JP2013082016A - Food bar cutting device - Google Patents
Food bar cutting device Download PDFInfo
- Publication number
- JP2013082016A JP2013082016A JP2011221836A JP2011221836A JP2013082016A JP 2013082016 A JP2013082016 A JP 2013082016A JP 2011221836 A JP2011221836 A JP 2011221836A JP 2011221836 A JP2011221836 A JP 2011221836A JP 2013082016 A JP2013082016 A JP 2013082016A
- Authority
- JP
- Japan
- Prior art keywords
- food
- feed amount
- rotary blade
- cutting
- log
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Abstract
Description
本発明は、例えば棒状ハムなどの食品原木を切断して食品片を得る食品原木切断装置に関するものである。 The present invention relates to a food log cutting device that cuts a food log such as a stick-shaped ham to obtain a food piece.
従来、この種の食品原木切断装置としては、公転盤に取り付けられて自転する回転刃により食品原木をスライスし、スライスしたハムの重量を計量機で検出するようにハムスライサが知られている。このようなハムスライサの場合、一般的に公転盤の公転速度は300〜500rpm程度であり、回転刃の自転速度は公転速度の5倍程度の1500rpm程度である。このハムスライサを用いて製造される通常のスライスハムの場合、ハム原木をスライスして得た厚さ1〜2mm程度のスライスハム4〜5枚を一つのパックに包装している。このパックは、一般的に一定の重量で一定の単価で販売される、いわゆる定貫商品と言われている。このような定貫商品において、例えばスライスハム5枚入り100gで1パックの商品の場合、ハムスライサは5枚で100gを下回らないようにスライスしなければならないので、一般に102〜107gを重量目標値としてスライスされる。この場合、ハム原木の長さ方向の断面積が一定である事や、ハム質例えば比重の異なる脂肪と赤身の比率に大きなムラが無い事が満たされていれば目標範囲内に収めやすいが、これらの条件を満たすことは現実的に難しい。 Conventionally, as this kind of raw food cutting apparatus, a ham slicer has been known in which a raw food slice is sliced by a rotating blade attached to a turning board and rotates, and the weight of the sliced ham is detected by a weighing machine. In the case of such a ham slicer, the revolution speed of the revolution board is generally about 300 to 500 rpm, and the rotation speed of the rotary blade is about 1500 rpm, which is about five times the revolution speed. In the case of ordinary sliced ham produced using this ham slicer, 4 to 5 sliced hams having a thickness of about 1 to 2 mm obtained by slicing raw ham wood are packaged in one pack. This pack is generally said to be a so-called fixed product that is sold at a constant weight and a constant unit price. In such a regular product, for example, in the case of 100g containing 5 slices of ham and 1 pack product, the ham slicer must be sliced so that it does not fall below 100g with 5 slices. Sliced. In this case, it is easy to fit within the target range if the cross-sectional area in the length direction of the ham log is constant and that the ham quality, for example, the ratio of fat and lean with different specific gravity is not large unevenness is satisfied, It is practically difficult to satisfy these conditions.
