JP2017204787A - Image processing apparatus, control method thereof, imaging apparatus, and program - Google Patents
Image processing apparatus, control method thereof, imaging apparatus, and program Download PDFInfo
- Publication number
- JP2017204787A JP2017204787A JP2016096445A JP2016096445A JP2017204787A JP 2017204787 A JP2017204787 A JP 2017204787A JP 2016096445 A JP2016096445 A JP 2016096445A JP 2016096445 A JP2016096445 A JP 2016096445A JP 2017204787 A JP2017204787 A JP 2017204787A
- Authority
- JP
- Japan
- Prior art keywords
- image
- detection
- image data
- image processing
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
Description
本発明は、視差画像を用いた画像処理技術に関する。 The present invention relates to an image processing technique using a parallax image.
視差画像を用いた画像処理の応用例にリフォーカス処理がある。視差画像とは、複数の視点から同一の被写体を撮影した、複数の画像である。例えば、レンズやマイクロレンズアレイ、撮像素子等の配置を工夫することで、単一の機材として複数の光学系を含む構成の撮像装置が使用される。特許文献1に開示の撮像装置は、撮影レンズの射出瞳を複数の領域に分割して視差画像を同時に取得可能である。1つのマイクロレンズと複数に分割された光電変換部が形成され、各マイクロレンズを介して撮影レンズの射出瞳の異なる瞳部分領域を通過する光が受光される。それぞれの受光信号から、分割された瞳部分領域に応じた視差画像が生成される。特許文献2では、分割された光電変換部が受光した信号を全て加算して撮像画像を生成することが開示されている。 An application example of image processing using parallax images is refocus processing. The parallax images are a plurality of images obtained by photographing the same subject from a plurality of viewpoints. For example, by devising the arrangement of lenses, microlens arrays, imaging elements, etc., an imaging apparatus having a configuration including a plurality of optical systems as a single piece of equipment is used. The imaging device disclosed in Patent Literature 1 can simultaneously obtain a parallax image by dividing the exit pupil of the photographing lens into a plurality of regions. One microlens and a plurality of divided photoelectric conversion units are formed, and light passing through different pupil partial areas of the exit pupil of the photographing lens is received through each microlens. A parallax image corresponding to the divided pupil partial region is generated from each light reception signal. Patent Document 2 discloses that a picked-up image is generated by adding all signals received by the divided photoelectric conversion units.
撮影された視差画像は、光強度の空間分布および角度分布情報であるライトフィールド(Light Field)データと等価である。またリフォーカス処理は、撮影された視差画像の読み込み直後に行われる場合が多い。リフォーカス画像が生成された後の画像処理では通常の画像と同等の処理を行うことが一般的である。 The captured parallax image is equivalent to light field (Light Field) data, which is spatial distribution and angle distribution information of light intensity. In many cases, the refocus processing is performed immediately after the captured parallax image is read. In image processing after the refocus image is generated, it is common to perform processing equivalent to a normal image.
一方、リフォーカス技術や視差画像に関する利用方法の1つとして、前ボケ補正と呼ばれる補正がある。同一の被写体を複数の視点で撮影した場合に、合焦していない手前の被写体の位置が視差画像ごとに異なる場合がある。この場合、主被写体との位置関係によって、どの視差画像を使うかをユーザ操作により選択できる機能が提案されている。手前の被写体が前ボケと呼ばれる状態であるために、前ボケ補正と呼ばれる。ユーザは視差画像を入力として最適な補正量を設定する。補正量は、入力された視差画像に対してウェイトを設定する量(重み付け量)のことである。設定されたウェイトを用いて、最終的な画像を合成することで、連続的に前ボケの位置を調整することができる。 On the other hand, as one of the utilization methods related to the refocus technique and the parallax image, there is a correction referred to as a previous blur correction. When the same subject is photographed from a plurality of viewpoints, the position of the subject that is not in focus may be different for each parallax image. In this case, a function has been proposed that allows a user operation to select which parallax image to use depending on the positional relationship with the main subject. This is called front blur correction because the subject in front is called front blur. The user sets an optimal correction amount using the parallax image as an input. The correction amount is an amount (weighting amount) for setting a weight for the input parallax image. By combining the final image using the set weight, it is possible to continuously adjust the position of the previous blur.
ところで視差画像を扱うシステムでは、既存の単一の画像を扱うシステムとの互換性を重視することが多い。単一の画像とは、単一の視点で撮影された画像(以下、単一画像ともいう)のことである。視差画像の形式が、単一画像と同様のフォーマットで提供される場合、視差画像の合成結果も同じフォーマットの画像である。よって、その後の画像処理を共通の処理として行える。つまり、同じ画像処理を利用し、視差画像の場合に画像合成が行われ、合成結果を単一画像と同等に扱うことで、視差画像でも単一画像でも同様の画像出力が得られるようにシステムを設計できる。単一画像のみを扱うシステムを拡張しつつ、視差画像やリフォーカス技術を利用できるという点で、実用上のメリットが大きい。 By the way, a system that handles parallax images often places importance on compatibility with an existing system that handles a single image. A single image is an image taken from a single viewpoint (hereinafter also referred to as a single image). When the parallax image format is provided in the same format as the single image, the synthesis result of the parallax images is also an image in the same format. Therefore, subsequent image processing can be performed as common processing. In other words, a system that uses the same image processing, performs image composition in the case of parallax images, and treats the result of synthesis equivalent to a single image, so that the same image output can be obtained for both parallax images and single images. Can be designed. There is a great practical advantage in that a system that handles only a single image can be expanded while using parallax images and refocusing technology.
視差画像を扱う前ボケ補正における課題は、顔検出等の検出に関する処理にある。通常の画像処理では被写体の顔等を検出し、その検出結果に応じてゲイン等を変化させる処理が実行される。例えば検出された被写体の顔の画像領域が適正な明るさとなるように全体の明るさを含めて調整処理が行われる。この場合、顔が検出されたかどうかによって、出力結果は大きく異なる。視差画像に対して、既存の画像処理と共通する処理を行う場合には、視差画像を合成した結果(合成画像)に対して顔検出が行われ、検出結果を用いて画像処理が実行される。調整結果によって合成結果が異なるので、顔検出結果が異なる可能性がある。つまり同じ視差画像が入力されたとしても、ユーザが連続的に合成比率を調整する過程で、出力結果が大きく異なる可能性がある。具体的には、同じ画像に対してユーザが操作により前ボケの位置を意識しながら調整している際に、ある調整値を境にして全体の明るさが大きく変わることが起こり得る。これでは、自然でかつユーザが意図した調整結果からかけ離れた画像になってしまう。 A problem in blur correction before handling a parallax image lies in processing relating to detection such as face detection. In normal image processing, processing such as detecting the face of a subject and changing the gain or the like according to the detection result is executed. For example, the adjustment process including the overall brightness is performed so that the detected image area of the face of the subject has an appropriate brightness. In this case, the output result varies greatly depending on whether or not a face is detected. When performing processing that is common to existing image processing on a parallax image, face detection is performed on the result of synthesizing the parallax image (synthesized image), and image processing is executed using the detection result. . Since the synthesis result differs depending on the adjustment result, the face detection result may be different. That is, even if the same parallax image is input, the output result may be greatly different in the process of the user continuously adjusting the composition ratio. Specifically, when the user adjusts the same image while being aware of the position of the previous blur by an operation, the overall brightness may change greatly with a certain adjustment value as a boundary. This results in an image that is natural and far from the adjustment result intended by the user.
本発明の目的は、視点の異なる複数の画像に対する検出処理を実行可能な画像処理装置を提供することである。 An object of the present invention is to provide an image processing apparatus capable of executing detection processing for a plurality of images having different viewpoints.
本発明の一実施形態に係る画像処理装置は、異なる視点で撮影された複数の第1の画像データと第2の画像データを取得する取得手段と、取得された前記複数の第1の画像データを合成する合成手段と、前記第1および第2の画像データに対する検出処理を行う検出手段と、前記検出手段から検出結果を取得し、前記合成手段により合成された画像データ、および前記第2の画像データに画像処理を行う画像処理手段と、を備える。前記検出手段は、前記第1の画像データが取得された場合、前記合成手段が合成する前の前記第1の画像データに対して第1の検出処理を行い、当該第1の検出処理の検出結果を前記画像処理手段に出力し、前記第2の画像データが取得された場合、前記画像処理手段が画像処理を行う前の前記第2の画像データに対して第2の検出処理を行い、当該第2の検出処理の検出結果を前記画像処理手段に出力する。 An image processing apparatus according to an embodiment of the present invention includes an acquisition unit that acquires a plurality of first image data and second image data captured from different viewpoints, and the acquired plurality of first image data. Synthesizing means for synthesizing, detection means for performing detection processing on the first and second image data, detection results from the detecting means, and image data synthesized by the synthesizing means, and the second Image processing means for performing image processing on the image data. When the first image data is acquired, the detection means performs a first detection process on the first image data before being synthesized by the synthesis means, and detects the first detection process. When the result is output to the image processing means and the second image data is acquired, the image processing means performs a second detection process on the second image data before performing the image processing, The detection result of the second detection process is output to the image processing means.
本発明によれば、視点の異なる複数の画像に対する検出処理を実行可能な画像処理装置を提供することができる。 ADVANTAGE OF THE INVENTION According to this invention, the image processing apparatus which can perform the detection process with respect to several images from which a viewpoint differs can be provided.
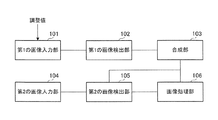
以下、本発明の実施形態について、代表的な例を説明する。図1は本発明の実施形態に係る画像処理装置の構成例を示すブロック図である。 Hereinafter, representative examples of the embodiments of the present invention will be described. FIG. 1 is a block diagram illustrating a configuration example of an image processing apparatus according to an embodiment of the present invention.
画像処理装置は、外部装置または撮像部等から視差画像を入力する第1の画像入力部101を備える。例えば、撮像装置の場合、撮像部から複数の視差画像信号を取得可能である。視差画像は、複数の画像間で視差がある画像であり、異なる視点で撮影された画像である。本明細書では、ある視点で撮影された画像を「視点画像」と呼ぶ。複数の視点画像により、視差画像が構成される。具体的には、撮像素子は複数のマイクロレンズと、各マイクロレンズに対応する複数に分割された光電変換部を備える。撮影レンズの射出瞳の異なる瞳部分領域を通過する光は、各マイクロレンズを介して複数の光電変換部がそれぞれ受光して電気信号に光電変換する。これにより、複数の瞳部分領域に応じた光電変換部の各出力から複数の視点画像が生成され、第1の画像入力部101に入力される。例えば第1の光電変換部の出力から第1の視点画像が取得され、第2の光電変換部の出力から第2の視点画像が取得される。第1の画像検出部102は、入力された複数の視点画像に対して検出処理を行う。合成部103は、入力された複数の視点画像をユーザ操作により設定される調整値に応じて合成する。
The image processing apparatus includes a first
第2の画像入力部104には、単一画像が入力される。単一画像は、単一の視点で撮影された視点画像である。例えば、撮像装置の場合、撮像部を構成する撮像素子の光電変換部から出力される画像を取得可能である。瞳分割型撮像素子の場合、分割された複数の光電変換部の各出力を加算により合成した出力から画像データを取得できる。具体的には、1つのマイクロレンズに対して2つの光電変換部が対応する構成を備える撮像素子を想定する。この場合、第1の光電変換部が出力する第1の像(A像)の出力信号と、第2の光電変換部が出力する第2の像(B像)の出力信号から、加算画像(A+B像)の出力信号が得られる。加算画像(A+B像)は、A像の信号から取得される画像およびB像の信号から取得される画像に対して、異なる視点をもつ合成画像である。つまり、A+B像は、A像とB像に対して視差を有する像であるが、単独で処理の対象とする場合には、単一画像の場合と同等とみなす。本実施形態では、撮像部にて合成された画像と、合成部103により合成された画像を区別して検出処理が行われる。
A single image is input to the second
第2の画像検出部105は、入力された画像、または合成部103による合成結果(合成画像)に対して検出処理を行う。画像処理部106は、第1の画像検出部102と第2の画像検出部105の検出結果を用いて所定の画像処理を行う。なお、画像処理装置には各部の制御を行うシステム制御部(プログラムを実行するCPU等)や操作部、用途に応じた公知の回路部等が設けられるが、それらの詳細な説明は省略する。以下、各構成部の機能について順に説明する。
The second
まず、第1の画像入力部101は視差画像を構成する複数の視点画像を取得する。例えば視点画像はベイヤ配列のデータ構成とし、2枚の画像からユーザが入力した調整値に対応する合成比率を加味し、合成することで前ボケ補正が実現される。なお、画像生成方法については特定の方法に限定されない。一般的な撮像光学系を持つ一眼レフカメラ等を複数組み合わせて撮影を行う方法や、複数の撮像光学系を含む単一の装置により撮影を行う方法では、複数の視点画像を同時に取得可能である。
First, the first
図2を参照して、視点画像の入力処理について説明する。まず、第1の画像入力部101には2枚の視点画像のデータが入力される(S201)。第1の視点画像Aのデータが読み込まれ、メモリ上に展開される(S202)。次に第2の視点画像Bの画像データが読み込まれ、メモリ上に展開される(S203)。ユーザ操作に応じた調整値が取得される(S204)。この調整値は合成比率を示す値であり、ユーザがUI(ユーザ・インターフェース)画面等で調整操作を行った結果である。ユーザの操作指示を受け付ける操作部およびUI画面については図8を用いて後述する。 The viewpoint image input process will be described with reference to FIG. First, data of two viewpoint images are input to the first image input unit 101 (S201). Data of the first viewpoint image A is read and developed on the memory (S202). Next, the image data of the second viewpoint image B is read and developed on the memory (S203). An adjustment value corresponding to the user operation is acquired (S204). This adjustment value is a value indicating the composition ratio, and is a result of the user performing an adjustment operation on a UI (user interface) screen or the like. An operation unit and a UI screen that receive user operation instructions will be described later with reference to FIG.
次に、第1の画像検出部102は、入力された複数の視点画像に対して検出処理を行う。図3を参照して、複数の視点画像に対する検出処理について説明する。第1の画像検出部102は複数の視点画像を読み込み(S301)、視点画像に対して検出を行うのか、合成部103が合成した後の画像に対して検出を行うのかを判定する(S302)。この判定は設定値に基づいて行われる。判定の結果、複数の視点画像に対して検出を行うことが判定された場合、S303に処理を進める。合成部103による合成後に検出を行うことが判定された場合には処理を終了する。
Next, the first
S303で第1の画像検出部102は、第1の視点画像Aに対する検出処理を行い、S304では、第2の視点画像Bに対する検出処理を行う。複数の検出処理が実行され、検出項目に応じて検出の段階が異なる。本実施形態では顔検出を例示して説明する。画像内に被写体の顔が存在する場合、顔の領域の明るさが適正な露出となるように全体の明るさを調整する機能を想定する。この場合には、視点画像に対して顔検出を行う設定が予め行われる。設定値に従って、顔検出処理が行われる。この他には、例えば、画像内のゴミ(不要な画像部分)を検出し、周辺画素を用いて補間して除去する処理がある。不要な画像部分は、当該部分の輝度または色相と、その周辺領域における輝度または色相との差が閾値以上である部分として検出することができる。この場合、第1の画像検出部102は、視点画像に対してではなく、合成部103による合成後の画像に対して行う方が適切であると判断する。合成後に検出処理を行う設定が予め行われる。
In S303, the first
第1の画像検出部102は各視点画像に対して検出処理を行った後、複数の検出結果を1つの検出結果に合成する(S305)。本実施形態では顔検出を行うため、検出された領域のOR(論理和)演算が行われ、各視点画像のどちらかで顔画像が検出された場合に、顔画像が検出されたものとする。合成された検出結果については、以降の画像処理において利用するため、メモリに一時的に保存される(S306)。
The first
次に、合成部103は複数の視点画像を合成する。合成については、重み付きの一般的な合成アルゴリズムに従う処理を視点画像に施すこととする。図4を参照して、複数の視点画像に対する合成処理について説明する。
Next, the
合成部103には2枚の視点画像が入力される(S401)。合成部103はユーザの操作により指定された調整値を読み込む(S402)。調整値は図2のS204で取得済みであり、メモリから読み出される。そして、各視点画像に対する調整値に応じた合成比率を乗算してから加算する処理により、重み付け加算処理が行われる(S403)。設定された領域および調整値を反映した合成画像が生成される。合成部103は合成画像を出力する。
Two viewpoint images are input to the combining unit 103 (S401). The synthesizing
前ボケ補正を例にすると、ユーザは複数の視点画像に対して、最適な調整値を設定する。この調整値に対応する前ボケ補正量は、入力された各視点画像に対する重み付け量である。合成部103は重み付け量から合成比率を決定し、加重加算処理を実行することにより合成画像を生成する。これにより、ユーザが入力した調整値に基づいて画像の前ボケの位置が調整され、ユーザが所望する画像を得ることができる。
Taking the previous blur correction as an example, the user sets optimal adjustment values for a plurality of viewpoint images. The previous blur correction amount corresponding to this adjustment value is a weighting amount for each input viewpoint image. The
次に単一画像の処理について説明する。単一画像や撮像素子にて合成されて取得される合成画像の場合、第2の画像入力部104は画像データを読み込む。図5のS501は、画像データの読み込み処理を示す。読み込まれた画像データは、第2の画像検出部105に出力されて処理される。
Next, processing of a single image will be described. In the case of a single image or a composite image obtained by combining with an image sensor, the second
第2の画像検出部105は、合成部103による合成画像または第2の画像入力部104からの画像に対して検出処理を行う。図6を参照して検出処理について説明する。第2の画像検出部105は対象となる画像データを読み込み(S601)、合成部103が合成した合成画像であるかどうかを判断する(S602)。対象となる画像が、合成部103による合成画像である場合、S603に進み、合成部103による合成画像でない場合にはS604に移行する。
The second
第2の画像検出部105は、検出対象の画像であるかどうかをチェックする(S603)。検出対象の画像であることが判定された場合、S604に進み、検出処理が行われる。ただし、合成部103による合成画像の場合には、予め設定された内容によってはすでに第1の画像検出部102が検出処理(顔検出等)を完了している場合もある。その場合には検出処理は行わない。これは項目ごとに異なるため、第1の画像検出部102の場合と同様に第2の画像検出部105は設定値に基づいて検出処理を行う。顔検出処理は第1の画像検出部102により行われるが、例えば画像のゴミ除去用検出処理については第2の画像検出部105が行う設定になっている場合を想定する。この場合、ゴミ除去用検出処理はS604のタイミングで実行される。第2の画像検出部105は検出処理を行った場合、検出結果を画像処理で利用するためにメモリに保存する(S605)。
The second
画像処理部106は検出結果を用いた画像処理を行う。図7を参照して、画像処理について説明する。まず、画像処理部106は画像データを読み込む(S701)。次に、画像処理部106は第1の画像検出部102により検出された検出結果もしくは第2の画像検出部105により検出された検出結果または両方の検出結果を読み込む(S702)。画像処理部106は入力された画像データおよび検出結果に基づいて画像処理を行う(S703)。画像処理部106は処理した画像データを出力する(S704)。出力された画像は、例えば表示装置の画面に表示され、または記録媒体に記録される。
The
