JP2012168169A - Vehicle navigation device and method - Google Patents
Vehicle navigation device and method Download PDFInfo
- Publication number
- JP2012168169A JP2012168169A JP2012010092A JP2012010092A JP2012168169A JP 2012168169 A JP2012168169 A JP 2012168169A JP 2012010092 A JP2012010092 A JP 2012010092A JP 2012010092 A JP2012010092 A JP 2012010092A JP 2012168169 A JP2012168169 A JP 2012168169A
- Authority
- JP
- Japan
- Prior art keywords
- attribute
- lane
- map database
- data
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/387—Organisation of map data, e.g. version management or database structures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3461—Preferred or disfavoured areas, e.g. dangerous zones, toll or emission zones, intersections, manoeuvre types, segments such as motorways, toll roads, ferries
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/387—Organisation of map data, e.g. version management or database structures
- G01C21/3881—Tile-based structures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/10—Map spot or coordinate position indicators; Map reading aids
- G09B29/106—Map spot or coordinate position indicators; Map reading aids using electronic means
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Databases & Information Systems (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Navigation (AREA)
Abstract
Description
(技術分野)
本発明は、マップデータを格納するマップデータベースを含む乗り物のナビゲーションデバイス、マップデータベースを生成する方法、およびマップデータベースに格納されたデータを処理する方法に関する。本発明は、特に、マップデータベースが属性を含み得るこのようなデバイスおよび方法に関する。
(Technical field)
The present invention relates to a vehicle navigation device including a map database for storing map data, a method for generating a map database, and a method for processing data stored in the map database. The invention particularly relates to such devices and methods in which a map database may include attributes.
(背景)
ナビゲーションデバイスは、マップデータを用いて開始ポイントから目的地までのルートを決定するように既知である。概して、これらのナビゲーションデバイスは、コスト関数を最小化するルートに対するサーチを行い得る。コスト関数は、移動時間、ルートに関連付けられた距離または燃料コスト、または最小化されるべき任意の他の適切な量を表し得る。最適化であるルートは、好みのオプションまたは回避のオプションの起動に依存し得る。高速道路、フェリーまたはトンネルに対する好みのオプションおよび回避のオプションが提供され得る。
(background)
Navigation devices are known to determine a route from a starting point to a destination using map data. In general, these navigation devices may search for routes that minimize the cost function. The cost function may represent travel time, distance or fuel cost associated with the route, or any other suitable amount to be minimized. The route that is the optimization may depend on the activation of the preferred option or the avoidance option. Preferred options and avoidance options for highways, ferries or tunnels may be provided.
ルート決定に加えて、ナビゲーションデバイスはまた、ユーザーインターフェースを介してルートガイダンス機能を提供し得る。ガイダンス情報の提供は、光学またはオーディオ指示と組み合わせ可能である、乗り物の周囲の道路ネットワークの一部分についての情報をドライバーに提供する光学またはオーディオ出力の生成を含み得る。 In addition to route determination, the navigation device may also provide route guidance functionality via the user interface. Providing guidance information may include generating optical or audio output that provides the driver with information about a portion of the road network surrounding the vehicle that can be combined with optical or audio instructions.
データがルートサーチおよびルートガイダンスに対して有効に使用されることを可能にするマップデータベースの提供および使用は、相当な挑戦を表し得る。例示として、ルートサーチのために、道路ネットワークの微細構造に関する情報は、通常、開始ポイントと目的地との両方から離れた場所に対して要求されない。しかし、開始ポイントと目的地との両方から離れた場所における少なくともあるタイプの道路(例えば、高速道路)に関する情報は、ルートサーチのために要求される。対照的に、ガイダンス機能は、乗り物の周囲の範囲のみにおける情報を要求し得、より大きなレベルの詳細では要求しない。 Providing and using a map database that allows data to be used effectively for route search and route guidance can represent a significant challenge. Illustratively, for route search, information regarding the fine structure of the road network is usually not required for locations away from both the starting point and the destination. However, information regarding at least some types of roads (eg, highways) at locations away from both the starting point and the destination is required for route search. In contrast, the guidance function may require information only in the area surrounding the vehicle, not at a greater level of detail.
多くの道路ネットワークは、いわゆる追い越し車線を含む。そのような追い越し車線は、しばしば都市部とその近郊において見られ得る。一般的に、追い越し車線は、本明細書において、設備への入口および出口ポイントの数を限定することによって管理されている車線へのアクセスを有する車線として理解される。つまり、通常の車線の全てのアクセスまたは出口ポイントが追い越し車線のアクセスまたは出口ポイントになるわけではない。追い越し車線は、主要な車道通路内に提供された汎用受け入れ能力から物理的に分離され得るか、または柵で囲まれ得る。もしくは、追い越し車線は、道路マーキングによって汎用受け入れ能力から分離され得る。追い越し車線は、両流設備または双方向設備として動作され得る。 Many road networks include so-called overtaking lanes. Such overtaking lanes can often be found in urban areas and their suburbs. In general, an overtaking lane is understood herein as a lane having access to a lane that is managed by limiting the number of entry and exit points to the facility. That is, not all access or exit points in a normal lane become overtake lane access or exit points. The overtaking lane can be physically separated from the universal acceptance capability provided in the main roadway or can be fenced. Alternatively, the overtaking lane can be separated from general acceptance capacity by road marking. The overtaking lane can be operated as a two-way facility or a two-way facility.
そのため、ルートサーチおよびルートガイダンスにおいて、追い越し車線を考慮に入れ得る乗り物のナビゲーションデバイスおよび方法を提供する必要性がある。 Therefore, there is a need to provide a vehicle navigation device and method that can take overtaking lanes into account in route search and route guidance.
(概要)
この必要性は、独立請求項に記述されるデバイスおよび方法によって対処される。従属請求項は、実施形態を規定する。
(Overview)
This need is addressed by the devices and methods described in the independent claims. The dependent claims define embodiments.
局面に従って、マップデータベースおよび処理ユニットを含む乗り物のナビゲーションデバイスが提供される。マップデータベースは、リンクおよび属性を含むマップデータを格納する。リンクは、道路セグメントを表す。第一の属性は、それぞれリンクのサブセットに割り当てられ、サブセットに含まれるリンクが少なくなくとも1つの追い越し車線を有することを示す。第二の属性は、それぞれサブセットに含まれるリンクの少なくとも一部の車線に割り当てられ、それぞれの道路セグメントのどの車線が追い越し車線かを示す。処理ユニットは、マップデータベースに結合され、ルートサーチを少なくとも第一の属性に基づいて行うことと、ルートガイダンス情報の出力をユーザーインターフェースを介して少なくとも第二の属性に基づいて制御することとを行うように構成されている。 In accordance with an aspect, a vehicle navigation device is provided that includes a map database and a processing unit. The map database stores map data including links and attributes. A link represents a road segment. The first attribute is assigned to each subset of links and indicates that the links included in the subset have at least one overtaking lane. The second attribute is assigned to at least some lanes of links included in each subset, and indicates which lane of each road segment is an overtaking lane. The processing unit is coupled to the map database and performs route search based on at least a first attribute and controls output of route guidance information based on at least a second attribute via a user interface. It is configured as follows.
ナビゲーションデバイスにおいて、追い越し車線を示す第一および第二の属性が用いられる。このことは、追い越し車線がルートサーチとルートガイダンスとの両方において考慮に入れられることを可能にする。第一および第二の属性は、マップデータベースの別個の部分に格納され得る。これは、処理ユニットが第一の属性が格納されている部分にアクセスすることによって、追い越し車線を考慮に入れたルートサーチを行い、第二の属性が格納されている部分にアクセスすることによって、追い越し車線を考慮に入れたルートガイダンスを行うことを可能にする。 In the navigation device, first and second attributes indicating an overtaking lane are used. This allows the overtaking lane to be taken into account in both route search and route guidance. The first and second attributes may be stored in separate parts of the map database. This is because the processing unit performs a route search taking into account the overtaking lane by accessing the part where the first attribute is stored, and by accessing the part where the second attribute is stored, Enables route guidance taking into account overtaking lanes.
マップデータベースは、各リンクに対するデータ構造を含み得る。データ構造は、固定された数のデータフィールドを有する。値は、それぞれ、各データフィールドに対して設定される。第一の属性および第二の属性は、リンクに対するデータ構造から分離して格納され得る。次いで、マップデータベースは、少なくとも1つの追い越し車線を含むリンクのみに対して、第一および第二の属性を含むことを要求される。それによって、格納スペース要件が減少され得る。 The map database may include a data structure for each link. The data structure has a fixed number of data fields. A value is set for each data field. The first attribute and the second attribute may be stored separately from the data structure for the link. The map database is then required to include first and second attributes only for links that include at least one overtaking lane. Thereby, storage space requirements may be reduced.
第一の属性は、ブーリアンパラメータを有し得る。処理ユニットは、ルートサーチをリンクに対して第一の属性とブーリアンパラメータとの両方に基づいて行うように構成され得る。ブーリアンパラメータは、回避および好みのオプションが追い越し車線に対して実装されることを可能にする。 The first attribute may have a Boolean parameter. The processing unit may be configured to perform a route search based on both the first attribute and the Boolean parameter for the link. Boolean parameters allow avoidance and preference options to be implemented for overtaking lanes.
マップデータベースにおいて、ブーリアンパラメータが第一の値に設定された第一の属性は、それぞれ、追い越し車線から全体が構成されるリンクに割り当てられ得る。ブーリアンパラメータが第一の値とは異なる第二の値に設定された第一の属性は、それぞれ、少なくとも1つの非追い越し車線を含むリンクに割り当てられ得る。これは、回避および好みのオプションが追い越し車線に対して実装されることを可能にする。 In the map database, each first attribute with a Boolean parameter set to a first value can be assigned to a link that is entirely composed of an overtaking lane. Each first attribute having a Boolean parameter set to a second value different from the first value may each be assigned to a link that includes at least one non-overtaking lane. This allows avoidance and preference options to be implemented for the overtaking lane.
第一の属性は、パラメータを有し得、特に、整数パラメータタイプのパラメータを有し得る。パラメータは、車線の数を示し得る。処理ユニットは、ルートサーチをリンクに対して第一の属性とパラメータとの両方に基づいて行うように構成され得る。 The first attribute may have a parameter, in particular an integer parameter type parameter. The parameter may indicate the number of lanes. The processing unit may be configured to perform a route search based on both the first attribute and the parameter for the link.
マップデータベースは、第一の部分および第二の部分を含み得る。第一の属性は、第一の部分に格納され、第二の属性は、第二の部分に格納される。処理ユニットは、ルートガイダンス情報の出力を第二の部分から検索されたデータに基づき、第一の部分に格納されたデータから独立して制御するように構成され得る。あるいは、またはさらに、処理ユニットは、ルートサーチを第一の部分から検索されたデータに基づき、第二の部分に格納されたデータから独立して行うように構成され得る。そのようなマップデータベースによって、情報は、マップデータベースからルートサーチまたはルートガイダンスのために効率的に検索され得る。ルートサーチを行うとき、回避または好みのオプションが追い越し車線に対して選択された場合、処理ユニットは、コストモデルにおけるリンクのコストを第一の属性に基づいて調節するように構成され得る。 The map database can include a first portion and a second portion. The first attribute is stored in the first part, and the second attribute is stored in the second part. The processing unit may be configured to control the output of the route guidance information based on the data retrieved from the second part and independent of the data stored in the first part. Alternatively or additionally, the processing unit may be configured to perform a route search based on data retrieved from the first part and independent of the data stored in the second part. With such a map database, information can be efficiently retrieved from the map database for route search or route guidance. When performing a route search, if an avoidance or preference option is selected for the overtaking lane, the processing unit may be configured to adjust the cost of the link in the cost model based on the first attribute.
第一の部分および第二の部分は、別個のテーブルであり得る。第一の部分は、マップデータベースのルート層を表し得る。第二の部分は、マップデータベースのガイダンス層を表し得る。第一の部分および第二の部分は、別個のテーブルに格納される必要はないが、論理的に異なるファイルの部分に格納され得る。 The first part and the second part can be separate tables. The first part may represent the root layer of the map database. The second part may represent the guidance layer of the map database. The first part and the second part need not be stored in separate tables, but can be stored in parts of a logically different file.
乗り物のナビゲーションデバイスは、マップデータベースにおけるデータを組織化または処理するためにタイリングを用い得る。そのようなタイリングおよびマップデータベースにおけるデータの対応する組織化の規定は、局所更新を容易にする。道路ネットワークにおける局所変更の結果から生じるマップデータにおける変更は、全部のマップデータベースの交換を要求せずに収容され得る。マップデータベースは、リンクのうちの少なくとも1つが少なくとも1つの追い越し車線を有する場合のみ、タイリングのタイルに配置されたリンクに対して第一の属性を含み得る。少なくとも1つの追い越し車線を有するリンクがないタイルに対する第一の属性を省略することによって、格納スペース要件が減少され得る。 A vehicle navigation device may use tiling to organize or process data in a map database. Such tiling and corresponding organization rules for data in the map database facilitate local updates. Changes in map data resulting from local changes in the road network can be accommodated without requiring the exchange of the entire map database. The map database may include a first attribute for links placed on tiling tiles only if at least one of the links has at least one overtaking lane. By omitting the first attribute for tiles that have no links with at least one overtaking lane, storage space requirements may be reduced.
乗り物のナビゲーションデバイスは、さらなるタイリングをガイダンス機能に対して用い得る。さらなるタイリングは、ルート機能に対して用いられるタイリングと同一であり得るか、または異なり得る。マップデータベースは、タイルに配置された道路セグメントのうちの少なくとも1つが少なくとも1つの追い越し車線を有する場合のみ、さらなるタイリングのタイルに配置された道路セグメントの車線に対して第二の属性を含み得る。少なくとも1つの追い越し車線を有するリンクがないタイルに対する第二の属性を省略することによって、格納スペース要件が減少され得る。 The vehicle navigation device may use additional tiling for the guidance function. The further tiling can be the same as or different from the tiling used for the root function. The map database may include a second attribute for a road segment lane that is placed in a further tiling tile only if at least one of the road segments placed in the tile has at least one overtaking lane. . By omitting the second attribute for tiles that have no links with at least one overtaking lane, storage space requirements can be reduced.