そこで、下記の特許文献1に示すように、規定枚数ずつパック詰めされるスライスハムの製造時に、送給機構でハム原木を切断位置へ向かって送給しながら回転刃で層状に切断し、切断されたスライスハムの枚数が計量枚数に達した時点で、合計重量を計量機で計測し、計量機の計測結果から規定枚数のスライスハムの合計重量を制御装置で予測し、規定枚数のスライスハムの標準重量と、前記予測値との差重量に基づいて、計量枚数以後の送給機構の送給量を制御装置で増減制御して切断を行うようにしている装置が知られており、合計重量のばらつきを抑止して原料ハムの歩留りを向上し、スライスハム製品の製造コストを減少させるようにしている。この装置はいずれも、1パック中に数枚のハムスライスを収容したものに適用されている。
Therefore, as shown in
他方で、厚さ10〜40mm程度に分厚くスライスされたハムブロックを1パックに収めたものが高級品として出回っている。このようなハムブロックを製造する場合、スライスした直後のハムブロックの重量を計量し、この計量値を次のスライスに反映させないと、重量精度の高いスライスは不可能である。実際に、スライス直後に自動計量機に乗せ重量を測定して重量補正値を算出するためには、1秒間位は必要とするので、1分間当たりのスライス枚数は極端に低下する。因みに、通常のハムスライスのパックであれば1パックを0.6秒間でスライスできるのであるが、ハムブロックの場合は1ブロック当りで2秒間位かかるので生産性が悪い。例えば2秒間で公転1回転をさせるとすると、その2秒間のうちの1/6〜1/5はスライス時間に取られる。そして、コンベア上に落下して計量機に搬入され、計量機が重量を検出して次回のスライス時点までにかかる時間は2秒間のうちの4/5程度になる。 On the other hand, ham blocks sliced thickly to a thickness of about 10 to 40 mm are stored in one pack as high-grade products. When manufacturing such a ham block, it is impossible to slice with high weight accuracy unless the weight of the ham block immediately after slicing is measured and this measured value is reflected in the next slice. Actually, in order to calculate the weight correction value by placing the weight on the automatic weighing machine immediately after slicing, it takes about 1 second, so the number of slices per minute is extremely reduced. Incidentally, a normal ham slice pack can slice one pack in 0.6 seconds, but a ham block takes about 2 seconds per block, so the productivity is poor. For example, if one revolution is made in 2 seconds, 1/6 to 1/5 of the 2 seconds is taken as the slice time. Then, it falls on the conveyor and is carried into the weighing machine, and the time taken for the weighing machine to detect the weight and the next slice time is about 4/5 of 2 seconds.
ところで、分厚いハムブロックを得る場合には、公転盤の公転速度を30〜40rpm程度まで落とさなければならない。しかしながら、そこまで落とすと原木送給速度との関係から、回転刃の切れ味が落ちることや、送給方向に対し斜め切りのハムブロックを生じるという不具合がある。
そこで、食品原木を切るときの公転速度を速くするとともに、回転刃が非切断位置にあるときに食品原木の送給を一時止める方法や、回転刃が非切断位置にあるときに食品原木を送給方向と反対側に少し戻す方法が考えられる。しかしながら、前者の方法では、食品原木を送給する送給機が停止しているが、回転刃は公転しているため、原木切断面から削られたスライス屑が発生して製品歩留りが悪くなるという問題が生じる。後者の方法では、食品原木の一定量を送給とは逆の方向に戻すので、次回の切断時には、その分多めに送給しなければならない。その際に、食品原木の温度、肉質などのバラツキ、または機械剛性のガタツキなどによって、一定の戻し量と送給量とにバラツキが生じるため、目標とする送給量ぶんを送れず、得られた個々の食品片の重量に誤差を生じやすくなるという問題が生じる。
By the way, when obtaining a thick ham block, the revolution speed of the revolution board must be reduced to about 30 to 40 rpm. However, if it is dropped to that point, there is a problem that the sharpness of the rotary blade is lowered or a ham block that is obliquely cut with respect to the feeding direction is generated due to the relationship with the log feed speed.
Therefore, in addition to increasing the revolution speed when cutting the food logs, the method also temporarily stops the feeding of the food logs when the rotary blade is in the non-cutting position, and the food logs are sent when the rotary blade is in the non-cutting position. A method of slightly returning to the opposite side to the feeding direction can be considered. However, in the former method, the feeding machine for feeding the raw food logs is stopped, but the rotating blades are revolving, so that sliced scrapes generated from the cut surfaces of the raw wood are generated, resulting in poor product yield. The problem arises. In the latter method, a certain amount of raw food wood is returned in the direction opposite to the feeding direction, so that it is necessary to feed more in the next cutting. At that time, because there is a variation in the fixed return amount and the feed amount due to variations in the temperature, meat quality, etc. of the raw food wood, or fluctuations in the mechanical rigidity, the target feed amount cannot be sent and obtained. In addition, there is a problem that an error tends to occur in the weight of each food piece.
本発明は、上記した従来の問題点に鑑みてなされたものであって、食品原木から送給方向に分厚い食品片を得るうえで、簡素な構成により、重量精度の高い食品片を得ることのできる食品原木切断装置の提供を目的とする。 The present invention has been made in view of the above-described conventional problems, and in obtaining a thick food piece in the feeding direction from a raw food, a simple piece of food piece with high weight accuracy can be obtained. An object of the present invention is to provide a food log cutting device that can be used.
