令を、時間の経過に伴い出現した障害物に応じた新たな駐車経路及び制御命令に更新する。ステップ113において変化がなければ、新たな駐車経路及び制御命令を算出する必要はないのでステップ115へ進む。
In
ステップ115において、制御装置10は、車両Vが切り返し地点に到達するまで、車両周囲の障害物を監視する。車両Vが切り返し地点に到達したら、ステップ116において、制御命令に含まれるシフトチェンジを実行する。その後、ステップ117において制御命令を継続的に実行することで駐車制御を完了させる。
In
本実施形態の駐車制御装置100は、車両Vが駐車経路に沿って移動するように、制御命令に従い、車両コントローラ70を介して駆動システム40の動作を制御する。駐車制御装置100は、計算された駐車経路に車両Vの走行軌跡が一致するように操舵装置50が備える操舵角センサ50aの出力値をフィードバックしながらEPSモータなどの車両Vの駆動システム40への指令を演算し、この指令の信号を駆動システム40又は駆動システム40を制御する車両コントローラ70へ送出する。 The parking control device 100 of the present embodiment controls the operation of the drive system 40 via the vehicle controller 70 in accordance with the control command so that the vehicle V moves along the parking route. The parking control device 100 feeds back the output value of the steering angle sensor 50a included in the steering device 50 so that the travel locus of the vehicle V coincides with the calculated parking route, and supplies it to the drive system 40 of the vehicle V such as an EPS motor. The command is calculated, and a signal of this command is sent to the drive system 40 or the vehicle controller 70 that controls the drive system 40.
本実施形態の駐車制御装置100は、駐車制御コントロールユニットを備える。駐車制御コントロールユニットは、AT/CVTコントロールユニットからのシフトレンジ情報、ABSコントロールユニットからの車輪速情報、舵角コントロールユニットからの舵角情報、ECMからのエンジン回転数情報等を取得する。駐車制御コントロールユニットは、これらに基づいて、EPSコントロールユニットへの自動操舵に関する指示情報、メータコントロールユニットへの警告等の指示情報等を演算し、出力する。制御装置10は、車両Vの操舵装置50が備える操舵角センサ50a、車速センサ60その他の車両Vが備えるセンサが取得した各情報を、車両コントローラ70を介して取得する。 The parking control device 100 of this embodiment includes a parking control control unit. The parking control unit obtains shift range information from the AT / CVT control unit, wheel speed information from the ABS control unit, rudder angle information from the rudder angle control unit, engine speed information from the ECM, and the like. Based on these, the parking control control unit calculates and outputs instruction information regarding automatic steering to the EPS control unit, instruction information such as a warning to the meter control unit, and the like. The control device 10 acquires, via the vehicle controller 70, each piece of information acquired by the steering angle sensor 50a provided in the steering device 50 of the vehicle V, the vehicle speed sensor 60, and other sensors provided in the vehicle V.
本実施形態の駆動システム40は、駐車制御装置100から取得した指令信号に基づく駆動により、車両Vを現在位置から目標駐車スペースに移動(走行)させる。本実施形態の操舵装置50は、車両Vの左右方向への移動を行う駆動機構である。駆動システム40に含まれるEPSモータは、駐車制御装置100から取得した制御指令信号に基づいて操舵装置50の操舵機構が備えるパワーステアリング機構を駆動してタイヤの操舵量を制御し、車両Vを目標駐車スペースへ移動する際の操作を制御する。なお、駐車をさせるための車両Vの制御内容及び動作手法は特に限定されず、出願時において知られた手法を適宜に適用できる。 The drive system 40 of the present embodiment moves (runs) the vehicle V from the current position to the target parking space by driving based on the command signal acquired from the parking control device 100. The steering device 50 of this embodiment is a drive mechanism that moves the vehicle V in the left-right direction. The EPS motor included in the drive system 40 drives the power steering mechanism provided in the steering mechanism of the steering device 50 based on the control command signal acquired from the parking control device 100 to control the steering amount of the tire, and targets the vehicle V. Control the operation when moving to the parking space. In addition, the control content and operation | movement method of the vehicle V for parking are not specifically limited, The method known at the time of application can be applied suitably.