マップデータベースは、ナビゲーションデータ規格(NDS)に従うマップデータベースであり得る。 The map database can be a map database according to the Navigation Data Standard (NDS).
別の局面に従って、マップデータベースを生成する方法が提供される。道路セグメントに関する情報および各道路セグメントの車線に関する情報を含むデータが検索される。複数の道路セグメントに対して、道路セグメントが少なくとも1つの追い越し車線を有するか否かが決定される。第一の属性は、道路セグメントの少なくとも1つの車線が追い越し車線である場合、道路セグメントを表すリンクに選択的に割り当てられる。第二の属性は、道路セグメントを表すリンクの車線に選択的に割り当てられる。第二の属性は、道路セグメントのどの車線が追い越し車線かに基づいて選択的に割り当てられる。第一の属性および第二の属性は、マップデータベースに格納される。 According to another aspect, a method for generating a map database is provided. Data including information about road segments and information about lanes of each road segment is retrieved. For a plurality of road segments, it is determined whether the road segment has at least one overtaking lane. The first attribute is selectively assigned to a link representing a road segment when at least one lane of the road segment is an overtaking lane. The second attribute is selectively assigned to the lane of the link representing the road segment. The second attribute is selectively assigned based on which lane of the road segment is the overtaking lane. The first attribute and the second attribute are stored in the map database.
そのような方法は、マップデータベースが乗り物のナビゲーションデバイスにおける利用のために生成されることを可能にする。マップデータベースは、それぞれ追い越し車線を示す第一および第二の属性を含む。第一および第二の属性は、マップデータベースが乗り物のナビゲーションデバイスに配備された場合、それぞれ、ルートサーチおよびルートガイダンスのために用いられ得る。 Such a method allows a map database to be generated for use in a vehicle navigation device. The map database includes first and second attributes each indicating an overtaking lane. The first and second attributes may be used for route search and route guidance, respectively, when the map database is deployed in a vehicle navigation device.
第一の属性を選択的に割り当てることは、第一の属性のパラメータを道路セグメントの全ての車線が追い越し車線か否かに基づいて設定することを含み得る。パラメータは、マップデータベースに格納され得る。パラメータは、回避および好みのプションが追い越し車線に対して実装されることを可能にする。 Assigning the first attribute selectively may include setting a parameter of the first attribute based on whether all lanes of the road segment are overtaking lanes. The parameters can be stored in a map database. The parameters allow avoidance and preference options to be implemented for the overtaking lane.
第一の属性は、マップデータベースの第一の部分に格納され得、第二の属性は、マップデータベースの第二の部分に格納され得る。第一の部分は、ルートサーチのためのデータを表し得、第二の部分は、ルートガイダンス情報を出力するためのデータを表し得る。そのようなマップデータベースによって、情報は、ルートサーチまたはルートガイダンスのためにマップデータベースから効率的に検索され得る。 The first attribute may be stored in a first part of the map database and the second attribute may be stored in a second part of the map database. The first part may represent data for route search, and the second part may represent data for outputting route guidance information. With such a map database, information can be efficiently retrieved from the map database for route search or route guidance.
第一の部分は、第一のテーブルであり得、第二の部分は、第一のテーブルから分離した第二のテーブルとして形成され得る。第一および第二のテーブルは、例えば、SQLデータベースのテーブルであり得る。 The first part can be a first table and the second part can be formed as a second table separate from the first table. The first and second tables may be SQL database tables, for example.
複数のタイルを含み、道路セグメントを含むタイリングが規定され得る。マップデータベースは、タイリングのいずれか所与のタイルに配置された道路セグメントに関連付けられたデータがマップデータベースにおいて識別され得るように、データをマップデータベースに格納することによって生成され得る。 A tiling that includes a plurality of tiles and that includes a road segment may be defined. The map database may be generated by storing data in the map database so that data associated with road segments located on any given tile of tiling can be identified in the map database.
タイリングの各タイルに対して、第一の属性は、タイリングのそれぞれのタイルに含まれる少なくとも1つの道路セグメントが少なくとも1つの追い越し車線を含む場合のみ、マップデータベースに格納され得る。少なくとも1つの追い越し車線を有するリンクがないタイルに対して第一の属性を省略することによって、格納スペース要件が減少され得る。 For each tile in the tiling, the first attribute may be stored in the map database only if at least one road segment included in each tile in the tiling includes at least one overtaking lane. By omitting the first attribute for tiles that have no links with at least one overtaking lane, storage space requirements can be reduced.
同様に、さらなるタイリングは、ルートガイダンスに関連付けられたデータを組織化するために規定され得る。さらなるタイリングは、タイリングと同一であり得る。さらなるタイリングの各タイルに対して、第二の属性は、さらなるタイリングのそれぞれのタイルに含まれる少なくとも1つの道路セグメントが少なくとも1つの追い越し車線を含む場合のみ、マップデータベースに格納され得る。少なくとも1つの追い越し車線を有するリンクがないタイルに対して第二の属性を省略することによって、格納スペース要件が減少され得る。 Similarly, further tiling can be defined to organize data associated with route guidance. The further tiling can be the same as the tiling. For each tile of further tiling, the second attribute can be stored in the map database only if at least one road segment included in each tile of further tiling includes at least one overtaking lane. By omitting the second attribute for tiles that have no links with at least one overtaking lane, storage space requirements can be reduced.
別の局面に従って、マップデータベースに格納されたデータを処理する方法が提供される。マップデータベースは、道路セグメントを表すリンクと、第一および第二の属性とを含む。第一の属性は、リンクのサブセットに割り当てられ、第二の属性は、リンクのサブセットの少なくとも一部の車線に割り当てられる。方法において、ルートサーチが行われる。追い越し車線に対する好みまたは回避のオプションの起動が監視される。ルートのコストは、好みまたは回避のオプションが起動された場合、リンクに割り当てられた第一の属性に基づいて、選択的に調節される。方法において、ルートガイダンス情報が出力される。ルートガイダンス情報は、第二の属性に基づいて、出力される。 In accordance with another aspect, a method for processing data stored in a map database is provided. The map database includes a link representing a road segment and first and second attributes. The first attribute is assigned to a subset of links and the second attribute is assigned to at least some lanes of the link subset. In the method, a route search is performed. Activation of preference or avoidance options for overtaking lanes is monitored. The cost of the route is selectively adjusted based on the first attribute assigned to the link when a preference or avoidance option is activated. In the method, route guidance information is output. The route guidance information is output based on the second attribute.
ルートサーチを行うことは、好みまたは回避のオプションが起動された場合、第一の属性が割り当てられるリンクを識別することと、リンクに対するコストモデルにおけるコストを選択的に増やす、または減らすこととを含み得る。 Performing a route search includes identifying a link to which the first attribute is assigned and selectively increasing or decreasing the cost in the cost model for the link when a preference or avoidance option is invoked. obtain.
ルートガイダンス情報を出力することは、追い越し車線である乗り物の周囲状況における車線を第二の属性に基づいて、識別することと、オーディオまたは光学出力を識別された車線に基づいて改変することと含み得る。 Outputting route guidance information includes identifying a lane in the surrounding environment of a vehicle that is an overtaking lane based on the second attribute and modifying audio or optical output based on the identified lane. obtain.
ルートサーチは、第二の属性から独立して行われ得る。あるいは、またはさらに、ルートガイダンス情報を出力することが、第一の属性から独立して行われ得る。 The route search can be performed independently of the second attribute. Alternatively or additionally, outputting the route guidance information can be performed independently of the first attribute.
マップデータベースは、いずれか一局面または実施形態に従うマップデータを生成する方法によって生成されたマップデータベースであり得る。 The map database may be a map database generated by a method for generating map data according to any one aspect or embodiment.
別の局面に従って、リンクおよび属性を含むマップデータベースを格納するデータキャリアーが提供される。リンクは、道路セグメントを表し、第一の属性は、それぞれ、リンクのサブセットに割り当てられ、サブセットに含まれるリンクが少なくとも1つの追い越し車線を有することを示す。第二の属性は、それぞれ、サブセットに含まれるリンクの少なくとも一部の車線に割り当てられ、それぞれの道路セグメントのどの車線が追い越し車線かを示す。第二の属性は、第一の属性とは異なる。 In accordance with another aspect, a data carrier is provided that stores a map database that includes links and attributes. The links represent road segments, and the first attributes are each assigned to a subset of links, indicating that the links included in the subset have at least one overtaking lane. Each second attribute is assigned to at least some lanes of the links included in the subset and indicates which lane of each road segment is an overtaking lane. The second attribute is different from the first attribute.
さらに別の局面に従って、ナビゲーションデータ規格(NDS)に従って構成されているマップデータベースを格納し、追い越し車線を示す少なくとも1つの属性を含むデータキャリアーが提供される。 According to yet another aspect, a data carrier is provided that stores a map database configured in accordance with a navigation data standard (NDS) and includes at least one attribute indicative of an overtaking lane.
上で言及し、下で説明する特徴は、それぞれの示された組み合わせだけで用いられ得るだけでなく、他の組み合わせまたは単独で用いられ得ることが理解されるべきである。 It is to be understood that the features mentioned above and described below can be used not only in the respective combinations shown, but also in other combinations or alone.
例えば、本発明は、以下の項目を提供する。
(項目1)
乗り物のナビゲーションデバイスであって、
該乗り物のナビゲーションデバイスは、
マップデータベース(10)であって、該マップデータベース(10)は、マップデータを格納し、該マップデータは、リンクおよび属性(63、64、83、86、93、98)を含み、該リンクは、道路セグメント(51〜59)を表し、第一の属性(63、64、83、86)は、それぞれ該リンクのサブセットに割り当てられることによって、該サブセットに含まれる該リンクが少なくとも1つの追い越し車線を有することを示し、第二の属性(93、98)は、それぞれ該サブセットに含まれる該リンクの少なくとも一部の車線に割り当てられることによって、該それぞれの道路セグメント(51〜53)のどの車線が追い越し車線かを示し、該第二の属性(93、98)は、該第一の属性(63、64、83、86)とは異なる、マップデータベース(10)と、
処理ユニット(2)であって、該処理ユニット(2)は、該マップデータベース(10)に結合され、該第一の属性(63、64、83、86)に少なくとも基づいてルートサーチを行うことと、ルートガイダンス情報の出力を、ユーザーインターフェース(4)を介して少なくとも該第二の属性(93、98)に基づいて制御することとを行うように構成されている、処理ユニット(2)と
を含む、乗り物のナビゲーションデバイス。
(項目2)
上記マップデータベース(10)は、各リンクに対してデータ構造(62、82、85、88、90、92、97、101、103)を含み、該データ構造(62、82、85、88、90、92、97、101、103)は、リンクに対して固定された数のデータフィールドを有し、値は、それぞれ各データフィールドに対して設定されており、
上記第一の属性(63、64、83、86)および上記第二の属性(93、98)は、該データ構造(62、82、85、88、90、92、97、101、103)から分離して格納される、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目3)
上記第一の属性(63、64、83、86)は、ブーリアンパラメータを有し、
上記処理ユニット(2)は、リンクに対するルートサーチを、該第一の属性(63、64、83、86)と該ブーリアンパラメータとの両方に基づいて行うように構成されている、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目4)
上記マップデータベース(10)において、上記ブーリアンパラメータが第一の値に設定された上記第一の属性(63、83)は、それぞれ、リンク(51、52)へ割り当てられ、該リンク(51、52)は、追い越し車線で全体が構成され、該ブーリアンパラメータが該第一の値とは異なる第二の値に設定された該第一の属性(64、86)は、それぞれ、リンク(53)へ割り当てられ、該リンク(53)は、少なくとも1つの追い越し車線と少なくとも1つの非追い越し車線とを含む、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目5)
上記マップデータベース(10)は、第一の部分(11)および第二の部分(14)を含み、上記第一の属性(63、64、83、86)は、該第一の部分(11)に格納され、上記第二の属性(93、98)は、該第二の部分(14)に格納され、
上記処理ユニット(2)は、該第二の部分(14)から検索され、該第一の部分(11)に格納されたデータから独立しているデータに基づいて、上記ルートガイダンス情報の出力を制御するように構成されている、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目6)
上記第一の部分(11)は、第一のテーブルであり、上記第二の部分(14)は、該第一のテーブル(11)とは異なる第二のテーブルである、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目7)
各道路セグメント(51〜59)は、タイリングの少なくとも1つのタイル(50、71〜74)に配置され、
上記マップデータベース(10)は、リンクによって表された該道路セグメント(51〜53)の少なくとも1つが少なくとも1つの追い越し車線を有する場合ののみ、該タイリングのタイル(50、71〜74)に配置された該リンク(51〜53)に対する上記第一の属性(63、64、83、86)を含む、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目8)
各リンクは、さらなるタイリングの少なくとも1つのタイル(71〜74)に配置され、
上記マップデータベース(10)は、該さらなるタイリングのタイル(71〜74)に配置された道路セグメント(51〜59)の少なくとも1つが少なくとも1つの追い越し車線を有する場合にのみ、該さらなるタイリングの該タイル(71〜74)に配置された該道路セグメント(51〜59)の車線に対する上記第二の属性(93、98)を含む、上記項目のいずれかに記載の乗り物のナビゲーションデバイス。
(項目9)
マップデータベース(10)を生成する方法であって、
該方法は、
道路セグメント(51〜59)に関する情報と各道路セグメントの車線に関する情報とを含むデータを検索することと、
複数の道路セグメント(51〜59)に対して、
該道路セグメント(51〜59)が少なくとも1つの追い越し車線を有するか否かを決定することと、
該道路セグメント(51〜59)の少なくとも1つの車線が追い越し車線である場合、第一の属性(63、64、83、86)を該道路セグメント(51〜59)を表すリンクに選択的に割り当てることと、
第二の属性(93、98)を該道路セグメント(51〜59)の車線に選択的に割り当てることであって、該第二の属性は(93、98)は、該道路セグメント(51〜59)のどの車線が追い越し車線かに基づいて選択的に割り当てられる、ことと
を行うことと、
該第一の属性(63、64、83、86)および第二の属性(93、98)を該マップデータベース(10)に格納することと
を含む、方法。
(項目10)
上記第一の属性(63、64、83、86)を選択的に割り当てることは、該第一の属性(63、64、83、86)のパラメータを上記道路セグメント(51〜59)の全ての車線が追い越し車線であるか否かに基づいて設定することを含み、該パラメータは、上記マップデータベース(10)に格納される、上記項目のいずれかに記載の方法。
(項目11)
上記第一の属性(63、64、83、86)は、上記マップデータベース(10)の第一の部分(11)に格納され、上記第二の属性(93、98)は、該マップデータベース(10)の第二の部分(14)に格納され、該第一の部分(11)は、ルートサーチのためのデータを表し、該第二の部分(14)は、ルートガイダンス情報を出力するためのデータを表す、上記項目のいずれかに記載の方法。
(項目12)
複数のタイル(50、71〜74)を含み、上記道路セグメント(51〜59)をカバーするタイリングが規定され、
該タイリングの各タイル(50、71〜74)に対して、第一の属性(63、64、83、86)は、該タイリングの上記それぞれのタイル(50、71〜74)に含まれる少なくとも1つの道路セグメント(51〜59)が少なくとも1つの追い越し車線を含む場合にのみ、上記マップデータベース(10)に格納される、上記項目のいずれかに記載の方法。
(項目13)
複数のタイル(71〜74)を含み、上記道路セグメント(51〜59)をカバーするさらなるタイリングが規定され、
該さらなるタイリングの各タイル(71〜74)に対して、第二の属性(93、98)は、該さらなるタイリング(71〜74)の上記それぞれのタイルに含まれる少なくとも1つの道路セグメント(51〜59)が少なくとも1つの追い越し車線を含む場合にのみ、上記マップデータベース(10)に格納される、上記項目のいずれかに記載の方法。
(項目14)
マップデータベース(10)に格納されたデータを処理する方法であって、該マップデータベース(10)は、道路セグメント(51〜59)を表すリンクと、第一の属性(63、64、83、86)と、第二の属性(93、98)とを格納し、該第一の属性(63、64、83、86)は、リンク(51〜53)のサブセットに割り当てられ、該第二の属性(93、98)は、該リンク(51〜53)のサブセットの少なくとも一部の車線に割り当てられ、該方法は、
ルートサーチを行うことであって、該ルートサーチを行うことは、
追い越し車線に対する好みまたは回避のオプションの起動を監視することと、該好みまたは回避のオプションが起動された場合、リンクに割り当てられた該第一の属性(63、64、83、86)に基づいて、ルートのコストを選択的に調節することと
を含む、ことと、
ルートガイダンス情報を該第二の属性(93、98)に基づいて出力することと
を含む、方法。
(項目15)
上記ルートサーチは、上記第二の属性(93、98)から独立して行われ、該ルートガイダンス情報の出力は、上記第一の属性(63、64、83、86)から独立して行われる、上記項目のいずれかに記載の方法。
For example, the present invention provides the following items.