本実施形態では、顔検出とゴミ除去処理を例示して、それぞれについて簡単に説明を行う。顔検出の処理では、画像内に1つまたは複数の顔が検出された顔領域の情報が検出結果として画像処理部106に入力される。画像処理部106は検出された顔領域の平均輝度を算出し、平均輝度が所定範囲内でない場合にはプラスもしくはマイナスのゲインを画像全体にかける。つまり、ゲイン調整により、顔領域が適正露出とされる範囲内に収まるように明るさを変更する処理が行われる。例えば、適正露出の範囲が8bit相当で100から140の設定であるとし、算出された顔領域の平均輝度が50であった場合を例にする。画像処理部106はゲインを画像全体に2倍かけることで、顔領域の平均輝度を100に調整する。これにより、顔領域の平均輝度を設定範囲内にすることができる。これは、例えば逆光で撮影された画像において顔が極端に暗い場合等に、自動で補正することが可能な処理である。
In the present embodiment, face detection and dust removal processing will be exemplified and will be briefly described. In the face detection process, information on a face area in which one or more faces are detected in the image is input to the
画像のゴミ除去処理において、画像処理部106は画像内の画素値が閾値以下の黒い点を検出する。厳密には、極端に周辺画素と色相や輝度が異なる点が検出され、例えば半径2画素以下の点が検出されるものとする。検出結果は1つまたは複数のゴミ(画像部分)の中心位置と半径の情報である。画像処理部106はそれぞれのゴミに対して、周辺の画素から補間してゴミの領域を置き換えることで、画像のゴミを除去する。これにより、撮像素子上に残ったゴミ等が画像に写り込んでしまった場合に、自動で検出して除去することができる。画像処理部106は、このような検出結果を用いた画像処理を行った上で、処理結果である画像を出力する(S704)。
In the image dust removal process, the
以上のように本実施形態では、画像データに対する検出処理において2つのモードで検出が行われる。第1のモードでの検出処理にて第1の画像検出部102は、複数の視点画像のデータを合成部103が合成する場合に、合成前の画像データに対して検出処理(例えば、顔検出)を実行する。また、第2のモードでの検出処理にて第2の画像検出部105は、以下の処理を実行する。
・単一の視点画像データに対する検出処理(例えば、顔検出とゴミ画像部分の検出)
・合成部103が合成した画像データに対する検出処理(例えば、ゴミ画像部分の検出)。
検出結果は、モードに応じて画像処理部106に送られる。よって画像データの検出処理のタイミングを、検出項目に応じて個別に設定することができる。
As described above, in this embodiment, detection is performed in two modes in the detection process for image data. In the detection processing in the first mode, the first
-Detection processing for single viewpoint image data (for example, face detection and dust image portion detection)
A detection process for the image data synthesized by the synthesis unit 103 (for example, detection of a dust image portion).
The detection result is sent to the
図8は、ユーザが合成比率を調整する際の、前ボケ補正用UI画面を例示する。複数の視点画像の調整操作を、単一画像を扱うUI画面中で行う実施形態もあるが、本実施形態では、ユーザが専用のUI画面を見ながら視点画像の調整操作を行う例を示す。まず、視点画像データの読み込みが行われ、表示部にはダイアログ画面801が表示される。ダイアログ画面801には、キャンセル用のボタン803、拡大表示領域802、サムネイル表示領域804、調整スライダー805、保存ボタン806が配置されている。ユーザはタッチパネルによるタッチ操作、マウス等のポインティングデバイスやキーボードを用いた入力操作によって所望の調整を行う。操作部によりユーザが指示した調整値のデータはメモリに保存され、画像の前ボケ補正時に使用される。
FIG. 8 illustrates a front blur correction UI screen when the user adjusts the composition ratio. Although there is an embodiment in which a plurality of viewpoint images are adjusted on a UI screen that handles a single image, this embodiment shows an example in which a user performs a viewpoint image adjustment operation while viewing a dedicated UI screen. First, the viewpoint image data is read, and a
本実施形態では、複数の視点画像データに対する検出処理と、単一の視点画像データおよび合成された画像データに対する検出処理とを、予め設定されたタイミングで実行可能である。本実施形態によれば、視差を有する複数の視点画像および単一の視点画像の画像処理が可能なシステムにおいて、複数の視点画像の合成比率を調整し、ユーザの意図した出力結果を得ることができる。 In the present embodiment, detection processing for a plurality of viewpoint image data and detection processing for single viewpoint image data and synthesized image data can be executed at a preset timing. According to the present embodiment, in a system capable of image processing of a plurality of viewpoint images having a parallax and a single viewpoint image, it is possible to adjust a synthesis ratio of the plurality of viewpoint images and obtain an output result intended by the user. it can.
[その他の実施形態]
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
[Other Embodiments]
The present invention supplies a program that realizes one or more functions of the above-described embodiments to a system or apparatus via a network or a storage medium, and one or more processors in a computer of the system or apparatus read and execute the program This process can be realized. It can also be realized by a circuit (for example, ASIC) that realizes one or more functions.
101 第1の画像入力部
102 第1の画像検出部
103 合成部
104 第2の画像入力部
105 第2の画像検出部
106 画像処理部
DESCRIPTION OF
Claims (14)
取得された前記複数の第1の画像データを合成する合成手段と、
前記第1および第2の画像データに対する検出処理を行う検出手段と、
前記検出手段から検出結果を取得し、前記合成手段により合成された画像データ、および前記第2の画像データに画像処理を行う画像処理手段と、を備え、
前記検出手段は、
前記第1の画像データが取得された場合、前記合成手段が合成する前の前記第1の画像データに対して第1の検出処理を行い、当該第1の検出処理の検出結果を前記画像処理手段に出力し、
前記第2の画像データが取得された場合、前記画像処理手段が画像処理を行う前の前記第2の画像データに対して第2の検出処理を行い、当該第2の検出処理の検出結果を前記画像処理手段に出力することを特徴とする画像処理装置。 Obtaining means for obtaining a plurality of first image data and second image data taken from different viewpoints;
Combining means for combining the plurality of acquired first image data;
Detection means for performing detection processing on the first and second image data;
An image processing unit that obtains a detection result from the detection unit and performs image processing on the image data combined by the combining unit and the second image data;
The detection means includes
When the first image data is acquired, a first detection process is performed on the first image data before being synthesized by the synthesis unit, and a detection result of the first detection process is used as the image process. Output to the means,
When the second image data is acquired, a second detection process is performed on the second image data before the image processing unit performs the image process, and a detection result of the second detection process is obtained. An image processing apparatus that outputs to the image processing means.
取得された前記複数の第1の画像データを合成する合成手段と、
前記複数の第1の画像データに対して前記合成手段が合成を行う第1のモードでの検出処理、および前記第2の画像データに対して行う第2のモードでの検出処理を実行する検出手段と、
前記検出手段から検出結果を取得して前記合成手段により合成された画像データ、および前記第2の画像データに画像処理を行う画像処理手段と、を備え、
前記検出手段は、
前記第1のモードにて、前記合成手段が合成する前の前記第1の画像データに対して第1の検出処理を行い、当該第1の検出処理の検出結果を前記画像処理手段に出力し、
前記第2のモードにて、前記画像処理手段が画像処理を行う前の前記第2の画像データに対して第2の検出処理を行い、当該第2の検出処理の検出結果を前記画像処理手段に出力することを特徴とする画像処理装置。 Obtaining means for obtaining a plurality of first image data and second image data taken from different viewpoints;
Combining means for combining the plurality of acquired first image data;
Detection for executing detection processing in the first mode in which the combining unit combines the plurality of first image data, and detection processing in the second mode performed on the second image data Means,
Image data obtained by obtaining detection results from the detection means and synthesized by the synthesis means, and image processing means for performing image processing on the second image data,
The detection means includes
In the first mode, a first detection process is performed on the first image data before being synthesized by the synthesizing unit, and a detection result of the first detection process is output to the image processing unit. ,
In the second mode, the second detection process is performed on the second image data before the image processing unit performs the image processing, and the detection result of the second detection process is used as the image processing unit. An image processing apparatus that outputs to
撮像素子から出力される前記複数の第1の画像データを取得する第1の取得手段と、
前記撮像素子にて合成が行われた前記第2の画像データを取得する第2の取得手段と、を備えることを特徴とする請求項1または請求項2に記載の画像処理装置。 The acquisition means includes
First acquisition means for acquiring the plurality of first image data output from the image sensor;
The image processing apparatus according to claim 1, further comprising: a second acquisition unit configured to acquire the second image data synthesized by the image sensor.
前記画像処理手段は、前記第1および第2の検出処理の検出結果を取得して前記合成手段により合成された画像データに画像処理を行うことを特徴とする請求項1から3のいずれか1項に記載の画像処理装置。 When the detection unit performs the second detection process on the image data combined by the combination unit, the detection unit outputs a detection result of the second detection process to the image processing unit,
4. The image processing unit according to claim 1, wherein the image processing unit acquires the detection results of the first and second detection processes and performs image processing on the image data combined by the combining unit. The image processing apparatus according to item.
前記合成手段は、前記調整値から前記複数の第1の画像データに対する合成比率を決定して合成された画像データを生成することを特徴とする請求項1から4のいずれか1項に記載の画像処理装置。 An operation unit that receives an input of an adjustment value used when the combining unit combines the images;
The said synthetic | combination means determines the synthetic | combination ratio with respect to a said some 1st image data from the said adjustment value, and produces | generates the image data synthesized | combined. Image processing device.
前記画像処理手段は、前記検出手段により検出された前記画像部分の画素値を、その周辺領域の画素値を用いて補間して置き換える処理を行うことを特徴とする請求項1から8のいずれか1項に記載の画像処理装置。 The detection means detects an image portion in which a difference in luminance or hue between a region to be detected in the image and its surrounding region is equal to or greater than a threshold,
9. The image processing unit according to claim 1, wherein the image processing unit performs a process of interpolating and replacing a pixel value of the image portion detected by the detection unit using a pixel value of a surrounding area. The image processing apparatus according to item 1.
前記取得手段は、前記複数の光電変換部がそれぞれ出力する信号から前記複数の第1の画像データを取得し、前記複数の光電変換部がそれぞれ出力する信号を合成した信号から前記第2の画像データを取得することを特徴とする請求項10に記載の撮像装置。 An image sensor having a plurality of microlenses and a plurality of photoelectric conversion units corresponding to each microlens,
The acquisition unit acquires the plurality of first image data from signals output from the plurality of photoelectric conversion units, and combines the signals output from the plurality of photoelectric conversion units from the second image. Data is acquired, The imaging device of Claim 10 characterized by the above-mentioned.
検出手段が取得された前記第1および第2の画像データに対する検出処理を行う検出工程と、
合成手段が取得された前記複数の第1の画像データを合成する合成工程と、
画像処理手段が前記検出手段から検出結果を取得し、前記合成手段により合成された画像データ、および前記第2の画像データに画像処理を行う画像処理工程と、を有し、
前記検出工程にて、
前記第1の画像データが取得された場合、前記検出手段は前記合成手段が合成する前の前記第1の画像データに対して第1の検出処理を行い、当該第1の検出処理の検出結果を前記画像処理手段に出力し、
前記第2の画像データが取得された場合、前記検出手段は前記画像処理手段が画像処理を行う前の前記第2の画像データに対して第2の検出処理を行い、当該第2の検出処理の検出結果を前記画像処理手段に出力することを特徴とする画像処理装置の制御方法。 A control method executed by an image processing apparatus that acquires a plurality of first image data and second image data captured from different viewpoints and performs image processing,
A detection step of performing detection processing on the first and second image data obtained by the detection means;
A combining step of combining the plurality of first image data obtained by the combining unit;
An image processing unit that obtains a detection result from the detection unit and performs image processing on the image data combined by the combining unit and the second image data; and
In the detection step,
When the first image data is acquired, the detection unit performs a first detection process on the first image data before being synthesized by the synthesis unit, and a detection result of the first detection process. Is output to the image processing means,
When the second image data is acquired, the detection unit performs a second detection process on the second image data before the image processing unit performs image processing, and the second detection process. A detection method for outputting an image processing device to the image processing means.
検出手段が、取得された前記複数の第1の画像データに対して合成手段が合成を行う第1のモードでの検出処理、および前記第2の画像データに対して行う第2のモードでの検出処理を実行する検出工程と、
前記合成手段が、取得された前記複数の第1の画像データを合成する合成工程と、
画像処理手段が、前記検出手段から検出結果を取得して前記合成手段により合成された画像データ、および前記第2の画像データに画像処理を行う画像処理工程と、を有し、
前記検出工程の前記第1のモードにて、前記検出手段は前記合成手段が合成する前の前記第1の画像データに対して第1の検出処理を行い、当該第1の検出処理の検出結果を前記画像処理手段に出力し、
前記検出工程の前記第2のモードにて、前記検出手段は前記画像処理手段が画像処理を行う前の前記第2の画像データに対して第2の検出処理を行い、当該第2の検出処理の検出結果を前記画像処理手段に出力することを特徴とする画像処理装置の制御方法。 A control method executed by an image processing apparatus that acquires a plurality of first image data and second image data captured from different viewpoints and performs image processing,
In the detection mode in the first mode in which the detection unit combines the acquired plurality of first image data with the combination unit, and in the second mode to be performed on the second image data A detection process for executing the detection process;
A combining step in which the combining means combines the plurality of acquired first image data;
An image processing unit having an image processing step of obtaining a detection result from the detection unit and performing image processing on the image data combined by the combining unit and the second image data;
In the first mode of the detection step, the detection means performs a first detection process on the first image data before being synthesized by the synthesis means, and a detection result of the first detection process Is output to the image processing means,
In the second mode of the detection step, the detection means performs a second detection process on the second image data before the image processing means performs image processing, and the second detection process. A detection method for outputting an image processing device to the image processing means.
A program for causing a computer of an image processing apparatus to execute each step according to claim 12 or 13.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016096445A JP2017204787A (en) | 2016-05-12 | 2016-05-12 | Image processing apparatus, control method thereof, imaging apparatus, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016096445A JP2017204787A (en) | 2016-05-12 | 2016-05-12 | Image processing apparatus, control method thereof, imaging apparatus, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017204787A true JP2017204787A (en) | 2017-11-16 |
Family
ID=60322455
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016096445A Pending JP2017204787A (en) | 2016-05-12 | 2016-05-12 | Image processing apparatus, control method thereof, imaging apparatus, and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017204787A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220073021A (en) * | 2020-11-26 | 2022-06-03 | (주)비퍼플 | Chip for face recognition based on heterogeneous sensors and face recognition device using the same |
| KR20220073020A (en) * | 2020-11-26 | 2022-06-03 | (주)비퍼플 | Face recognition device and method based on Artificial Intelligence |
-
2016
- 2016-05-12 JP JP2016096445A patent/JP2017204787A/en active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220073021A (en) * | 2020-11-26 | 2022-06-03 | (주)비퍼플 | Chip for face recognition based on heterogeneous sensors and face recognition device using the same |
| KR20220073020A (en) * | 2020-11-26 | 2022-06-03 | (주)비퍼플 | Face recognition device and method based on Artificial Intelligence |
| KR102588696B1 (en) * | 2020-11-26 | 2023-10-12 | (주)비퍼플 | Chip for face recognition based on heterogeneous sensors and face recognition device using the same |
| KR102588697B1 (en) * | 2020-11-26 | 2023-10-12 | (주)비퍼플 | Face recognition device and method based on Artificial Intelligence |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101396743B1 (en) | An image processing device, an image processing method, and a recording medium | |
| US8576288B2 (en) | Image processing unit, image processing method, and image processing program | |
| WO2021047345A1 (en) | Image noise reduction method and apparatus, and storage medium and electronic device | |
| US10002436B2 (en) | Image processing device, image processing method, and solid-state imaging device | |
| US20180338096A1 (en) | Image processing appartatus | |
| JP6720881B2 (en) | Image processing apparatus and image processing method | |
| JP2014123809A (en) | Imaging apparatus, imaging system, and imaging apparatus control method | |
| JP6752681B2 (en) | Display control device, control method and program of display control device, and storage medium | |
| CN111225135B (en) | Image sensor, imaging device, electronic apparatus, image processing system, and signal processing method | |
| US20130083169A1 (en) | Image capturing apparatus, image processing apparatus, image processing method and program | |
| US10116865B2 (en) | Image processing apparatus and image processing method for calculating motion vector between images with different in-focus positions | |
| WO2019124289A1 (en) | Device, control method, and storage medium | |
| JP2017204787A (en) | Image processing apparatus, control method thereof, imaging apparatus, and program | |
| US11032463B2 (en) | Image capture apparatus and control method thereof | |
| JP2021097347A (en) | Imaging apparatus, control method of the same, and program | |
| US11323689B2 (en) | Image processing device, imaging device, image processing method, and recording medium | |
| JP7183015B2 (en) | Image processing device, image processing method, and program | |
| JP6856999B2 (en) | Image processing equipment, image processing methods and programs | |
| JP6245847B2 (en) | Image processing apparatus and image processing method | |
| JP2016208118A (en) | Image processing apparatus, image processing method, and program | |
| US10880508B2 (en) | Image processing apparatus, imaging apparatus, pixel-abnormality detecting method, and computer-readable recording medium | |
| JP4687619B2 (en) | Image processing apparatus, image processing method, and program | |
| US20230196517A1 (en) | Information processing apparatus, control method of information processing apparatus, and non-transitory computer readable medium | |
| US11696040B2 (en) | Image processing apparatus that retouches and displays picked-up image, image processing method, and storage medium | |
| JP7271316B2 (en) | Imaging device and its control method |