本実施形態における駐車制御装置100は、車両Vの位置と目標駐車スペースの位置とに基づいて算出された経路に沿って、車両Vを目標駐車スペースへ移動させる際に、アクセル・ブレーキが指定された制御車速(設定車速)に基づいて自動的に制御されるとともに、操舵装置50の操作が車速に応じて自動で車両Vの動きを制御する。 In the parking control device 100 according to the present embodiment, when moving the vehicle V to the target parking space along the route calculated based on the position of the vehicle V and the position of the target parking space, the accelerator / brake is designated. The vehicle is automatically controlled based on the controlled vehicle speed (set vehicle speed), and the operation of the steering device 50 automatically controls the movement of the vehicle V according to the vehicle speed.
本発明の実施形態の駐車制御方法は、以上のように駐車制御装置において使用されるので、以下の効果を奏する。本実施形態の駐車制御装置100は、以上のように構成され動作するので、以下の効果を奏する。 Since the parking control method of the embodiment of the present invention is used in the parking control device as described above, the following effects can be obtained. Since the parking control device 100 of the present embodiment is configured and operates as described above, the following effects are achieved.
[1]本実施形態の駐車制御方法によれば、車両Vが停止している状態から移動を開始する際に操舵命令を車両Vの操舵装置50に実行させると、車両Vが動き出す際にタイヤを動かすことができる。タイヤは車両外部に所在する者により視認できる。車両Vが視界に入っている車両外部の者は、タイヤの動きを見て、車両Vの動きに変化があることを予測できる。駐車処理を実行する制御命令に動き出すことを知らせるための操舵制御の命令を含ませることにより、車両Vが動き出すことを車両外部の者に報知することができる。一般的な駐車制御において行われることのない特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。 [1] According to the parking control method of the present embodiment, when the steering command is executed by the steering device 50 of the vehicle V when the vehicle V starts moving from the stopped state, the tire is generated when the vehicle V starts to move. Can be moved. The tire can be visually recognized by a person located outside the vehicle. A person outside the vehicle in which the vehicle V is in sight can predict that there is a change in the movement of the vehicle V by looking at the movement of the tire. By including a steering control command for notifying the start of movement in the control command for executing the parking process, it is possible to notify a person outside the vehicle that the vehicle V starts to move. When the vehicle V performs a characteristic operation that is not performed in general parking control, a change in the behavior of the vehicle V can be notified to the surroundings.
[2]本実施形態の駐車制御方法における操舵命令の第1操舵命令は、第1状態の車両Vの操舵装置50に操舵させる操舵制御を実行させる。第1操舵命令は、発進動作の前に車両Vの操舵装置50に操舵させる操舵制御を実行させる。この操舵装置50の動作は、いわゆる据え切りの動作である。これにより、車両Vの発進する前にタイヤを転舵させる操舵制御が実行され、タイヤが動くので、車両Vが動き出すことを車両Vの外にいる者に報知できる。リモートコントロールによる駐車制御では、操作者Mが制御対象となる車両Vから離れていることがあり、車両周囲の歩行者や他車両の運転者とコミュニケーションをとることが難しい。車両V自体が発進前に特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御を実行することはない。通常の駐車制御時の挙動に追加して、このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。 [2] The first steering command of the steering command in the parking control method of the present embodiment causes the steering control to cause the steering device 50 of the vehicle V in the first state to be steered. The first steering command causes a steering control to cause the steering device 50 of the vehicle V to steer before the start operation. The operation of the steering device 50 is a so-called stationary operation. Thereby, the steering control for turning the tire before the vehicle V starts is executed, and the tire moves, so that the person outside the vehicle V can be notified that the vehicle V starts to move. In remote control parking control, the operator M may be away from the vehicle V to be controlled, and it is difficult to communicate with pedestrians around the vehicle and drivers of other vehicles. Since the vehicle V itself performs a characteristic operation before starting, a pedestrian around the vehicle and a driver of another vehicle can recognize that the vehicle V starts to move. In general parking control, steering control is not executed in a stop state before starting. In addition to the behavior at the time of normal parking control, when the vehicle V performs such a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
[3]本実施形態の駐車制御方法における操舵命令の第1操舵命令を実行させた後に、所定時間経過後、第2状態へ移行するようにしてもよい。操舵装置50は、第1操舵命令により指令されたとおりの操舵量だけタイヤを転舵させた後、所定時間経過後、車両Vの移動を開始させる。このように、車両Vが発進する所定時間前にタイヤを転舵させる第1操舵制御が実行され、車両Vが動き出すことを、事前に、車両Vの外にいる者に報知できる。操舵後にそのまま発進するのではなく、操舵動作後に所定時間停止するという特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。 [3] After executing the first steering command of the steering command in the parking control method of the present embodiment, the state may be shifted to the second state after a predetermined time has elapsed. The steering device 50 starts the movement of the vehicle V after a predetermined time has elapsed after turning the tire by the steering amount as commanded by the first steering command. In this way, it is possible to notify the person outside the vehicle V in advance that the first steering control for turning the tire is performed a predetermined time before the vehicle V starts and the vehicle V starts to move. Since it does not start as it is after steering but is added with a characteristic operation of stopping for a predetermined time after the steering operation, pedestrians around the vehicle and drivers of other vehicles can recognize that the vehicle V starts to move. it can. In general parking control, steering control is not performed in a stop state before starting. Thus, when the vehicle V performs a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
[4]本実施形態の駐車制御方法における操舵命令の第1操舵命令を実行させた後に、所定時間が経過するまで操舵状態を待機させる第2操舵命令を実行してもよい。操舵状態を待機させる所定時間中において操舵装置50は操舵量を維持するように操舵制御を実行する。操舵装置50は、第1操舵命令により指令されたとおりの操舵量だけ、タイヤを転舵させた後は、そのままの状態を保つ。タイヤの操舵状態は変化しない。所定時間中のタイヤの操舵量は一定である。所定時間中、操舵量に応じた切れ角で左右に向きのタイヤもそのままの状態を保つ。このように、車両Vが発進する前にタイヤを転舵させる第1操舵制御が実行され、その状態で待機する第2操舵制御が実行されるので、車両Vが動き出すことを車両Vの外にいる者に報知できる。操舵後にそのまま発進するのではなく、操舵動作後に所定時間停止するという特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。一般的な駐車制御において、発進する前に、停止状態において操舵制御、その後に操舵量を維持する操舵制御を実行することはない。このように特徴的な動作を車両Vが行うことにより、車両Vの挙動の変化を周囲に報知できる。 [4] After executing the first steering command of the steering command in the parking control method of the present embodiment, a second steering command for waiting for the steering state until a predetermined time elapses may be executed. During a predetermined time for waiting for the steering state, the steering device 50 executes steering control so as to maintain the steering amount. The steering device 50 keeps the state as it is after turning the tire by the steering amount as instructed by the first steering command. The steering state of the tire does not change. The steering amount of the tire during a predetermined time is constant. During a predetermined time, the tires facing left and right at the turning angle corresponding to the steering amount are also kept as they are. Thus, the first steering control for turning the tire is executed before the vehicle V starts, and the second steering control for standby in that state is executed, so that the vehicle V starts to move outside the vehicle V. Can be reported to those who are. Since it does not start as it is after steering but is added with a characteristic operation of stopping for a predetermined time after the steering operation, pedestrians around the vehicle and drivers of other vehicles can recognize that the vehicle V starts to move. it can. In general parking control, steering control in a stop state is not performed before starting, and then steering control for maintaining the steering amount is not executed. Thus, when the vehicle V performs a characteristic operation, a change in the behavior of the vehicle V can be notified to the surroundings.
