JP2010263953A - 運動分析装置、プログラム及び方法、並びに、運動分析システム - Google Patents
運動分析装置、プログラム及び方法、並びに、運動分析システム Download PDFInfo
- Publication number
- JP2010263953A JP2010263953A JP2009115720A JP2009115720A JP2010263953A JP 2010263953 A JP2010263953 A JP 2010263953A JP 2009115720 A JP2009115720 A JP 2009115720A JP 2009115720 A JP2009115720 A JP 2009115720A JP 2010263953 A JP2010263953 A JP 2010263953A
- Authority
- JP
- Japan
- Prior art keywords
- motion
- analysis
- exercise
- predetermined
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000033001 locomotion Effects 0.000 title claims abstract description 244
- 238000004458 analytical method Methods 0.000 title claims abstract description 183
- 238000000034 method Methods 0.000 title description 46
- 238000005259 measurement Methods 0.000 claims abstract description 14
- 230000003595 spectral effect Effects 0.000 claims abstract description 13
- 238000001228 spectrum Methods 0.000 claims description 69
- 230000002159 abnormal effect Effects 0.000 claims description 50
- 238000012545 processing Methods 0.000 abstract description 13
- 238000004364 calculation method Methods 0.000 description 46
- 238000006243 chemical reaction Methods 0.000 description 25
- 230000001186 cumulative effect Effects 0.000 description 25
- 238000013500 data storage Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 14
- 238000001514 detection method Methods 0.000 description 12
- 238000010586 diagram Methods 0.000 description 12
- 238000005070 sampling Methods 0.000 description 12
- 230000001133 acceleration Effects 0.000 description 11
- 235000019577 caloric intake Nutrition 0.000 description 11
- 238000004891 communication Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 9
- 238000007781 pre-processing Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000009471 action Effects 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 230000036541 health Effects 0.000 description 3
- 238000007726 management method Methods 0.000 description 3
- 238000000611 regression analysis Methods 0.000 description 3
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- JVTAAEKCZFNVCJ-UHFFFAOYSA-N lactic acid Chemical compound CC(O)C(O)=O JVTAAEKCZFNVCJ-UHFFFAOYSA-N 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 239000004310 lactic acid Substances 0.000 description 1
- 235000014655 lactic acid Nutrition 0.000 description 1
- 238000012417 linear regression Methods 0.000 description 1
- 230000003183 myoelectrical effect Effects 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 238000010223 real-time analysis Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000010183 spectrum analysis Methods 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1123—Discriminating type of movement, e.g. walking or running
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/1036—Measuring load distribution, e.g. podologic studies
- A61B5/1038—Measuring plantar pressure during gait
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7253—Details of waveform analysis characterised by using transforms
- A61B5/726—Details of waveform analysis characterised by using transforms using Wavelet transforms
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
- A63B2024/0065—Evaluating the fitness, e.g. fitness level or fitness index
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
- A63B2024/0071—Distinction between different activities, movements, or kind of sports performed
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/803—Motion sensors
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2230/00—Measuring physiological parameters of the user
- A63B2230/75—Measuring physiological parameters of the user calorie expenditure
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- Dentistry (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Physical Education & Sports Medicine (AREA)
- Physiology (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
【課題】 人や物などの物体の運動に係る分析において、少ない処理量で精度の高い分析を行う。
【解決手段】 本発明は、所定の運動を繰り返し行う物体に係る運動量を測定するセンサ装置と、センサ装置の測定結果に基づいて物体における所定の運動に係る分析を行う運動分析装置とを備える運動分析システムに関する。そして、運動分析装置は、センサ装置が測定した運動量の時系列データを保持する手段と、保持した時系列データが示す波形について、所定の関数を用い、周波数ごとに時系列ごとののスペクトル強度分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析する手段と、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、物体における所定の運動に係る所定の物理量を分析する手段とを有することを特徴とする。
【選択図】 図1
【解決手段】 本発明は、所定の運動を繰り返し行う物体に係る運動量を測定するセンサ装置と、センサ装置の測定結果に基づいて物体における所定の運動に係る分析を行う運動分析装置とを備える運動分析システムに関する。そして、運動分析装置は、センサ装置が測定した運動量の時系列データを保持する手段と、保持した時系列データが示す波形について、所定の関数を用い、周波数ごとに時系列ごとののスペクトル強度分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析する手段と、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、物体における所定の運動に係る所定の物理量を分析する手段とを有することを特徴とする。
【選択図】 図1
Description
本発明は、運動分析装置、プログラム及び方法、並びに、運動分析システムに関し、例えば、所定の運動を繰り返し行う人や物などの物体の運動のペースなどを分析するシステムに適用することができる。
健康状態の管理やリハビリテーションなど人の状態を認識して利用するために、人体に運動センサを装着し運動のペースや運動量を検出する方法は、従来広く考案されている。
特許文献1〜4では腰部や脚部、腕部といった箇所に加速度センサを取り付け、歩行動作時に得られる加速度の時間的変化による波形をフーリエ変換により周波数成分に変換し、スペクトル強度がピークとなる点の周波数を1回の運動周期(歩行の場合、腰部にセンサを装着すれば2歩が1周期、脚部にセンサを装着すれば1歩が1周期となる)、その点のスペクトル強度を運動の大きさとして扱い、運動のペースなどを算出している。
また特許文献5、6及び特許文献7においては、運動一周期ごとの波形の形状に着目し、ピーク値間隔やゼロクロス点を使った方法を用いて運動一周期の長さについてペースを示す指標として取得する技術について記載されている。
しかしながら、上述の特許文献1〜7はいずれも運動の対象として1回の運動周期が1Hz〜3.5Hz程度の歩行を扱っており、例えばスポーツジムにおいてダンベルを持ち上げたりウェイトマシンを使ってトレーニングしたり、または日常生活で物を持ち上げたり機器を操作したりするといった、歩行動作よりも運動一周期の長い運動や、一周期の加速度波形の形状が複雑な運動については適用が難しい。健康状態管理やリハビリテーション、工員の作業内容など人の状態を管理することを目的とした場合、歩行動作以外の運動も広く扱う必要がある。
特許文献1〜4の記載技術をはじめフーリエ変換を基にした方法において、得られるペースの周波数の範囲は、センサがデータを取得するサンプリングレートの1/2(ナイキスト周波数)までで、分解能はセンサがデータを取得するサンプリングレートとフーリエ変換を適用する時間窓に依存する。ペースの分解能を高くするためにはセンサのサンプリングレートを低くするかフーリエ変換の時間窓を長くする必要がある。
一般に、歩行のペースはセンサのサンプリングレートと比較して相対的に低すぎることはなく、フーリエ変換による方法を使った分解能で充分に歩行ペースの違いを識別することができる。しかし歩行よりも遅い運動のペースを高分解能で識別するためには、センサのサンプリングレートを低くするか、一つの運動を長時間繰り返す必要がある。サンプリングレートを低くすることは運動の情報を切り捨てることとなり、同じ運動を長時間繰り返すことは現実的な解決とはなりえない。
また、歩行動作よりも速度が遅い運動と一概にいっても動作の種類は多岐に亘り、それぞれの運動におけるセンサによって得られる波形は振幅や周期、形状に大きな違いがある。
特許文献5〜7のようなセンサから得られた波形の形状を利用した方法では、運動一周期分の波形を正確に見極める必要があり、ローパスフィルタを使ったノイズ成分の低減など運動を表す波形の形状を際立たせるための前処理が重要な役割を担うが、複雑な波形から前処理なしでは適切なピーク値やゼロクロス点の取得することは容易ではない。したがって、多様な運動を一括りにしてペースを取得することは容易ではない。
そのため、人や物などの物体の運動に係る分析において、少ない処理量で精度の高い分析を行うことができる運動分析装置、プログラム及び方法、並びに、運動分析システムが望まれている。
第1の運動分析装置は、(1)本発明の所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置と、上記センサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析装置とを備える運動分析システムを構成する上記運動分析装置において、(2)上記センサ装置が測定した運動量の時系列データを保持する時系列データ保持手段と、(3)上記時系列データが示す波形に対して所定の関数を適用して、周波数ごとにスペクトル強度の分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析する波形分析手段と、(4)上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、上記物体における上記所定の運動に係る所定の物理量を分析する運動分析手段とを有することを特徴とする。
第2の本発明の運動分析プログラムは、(1)所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置と、上記センサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析装置とを備える運動分析システムを構成する上記運動分析装置に搭載されたコンピュータを、(2)上記センサ装置が測定した運動量の時系列データを保持する時系列データ保持手段と、(3)上記時系列データが示す波形に対して所定の関数を適用して、周波数ごとにスペクトル強度の分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析する波形分析手段と、(4)上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、上記物体における上記所定の運動に係る所定の物理量を分析する運動分析手段として機能させることを特徴とする。
第3の本発明の運動分析方法は、(1)所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析方法において、(2)時系列データ保持手段、波形分析手段、運動分析手段を有し、(3)上記時系列データ保持手段は、上記センサ装置が測定した運動量の時系列データを保持する時系列データ保持手段と、(4)上記波形分析手段は、上記時系列データが示す波形に対して所定の関数を適用して、周波数ごとにスペクトル強度の分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析し、(5)上記運動分析手段は、上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、上記物体における上記所定の運動に係る所定の物理量を分析することを特徴とする。
第4の本発明の運動分析システムは、(1)所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置と、上記センサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析装置とを備える運動分析システムにおいて、(2)上記運動分析装置として、第1の本発明の運動分析装置を適用したことを特徴とする。
本発明によれば、人や物などの物体の運動に係る分析において、少ない処理量で精度の高い分析を行うことができる。
(A)第1の実施形態
以下、本発明による運動分析装置、プログラム及び方法、並びに、運動分析システムの第1の実施形態を、図面を参照しながら詳述する。
以下、本発明による運動分析装置、プログラム及び方法、並びに、運動分析システムの第1の実施形態を、図面を参照しながら詳述する。
(A−1)第1の実施形態の構成
図1は、第1の実施形態の運動分析システム1の全体構成を示すブロック図である。
図1は、第1の実施形態の運動分析システム1の全体構成を示すブロック図である。
運動分析システム1は、センシング装置10及び運動分析装置20を有している。
センシング装置10は、所定の運動を行うユーザ(以下、「運動ユーザ」という)の運動に係る量(以下、「運動量」という)を測定するための装置で、運動量を測定するセンシング部11と、運動分析装置20に測定結果を送信する通信制御部12を有している。なお、第1の実施形態においては、運動分析システム1において分析対象となる運動は、人間である運動ユーザの運動であるが、センシング装置10を、人間以外の動物や物(例えば、自動車などの乗り物や、工作機械など)など、他の物体に付けて、その物体の運動について分析するようにしても良く、運動分析システム1において分析対象となる物体は限定されないものである。また、運動分析システム1において、分析対象となる運動は、ウェイトマシン(を用いた運動)、歩行など、ある程度反復して繰り返し行われる運動であればその種類は限定されないものである。
センシング装置10は、例えば、上腕や手首、腰部など、運動ユーザの運動のカテゴリに応じて、動きの変動が大きい部位に付けることが望ましいが、その付ける位置は特に限定されないものである。また、センシング装置10は、テープやベルトで運動ユーザに固定するようにしても良いし、運動ユーザのポケットに入れるようにしても良く、運動ユーザに付ける方法は限定されないものである。そして、運動ユーザにセンシング装置10が付けられている状態で、運動ユーザが所定の運動を行うと、センシング装置10自体も運動ユーザの運動にともなって運動することになるため、センシング装置10自体の運動量を運動ユーザの運動量とみなすことができる。以下の説明では、センシング装置10では自己の加速度を運動量として測定するものとするが、単位時間あたりの移動量や移動速度など他の物理量を適用するようにしても良い。
センシング部11は、運動ユーザの運動量の測定を行い、その測定結果のデータ(以下、「運動データ」という)を通信制御部12を介して運動分析装置20に送信する機能を担っている。センシング部11は、既存の加速度センサなどを用いて、運動ユーザの運動に伴う加速度を所定の周期(以下、「サンプリング周期」という)ごとに計測するものとする。なお、センシング部11はサンプリング周期に関係なく加速度を測定して、運動分析装置20側で、時系列ごとに運動データ抽出して時系列データ(以下、「時系列運動データ」という)を形成するようにしても良い。以下の説明では、センシング部11は、3軸加速度センサを適用するものとして説明するが、運動によって時間的変化を観察することのできるセンサ、例えば角速度センサや筋電位センサ、傾きセンサ、ドップラーレーダー、映像からのモーションキャプチャ、または1軸、2軸加速度センサを使用してもよく、さらに複数個所にセンサを装着し、各センサの値を統合して分析したり特徴が大きい値を選択したりして使用してもよい。
通信制御部12は、運動分析装置20と通信するためのインタフェースの機能を担っており、センシング部11から与えられた運動データを運動分析装置20に送信する。
運動分析装置20は、センシング装置10から運動データを取得し、運動データを分析して、運動ユーザがおこなった運動に係る分析を行うものであり、通信制御部21、データ蓄積部22、範囲情報記憶部23、演算部24、出力部25を有している。
運動分析装置20は、パソコンなどの情報処理装置(1台に限定されず、複数台を分散処理し得るようにしたものであっても良い。)上に、実施形態の運動分析プログラム(固定データを含む)をインストールすることにより、構築されるものであるが、機能的には図1のように表すことができる。
通信制御部21は、センシング装置10と通信するためのインタフェースの機能を担っており、センシング装置10から取得した運動データをデータ蓄積部22に与える。なお、センシング装置10と運動分析装置20との間の通信は、有線でも無線でも良く、その方法は限定されないものである。また、センシング装置10から運動分析装置20への運動データの移動は、必ずしも通信によりオンラインで行う必要はなく、CD−ROMやハードディスク等の媒体を用いてオフラインで移動させるようにしても良く、その方法は限定されないものである。また、図1では、運動データは運動分析装置20側のデータ蓄積部22に蓄積するようにしているが、センシング装置10側で別途蓄積手段を備えて運動データを蓄積した後に、オンライン又はオンラインで運動分析装置20側に移動するようにしても良い。
データ蓄積部22は、センシング装置10から取得した運動データを蓄積して記憶することにより、運動データに基づいた時系列運動データを保持する手段である。データ蓄積部22では、センシング装置10からの取得時刻又はセンシング装置10における測定時刻に対応付けて運動データを記憶するようにしても良いし、時系列順に運動データを記憶するようにしても良い。
範囲情報記憶部23は、運動分析装置20において分析対象の運動に係る情報を記憶する記憶手段であり、具体的には、分析対象の運動をカテゴリごとに分けてその運動カテゴリのペースの最小値と最大値を格納する。
図2は、範囲情報記憶部23に記憶される情報の例について示した説明図である。
範囲情報記憶部23には、図2のように運動カテゴリごとのペースの最小値と最大値が予め格納されているものとする。ペースの最小値と最大値の算出方法としては、対象となる運動カテゴリの運動を可能な限り遅く、早く動作することを一定時間繰り返し、時間当たりの運動回数の逆数を目測によって求めるなどの方法を用いて算出して、予め登録しておくようにしても良い。図4のカテゴリは一例であり、他の運動カテゴリを用意してもよいし、「歩行」を「早歩き」「徘徊」などに分けるなど、カテゴリを細分化したり階層化したりするようにしても良く、その表現方法は限定されないものである。
図2では、例えば、「走行」のペースは2.0〜3.5Hz、「ウェイトマシン」のペースは、0.1〜0.5Hzとしている。
なお、図2では、運動カテゴリごとに、ペースの最小値と最大値を用いて、範囲を示しているが、最小値だけを範囲の下限として登録し、最大値の登録を省略するようにしても良い。
演算部24は、範囲情報記憶部23に記憶されたデータを利用して、データ蓄積部22に記憶された時系列運動データを分析し、その分析結果を、出力部25に与えて出力する。
以下の説明において、演算部24では、例えば、運動ユーザが、センシング装置10を付けてウェイトマシンを用いた運動を行った場合には、範囲情報記憶部23に記憶されている「ウェイトマシン」のペース「0.1〜0.5Hz」を利用して、データ蓄積部22に記憶された時系列データを分析し、運動ユーザがどの程度のペース(以下、「運動ペース」という)でウェイトマシンを用いた運動を行っているかを分析するものとして説明する。
演算部24が分析対象とする時系列運動データは、リアルタイムにセンシング装置10から送られる運動データとしても良いし、予めデータ蓄積部22に蓄積された時系列運動データを用いて非リアルタイムに分析を行うようにしても良い。
演算部24が、リアルタイムにセンシング装置10から送られる運動データの分析を行う場合には、例えば、現在時点から所定時間前までの間にセンシング装置10から与えられた運動データを分析するようにしても良い。このように、演算部24が分析対象とする運動データの範囲や、分析を行うタイミングは限定されないものである。
また、演算部24において、分析対象となる運動カテゴリは、予め運動分析装置20を操作するユーザなどにより設定するようにしても良いし、センシング装置10に別途ボタン等の入力部を設け、運動ユーザに運動を開始する前に、これから行う運動カテゴリに係る情報を入力させるようにしても良い。このように、演算部24において、分析対象となる運動カテゴリの指定方法は限定されないものである。
なお、演算部24における運動データの分析内容の詳細は後述する動作説明において詳述する。
出力部25は、運動分析システム1における処理結果を出力する出力手段であり、図1においては、演算部24による処理結果を出力する。出力部25は、ディスプレイ等の表示装置に表示出力させたり、ディスク装置等の記憶装置に記憶させたり、プリンタ等の印刷装置に印刷出力させたりする構成としてもよく、その出力方法は問われないものである。
(A−2)第1の実施形態の動作
次に、以上のような構成を有する第1の実施形態の運動分析システム1の動作(実施形態の運動分析方法)を説明する。
次に、以上のような構成を有する第1の実施形態の運動分析システム1の動作(実施形態の運動分析方法)を説明する。
図3は、運動分析装置20における運動データの分析に係る動作について示したフローチャートである。
なお、範囲情報記憶部23には、図2に示す内容が格納されているものとする。
また、ここでは、運動ユーザは、腕を動かす運動を行うウェイトマシンを行うものとし、さらにセンシング装置10は運動ユーザの二の腕に付けられているものとして説明する。また、演算部24において、分析対象となる運動カテゴリは、ウェイトマシンであることが予め、運動分析装置20を操作するユーザなどにより設定されているものとして説明する。
まず、運動ユーザがセンシング装置10を付けてウェイトマシンを用いた運動を行ったものとすると、その運動データが、センシング装置10から運動分析装置20に送信され、データ蓄積部22に運動時系列データとして蓄積される(S101)。
次に、演算部24では、分析前の前処理として、データ蓄積部22に蓄積された運動データ(加速度量の時系列データ)の波形の切り出しが行われる(S102)。なお、はじめからデータ蓄積部22に蓄積された時系列運動データが、分析対象となる運動カテゴリ(ここではウェイトマシン)に係る運動データのみで構成されていると分かっている場合には、ステップS102の工程は省略するようにしても良い。
図4は、ステップS102において、演算部24により切り出された波形の例について示したグラフである。
以下の説明においては、演算部24は、図4に示す時系列運動データが切り出され、分析されるものとして説明する。また、図4においては、時系列運動データにおけるサンプリング周期は、20msecであるものとする。なお、サンプリング周期は、運動ユーザが行う運動カテゴリに応じて変更するようにしても良く、限定されないものである。
ステップS102における波形の切り出し方法は、分析対象とする運動カテゴリの波形が他の運動の波形との差異を明確にすることができれば一つの運動の始点と終点で切り出すことが望ましいが、他の運動との差異があいまいである場合は任意の時間間隔で切り出してもよく、限定されないものである。例えば、予め、運動ユーザが分析対象となる運動カテゴリの運動を開始した時間タイミングや終了したタイミングが分かっている場合には、上述のステップS102の波形の切り出しは、運動ユーザが分析対象となる運動を行っている時間帯の中で任意の時間の波形の切り出しを行うようにしても良い。運動分析装置20において、運動ユーザが分析対象となる運動カテゴリの運動を開始した時間タイミングや終了したタイミングを取得する方法としては、例えば、予め運動分析装置20を操作するユーザなどにより設定するようにしても良いし、センシング装置10に別途ボタン等の入力部を設け、運動ユーザに運動を開始するタイミングと終了するタイミングを入力させるようにしても良く、その方法は限定されないものである。また、上述のステップS102において、波形の差異を明確にするための2軸、3軸の波形合成やローパスフィルタの適用などの前処理は、この段階で必要に応じて実行するようにしても良い。
次に、演算部24では、上述のステップS102において切り出された、図4に示す波形に対して、複数の周波数を用いた相関演算によるデータ変換が行われる(S103)。
ステップS103では、具体的には、以下の(1)式を用いたウェーブレット変換が行われる。以下の(1)式において、ψはマザーウェーブレット関数、f(t)は図4に示す波形を表し、aは適用するウェーブレットを伸縮する倍率を表すスケール、bは時間軸方向へのウェーブレットの移動量を表す。なお、演算部24において、使用するマザーウェーブレット関数の種類及びそのパラメータは限定されないものである。なお、ここでの例では、以下の(1)式においては、aは0〜1、bは0〜30(sec)の間を取ることになる。
さらに、Δをサンプリング周期、FCをマザーウェーブレットの中心周波数とすると、以下の(2)式によりスケールaに対応する周波数Faを算出することができる。
さらに、以下の(3)式を適用することで、ウェーブレットの強度に相当するp(スカログラム)が算出できる。なお、ウェーブレットの強度に相当するpは、当該ウェーブレットに係る周波数における「スペクトル強度」にも相当するため、以下の説明において、pを「スペクトル強度」ともいうものとする。