上記目的を達成するために、本発明の請求項1に係る食品原木切断装置は、食品原木を傾斜状に載せるための載せ台と、載せ台上の食品原木を送給する送給機と、送給機により送給された食品原木を当該送給方向と交差する方向に切るために回転する回転刃と、回転刃が配備されていて回転刃の回転軸心と平行で当該回転軸心から偏心した軸心回りに回転する公転盤と、回転刃により食品原木から切り離された食品片の重量を検出する計量機と、を有して成り、前記公転盤が、食品原木を切断する切断位置と食品原木を切断できない非切断位置とに回転刃の位置を変えるために回転駆動されるようになっている食品原木切断装置において、回転刃を常時回転させるとともに、前記回転刃とは別個独立に回転駆動される公転盤の回転を、回転刃が非切断位置にあるときに一時停止させる構成にされていることを特徴とするものである。
In order to achieve the above object, a food log cutting device according to
また、請求項2に係る発明は、前記構成において、送給機による食品原木の送給量を検出する送給量検出手段と、回転刃が非切断位置にあるときに公転盤の回転を一時停止させる公転停止手段と、送給量検出手段により検出された送給量検出値が目標送給量に達したときに公転盤の起動により回転刃を切断位置に移動させて食品原木を切断する公転盤制御手段と、を備えていることを特徴とするものである。
Further, the invention according to
そして、請求項3に係る発明は、前記した各構成において、公転盤の一時停止中に食品原木を目標送給量だけ送給させるように送給機を制御する送給機制御手段を備えていることを特徴とするものである。
And the invention which concerns on
更に、請求項4に係る発明は、前記した各構成において、予め設定されている食品片の重量目標値、計量機により検出された食品片の重量検出値、および、送給量検出手段により検出された送給量検出値に基づいて、次回の目標送給量を算出する目標送給量算出手段を有して成り、公転盤制御手段は、送給量検出手段により検出された送給量検出値が目標送給量算出手段により算出された次回の目標送給量に達したときに公転盤の起動により回転刃を切断位置に移動させて食品原木を切断する機能を備えていることを特徴とするものである。
Further, in the invention according to
本発明の請求項1に係る食品原木切断装置によれば、回転刃を常時回転させるとともに、前記回転刃とは別個独立に回転駆動される公転盤の回転を、回転刃が非切断位置にあるときに一時停止させる構成にされているので、簡単な構成によって、原木切断面からのスライス屑の発生を防止できる。一方、公転停止状態の回転刃を起動して切断位置に移動させるまでの時間は極めて短いが、常時回転している回転刃により好ましい切れ味で食品原木Hを切断することができる。従って、ハム原木などのように原木長手方向に外径や肉質分布が異なるという特有の事情を有する食品であっても、製品歩留りを下げることがない。
具体的には、請求項2のように、食品原木の1回の切断ごとに回転刃の公転を非切断位置で一時停止させ、食品原木の送給量検出値が目標送給量に達したときに、公転盤の起動により回転刃を切断位置に移動させて食品原木を切断するので、ほぼ一定の重量の定貫食品を提供できる。そして、次回の切断時における食品原木の送給については、前回と同様、必要量のみの送給量となるため、食品片の厚みに関するバラツキの発生を防ぐことができる。
According to the food log cutting device according to
Specifically, as described in
そして、請求項3に係る食品原木切断装置によれば、公転盤の一時停止中に食品原木を目標送給量だけ送給させるように送給機を制御する手段を備えているので、公転盤を停止させた後に食品原木を送給できるから、例えばシーケンス制御などのような簡便で安価な制御構成を用いることができ、公転盤の停止時間も有効に活用できて全体の所要制御時間の短縮化を図ることができる。
According to the food log cutting device according to
更に、請求項4に係る食品原木切断装置によれば、食品片の重量目標値、食品片の重量検出値、および、食品原木の送給量検出値に基づいて次回の目標送給量を算出し、次回の送給量検出値が次回の目標送給量に達したときに、公転盤の起動により回転刃を切断位置に移動させて食品原木を切断するので、各々の切断ごとに、食品片の重量検出値および食品原木の送給量検出値を顧みて、次回の目標送給量を順次調整することができ、これにより、重量目標値に近い食品片をいっそう精度よく得ることができる。
Furthermore, according to the food log cutting device according to
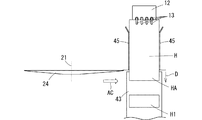
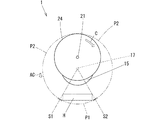
本発明の実施形態を図面に基づいて説明する。尚、以下に述べる実施形態は本発明を具体化した一例に過ぎず、本発明の技術的範囲を限定するものでない。図1は本発明の実施形態1に係る食品原木切断装置の側面構成図、図2は前記食品原木切断装置を示す部分正面図、図3は前記食品原木切断装置の載せ台に載せた食品原木の前部を回転刃で切断する状態を示す部分平面図、図4は前記食品原木切断装置における回転刃の切断位置と非切断位置を示す正面説明図である。
各図において、この実施形態1に係る食品原木切断装置1は、本体基台2の前部に装置フレーム3が立設され、装置フレーム3の後部に受けフレーム6が接続されている。受けフレーム6は前下りの傾斜姿勢に配置され、本体基台2の後部上面に立設された支柱4に支持されている。受けフレーム6は上面が開口した箱状に形成され、受けフレーム6内には、食品原木Hを傾斜状に載せるための載せ台5が設置されている。受けフレーム6内で載せ台5の上方位置には、載せ台5上の食品原木Hを送給する送給機8が配備されている。また、載せ台5の前方位置で装置フレーム3下部中央の開口部内には、前側載せ台5Aが配備されている。
Embodiments of the present invention will be described with reference to the drawings. The embodiment described below is merely an example embodying the present invention, and does not limit the technical scope of the present invention. 1 is a side configuration diagram of a food log cutting device according to
In each figure, in the food
送給機8は、載せ台5の上方位置で載せ台長手方向に沿って配備されていてモータ35の駆動により回転する雄ネジ軸9と、この雄ネジ軸9と螺合する送り体(雌ネジ体)11を有して載せ台長手方向に沿って往復移動する送給駆動部10と、送給駆動部10の前部に配備されたグリッパ12と、から構成されている。この送給機8は、載せ台5側のモータ(例えば直流サーボモータ)35を駆動させて雄ネジ軸9を正転または逆転させることで、グリッパ12を載せ台5に沿って前進(下降)または後退(上昇)させるようになっている。送給機8の前進方向の移動量(食品原木Hの送給量)は、雄ネジ軸9と載せ台5に設けられた光学式のロータリーエンコーダ(送給量検出手段の例)50により検出されるようになっている。グリッパ12は、その前部12Aに爪状の掴み部13を複数備え、これらの掴み部13,13,13,・・・を閉じることで食品原木Hの末端部に食い込んで掴み、掴み部13,13,13,・・・が開くことで食品原木Hの保持を解除するようにしている。
The
装置フレーム3の前面に配置された公転盤15は、モータ18の駆動軸である回転軸17(回転軸心)に連結されており、この回転軸17と、回転軸17に連結されたモータ18とから成る公転駆動機19により例えば矢印AC方向(図2)に回転駆動される。公転盤15には、送給機8により送給された食品原木Hをその送給方向(矢印D方向)と直交方向に切断する円盤状の回転刃24が設けられている。回転刃24は、回転軸21と、回転軸21に連結されたモータ22とから成る自転駆動機23により、例えば矢印C方向(図2)に回転駆動される。すなわち、回転軸17(回転軸心)は、回転刃24と連結された回転軸21(回転軸心)と平行で回転軸21から偏心した位置に配置されている。これにより、回転刃24は回転軸21回りに自転し回転軸17回りに公転するようになっている。尚、図2中の1点鎖線Uは回転軸21の公転軌跡を示している。また、図2中の2点鎖線Vは、回転刃24において回転軸17から最も遠い位置にある刃先の回転軌跡を示している。公転盤15の公転は、図4に示すように、食品原木Hを切断する切断位置(反時計回りに1点鎖線S1から1点鎖線S2の間)P1と、食品原木Hを切断できない非切断位置(反時計回りに1点鎖線S2から1点鎖線S1の間)P2との間で、回転刃24の位置を変えるために行なわれる。すなわち、公転盤15は、回転刃24とは別個独立に回転駆動される構成にされている。
The
載せ台5および前側載せ台5Aと、回転刃24との間は、食品原木Hを送給するための食品原木送給経路44となっている。前側載せ台5Aにおける回転刃24直前の左右端部には、食品原木Hを左右位置決めして回転刃24に導く側面ガイド板45,45が設置されている。そして、回転刃24の送給方向直前位置には、食品原木Hの浮き上がりを防止する原木押え14が配備されている。更に、回転刃24の送給方向直後位置には、回転刃24により食品原木Hから切り離されたハムブロック(食品片の例)を受けて搬送するコンベア43が配備されている。コンベア43の下流側位置には、コンベア46,47,48が当該順に列設されている。コンベア47の下方位置には、コンベア47で搬送されているハムブロックH1の重量Wtを検出する計量機32が配備されている。
Between the
そして、この食品原木切断装置1は、演算器31を有する制御装置30を備えている。演算器31は、図5に示すように、中央演算ユニットCPUを中心として構成され、メモリMおよびデータバスDBを有している。データバスDBのデータ入力側は、人手などにより外部からデータ入力するための入力器33、食品原木Hから切り離されて搬送されるハムブロックH1の重量を検出する計量機32、および、ロータリーエンコーダ50と配線接続されている。データバスDBのデータ出力側は、公転盤15用のモータ18、回転刃24用のモータ22、コンベア43,46,47,48の各モータ、雄ネジ軸9用のモータ35、および表示器34と配線接続されている。中央演算ユニットCPUは、それぞれ後で詳述する、目標送給量算出手段37の機能、公転盤制御手段38の機能、公転停止手段51の機能、および、送給機制御手段52の機能を実現するシーケンサプログラムを備えている。メモリMには、入力器33から操作者により予め設定入力されたハムブロック1個当りの重量目標値W0に関する数値データが記憶されている。また、食品原木Hの目標送給量データが毎回の原木切断ごとにメモリMに書換え更新されるようになっている。
The food
上記のように構成された食品原木切断装置1により角棒状ハムの食品原木Hを厚く切断してハムブロックを得る態様を説明する。一般に、ハムの食品原木Hにおいて、脂肪と赤身の占める割合や胴径は、原木ロット毎あるいは原木長手方向の位置によって異なる。そのために、食品原木Hの送給方向の長さを一定に正確に切断できたとしても、同じ重量のハムブロックは得られないという特有の事情がある。この例では、個々のハムブロックの重量目標値W0を70gに設定して切断処理を行なう。
まず、食品原木Hが載せ台5の上面に載置される。続いて、送給機8が前進し、グリッパ12の掴み部13が下向きに揺動駆動して食品原木Hの後端部を掴持する。その後、送給機8が更に前進し、食品原木Hが左右の側面ガイド板45,45に案内されて前側載せ台5Aの前端に到達する。
A mode of obtaining a ham block by thickly cutting a square raw ham food log H with the food
First, the food log H is placed on the upper surface of the
そして、食品原木Hは送給機8の駆動により送給されて前進し、食品原木Hの前部HAが、図3に示すように側面ガイド板45,45の前端から前方にはみ出る。このとき、ロータリーエンコーダ50により検出された送給量検出値FtがメモリMに記憶される。そして、はみ出た食品原木Hの前部HAは、回転軸17回りに公転(矢印AC方向)し回転軸21回りに常時自転する回転刃24により送給方向と直角の方向に切断される。そうして、食品原木Hの前部HAが回転刃24により切り離されて、例えば厚みのあるハムブロックH1が得られる。
Then, the food log H is fed by the driving of the
このように切り離されたハムブロックH1は、図6のタイムチャートに示すように、コンベア43で搬送される際にその重量検出値Wtが計量機32で検出され演算器31に出力される。そこで、中央演算ユニットCPUにおける目標送給量算出手段37の機能は、メモリMに記憶されているハムブロックの1個当りの重量目標値W0と、計量機32によるハムブロックH1の重量検出値Wtとの重量値比dwに、今回の送給量検出値Ftを乗じて、次回の目標送給量Fnを算出し、算出した次回の目標送給量Fnを、今回の目標送給量Fn(=今回のFt)に換えてメモリMに書換え更新する。
例えば、今回の目標送給量Fn(スライス厚み)が9.5mm、重量目標値W0が70g、重量検出値Wtが65gであった場合、これらを式で表すと下式(1)の通りになる。
Fn[次回]=Ft[今回]×(W0/Wt) ・・・ (1)
=9.5mm×(70g/65g)
=10.23mm
このようにして算出された次回の目標送給量Fn(=10.23mm)のデータメモリMにいったん記憶されて次回の切断に使用される。すなわち、目標送給量算出手段37の機能は、予め設定されているハムブロックの重量目標値W0、計量機32により検出されたハムブロックH1の重量検出値Wt、および、ロータリーエンコーダ50により検出された送給量検出値Ftに基づいて、次回の目標送給量Fnを算出するのである。
As shown in the time chart of FIG. 6, the ham block H <b> 1 separated in this way is detected by the weighing
For example, when the current target feed amount Fn (slice thickness) is 9.5 mm, the weight target value W0 is 70 g, and the weight detection value Wt is 65 g, these are expressed by the following formula (1). Become.
Fn [next time] = Ft [current time] × (W0 / Wt) (1)
= 9.5 mm x (70 g / 65 g)
= 10.23 mm
The next target feed amount Fn (= 10.23 mm) calculated in this way is once stored in the data memory M and used for the next cutting. That is, the function of the target feed amount calculation means 37 is detected by the ham block weight target value W0 set in advance, the ham block H1 weight detection value Wt detected by the weighing
その後、中央演算ユニットCPUにおける公転盤制御手段38の機能は、回転刃24が非切断位置P2にくるようにモータ18にフィードバックして公転盤15を回転させる。そして、中央演算ユニットCPUの公転盤制御手段38の機能は、モータ18を制御して公転盤15の回転を停止させることにより回転刃24の公転を非切断位置P2の何処かで一時停止させておく。図4に示した例では、回転刃24を刃先軌跡(2点鎖線V)上の最上位置で公転停止させている。すなわち、公転停止手段51の機能は、回転刃24が非切断位置P2にあるときに公転盤15の回転を一時停止させる。そこで、送給機制御手段52の機能は、公転盤15の一時停止中に食品原木Hを目標送給量Fnだけ送給させるように送給機8を駆動制御する。そして、ロータリーエンコーダ50により検出された送給量検出値Ftが今回の目標送給量Fnに達したとき、中央演算ユニットCPUが送給機8を停止させるとともに、公転盤制御手段38の機能が公転盤15の回転を再開させ、運転中は常に連続回転している回転刃24を切断位置P1に公転移動させて次回の切断動作を開始する。すなわち、公転盤制御手段38の機能は、ロータリーエンコーダ50により検出された送給量検出値Ftが、目標送給量算出手段37により算出された次回の目標送給量Fnに達したときに、公転盤15を起動することにより回転刃24を切断位置P1に移動させて食品原木Hを切断するのである。このようにして得られたハムブロックH1は、御進物などの高級品として市場に提供される。
After that, the function of the revolution board control means 38 in the central processing unit CPU rotates the
以上のように、この食品原木切断装置1によれば、計量機32で検出されたハムブロックH1の重量検出値Wtおよびそのときの送給量Ftを顧みて、食品原木Hの次回の目標送給量Fnを算出し、常時自転している回転刃24が非切断位置P2で公転停止している状態で、次回の目標送給量Fnぶん食品原木Hを送給し、その後、回転刃24を切断位置P1に公転移動させるように公転盤15を駆動制御するので、重量目標値W0に近い重量のハムブロックH1を得ることができる。すなわち、食品原木Hの1回の切断ごとに回転刃24を非切断位置P2で一時公転停止させるので、原木切断面からのスライス屑の発生を防止できる。そして、次回の切断時における食品原木Hの送給については、前回と同様、必要量のみの送給量となるため、ハムブロックH1の厚みに関するバラツキの発生を防ぐことができる。また、回転刃24の公転を一時停止させたことにより、食品原木Hを切断するときの公転盤15による公転速度を60rpm程度に上げることができたのである。従って、ハム原木Hなどのように原木長手方向(矢印D方向)に外径や肉質分布が異なるという特殊事情を有する食品であっても、製品歩留りを下げることなく、個々の重量がほぼ一定のハムブロックH1を得ることができる。その結果、簡単な構成によって、ハムブロックH1の重量を一定にするという製品管理を厳密に行なうことができる。
As described above, according to the food
また、公転盤15の一時停止中に、食品原木Hを目標送給量Fnだけ送給させるように送給機8を制御する機能を備えているので、公転盤15を回転停止させた後に食品原木Hを送給できる。従って、シーケンサ用の中央演算ユニットCPUによるシーケンス制御などのように、簡便で安価な制御構成を用いることができる。また、公転盤15の停止時間も有効に活用できるため、所要制御時間全体の短縮化を図れる。
Further, since the
ところで、次回の公転盤15の起動により回転刃24を切断位置P1に移動させるまでにかかる時間は極めて短かい。そこで、仮に公転盤15の公転一時停止と同時に回転刃24の自転を停止させるような構成を採用した場合、回転刃24を再度起動して所定の回転数まで上げることは困難であるため、食品原木Hの切断に支障を生じるおそれがある。しかしながら、この食品原木切断装置1では、公転盤15とは別個独立に回転駆動される回転刃24を常時自転させているとともに、回転刃24が非切断位置P2にあるときに公転盤15の回転を一時停止させる構成にされているので、公転停止状態の回転刃24を起動して切断位置P2に移動させるまでの時間が極めて短くても、回転刃24は常に一定の回転数に保持されているから、毎回好ましい切れ味で食品原木Hを切断できるという効果をもたらす。
By the way, the time required to move the
他方で、食品原木Hの切断面を画像モニタなどで撮像し、得られた撮像データを画像処理し、切断面の断面積や脂肪と赤身の割合を算出し、これらの算出値に基づいて食品原木Hの切断ピッチを制御するというシステムも考えられるが、このような画像処理システムは、カメラや演算処理ユニットなどのハードウェアおよび処理ソフトウェアが非常に複雑かつ高価であるため、切断装置全体の製造コストが高くなりすぎる。 On the other hand, the cut surface of the food log H is imaged with an image monitor or the like, the obtained image data is subjected to image processing, the cross-sectional area of the cut surface and the ratio of fat and lean are calculated, and the food based on these calculated values Although a system for controlling the cutting pitch of the log H is also conceivable, such an image processing system is very complicated and expensive in terms of hardware and processing software such as a camera and an arithmetic processing unit. The cost is too high.
尚、上記した実施形態1の食品原木切断装置1では、送給量検出手段として光学式のロータリーエンコーダ50を使用した例を示したが、それに換えて、例えば磁気式のロータリーエンコーダ、直流タコジェネレータ、レゾルバなどを送給量検出手段として用いることも可能である。
また、上記では、食品原木としてハム原木を例に挙げたが、本発明の食品原木としては、ハム原木以外に、棒状の食材であれば特に限定されるものでない。
In the food
In the above, a ham log is taken as an example of the food log, but the food log of the present invention is not particularly limited as long as it is a rod-like food material in addition to the ham log.
1,1A 食品原木切断装置
5 載せ台
5A 前側載せ台
8 送給機
15 公転盤
17,17A 回転軸
18 モータ(駆動源)
21 回転軸
24 回転刃
31 演算器
32 計量機
36 速度調整機
37 目標送給量算出手段
38 公転盤制御手段
50 ロータリーエンコーダ(送給量検出手段)
51 公転停止手段
52 送給機制御手段
AC,C,D 矢印
CPU 中央演算ユニット
Fn 目標送給量
Ft 送給量検出値
H 食品原木
H1 ハムブロック(食品片)
P1 切断位置
P2 非切断位置
W0 重量目標値
Wt 重量検出値
1,1A Food
51 Revolution stop means 52 Feeder control means AC, C, D Arrow CPU Central processing unit Fn Target feed amount Ft Feed amount detection value H Food log H1 Ham block (food piece)
P1 Cutting position P2 Non-cutting position W0 Weight target value Wt Weight detection value
Claims (4)
回転刃を常時回転させるとともに、前記回転刃とは別個独立に回転駆動される公転盤の回転を、回転刃が非切断位置にあるときに一時停止させる構成にされていることを特徴とする食品原木切断装置。 To place a platform for placing food logs in an inclined shape, a feeder for feeding the food logs on the platform, and cutting the food logs fed by the feeder in a direction crossing the feeding direction. A rotating blade that rotates in parallel, a revolving disk that is provided with the rotating blade and is rotated around an axis that is parallel to the rotation axis of the rotary blade and eccentric from the rotation axis, and food that has been separated from the food log by the rotary blade A measuring machine for detecting the weight of the piece, and the revolving disk is rotationally driven to change the position of the rotary blade into a cutting position for cutting the food log and a non-cutting position for cutting the food log. In the food log cutting device designed to
The food is characterized in that the rotating blade is always rotated and the rotation of the revolving disk that is driven to rotate independently of the rotating blade is temporarily stopped when the rotating blade is in the non-cutting position. Log cutting device.
回転刃が非切断位置にあるときに公転盤の回転を一時停止させる公転停止手段と、
送給量検出手段により検出された送給量検出値が目標送給量に達したときに公転盤の起動により回転刃を切断位置に移動させて食品原木を切断する公転盤制御手段と、を備えていることを特徴とする請求項1に記載の食品原木切断装置。 A feed amount detection means for detecting the feed amount of the food log by the feeder;
Revolving stop means for temporarily stopping the rotation of the revolving board when the rotary blade is in the non-cutting position;
Revolution board control means for cutting the food log by moving the rotary blade to the cutting position by the activation of the revolution board when the feed amount detection value detected by the feed amount detection means reaches the target feed amount. The food log cutting device according to claim 1, further comprising:
公転盤制御手段は、送給量検出手段により検出された送給量検出値が目標送給量算出手段により算出された次回の目標送給量に達したときに公転盤の起動により回転刃を切断位置に移動させて食品原木を切断する機能を備えていることを特徴とする請求項2または請求項3に記載の食品原木切断装置。 Based on the preset food target weight target value, the food piece weight detection value detected by the weighing machine, and the feed amount detection value detected by the feed amount detection means, the next target feed Comprising a target feed amount calculating means for calculating the amount;
The revolution platen control means activates the rotary blade by starting the revolution plate when the feed amount detection value detected by the feed amount detection unit reaches the next target feed amount calculated by the target feed amount calculation unit. The food log cutting device according to claim 2 or 3, further comprising a function of cutting the food log by moving to a cutting position.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011221836A JP2013082016A (en) | 2011-10-06 | 2011-10-06 | Food bar cutting device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011221836A JP2013082016A (en) | 2011-10-06 | 2011-10-06 | Food bar cutting device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013082016A true JP2013082016A (en) | 2013-05-09 |
Family
ID=48527775
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011221836A Pending JP2013082016A (en) | 2011-10-06 | 2011-10-06 | Food bar cutting device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013082016A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7383280B2 (en) | 2019-12-12 | 2023-11-20 | ワタナベフーマック株式会社 | Deterioration state estimation system |
-
2011
- 2011-10-06 JP JP2011221836A patent/JP2013082016A/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7383280B2 (en) | 2019-12-12 | 2023-11-20 | ワタナベフーマック株式会社 | Deterioration state estimation system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DK2508310T3 (en) | Process for cutting food | |
| US20130074667A1 (en) | Device for slicing a food product and device with a robot | |
| EP2494307B1 (en) | Automated product profiling apparatus and product slicing system using the same | |
| US8820202B2 (en) | Apparatus and method for cutting a plurality of food products | |
| US20130068076A1 (en) | Method and device for adjusting the cutting gap of slicing device | |
| JPS59224297A (en) | Slicing machine | |
| EP3405316B1 (en) | A method for calibrating a portioning system | |
| US20150246458A1 (en) | Device and method for continuously producing portions | |
| US20120048078A1 (en) | Adjustable sickle blade head | |
| JPH0373294A (en) | Complex device of jump conveyor and slicing machine | |
| US20080250945A1 (en) | Food processing apparatus and operating thereof | |
| KR101849009B1 (en) | Cutting Device for Tread of Tire | |
| JP4101416B2 (en) | Slicing apparatus and method for raw raw wood | |
| JP2013082016A (en) | Food bar cutting device | |
| JP2008173700A (en) | Slicing device for ham block or the like | |
| JP2008221426A (en) | Cutting method and device for rice cake | |
| US20170050331A1 (en) | Gripper comprising an ultrasonic sensor | |
| JP5313546B2 (en) | Cutting equipment for stick food raw wood | |
| JPH08309694A (en) | Food slicer | |
| JP2005342855A (en) | Chopper slicer | |
| JP5795181B2 (en) | Method for preparing sliced food group | |
| WO2010143460A1 (en) | Dough cutting device | |
| JP4942696B2 (en) | Food slicer | |
| JP2017159412A (en) | Crop shear cutting control method and crop shear cutting control device | |
| JP2021169132A (en) | Sliced food manufacturing method and apparatus |