[5]本実施形態の駐車制御方法では、発進時において車両Vにタイヤを転舵させる第3操舵制御が実行され、タイヤが動くので、車両Vが動き出すことを車両Vの外にいる者に報知できる。リモートコントロールによる駐車制御では、操作者Mが制御対象となる車両Vから離れていることがあり、車両周囲の歩行者や他車両の運転者とコミュニケーションをとることが難しい。車両V自体が発進時に特徴的な動作を追加して行うため、車両周囲の歩行者や他車両の運転者は車両Vが動き出すことを認知することができる。 [5] In the parking control method of the present embodiment, the third steering control for turning the tire on the vehicle V at the time of start is executed, and the tire moves, so that the person outside the vehicle V can start moving the vehicle V. Can be notified. In remote control parking control, the operator M may be away from the vehicle V to be controlled, and it is difficult to communicate with pedestrians around the vehicle and drivers of other vehicles. Since the vehicle V itself performs a characteristic operation when starting, a pedestrian around the vehicle and a driver of another vehicle can recognize that the vehicle V starts to move.
[6]本実施形態の駐車制御方法によれば、第1状態から移動が開始された第2状態に移行する際に行われる操舵命令による移動方向は駐車経路の方向に沿う。操舵命令における操舵方向は、駐車経路における切り返し地点又は目標駐車スペースに至る方向である。
具体的には、駐車制御開始地点VSにおいては、操舵命令における操舵方向は、切り返し地点VTに至る駐車経路の方向に沿う。操舵命令における操舵方向と、駐車制御開始地点VSから切り返し地点VTに至る方向との差は所定角度未満である。
切り返し地点VTにおいては、操舵命令における操舵方向は、切り返し地点VTから目標駐車スペースVPに至る駐車経路の方向に沿う。操舵命令における操舵方向と、切り返し地点VTから目標駐車スペースVPに至る方向との差は所定角度未満である。
操舵命令の実行後のタイヤの切れ角は、車両Vの移動方向と共通するので、車外の者はタイヤの切れ角を見て、その車両Vの進行方向を推測できる。操舵方向が共通するので、車両Vが動き出すことを車外の者に知らせるために操舵命令を実行しても、駐車経路に沿って移動する車両Vの動きを妨げることがない。加えて、図3(b)に示したように、操舵命令における操舵方向が、駐車経路RTの曲線の旋回方向に沿う場合には、操舵命令の実行により車両Vを旋回させることができるので、駐車経路RTの長さを短くできる。結果として駐車完了までの時間を短縮できる。
[6] According to the parking control method of the present embodiment, the moving direction according to the steering command performed when shifting from the first state to the second state in which movement is started is along the direction of the parking route. The steering direction in the steering command is a direction to a turn-back point in the parking route or a target parking space.
Specifically, at the parking control start point VS, the steering direction in the steering command is along the direction of the parking route leading to the turn-back point VT. The difference between the steering direction in the steering command and the direction from the parking control start point VS to the turn-back point VT is less than a predetermined angle.
At the turning point VT, the steering direction in the steering command is along the direction of the parking route from the turning point VT to the target parking space VP. The difference between the steering direction in the steering command and the direction from the turning point VT to the target parking space VP is less than a predetermined angle.
Since the tire turning angle after execution of the steering command is the same as the moving direction of the vehicle V, a person outside the vehicle can guess the traveling direction of the vehicle V by looking at the tire turning angle. Since the steering direction is common, even if a steering command is executed to notify a person outside the vehicle that the vehicle V starts to move, the movement of the vehicle V moving along the parking route is not hindered. In addition, as shown in FIG. 3B, when the steering direction in the steering command is along the turning direction of the curve of the parking route RT, the vehicle V can be turned by executing the steering command. The length of the parking route RT can be shortened. As a result, the time until parking is completed can be shortened.
[7]本実施形態の駐車制御方法によれば、本実施形態における車両Vが停止している第1状態から移動を開始した第2状態に移行する際に実行される操舵命令において、操舵量はステアリング角として360度以上に相当する量であることが好ましい。ステアリングホイールを一回転(ステアリング角で360度)させると、タイヤの操舵量としては、タイヤ幅の約半分(50%)が車体から出る状態となり、車外の者がタイヤの移動(回転)を確認できる。操舵命令における操舵量がステアリング角として540度以上であることが好ましい。ステアリングホイールを1.5回転させると、タイヤの操舵量として、タイヤ幅の75%程度が車体から出る状態となり、車外の者がタイヤの移動(回転)を確認できる。 [7] According to the parking control method of the present embodiment, in the steering command executed when shifting from the first state in which the vehicle V in the present embodiment is stopped to the second state in which movement is started, the steering amount Is preferably an amount corresponding to a steering angle of 360 degrees or more. When the steering wheel is rotated once (360 degrees in steering angle), about half of the tire width (50%) comes out of the vehicle body as the steering amount of the tire, and the person outside the vehicle confirms the movement (rotation) of the tire it can. The steering amount in the steering command is preferably 540 degrees or more as a steering angle. When the steering wheel is rotated 1.5 times, about 75% of the tire width comes out of the vehicle body as the steering amount of the tire, and a person outside the vehicle can confirm the movement (rotation) of the tire.