(Item 1)
A vehicle navigation device,
The vehicle navigation device is
A map database (10), wherein the map database (10) stores map data, the map data including links and attributes (63, 64, 83, 86, 93, 98), , Representing road segments (51-59), and the first attributes (63, 64, 83, 86) are each assigned to a subset of the links so that the links included in the subset have at least one overtaking lane And the second attribute (93, 98) is assigned to at least a part of the lanes of the links included in the subset, so that which lane of the respective road segment (51-53) Indicates the overtaking lane and the second attribute (93, 98) is different from the first attribute (63, 64, 83, 86) A map database (10),
A processing unit (2) that is coupled to the map database (10) and performs a route search based at least on the first attribute (63, 64, 83, 86) And a processing unit (2) configured to control the output of route guidance information based on at least the second attribute (93, 98) via the user interface (4); Including vehicle navigation devices.
(Item 2)
The map database (10) includes a data structure (62, 82, 85, 88, 90, 92, 97, 101, 103) for each link, and the data structure (62, 82, 85, 88, 90). , 92, 97, 101, 103) have a fixed number of data fields for the link, and a value is set for each data field,
The first attribute (63, 64, 83, 86) and the second attribute (93, 98) are obtained from the data structure (62, 82, 85, 88, 90, 92, 97, 101, 103). A vehicle navigation device according to any of the preceding items, stored separately.
(Item 3)
The first attribute (63, 64, 83, 86) has a Boolean parameter,
The processing unit (2) is configured to perform a route search for a link based on both the first attribute (63, 64, 83, 86) and the Boolean parameter. Vehicle navigation device as described in Crab.
(Item 4)
In the map database (10), the first attribute (63, 83) in which the Boolean parameter is set to a first value is assigned to the link (51, 52), respectively, and the link (51, 52). ) Is composed entirely of overtaking lanes, and the first attribute (64, 86) in which the Boolean parameter is set to a second value different from the first value is to the link (53), respectively. The vehicle navigation device according to any of the preceding items, wherein the allocated link (53) includes at least one overtaking lane and at least one non-overtaking lane.
(Item 5)
The map database (10) includes a first part (11) and a second part (14), and the first attribute (63, 64, 83, 86) includes the first part (11). And the second attribute (93, 98) is stored in the second part (14),
The processing unit (2) outputs the route guidance information based on data retrieved from the second part (14) and independent of the data stored in the first part (11). A vehicle navigation device according to any of the preceding items configured to control.
(Item 6)
Any of the above items, wherein the first part (11) is a first table and the second part (14) is a second table different from the first table (11). Vehicle navigation device as described in.
(Item 7)
Each road segment (51-59) is located on at least one tile (50, 71-74) of tiling,
The map database (10) is placed on the tile (50, 71-74) of the tiling only if at least one of the road segments (51-53) represented by links has at least one overtaking lane The vehicle navigation device according to any of the preceding items, comprising the first attribute (63, 64, 83, 86) for the generated link (51-53).
(Item 8)
Each link is located on at least one tile (71-74) of further tiling,
The map database (10) can be used for the further tiling only if at least one of the road segments (51-59) located on the further tiling tiles (71-74) has at least one overtaking lane. 79. A vehicle navigation device according to any of the preceding items, comprising the second attribute (93, 98) for the lane of the road segment (51-59) located on the tile (71-74).
(Item 9)
A method for generating a map database (10) comprising:
The method
Searching for data including information on road segments (51-59) and information on lanes of each road segment;
For multiple road segments (51-59)
Determining whether the road segment (51-59) has at least one overtaking lane;
If at least one lane of the road segment (51-59) is an overtaking lane, the first attribute (63, 64, 83, 86) is selectively assigned to the link representing the road segment (51-59). And
Selectively assigning a second attribute (93, 98) to the lane of the road segment (51-59), wherein the second attribute (93, 98) is the road segment (51-59). ) To be selectively assigned based on which lane is the overtaking lane,
Storing the first attribute (63, 64, 83, 86) and the second attribute (93, 98) in the map database (10).
(Item 10)
Selectively assigning the first attribute (63, 64, 83, 86) assigns the parameter of the first attribute (63, 64, 83, 86) to all of the road segments (51-59). A method according to any of the preceding items, comprising setting based on whether the lane is an overtaking lane, wherein the parameters are stored in the map database (10).
(Item 11)
The first attribute (63, 64, 83, 86) is stored in the first part (11) of the map database (10), and the second attribute (93, 98) is stored in the map database (10). 10) is stored in the second part (14), the first part (11) represents data for route search, and the second part (14) is for outputting route guidance information The method according to any of the preceding items, wherein the data is represented.
(Item 12)
A tiling is defined that includes a plurality of tiles (50, 71-74) and covers the road segments (51-59),
For each tile (50, 71-74) of the tiling, a first attribute (63, 64, 83, 86) is included in the respective tile (50, 71-74) of the tiling. Method according to any of the preceding items, wherein the method is stored in the map database (10) only if at least one road segment (51-59) contains at least one overtaking lane.
(Item 13)
A further tiling is defined that includes a plurality of tiles (71-74) and covers the road segments (51-59);
For each tile (71-74) of the further tiling (93, 98), a second attribute (93, 98) includes at least one road segment included in the respective tile of the further tiling (71-74) ( A method according to any of the preceding items, wherein 51-59) is stored in the map database (10) only if it contains at least one overtaking lane.
(Item 14)
A method of processing data stored in a map database (10), wherein the map database (10) includes links representing road segments (51 to 59) and first attributes (63, 64, 83, 86). ) And a second attribute (93, 98), the first attribute (63, 64, 83, 86) is assigned to a subset of links (51-53), the second attribute (93, 98) are assigned to at least some lanes of the subset of the links (51-53), the method comprising:
Performing a route search, and performing the route search,
Monitoring activation of a preference or avoidance option for an overtaking lane and, if the preference or avoidance option is activated, based on the first attribute (63, 64, 83, 86) assigned to the link Selectively adjusting the cost of the route, and
Outputting route guidance information based on the second attribute (93, 98).
(Item 15)
The route search is performed independently from the second attribute (93, 98), and the output of the route guidance information is performed independently from the first attribute (63, 64, 83, 86). The method according to any of the above items.
(摘要)
乗り物のナビゲーションデバイス(1)は、マップデータを格納するマップデータベース(3)と処理ユニット(2)とを含む。マップデータベース(3)は、追い越し車線の存在を示す第一の属性と、車線に割り当てられることによって道路セグメントのどの車線が追い越し車線かを示す第二の属性とを含む。処理ユニット(2)は、マップデータベース(3)に結合され、ルートサーチを少なくとくとも第一の属性に基づいて行うことと、ルートガイダンス情報の出力をユーザーインターフェース(4)を介して少なくとも第二の属性に基づいて制御することとを行うように構成されている。
(Summary)
The vehicle navigation device (1) includes a map database (3) for storing map data and a processing unit (2). The map database (3) includes a first attribute indicating the presence of an overtaking lane and a second attribute indicating which lane of the road segment is an overtaking lane by being assigned to the lane. The processing unit (2) is coupled to the map database (3) and performs route search based on at least the first attribute and outputs route guidance information via at least a second interface via the user interface (4). And controlling based on the attributes of the.
添付の図面に関連して読んだ場合、実施形態の先述および他の特徴が以下の実施形態の詳細な説明からより明らかになる。図面において、類似の参照数字は、類似の要素を指す。 The foregoing and other features of the embodiments will become more apparent from the following detailed description of the embodiments when read in conjunction with the accompanying drawings. In the drawings, like reference numerals refer to like elements.
