WO2022259638A1 - 制御方法および制御システム - Google Patents
制御方法および制御システム Download PDFInfo
- Publication number
- WO2022259638A1 WO2022259638A1 PCT/JP2022/007797 JP2022007797W WO2022259638A1 WO 2022259638 A1 WO2022259638 A1 WO 2022259638A1 JP 2022007797 W JP2022007797 W JP 2022007797W WO 2022259638 A1 WO2022259638 A1 WO 2022259638A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- control
- operators
- level
- control level
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/224—Output arrangements on the remote controller, e.g. displays, haptics or speakers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
- G05D1/2279—Handing over between remote control and on-board control; Handing over between remote control arrangements involving allocation of control between two or more remote operators, e.g. tele-assistance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/698—Control allocation
- G05D1/6987—Control allocation by centralised control off-board any of the vehicles
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0639—Performance analysis of employees; Performance analysis of enterprise or organisation operations
- G06Q10/06398—Performance of employee with respect to a job function
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/096741—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where the source of the transmitted information selects which information to transmit to each vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096783—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a roadside individual element
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/10—Outdoor regulated spaces
- G05D2107/13—Spaces reserved for vehicle traffic, e.g. roads, regulated airspace or regulated waters
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Definitions
- the present disclosure relates to a control method and a control system for controlling a notification device that notifies traffic information.
- Patent Document 1 discloses a traffic signal control system that controls traffic signals in order to monitor vehicle traffic at intersections and to ensure the safety of pedestrians crossing pedestrian crossings.
- the present disclosure provides a control method and control system that can appropriately control a notification device that notifies traffic information.
- a control method is a control method performed by a control device, and includes: based on the operational capabilities of each of a plurality of operators remotely monitoring or remotely controlling a mobile object, the plurality of operators determines first information indicative of a group control level required for a group constituted by to perform a remote operation, wherein the control level is determined by a notification device that notifies people in the vicinity of the mobile object , indicates the degree of assistance for remote operation of a moving object by the operator; attribute-based control required for each of the plurality of operators to perform remote operation based on the attribute information of each of the plurality of operators; Determining second information indicating a level, determining third information indicating an individual control level for each of the plurality of operators based on the first information and the second information; within a predetermined range from a predetermined notification device device control used to control the predetermined notification device based on the third information determined for the operators of the identified one or more mobile bodies Determine fourth information indicating a level; Then, based on the fourth information
- a control system includes: a plurality of operation terminals that receive operation inputs from a plurality of operators; a plurality of notification devices that notify traffic information about a moving object; and the plurality of notification devices according to the operation inputs.
- the server is required for remote control by a group composed of the plurality of operators based on the operational capabilities of each of the plurality of operators.
- a group level determining unit for determining first information indicating a group control level to be controlled by each of the plurality of operators, based on the attribute information of each of the plurality of operators.
- an attribute-based level determining unit that determines second information indicating a control level; and an individual level that determines third information indicating an individual control level for each of the plurality of operators based on the first information and the second information.
- a determination unit an information acquisition unit that acquires mobile information about one or more mobile units existing within a predetermined range from a predetermined notification device, and an operator of one or more mobile units specified from the mobile unit information.
- a device level determination unit for determining fourth information indicating a device control level used when controlling the predetermined notification device based on the third information determined for the predetermined notification device; and a control command output unit that determines notification content to be output from the notification device and outputs a control command for performing notification based on the notification content.
- FIG. 1 is a schematic diagram showing an example of a control system in an embodiment.
- FIG. 2 is a block configuration diagram of the control system in the embodiment.
- FIG. 3 is a schematic diagram of a notification device included in the control system according to the embodiment.
- FIG. 4 is a block diagram of the notification device.
- FIG. 5 is a diagram showing an example of the content of traffic information notified by the notification device.
- FIG. 6 is a block configuration diagram of an operation terminal included in the control system according to the embodiment.
- FIG. 7 is a block configuration diagram of a server included in the control system according to the embodiment.
- FIG. 8 is a diagram showing operator information acquired by the control system.
- FIG. 9 is a diagram showing an example of the correspondence relationship between the ratio of normal operators and the first information indicating the group control level.
- FIG. 9 is a diagram showing an example of the correspondence relationship between the ratio of normal operators and the first information indicating the group control level.
- FIG. 10 is a diagram showing an example of a correspondence relationship between operator attribute information and attribute-based control levels.
- FIG. 11 is a diagram showing individual control levels determined by the control system.
- FIG. 12 is a diagram showing mobile information acquired by the control system.
- FIG. 13 is a diagram showing notification device information acquired by the control system.
- FIG. 14 is a diagram showing a correspondence relationship among mobile objects, operators, and notification devices generated by the control system.
- FIG. 15 is a diagram showing device control levels for notification devices determined by the control system.
- FIG. 16 is a flow chart showing the control method in the embodiment.
- FIG. 17 is a diagram showing the flow during the step of determining the first information.
- FIG. 18 is a diagram showing the flow in the step of determining the second information indicating the attribute-based control level.
- FIG. 17 is a diagram showing the flow during the step of determining the first information.
- FIG. 18 is a diagram showing the flow in the step of determining the second information indicating the attribute-based control level
- FIG. 19 is a diagram showing the flow in the step of determining the third information indicating the individual control level.
- FIG. 20 is a diagram showing the flow in the step of generating correspondences between mobile units, operators, and notification devices.
- FIG. 21 is a flow diagram among the steps of determining a device control level for a notification device.
- FIG. 22 is a diagram illustrating another example of a notification device included in the control system according to the embodiment;
- Traffic infrastructure includes, for example, a notification device that is installed on the side of a road and that notifies traffic information about vehicles.
- control method of the present embodiment can appropriately control the notification device that notifies traffic information by having the configuration shown below.
- a control method is a control method performed by a control device and includes: first information indicating a group control level required for a group formed by the plurality of operators to perform remote operation, based on the operational capabilities of each of the plurality of operators who remotely monitor or remotely operate the mobile object; Determined, where the control level indicates the degree to which the notification device that notifies people around the moving object assists the operator in remote-controlling the moving object; determining second information indicating an attribute-based control level required for each of the plurality of operators to perform remote control based on the attribute information of each of the plurality of operators; determining third information indicating an individual control level for each of the plurality of operators based on the second information; Identifying one or more mobile objects existing within a predetermined range from a predetermined notification device; Determining fourth information indicating a device control level to be used in controlling the predetermined notification device based on the third information determined for the identified one or more mobile operator; Based on the fourth information, the notification content to be output from the pre
- the individual control level is determined based on the group control level and the attribute-based control level
- the device control level is determined based on the individual control level and the information of the notification device. can be properly controlled.
- the third information may be determined to be the higher control level of the first information and the second information.
- the fourth information is the third information determined for the plurality of operators remotely controlling the plurality of moving bodies. Of these, the one with the highest control level may be determined.
- the operation ability of each of the plurality of operators may be an ability determined based on the skill level of the operator who remotely operates the mobile body.
- the group control level determined based on the operator's operational ability it is possible to appropriately determine the individual control level determined based on the group control level and the attribute-based control level, and the device control level can be determined appropriately. Accordingly, it is possible to appropriately control the notification device that notifies traffic information.
- the group control level may be determined based on the proportion of ordinary operators who are not senior operators among all operators in the group.
- the group control level determined based on the ratio of ordinary operators it is possible to appropriately determine the group control level determined based on the ratio of ordinary operators. Therefore, the individual control level can be appropriately determined based on the group control level and the attribute-based control level, and the device control level can be determined appropriately. Accordingly, it is possible to appropriately control the notification device that notifies traffic information.
- the attribute information may include information on at least one of the operator's qualifications, work performance, amount of work being performed, and details of work being performed.
- the individual control level can be appropriately determined based on the group control level and the attribute-based control level, and the device control level can be determined appropriately. Accordingly, it is possible to appropriately control the notification device that notifies traffic information.
- the notification device may be installed in an area where the moving object moves.
- the moving body may be an automatically driving vehicle.
- a control system includes: a plurality of operation terminals that receive operation inputs from a plurality of operators; a plurality of notification devices that notify traffic information about a moving object; and the plurality of notification devices according to the operation inputs.
- a control system comprising a server for controlling the The server determines first information indicating a group control level required for a group composed of the plurality of operators to remotely operate the group, based on the operational capabilities of each of the plurality of operators.
- a determination unit for determining, based on the attribute information of each of the plurality of operators, attribute-based level determination for determining second information indicating an attribute-based control level required for each of the plurality of operators to perform remote control; an individual level determination unit that determines third information indicating an individual control level for each of the plurality of operators based on the first information and the second information; and an individual level determination unit that exists within a predetermined range from a predetermined notification device and an information acquiring unit for acquiring mobile body information about one or more of the mobile bodies, and based on the third information determined for operators of the one or more mobile bodies specified from the mobile body information, the predetermined a device level determination unit that determines fourth information indicating a device control level used when controlling the notification device; and based on the fourth information, determines notification content to be output from the predetermined notification device, and a control command output unit for outputting a control command for notification by content.
- the individual control level is determined based on the group control level and the attribute-based control level
- the device control level for the notification device is determined based on the individual control level and the notification device information. Accordingly, it is possible to appropriately control the notification device that notifies traffic information.
- these general or specific aspects may be realized by a system, method, integrated circuit, computer program, or a recording medium such as a computer-readable CD-ROM. Or it may be realized by any combination of recording media.
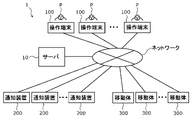
- FIG. 1 is a schematic diagram showing an example of the control system 1 according to the embodiment.
- FIG. 2 is a block configuration diagram of the control system 1 according to the embodiment.
- the control system 1 includes a plurality of operation terminals 100, a server 10, and a plurality of notification devices 200.
- the control system 1 may include a plurality of moving bodies 300 that move on roads.
- the operation terminal 100 is communicatively connected to the server 10 via a network such as the Internet.
- Notification device 200 and mobile object 300 are communicatively connected to server 10 via a network. That is, the server 10 is communicatively connected to the operation terminal 100, the notification device 200, and the mobile object 300 via the network.
- the mobile object 300 is a vehicle monitored by the control system 1, for example, an autonomous vehicle.
- the mobile object 300 is equipped with a GPS (Global Positioning System) and can transmit its own location information to the server 10 .
- GPS Global Positioning System
- the operation terminal 100 is a terminal device that receives operation input for remotely operating the notification device 200 and the moving object 300 .
- the operation terminal 100 accepts operation inputs by a plurality of operators P and outputs them to the server 10 .