[8]本実施形態の駐車制御方法によれば、制御装置10は操舵命令を操舵装置50に実行させる。操舵装置50は、操舵命令に従い、タイヤを転舵し、タイヤを動かす。車外にいる操作者M及び通行人等は、車両Vが移動開始可能であることを知る。特に限定されないが、本実施形態の制御装置10は、この操舵命令の実行後に、車外の操作者Mの実行命令を受け付ける。すなわち、操舵命令が実行された後に、車両Vの外の操作者Mから取得した操作指令に基づいて車両Vの駐車処理を開始させる。車外の操作者Mは、車両Vのタイヤの動きから駐車処理の開始が可能であることを知る。この動きを確認した操作者Mは、再度車両Vの周囲を確認し、リモート操作による実行命令を入力する。他方、車外の通行人(操作者M以外)は、車両Vのタイヤの動きからその車両Vが移動を開始することを知る。操作命令により、操作者Mはリモートコントロールの実行タイミングを知り、他の通行者は車両Vが動き出すタイミングを知ることができる。 [8] According to the parking control method of the present embodiment, the control device 10 causes the steering device 50 to execute a steering command. The steering device 50 steers the tire and moves the tire according to the steering command. The operator M and passers-by who are outside the vehicle know that the vehicle V can start moving. Although not specifically limited, the control apparatus 10 of this embodiment receives the execution command of the operator M outside a vehicle after execution of this steering command. That is, after the steering command is executed, the parking process of the vehicle V is started based on the operation command acquired from the operator M outside the vehicle V. The operator M outside the vehicle knows that the parking process can be started from the movement of the tire of the vehicle V. The operator M confirming this movement confirms the surroundings of the vehicle V again and inputs an execution command by remote operation. On the other hand, a passerby outside the vehicle (other than the operator M) knows that the vehicle V starts to move from the movement of the tire of the vehicle V. By the operation command, the operator M can know the execution timing of the remote control, and other passers-by can know the timing when the vehicle V starts to move.
[9]本実施形態の駐車制御方法が実行される駐車制御装置100においても、上記1から11に記載した作用及び効果を奏する。 [9] The parking control device 100 in which the parking control method of the present embodiment is executed also exhibits the operations and effects described in 1 to 11 above.
なお、以上説明した実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。 The embodiment described above is described for facilitating the understanding of the present invention, and is not described for limiting the present invention. Therefore, each element disclosed in the above embodiment is intended to include all design changes and equivalents belonging to the technical scope of the present invention.
1000…駐車制御システム
100…駐車制御装置
10…制御装置
11…CPU
12…ROM
13…RAM
132…記憶装置
133…地図情報
134…駐車場情報
135…障害物情報
20…入力装置
21…通信装置
30…出力装置
31…ディスプレイ
1a〜1d…カメラ
2…測距装置
3…情報サーバ
31…通信装置
32…記憶装置
33…地図情報
34…駐車場情報
35…障害物情報
5…操作端末
51…通信装置
52…入力装置
53…ディスプレイ
200…車載装置
40…駆動システム
50…操舵装置
50a…操舵角センサ
60…車速センサ
70…車両コントローラ
V…車両
1000 ... Parking control system 100 ... Parking control device 10 ... Control device 11 ... CPU
12 ... ROM
13 ... RAM
132 ...
Claims (9)
前記車両が停止している第1状態から移動が開始された第2状態に移行する際に、前記車両の操舵装置に操舵命令を実行させる駐車制御方法。 A parking control method for moving a parking route to a vehicle and parking the vehicle,
A parking control method for causing a steering command of the vehicle to execute a steering command when shifting from a first state in which the vehicle is stopped to a second state in which movement is started.