図5は、上述の図4に示す波形に基づいてウェーブレット変換の結果について示したグラフである。
図5のグラフでは、横軸を時間(t)、縦軸を周波数(Fa)、色調(点描の密度)をスペクトル強度(p)として表現したグラフ(スカログラム)である。なお、図5においては、色調が濃い(点描の密度が高い)ほどスペクトル強度が強いことを示している。
ステップS103におけるデータ変換が終了すると、演算部24では、さらに、その変換データからデータの切り出しが行われ、切り出されたデータが取得される(S104)。
図5に示すグラフの左右両端に着目すると、周波数が低くなるにつれて周囲より相対的にスペクトル強度が強い領域がU字状に広がっている様子が見られる。これは周波数が低い、すなわちウェーブレット変換においてマザーウェーブレットの伸張が大きいほど適用する時間長が大きくなるため、運動データが存在しない領域(時間)にまで変換の対象が広がってしまうためである。分析対象となる運動データが十分長い時間のものである場合には、この影響は少ないが、ウェイトマシンの運動のような短時間のデータを扱う場合には無視することができない場合がある。
そこで、ステップS104においては、ウェイトマシンの運動ペースが最低限保証される範囲のみ時間軸方向のデータを切り出す処理を行う。具体的には、ステップS104において、演算部24では、範囲情報記憶部23の範囲情報記憶部に記憶されているカテゴリごとのペースの最小値を利用して両端の情報を切捨てるものとする。なお、上述のステップS104の処理は、演算部24における分析結果の精度を向上させるための工程であるため、要求される精度によっては必須の工程ではなく、省略するようにしても良い。
次に、上述のステップS104における変換データの切り出し処理の詳細について説明する。
図6は、ステップS104において行われる変換データの切り出しについて示した説明図である。
センシング装置10におけるサンプリング周期をΔ(=20msec)、マザーウェーブレットの中心周波数をFC、分析対象となる運動カテゴリの最小周波数をfmin、それに対応するスケールをaminとすると、以下の(4)式で与えられる長さの時間を確保すれば以上の周波数領域の分析が保証されるが、以下の(4)式に示す通り、結果として(切り捨てる時間長)は「1/(fmin・Δ)」で求められることがわかる。なお、ここでは、上述の通り、演算部24において、分析対象となる運動カテゴリは、ウェイトマシンであることが予め設定されているため、fminは、図2に示すようにウェイトマシンの最小周波数である0.1Hzが該当する。
したがって、ステップS104では、図6に示すように、図5に示すグラフに対して、左右両端(時間軸方向)を「1/(fmin・Δ)」の分切り捨てたものを有効領域として切り出して取得するものとする。
上述のステップS104におけるデータの切り出し処理が終了すると、演算部24では、上述のステップS104において切り出した有効領域における周波数ごとのスペクトル強度の累積値を算出する(S105)。
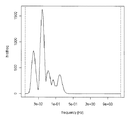
図7は、上述のステップS104において演算部24により算出されたスペクトル強度の累積値を示したグラフ(スカログラム)である。
図7では、縦軸をスペクトル強度の累積値、横軸を周波数として表現している。図7では、図6の色調で表現されていたスペクトル強度のピークがグラフの縦軸に表され、対象とする運動の時間内で総合的にみた周波数成分の大小が観察することができる。なお、ここではスペクトル強度の累積値から周波数成分の大小を評価する方法を述べたが、有効領域の各周波数のそれぞれにおけるスペクトル強度の最大値を算出する方法を用いてもよい。
ステップS105において、演算部24では、上述の図7に示すスペクトル強度の累積値を算出すると、次に、運動ユーザによる運動ペースに係る周波数の基底関数選択、すなわち、運動ユーザによる運動ペースの分析が行われる(S106)。図7のように、低域の周波数成分におけるスペクトル強度の極大値は複数表れる。
図8は、演算部24において、運動ユーザによる運動ペースを分析する様子について示した説明図である。
このうち運動のペースに対応する周波数を抽出するために再び図4の範囲情報記憶部を参照し、運動のカテゴリごとのペースの最小値fminと最大値fmaxを利用する。つまり図8のように、スペクトル強度の累積値のグラフにおいてfmin以上、fmax以下の範囲に絞って極大値の探索を行う。なお、ここでは、上述の通り、演算部24において、分析対象となる運動カテゴリは、ウェイトマシンであることが予め設定されているため、図2の内容に基づいて、fminは0.1Hz、fmaxは、0.5Hzが該当する。
すなわち、ウェイトマシンを用いた運動について、ここでは、ペースの最小値をfmin(0.1Hz)、ペースの最大値をfmax(0.5Hz)としているので、スペクトル強度の累積値の中で、0.1Hz〜0.5Hzの範囲内に、運動ユーザの運動ペースに係る成分が含まれており、その中でもスペクトル強度の累積値が極大となる周波数が、運動ユーザがおこなった運動ペースであると推定することができる。なお、以下の説明において、運動ペースにおけるスペクトル強度、又は、スペクトル強度の累積値を「運動ペーススペクトル」と呼ぶ。
そして、ステップS106において抽出された極大値を取る周波数が運動のペースとして出力される(S107)。
(A−3)第1の実施形態の効果
第1の実施形態によれば、以下のような効果を奏することができる。
第1の実施形態によれば、以下のような効果を奏することができる。
図4のウェイトマシンの運動に係る波形を見ても前処理なしでは適切なピーク値やゼロクロス点の取得が難しいことが分かるため、従来の特許文献1〜7の記載技術では、多様な運動を一括りにしてペースを取得することは難しい。一方、第1の実施形態の運動分析システム1のように、ウェーブレット変換を用いた波形の分析は、基本的には、マザーウェーブレットを拡大縮小、平行移動して足し合わせることで、与えられた入力の波形を表現しようとする手法であり、周波数に合わせてマザーウェーブレットの幅が変化するので、単純にフーリエ変換を用いてスペクトル分析するよりも周波数解像度が格段に良くなる。
演算部24では、ウェーブレット変換のようなマルチスケール分析を用いて時系列運動データに係る波形の分析を行っているため、変換を適用する時間長と分析対象の周波数が反比例の関係になり、低域の周波数ほど、高分解能で分析ができる。具体的には、演算部24では、時系列運動データが示す波形に対して適用する、マザーウェーブレット(上記の(1)式参照)について、分析対象となる周波数Faに応じたパラメータ(スケールa)を上記の(2)式に基づいて適用することにより、低域の周波数ほど、高分解能で分析ができるマルチスケール分析を実現している。これにより、運動分析システム1では、ウェイトマシンの運動のような低域周波数のペースの運動を含む多様なペースの運動について、波形の形状を意識した処理の必要がなく、同じ分析方法で精度の高い運動ペースなどの分析を行うことができる。そして、運動分析システム1では、多様なペースの運動について、前処理無しで、同じ分析方法で精度の高い分析を行うことができるので、分析に必要とする処理量やリソースを低減することもできる。
(B)第2の実施形態
以下、本発明による運動分析装置、プログラム及び方法、並びに、運動分析システムの第2の実施形態を、図面を参照しながら詳述する。
以下、本発明による運動分析装置、プログラム及び方法、並びに、運動分析システムの第2の実施形態を、図面を参照しながら詳述する。
(B−1)第2の実施形態の構成
第1の実施形態においては、運動データに基づいて、運動のペースを検出する方法について説明したが、第2の実施形態では、運動ユーザによる運動に伴う負荷に係る物理量の分析を行う方法について説明する。運動ユーザによる運動に伴う負荷に係る物理量とは、例えば、分析対象の運動カテゴリがウェイトマシンであれば、そのウェイトマシンの負荷量や、運動ユーザの消費カロリなどが該当する。
第1の実施形態においては、運動データに基づいて、運動のペースを検出する方法について説明したが、第2の実施形態では、運動ユーザによる運動に伴う負荷に係る物理量の分析を行う方法について説明する。運動ユーザによる運動に伴う負荷に係る物理量とは、例えば、分析対象の運動カテゴリがウェイトマシンであれば、そのウェイトマシンの負荷量や、運動ユーザの消費カロリなどが該当する。
図9は、この実施形態の運動分析システム1Aの全体構成を示すブロック図である。
運動分析システム1Aは、センシング装置10及び運動分析装置20Aを有しているが、センシング装置10については、第1の実施形態と同様のものであるので詳しい説明は省略する。
運動分析装置20Aは、運動量変換部26及び運動量対応記憶部27を有する点で第1の実施形態と異なるが、その他の構成については第1の実施形態と同様のものであるので詳しい説明は省略する。
図10は、運動量対応記憶部27に記憶される情報の例について示した説明図である。
運動量対応記憶部27には、図10に示すように、運動カテゴリの種類に対応する、説明変数(運動ペース、運動ペーススペクトル)及び目的変数(マシンの負荷、消費カロリ)の情報を登録している。なお、図10において、説明変数と目的変数は、最低限それぞれ一つの情報を登録しておけばよく、例えば、運動カテゴリが「ウェイトマシン」については、説明変数として運動ペースの項目を省略するようにしても良いし、目的変数として消費カロリの項目を省略するようにしても良い。また、図10において、運動カテゴリが徘徊、早歩きについては、説明変数としてスペクトル強度を省略するようにしても良い。なお、図10において、運動カテゴリが徘徊、早歩きについては、目的変数としてマシンの負荷という概念はないので空欄となっている。 図10に示す運動量対応記憶部27に記憶される情報としては、予め登録しておくようにしても良い。
例えば、図10において運動カテゴリが「ウェイトマシン」についてはペース「0.39Hz」、スペクトル強度の累積値「3.52db」、マシンの負荷「15.5」、消費カロリ「3.78cal/sec」となっている。これは、予め運動ユーザが、センシング装置10を付けた状態で、マシンの負荷「15.5」で「ウェイトマシン」を用いた運動を行ったときに、演算部24において算出された運動ペース及び運動ペーススペクトル(上述の図8参照)を保持しておき、その値を登録するようにしても良い。消費カロリについては、一般的にマシンの負荷「15.5」で「ウェイトマシン」を用いた運動を行った場合の消費カロリを登録しておいても良いし、運動ペースにおけるスペクトル強度の累積値を取得した際に既存の測定装置を運動ユーザに付けて測定した値を記憶するようにしても良く、消費カロリを求める方法は限定されないものである。
なお、図10においては、運動カテゴリが「ウェイトマシン」の情報が5つ登録されているが、最低限2つの情報があれば後述する運動量変換部26における分析は可能である一方、情報の数は多い方が分析精度の向上には望ましい。
次に、運動量変換部26において、運動に伴う負荷に係る物理量を分析処理する構成について説明する。
運動量変換部26において、分析対象となる運動カテゴリは、演算部24と同じものを適用するため、その設定方法に関する説明は省略する。以下の説明においては、例として、運動量変換部26には、分析対象となる運動カテゴリは「ウェイトマシン」であるものとして説明する。
図11は、運動ペーススペクトルとウェイトマシンの負荷量の関係を示した説明図である。
図11では、運動ペーススペクトルを説明変数とし、運動に伴う負荷に係る物理量としてウェイトマシンの負荷量を目的変数とした線形単回帰分析を行う様子を示している。
運動量変換部26において、分析する際に説明変数と目的変数の組み合わせについては、限定されないものであり、複数の組み合わせについて分析するようにしても良いが、ここでは図11に示す組み合わせを例として説明する。
図11では、運動量対応記憶部27内にあるデータを用いて、スペクトル強度とウェイトマシンの負荷量の関係を示している。そして、運動量変換部26では、図11に示す関係より、以下の(5)式に示すような回帰式が得られる。そして、運動量変換部26では、最新に取得した運動データを用いて、演算部24において推定された運動ユーザの運動ペースにおけるスペクトル強度の累積値(上述の図8参照)に、以下の(5)式を適用することにより、運動ユーザがウェイトマシンを用いた運動をした際の「マシン負荷」を推定することができる。運動量変換部26では、目的変数を消費カロリに変更して同様の演算を行えば、運動ユーザがウェイトマシンを用いた運動をした際の「消費カロリ」も推定することができる。
(ウェイトマシンの負荷量)=66.7×(スペクトル強度の累積値)−213.3…(5)
なお、運動量変換部26において、分析する際に説明変数と目的変数の組み合わせを決定する方法としては、あらかじめ運動カテゴリごとに組み合わせを設定しておくようにしても良いし、運動量対応記憶部27に情報を登録する際に、説明変数と目的変数を最初から一つずつだけ登録するようにしても良く、組み合わせの決定方法は限定されないものである。例えば、運動カテゴリがウェイトマシンについては、説明変数として運動ペーススペクトルだけを入力し、目的変数としてマシンの負荷だけを入力しておくようにしても良いし、予め組み合わせを設定しておくようにしても良い。
なお、運動量変換部26において、分析する際に説明変数と目的変数の組み合わせを決定する方法としては、あらかじめ運動カテゴリごとに組み合わせを設定しておくようにしても良いし、運動量対応記憶部27に情報を登録する際に、説明変数と目的変数を最初から一つずつだけ登録するようにしても良く、組み合わせの決定方法は限定されないものである。例えば、運動カテゴリがウェイトマシンについては、説明変数として運動ペーススペクトルだけを入力し、目的変数としてマシンの負荷だけを入力しておくようにしても良いし、予め組み合わせを設定しておくようにしても良い。
そして、運動分析装置20Aでは、出力部25は、運動量変換部26による推定結果を出力する。なお、出力部25は、運動量変換部26の推定結果と共に演算部24の推定結果を出力するようにしても良い。
(B−2)第2の実施形態の動作
次に、以上のような構成を有する第2の実施形態の運動分析システム1Aの動作(実施形態の運動分析方法)を説明する。
次に、以上のような構成を有する第2の実施形態の運動分析システム1Aの動作(実施形態の運動分析方法)を説明する。
図12は、運動分析装置20Aにおける運動データの分析に係る動作について示したフローチャートである。
なお、範囲情報記憶部23には、図2に示す内容が格納されているものとし、運動量対応記憶部27には、図10に示す内容が格納されているものとする。
また、ここでは、運動ユーザは、腕を動かす運動を行うウェイトマシンを行うものとし、さらにセンシング装置10は運動ユーザの二の腕に付けられているものとして説明する。また、演算部24及び運動量変換部26において、分析対象となる運動カテゴリは、ウェイトマシンであることが予め、運動分析装置20を操作するユーザなどにより設定されているものとして説明する。また、運動量変換部26には、分析の際に用いる説明変数は運動ペーススペクトルであり、目的変数はマシンの負荷と設定されているものとして説明する。ウェイトマシンを用いた運動では、マシンの負荷は、運動ペーススペクトルとの関連が強いためである。
なお、図12においてステップS201〜S205の処理は、上述の図3におけるステップS101〜S105と同様であるので説明を省略する。
そして、ステップS201〜S205の処理により、演算部24では、上述の図8に示す周波数ごとのスペクトル強度の累積値を示すグラフにおいて、fmin以上、fmax以下の範囲に絞ってスペクトル強度の累積値の極大値(運動ペーススペクトル)を探索するところまでは、上述の図3に示すステップS106と同様であるが、第2の実施形態では、運動量変換部26により、演算部24が探索した上述の運動ペーススペクトルが取得される(S206)。
なお、ステップS206において、運動量変換部26は、分析に用いる説明変数に対応するものだけを取得するようにしても良い。ここでは、上述の通り、運動量変換部26において、分析に用いるに説明変数は、運動ペーススペクトルだけであるので、S206では、運動量変換部26は、運動ペーススペクトルだけを取得しているが、運動ペースも目的変数として設定されている場合には、運動ペースの値も取得するようにしても良い。
そして、運動量変換部26は、上述のステップS206において運動ペーススペクトルを取得すると、取得した運動ペーススペクトルと、運動量対応記憶部27の情報とを用いて、運動ユーザがウェイトマシンを用いた運動をした際の「マシン負荷」を分析し、その結果を出力部25に与える(S207)。
そして、ステップS207における、運動量変換部26による分析結果が、出力部25により出力される(S107)。
(B−3)第2の実施形態の効果
第2の実施形態によれば、第1の実施形態の効果に加えて以下のような効果を奏することができる。
第2の実施形態によれば、第1の実施形態の効果に加えて以下のような効果を奏することができる。
運動分析システム1Aでは、歩行よりもペースが遅い運動において、ウェイトマシンの負荷量や消費カロリといった、対象とする運動の運動量を推定することができる。また、第1の実施形態のように、運動のペースと、運動に伴う負荷に係る物理量とを同時に検出することができ、健康状態管理やリハビリテーションにおいて人の状態をより詳細に把握することができるようになる。
(C)第3の実施形態
以下、本発明による運動分析装置、プログラム及び方法、並びに、運動分析システムの第3の実施形態を、図面を参照しながら詳述する。
以下、本発明による運動分析装置、プログラム及び方法、並びに、運動分析システムの第3の実施形態を、図面を参照しながら詳述する。
(C−1)第3の実施形態の構成
第1の実施形態においては、運動データに基づいて、運動のペースを検出する方法について説明したが、第3の実施形態では、運動中の異常動作の検出について説明する。ここで異常動作とは、ペースや運動量を検出する対象となる、一定の動作を繰り返す運動に対して、局所時間に行われる対象運動よりも速度が速い動作のことをいう。例えば、ウェイトマシンで負荷(重り)がかかったハンドルを持ち上げる運動などを行う際に、運動ユーザが、ハンドルにかかった負荷を支えきれずに、ハンドルを急に落としてしまったり、ハンドルを放してしまったりした場合などが、異常動作に該当する。
第1の実施形態においては、運動データに基づいて、運動のペースを検出する方法について説明したが、第3の実施形態では、運動中の異常動作の検出について説明する。ここで異常動作とは、ペースや運動量を検出する対象となる、一定の動作を繰り返す運動に対して、局所時間に行われる対象運動よりも速度が速い動作のことをいう。例えば、ウェイトマシンで負荷(重り)がかかったハンドルを持ち上げる運動などを行う際に、運動ユーザが、ハンドルにかかった負荷を支えきれずに、ハンドルを急に落としてしまったり、ハンドルを放してしまったりした場合などが、異常動作に該当する。
図13は、この実施形態の運動分析システム1Bの全体構成を示すブロック図である。
運動分析システム1Bは、センシング装置10及び運動分析装置20Bを有しているが、センシング装置10については、第1の実施形態と同様のものであるので詳しい説明は省略する。
運動分析装置20Bは、第1の実施形態の運動分析装置20について、演算部24が演算部24Bに置き換わり、さらに、異常動作検出部28が追加されただけで、その他の構成は同様であるので、以下の説明においては第1の実施形態との差異のみを説明する。
演算部24Bは、データ蓄積部22に蓄積された運動データに基づいて、上述の図5に示すグラフ(スカログラム)の内容を求めるところまでは、第1の実施形態の演算部24と同様である。
そして、第1の実施形態の演算部24では、上述の図5、図6に示すスカログラムに基づいて、有効領域の全ての区間(時間)について、周波数ごとのスペクトル強度の累積値を求めていたが、第3の実施形態の演算部24Bでは、有効領域を一定区間長(例えば、「2sec」等)の時間窓で分割し、その区間での周波数ごとのスペクトル強度の累積値を算出する点で異なっている。なお、運動分析装置20Bでは、第1の実施形態と同様に、スペクトル強度の累積値ではなく、有効領域の各周波数のそれぞれにおけるスペクトル強度の最大値を算出する方法を用いてもよい。
図14は、運動ユーザがセンシング装置10を付けて、ウェイトマシンを用いた運動を行った際に、異常動作が発生してしまった場合の運動データに基づいて作成したグラフ(スカログラム)である。図14では、時間軸上でいうと区間T1で異常動作が発生した様子について示している。
異常動作検出部28は、演算部24Bの算出結果及び範囲情報記憶部23に記憶された情報に基づいて、データ蓄積部22に蓄積された運動データにおいて異常動作が含まれるか否かを判定する。
以下、異常動作検出部28における異常動作の検出方法について説明する。
図15は、異常動作が発生した区間T1を含む時間窓について、周波数ごとのスペクトル強度の累積値を算出した場合のグラフである。
図16は、異常動作が発生した区間T1を含まない時間窓について、周波数ごとのスペクトル強度の累積値を算出した場合のグラフである。
図17は、上述の図15に示す異常動作が発生した区間T1を含む時間窓に係るグラフについて、異常動作の有無を検出する様子について示した説明図である。
上述の通り、演算部24Bでは、有効領域を一定区間長の時間窓で分割し、その区間での周波数ごとのスペクトル強度の累積値を算出するが、図15には、図16にはない比較的周波数が高い領域にピークが現れていることが確認できる。
異常動作検出部28では、上述の図15に示すような比較的周波数が高い領域にピークが現れているか否かに応じて、異常動作の有無を判定する。
以下、異常動作の有無について具体的な判定方法の例について説明する。例えば、範囲情報記憶部23を参照し、ペースや運動量を検出する対象となる運動のカテゴリ別ペースの最小値fminと最大値fmaxを取得し、fmin以上fmax以下の範囲(図17の領域A)の極大値を探索し、運動ペーススペクトルを取得する。次にfmaxより大きい範囲(図17の領域B)の極大値を探索し、そのスペクトル強度(以下、「異常動作スペクトル」と呼ぶ)を取得する。そして、2つのスペクトル強度を比較し、異常動作スペクトルが運動ペーススペクトルよりも大きければ異常動作ありと判定し、そうでなければ異常動作なしと判定するようにしても良い。なお、異常動作検出部28の異常動作検出において、異常動作判定の閾値を調整するために、いずれかのスペクトル強度に適当な係数をかけて比較するようにしても良い。
上述の通り、出力部25における出力方法は限定されないものであるが、運動分析システム1Bにおける分析及び分析結果の出力は、リアルタイム、非リアルタイムのいずれに対応可能するようにしてもよい。例えば、リアルタイムに分析及び分析結果の出力を行う場合には、異常動作ありの分析結果について、スポーツジムなどにおいて、係員(インストラクタ)へ通知(ランプ、ブザー、メールなど通知方法は限定されない)するようにしても良い。
(C−2)第3の実施形態の動作
次に、以上のような構成を有する第3の実施形態の運動分析システム1Bの動作(実施形態の運動分析方法)を説明する。
次に、以上のような構成を有する第3の実施形態の運動分析システム1Bの動作(実施形態の運動分析方法)を説明する。
図18は、運動分析装置20Bにおける運動データの分析に係る動作について示したフローチャートである。
なお、範囲情報記憶部23には、図2に示す内容が格納されているものとする。
また、ここでは、運動ユーザは、腕を動かす運動を行うウェイトマシンを行うものとし、さらにセンシング装置10は運動ユーザの二の腕に付けられているものとして説明する。また、演算部24及び異常動作検出部28において、分析対象となる運動カテゴリは、ウェイトマシンであることが予め、運動分析装置20を操作するユーザなどにより設定されているものとして説明する。
なお、図18においてステップS301〜S304の処理は、上述の図3におけるステップS101〜S104と同様であるので説明を省略する。
そして、第1の実施形態では上述のステップS105(累積強度算出)として、有効領域「全体」における周波数ごとのスペクトル強度の累積値を算出したが、第3の実施形態では上述の通り、有効領域を一定区間長の時間窓で分割し、その区間での周波数ごとのスペクトル強度の累積値を算出する(S305)。
演算部24Bの算出結果及び範囲情報記憶部23に記憶された情報に基づいて、データ蓄積部22に蓄積された運動データにおいて異常動作が含まれるか否かを判定する(S306)。具体的には、異常動作検出部28では、上述のステップS305において算出された結果を用いて、時間窓ごとに異常動作が含まれるか否かを上述の方法により判定する。上述のS305において、異常動作検出部28は、少なくとも一つの時間窓について異常動作が含まれると判定した場合に、最終判定結果を異常動作有りと判定しても良いし、所定の閾値以上の時間窓で異常動作が含まれると判定した場合にのみ異常動作有りと判定するようにしても良い。
そして、上述のステップS306において異常動作が有ると検出された場合、結果表示として判定結果が出力され、上述のステップS306において、異常動作が検出されなかった場合、センシング装置10からデータ蓄積部22へデータが蓄積されている限り、上述のステップS301へ戻って処理が継続される(S307〜S309)。
なお、上述のステップS307〜S309では、ステップS306における判定結果に応じて判定結果を出力するか否かを判断しているが、異常動作無しの場合でも一律にステップS306における判定結果を出力するようにしても良い。
(C−3)第3の実施形態の効果
第3の実施形態によれば、第1の実施形態の効果に加えて、以下のような効果を奏することができる。
第3の実施形態によれば、第1の実施形態の効果に加えて、以下のような効果を奏することができる。
運動分析システム1Bでは、一定の動作を繰り返す運動に対して、局所時間に行われる対象運動よりも速度が速い異常動作を検出することができる。なお、本実施例はリアルタイム、非リアルタイムの両方に対応可能であり、前者はスポーツジムなどにおいて、危険な動作を検出したらインストラクタが注意を促すことに応用でき、後者は運動分析の分野において、正しい動きとそうでない動きの違いを発見することに利用できる。
また、運動分析装置20Bにおいて分析結果を、スポーツジムなどにおいて、リアルタイムに係員(インストラクタ)へ通知することにより、異常動作を起こした運動ユーザへ係員(インストラクタ)が注意を促すなど、運動ユーザの安全を守ることができる。特に、ウェイトマシンなど、運動ユーザに高い負荷がかかる運動において、異常動作は、運動ユーザの安全を害することがあるため、異常動作を検出することは重要になる。また、運動分析装置20Bにおいて分析結果を、非リアルタイムに出力する場合には、運動分析の分野において、正しい動きとそうでない動きの違いを発見することに利用できる。
(D)他の実施形態
本発明は、上記の各実施形態に限定されるものではなく、以下に例示するような変形実施形態も挙げることができる。
本発明は、上記の各実施形態に限定されるものではなく、以下に例示するような変形実施形態も挙げることができる。
(D−1)上記の各実施形態では、演算部においてデータ変換に用いる関数についてウェーブレット変換を用いる例について説明したが、複数の周波数を用いて相関演算を行うことができればウェーブレット変換に限らず、フーリエ変換、アダマール変換、コサイン変換、ヒルベルト変換を用いてもよい。なお、ヒルベルト変換を用いた方法については、「最新ウェーブレット実践講座 入門と応用 信号処理の基礎から最新理論まで」(戸田浩、章忠、川畑洋昭著、2005年9月ソフトバンククリエイティブ出版)に詳述されている。
(D−2)第1の実施形態の説明ではウェーブレット変換に基づく説明のため、図2に示す範囲情報記憶部23では運動カテゴリにおける周波数の範囲のみ保持しておき、切り捨てる時間長を、上記の(4)式を用いて周波数から一意に算出していたが、ウェーブレット変換以外を用いる場合などにおいては、範囲情報記憶部に切り捨てる時間長を定めておき、有効領域を決定してもよい。
(D−3)上記の各実施形態では、範囲情報記憶部23に記憶されている運動の周波数の範囲を参照して取得したセンサデータのペースを抽出する方法について説明したが、逆にデータ蓄積部22に蓄積した時系列運動データの波形から、その運動が属する運動カテゴリを、範囲情報記憶部23に記憶されている運動の周波数と比較することにより推定するといった、行動認識の手法として利用するようにしても良い。
(D−4)第2の実施形態における運動量の推定に用いる手法としては、上記で説明した線形単回帰分析に限らず、非線形回帰分析に拡張したり、対象動作の種類やペースを説明変数と加えた重回帰分析を使ったりしてもよいし、多クラスサポートベクタマシン、ニューラルネットワーク、k最近隣法などといった判別分析を使い、結果を離散値にした推定も有効である。説明変数として対象動作の種類を使う場合は、加速度波形からその動作が何であるか推定するようにしても良い。
(D−5)第2の実施形態において、分析対象となる運動ユーザによる運動に伴う負荷に係る物理量は、上記で言及したウェイトマシンの負荷量や消費カロリの他に、ウオーキングマシンの傾度や呼気中の二酸化炭素濃度、乳酸値などを用いてもよいし、スペクトル強度と相関をもつ運動量という評価指標を新たに定義してもよい。
(D−6)第3の実施形態において、図17に示すように領域B内(fmaxより大きい範囲)に存在するスペクトル強度の累積値の極大値のみを異常動作有無の判定に用いているが、領域A内(fmin以上fmax以下の範囲)であっても、運動ペースよりも所定以上高い周波数帯のスペクトル強度の累積値の極大値も異常動作有無の判定に用いるようにしても良い。
例えば、領域A内(fmin以上fmax以下の範囲)であっても、運動ペースの1.5倍の周波数帯(例えば、運動ペースが1Hzであれば1.5Hz以上帯)に存在するスペクトル強度の累積値の極大値も異常動作有無の判定に用いるようにしても良い。
1…運動分析システム、10…センシング装置、11…センシング部、12…通信制御部、20…運動分析装置、21…通信制御部、22…データ蓄積部、23…範囲情報記憶部、24…演算部、25…出力部。
Claims (9)
- 所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置と、上記センサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析装置とを備える運動分析システムを構成する上記運動分析装置において、
上記センサ装置が測定した運動量の時系列データを保持する時系列データ保持手段と、
上記時系列データが示す波形に対して所定の関数を適用して、周波数ごとにスペクトル強度の分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析する波形分析手段と、
上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、上記物体における上記所定の運動に係る所定の物理量を分析する運動分析手段と
を有することを特徴とする運動分析装置。 - 上記物体における上記所定の運動について取りえる運動周波数の範囲を保持する運動周波数範囲保持手段をさらに有し、
上記波形分析手段は、上記運動周波数範囲保持手段が保持している運動周波数の範囲の情報も用いて、上記所定の物理量の分析を行う
ことを特徴とする請求項1又は2に記載の運動分析装置。 - 上記運動分析手段は、上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果のうち、上記運動周波数の範囲内のスペクトル強度分析結果を比較対象とし、その比較結果に基づいて、上記物体における上記所定の運動が行われた運動ペースを分析することを特徴とする請求項3に記載の運動分析装置。
- 上記運動分析手段は、上記運動ペースに該当する周波数のスペクトル強度分析結果を用いて、上記物体において、上記所定の運動に伴う負荷に係る物理量を分析することを特徴とする請求項4に記載の運動分析装置。
- 上記運動分析手段は、少なくとも、上記波形分析手段が分析した周波数ごとのスペクトル強度分析結果を用いて、上記物体の上記所定の運動において、所定よりも速度の速い異常動作が発生したか否かを判定することを特徴とする請求項2又は3に記載の運動分析装置。
- 上記波形分析手段が適用する、上記所定の関数は、ウェーブレット変換におけるマザーウェーブレットの関数であり、上記マザーウェーブレットの関数に、周波数に応じたスケールに係るパラメータを適用することを特徴とする請求項1〜5のいずれかに記載の運動分析装置。
- 所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置と、上記センサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析装置とを備える運動分析システムを構成する上記運動分析装置に搭載されたコンピュータを、
上記センサ装置が測定した運動量の時系列データを保持する時系列データ保持手段と、
上記時系列データが示す波形に対して所定の関数を適用して、周波数ごとにスペクトル強度の分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析する波形分析手段と、
上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、上記物体における上記所定の運動に係る所定の物理量を分析する運動分析手段と
して機能させることを特徴とする運動分析プログラム。 - 所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析方法において、
時系列データ保持手段、波形分析手段、運動分析手段を有し、
上記時系列データ保持手段は、上記センサ装置が測定した運動量の時系列データを保持する時系列データ保持手段と、
上記波形分析手段は、上記時系列データが示す波形に対して所定の関数を適用して、周波数ごとにスペクトル強度の分析をするものであって、周波数ごとに異なるパラメータを上記関数に適用して分析し、
上記運動分析手段は、上記波形分析手段が分析した、周波数ごとのスペクトル強度分析結果について、異なる周波数間で比較し、その比較結果に基づいて、上記物体における上記所定の運動に係る所定の物理量を分析する
ことを特徴とする運動分析方法。 - 所定の運動を繰り返し行う物体の運動に係る運動量を測定するセンサ装置と、上記センサ装置の測定結果に基づいて、上記物体における上記所定の運動に係る分析を行う運動分析装置とを備える運動分析システムにおいて、
上記運動分析装置として、請求項1〜6のいずれかに記載の運動分析装置を適用したこと
を特徴とする運動分析システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009115720A JP2010263953A (ja) | 2009-05-12 | 2009-05-12 | 運動分析装置、プログラム及び方法、並びに、運動分析システム |
| US12/662,635 US20100292618A1 (en) | 2009-05-12 | 2010-04-27 | Motion analysis device, program and method thereof and motion analysis system |
| EP10161185A EP2250964A1 (en) | 2009-05-12 | 2010-04-27 | Motion analysis device, program and method thereof and motion analysis system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009115720A JP2010263953A (ja) | 2009-05-12 | 2009-05-12 | 運動分析装置、プログラム及び方法、並びに、運動分析システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010263953A true JP2010263953A (ja) | 2010-11-25 |
Family
ID=42620467
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009115720A Pending JP2010263953A (ja) | 2009-05-12 | 2009-05-12 | 運動分析装置、プログラム及び方法、並びに、運動分析システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20100292618A1 (ja) |
| EP (1) | EP2250964A1 (ja) |
| JP (1) | JP2010263953A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012170740A (ja) * | 2011-02-23 | 2012-09-10 | Oki Electric Industry Co Ltd | 消費エネルギー測定装置、消費エネルギー測定方法および運動解析システム |
| CN104997523A (zh) * | 2014-04-18 | 2015-10-28 | 东北大学 | 一种上肢康复机器人康复训练运动功能评价方法 |
| CN105104291A (zh) * | 2015-07-27 | 2015-12-02 | 河南科技大学 | 一种奶牛运动状态判别方法及对应的智能喂食方法 |
| JP2016050404A (ja) * | 2014-08-29 | 2016-04-11 | 東日本旅客鉄道株式会社 | 鉄道橋の支承部の異常検出方法 |
| JP2017023449A (ja) * | 2015-07-23 | 2017-02-02 | 沖電気工業株式会社 | 活動量推定装置、活動量推定方法、プログラム、モデル生成装置、及びモデル生成方法 |
| JP2017513656A (ja) * | 2014-04-28 | 2017-06-01 | マサチューセッツ インスティテュート オブ テクノロジー | 無線反射によるバイタルサインの監視 |
| CN107993720A (zh) * | 2017-12-19 | 2018-05-04 | 中国科学院自动化研究所 | 基于深度相机和虚拟现实技术的康复功能评定装置及方法 |
| CN111344795A (zh) * | 2017-11-20 | 2020-06-26 | 美国西门子医学诊断股份有限公司 | 用于管理多重诊断引擎环境的用户接口 |
| US10989803B1 (en) | 2017-08-21 | 2021-04-27 | Massachusetts Institute Of Technology | Security protocol for motion tracking systems |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8849605B2 (en) | 2011-08-23 | 2014-09-30 | Qualcomm Incorporated | Method and apparatus for sensor based pedestrian motion detection in hand-held devices |
| US10197416B2 (en) * | 2015-01-21 | 2019-02-05 | Quicklogic Corporation | Multiple axis wrist worn pedometer |
| JP6710644B2 (ja) * | 2017-01-05 | 2020-06-17 | 株式会社東芝 | 動作解析装置、動作解析方法およびプログラム |
| CN109902189B (zh) * | 2018-11-30 | 2021-02-12 | 华为技术有限公司 | 一种图片选择方法及相关设备 |
| CN113688351A (zh) * | 2021-08-06 | 2021-11-23 | 北京每日优鲜电子商务有限公司 | 用于检测物品重量的方法、装置、电子设备和可读介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1156827A (ja) * | 1997-08-26 | 1999-03-02 | Seiko Epson Corp | 運動強度検出装置 |
| JP2006118909A (ja) * | 2004-10-20 | 2006-05-11 | Matsushita Electric Works Ltd | 歩行計 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69736622T2 (de) * | 1996-07-03 | 2007-09-13 | Hitachi, Ltd. | System zur Bewegungserkennung |
| FR2804596B1 (fr) * | 2000-02-04 | 2002-10-04 | Agronomique Inst Nat Rech | Procede d'analyse d'irregularites de locomotion humaine |
| JP2004121539A (ja) | 2002-10-02 | 2004-04-22 | Seiko Epson Corp | 体動検出装置 |
| JP4405200B2 (ja) | 2003-07-28 | 2010-01-27 | 旭化成エレクトロニクス株式会社 | 歩行時間演算装置及びそれを用いた歩行距離演算装置 |
| JP4504043B2 (ja) | 2004-02-19 | 2010-07-14 | セイコーインスツル株式会社 | 歩行速度算出装置及び歩行速度算出方法 |
| JP2005342254A (ja) | 2004-06-03 | 2005-12-15 | Matsushita Electric Ind Co Ltd | 歩行周期検出装置 |
| JP3984253B2 (ja) | 2004-10-01 | 2007-10-03 | マイクロストーン株式会社 | 健康管理用装置 |
| US7733224B2 (en) * | 2006-06-30 | 2010-06-08 | Bao Tran | Mesh network personal emergency response appliance |
| JP4894500B2 (ja) | 2006-12-22 | 2012-03-14 | ソニー株式会社 | 歩行波形処理方法及び歩行波形処理装置 |
| AU2008288697A1 (en) * | 2007-08-21 | 2009-02-26 | Commonwealth Scientific And Industrial Research Organisation | Body movement analysis method and apparatus |
-
2009
- 2009-05-12 JP JP2009115720A patent/JP2010263953A/ja active Pending
-
2010
- 2010-04-27 EP EP10161185A patent/EP2250964A1/en not_active Withdrawn
- 2010-04-27 US US12/662,635 patent/US20100292618A1/en not_active Abandoned
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1156827A (ja) * | 1997-08-26 | 1999-03-02 | Seiko Epson Corp | 運動強度検出装置 |
| JP2006118909A (ja) * | 2004-10-20 | 2006-05-11 | Matsushita Electric Works Ltd | 歩行計 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012170740A (ja) * | 2011-02-23 | 2012-09-10 | Oki Electric Industry Co Ltd | 消費エネルギー測定装置、消費エネルギー測定方法および運動解析システム |
| CN104997523A (zh) * | 2014-04-18 | 2015-10-28 | 东北大学 | 一种上肢康复机器人康复训练运动功能评价方法 |
| JP2017513656A (ja) * | 2014-04-28 | 2017-06-01 | マサチューセッツ インスティテュート オブ テクノロジー | 無線反射によるバイタルサインの監視 |
| JP2016050404A (ja) * | 2014-08-29 | 2016-04-11 | 東日本旅客鉄道株式会社 | 鉄道橋の支承部の異常検出方法 |
| JP2017023449A (ja) * | 2015-07-23 | 2017-02-02 | 沖電気工業株式会社 | 活動量推定装置、活動量推定方法、プログラム、モデル生成装置、及びモデル生成方法 |
| CN105104291A (zh) * | 2015-07-27 | 2015-12-02 | 河南科技大学 | 一种奶牛运动状态判别方法及对应的智能喂食方法 |
| US10989803B1 (en) | 2017-08-21 | 2021-04-27 | Massachusetts Institute Of Technology | Security protocol for motion tracking systems |
| CN111344795A (zh) * | 2017-11-20 | 2020-06-26 | 美国西门子医学诊断股份有限公司 | 用于管理多重诊断引擎环境的用户接口 |
| JP2021503672A (ja) * | 2017-11-20 | 2021-02-12 | シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレイテッド | 複数の診断エンジン環境を管理するためのユーザインターフェース |
| JP7153723B2 (ja) | 2017-11-20 | 2022-10-14 | シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレイテッド | 複数の診断エンジン環境を管理するためのユーザインターフェース |
| CN111344795B (zh) * | 2017-11-20 | 2024-01-12 | 美国西门子医学诊断股份有限公司 | 用于管理多重诊断引擎环境的用户接口 |
| CN107993720A (zh) * | 2017-12-19 | 2018-05-04 | 中国科学院自动化研究所 | 基于深度相机和虚拟现实技术的康复功能评定装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2250964A1 (en) | 2010-11-17 |
| US20100292618A1 (en) | 2010-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010263953A (ja) | 運動分析装置、プログラム及び方法、並びに、運動分析システム | |
| US10512423B2 (en) | Determining energy expenditure of a user | |
| CN105101869B (zh) | 用于识别坐姿与站姿之间的转变的方法和装置 | |
| JP2006296618A (ja) | 運動解析表示装置および運動解析方法 | |
| CN108981745A (zh) | 一种计步方法、装置、设备和存储介质 | |
| JP4952162B2 (ja) | データ処理装置,データ処理方法及びデータ処理プログラム | |
| JP2006198073A (ja) | 体動検出機および体動検出機を備える携帯端末装置 | |
| JP6943287B2 (ja) | 生体情報処理装置、生体情報処理システム、生体情報処理方法、およびプログラム | |
| KR101125672B1 (ko) | 운동패턴 분석방법 및 이를 이용한 운동량 산출장치 | |
| JP2021030067A (ja) | 人の歩調を検出する方法及びシステム | |
| JP2012213624A (ja) | 身体能力判定装置及び身体能力判定方法 | |
| JP5360093B2 (ja) | 消費エネルギー測定装置、消費エネルギー測定方法および運動解析システム | |
| KR101911218B1 (ko) | 운동량 계산 방법 및 장치 | |
| JP6259301B2 (ja) | 移動運動解析装置、方法及びシステム並びにプログラム | |
| JP2018007979A5 (ja) | ||
| JP6638860B2 (ja) | 情報処理システム、情報処理装置、および情報処理方法 | |
| JP6093833B1 (ja) | 心拍数推定装置、心理状態判定装置、心拍数推定方法、及びそのプログラム | |
| CN115554674A (zh) | 一种运动能耗预测方法及装置 | |
| JP6378492B2 (ja) | 移動運動解析装置及びプログラム | |
| JP2008188092A (ja) | データ処理方法,データ処理装置及びデータ処理プログラム | |
| JP6527024B2 (ja) | 移動運動解析装置及びシステム並びにプログラム | |
| JP2012108836A (ja) | 日常計測データからの対人特性推定装置、推定方法および推定プログラム | |
| WO2020004020A1 (ja) | 血流解析装置、血流解析プログラム、血流解析システム | |
| JP6527023B2 (ja) | 移動運動解析装置及びシステム並びにプログラム | |
| JP6486200B2 (ja) | 移動運動解析装置及びシステム並びにプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130827 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140107 |