- the server 10 is a control device that remotely operates a plurality of moving bodies 300 according to operation inputs received by a plurality of operation terminals 100 .
- the server 10 performs various kinds of arithmetic processing according to the operation input, and outputs a control command based on the arithmetic processing to the moving object 300 .
- the server 10 also outputs a control command for controlling the notification device 200 to the notification device 200 .
- the notification device 200 is a device that notifies people around the notification device 200 of traffic information about the mobile object 300 .
- the traffic information regarding the mobile object 300 is, for example, information necessary to ensure the safety of people near the mobile object 300 and smooth movement of the mobile object 300 .
- People around the notification device 200 are, for example, people within a distance of 10 m from the notification device 200, and include people walking on the road, people waiting at traffic lights, people riding bicycles, and the like.
- the notification device 200 notifies traffic information based on the control command output from the server 10 .
- control system 1 uses the notification device 200 to inform the person near the moving object 300 of the moving object in order to ensure the safety of the person near the moving object 300 and the smooth movement of the moving object 300 . 300 traffic information.
- Each configuration of the operation terminal 100, the server 10, and the notification device 200 included in the control system 1 will be described below.
- FIG. 3 is a schematic diagram of the notification device 200 included in the control system 1.
- FIG. 4 is a block configuration diagram of the notification device 200 included in the control system 1.
- FIG. 3 is a schematic diagram of the notification device 200 included in the control system 1.
- FIG. 4 is a block configuration diagram of the notification device 200 included in the control system 1.
- the notification device 200 is installed in an area where the moving object 300 moves, such as an intersection or roadside (see FIG. 1).
- the notification devices 200 are arranged at a predetermined interval (for example, an interval of 10 m or more and 50 m or less) at a corner of an intersection or along the road.
- the notification device 200 may be installed adjacent to a guide display board located above the road.
- the notification device 200 includes a communication section 201, a display section 203, a sound output section 204 and a control section 205.
- Communication unit 201 , display unit 203 , and sound output unit 204 are each connected to control unit 205 .
- the communication unit 201 is a communication module that communicates with the server 10 via a network.
- the display unit 203 is, for example, a visual display, and displays traffic information about the moving object 300 using characters, symbols, graphics, and the like.
- the display unit 203 is placed, for example, at a height of 1 m or more and 2 m or less from the ground.
- the sound output unit 204 is, for example, a speaker, and notifies the traffic information regarding the moving object 300 by voice.
- Control unit 205 controls operations of communication unit 201 , display unit 203 and sound output unit 204 .
- the control unit 205 is composed of a microprocessor, a memory, a program stored in the memory, and the like.
- the control unit 205 may have a GPS function.
- a control level is set for each of the plurality of notification devices 200.
- a control level is information set to determine the content or method of notification from the notification device 200 .
- this control level is a level that varies depending on the operating ability of each operator P who operates each mobile body 300, the amount of work being performed, etc., and is set to three levels, for example, "low, middle, and high.”
- the content of traffic information notified by each notification device 200 differs according to the control level set for each notification device 200 .
- FIG. 5 is a diagram showing an example of the content of traffic information notified by the notification device 200.
- FIG. 5 is a diagram showing an example of the content of traffic information notified by the notification device 200.
- the notification device 200 does not need to notify the surrounding people or other mobile objects to be careful in order to ensure safety. lower. In other words, the need for the control system 1 to assist the remote control of the moving body 300 by the operator P using the notification device 200 is reduced. In this case, the control system 1 sets the device control level for the notification device 200 to "low", and the notification device 200 does not call attention to surrounding people or other moving objects more than necessary. Decide what to notify and how to notify. When the automatic driving vehicle is approaching and calls attention to the people around, for example, as shown in FIG. Please” is displayed statically.
- the control system 1 sets the device control level to "medium” and sets the content and method of notification from the notification device 200 so as to call appropriate attention to surrounding people and other moving objects. to decide.
- control system 1 dynamically displays the characters "Please stop" on the display unit 203, as shown in (b) of FIG. 5, for example.
- the display unit 203 is caused to display a pictogram indicating that the automatic driving vehicle is approaching.
- the need for notification from the notification device 200 to call attention to surrounding people or other moving objects in order to ensure safety is Higher than the case of degree.
- the need for the control system 1 to assist the remote control of the moving object 300 by the operator P with the notification device 200 is higher than in the case where the above-described operation ability is intermediate.
- the control system 1 sets the device control level to "high”, and sets the content and method of notification from the notification device 200 so as to sufficiently alert surrounding people and other moving objects. to decide.
- FIG. 6 is a block diagram of the operation terminal 100 included in the control system 1. As shown in FIG.
- the operation terminal 100 is, for example, a device such as a PC (personal computer), and includes a communication section 101, an input section 102, a display section 103 and a control section 105.
- Communication unit 101 , input unit 102 and display unit 103 are each connected to control unit 105 .
- the communication unit 101 is a communication module that communicates with the server 10 via a network.
- the input unit 102 is a user interface that receives an operation input from the operator P.
- the display unit 103 is, for example, a display. In order to monitor or remotely control the mobile object 300, the display unit 103 displays a map of the area in which the mobile object 300 moves, the position of the mobile object 300 on the map, a travel plan of the mobile object 300, and the like.
- the control unit 105 controls operations of the communication unit 101 , the input unit 102 and the display unit 103 .
- the control unit 105 is configured by a microprocessor, a memory, a program stored in the memory, and the like.
- Operator information ip about the operator P is input to the operation terminal 100 by the input unit 102 .
- the operator information ip includes, for example, the operator P's name, ID (identification), the operator's P operating ability, and the operator's P attribute information.
- the input operator information ip is output to the server 10 .
- the server 10 is installed in a place different from the place where the notification device 200 is installed, for example, inside a building such as a building.
- the server 10 may be installed at the same location as the operation terminal 100 .
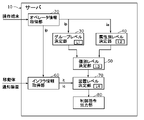
- FIG. 7 is a block configuration diagram of the server 10 included in the control system 1. As shown in FIG.
- the server 10 includes a group level determination unit 30, an attribute level determination unit 40, an individual level determination unit 50, a device level determination unit 70, and a control command output unit 80. there is The server 10 also includes an operator information acquisition unit 20 and an infrastructure information acquisition unit 60 .
- the server 10 is composed of a communication module, microprocessor, memory, and programs stored in the memory. Information about the notification device 200 and the mobile object 300 is stored in the memory. The functional configuration of each level determination section and each information acquisition section described above is realized by executing a program stored in a memory.
- the operator information acquisition unit 20 shown in FIG. 7 acquires operator information ip related to the operator P who performs remote operation from the operation terminal 100 .
- FIG. 8 is a diagram showing operator information ip acquired by the control system 1.
- FIG. 8 is a diagram showing operator information ip acquired by the control system 1.
- the operator information ip includes the name and ID of the operator P, the operating ability of the operator P, the attribute information ia of the operator P, and the state of the operator P.
- the operating ability of the operator P is determined based on the skill level of the operator P who remotely operates the mobile object 300 . For example, if the operator P has four years or more of experience, he/she is regarded as a senior operator P1, and if the operator has less than four years of experience, he/she is regarded as a normal operator P2.
- the attribute information ia of the operator P is, for example, information about the operator P's qualifications, work performance, amount of work being performed, and content of work being performed.
- the operator information acquisition unit 20 acquires whether the operator P is in an active state or in an inactive state.
- the active state is a state in which the operator P can monitor or remotely control the moving object 300 using the operation terminal 100
- the inactive state is a state other than the active state.
- the information about the operator P acquired by the operator information acquisition unit 20 is used by the group level determination unit 30, the attribute level determination unit 40, the individual level determination unit 50, the infrastructure information acquisition unit 60, and the device level determination unit 70, which will be described later. be done.
- a group level determination unit 30 shown in FIG. 7 indicates a group control level L1 required for a group composed of a plurality of operators P to perform remote control based on the respective operational capabilities of the plurality of operators P. Determine the first information.
- the group control level L1 corresponds to a control level that serves as a reference for the entire group (the degree to which the notification device 200 assists the remote control of the moving body 300 by the operator P). level is set.
- the group level determination unit 30 determines the group control level L1 by calculating the ratio of normal operators P2 who are not advanced among all the operators P forming the group.
- the group here is a group made up of all operators P who are active with respect to the control system 1 .
- the ratio of ordinary operators P2 is calculated by taking the number of all active operators P as the denominator and the number of ordinary operators P2 as the numerator.
- FIG. 9 is a diagram showing an example of the correspondence relationship between the ratio of normal operators P2 and the group control level L1.
- the group control level L1 shown in FIG. 9 is divided into three levels of "low, middle, and high".
- the group level determination unit 30 assumes that the remote operation will be properly performed by the senior operator P1, who has a high ratio.
- Group control level L1 is determined to be "low". For example, if the ratio of normal operators P2 is 40% or more and less than 60%, the group level determination unit 30 assumes that remote operations will be performed by advanced operators P1 and normal operators P2 without any problems.
- group control level L1 is set to "middle”. For example, if the ratio of ordinary operators P2 is 60% or more, the group level determining unit 30 sets the predetermined group control level L1 to "high" because it is assumed that the remote operation may not be performed appropriately. to decide.
- the group control level L1 determined by the group level determination unit 30 is used when determining the individual control level L3, which will be described later.
- the attribute-based level determination unit 40 shown in FIG. 7 indicates the attribute-based control level L2 required for each of the plurality of operators P to perform remote control based on the attribute information ia of each of the plurality of operators P. Determine the second information. Different levels can be set for the attribute-based control level L2 according to the operating ability of each operator. In the present embodiment, the attribute-based control level L2 is associated in advance for each attribute, and the attribute-based level determination unit 40 determines the attribute-based control level for each operator P based on the attribute-based control level L2 associated in advance. Determine the control level L2.
- FIG. 10 is a diagram showing an example of the correspondence relationship between the attribute information ia of the operator P and the attribute-based control level L2.
- the attribute-based control level L2 shown in FIG. 10 is divided into three levels of "low, middle, and high".
- the attribute-based level determining unit 40 determines that the operator P's attribute-based control level is determined because it is assumed that the operator P will appropriately perform the remote operation. Determine L2 to be "low". For example, if the operator P has a remote operation operator qualification of the second grade, the attribute-based level determination unit 40 assumes that the operator P will be able to perform the remote operation without any problems. Level L2 is determined as "middle”. For example, the attribute-based level determination unit 40 assumes that if the operator P has a remote operation operator qualification of grade 3, the remote operation by the operator P may not be performed appropriately. is determined to be "high".
- the attribute-based level determination unit 40 may determine the attribute-based control level L2 based on the amount of work that the operator P is currently performing. For example, if the operator P has a large amount of work to be performed, it becomes difficult for the operator P to turn his/her attention to work other than the work being performed. In this case, the attribute-based level determination unit 40 sets the attribute-based control level L2 of the operator P who has a large amount of work in progress to "high" in order to ensure the safety of people located near the moving body 300 monitored by the operator P. ” may be determined.
- the attribute-based level determining unit 40 may determine the attribute-based control level L2 based on the work content that the operator P is currently performing. For example, if the ratio of operators who are dealing with complaints is high, mutual follow-up among a plurality of operators P becomes difficult. In that case, the attribute-based level determining unit 40 determines the attribute-based control level L2 of the operator P who is responding to the complaint to be "high" in order to ensure the safety of the person located near the moving body 300 monitored by the operator P. You may
- the attribute-based control level L2 determined by the attribute-based level determining unit 40 is used when determining the individual control level L3, which will be described later.
- the individual level determination unit 50 shown in FIG. 7 determines the third information indicating the individual control level L3 for each of the plurality of operators P based on the group control level L1 and the attribute-based control level L2. In the present embodiment, the individual level determining unit 50 sets the higher control level of the group control level L1 (first information) and the attribute-based control level L2 (second information) to the individual control level L3 (third information). information).
- the higher one that is, the level of assistance from the notification device 200 is higher
- the individual control level L3 degree of assistance from the notification device 200
- FIG. 11 is a diagram showing the individual control level L3 determined by the control system 1.
- FIG. The individual control level L3 shown in FIG. 11 is also divided into three stages of "low, middle, and high".
- the individual level determining unit 50 determines the individual control level L3 to be “middle”. For example, when the group control level L1 is "middle” and the attribute-based control level L2 is "high”, the individual level determination unit 50 determines the individual control level L3 to be "high”. For example, when the group control level L1 is "middle” and the attribute-based control level L2 is "middle”, the individual level determining unit 50 determines the individual control level L3 to be "middle”. In this manner, the individual level determination unit 50 selects and determines the control level with the higher control level in order to ensure the safety of road traffic.
- the infrastructure information acquisition unit 60 shown in FIG. 7 acquires information on the notification devices 200 located within a predetermined distance from the moving body 300 monitored or remotely controlled by a plurality of operators P.
- FIG. 12 is a diagram showing mobile body information it acquired by the control system 1.
- FIG. 13 is a diagram showing notification device information ic acquired by the control system 1. As shown in FIG.
- the infrastructure information acquisition unit 60 acquires mobile body information it regarding the position of the mobile body 300 based on the signal transmitted from the mobile body 300 .
- the mobile object information it includes the vehicle ID, the name of the operator P who monitors the vehicle, and the vehicle position information (x, y).
- the positional information of the vehicle may be represented by the distance to the reference coordinates, or may be represented by the latitude and longitude.
- the infrastructure information acquisition unit 60 acquires the notification device information ic regarding the notification device 200 based on the information stored in the memory or the signal transmitted from the notification device 200 .
- the notification device information ic includes the ID of the notification device 200 and the location information (x, y) of the notification device 200 .
- the position information of the notification device 200 may be represented by a distance from the reference coordinates, or may be represented by latitude and longitude.
- the infrastructure information acquisition unit 60 generates a correspondence relationship between the mobile object 300, the operator P, and the notification device 200 based on the mobile object information it and the notification device information ic.
- FIG. 14 is a diagram showing the correspondence relationship between the mobile object 300, the operator P, and the notification device 200 generated by the control system 1.
- the ID information of the notification device 200 located within a predetermined distance from the mobile object 300 monitored or remotely controlled by the operator P is listed.
- the predetermined distance is, for example, in the range of 0 m or more and 50 m or less.
- ID information c1, c4, c7, and c10 of notification devices located near vehicle t1 monitored by Name A are shown.
- the server 10 can grasp the ID information of the notification device 200 located near the mobile object 300 and the operator P who controls the notification device 200. Also, the server 10 can identify one or more moving bodies 300 existing within a predetermined range from a predetermined notification device 200 . The server 10 sets the device control level L4 for each notification device 200 based on this FIG.
- the device level determination unit 70 shown in FIG. 7 determines the fourth information indicating the device control level L4 regarding the notification device 200 based on the individual control level L3 and the information of the notification device 200 .
- the device control level L4 is a control level used when controlling the notification device 200, and is determined based on the individual control level L3 of the operator P who remotely operates a moving object existing within a predetermined range from a certain notification device.
- the device level determining unit 70 refers to the information shown in FIG. The highest control level among the individual control levels L3 (third information) is determined as the device control level L4 (fourth information).
- the control level of the notification device 200 is determined by the operators P who remotely operate the plurality of mobile objects. Of these, the control level is determined according to the operator P who needs the most assistance from the notification device 200 .
- FIG. 15 is a diagram showing the device control level L4 determined by the control system 1.
- FIG. The device control level L4 shown in FIG. 15 is also divided into three levels of "low, middle, and high".
- FIG. 15 shows the case where there are two operators who control the notification device 200 .
- the device level determination unit 70 determines the device control level L4 to be “high”. For example, when the individual control level L3 of name A is "middle” and the individual control level L3 of name B is “high”, the device level determination unit 70 determines the device control level L4 to be “high”. For example, when the individual control level L3 of name A is "middle” and the individual control level L3 of name B is "middle", the device level determination unit 70 determines the device control level L4 to be "middle".
- each device control level L4 is also determined to change from moment to moment.
- the control command output unit 80 shown in FIG. 7 determines the notification content to be notified to the notification device 200 according to the device control level L4. Then, the control command output unit 80 outputs a control command for performing notification from the notification device 200 based on the determined notification content. Notification contents to be notified to the notification device 200 are as illustrated in FIG.
- the group control level L1 is determined based on the operating abilities of the plurality of operators P, and the attribute-based control level L2 is determined based on the attribute information ia of the plurality of operators P. is determined, and an individual control level L3 is determined based on the group control level L1 and the attribute-based control level L2. Then, the control system 1 determines the device control level L4 based on the information of the individual control level L3 and the notification device 200 . By determining the device control level L4 in this way, it is possible to appropriately control the notification device 200 that notifies traffic information.
- FIG. 16 is a flow chart showing the control method in the embodiment.
- the control method in the embodiment comprises step S10 of determining first information indicating group control level L1, step S20 of determining second information indicating attribute-based control level L2, and individual control.
- Step S30 for determining third information indicating level L3;
- Step S40 for generating correspondence between mobile object 300, operator P, and notification device 200; and determining fourth information indicating device control level L4 regarding notification device 200.
- the control method also includes step S60 of outputting a control command to the notification device 200. FIG. Each step will be described below.
- FIG. 17 is a diagram showing the flow in step S10 for determining the first information indicating the group control level L1.
- the server 10 acquires operator information ip from the operation terminal 100 (step S11).
- the server 10 calculates the ratio of ordinary operators P2 who are not advanced among all the operators P forming the group (step S12).
- the ratio of normal operators P2 is calculated by taking the number of all active operators P as the denominator and the number of normal operators P2 as the numerator.
- the server 10 determines the first information indicating the group control level L1 (step S13). For example, the server 10 determines the group control level L1 based on the ratio of normal operators P2 calculated in step S12 and the correspondence shown in FIG. Note that FIG. 9 is merely an example.
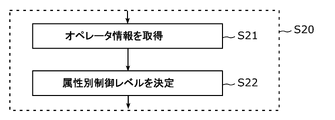
- FIG. 18 is a diagram showing the flow in step S20 for determining the attribute-based control level L2.
- the server 10 acquires operator information ip from the operation terminal 100 (step S21). It should be noted that in step S11, this step S21 may be omitted if the necessary operator information ip is acquired in step S20.
- the server 10 determines the attribute-specific control level L2 based on the operator information ip and the correspondence shown in FIG. 10 (step S22). Note that FIG. 10 is merely an example.
- step S20 may be executed before step S10.
- FIG. 19 is a diagram showing the flow in step S30 for determining the individual control level L3.
- the server 10 compares the group control level L1 and the attribute-based control level L2. Specifically, it is determined whether or not the attribute-based control level L2 is higher than the group control level L1 (step S31).
- the server 10 determines the group control level L1 as the individual control level L3 (step S32).
- the server 10 determines that the attribute-based control level L2 is higher (Yes in S31)
- the attribute-based control level L2 is determined as the individual control level L3 (step S33).
- the server 10 determines the individual control level L3 for each operator P by executing these steps S31 to S33 for each operator P.
- FIG. 20 is a diagram showing the flow in step S40 for generating the correspondence between the mobile object 300, the operator P, and the notification device 200.
- FIG. 20 is a diagram showing the flow in step S40 for generating the correspondence between the mobile object 300, the operator P, and the notification device 200.
- the server 10 acquires mobile information it (step S41) and acquires notification device information ic (step S42). Note that step S42 may be executed before step S41.
- the server 10 generates the correspondence between the mobile body 300, the operator P, and the notification device 200 as shown in FIG. 14 based on the mobile body information it and the notification device information ic (step 43). Also, the server 10 identifies one or more moving objects 300 existing within a predetermined range from a predetermined notification device 200 .
- FIG. 21 is a diagram showing the flow in step S50 for determining the device control level L4 regarding the notification device 200.
- FIG. 21 is a diagram showing the flow in step S50 for determining the device control level L4 regarding the notification device 200.
- the server 10 determines whether a plurality of operators P are involved in a predetermined notification device 200 (step S51).
- the server 10 determines that only one operator P is involved (No in S51), the individual control level L3 of the operator P is determined as the device control level L4 for the predetermined notification device 200 (step S52). .
- the server 10 determines the highest control level among the individual control levels L3 of the plurality of operators P as the device control level L4 (step S53).
- the server 10 executes these steps S51 to S53 for each notification device 200. Thereby, each device control level L4 is determined.
- the server 10 determines the notification content to be notified to the notification device 200 according to the device control level L4 determined in step S50, and outputs a control command to the notification device 200 based on the determined notification content (step S60).
- a control method is executed by these steps S10 to S60.
- control method includes step S10 for determining group control level L1, step S20 for determining attribute-based control level L2, step S30 for determining individual control level L3, moving body 300, operator P, and notification device. 200, step S50 of determining the device control level L4, and step S60 of outputting a control command to the notification device 200.
- the notification device 200 that notifies traffic information can be appropriately controlled.
- FIG. 22 is a diagram showing another example of the notification device 200 included in the control system 1.
- FIG. 22 is a diagram showing another example of the notification device 200 included in the control system 1.
- the notification device 200 is arranged on the roof of the vehicle, which is the mobile body 300 .
- the notification device 200 of the modification also includes a communication section 201 , a display section 203 , a sound output section 204 and a control section 205 .
- the display unit 203 is not limited to be horizontally long and may be vertically long.
- the device control level L4 is also set for this notification device 200 as in the embodiment.
- the notification device 200 on the moving body 300 may use the display unit 203 and the sound output unit 204 to notify traffic information.
- the moving body 300 changes its orientation so that the person to whom the traffic information is to be notified can easily recognize the display of the notification device 200.
- the moving object 300 may move near the person to whom the traffic information is to be notified and notify the traffic information.
- control level is divided into three stages of "low, middle, and high"
- control level is not limited to this, and the control level may be divided into four or more stages.
- Each control level may be expressed numerically.
- the group control level L1, the attribute-based control level L2, the individual control level L3, and the device control level L4 are divided into the same three stages.
- the number of stages can be different.
- safety confirmation around the notification device 200 may be performed when changing the device control level L4.
- the control system 1 may change the device control level L4 after confirming the safety of the surroundings using this camera.
- the notification device 200 notifies traffic information, but the notification device 200 does not always need to notify traffic information.
- the control system 1 acquires the movement plan of the mobile object 300, and if the mobile object 300 does not exist near the notification device 200 at all, sets the device control level L4 to "low" and provides traffic information more than necessary. You don't have to notify me.
- control system 1 sets the highest control level among the individual control levels L3 of the plurality of operators P to the device control in the narrow area. It may be determined as level L4.
- control system 1 changes the person in charge of the job to another operator P, and reassigns the moving bodies 300 monitored by each operator P. you can go
- the notification device 200 is remotely operated by the control system 1 in order to ensure human safety, but the present invention is not limited to this.
- the control system 1 may use the notification device 200 to guide and guide the autonomous vehicle in order to avoid traffic jams or bypass construction sites.
- control system 1 may remotely control the mobile body 300 itself.
- control system 1 may remotely control the travel route of the vehicle in order to avoid traffic jams or bypass construction sites.
- the present disclosure is useful as a control method for remotely operating transportation infrastructure related to automated driving services.
- control system 10 server 20 operator information acquisition unit 30 group level determination unit 40 attribute level determination unit 50 individual level determination unit 60 infrastructure information acquisition unit 70 device level determination unit 80 control command output unit 100 operation terminal 101 communication unit 102 input unit 103 display unit 105 control unit 200 notification device 201 communication unit 203 display unit 204 sound output unit 205 control unit 300 mobile unit ia attribute information ic notification unit information ip operator information it mobile unit information L1 group control level L2 attribute-based control level L3 individual Control level L4 Device control level P, P1, P2 Operator
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Human Resources & Organizations (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Economics (AREA)
- Educational Administration (AREA)
- Development Economics (AREA)
- Automation & Control Theory (AREA)
- Marketing (AREA)
- Theoretical Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Game Theory and Decision Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Business, Economics & Management (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Atmospheric Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Traffic Control Systems (AREA)
- Telephonic Communication Services (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22819828.9A EP4354412A4 (en) | 2021-06-07 | 2022-02-25 | CONTROL METHODS AND CONTROL SYSTEM |
| JP2023527498A JP7734344B2 (ja) | 2021-06-07 | 2022-02-25 | 制御方法および制御システム |
| CN202280038765.7A CN117413304A (zh) | 2021-06-07 | 2022-02-25 | 控制方法及控制系统 |
| US18/520,938 US12585283B2 (en) | 2021-06-07 | 2023-11-28 | Control method and control system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021095372 | 2021-06-07 | ||
| JP2021-095372 | 2021-06-07 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/520,938 Continuation US12585283B2 (en) | 2021-06-07 | 2023-11-28 | Control method and control system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022259638A1 true WO2022259638A1 (ja) | 2022-12-15 |
Family
ID=84425119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/007797 Ceased WO2022259638A1 (ja) | 2021-06-07 | 2022-02-25 | 制御方法および制御システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12585283B2 (https=) |
| EP (1) | EP4354412A4 (https=) |
| JP (1) | JP7734344B2 (https=) |
| CN (1) | CN117413304A (https=) |
| WO (1) | WO2022259638A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12466071B2 (en) * | 2021-05-05 | 2025-11-11 | Sanctuary Cognitive Systems Corporation | Robots, tele-operation systems, and methods of operating the same |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007079631A (ja) | 2005-09-09 | 2007-03-29 | Teruya:Kk | 交差点内における自動車の交通監視及び歩行弱者のための信号機制御システム |
| JP2016005932A (ja) * | 2014-06-20 | 2016-01-14 | 住友電気工業株式会社 | 車両の制御装置、及び車両 |
| JP2019016118A (ja) * | 2017-07-05 | 2019-01-31 | ヤフー株式会社 | 監視プログラム、監視方法、及び監視装置 |
| JP2020024708A (ja) * | 2018-05-31 | 2020-02-13 | みこらった株式会社 | 携帯端末、自動車及び通信システム |
| JP2021033523A (ja) * | 2019-08-21 | 2021-03-01 | トヨタ自動車株式会社 | 車両用操作システム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010009299A (ja) | 2008-06-26 | 2010-01-14 | Toyota Motor Corp | 交通制御システム |
| US20140207503A1 (en) * | 2013-01-18 | 2014-07-24 | International Business Machines Corporation | Skill mapping analysis |
| CA3070300A1 (en) * | 2017-07-28 | 2019-01-31 | Nuro, Inc. | Food and beverage delivery system on autonomous and semi-autonomous vehicle |
| US20190287394A1 (en) * | 2018-03-19 | 2019-09-19 | Derq Inc. | Early warning and collision avoidance |
| JP7187242B2 (ja) * | 2018-10-05 | 2022-12-12 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 情報処理方法、及び、情報処理システム |
| JP2020170474A (ja) * | 2019-04-05 | 2020-10-15 | コベルコ建機株式会社 | スキル情報提示システム及びスキル情報提示方法 |
| JP7200864B2 (ja) * | 2019-07-17 | 2023-01-10 | トヨタ自動車株式会社 | 車両制御装置 |
| MX2022015121A (es) * | 2020-05-30 | 2023-01-11 | Crown Equip Corp | Monitoreo de vehiculos logisticos. |
-
2022
- 2022-02-25 EP EP22819828.9A patent/EP4354412A4/en active Pending
- 2022-02-25 WO PCT/JP2022/007797 patent/WO2022259638A1/ja not_active Ceased
- 2022-02-25 JP JP2023527498A patent/JP7734344B2/ja active Active
- 2022-02-25 CN CN202280038765.7A patent/CN117413304A/zh active Pending
-
2023
- 2023-11-28 US US18/520,938 patent/US12585283B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007079631A (ja) | 2005-09-09 | 2007-03-29 | Teruya:Kk | 交差点内における自動車の交通監視及び歩行弱者のための信号機制御システム |
| JP2016005932A (ja) * | 2014-06-20 | 2016-01-14 | 住友電気工業株式会社 | 車両の制御装置、及び車両 |
| JP2019016118A (ja) * | 2017-07-05 | 2019-01-31 | ヤフー株式会社 | 監視プログラム、監視方法、及び監視装置 |
| JP2020024708A (ja) * | 2018-05-31 | 2020-02-13 | みこらった株式会社 | 携帯端末、自動車及び通信システム |
| JP2021033523A (ja) * | 2019-08-21 | 2021-03-01 | トヨタ自動車株式会社 | 車両用操作システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4354412A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022259638A1 (https=) | 2022-12-15 |
| US20240094745A1 (en) | 2024-03-21 |
| CN117413304A (zh) | 2024-01-16 |
| US12585283B2 (en) | 2026-03-24 |
| EP4354412A4 (en) | 2024-08-21 |
| JP7734344B2 (ja) | 2025-09-05 |
| EP4354412A1 (en) | 2024-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12491814B2 (en) | Communication between autonomous vehicle and external observers | |
| JP7253446B2 (ja) | 情報処理方法、及び、情報処理システム | |
| Martínez-Cruz et al. | An outdoor navigation assistance system for visually impaired people in public transportation | |
| JP4996979B2 (ja) | ナビ協調走行制御システム、および、ナビ協調走行制御方法 | |
| JP2008197860A (ja) | 車両運行管理システム | |
| JP2015207129A (ja) | 歩行者通知システム | |
| JP4524673B2 (ja) | 自走車用安全交通管理システム、自走車用安全交通管理方法、及びそのプログラム | |
| US10609510B2 (en) | Mobile electronic apparatus, mobile electronic apparatus control method, a non-transitory computer readable recording medium, for providing warnings to a user of the apparatus based on the location of the electronic apparatus | |
| WO2023007663A1 (ja) | 監視システム、監視装置、及び監視方法 | |
| JP2023076554A (ja) | 情報処理方法 | |
| WO2022259638A1 (ja) | 制御方法および制御システム | |
| JP7263043B2 (ja) | アラート出力システム、アラート出力方法、及びプログラム | |
| WO2019044456A1 (en) | INFORMATION PROCESSING DEVICE, VEHICLE, AND ROAD EDGE UNIT | |
| KR20220046553A (ko) | 자율 차량 상호 작용 시스템 | |
| JP7437982B2 (ja) | 移動体制御装置、移動体制御方法、及びプログラム | |
| JPWO2007023899A1 (ja) | 運転支援装置、運転支援方法、運転支援プログラムおよび記録媒体 | |
| WO2007105504A1 (ja) | 経路誘導装置、経路誘導方法、経路誘導プログラムおよび記録媒体 | |
| JP7585919B2 (ja) | 運転支援制御装置、運転支援制御方法およびプログラム | |
| JP2020079996A (ja) | 車両の制御装置、入力装置及び入出力装置 | |
| CN119768850A (zh) | 信息处理方法以及信息处理装置 | |
| KR101660905B1 (ko) | 시각 장애인을 위한 네비게이션 시스템 및 방법 | |
| JP2018116013A (ja) | 情報通知装置及び情報通知方法 | |
| JP7552631B2 (ja) | 情報処理装置、情報処理方法、及び、移動体 | |
| US20260056546A1 (en) | Information processing method, terminal, and recording medium | |
| JP2003228797A (ja) | 仮想空間オブジェクト監視システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22819828 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280038765.7 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023527498 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022819828 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022819828 Country of ref document: EP Effective date: 20240108 |