前記制御装置は、
前記車両が停止している第1状態から移動が開始された第2状態に移行する際に、前記車両の操舵装置に操舵命令を実行させる駐車制御装置。 A parking control device comprising a control device for executing a control command for moving a parking route to a vehicle and parking the vehicle,
The control device includes:
A parking control device that causes the steering device of the vehicle to execute a steering command when shifting from the first state in which the vehicle is stopped to the second state in which movement is started.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017141089A JP6911607B2 (en) | 2017-07-20 | 2017-07-20 | Parking control method and parking control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017141089A JP6911607B2 (en) | 2017-07-20 | 2017-07-20 | Parking control method and parking control device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019018796A true JP2019018796A (en) | 2019-02-07 |
| JP6911607B2 JP6911607B2 (en) | 2021-07-28 |
Family
ID=65352642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017141089A Active JP6911607B2 (en) | 2017-07-20 | 2017-07-20 | Parking control method and parking control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6911607B2 (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10264839A (en) * | 1997-03-25 | 1998-10-06 | Nissan Motor Co Ltd | Automatic parking device |
| JP3107088B1 (en) * | 1999-09-08 | 2000-11-06 | 株式会社豊田自動織機製作所 | Steering support device for parallel parking |
| JP2001180407A (en) * | 1999-12-28 | 2001-07-03 | Toyota Autom Loom Works Ltd | Steering support device in tandem parking |
| JP2003341543A (en) * | 2002-05-30 | 2003-12-03 | Toyoda Mach Works Ltd | Automatic steering control device |
| JP2006347460A (en) * | 2005-06-17 | 2006-12-28 | Toyota Motor Corp | Travel support device |
| JP2011195092A (en) * | 2010-03-23 | 2011-10-06 | Toyota Motor Corp | Parking support device |
-
2017
- 2017-07-20 JP JP2017141089A patent/JP6911607B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10264839A (en) * | 1997-03-25 | 1998-10-06 | Nissan Motor Co Ltd | Automatic parking device |
| JP3107088B1 (en) * | 1999-09-08 | 2000-11-06 | 株式会社豊田自動織機製作所 | Steering support device for parallel parking |
| JP2001180407A (en) * | 1999-12-28 | 2001-07-03 | Toyota Autom Loom Works Ltd | Steering support device in tandem parking |
| JP2003341543A (en) * | 2002-05-30 | 2003-12-03 | Toyoda Mach Works Ltd | Automatic steering control device |
| JP2006347460A (en) * | 2005-06-17 | 2006-12-28 | Toyota Motor Corp | Travel support device |
| JP2011195092A (en) * | 2010-03-23 | 2011-10-06 | Toyota Motor Corp | Parking support device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6911607B2 (en) | 2021-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6517561B2 (en) | Vehicle control device | |
| JP6493551B2 (en) | Parking support method and parking support device | |
| JP6801787B2 (en) | Parking support method and parking support device | |
| US11305756B2 (en) | Parking control method and parking control apparatus | |
| JP6760499B2 (en) | Parking control method and parking control device | |
| JP6856126B2 (en) | Parking control method and parking control device | |
| US11634118B2 (en) | Parking control method and parking control apparatus | |
| JP4946631B2 (en) | Start support device, display device | |
| KR102170988B1 (en) | Parking control method and parking control device | |
| JP2015516772A (en) | Remote control of automobiles using portable communication devices | |
| US10854084B2 (en) | Parking control method and parking control device | |
| US20210086759A1 (en) | Parking Control Method and Parking Control Apparatus | |
| JP6328217B1 (en) | Automatic parking equipment | |
| JP6852564B2 (en) | Parking control method and parking control device | |
| JP7081148B2 (en) | Parking control method and parking control device | |
| JP7081149B2 (en) | Parking control method and parking control device | |
| JP7020113B2 (en) | Parking control method and parking control device | |
| JP6911607B2 (en) | Parking control method and parking control device | |
| JP6996228B2 (en) | Parking control method and parking control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210608 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210621 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6911607 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |