WO2024253004A1 - 画像選択装置、画像選択方法、及びプログラム - Google Patents
画像選択装置、画像選択方法、及びプログラム Download PDFInfo
- Publication number
- WO2024253004A1 WO2024253004A1 PCT/JP2024/019723 JP2024019723W WO2024253004A1 WO 2024253004 A1 WO2024253004 A1 WO 2024253004A1 JP 2024019723 W JP2024019723 W JP 2024019723W WO 2024253004 A1 WO2024253004 A1 WO 2024253004A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- processing result
- processing
- target image
- selection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
Definitions
- the present invention relates to an image selection device, an image selection method, and a program.
- Patent Document 1 describes how the label of training data is determined based on the results of classification using a model that is different from the model to which the training data is applied.
- one example of the objective of the present invention is to provide an image selection device, an image selection method, and a program that can reduce the effort required to prepare training data.
- the image selection device of the present disclosure includes an acquisition means for acquiring a first processing result that is a result of processing a target image using a first machine learning model, and acquiring a second processing result that is a processing result by a high-precision image processing means that can process the target image with higher accuracy than the first machine learning model; a determination means for determining whether or not to use the target image as training data for a first machine learning model using the first processing result and the second processing result; Equipped with.
- the image processing method includes at least one computer, Obtaining a first processing result which is a result of processing the target image using a first machine learning model, and obtaining a second processing result which is a processing result by a high-precision image processing means capable of processing the target image with higher accuracy than the first machine learning model;
- the image selection method uses the first processing result and the second processing result to determine whether or not to use the target image as training data for a first machine learning model.
- the program in the present disclosure includes: an acquisition means for acquiring a first processing result which is a result of processing a target image using a first machine learning model, and acquiring a second processing result which is a processing result by a high-precision image processing means capable of processing the target image with higher accuracy than the first machine learning model; a determination means for determining whether or not to use the target image as training data for a first machine learning model using the first processing result and the second processing result; Give them permission.
- the present disclosure provides an image selection device, an image selection method, and a program that can reduce the effort required to prepare training data.
- the image selection device 20 is a device that generates training data for generating a first machine learning model, and includes at least an acquisition unit 220 and a determination unit 230, as shown in FIG.
- the acquisition unit 220 acquires a first processing result and also acquires a second processing result.
- the first processing result is a result of processing the target image using a first machine learning model.
- the second processing result is a processing result by a high-precision image processing unit that can process the target image with higher accuracy than the first machine learning model.
- the first processing result and the second processing result indicate, for example, whether or not at least one of a specific event and an object is included in the target image.
- objects include, but are not limited to, at least one of a vehicle such as an automobile, a person, and a foreign object on the road.
- specific events include, but are not limited to, a traffic accident or a traffic jam.
- the first processing result and the second processing result may further include the positions of the specific event and the object in the target image.
- the cascade separator when used alone, the cascade separator also requires less computational effort than deep learning, but tends to have lower accuracy.
- the first machine learning model does not pre-process the target image, but the high-precision image processing unit performs pre-processing.
- An example of the pre-processing used by the high-precision image processing unit is as illustrated in (B).
- (D) When the high-precision image processing unit and the first machine learning model are machine learning models, the number of parameters used, for example the number of features, is greater in the high-precision image processing unit than in the first machine learning model.
- both the high-precision image processing unit and the first machine learning model may calculate the confidence that an event or object is included in the target image, and if this confidence is equal to or greater than a reference value, may determine that the event or object is included in the target image.
- the reference value used by the high-precision image processing unit and the reference value used by the first machine learning model may be different from each other or may be the same.
- at least one of the reference value used by the high-precision image processing unit and the reference value used by the first machine learning model may be set by a user or developer of the image selection device 20 via a user interface.
- the amount of calculations performed by the high-precision image processing unit is usually greater than the amount of calculations when the first machine learning model is used. Therefore, the processing time by the high-precision image processing unit is longer than the processing time when the first machine learning model is used.
- the judgment unit 230 uses the first processing result and the second processing result to judge whether or not to use the target image as training data for the first machine learning model. This makes it possible to reduce the effort required to prepare training data.
- the image selection device 20 is used together with the image processing device 10, at least one imaging device 30, a first storage unit 40, a second storage unit 50, and a learning device 60.
- the image selection device 20 is often used together with multiple imaging devices 30. Also, although only one image processing device 10 is shown in FIG. 4, multiple image processing devices 10 may be used for one image selection device 20.
- the imaging device 30 generates images at a predetermined frame rate.
- the imaging device 30 is a surveillance camera.
- the imaging range of the imaging device 30 may be a road, a building entrance, or indoors, for example, inside a room.
- the imaging device 30 captures an image of a road, multiple imaging devices 30 are placed along the road.
- the imaging device 30 transmits the generated image to the image processing device 10 by linking it to the identification information and generation date and time of the imaging device 30.
- the identification information of the imaging device 30 is used, for example, when identifying the location where the image was captured.
- the generation date and time of the image may be generated by the image processing device 10. In this case, for example, the image processing device 10 sets the date and time when the image was acquired from the imaging device 30 as the generation date and time of the image.
- the image processing device 10 has a first image processing unit 110.
- the first image processing unit 110 processes the target image generated by the imaging device 30 to determine whether or not a specific event or object is included in the target image.
- the first image processing unit 110 uses a first machine learning model.
- the machine learning used in the first machine learning model is, for example, but not limited to, a neural network such as deep learning, bagging, boosting, or stacking.
- the first image processing unit 110 links the processing result by the first machine learning model, i.e., the first processing result, to the target image on which the first processing result is based and its generation date and time, and identification information of the imaging device 30 that generated the target image, and stores the result in the first storage unit 40 together with the target image.
- the imaging device 30 may transmit the target image to the image processing device 10 in real time, and the first image processing unit 110 of the image processing device 10 may process the target image in real time.
- the first image processing unit 110 generates the first processing result each time a target image is generated, so it is necessary to process the target image quickly, i.e., in a short time. For this reason, it is difficult to increase the processing volume of the first image processing unit 110 in order to improve processing accuracy.
- the image selection device 20 reads out the target image and the first processing result from the first storage unit 40.
- the image selection device 20 has a high-precision image processing unit 210.
- the high-precision image processing unit 210 processes the target image to generate a second processing result. In this way, the second processing result is generated after the first processing result. Furthermore, the amount of processing required to generate the second processing result is greater than the amount of processing required to generate the first processing result.
- the image selection device 20 then uses the read-out first processing result and the generated second processing result to determine whether or not to use the target image as teacher data, and stores information capable of identifying the target image determined to be used as teacher data in the second storage unit 50. As an example, the image selection device 20 stores the target image in the second storage unit 50 as at least a part of the teacher data.
- the learning device 60 includes a learning unit 610.
- the learning unit 610 updates the first machine learning model by using the target image selected by the image selection device 20 as at least a part of the training data, and stores the updated first machine learning model in the image processing device 10.
- the image processing device 10 then processes the target image using the updated first machine learning model.
- the image selection device 20 may have the first image processing unit 110, may have the learning unit 610, or may have both the first image processing unit 110 and the learning unit 610.
- the image selection device 20 may also be integrated with at least one of the first storage unit 40 and the second storage unit 50.
- the image selection device 20 may also acquire the target image directly from the imaging device 30.
- the image selection device 20 includes an acquisition unit 220 and a determination unit 230, as well as a high-precision image processing unit 210 and a storage processing unit 240.
- the high-precision image processing unit 210 generates a second processing result by processing the target image.
- the high-precision image processing unit 210 generates the second processing result by processing the target image using, for example, a second machine learning model.
- the machine learning used in the second machine learning model is, for example, a neural network such as deep learning, bagging, boosting, or stacking, but is not limited to these.
- the high-precision image processing unit 210 may also generate the second processing result without using the second machine learning model.
- the high-precision image processing unit 210 may generate the second processing result by feature extraction or pattern matching.
- the acquisition unit 220 and the determination unit 230 are as described with reference to FIG. 1.
- the storage processing unit 240 stores in the second storage unit 50 information capable of identifying a target image that has been determined by the determination unit 230 to be used as training data for the first machine learning model. This makes it possible to generate training data by using the second storage unit 50.
- the information capable of identifying the target image may be the target image itself, or may be information indicating the imaging device 30 that generated the target image and the date and time of generation.
- the storage processing unit 240 may also generate teacher data and store it in the second storage unit 50.
- the storage processing unit 240 generates teacher data using a target image and the second processing result of the target image.
- An example of this teacher data includes a target image and at least a part of the second processing result of the target image. At least a part of the second processing result of the target image is used as at least a part of the label of the target image.
- An example of at least a part of the second processing result may be at least one of the position of the object and the position of the occurrence of the event in the target image, or at least one of the type of the object and the type of the event, or both of these positions and types.
- the label does not have to be a point, and may have a certain area.
- the label may include information input by a user or developer of the image selection device 20.
- the storage processing unit 240 acquires this information via a user interface of the image selection device 20.
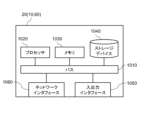
- the image selection device 20 has, as hardware, for example, a bus 1010, a processor 1020, a memory 1030, a storage device 1040, an input/output interface 1050, and a network interface 1060.
- the bus 1010 is a data transmission path for the processor 1020, memory 1030, storage device 1040, input/output interface 1050, and network interface 1060 to transmit and receive data to and from each other.
- the method of connecting the processor 1020 and other components to each other is not limited to a bus connection.
- the processor 1020 is a processor realized by a CPU (Central Processing Unit) or a GPU (Graphics Processing Unit), etc.
- Memory 1030 is a main storage device realized by RAM (Random Access Memory) or the like.
- the storage device 1040 is an auxiliary storage device realized by a removable medium such as a HDD (Hard Disk Drive), an SSD (Solid State Drive), a memory card, or a ROM (Read Only Memory), and has a recording medium.
- the recording medium of the storage device 1040 stores program modules that realize each function of the image selection device 20 (e.g., the high-precision image processing unit 210, the acquisition unit 220, the judgment unit 230, and the memory processing unit 240).
- the processor 1020 loads each of these program modules onto the memory 1030 and executes them, thereby realizing each function corresponding to the program module.
- the storage device 1040 may also function as at least one of the first memory unit 40 and the second memory unit 50.
- the network interface 1060 is an interface for connecting the image selection device 20 to a network.
- This network is, for example, a LAN (Local Area Network) or a WAN (Wide Area Network).
- the network interface 1060 may connect to the network wirelessly or by wired connection.
- the image selection device 20 may communicate with at least one of the image processing device 10, the imaging device 30, the first memory unit 40, the second memory unit 50, and the learning device 60 via the network interface 1060.
- the image selection device 20 may be realized by multiple devices each having the configuration shown in FIG. 6.
- the hardware configurations of the image processing device 10 and the learning device 60 are similar to the hardware configuration of the image selection device 20 shown in FIG. 6.
- the operation timing of the image selection device 20 is not synchronized with the operation timing of the image processing device 10.
- the image selection device 20 operates periodically to process unprocessed target images.
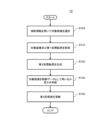
- the acquisition unit 220 of the image selection device 20 acquires an unprocessed target image and a first processing result linked to the target image from the first storage unit 40 (step S110).
- the high-precision image processing unit 210 generates a second processing result by processing the target image acquired by the acquisition unit 220 (step S120).
- the acquisition unit 220 acquires this second processing result.
- the judgment unit 230 judges whether or not to use the currently processed target image as teacher data using the first processing result and the second processing result acquired by the acquisition unit 220 (step S130).
- the determination unit 230 updates the second storage unit 50 using the target image determined to be used as training data in step S130 (step S140).
- a specific example of the process performed here is as described with reference to FIG. 5.
- the judgment unit 230 uses the first processing result and the second processing result to judge whether or not to use the target image as teacher data for the first machine learning model. This makes it possible to reduce the effort required to prepare the teacher data. Furthermore, when the storage processing unit 240 of the image selection device 20 stores the target image and at least a portion of the second processing result in the second storage unit 50 as at least a portion of the teacher data, the effort required to prepare the teacher data can be further reduced.
- the image selection device 20 shown in Fig. 8 has a selection unit 250 in addition to the image selection device 20 shown in Fig. 5.
- the selection unit 250 uses auxiliary information to select a target image from the images generated by the imaging device 30.
- the high-precision image processing unit 210, the acquisition unit 220, and the judgment unit 230 perform processing on the target image selected by the selection unit 250. In this way, it is possible to reduce the amount of processing by the high-precision image processing unit 210, the acquisition unit 220, and the judgment unit 230 while maintaining the quality of the teacher data generated using the image selection device 20.
- the first image processing unit 110 of the image processing device 10 processes all images generated by the imaging device 30.
- auxiliary information includes at least one of the location where the target image was taken, the timing of taking the image, and weather information at the time of taking the image.
- the auxiliary information includes information input via a user interface.
- the type of information input via the user interface may be, for example, at least one of the location where the target image was taken, the timing of taking the image, and weather information at the time of taking the image, as shown in (1) above.
- the auxiliary information includes information regarding the condition of the road.
- the "shooting location" among the auxiliary information shown in (1) above is, for example, a shooting location that satisfies a specific condition, that is, the shooting range of the imaging device 30.
- an example of the "shooting location" used as auxiliary information is a location where at least one of the following criteria is met: the number of accidents per unit period, the number of traffic jams per unit period, the presence of stopped vehicles, the number of vehicles detected going the wrong way, the number of vehicles detected traveling at a speed below a specified speed, the number of vehicles detected traveling at a speed above the legal speed, the number of vehicles detected trying to avoid the vehicle, and the traffic volume of moving bodies such as vehicles.
- At least one of the number of accidents per unit period, the number of traffic jams per unit period, and the traffic volume of moving bodies such as vehicles used here is generated, for example, by processing an image generated by the imaging device 30. This processing may be performed by the first image processing unit 110 of the image processing device 10 or the high-precision image processing unit 210 of the image selection device 20.
- An example of a specific moving body is at least one of a pedestrian, a bicycle, a motorcycle, and a specific vehicle such as a truck.
- the selection unit 250 selects an image that satisfies this "shooting location" as a target image.
- the shooting location is identified using the identification information of the image processing device 10 that generated the image. This identification information is stored in, for example, the first storage unit 40.
- the "photographing timing" of the auxiliary information shown in (1) above includes, for example, at least one of a specific month, a specific day of the week, a specific season, and a specific time period.
- An example of a specific day of the week is at least one of a weekday, a holiday, and a national holiday.
- An example of a specific time period is at least one of morning, evening, and night.
- the selection unit 250 selects an image that satisfies this "photographing timing" as the target image.
- the date and time of image generation is stored, for example, in the first storage unit 40.
- weather information at the time of shooting indicates that, for example, an image shot in a specific weather condition is selected as the target image.
- an example of the specific weather condition is at least one of rain, fog, snow, and strong wind.
- the selection unit 250 may obtain, as weather information for an image generated by the imaging device 30, weather information corresponding to, for example, the shooting date and time and the shooting location from a server that stores past weather.
- This server may obtain and store weather information corresponding to the shooting date and time and the shooting location from a sensor installed together with the imaging device 30.
- this server may be managed by an organization that manages the image processing device 10, the image selection device 20, and the learning device 60.
- This server may also be managed by a public institution such as the Japan Meteorological Agency.
- information generated by sensors that are less related to weather such as distance measuring sensors such as LiDAR or ultrasonic sensors, infrared sensors, or infrared cameras, may be used as auxiliary information.
- the user interface shown in (2) above also includes a field that shows auxiliary information in a selectable state to the user of the image selection device 20, for example, a field that allows the user to select auxiliary information in a pull-down format, as in the screen shown in FIG. 9.
- the screen shown in FIG. 9 allows the user to select the season, time period, and weather information in a pull-down format.
- the "information relating to road conditions" shown in (3) above includes, for example, at least one of the following: degree of road congestion, presence and type of traffic restrictions, presence or absence of foreign objects such as fallen objects, and type of road.
- the degree of road congestion at the time the image was generated may be determined, for example, using traffic congestion history information stored in an external server, or may be determined by processing the image generated by the imaging device 30.
- the type of road may include at least one of general roads, roads such as expressways where only certain vehicles are permitted to pass, and toll roads.
- the type of road may be linked in advance to, for example, the identification information of the imaging device 30.
- the image selection device 20 shown in FIG. 8 operates, for example, as shown in FIG. 10.
- the selection unit 250 acquires auxiliary information and uses this auxiliary information to select a target image from the images stored in the first storage unit 40 (step S102).
- the storage processing unit 240 may also display the auxiliary information used to select the target image on a display device viewed by a user of the image selection device 20, together with at least one of the image selected as the target image and the image not selected as the target image.
- the first machine learning model used by the image processing device 10 may have a reduced processing accuracy for images captured under specific conditions.
- the image selection device 20 can select images that satisfy these specific conditions as target images, thereby increasing the amount of training data that satisfies these conditions. Therefore, by using the image selection device 20, the weaknesses of the first machine learning model can be reduced.
- the judgment unit 230 further uses auxiliary information when judging whether or not to use the target image as training data.
- auxiliary information to be used include (1) to (3) described with reference to Figs. 8 and 9.
- the judgment unit 230 uses the auxiliary information to judge whether the target image can be used as teacher data, and performs judgment processing using the first processing result and the second processing result for the target image that is judged to be usable here.
- the judgment unit 230 uses the first processing result and the second processing result to judge whether the target image can be used as teacher data, and performs judgment processing using the auxiliary information for the target image that is judged to be usable here.
- the "judgment process using auxiliary information" is similar to the process in which the selection unit 250 shown in FIG. 8 selects a target image, and the conditions for selecting the target image here are the conditions for judging that the image can be used as training data.
- auxiliary information used in the image selection device 20 further includes the following (4).
- the auxiliary information is based at least in part on the second processing result.
- the auxiliary information is that the event or object to be detected has been detected in the second processing result.
- the judgment unit 230 uses the first processing result and the second processing result to judge whether or not the target image in which this event or object has been detected in the second processing result can be used as training data.
- the auxiliary information may be the result of comparing the first processing result with the second processing result. For example, if the target image includes multiple events or objects according to the second processing result, and the ratio of the number of events or objects indicated by the first processing result to the number of multiple events or objects indicated by the second processing result, i.e., the detection rate of the first image processing unit 110 when the second processing result is considered correct, is equal to or lower than a reference value, the judgment unit 230 judges that the target image can be used as training data. For example, if the target image contains three objects but the first image processing unit 110 can only detect one object, the detection rate will be 1/3.
- the auxiliary information shown in (4) above may be used as an auxiliary condition.
- (4-1) It is assumed that an image is generated by an imaging device 30 by photographing a road, and that a plurality of imaging devices 30 are arranged along this road as shown in Fig. 12.
- the auxiliary information includes whether or not the second processing result corresponding to an image generated at a predetermined timing by an imaging device 30b different from the imaging device 30a has detected a moving object.
- the predetermined timing used here is a timing determined based on the generation timing of the target image, and is set by, for example, an administrator of the image selection device 20.
- the distance L between the imaging devices 30a and 30b is known.
- the speed of a moving object between the imaging devices 30a and 30b falls within a certain range, from V1 to V2 . Therefore, the time from when the moving object appears in the image generated by the imaging device 30a to when it appears in the image generated by the imaging device 30b is likely to be greater than or equal to L/V2 and less than or equal to L/V1.
- the high-precision image processing unit 210 determines that the target image generated by the imaging device 30a does not include a moving object, but determines that the image generated by the imaging device 30b includes a moving object approximately L/V 2 or more and L/V 1 or less after the timing of the target image generation. In this case, the second processing result of the target image generated by the imaging device 30a may be incorrect. Therefore, the judgment unit 230 judges that this target image should be used as teacher data.
- the storage processing unit 240 stores the target image in the second storage unit 50, but at this stage, a label for the training data is not generated.
- This label is set, for example, by a person who views the target image stored in the second storage unit 50.
- the image of the imaging device 30b used in this processing will be an image generated approximately L/V 2 or more and L/V 1 or less before the timing when the target image was generated.
- This image selection device 20 also selects images that satisfy certain conditions as target images, and therefore increases the amount of training data that satisfies these conditions. Therefore, by using the image selection device 20, it is possible to reduce the weaknesses of the first machine learning model. Furthermore, by using the image selection device 20, it is possible to have the first machine learning model learn training data that satisfies certain conditions with priority.
- An image selection device comprising: 2. In the image selection device according to the above item 1, An image selection device comprising a selection means for selecting the target image using auxiliary information. 3.
- the target image is generated by photographing a road;
- the auxiliary information includes information regarding the condition of the road. 7.
- the auxiliary information is based at least in part on the second processing result. 8.
- the image selection device further comprises a learning means for updating the first machine learning model using the training data. 9.
- the target image is generated by photographing a road; A plurality of photographing means are arranged along the road, The first processing result and the second processing result include the presence or absence of a moving object, the auxiliary information includes, in a case where the second processing result corresponding to the photographing means that generated the target image does not detect the moving object, whether or not the second processing result corresponding to an image generated at a predetermined timing by the photographing means different from the photographing means that generated the target image detects a moving object; The predetermined timing is a timing determined based on a generation timing of the target image. 10.
- the auxiliary information includes information input via a user interface. 11.
- At least one computer is Obtain a first processing result which is a result of processing the target image using a first machine learning model, and obtain a second processing result which is a processing result by high-precision image processing which can process the target image with higher accuracy than the first machine learning model; An image selection method that uses the first processing result and the second processing result to determine whether or not to use the target image as training data for a first machine learning model. 16. In the image selection method according to claim 15, The method of claim 1, wherein the at least one computer selects the target image using auxiliary information. 17. In the image selection method according to claim 15, An image selection method in which the at least one computer further uses auxiliary information to determine whether or not to use the target image as the training data. 18.
- the auxiliary information includes at least one of the location where the target image was taken, the timing of taking the image, and weather information at the time of taking the image. 20.
- the target image is generated by photographing a road; The image selection method, wherein the auxiliary information includes information regarding the condition of the road. 21.
- the auxiliary information is based at least in part on the second processing result. 22.
- the at least one computer updates the first machine learning model using the training data.
- the target image is generated by photographing a road; A plurality of photographing means are arranged along the road, The first processing result and the second processing result include the presence or absence of a moving object, the auxiliary information includes, in a case where the second processing result corresponding to the photographing means that generated the target image does not detect the moving object, whether or not the second processing result corresponding to an image generated at a predetermined timing by the photographing means different from the photographing means that generated the target image detects a moving object; The predetermined timing is a timing determined based on a generation timing of the target image. 24.
- the at least one computer performs the high-precision image processing. 28. In the image selection method according to any one of claims 15 to 27, The at least one computer generates the first processing result. 29. At least one computer has: an acquisition means for acquiring a first processing result which is a result of processing a target image using a first machine learning model, and acquiring a second processing result which is a processing result by high-precision image processing which can process the target image with higher accuracy than the first machine learning model; a determination means for determining whether or not to use the target image as training data for a first machine learning model using the first processing result and the second processing result; A program that allows you to have 30.
- the determination means further determines whether or not to use the target image as the teacher data using auxiliary information.
- the auxiliary information includes at least one of the location where the target image was taken, the timing of taking the image, and weather information at the time of taking the image. 34.
- the target image is generated by photographing a road;
- the auxiliary information includes information regarding the condition of the road.
- the auxiliary information is based at least in part on the second processing result. 36.
- the target image is generated by photographing a road; A plurality of photographing means are arranged along the road, The first processing result and the second processing result include the presence or absence of a moving object, the auxiliary information includes, in a case where the second processing result corresponding to the photographing means that generated the target image does not detect the moving object, whether or not the second processing result corresponding to an image generated at a predetermined timing by the photographing means different from the photographing means that generated the target image detects a moving object; The predetermined timing is a timing determined based on a generation timing of the target image. 38.
- the auxiliary information includes information inputted via a user interface. 39.
- the first processing result and the second processing result include the presence or absence of an object and its position, A program, wherein at least a portion of the second processing result included in the teacher data includes the position of the object.
- a processing amount required to generate the second processing result is greater than a processing amount required to generate the first processing result; the first processing result is generated every time the target image is generated; The second processing result is generated after the first processing result.
- a recording medium storing the program according to any one of claims 29 to 42.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- Computing Systems (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- General Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- Health & Medical Sciences (AREA)
- Multimedia (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025526072A JPWO2024253004A1 (https=) | 2023-06-05 | 2024-05-29 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023-092663 | 2023-06-05 | ||
| JP2023092663 | 2023-06-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024253004A1 true WO2024253004A1 (ja) | 2024-12-12 |
Family
ID=93795985
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/019723 Ceased WO2024253004A1 (ja) | 2023-06-05 | 2024-05-29 | 画像選択装置、画像選択方法、及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2024253004A1 (https=) |
| WO (1) | WO2024253004A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021536072A (ja) * | 2018-09-14 | 2021-12-23 | テスラ,インコーポレイテッド | トレーニングデータを取得するためのシステム及び方法 |
| WO2022004370A1 (ja) * | 2020-07-03 | 2022-01-06 | コニカミノルタ株式会社 | データ収集装置及びデータ収集方法 |
| WO2023090036A1 (ja) * | 2021-11-22 | 2023-05-25 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、情報処理方法、プログラム |
-
2024
- 2024-05-29 JP JP2025526072A patent/JPWO2024253004A1/ja active Pending
- 2024-05-29 WO PCT/JP2024/019723 patent/WO2024253004A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021536072A (ja) * | 2018-09-14 | 2021-12-23 | テスラ,インコーポレイテッド | トレーニングデータを取得するためのシステム及び方法 |
| WO2022004370A1 (ja) * | 2020-07-03 | 2022-01-06 | コニカミノルタ株式会社 | データ収集装置及びデータ収集方法 |
| WO2023090036A1 (ja) * | 2021-11-22 | 2023-05-25 | ソニーセミコンダクタソリューションズ株式会社 | 情報処理装置、情報処理方法、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024253004A1 (https=) | 2024-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Breitenstein et al. | Systematization of corner cases for visual perception in automated driving | |
| US9129161B2 (en) | Computationally efficient scene classification | |
| JP5776545B2 (ja) | 路面調査プログラム及び路面調査装置 | |
| US10223910B2 (en) | Method and apparatus for collecting traffic information from big data of outside image of vehicle | |
| CN113468967A (zh) | 基于注意力机制的车道线检测方法、装置、设备及介质 | |
| JP7238821B2 (ja) | 地図生成システム及び地図生成プログラム | |
| Giyenko et al. | Application of convolutional neural networks for visibility estimation of CCTV images | |
| CN104350510A (zh) | 多线索对象检测和分析 | |
| CN111898491B (zh) | 一种车辆逆向行驶的识别方法、装置及电子设备 | |
| CN110852177A (zh) | 基于单目相机的障碍物检测方法及系统 | |
| WO2023017317A1 (en) | Environmentally aware prediction of human behaviors | |
| US20200372283A1 (en) | Estimating color of vehicles on a roadway | |
| CN117152513A (zh) | 一种面向夜间场景的车辆边界定位方法 | |
| CN111881833A (zh) | 一种车辆检测方法、装置、设备及存储介质 | |
| CN114092858A (zh) | 一种基于ai的社区消防通道占用检测识别方法 | |
| US12406477B2 (en) | Iterative refinement of annotated datasets | |
| CN115100903A (zh) | 一种基于yolov3目标检测算法的公路弯道双向预警系统 | |
| CN120932192A (zh) | 物流车车道偏移检测方法、装置、设备及存储介质 | |
| WO2024253004A1 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| JP7611578B2 (ja) | 路面判定装置、及び、路面判定方法 | |
| CN113962249B (zh) | 压线识别方法及装置、电子设备和存储介质 | |
| JP7539621B2 (ja) | 画像生成システム、画像生成方法および画像生成プログラム | |
| CN117831000A (zh) | 一种红绿灯检测方法及装置、电子设备及存储介质 | |
| CN117746135A (zh) | 目标检测方法及装置、电子设备和存储介质 | |
| CN117882117A (zh) | 图像处理方法、装置和系统、可移动平台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24819235 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025526072 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |