WO2025141776A1 - 情報処理装置、プログラム及び情報処理方法 - Google Patents
情報処理装置、プログラム及び情報処理方法 Download PDFInfo
- Publication number
- WO2025141776A1 WO2025141776A1 PCT/JP2023/046966 JP2023046966W WO2025141776A1 WO 2025141776 A1 WO2025141776 A1 WO 2025141776A1 JP 2023046966 W JP2023046966 W JP 2023046966W WO 2025141776 A1 WO2025141776 A1 WO 2025141776A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- subject
- threshold
- dimensional
- target
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
Definitions
- This disclosure relates to an information processing device, a program, and an information processing method.
- a technique has been known for estimating the three-dimensional shape of a subject by using images captured by cameras installed at multiple locations on the subject and removing voxels that are not part of the subject from voxels arranged in three-dimensional space.
- the three-dimensional shape of the subject may not be estimated accurately.
- the information processing device described in Patent Document 1 is capable of estimating the three-dimensional shape of a subject based on images captured by multiple cameras by integrating a mask for removing voxels that are not part of the subject from voxels arranged in three-dimensional space, and a mask for removing voxels that are not part of structures that act as occluding elements.
- one or more aspects of the present disclosure aim to ensure that the three-dimensional shape of a subject can be reliably estimated when there is an obstructing element between the camera and the subject.
- the threshold information generation unit is characterized in that, when there is a shielding element that shields a target three-dimensional object that is one of the plurality of three-dimensional objects and at least one of the plurality of imaging devices, the threshold value of the target three-dimensional object is set to be smaller than when the shielding element is not present.
- the number of imaging devices that captured the used image is counted, and the number is compared with the threshold to determine whether or not to remove the one three-dimensional object from the space. This process is repeated until all of the multiple three-dimensional objects are selected as the one three-dimensional object, thereby identifying one or more three-dimensional objects to be removed from the space, and functioning as an estimation unit that estimates the shape of the subject using one or more three-dimensional objects remaining after removing the one or more three-dimensional objects from the space.
- the threshold information generation unit is characterized in that, when there is a shielding element that shields a target three-dimensional object that is one of the multiple three-dimensional objects and at least one of the multiple imaging devices, the threshold for the target three-dimensional object is set to a value smaller than when there is no shielding element.
- An information processing method generates threshold information indicating a threshold for determining whether or not to remove each of a plurality of three-dimensional objects virtually arranged to fill a predetermined space including the subject at a location where the subject is imaged, generates a plurality of distinguishing images that are images for distinguishing a first region that is the region of the subject from a second region that is a region other than the subject from a plurality of images obtained from a plurality of imaging devices that image the subject at different positions at the location, and generates images used to generate distinguishing images in which the position of a three-dimensional object selected from the plurality of three-dimensional objects projected onto each of the plurality of distinguishing images is included in the first region.
- the method counts the number of imaging devices that have captured an image of the subject, and compares the number with the threshold value to determine whether or not to remove the one three-dimensional object from the space. This is repeated until all of the multiple three-dimensional objects are selected as the one three-dimensional object, thereby identifying one or more three-dimensional objects to be removed from the space, and estimating the shape of the subject from one or more three-dimensional objects remaining after removing the one or more three-dimensional objects from the space.
- the threshold value for the target three-dimensional object is set smaller than when the blocking element is not present.
- FIG. 1 is a block diagram illustrating a schematic configuration of an information processing system according to first to third embodiments.
- 1 is a block diagram illustrating a schematic configuration of an information processing device according to a first embodiment.
- FIG. 11 is a schematic diagram for explaining a method for generating a threshold map.
- 13A and 13B are schematic diagrams showing an example in which it is determined whether or not to remove a voxel using a uniform threshold value.
- 13A and 13B are schematic diagrams showing an example in which a threshold is varied to determine whether or not to remove a voxel.
- FIG. 4 is a schematic diagram showing an overview of processing in a coordinate conversion unit.
- FIG. 2 is a block diagram illustrating a schematic configuration of a PC.
- FIG. 11 is a block diagram illustrating a schematic configuration of an information processing device according to a second embodiment. 13 is a flowchart showing the operation of the information processing device in the second embodiment.
- FIG. 2 is a schematic diagram for explaining a place where an image of a subject is captured.
- FIG. 11 is a block diagram illustrating a schematic configuration of an information processing device according to a third embodiment. 13 is a flowchart showing the operation of the information processing device in the third embodiment.
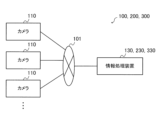
- FIG. 1 is a block diagram illustrating a schematic configuration of an information processing system 100 according to the first embodiment.
- the information processing system 100 includes a plurality of cameras 110 and an information processing device 130 .
- a plurality of cameras 110 and an information processing device 130 are connected to a network 101 .
- the camera 110 is an imaging device that captures an image including a subject whose three-dimensional shape is to be estimated.
- the cameras 110 capture images of the subject at different positions in a location where the subject is captured.
- An image captured by the camera 110 is sent to the information processing device 130 via the network 101 .
- FIG. 2 is a block diagram illustrating a schematic configuration of information processing device 130 according to the first embodiment.
- the information processing device 130 includes a receiving unit 131, a camera parameter acquisition unit 132, a camera parameter storage unit 133, a structural data storage unit 134, a threshold map generation unit 135, a silhouette extraction unit 136, a coordinate conversion unit 137, a subject model generation unit 138, and an output unit 139.
- the coordinate conversion unit 137 and the object model generation unit 138 constitute an estimation unit 140 .
- the receiving unit 131 receives various data from the network 101 .
- the receiving unit 131 receives image data from the camera 110.
- the received image data is provided to a camera parameter acquisition unit 132 during calibration, and to a silhouette extraction unit 136 at other times.
- the receiving unit 131 also receives structure data, which will be described later.
- the received structure data is stored in the structure data storage unit 134.
- the camera parameter acquisition unit 132 calculates camera parameters indicating the position and orientation of the camera 110 from the image data captured by the camera 110, and stores the calculated camera parameters in the camera parameter storage unit 133.
- the camera parameters are composed of external parameters and internal parameters.
- the external parameters consist of a rotation matrix and a translation matrix, and indicate the position and orientation of the camera 110.
- the internal parameters include information such as the focal length and optical center of the camera 110, and indicate the angle of view of the camera 110 and the size of the imaging sensor.
- the process of calculating the camera parameters is called calibration, and the camera parameters can be found by using the correspondence between points in a three-dimensional world coordinate system obtained using multiple image data captured by the camera 110 of a specific pattern such as a checkerboard, and the corresponding points on a two-dimensional system.
- the camera parameter storage unit 133 stores the camera parameters acquired by the camera parameter acquisition unit 132.
- the structure data storage unit 134 stores the structure data.
- the structure data is transmitted, for example, from another device (not shown) capable of using CAD (Computer-Aided Design) and is received by the receiving unit 131.
- the structure data is data that indicates the position and shape of static elements, which are elements such as stationary objects that are placed at the location where the subject is imaged.
- static elements include objects that move in the location where they are placed, such as robots, as long as their placement position does not change.
- the threshold map generating unit 135 sets the threshold of the target voxel to be smaller than when the occluding element is not present.
- the threshold map generating unit 135 may set the threshold of the target voxel to the number of cameras 110 that are not occluded by an occluding element between the target voxel and the target voxel, among the multiple cameras 110 that capture the subject.
- the threshold map generation unit 135 determines whether a static element, which is a stationary element that is placed at a location where an image of a subject is captured, is an occluding element by referring to structural data that indicates the position and shape of the static element.
- FIG. 3 is a schematic diagram for explaining a method for generating a threshold map. As shown in FIG. 3, a case in which a subject 150 is imaged by four cameras 110A to 110D will be described as an example.
- a shielding element 151 is disposed between the camera 110A and the subject 150. Therefore, when an image including subject 150 is captured by camera 110A, a portion of subject 150 is blocked by blocking element 151, and the entire subject 150 is not included in the image. However, there is no object that acts as an obstructing element between the images captured by cameras 110B to 110D and subject 150, and the images captured by cameras 110B to 110D include the entire subject 150.
- Figures 4 (A) and (B) are schematic diagrams showing an example of a case where a uniform threshold is used to determine whether or not to remove a voxel without performing processing in the threshold map generation unit 135.
- a large number of cubic voxels 152 shown in FIG. 4(A) are placed at the position where the subject 150 is located.
- the numbers in the voxels 152 shown in FIG. 4A indicate the number of cameras 110 that captured an image in which that voxel is included in the silhouette of the subject 150.
- a voxel 152 marked with the number “4” indicates that it is present within the silhouette of the subject 150 in the images captured by the four cameras 110 .
- the threshold for whether or not to remove a voxel is set to a uniform value of "4", then as shown in FIG. 4(B), the voxel that should be left as subject 150 is actually removed because it is occluded by occluding element 151.
- the threshold map generation unit 135 sets a smaller threshold for voxels 152 where an occluding element 151 exists between the camera 110 and the voxels 152 than for voxels 152 where an occluding element 151 does not exist.
- the threshold map generating unit 135 sets the threshold for each voxel 152 to the number of cameras 110 that have no occluding elements 151 between them, for example, as shown in the numbers in the voxels 152 in FIG. 5(A). As a result, as shown in FIG. 5(B), voxels 152 that have occluding elements 151 between them and the camera 110A are not removed, and the three-dimensional shape of the subject 150 can be accurately estimated.
- the threshold map generating unit 135 determines, for each voxel, a threshold value for determining whether or not to remove that voxel.
- the threshold map generating unit 135 sets a smaller threshold for voxels that have an occluding element between them and the camera 110 than for voxels that have no occluding element between them and the camera 110 .
- the threshold map generation unit 135 sets the threshold to the number of cameras whose angle of view includes the subject 150, and for a voxel that has an occluding element between it and the camera 110, the threshold value is the number of cameras whose angle of view includes the subject 150 minus the number of cameras 110 that have an occluding element between it and the voxel.
- the silhouette extraction unit 136 is a distinction image generation unit that generates a plurality of silhouette images, which are distinction images that are images for distinguishing a first region as a silhouette, which is the region of the subject, from a second region, which is the region other than the subject, from each of a plurality of images represented by a plurality of image data obtained from a plurality of cameras 110.
- the silhouette extraction unit 136 extracts, for each camera 110, a silhouette that is a subject area from the image data.
- the silhouette extraction unit 136 may hold background image data indicating a background image in advance, and extract a silhouette based on a difference from the background image.
- the silhouette extraction unit 136 may also divide an object region by segmentation, and extract a region corresponding to a subject from the divided object region as a silhouette.
- the silhouette image data indicating the extracted silhouette is provided to the coordinate conversion unit 137.
- the silhouette image data may be binary data with the same resolution as the image indicated by the image data from the camera 110, with the silhouette portion being "1" and the other portions being "0".
- the coordinate conversion unit 137 converts the position of the voxel into a position in the camera coordinate system based on the camera parameters stored in the camera parameter storage unit 133 .
- the coordinate transformation unit 137 projects the three-dimensional position of a voxel onto a two-dimensional image position.
- the object model generating unit 138 generates an object model that indicates the three-dimensional shape of the object.
- the object model generating unit 138 generates an object model indicating the three-dimensional shape of the object using, for example, a Space Caving Method.
- subject model generation unit 138 determines, for each voxel, whether or not the position of the voxel in the camera coordinate system is included in a silhouette generated based on image data from the corresponding camera 110. This allows subject model generation unit 138 to count the number of cameras 110 included in the silhouette for each voxel. Then, the subject model generation unit 138 can refer to the threshold map generated by the threshold map generation unit 135 to remove voxels that are less than the threshold value set for each voxel, and estimate the three-dimensional shape of the subject from the remaining voxels.
- the subject model generation unit 138 may generate data indicating the three-dimensional shape of the subject as the subject model, or may generate data that renders the three-dimensional shape of the subject.
- the output unit 139 outputs the subject model.
- data of the subject model may be transmitted to an external device, data of the subject model may be recorded on a portable recording medium, or an image rendered as the subject model may be displayed.
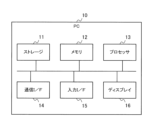
- the information processing device 130 described above can be realized by a computer such as the PC 10 shown in FIG.
- the PC 10 includes storage 11 such as a hard disk drive (HDD) and a solid state drive (SSD), memory 12, a processor 13 such as a central processing unit (CPU), a communication interface (I/F) 14 such as a network interface card (NIC), an input I/F 15 such as a keyboard and a mouse, and a display 16.
- the PC 10 may also include a connection I/F for connecting a portable memory such as a USB (Universal Serial Bus).
- a USB Universal Serial Bus
- the camera parameter storage unit 133 and the structure data storage unit 134 can be realized by the storage 11 or the memory 12 .
- the receiving unit 131 can be realized by the communication I/F 14 .
- the camera parameter acquisition unit 132, threshold map generation unit 135, silhouette extraction unit 136, coordinate conversion unit 137 and subject model generation unit 138 can be realized by the processor 13 reading a program stored in the storage 11 into the memory 12 and executing the program.
- the output unit 139 can be realized by the communication I/F 14, the display 16, or a connection I/F (not shown), depending on how the subject model is output.
- the above program may be downloaded to the storage 11 from a recording medium (not shown) via a reader/writer (not shown) or from the network 101 via the communication I/F 14, and then loaded onto the memory 12 and executed by the processor 13.
- the program may be directly loaded onto the memory 12 from a recording medium via a reader/writer or from the network 101 via the communication I/F 14, and executed by the processor 13.
- the program may be provided by a program product such as a recording medium.
- FIG. 8 is a flowchart showing the operation of information processing device 130 in the first embodiment. It is assumed here that the camera parameters have already been stored in the camera parameter storage unit 133, and the structure data has already been stored in the structure data storage unit 134.
- the silhouette extraction unit 136 receives image data from the receiving unit 131, extracts a silhouette, which is the area of the subject, from the image data for each camera 110, and generates silhouette image data that shows a silhouette image for distinguishing the extracted silhouette from other areas (S11).
- the generated silhouette image data is provided to the coordinate conversion unit 137.
- the coordinate conversion unit 137 sequentially selects one voxel as a target voxel from among the multiple voxels arranged in the space containing the subject, and repeatedly executes the processing of steps S12 to S17 until all voxels have been processed as target voxels (S12).
- step S16 the subject model generation unit 138 removes the target voxel from the space. Then, the process proceeds to step S17.
- the dynamic position acquisition unit 242 acquires dynamic position information indicating the position of a dynamic element that is moving in the location where the camera 110 captures an image of a subject.
- the dynamic position acquisition unit 242 acquires dynamic position information at an image capturing time, which is a time when the multiple cameras 110 capture an image of a subject.
- the image capturing time can be specified, for example, by metadata included in the image data.
- the dynamic position information is provided to a threshold map generator 235 .
- the dynamic location information may be acquired by any known method.
- the position of a dynamic element such as an AGV (Automatic Guided Vehicle) may be specified by reading an AR (Argumented Reality) marker attached to the dynamic element from image data captured by the camera 110.
- the dynamic element may specify its own position using a GPS (Global Positioning System) or the like, and transmit position information indicating the specified position to the information processing device 230.
- the dynamic position acquisition unit 242 may hold a schedule for the movement of the dynamic element, and the position of the dynamic element at the time of imaging may be specified based on the schedule.
- the threshold map generating unit 235 generates a threshold map as threshold information indicating thresholds for determining whether or not to remove voxels when the three-dimensional shape of the subject is estimated in the subject model generating unit 238 .
- the threshold map generating unit 235 may determine whether or not a dynamic element is an occluding element by referring to the dynamic model and the dynamic position information.
- the threshold map generation unit 235 generates a threshold map by assuming that, at the time the subject is imaged, a dynamic element of a shape stored in the dynamic model storage unit 241 is present at a position indicated by dynamic position information from the dynamic position acquisition unit 242.
- the method of generating the threshold map itself is the same as that in the first embodiment.
- the object model generating unit 238 generates an object model that indicates the three-dimensional shape of the object.
- the object model generating section 238 generates an object model indicating the three-dimensional shape of the object using, for example, the Space Caving Method.
- the method of generating the subject model itself is the same as in embodiment 1, but the subject model generating unit 238 generates the subject model using a threshold map that is generated according to the position where the dynamic element exists at the imaging time, which is the time when the image data corresponding to the silhouette image is captured.
- the information processing device 230 described above can also be realized by a computer such as the PC 10 shown in FIG. 7.
- the dynamic model storage unit 241 can also be realized by the storage 11 or the memory 12 .
- the dynamic location acquisition unit 242 can also be realized by the processor 13 reading a program stored in the storage 11 into the memory 12 and executing the program.
- FIG. 10 is a flowchart showing the operation of the information processing device 230 in the second embodiment. It is assumed here that the camera parameters have already been stored in the camera parameter storage unit 133, and the structure data has already been stored in the structure data storage unit 134.
- the dynamic position acquisition unit 242 acquires dynamic position information indicating the position where the dynamic element exists at the time when the subject is captured by the camera 110 (S20).
- the threshold map generating unit 235 refers to the structural data stored in the structural data storage unit 134 and the dynamic model stored in the dynamic model storage unit 241, and generates a threshold map indicating a threshold for determining whether or not to remove each voxel, assuming that the dynamic element is present at the position indicated by the dynamic position information (S21).
- the generated threshold map is provided to the subject model generating unit 238.
- the silhouette extraction unit 136 receives the image data from the receiving unit 131, and extracts a silhouette, which is the area of the subject, from the image data for each camera 110, to generate silhouette image data (S22).
- the image data here represents the image captured at the capture time.
- the generated silhouette image data is provided to the coordinate conversion unit 137.
- the coordinate transformation unit 137 sequentially selects one voxel as a target voxel from among the multiple voxels arranged in the space containing the subject, and repeatedly executes the processing of steps S23 to S28 until all voxels have been processed as target voxels (S23).
- an image captured by multiple cameras 110 includes a subject 350A for which shape estimation is performed and a subject 350B for which shape estimation is not performed.
- a user of information processing system 300 may select subject 350B for which shape estimation is not performed as the subject that he or she wishes to erase from the image.
- subject 350B for which shape estimation is not performed is also referred to as a non-target subject.
- FIG. 12 is a block diagram showing a schematic configuration of an information processing device 330 according to the third embodiment.
- the information processing device 330 includes a receiving unit 331, a camera parameter acquisition unit 132, a camera parameter storage unit 133, a structural data storage unit 134, a threshold map generation unit 335, a silhouette extraction unit 136, a coordinate conversion unit 137, a subject model generation unit 138, an output unit 339, an erased area model storage unit 343, a non-target position acquisition unit 344, and a model integration unit 345.
- coordinate conversion section 137 and object model generation section 138 form an estimation section 140 .
- the output unit 339 outputs the integrated model.
- data of the subject model and the replacement model may be transmitted to an external device, data of the subject model and the replacement model may be recorded on a portable recording medium, or images rendered as the subject model and the replacement model may be displayed.
- the silhouette extraction unit 136 receives the image data from the receiving unit 131, and extracts a silhouette, which is the area of the subject, from the image data for each camera 110, to generate silhouette image data (S32).
- the generated silhouette image data is provided to the coordinate conversion unit 137.
- the coordinate conversion unit 137 converts the position of the target voxel into the camera coordinate system of each camera 110 based on the camera parameters stored in the camera parameter storage unit 133 (S34). The coordinate conversion unit 137 then provides the subject model generation unit 138 with correspondence information indicating the correspondence between the three-dimensional position of the target voxel and the two-dimensional position of the target voxel, and the silhouette image data.
- the subject model generation unit 138 compares the number counted in step S35 with the threshold value of the target voxel shown in the threshold map corresponding to the imaging time to determine whether the number is less than the threshold value (S36). If the number is less than the threshold value (YES in S36), the process proceeds to step S37, and if the number is equal to or greater than the threshold value (NO in S36), the process proceeds to step S38.
- step S37 the subject model generation unit 138 removes the target voxel from the space. Then, the process proceeds to step S38.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024527614A JPWO2025141776A1 (https=) | 2023-12-27 | 2023-12-27 | |
| PCT/JP2023/046966 WO2025141776A1 (ja) | 2023-12-27 | 2023-12-27 | 情報処理装置、プログラム及び情報処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/046966 WO2025141776A1 (ja) | 2023-12-27 | 2023-12-27 | 情報処理装置、プログラム及び情報処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025141776A1 true WO2025141776A1 (ja) | 2025-07-03 |
Family
ID=96217368
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/046966 Pending WO2025141776A1 (ja) | 2023-12-27 | 2023-12-27 | 情報処理装置、プログラム及び情報処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025141776A1 (https=) |
| WO (1) | WO2025141776A1 (https=) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019116942A1 (ja) * | 2017-12-14 | 2019-06-20 | キヤノン株式会社 | 3次元モデルの生成装置、生成方法、及びプログラム |
| JP2022548009A (ja) * | 2019-09-12 | 2022-11-16 | コモンウェルス サイエンティフィック アンド インダストリアル リサーチ オーガナイゼーション | 物体移動システム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7465234B2 (ja) * | 2021-03-11 | 2024-04-10 | Kddi株式会社 | 3dモデル生成装置、方法及びプログラム |
-
2023
- 2023-12-27 WO PCT/JP2023/046966 patent/WO2025141776A1/ja active Pending
- 2023-12-27 JP JP2024527614A patent/JPWO2025141776A1/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019116942A1 (ja) * | 2017-12-14 | 2019-06-20 | キヤノン株式会社 | 3次元モデルの生成装置、生成方法、及びプログラム |
| JP2022548009A (ja) * | 2019-09-12 | 2022-11-16 | コモンウェルス サイエンティフィック アンド インダストリアル リサーチ オーガナイゼーション | 物体移動システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025141776A1 (https=) | 2025-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113449696B (zh) | 一种姿态估计方法、装置、计算机设备以及存储介质 | |
| JP4297197B2 (ja) | キャリブレーション処理装置、およびキャリブレーション処理方法、並びにコンピュータ・プログラム | |
| RU2735382C2 (ru) | Устройство обработки изображений, способ управления устройства обработки изображений и компьютерно-читаемый носитель хранения данных | |
| JP6948175B2 (ja) | 画像処理装置およびその制御方法 | |
| JP5912191B2 (ja) | 追跡システムを最適化するためのシステムおよび方法 | |
| JP2009515493A (ja) | カメラ動きの決定 | |
| KR20190034092A (ko) | 화상처리 장치, 화상처리 방법, 화상처리 시스템 및 기억매체 | |
| JP6425847B1 (ja) | 画像処理装置、画像処理方法およびプログラム | |
| US20180101979A1 (en) | Image processing apparatus and image processing method | |
| JP2009110304A (ja) | 画像処理装置、画像処理方法 | |
| JP2010519629A (ja) | 画像内の3次元物体のポーズを決定する方法及びデバイス並びに物体追跡のための少なくとも1つのキー画像を創出する方法及びデバイス | |
| US20180240264A1 (en) | Information processing apparatus and method of generating three-dimensional model | |
| JP6736422B2 (ja) | 画像処理装置、画像処理の方法およびプログラム | |
| JP4217305B2 (ja) | 画像処理装置 | |
| JP2021016547A (ja) | プログラム、記録媒体、物体検出装置、物体検出方法及び物体検出システム | |
| US20090245579A1 (en) | Probability distribution constructing method, probability distribution constructing apparatus, storage medium of probability distribution constructing program, subject detecting method, subject detecting apparatus, and storage medium of subject detecting program | |
| CN110544278A (zh) | 刚体运动捕捉方法及装置、agv位姿捕捉系统 | |
| US12333749B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN111344741A (zh) | 一种三维轨迹数据的数据缺失处理方法及装置 | |
| WO2025141776A1 (ja) | 情報処理装置、プログラム及び情報処理方法 | |
| JP2010187130A (ja) | カメラ校正装置、カメラ校正方法、カメラ校正プログラムおよびそのプログラムを記録した記録媒体。 | |
| JP7504614B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| CN115619944A (zh) | 一种三维场景加载方法、装置和设备 | |
| JP7089238B2 (ja) | 重心位置推定装置、重心位置推定方法、プログラム | |
| JP7777360B1 (ja) | プログラム、情報処理システム及び情報処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2024527614 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024527614 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23963125 Country of ref document: EP Kind code of ref document: A1 |