(詳細な説明)
図1は、実施形態に従う乗り物のナビゲーションデバイス1を概略的に例示する。ナビゲーションデバイス1は、(例えば、メモリに格納された制御指令に従う)ナビゲーションデバイス1の動作を制御する処理ユニット2を含む。処理ユニット2は、例えば、1つ以上のマイクロプロセッサ、デジタルシグナルプロセッサまたは特定用途向け集積回路の形態である中央処理装置を含み得る。ナビゲーションデバイス1は、メモリ3に格納されたマップデータベースをさらに含む。メモリ3は、ランダムアクセスメモリ、フラッシュメモリまたはハードドライブのようなさまざまなタイプのメモリのうちのいずれか1つ、またはいずれかの組み合わせを含み得るが、コンパクトディスク(CD)、DVD、メモリカードなどのようなリムーバブルメモリも含み得る。ナビゲーションデバイス1は、また、ガイダンス情報をユーザーへ出力する出力インターフェース4を含む。出力インターフェース4は、光学出力デバイス、オーディオ出力デバイスまたはそれらの組み合わせを含み得る。ナビゲーションデバイス1は、また、ユーザーがオプションを設定することを可能にする入力インターフェース5を含む。特に、入力インターフェース5は、ユーザーがルートサーチに対する好みのオプションまたは回避のオプションを設定することを可能にし得る。
(Detailed explanation)
FIG. 1 schematically illustrates a
ナビゲーションデバイスは、位置センサーおよび/またはワイヤレス受信器および/または乗り物インターフェースのようなさらなる構成要素を含み得る。位置センサーは、ナビゲーションデバイス1がインストールされた乗り物の現在の位置を決定するように適合され得る。位置センサーは、GPS(全地球測位システム)センサー、ガリレオセンサー、モバイル通信網に基づいた位置センサーなどを含み得る。ワイヤレス受信器は、メモリ3に格納されたマップデータベースを更新する情報を受信するように構成され得る。車インターフェースは、処理ユニット2が他の乗り物システムからの情報または乗り物状態情報を乗り物インターフェースを介して得ることを可能にし得る。乗り物インターフェースは、例えば、CAN(コントローラーエリアネットワーク)またはMOST(メディアオリエンテッドデバイストランスポート)インターフェースを含み得る。
The navigation device may include additional components such as position sensors and / or wireless receivers and / or vehicle interfaces. The position sensor can be adapted to determine the current position of the vehicle on which the
メモリ3は、マップデータを含むマップデータベースを格納する。マップデータベースは、道路セグメントを表すリンクおよび属性に関する情報を含む。マップデータベースは、特に、リンクによって表された道路セグメントが追い越し車線を含むか否かを示す属性を含む。異なる第一の属性および第二の属性は、プロセッサにリンクが少なくとも1つの追い越し車線を含むことを通知するか、および/または道路セグメントのどの車線が追い越し車線かに関する情報を提供するために提供され得る。
The
プロセッサ2は、ユーザーが追い越し車線に対して好みのオプションまたは回避のオプションを入力インターフェース5を介して設定した場合、ルートサーチを行うために第一の属性を用い得る。プロセッサ2は、車線に割り当てられた第二の属性から独立してルートサーチを行い得る。プロセッサ2は、出力インターフェース5を介したルートガイダンス情報の出力の制御のために第二の属性を用い得る。プロセッサ2は、ルートガイダンス情報の出力を第一の属性から独立して制御し得る。マップデータベースは、そのため、それぞれ追い越し車線に関連付けられた異なる第一の属性および第二の属性を含み得る。第一の属性は、ルートサーチのために用いられ、第二の属性は、ルートガイダンスのために用いられる。
The
一般的に、さまざまな属性がリンクに割り当てられ得、マップデータベースに格納され得る。属性は、リンクの開始および終了ポイントに関する情報またはマップトポロジーに関する他の情報を含み得る。そのような属性は、予め規定された数のデータフィールドを有するデータ構造に格納され得る。予め規定された数のデータフィールドは、マップデータベースに格納された各リンクまたは他のマップ特徴のために、それぞれ提供される。さらに、属性は、それぞれのリンク上に存在する場合のみ、リンクまたは他の特徴に選択的に割り当てられ得る。メモリ3に格納されたマップデータベースは、追い越し車線を示す属性を柔軟な属性として含む。柔軟な属性は、少なくとも1つの追い越し車線を含むリンクのみに対して選択的に格納される。追い越し車線を示す属性は、各リンクに対してマップデータベースに格納された固定フォーマットデータ構造から分離して格納され得る。
In general, various attributes can be assigned to links and stored in a map database. Attributes may include information about link start and end points or other information about map topology. Such attributes can be stored in a data structure having a predefined number of data fields. A predefined number of data fields are provided for each link or other map feature stored in the map database, respectively. Furthermore, attributes can be selectively assigned to links or other features only if present on each link. The map database stored in the
メモリ3に格納されたマップデータベースは、異なる論理層を含み得る。さらに、マップデータベースは、タイリングの異なる更新領域またはタイルに関連付けられた異なるブロックに分割され得る。そのような構造は、更新の実行を容易にする。これは、マップデータベースを道路ネットワークの局所変更に調節するマップデータベースの更新を行うために特に望ましい。次いで、そのような更新は、道路ネットワークにおける変更によって影響された更新領域またはタイルのみを更新することによって行われ得る。これは、更新がより時間効率な態様または無線更新としてより容易に行われることを可能にする。
The map database stored in the
図2は、マップデータベース10の概略表示である。以下で説明する構造を有するマップデータベース10は、乗り物のナビゲーションデバイス1のメモリ3に格納され得る。
FIG. 2 is a schematic display of the map database 10. A map database 10 having the structure described below can be stored in the
マップデータベース10は、複数の層11および14を含む。複数の層11および14は、ルート層11およびガイダンス層14を含む。ルート層11は、ルートサーチを行うために要求される情報を含む。この情報は、リンクの開始ポイントおよび終了ポイントのような道路ネットワークのトポロジーに関する情報を含み得る。ルート層11における情報は、さまざまなコストモデルに対するリンクに関連付けられたコストをさらに含み得る。ルート層11における情報は、リンクのコストがルートサーチにおいて好みのオプションまたは回避のオプションに基づいて調節されることを可能にする属性をさらに含み得る。
The map database 10 includes a plurality of
ルート層11において、異なるレベル12、13があり得る。異なるレベル12、13は、異なるレベルの詳細で道路ネットワークを表すデータを含む。例示として、道路ネットワークの全ての道路セグメントがレベル13において存在し得るが、道路セグメントの一部は、より高いレベル12において省略され得る。
There can be
ガイダンス層14は、ルートガイダンスのために要求されるデータを含む。ガイダンス層14は、ガイダンス情報の光学および/またはオーディオ出力のために要求されるデータを特に含み得る。ガイダンス層は、また、レベル構造を含み得る。異なるレベルにおけるデータは、異なるレベルの詳細で道路ネットワークを表す。
The
ルート層11およびガイダンス層14は、メモリに格納された別個のテーブルとして構成され得る。限定よりも例示として、ルート層11は、SQLデータベースにおいてテーブルであり得、ガイダンス層14は、SQLデータベースにおいて別のテーブルであり得る。ルート層11およびガイダンス層14は、別個のファイルに格納され得る。ルート層11およびガイダンス層14は、1つのファイルの論理的に異なった部分であり得る。
The
マップデータベース10は、さらなる層15〜17を含み得る。ネーム層15は、道路名、家屋番号などへの参照を含む。トラック層16は、トラックまたはローリーのための特定の属性を含み得る。高度運転者支援システム(ADAS)層17は、高度運転者支援のためのデータを含み得る。さらなるまたは代替の層が提供され得、例えば、興味のポイントのための層、音声表示のための層または基本マップ表示のための層である。
The map database 10 may include additional layers 15-17. The
マップデータベース10は、ナビゲーションデータ規格(NDS)によって規定される構造を有し得る。NDSは、柔軟な属性が用いられることを可能にする。これは、追い越し車線を示す属性が、マップデータベース10がNDSに従って設定された場合に規定され、格納されることを可能にする。 The map database 10 may have a structure defined by the navigation data standard (NDS). NDS allows flexible attributes to be used. This allows the attribute indicating the overtaking lane to be defined and stored when the map database 10 is set according to NDS.
追い越し車線を示す属性は、マップデータベースに格納される。第一の属性は、それぞれ、ルート層11に格納されるデータのために用いられ得る。第一の属性は、各リンクに割り当てられ得、各リンクは、少なくとも1つの追い越し車線を含む。これは、好みのオプションが少なくとも1つの追い越し車線を含む道路セグメントに対して実装されることを可能にする。マップデータベース10は、第一の属性を指向性リンクと非指向性リンクとの両方のために格納し得る。異なるタイプのリンクが区別されるようにマップデータベース10が構造化された場合、マップデータベース10は、第一の属性を全てのタイプのリンクのために格納し得る。例示として、マップデータベース10がタイル境界にわたり延在するタイリングのタイルおよびルートリンク全体に配置されたベースリンクを含む場合、マップデータベース10は、ベースリンクとルートリンクとの両方に振り当てられた第一の属性を格納し得る。
The attribute indicating the overtaking lane is stored in the map database. Each of the first attributes may be used for data stored in the
第一の属性は、ブーリアンパラメータであり得るパラメータを有し得る。いずれかのリンク(このリンクのために、第一の属性は、マップデータベース10に格納される)に対して、道路セグメントの全ての車線が追い越し車線である場合、パラメータは、1つの値(例えば、TRUE)を有し得る。 The first attribute may have a parameter that may be a Boolean parameter. For any link (for this link, the first attribute is stored in the map database 10), if all lanes of the road segment are overtaking lanes, the parameter is a single value (e.g. , TRUE).
追い越し車線でない少なくとも1つの車線がある場合、パラメータは、別の値(例えば、FALSE)を有し得る。第一の属性およびそのパラメータに基づいて、プロセッサ2は、いずれかの道路セグメントが追い越し車線から全体が構成されているか否かを決定し得る。その場合、追い越し車線に対する回避のオプションが選択された場合、コストは、ルートサーチにおいて増える。プロセッサ2は、また、いずれかの道路セグメントが少なくとも1つ(on)の追い越し車線を有するか否かを決定し得、その場合、追い越し車線に対する好みのオプションが選択された場合、コストは、ルートサーチにおいて増える。
If there is at least one lane that is not an overtaking lane, the parameter may have another value (eg, FALSE). Based on the first attribute and its parameters, the
第一の属性は、固定フォーマットデータ構造から分離して格納され得る。固定フォーマットデータ構造は、マップデータベース10に全てのリンクまたは他のマップ特徴のために格納される。そのため、各道路セグメントに対して、道路セグメントが追い越し車線を含むか否かを示すために設定されなければならないフラッグのための格納スペースを保存することは要求されない。各道路セグメントに対して、道路セグメントが追い越し車線から全体が構成されているか否かを示すために設定されなければならないフラッグのための格納スペースを保存することも要求されない。むしろ、そのような情報は、柔軟な属性として含まれる。第一の属性は、少なくとも1つの追い越し車線を含むリンクがない更新領域またはタイルに対して省略され得る。追い越し車線に関する情報を格納する格納スペース要件は、これによって、減少され得る。 The first attribute may be stored separately from the fixed format data structure. A fixed format data structure is stored in the map database 10 for all links or other map features. Thus, it is not required for each road segment to save storage space for a flag that must be set to indicate whether the road segment contains an overtaking lane. For each road segment, it is also not required to save storage space for a flag that must be set to indicate whether the road segment is entirely composed of overtaking lanes. Rather, such information is included as a flexible attribute. The first attribute may be omitted for update areas or tiles that do not have a link that includes at least one overtaking lane. The storage space requirement for storing information about the overtaking lane can thereby be reduced.
ルートサーチを行う場合、プロセッサ2は、追い越し車線に対する回避のオプションまたは好みのオプションをルート層11に格納された第一の属性およびそのパラメータに基づいて考慮に入れ得る。そのような手続きは、下で図3および図4を参照してより詳細に説明される。
When performing a route search, the
追い越し車線を示す第二の属性は、ガイダンス層14に格納され得る。第二の属性は、少なくとも1つの追い越し車線を含むそれらの道路セグメントのみのために選択的に格納され得る。いくつかの実装において、第二の属性は、道路セグメントが、追い越し車線である少なくとも1つの車線と、追い越し車線でない別の車線を有する場合のみ、道路セグメントの車線に選択的に割り当てられ得る。第二の属性は、ガイダンス層14に格納され得ることによってプロセッサ2に各道路セグメントが少なくとも1つの追い越し車線を含むことを示し、道路セグメントのどの車線が追い越し車線かに関する情報をさらに提供し得る。第二の属性を車線に割り当てるために、さらなる情報がマップデータベース10にリンクに対して選択的に格納され得る。リンクは、少なくとも1つの追い越し車線を含み、それぞれの道路セグメントのどの車線が追い越し車線かを示す。このさらなる情報は、車線マスクの形態で格納され得る。車線マスクは、追い越し車線である車線に対して1つの値(例えば、「1」)および追い越し車線でない車線に対して別の値(例えば、「0」)を有する。そのようなさらなる情報は、第二の属性を個々の車線に割り当てるために用いられ得る。
A second attribute indicating an overtaking lane may be stored in the
ナビゲーションデバイス1がルートガイダンスを行う場合、プロセッサ2は、ガイダンス層14にアクセスし、ルートガイダンスのためのデータを検索する。一般的に、乗り物の周囲の範囲に関するデータのみがルートガイダンスのために検索されなければならない。道路セグメントのためのデータをガイダンス層14から検索する場合、プロセッサ2は、第二の属性がそれぞれの道路セグメントの1つの車線または複数の車線に割り当てられているか否かを決定する。プロセッサ2は、第二の属性をどの車線が追い越し車線かを(例えば、車線マスクの形態で)示すさらなる情報にまとめ得、道路セグメントのどの車線が追い越し車線かを決定する。あるいは、第二の属性は、個々の車線に対して別個に格納され得る。
When the
プロセッサ2は、ルートガイダンスを道路セグメントのどの車線が追い越し車線かに基づいて制御し得る。例えば、運転指示を有するオーディオ出力は、道路セグメントのどの車線が追い越し車線かに基づいて制御され得る。さらに、またはあるいは、運転指示を有する光学出力は、道路セグメントのどの車線が追い越し車線かに基づいて制御され得る。
The
第二の属性は、固定フォーマットデータ構造から分離して格納され得る。固定フォーマットデータ構造は、マップデータベース10に全てのリンクまたは他のマップ特徴のために格納される。そのため、道路セグメントのどの車線が追い越し車線かを示す各道路セグメントに対して設定されなければならないフラッグのための格納スペースを保存することは要求されない。第二の属性は、少なくとも1つの追い越し車線を含む道路セグメントがない更新領域またはタイルに対して省略され得る。追い越し車線に関する情報を格納する格納スペース要件は、これによって、減少され得る。 The second attribute may be stored separately from the fixed format data structure. A fixed format data structure is stored in the map database 10 for all links or other map features. Thus, it is not required to save storage space for flags that must be set for each road segment that indicates which lane of the road segment is the overtaking lane. The second attribute may be omitted for update areas or tiles that do not have a road segment that includes at least one overtaking lane. The storage space requirement for storing information about the overtaking lane can thereby be reduced.
ルートガイダンスを行う場合、プロセッサ2は、道路セグメントのどの車線が追い越し車線かをガイダンス層14に格納された第二の属性に基づいて考慮に入れ得る。そのような手続きは、図5を参照して下でより詳細に説明される。
When providing route guidance, the
第一および第二の属性は、マップデータベース10の異なる層に別個に格納されるが、追い越し車線情報に関連付けられたこの情報を格納するために要求されるオーバーヘッド格納スペースは、適度に保たれ得る。マップデータベース10は、第一および第二の属性を少なくとも1つの追い越し車線を含むそれらの道路セグメントのみのために選択的に含む。さらに、異なる層11および14における別個の第一および第二の属性を用いることによって、マップデータベース10へのアクセスがルートサーチとルートガイダンスとの両方において効率的に行われ得る。
The first and second attributes are stored separately in different layers of the map database 10, but the overhead storage space required to store this information associated with the overtaking lane information can be kept reasonably. . The map database 10 selectively includes first and second attributes only for those road segments that include at least one overtaking lane. Furthermore, by using separate first and second attributes in the
図3〜5を参照して、乗り物のナビゲーションデバイス1のプロセッサ2によって行われ得る方法がより詳細に説明される。プロセッサ2は、図3および図4において例示されるルートサーチと、図5において例示されるルートガイダンスとを行い得る。
With reference to FIGS. 3 to 5, the method that can be performed by the
方法は、道路セグメントと、追い越し車線を示す属性とを表すリンクに関する情報を格納するマップデータベースを用いて行われ得る。マップデータベースは、図2または図6〜図10を参照して説明する構成を有し得る。例示として、第一の属性は、図3〜図5において「EXPRESS_ROAD」と呼ばれる。第一の属性のパラメータは、「AllLanes」と呼ばれ、第二の属性は、「EXPRESS_LANE」と呼ばれる。 The method may be performed using a map database that stores information about links representing road segments and attributes indicating passing lanes. The map database may have a configuration described with reference to FIG. 2 or FIGS. By way of example, the first attribute is called “EXPRESS_ROAD” in FIGS. The parameter of the first attribute is called “Alllanes” and the second attribute is called “EXPRESS_LANE”.
図3は、ルートサーチを行う手続き20のフローチャートである。21において、ルートサーチが開始される。ルートサーチは、ユーザー入力に基づいて開始され得る。あるいは、またはさらに、ルートサーチは、また、所定の事象が検知された場合(例えば、ユーザーが以前にルートサーチにおいて見つけたルートを離れた場合)、自動的に開始され得る。
FIG. 3 is a flowchart of the
22において、追い越し車線を有する道路に対する回避のオプションまたは好みのオプションが選択されたか否かが決定される。道路に対するそのような回避のオプションまたは好みのオプションの選択は、入力インターフェースを介してなされ得、乗り物のナビゲーションデバイスに格納され得る。 At 22, it is determined whether an avoidance option or a preference option for a road having an overtaking lane has been selected. Selection of such avoidance or preference options for the road can be made via an input interface and stored in the vehicle navigation device.
追い越し車線を有する道路に対して回避のオプションまたは好みのオプションが選ばれていないことが決定された場合、23において、ルートサーチは、従来の方法でマップデータベースにおけるデータに基づいて行われる。第一の属性EXPRESS_ROADは、このルートサーチにおいて無視される。 If it is determined that no avoidance or preference option has been selected for a road with an overtaking lane, at 23, a route search is performed based on data in the map database in a conventional manner. The first attribute EXPRESS_ROAD is ignored in this route search.
追い越し車線を有する道路に対して回避のオプションまたは好みのオプションが選ばれたことが決定された場合、24において、ルートサーチは、リンクのうちの一部に割り当てられた第一の属性EXPRESS_ROADを考慮に入れて行われる。第一の属性EXPRESS_ROADは、さまざまな方法で考慮に入れられ得る。例示として、追い越し車線を有する道路に対する全回避のオプションが設定された場合、追い越し車線の全てを構成する道路を表す全てのリンクは無視され得る。あるいは、またはさらに、リンクのコストは、第一の属性EXPRESS_ROADが割り当てられたリンクに対して回避または好みのオプションに基づいて調節され得る。コストのそのような調節は、最速ルート(移動時間を最小化させる)、最短ルート(移動距離を最小化させる)または最少燃料消費ルート(燃料消費を最小化する)のようなさまざまなコストモデルのうちのいずれか1つに対してなされ得る。 If it is determined that an avoidance or preference option has been selected for a road with an overtaking lane, at 24, the route search considers the first attribute EXPRESS_ROAD assigned to some of the links. To be done. The first attribute EXPRESS_ROAD may be taken into account in various ways. By way of example, if the all avoidance option is set for a road with an overtaking lane, all links representing roads that make up all of the overtaking lane may be ignored. Alternatively or additionally, the cost of the link may be adjusted based on avoidance or preference options for the link assigned the first attribute EXPRESS_ROAD. Such adjustment of the cost can be achieved for various cost models such as fastest route (minimizing travel time), shortest route (minimizing travel distance) or least fuel consumption route (minimizing fuel consumption). It can be done for any one of them.
図4は、ルートサーチにおけるリンクコストを第一の属性に基づいて調節する手続き30のフローチャートである。手続き30は、図3の手続き20における24において行われるルートサーチにおけるコスト調節を実装するために用いられ得る。
FIG. 4 is a flowchart of a
31において、リンクはルートサーチにおいて識別される。リンクは、例えば、サーチアルゴリズムの拡張工程において識別され得る。リンクは、例えば、ダイクストラのアルゴリズムまたはA*アルゴリズムの拡張工程において識別され得る。あるいは、コストの調節は、例えば、ダイクストラのアルゴリズムまたはA*アルゴリズムを行う前に行われ得る。後者の場合、EXPRESS_ROAD属性を有する全てのリンクは、これらのリンクのコストを調節するために、まず識別され得る。 At 31, the link is identified in the route search. The link may be identified, for example, in the search algorithm extension process. The links may be identified, for example, in the Dijkstra algorithm or the A * algorithm extension process. Alternatively, cost adjustments can be made prior to performing, for example, Dijkstra's algorithm or A * algorithm. In the latter case, all links with the EXPRESS_ROAD attribute can first be identified in order to adjust the cost of these links.
32において、識別されたリンクが識別されたリンクに割り当てられた第一の属性EXPRESS_ROADを有するか否かが決定される。この決定は、マップデータベースから検索されたデータに基づいてなされる。層になった構造を有するマップデータベースに対して、決定はルート層11に格納された第一の属性に基づいてなされ得る。
At 32, it is determined whether the identified link has a first attribute EXPRESS_ROAD assigned to the identified link. This determination is made based on data retrieved from the map database. For a map database having a layered structure, a determination can be made based on the first attribute stored in the
識別されたリンクが識別されたリンクに割り当てられた第一の属性EXPRESS_ROADを有さないことが決定された場合、33において、リンクのコストは、調節されないままになる。ルートサーチは、それぞれのコストモデルのコストを表すコストによって続き得る。 If it is determined that the identified link does not have the first attribute EXPRESS_ROAD assigned to the identified link, at 33 the cost of the link remains unadjusted. The route search may continue with a cost that represents the cost of the respective cost model.
識別されたリンクが識別されたリンクに割り当てられた第一の属性EXPRESS_ROADを有することが決定された場合、34において、追い越し車線に対する回避のオプションが設定されたか否かが決定される。 If it is determined that the identified link has the first attribute EXPRESS_ROAD assigned to the identified link, it is determined at 34 whether an avoidance option for the overtaking lane has been set.
回避のオプションが設定されていないことが決定された場合、35において、リンクのコストが減少される。それによって、追い越し車線を有する道路に対する好みのオプションが、リンクに対するコストを減少させることによって考慮に入れられる。リンクへは、第一の属性EXPRESS_ROADが割り当てられる。リンクのコストを35において減少させることは、さまざまな方法で行われ得る。例示として、それぞれのコストモデルのコストが1より小さい係数によって掛けられ得る。あるいは、値がそれぞれのコストモデルのコストから引かれ得る。リンクのコストを35において減少させることは、数学的操作またはテーブルルックアップを用いて行われ得る。ルートサーチは、リンクに対する減少されたコストによって続き得る。 If it is determined that the avoidance option is not set, at 35, the cost of the link is reduced. Thereby, the preferred option for roads with overtaking lanes is taken into account by reducing the cost for the links. The first attribute EXPRESS_ROAD is assigned to the link. Reducing the cost of the link at 35 can be done in various ways. Illustratively, the cost of each cost model can be multiplied by a factor less than one. Alternatively, the value can be subtracted from the cost of the respective cost model. Decreasing the cost of the link at 35 can be done using a mathematical operation or a table lookup. Route search may continue with reduced cost for the link.
回避のオプションが設定されたことが決定された場合、36において、第一の属性EXPRESS_ROADのパラメータAllLanesがTRUEであるか否かが決定される。 If it is determined that the avoidance option has been set, it is determined at 36 whether the parameter Alllanes of the first attribute EXPRESS_ROAD is TRUE.
第一の属性EXPRESS_ROADのパラメータAllLanesがTRUEでない場合、38において、リンクのコストは調節されないままである。手続きは、それぞれのコストモデルのコストを表すコストによって続き得る。これは、回避のオプションが、追い越し車線でない少なくとも1つの車線を有する道路が避けられることを要求しないことを反映している。 If the parameter Alllanes of the first attribute EXPRESS_ROAD is not TRUE, at 38 the cost of the link remains unadjusted. The procedure may continue with a cost that represents the cost of each cost model. This reflects that the avoidance option does not require that a road with at least one lane that is not an overtaking lane be avoided.
第一の属性EXPRESS_ROADのパラメータAllLanesがTRUEでないことが決定された場合、37において、リンクのコストが増やされる。リンクのコストを37において増やすことは、さまざまな方法で行われ得る。例示として、それぞれのコストモデルのコストは、1より大きい係数によって掛けられ得る。あるいは、値がそれぞれのコストモデルのコストに加えられ得る。リンクのコストを37において増やすことは、数学的操作またはテーブルルックアップを用いて行われ得る。ルートサーチは、リンクに対して増やされたコストによって続き得る。 If it is determined that the parameter Alllanes of the first attribute EXPRESS_ROAD is not TRUE, at 37, the cost of the link is increased. Increasing the cost of the link at 37 can be done in various ways. Illustratively, the cost of each cost model can be multiplied by a factor greater than one. Alternatively, a value can be added to the cost of each cost model. Increasing the cost of the link at 37 can be done using a mathematical operation or a table lookup. Route search can continue with increased cost for the link.
追い越し車線に対する回避および好みのオプションを考慮に入れるルートサーチが図3および図4において例示されるが、ルートサーチは、追い越し車線の利用が完全に禁止されているオプションの変種も含み得る。そのような場合、それぞれのリンクは、ルートサーチにおける考慮から、第一の属性EXPRESS_ROADおよびそのパラメータAllLanesに基づいて離され得る。 Although a route search that takes into account avoidance and preference options for overtaking lanes is illustrated in FIGS. 3 and 4, the route search may also include a variant of options where the use of overtaking lanes is completely prohibited. In such a case, each link may be released from consideration in the route search based on the first attribute EXPRESS_ROAD and its parameter Alllanes.
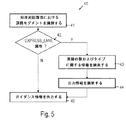
図5は、ルートガイダンス情報の出力を制御する手続き40のフローチャートである。41において、乗り物の現地の周囲環境における道路セグメントが識別される。道路セグメントは、現在の乗り物の位置に基づいて識別され得る。道路セグメントは、ルートサーチの結果に基づいてさらに識別され得る。41において識別された道路セグメントは、全ての道路セグメントを含み得る。全ての道路セグメントに関する情報がガイダンス情報を出力するために要求される。
FIG. 5 is a flowchart of a
42において、識別された道路セグメントのいずれか1つの車線が、その車線に割り当てられた第二の属性EXPRESS_LANEを有するか否かが決定される。この決定は、マップデータベースから検索されたデータに基づいてなされる。層になった構造を有するマップデータベースに対して、決定がガイダンス層14に格納された第二の属性に基づいてなされ得る。
At 42, it is determined whether any one lane of the identified road segment has a second attribute EXPRESS_LANE assigned to that lane. This determination is made based on data retrieved from the map database. For a map database having a layered structure, a determination may be made based on a second attribute stored in the
道路セグメントの車線が、その車線に割り当てられた第二の属性EXPRESS_LANEを有さないことが決定された場合、45において、ガイダンス情報が出力される。この場合、ガイダンス情報は、第二の属性EXPRESS_LANEに基づいて改変されない。 If it is determined that the lane of the road segment does not have the second attribute EXPRESS_LANE assigned to the lane, guidance information is output at 45. In this case, the guidance information is not modified based on the second attribute EXPRESS_LANE.
道路セグメントの車線が、その車線に割り当てられた第二の属性EXPRESS_LANEを有することが決定された場合、43において、それぞれの道路セグメントに対する車線の数およびタイプに関する情報が検索される。情報は、マップデータベースから検索され得る。マップデータベース10のようなマップデータベースが層になった構造を有する場合、情報は、ガイダンス層14から検索され得る。検索された情報は、道路セグメントの車線の数に関する情報を含み得る。検索された情報は、車線のうちのどれが追い越し車線かに関する情報を含み得る。
If it is determined that the lane of the road segment has a second attribute EXPRESS_LANE assigned to that lane, information regarding the number and type of lanes for each road segment is retrieved at 43. Information can be retrieved from a map database. Information can be retrieved from the
44において、出力情報は、43において検索された情報に基づいて調節される。出力情報を調節することは、道路セグメントのどの車線が追い越し車線かに基づいてスピーチ出力を調節することを含み得る。出力情報を調節することは、あるいは、またはさらに、道路セグメントのどの車線が追い越し車線かに基づいて光学出力を調節することを含み得る。光学出力情報は、例えば、追い越し車線を示す色彩マーキングまたは追い越し車線を示すグラフィックアイコンを用いて調節され得る。 At 44, the output information is adjusted based on the information retrieved at 43. Adjusting the output information may include adjusting the speech output based on which lane of the road segment is the overtaking lane. Adjusting the output information may alternatively or additionally include adjusting the optical output based on which lane of the road segment is the overtaking lane. The optical output information may be adjusted using, for example, color markings indicating the overtaking lane or graphic icons indicating the overtaking lane.
次いで、45において、ガイダンス情報が出力される。ガイダンス情報出力に45において影響する道路セグメントが追い越し車線を含む場合、ガイダンス情報は、第二の属性EXPRESS_LANEによって提供される追い越し車線に関する情報に基づいて生成される。 Next, at 45, guidance information is output. If the road segment that affects the guidance information output at 45 includes an overtaking lane, the guidance information is generated based on information about the overtaking lane provided by the second attribute EXPRESS_LANE.
図6〜図10を参照して、追い越し車線を示す第一の属性および第二の属性の定義ならびにマップデータベースの構造がより詳細に説明される。 With reference to FIGS. 6 to 10, the definition of the first attribute and the second attribute indicating the overtaking lane and the structure of the map database will be described in more detail.
図6は、道路セグメント51〜55を含む道路ネットワークの概略図である。道路ネットワークを含むタイリングが規定される。タイリングは、タイル50を含む。
FIG. 6 is a schematic diagram of a road network including road segments 51-55. Tiling including road network is defined. The tiling includes a
複数の道路セグメント51〜55がラベル「RS1」、「RS5」によって、マップデータベースにおいて参照される。道路セグメントの一部は、少なくとも1つの追い越し車線を含み得る。例示として、マップデータベースにおいて、「RS1」および「RS2」とラベル付けされた道路セグメント51および52は、追い越し車線から全体が構成され得る。マップデータベースにおいて「RS3」とラベル付けされた道路セグメント53は、少なくとも1つの追い越し車線と、追い越し車線でない少なくとも1つの車線とを有し得る。道路セグメント54および55は、いずれの追い越し車線も含まなくなり得る。
A plurality of
道路セグメント51〜55は、リンクによってマップデータベースにおいて示される。ルート層におけるデータとガイダンス層におけるデータとの両方は、それぞれタイルに従って組織化され得る。タイルにおいて、それぞれの道路セグメントが配置される。これは、局所更新がより容易に行われることを可能にする。 Road segments 51-55 are indicated in the map database by links. Both the data in the root layer and the data in the guidance layer can each be organized according to tiles. Each road segment is arranged in a tile. This allows local updates to be made easier.
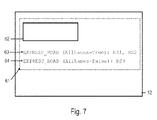
図7は、ルート層のセクション12の概略表示である。セクション12は、重要性がより低い道路セグメントを省略して、粗い解像度を有するレベルを表す。まだ、レベルにおいて存在している道路セグメントのセットは、例えば、機能的道路分類または他の道路セグメント特性に基づいて選択され得る。
FIG. 7 is a schematic representation of
ルート層のセクション12は、タイル50に関連付けられたデータ61を含む。データ61は、道路セグメント51〜55を表す各リンクに対してデータ構造を含む。このデータ構造は、62おいて、道路セグメント51〜55を表すリンクに対して概略的に示される。データ構造は、各リンクに対して固定された数のデータフィールドを含む。データ構造は、予め規定された構造を有し得る。値は、各フィールドにおいて設定されなければならない。
The
マップデータベースは、リンクに割り当てられた第一の属性をさらに含み、それぞれのリンクが少なくとも1つの追い越し車線を含むことを示す。第一の属性は、また、データ61にタイル50のために格納され得る。タイル50において、それぞれの道路セグメント51〜55が配置される。
The map database further includes a first attribute assigned to the links, indicating that each link includes at least one overtaking lane. The first attribute may also be stored for
タイル50に対するデータ61は、第一の属性63を含み、ブーリアンパラメータは、「RS1」および「RS2」とラベル付けされた道路セグメントに対して1つの値に設定される。これは、「RS1」および「RS2」とラベル付けされた道路セグメントが追い越し車線から全体が構成されていることを示す。「RS1」および「RS2」とラベル付けされた道路セグメントには、ブーリアンパラメータが1つの値に設定された第一の属性63が割り当てられる。
タイル50に対するデータ61は、第一の属性64を含み、ブーリアンパラメータは、「RS3」とラベル付けされた道路セグメントに対して別の値に設定される。これは、「RS3」とラベル付けされた道路セグメントが少なくとも1つの追い越し車線を有するが、追い越し車線から全体は構成されていないことを示す。「RS3」とラベル付けされた道路セグメントには、ブーリアンパラメータが別の値に設定された第一の属性64が割り当てられる。
第一の属性63および64は、リンクに対して予め規定されたデータ構造62に含まれない。第一の属性63および64は、柔軟な属性である。第一の属性は、それぞれのタイルにおける少なくとも1つの道路セグメントが少なくとも1つの追い越し車線を有する場合のみ、タイルを表すルート層のデータ61に含まれ得る。
The first attributes 63 and 64 are not included in the
図7において、第一の属性は、属性EXPRESS_ROADとして示され、第一の属性のパラメータは、AllLanesとして示される。 In FIG. 7, the first attribute is indicated as attribute EXPRESS_ROAD, and the parameter of the first attribute is indicated as Alllanes.
図8は、図6の道路ネットワークの概略図である。図8において、道路ネットワークは、より大きなレベルの詳細で例示される。図8および図6は、異なるレベルにおける同じ道路ネットワークを表すが、図8に例示されるレベルにおいて存在する道路ネットワークの道路セグメント56〜59は、図6に例示されるより粗いレベルにおいて省略される。 FIG. 8 is a schematic diagram of the road network of FIG. In FIG. 8, the road network is illustrated with a greater level of detail. 8 and 6 represent the same road network at different levels, but road segments 56-59 of the road network that exist at the level illustrated in FIG. 8 are omitted at the coarser level illustrated in FIG. .
道路ネットワークは、道路セグメント51〜55および道路セグメント56〜59を含む。道路ネットワークを含むタイリング70が規定される。タイリングは、タイル71〜74を含む。図8に例示される解像度のレベルにおいて、タイル71〜74のタイルサイズは、図6に例示されるより粗い解像度のレベルにおけるよりも小さくなるように選択される。
The road network includes
道路ネットワークは、タイルと、タイル境界にわたり延在する道路セグメントとの全体内に配置された道路セグメントを含み得る。道路セグメント59は、タイル73とタイル74との間の境界にわたり延在する。マップデータベースにおけるデータを組織化するために、道路セグメント59は、道路セグメント59のトポロジーを反映する1つのリンクに関連付けられ得る。さらに、道路セグメント59のジオメトリを反映する構造75、76が規定され得、それぞれ1つのタイルにのみ配置される。構造75、76は、ジオメトリラインと呼ばれ得る。
The road network may include road segments disposed within the entire tile and road segments extending across the tile boundaries.
省略される道路セグメントがより少ないか、または全く道路セグメントが省略されない図8に示される解像度のレベルにおいて、ルート層およびガイダンス層におけるデータも、それぞれタイルごとの態様で組織化され得る。 At the level of resolution shown in FIG. 8 where fewer road segments are omitted or no road segments are omitted, data in the route layer and the guidance layer can also be organized in a tile-by-tile manner.
図9は、ルート層のセクション13の概略表示である。セクション13は、道路ネットワークを図7のセクション12より大きなレベルの詳細で表すレベルを表す。例示として、ルート層のセクション13によって表される詳細のレベルは、全ての道路セグメントを含み得る。
FIG. 9 is a schematic representation of the
ルート層のセクション13は、タイル71に関連付けられたデータ81を含む。データ81は、タイル71内に配置された道路セグメント51および52を表す各リンクに対してデータ構造を含む。このデータ構造は、82において、道路セグメント51および52を表すリンクのために概略的に示される。データ構造は、各リンクに対して固定された数のデータフィールドを含み、予め規定された構造を有する。値は、各フィールドにおいて設定されなければならない。
The
マップデータベースは、リンクに割り当てられた第一の属性をさらに含み、それぞれのリンクが少なくとも1つの追い越し車線を含むことを示す。第一の属性も、それぞれの道路セグメント51および52が配置されるタイル71に対するデータ81に格納され得る。
The map database further includes a first attribute assigned to the links, indicating that each link includes at least one overtaking lane. The first attribute may also be stored in the
タイル71に対するデータ81は、第一の属性83を含み、ブーリアンパラメータは、「RS1」および「RS2」とラベル付けされた道路セグメントに対して1つの値(例えば、「TRUE」)に設定される。上で説明したように、これは、「RS1」および「RS2」とラベル付けされた道路セグメントが追い越し車線から全体が構成されることを示す。「RS1」および「RS2」とラベル付けされた道路セグメントには、ブーリアンパラメータが1つの値に設定された第一の属性83が割り当てられる。
The
ルート層のセクション13は、タイル72に関連付けられたデータ84を含む。データ84は、タイル72内に配置された道路セグメント53〜55を表す各リンクに対してデータ構造を含む。このデータ構造は、85において、道路セグメント53〜55を表すリンクのために概略的に示される。データ構造は、各リンクに対して固定された数のデータフィールドを含み、予め規定された構造を有する。値は、各フィールドにおいて設定されなければならない。
マップデータベースは、リンクに割り当てられた第一の属性をさらに含み、それぞれのリンクが少なくとも1つの追い越し車線を含むことを示す。第一の属性も、それぞれの道路セグメント53〜55が配置されるタイル72に対するデータ84に格納され得る。タイル72に対するデータ84は、第一の属性86を含み、ブーリアンパラメータは、「RS3」とラベル付けされた道路セグメントに対して別の値(例えば、「FALSE」)に設定される。これは、「RS3」とラベル付けされた道路セグメントが少なくとも1つの追い越し車線を有するが、追い越し車線から全体は構成されないことを示す。「RS3」とラベル付けされた道路セグメントには、ブーリアンパラメータが別の値に設定された第一の属性86が割り当てられる。
The map database further includes a first attribute assigned to the links, indicating that each link includes at least one overtaking lane. The first attribute may also be stored in the
ルート層のセクション13は、タイル73に関連付けられたデータ87と、タイル74に関連付けられたデータ89とを含む。データ87は、タイル73内に配置される道路セグメント57、58を表す各リンクと、道路セグメント59の一部を表すジオメトリライン76とに対するデータ構造を含む。この88において概略的に示されるデータ構造は、予め規定された数およびタイプのフィールドを有する固定された属性から構成される。データ89は、タイル73内に配置される道路セグメント56を表すリンクと、道路セグメント59の一部を表すジオメトリライン75とに対するデータ構造を含む。この90において概略的に示されるデータ構造は、予め規定されたデータフィールドを有する固定された属性から構成される。
The
タイル73および74における道路セグメントのうち、追い越し車線を有するものがないとすると、第一の属性は、タイル73および74を表すデータ87および89に格納されない。第一の属性を追い越し車線を有する道路セグメントがないタイルに関連付けられたデータに格納することは要求されない。それによって、過剰な車線属性を実装するための格納スペース要件は、適度なままであり得る。
If no road segment in
図9において、第一の属性は、属性EXPRESS_ROADとして示され、第一の属性のパラメータは、AllLanesとして示される。 In FIG. 9, the first attribute is indicated as attribute EXPRESS_ROAD, and the parameter of the first attribute is indicated as Alllanes.
図7および図9から見て取れるように、実施形態に従って、道路セグメント51〜53に対する第一の属性は、より高いレベルの道路セグメントを表すセクション12と、より低いレベルで表し、より多くの道路セグメントを含むセクション13との両方において格納され得る。
As can be seen from FIGS. 7 and 9, according to the embodiment, the first attribute for road segments 51-53 is represented at
図10は、再び図8の道路ネットワークに対するガイダンス層14のセクションの概略表示である。ガイダンス層14は、また、異なる正確度で道路ネットワークを表す複数のレベルを含み得るが、追い越し車線を示すために車線に割り当てられた第二の属性は、各レベルに含まれる必要はない。異なるレベルがある場合、第二の属性は、特に、省略される道路セグメントの数が最も少ないレベル(つまり、道路ネットワークが最も大きな詳細において表される基本レベル)において格納され得る。そのようなレベルのみが図10において概略的に例示される。
FIG. 10 is a schematic representation of a section of the
ルート層における第一の属性は、ルート層の各異なるレベルにおいて存在し得るが、ガイダンス層が複数のレベルを有する場合、ガイダンス層のレベルのうちの1つにおいてのみ、第二の属性が含まれれば十分である。 The first attribute in the root layer may be present at each different level of the root layer, but if the guidance layer has multiple levels, the second attribute is included only in one of the levels of the guidance layer. It is enough.
ガイダンス層14は、タイル71に関連付けられたデータ91を含む。データ91は、タイル71内に配置された道路セグメント51および52を表す各リンクに対してデータ構造を含む。このデータ構造は、92において、道路セグメント51および52を表すリンクのために概略的に示される。データ構造は、各リンクに対して固定された数のデータフィールドを含み、予め規定された構造を有する。値は、各フィールドにおいて設定されなければならい。
マップデータベースは、リンクの車線に割り当てられた第二の属性をさらに含み、それぞれの車線が追い越し車線であることを示す。第二の属性も、それぞれの道路セグメント51および52が配置されるタイル71に対するデータ91に格納され得る。
The map database further includes a second attribute assigned to the lane of the link, indicating that each lane is an overtaking lane. The second attribute may also be stored in the
タイル71に対するデータ91は、「RS1」および「RS2」とラベル付けされた道路セグメントに対して第二の属性93を含む。さらなるデータ構造94および95は、第二の属性93を道路セグメント51および52のうちの個々の車線に割り当てるために提供され得る。データ構造94および95は、道路セグメントのそれぞれの車線が追い越し車線の場合、「1」のような1つの値を有する車線マスクを表し得、道路セグメントのそれぞれの車線が追い越し車線でない場合、「0」のような別の値を表し得る。プロセッサは、第二の属性93を道路セグメント51の車線マスクを表すデータ構造94にまとめ得、追い越し車線である道路セグメント51のうちの車線を識別する。プロセッサは、第二の属性93を道路セグメント52の車線マスクを表すデータ構造95にまとめ得、追い越し車線である道路セグメント52のうちの車線を識別する。
ガイダンス層は、タイル72に関連付けられたデータ96を含む。データ96は、タイル72内に配置された道路セグメント53〜55を表す各リンクに対してデータ構造を含む。このデータ構造は、97において、道路セグメント53〜55を表すリンクのために概略的に示される。データ構造は、各リンクに対して固定された数のデータフィールドを含み、予め規定された構造を有する。値は、各フィールドにおいて設定されなければならない。
The guidance layer includes
タイル98に対するデータ96は、「RS3」とラベル付けされた道路セグメントに対して第二の属性98を含む。さらなるデータ構造99は、第二の属性98を道路セグメント53のうちの個々の車線に割り当てるために提供され得る。データ構造99は、車線マスクを表し得る。プロセッサは、第二の属性98を道路セグメント53の車線マスクを表すデータ構造99にまとめ得、追い越し車線である道路セグメント53のうちの車線を識別する。
ガイダンス層14は、タイル73に関連付けられたデータ100と、タイル74に関連付けられたデータ102とを含む。データ100は、タイル73における道路セグメントに対して少なくとも固定された属性101を含む。データ102は、タイル74における道路セグメントに対して少なくとも固定された属性103を含む。タイル73および74における道路セグメントのうち、追い越し車線を有するものがないとすると、第二の属性は、タイル73および74を表すデータ100および102に格納されない。第二の属性を、追い越し車線を有する道路セグメントがないタイルに関連付けられたデータに格納することは要求されない。これによって、過剰な車線属性を実装する格納スペース要件は、適度なままであり得る。
The
図10において、第二の属性は、属性EXPRESS_LANEとして示される。 In FIG. 10, the second attribute is indicated as an attribute EXPRESS_LANE.
第一および第二の属性を用いて、他のマップデータベース構造が使用され得ることが認識される。例示として、第二の属性EXPRESS_LANEは、図10の94、95および99において例示されるさらなるデータ構造によって個々の車線に割り当てられるよりも、むしろ、個々の車線に直接割り当てられ得る。第二の属性を個々の車線に直接割り当てることは、個々の車線がマップデータベースにおいて、個々のマップ特徴として表される場合、特に有用であり得る。 It will be appreciated that other map database structures may be used with the first and second attributes. Illustratively, the second attribute EXPRESS_LANE can be assigned directly to an individual lane, rather than assigned to an individual lane by the additional data structure illustrated at 94, 95 and 99 of FIG. Assigning the second attribute directly to individual lanes can be particularly useful when individual lanes are represented as individual map features in the map database.
図11は、マップデータベースを生成する方法110のフローチャートであり、マップデータベースは、追い越し車線を示す属性を含む。方法は、電子コンピュータシステムによって行われ得る。方法は、道路ネットワークの道路セグメントに関する情報および道路セグメントの車線に関する情報を含む生データを用いる。そのようなデータは、さまざまな納入業者によって提供され、NavteqまたはTeleatlasのようなさまざまなフォーマットを有し得る。方法を用いて、生データは処理され、追い越し車線を示す属性を含むデータベースを形成する。
FIG. 11 is a flowchart of a
111において、生データが検索される。生データは、道路セグメントに関する情報および道路セグメントのどの車線が追い越し車線かに関する情報を含み得る。そのような生データは、例えば、格納スペース限度に起因するか、または効率の悪いアクセスに起因して、乗り物のナビゲーションデバイスにおける直接使用には不適切であるフォーマットを有し得る。 At 111, raw data is retrieved. The raw data may include information about the road segment and information about which lane of the road segment is an overtaking lane. Such raw data may have a format that is inappropriate for direct use in a vehicle navigation device, for example due to storage space limitations or due to inefficient access.
112において、道路セグメントのトポロジーおよびジオメトリ情報が決定される。トポロジーは、道路セグメントの開始ポイントおよび終了ポイントに関する情報、他のマップ特徴への接続に関する情報などを含み得る。ジオメトリ情報は、道路セグメントまたはタイリングのうちの1つのタイルに配置された道路セグメントの一部のジオメトリに関する情報を含み得る。トポロジー情報は、道路セグメントを表すマップデータにおいてリンクを生成するために用いられ得る。 At 112, road segment topology and geometry information is determined. The topology may include information regarding the start and end points of the road segment, information regarding connections to other map features, and the like. The geometry information may include information regarding the geometry of a portion of the road segment located on one of the road segments or tiles of the tiling. The topology information can be used to generate links in map data representing road segments.
113において、道路セグメントは、少なくとも1つの追い越し車線を有するか否かが決定される。道路セグメントが追い越し車線を有さないと決定された場合、追い越し車線を示す属性は、道路セグメントに対して格納される必要はない。方法は、111に戻り得る。 At 113, it is determined whether the road segment has at least one overtaking lane. If it is determined that the road segment does not have an overtaking lane, the attribute indicating the overtaking lane need not be stored for the road segment. The method may return to 111.
道路セグメントが少なくとも1つの追い越し車線を有すると決定された場合、114において、第一の属性EXPRESS_ROADがリンクに割り当てられる。第一の属性は、マップデータにおける続く格納のために登録され得る。第一の属性は、格納され得るが、すぐに格納される必要はない。むしろ、タイルに配置された異なる道路セグメントに割り当てられた第一の属性は、続く格納のために集められ得る。 If it is determined that the road segment has at least one overtaking lane, at 114 a first attribute EXPRESS_ROAD is assigned to the link. The first attribute may be registered for subsequent storage in the map data. The first attribute can be stored, but need not be stored immediately. Rather, the first attributes assigned to the different road segments arranged in the tile can be collected for subsequent storage.
115において、道路セグメントの全ての車線が追い越し車線か否かが決定される。道路セグメントが、追い越し車線でない少なくとも1つの車線を有すると決定された場合、116において、第一の属性EXPRESS_ROADのブーリアンパラメータAllLanesがFALSEに設定される。道路セグメントの全ての車線が追い越し車線であると決定された場合、117において、第一の属性EXPRESS_ROADのブーリアンパラメータAllLanesがTRUEに設定される。パラメータは、マップデータにおける続く格納のために登録され得る。パラメータは、格納され得るが、すぐに格納される必要はない。むしろ、タイルに配置された異なる道路セグメントに割り当てられたそれぞれ設定されたパラメータと共に、第一の属性は、続く格納のために集められ得る。 At 115, it is determined whether all lanes in the road segment are overtaking lanes. If it is determined that the road segment has at least one lane that is not an overtaking lane, at 116, the Boolean parameter Alllanes of the first attribute EXPRESS_ROAD is set to FALSE. If it is determined that all lanes of the road segment are overtaking lanes, at 117, the Boolean parameter Alllanes of the first attribute EXPRESS_ROAD is set to TRUE. The parameter can be registered for subsequent storage in the map data. Parameters can be stored, but need not be stored immediately. Rather, the first attribute can be collected for subsequent storage, with each set parameter assigned to a different road segment located in the tile.
118において、第二の属性EXPRESS_LANEが道路セグメントの車線に割り当てられる。第二の属性は、車線のうちのどの車線が追い越し車線かに基づいて、選択的に割り当てられる。いくつかの実施形態において、属性EXPRESS_LANEは、追い越し車線である車線のみに割り当てられ得る。第二の属性EXPRESS_LANEを道路セグメントの車線に割り当てることは、図10の94、95および99において示される第二の属性を個々の車線に関連付けるデータ構造を生成することを含み得る。このデータ構造は、バイナリ列の数字が道路セグメントの個々の車線を表す車線マスクフォーマットを有し得る。あるいは、第二の属性EXPRESS_LANEは、車線マスクを要求せずに、道路セグメントの個々の車線と直接関連付けられるように格納され得る。 At 118, a second attribute EXPRESS_LANE is assigned to the lane of the road segment. The second attribute is selectively assigned based on which lane of the lane is the overtaking lane. In some embodiments, the attribute EXPRESS_LANE may be assigned only to lanes that are overtaking lanes. Assigning the second attribute EXPRESS_LANE to the road segment lane may include generating a data structure that associates the second attribute shown at 94, 95, and 99 of FIG. 10 with the individual lane. This data structure may have a lane mask format in which binary string numbers represent individual lanes of a road segment. Alternatively, the second attribute EXPRESS_LANE can be stored to be directly associated with the individual lanes of the road segment without requiring a lane mask.
119において、第一の属性EXPRESS_ROADは、マップデータベースのルート層に格納され得る。第二の属性EXPRESS_LANEは、マップデータベースのガイダンス層に格納され得る。 At 119, the first attribute EXPRESS_ROAD may be stored in the root layer of the map database. The second attribute EXPRESS_LANE may be stored in the guidance layer of the map database.
各道路セグメントに対して、個々に第一および第二の属性をマップデータベースに格納することは要求されない。むしろ、タイリングが規定され得、工程111〜118が、まず、タイルに含まれる全ての道路セグメントに対して繰り返され得る。第一の属性が割り当てられるリンクに関する情報および第二属性が割り当てられる車線に関する情報は、工程111〜118がタイルの全ての道路セグメントに対して行われた後、続いて集められ得、格納され得る。この処理は、異なるタイルに対して反復して繰り返され得る。 For each road segment, it is not required to store the first and second attributes individually in the map database. Rather, tiling can be defined and steps 111-118 can be first repeated for all road segments included in the tile. Information about the link to which the first attribute is assigned and information about the lane to which the second attribute is assigned can be subsequently collected and stored after steps 111-118 have been performed for all road segments of the tile. . This process can be repeated iteratively for different tiles.
方法において、タイルが少なくとも1つの追い越し車線を有する道路セグメントを有さない場合、第一の属性または第二の属性をマップデータベースにおけるタイルを表すデータに格納することは要求されない。 In the method, if the tile does not have a road segment with at least one overtaking lane, it is not required to store the first attribute or the second attribute in the data representing the tile in the map database.
さらに、いくつかの実施形態において、道路セグメントの全ての車線が追い越し車線の場合、第二の属性を道路セグメントの車線に対して格納することが要求されない場合がある。つまり、方法は、工程117から直接工程119に進み得る。したがって、いくつかの実施形態において、マップデータベースは、第二の属性を少なくとも1つの追い越し車線を有するが、追い越し車線から全体は構成されない道路セグメントの車線のみに対して含み得る。
Further, in some embodiments, if all lanes of a road segment are overtaking lanes, it may not be required to store the second attribute for the lane of the road segment. That is, the method can proceed directly from
図11の方法を用いて生成されたマップデータベースは、さまざまなフォーマットを有し得る。限定としてよりは、むしろ例示として、マップデータベースは、NDSに従って設定されたマップデータベースであり得る。第一の属性および第二の属性は、NDSによって規定された柔軟な属性であり得る。 The map database generated using the method of FIG. 11 can have a variety of formats. By way of example rather than limitation, the map database may be a map database configured according to NDS. The first attribute and the second attribute may be flexible attributes defined by NDS.
図11の方法を用いて生成されたマップデータベースは、実施形態に従う乗り物のナビゲーションデバイスにおいて用いられ得る。 The map database generated using the method of FIG. 11 may be used in a vehicle navigation device according to an embodiment.
実施形態に従うデバイスおよび方法が詳細に説明されたが、改変が他の実施形態において実装され得る。例示として、実施形態のデバイスおよび方法によって用いられるマップデータベースがタイリングに従って組織化されたデータを格納することは要求されない。タイリングがマップデータベースを組織化するために用いられた場合、タイリングは、スクエアタイリングである必要はなく、道路ネットワークを含むいずれか他のタイリングであり得る。異なるタイリングは、ルートおよびガイダンス機能のために用いられ得る。ルート層に対して規定されたタイリングは、タイルを含み得、これらのタイルは、サイズおよび/または形状がガイダンス層に対して規定された別のタイリングの他のタイルと異なり得る。 Although devices and methods according to embodiments have been described in detail, modifications may be implemented in other embodiments. By way of example, the map database used by the devices and methods of the embodiments is not required to store data organized according to tiling. If tiling is used to organize the map database, the tiling need not be square tiling, but can be any other tiling that includes a road network. Different tilings can be used for route and guidance functions. The tiling defined for the root layer may include tiles, which may be different from other tiles in another tiling defined in size and / or shape for the guidance layer.
さらなる例示として、第一の属性は、ブーリアンパラメータを有し得るが、第一の属性は、別のパラメータタイプのパラメータを有し得る。例示として、第一の属性は、整数パラメータタイプのパラメータを有し得る。パラメータは、それぞれの道路セグメントの車線の数を示し得る。 As a further illustration, the first attribute may have a Boolean parameter, but the first attribute may have a parameter of another parameter type. Illustratively, the first attribute may have an integer parameter type parameter. The parameter may indicate the number of lanes in each road segment.
さらなる例示として、実施形態のマップデータベースは、少なくとも1つの追い越し車線を含むいずれかの道路セグメントに対して第二の属性を含み得るが、他の実施形態において、マップデータベースは、追い越し車線から全体が構成される道路セグメントの車線に対して第二の属性を有さない場合がある。この場合、追い越し車線である車線に関する情報は、第一の属性およびそのパラメータから派生され得る。 By way of further illustration, the map database of the embodiment may include a second attribute for any road segment that includes at least one overtaking lane, while in other embodiments the map database is entirely from the overtaking lane. The configured road segment lane may not have a second attribute. In this case, information regarding the lane that is the overtaking lane may be derived from the first attribute and its parameters.
発明の実施形態は、乗り物のナビゲーションデバイスとして用いられ得る。 Embodiments of the invention may be used as a vehicle navigation device.
Claims (15)
該乗り物のナビゲーションデバイスは、
マップデータベース(10)であって、該マップデータベース(10)は、マップデータを格納し、該マップデータは、リンクおよび属性(63、64、83、86、93、98)を含み、該リンクは、道路セグメント(51〜59)を表し、第一の属性(63、64、83、86)は、それぞれ該リンクのサブセットに割り当てられることによって、該サブセットに含まれる該リンクが少なくとも1つの追い越し車線を有することを示し、第二の属性(93、98)は、それぞれ該サブセットに含まれる該リンクの少なくとも一部の車線に割り当てられることによって、該それぞれの道路セグメント(51〜53)のどの車線が追い越し車線かを示し、該第二の属性(93、98)は、該第一の属性(63、64、83、86)とは異なる、マップデータベース(10)と、
処理ユニット(2)であって、該処理ユニット(2)は、該マップデータベース(10)に結合され、該第一の属性(63、64、83、86)に少なくとも基づいてルートサーチを行うことと、ルートガイダンス情報の出力を、ユーザーインターフェース(4)を介して少なくとも該第二の属性(93、98)に基づいて制御することとを行うように構成されている、処理ユニット(2)と
を含む、乗り物のナビゲーションデバイス。 A vehicle navigation device,
The vehicle navigation device is
A map database (10), wherein the map database (10) stores map data, the map data including links and attributes (63, 64, 83, 86, 93, 98), , Representing road segments (51-59), and the first attributes (63, 64, 83, 86) are each assigned to a subset of the links so that the links included in the subset have at least one overtaking lane And the second attribute (93, 98) is assigned to at least a part of the lanes of the links included in the subset, so that which lane of the respective road segment (51-53) Indicates the overtaking lane and the second attribute (93, 98) is different from the first attribute (63, 64, 83, 86) A map database (10),
A processing unit (2) that is coupled to the map database (10) and performs a route search based at least on the first attribute (63, 64, 83, 86) And a processing unit (2) configured to control the output of route guidance information based on at least the second attribute (93, 98) via the user interface (4); Including vehicle navigation devices.
前記第一の属性(63、64、83、86)および前記第二の属性(93、98)は、該データ構造(62、82、85、88、90、92、97、101、103)から分離して格納される、請求項1に記載の乗り物のナビゲーションデバイス。 The map database (10) includes a data structure (62, 82, 85, 88, 90, 92, 97, 101, 103) for each link, and the data structure (62, 82, 85, 88, 90). , 92, 97, 101, 103) have a fixed number of data fields for the link, and a value is set for each data field,
The first attribute (63, 64, 83, 86) and the second attribute (93, 98) are obtained from the data structure (62, 82, 85, 88, 90, 92, 97, 101, 103). The vehicle navigation device of claim 1, stored separately.
前記処理ユニット(2)は、リンクに対するルートサーチを、該第一の属性(63、64、83、86)と該ブーリアンパラメータとの両方に基づいて行うように構成されている、請求項1に記載の乗り物のナビゲーションデバイス。 The first attribute (63, 64, 83, 86) has a Boolean parameter;
The processing unit (2) is configured to perform a route search for a link based on both the first attribute (63, 64, 83, 86) and the Boolean parameter. The described vehicle navigation device.
前記処理ユニット(2)は、該第二の部分(14)から検索され、該第一の部分(11)に格納されたデータから独立しているデータに基づいて、前記ルートガイダンス情報の出力を制御するように構成されている、請求項1に記載の乗り物のナビゲーションデバイス。 The map database (10) includes a first part (11) and a second part (14), and the first attribute (63, 64, 83, 86) is the first part (11). And the second attribute (93, 98) is stored in the second part (14),
The processing unit (2) outputs the route guidance information based on data retrieved from the second part (14) and independent of the data stored in the first part (11). The vehicle navigation device of claim 1, wherein the vehicle navigation device is configured to control.
前記マップデータベース(10)は、リンクによって表された該道路セグメント(51〜53)の少なくとも1つが少なくとも1つの追い越し車線を有する場合ののみ、該タイリングのタイル(50、71〜74)に配置された該リンク(51〜53)に対する前記第一の属性(63、64、83、86)を含む、請求項1〜6のうちのいずれか一項に記載の乗り物のナビゲーションデバイス。 Each road segment (51-59) is located on at least one tile (50, 71-74) of tiling,
The map database (10) is placed on the tiling tile (50, 71-74) only if at least one of the road segments (51-53) represented by links has at least one overtaking lane 7. A vehicle navigation device according to any one of the preceding claims, comprising the first attribute (63, 64, 83, 86) for said linked link (51-53).
前記マップデータベース(10)は、該さらなるタイリングのタイル(71〜74)に配置された道路セグメント(51〜59)の少なくとも1つが少なくとも1つの追い越し車線を有する場合にのみ、該さらなるタイリングの該タイル(71〜74)に配置された該道路セグメント(51〜59)の車線に対する前記第二の属性(93、98)を含む、請求項7に記載の乗り物のナビゲーションデバイス。 Each link is located on at least one tile (71-74) of further tiling,
The map database (10) can be used for the further tiling only if at least one of the road segments (51-59) located in the further tiling tile (71-74) has at least one overtaking lane. The vehicle navigation device of claim 7, comprising the second attribute (93, 98) for a lane of the road segment (51-59) located on the tile (71-74).
該方法は、
道路セグメント(51〜59)に関する情報と各道路セグメントの車線に関する情報とを含むデータを検索することと、
複数の道路セグメント(51〜59)に対して、
該道路セグメント(51〜59)が少なくとも1つの追い越し車線を有するか否かを決定することと、
該道路セグメント(51〜59)の少なくとも1つの車線が追い越し車線である場合、第一の属性(63、64、83、86)を該道路セグメント(51〜59)を表すリンクに選択的に割り当てることと、
第二の属性(93、98)を該道路セグメント(51〜59)の車線に選択的に割り当てることであって、該第二の属性は(93、98)は、該道路セグメント(51〜59)のどの車線が追い越し車線かに基づいて選択的に割り当てられる、ことと
を行うことと、
該第一の属性(63、64、83、86)および第二の属性(93、98)を該マップデータベース(10)に格納することと
を含む、方法。 A method for generating a map database (10) comprising:
The method
Searching for data including information on road segments (51-59) and information on lanes of each road segment;
For multiple road segments (51-59)
Determining whether the road segment (51-59) has at least one overtaking lane;
If at least one lane of the road segment (51-59) is an overtaking lane, the first attribute (63, 64, 83, 86) is selectively assigned to the link representing the road segment (51-59). And
Selectively assigning a second attribute (93, 98) to the lane of the road segment (51-59), wherein the second attribute (93, 98) is the road segment (51-59). ) To be selectively assigned based on which lane is the overtaking lane,
Storing the first attribute (63, 64, 83, 86) and the second attribute (93, 98) in the map database (10).
該タイリングの各タイル(50、71〜74)に対して、第一の属性(63、64、83、86)は、該タイリングの前記それぞれのタイル(50、71〜74)に含まれる少なくとも1つの道路セグメント(51〜59)が少なくとも1つの追い越し車線を含む場合にのみ、前記マップデータベース(10)に格納される、請求項9〜11のうちのいずれか一項に記載の方法。 A tiling is defined that includes a plurality of tiles (50, 71-74) and covers the road segments (51-59),
For each tile (50, 71-74) of the tiling, a first attribute (63, 64, 83, 86) is included in the respective tile (50, 71-74) of the tiling. The method according to any one of claims 9 to 11, wherein the map database (10) is stored only if at least one road segment (51-59) comprises at least one overtaking lane.
該さらなるタイリングの各タイル(71〜74)に対して、第二の属性(93、98)は、該さらなるタイリング(71〜74)の前記それぞれのタイルに含まれる少なくとも1つの道路セグメント(51〜59)が少なくとも1つの追い越し車線を含む場合にのみ、前記マップデータベース(10)に格納される、請求項12に記載の方法。 A further tiling comprising a plurality of tiles (71-74) and covering said road segment (51-59) is defined;
For each tile (71-74) of the further tiling (93, 98), a second attribute (93, 98) includes at least one road segment included in the respective tile of the further tiling (71-74) ( Method according to claim 12, wherein 51-59) is stored in the map database (10) only if it contains at least one overtaking lane.
ルートサーチを行うことであって、該ルートサーチを行うことは、
追い越し車線に対する好みまたは回避のオプションの起動を監視することと、該好みまたは回避のオプションが起動された場合、リンクに割り当てられた該第一の属性(63、64、83、86)に基づいて、ルートのコストを選択的に調節することと
を含む、ことと、
ルートガイダンス情報を該第二の属性(93、98)に基づいて出力することと
を含む、方法。 A method of processing data stored in a map database (10), wherein the map database (10) includes links representing road segments (51 to 59) and first attributes (63, 64, 83, 86). ) And a second attribute (93, 98), the first attribute (63, 64, 83, 86) is assigned to a subset of links (51-53), the second attribute (93, 98) are assigned to at least some lanes of the subset of the links (51-53), the method comprising:
Performing a route search, and performing the route search,
Monitoring activation of a preference or avoidance option for an overtaking lane and, if the preference or avoidance option is activated, based on the first attribute (63, 64, 83, 86) assigned to the link Selectively adjusting the cost of the route, and
Outputting route guidance information based on the second attribute (93, 98).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11153921.9A EP2487461B1 (en) | 2011-02-09 | 2011-02-09 | Vehicle navigation device and method |
| EP11153921.9 | 2011-02-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012168169A true JP2012168169A (en) | 2012-09-06 |
| JP6012183B2 JP6012183B2 (en) | 2016-10-25 |
Family
ID=44117220
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012010092A Active JP6012183B2 (en) | 2011-02-09 | 2012-01-20 | Vehicle navigation device and method |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8700330B2 (en) |
| EP (1) | EP2487461B1 (en) |
| JP (1) | JP6012183B2 (en) |
| KR (1) | KR101940613B1 (en) |
| CN (1) | CN102636176B (en) |
| CA (1) | CA2763228C (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018126079A1 (en) * | 2016-12-30 | 2018-07-05 | DeepMap Inc. | High definition map and route storage management system for autonomous vehicles |
| JP2021082331A (en) * | 2016-11-18 | 2021-05-27 | ウェイモ エルエルシー | Dynamic route determination for autonomous vehicle |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9157751B2 (en) * | 2012-11-09 | 2015-10-13 | Here Global B.V. | Navigation system and method |
| US9647930B2 (en) * | 2012-11-26 | 2017-05-09 | Telefonaktiebolaget Lm Ericsson (Publ) | Route determination in a multi-hop network using multiple routing metrics |
| US9121719B2 (en) * | 2013-03-15 | 2015-09-01 | Abalta Technologies, Inc. | Vehicle range projection |
| US9689690B2 (en) * | 2015-07-13 | 2017-06-27 | Here Global B.V. | Indexing routes using similarity hashing |
| CN108700876B (en) * | 2015-11-04 | 2021-08-27 | 祖克斯有限公司 | Remote operation system and method for autonomous vehicle trajectory modification |
| US9851212B2 (en) | 2016-05-06 | 2017-12-26 | Ford Global Technologies, Llc | Route generation using road lane line quality |
| DE102016220308A1 (en) * | 2016-10-18 | 2018-04-19 | Continental Automotive Gmbh | System and method for generating digital road models from aerial or satellite imagery and vehicle-acquired data |
| WO2019006722A1 (en) * | 2017-07-06 | 2019-01-10 | 驭势(上海)汽车科技有限公司 | Road characterization method, and method and device for displaying road information |
| CN109584706B (en) * | 2018-10-31 | 2021-08-03 | 百度在线网络技术(北京)有限公司 | Electronic map lane line processing method, device and computer readable storage medium |
| US10346693B1 (en) * | 2019-01-22 | 2019-07-09 | StradVision, Inc. | Method and device for attention-based lane detection without post-processing by using lane mask and testing method and testing device using the same |
| KR102185690B1 (en) * | 2019-11-28 | 2020-12-02 | 제주대학교 산학협력단 | Method of deciding one-way roads based on 2-SAT in smart cities |
| KR102383421B1 (en) | 2020-12-07 | 2022-04-05 | 김동진 | Mobile phone case |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11183189A (en) * | 1997-12-19 | 1999-07-09 | Aisin Seiki Co Ltd | Mobile information service system |
| JP2005061988A (en) * | 2003-08-12 | 2005-03-10 | Xanavi Informatics Corp | Route search method of navigation device |
| JP2007240338A (en) * | 2006-03-09 | 2007-09-20 | Aisin Aw Co Ltd | Navigation system |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3908425B2 (en) * | 1999-12-24 | 2007-04-25 | アルパイン株式会社 | Navigation device |
| EP1241447A1 (en) * | 2001-03-13 | 2002-09-18 | Matsushita Electric Industrial Co., Ltd. | Information terminal and cartographic information providing system |
| US7818116B1 (en) * | 2002-12-30 | 2010-10-19 | Mapquest, Inc. | Presenting a travel route in a ground-based vehicle |
| JP4727245B2 (en) * | 2005-02-08 | 2011-07-20 | 三菱電機株式会社 | Map information processing device |
| DE102006013389A1 (en) * | 2006-03-23 | 2007-09-27 | Robert Bosch Gmbh | Method for operating a navigation system |
| DE102006057285A1 (en) * | 2006-12-05 | 2008-06-12 | Robert Bosch Gmbh | Method for operating a driver information system, driver information system and data carrier |
| JP4753999B2 (en) * | 2006-12-18 | 2011-08-24 | 三菱電機株式会社 | Navigation device |
| JP5289431B2 (en) * | 2008-04-28 | 2013-09-11 | 三菱電機株式会社 | Navigation device |
-
2011
- 2011-02-09 EP EP11153921.9A patent/EP2487461B1/en active Active
-
2012
- 2012-01-05 CA CA2763228A patent/CA2763228C/en not_active Expired - Fee Related
- 2012-01-20 JP JP2012010092A patent/JP6012183B2/en active Active
- 2012-02-08 KR KR1020120012654A patent/KR101940613B1/en active IP Right Grant
- 2012-02-09 CN CN201210028474.8A patent/CN102636176B/en active Active
- 2012-02-09 US US13/369,966 patent/US8700330B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11183189A (en) * | 1997-12-19 | 1999-07-09 | Aisin Seiki Co Ltd | Mobile information service system |
| JP2005061988A (en) * | 2003-08-12 | 2005-03-10 | Xanavi Informatics Corp | Route search method of navigation device |
| JP2007240338A (en) * | 2006-03-09 | 2007-09-20 | Aisin Aw Co Ltd | Navigation system |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021082331A (en) * | 2016-11-18 | 2021-05-27 | ウェイモ エルエルシー | Dynamic route determination for autonomous vehicle |
| US11537133B2 (en) | 2016-11-18 | 2022-12-27 | Waymo Llc | Dynamic routing for autonomous vehicles |
| JP7266053B2 (en) | 2016-11-18 | 2023-04-27 | ウェイモ エルエルシー | Dynamic route determination for autonomous vehicles |
| WO2018126079A1 (en) * | 2016-12-30 | 2018-07-05 | DeepMap Inc. | High definition map and route storage management system for autonomous vehicles |
| US10353931B2 (en) | 2016-12-30 | 2019-07-16 | DeepMap Inc. | High definition map and route storage management system for autonomous vehicles |
| US10572514B2 (en) | 2016-12-30 | 2020-02-25 | DeepMap Inc. | High definition map and route storage management system for autonomous vehicles |
| US11068516B2 (en) | 2016-12-30 | 2021-07-20 | DeepMap Inc. | High definition map and route storage management system for autonomous vehicles |
| US11775570B2 (en) | 2016-12-30 | 2023-10-03 | Nvidia Corporation | High definition map and route storage management system for autonomous vehicles |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2763228C (en) | 2014-12-02 |
| KR101940613B1 (en) | 2019-04-10 |
| CN102636176B (en) | 2017-03-01 |
| KR20120092042A (en) | 2012-08-20 |
| CA2763228A1 (en) | 2012-08-09 |
| US20120203459A1 (en) | 2012-08-09 |
| EP2487461B1 (en) | 2015-10-07 |
| US8700330B2 (en) | 2014-04-15 |
| EP2487461A1 (en) | 2012-08-15 |
| CN102636176A (en) | 2012-08-15 |
| JP6012183B2 (en) | 2016-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6012183B2 (en) | Vehicle navigation device and method | |
| JP3842799B2 (en) | Map data providing device | |
| WO2014171110A1 (en) | Map difference data delivery system, map difference data delivery device, map data holding device, update management server, and map difference extraction server | |
| JPWO2004008073A1 (en) | Navigation method, processing method for navigation system, map data management device, map data management program, and computer program | |
| JPH11148831A (en) | Method and device for displaying current vehicle position | |
| JP2007132711A (en) | Navigation device, map server, map update system, map update method, and map update program | |
| JP6916158B2 (en) | Demand forecast information display control method, display control device, and display control program | |
| JP2021162324A (en) | Information processing device, route guidance device, program, and information processing method | |
| JP2007108034A (en) | Navigation device, map information updating technique, and map information updating program | |
| JP2011047662A (en) | Navigation system | |
| WO2015059872A1 (en) | Map data delivery system, server, and navigation device | |
| US20060052935A1 (en) | Navigation device, information input/output device, navigation system, navigation display method, and navigation display program | |
| JP5349023B2 (en) | Navigation device | |
| WO2015060863A1 (en) | Navigation guidance including provision of stops | |
| JP2006309581A (en) | Navigation system, cache memory and cache management method | |
| US8676507B2 (en) | Vehicle navigation system | |
| WO2022074792A1 (en) | Map data update device and map data update method | |
| US20130002658A1 (en) | Vehicle navigation device and method | |
| JP7447272B2 (en) | Map provision system | |
| JP6354292B2 (en) | Information processing apparatus for vehicle | |
| JP4930795B2 (en) | Navigation device and navigation program | |
| JP2005308542A (en) | Navigation system | |
| JP2021162343A (en) | Information processing device, route guidance device, program, and information processing method | |
| JP2021162340A (en) | Information processing device, route guidance device, program, and information processing method | |
| JP2021162341A (en) | Information processing device, route guidance device, program, and information processing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160309 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160822 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6012183 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |