US9154055B2 - Drive device - Google Patents
Drive device Download PDFInfo
- Publication number
- US9154055B2 US9154055B2 US13/577,040 US201113577040A US9154055B2 US 9154055 B2 US9154055 B2 US 9154055B2 US 201113577040 A US201113577040 A US 201113577040A US 9154055 B2 US9154055 B2 US 9154055B2
- Authority
- US
- United States
- Prior art keywords
- vibrator
- vibration
- driving member
- drive device
- vibrators
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related, expires
Links
Images























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/021—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors using intermittent driving, e.g. step motors, piezoleg motors
- H02N2/025—Inertial sliding motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/06—Drive circuits; Control arrangements or methods
- H02N2/065—Large signal circuits, e.g. final stages
- H02N2/067—Large signal circuits, e.g. final stages generating drive pulses
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/101—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using intermittent driving, e.g. step motors
Definitions
- the present invention relates to a drive device suitably implementable as an ultrasonic linear actuator using the SIDM (Smooth Impact Drive Mechanism (registered trademark)).
- SIDM Smooth Impact Drive Mechanism
- an ultrasonic linear actuator has a structure schematically illustrated in FIG. 20 , wherein it is adapted to transmit extending and contracting of a piezoelectric element to a rod (driving shaft), and move a driven member (movable body) engaged with the rod with a predetermined frictional force, based on a speed difference between during extending and during contracting of the piezoelectric element.
- a driven member movable body
- the driven member frictionally engaged with the rod is moved together therewith, as illustrated in FIGS. 20(A) and 20(B) , and then when the rod is contracted instantaneously enough to exceed the predetermined frictional force, the driven member is left at a extend position due to inertia, as illustrated in FIGS.
- the ultrasonic linear actuator is operable to move the driven member in an axial direction of the rod.
- the ultrasonic linear actuator is also adapted to perform the extending instantaneously and then perform the contracting slowly, thereby allowing a direction of movement of the driven member to be reversed with respect to that as described above.
- This type of ultrasonic linear actuator is structurally simple as compared to conventional Lorentz force-type motors and others, and capable of directly driving a load without using a speed reducing mechanism.
- the following Parent Document 1 proposes a drive device configured such that the rod is set up in a direction of an optical axis of a lens, and a holding member of a focusing lens is engaged with the rod, thereby realizing autofocusing.
- a magnetic force may be used, as well as a pressing force based on a spring or the like.
- the above ultrasonic linear actuator has problems of low speed performance and poor efficiency as compared to other types of ultrasonic motors similarly using a piezoelectric element, such as standing wave-type and traveling wave-type ultrasonic motors.
- the piezoelectric element is driven in a resonance region.
- a frequency of a drive signal is approximately 0.7 times as high as a resonance frequency as described later, so that the displacement (stroke) is as small as several ⁇ m at a maximum.
- FIG. 21 illustrates a relationship between respective displacements of the piezoelectric element and the driven member over time, in the ultrasonic linear actuator.
- the driven member is moved based on the speed difference between during stretching and during shrinking of the piezoelectric element.
- a pseudo-sawtooth drive signal as illustrated in FIG. 22 is given from a drive circuit to the piezoelectric element.
- displacements corresponding to respective oblique line sections in a sawtooth waveform of the drive signal are added up as a total displacement amount of the driven member, as illustrated in FIG. 21 .
- Patent Document 2 the applicant of this application previously disclosed that a sawtooth displacement can be obtained by appropriately selecting a drive frequency even if a rectangular-wave voltage as illustrated in FIG. 23 is given. Further, a theoretical background thereof is disclosed in the following Non-Patent Document 1. The theory may be summarized as follows. A basic of a sawtooth waveform as illustrated in FIG. 24(C) can be obtained by adding, to a sinusoidal signal having a fundamental frequency as illustrated in FIG. 24(B) , a second harmonic sinusoidal signal as illustrated in FIG. 24(A) . In other words, the sawtooth waveform includes, as components, a plurality of sinusoidal waves having different frequencies.
- FIG. 25 illustrates a change in a movement speed of the driven member when a duty ratio and a frequency of the rectangular wave are changed.
- This graph is illustrated as FIG. 20 in the Non-Patent Document 1, wherein the resonance frequency of the piezoelectric element and the rod and the drive voltage of the piezoelectric element are set to 200 kHz and 6 Vp-p, respectively, and a frictional force of the driven member with respect to the rod is set to 300 mN.
- the ultrasonic linear actuator is structurally simple, and capable of directly driving a load without using a speed reducing mechanism, as mentioned above.
- it can be expected to develop application to new products.
- it can be expected to use the actuator for a new purpose such as artificial muscle of a humanoid robot.
- it is possible to promote microminiaturization using a piezoelectric thin film, specifically, structurally simplify a Langevin vibrator using a thin film or a non-laminate structure.
- a micromachine such as an actuator for use in a distal end of an endoscope.
- the present invention has been made in view of the above circumstances, and an object thereof is to provide a drive device capable of increasing displacement vibration to improve a movement speed, and improve energy efficiency.
- a drive device of the present invention is adapted to move a driven member based on a speed difference between during extending and during contracting in a course of vibration of a vibrator.
- the vibrator is formed in a structure which has two resonance modes identical in terms of a vibration direction, and allows a ratio between respective resonance frequencies of the two resonance modes to become approximately 2.
- a drive signal to be given to the vibrator is configured to approximately conform to the two resonance modes.
- the drive device having the above configuration makes it possible to generate pseudo-sawtooth displacement vibration multiplied by an amplitude amplification factor Q through resonance, thereby improving a movement speed, and allow a larger part of input energy to be used for mechanical vibration, thereby improving energy efficiency.
- FIG. 1 is a perspective view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a first embodiment.
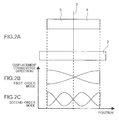
- FIGS. 2A-2C are a side view schematically illustrating a state before adjustment of a vibration mode in the ultrasonic linear actuator illustrated in FIG. 1 .
- FIG. 3 is a perspective view schematically illustrating a state before adjustment of the vibration mode in the ultrasonic linear actuator illustrated in FIG. 1 .
- FIGS. 4A-4C are a side view schematically illustrating a state after adjustment of the vibration mode in the ultrasonic linear actuator illustrated in FIG. 1 .
- FIGS. 5A-5B are graphs illustrating a state of a change in resonance frequency of each of a first-order mode and a second-order mode, caused by the adjustment.
- FIG. 6 is a block diagram illustrating one example of a configuration of a piezoelectric element drive circuit in the ultrasonic linear actuator illustrated in FIG. 1 .
- FIGS. 7A-7B are block diagrams illustrating another example of the configuration of the piezoelectric element drive circuit in the ultrasonic linear actuator illustrated in FIG. 1 .
- FIG. 8 is a waveform chart of a drive signal from the drive circuit illustrated in FIG. 7(A) .
- FIGS. 9A-9C are a side view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a second embodiment.
- FIG. 10 is a side view schematically illustrating one example of a structure of an ultrasonic motor which is a drive device according to a third embodiment.
- FIG. 11 is a side view schematically illustrating another example of the structure of the ultrasonic motor which is the drive device according to the third embodiment.
- FIG. 12 is a perspective view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a fourth embodiment.
- FIG. 13 is a sectional view of the ultrasonic linear actuator illustrated in FIG. 12 .
- FIGS. 14A-14H are waveform charts illustrating a superimposition state of a drive signal in the ultrasonic linear actuator illustrated in FIGS. 12 and 13 .
- FIG. 15 is a sectional view schematically illustrating a structure of an ultrasonic motor which is the drive device according to the fourth embodiment.
- FIG. 16 is a side view schematically illustrating a structure of a linear actuator which is a drive device according to a fifth embodiment.
- FIG. 17 is a sectional view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a sixth embodiment.
- FIGS. 18A-18B are views schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a seventh embodiment.
- FIG. 19 is a sectional view schematically illustrating another example of the ultrasonic linear actuator illustrated in FIG. 18 .
- FIGS. 20A-20C are a side view schematically illustrating a structure of a typical conventional ultrasonic linear actuator.
- FIG. 21 is a graph illustrating a relationship between respective displacements of a piezoelectric element and a driven member over time, in an ultrasonic linear actuator.
- FIG. 22 is a waveform chart of a typical conventional drive signal to be given to an ultrasonic linear actuator.
- FIG. 23 is a waveform chart of a drive signal to be given to a conventional ultrasonic linear actuator and an ultrasonic linear actuator according to one embodiment of the present invention.
- FIGS. 24A-24C are waveform charts for explaining one example of a method for forming the drive signal illustrated in FIG. 22 .
- FIG. 25 is a graph illustrating a change in a movement speed of a driven member with respect to changes in a duty ratio and a frequency, in cases where the rectangular-wave drive signal illustrated in FIG. 23 is used.
- FIGS. 26A-26B are graphs for explaining a problem in the drive signal illustrated in FIG. 22 .
- FIG. 27 is a chart illustrating displacement waveforms of moving rightward and correspondence voltage waveforms required to the displacement waveforms.
- FIG. 28 is a chart illustrating displacement waveforms of moving leftward and correspondence voltage waveforms required to the displacement waveforms.
- FIG. 1 is a perspective view schematically illustrating a structure of an ultrasonic linear actuator 1 which is a drive device according to a first embodiment.
- This ultrasonic linear actuator 1 comprises a fixed member 2 , a support plate 3 , a piezoelectric element 4 , a piezoelectric element 5 , a driving member 6 , a driving member 7 , and a driven member 8 .
- the ultrasonic linear actuator 1 is roughly configured such that the piezoelectric elements 4 , 5 each serving as a first vibrator are attached, respectively, to opposite surfaces of the support plate 3 provided to stand upwardly from the fixed member 2 , wherein the driving members 6 , 7 are attached, respectively, to distal edge faces of the piezoelectric elements 4 , 5 , and the driven member 8 is provided with respect to at least one of the driving members 6 , 7 (in FIG. 1 , only the driving member 6 ) in a frictionally engageable manner.
- the support plate 3 is capable of supporting a weight of the piezoelectric elements 4 , 5 and the driving members 6 , 7 , and formed from a thin plate in order to reduce vibration propagation therethrough.
- it is made of duralumin, and formed to have a thickness of 0.2 mm.
- Each of the piezoelectric elements 4 , 5 is composed, for example, of a Langevin vibrator adapted to be vibrated in a thickness direction, wherein each of the driving members 6 , 7 is fixedly attached to one of opposite edge faces of a respective one of the piezoelectric elements 4 , 5 in a direction of the vibration, and the other edge face is attached to one of the opposite surfaces of the support plate 3 .
- each of the piezoelectric elements 4 , 5 As means for joining each of the piezoelectric elements 4 , 5 to the support plate 3 , adhesive bonding is employed. Alternatively, it may be joined in a similar manner to a bolted Langevin vibrator with higher reliability. In this configuration, when equivalent drive signals are input from a drive circuit into respective ones of the piezoelectric elements as described later, generated vibrations are propagated to respective ones of the driving members 6 , 7 without being propagated to the support plate 3 because the vibrations are mutually canceled out on the side of the support plate 3 .
- Each of the driving members 6 , 7 is a rod-shaped member, and the driven member 8 is engaged therewith with a predetermined frictional force. It is necessary for each of the driving members 6 , 7 to transmit, through not only a base end but also a distal end thereof, a displacement of a respective one of the piezoelectric elements 4 , 5 without lag.
- each of the driving members 6 , 7 is made of a material which is a rigid body in actual drive conditions.
- the frictional force in the driven member 8 may be generated by a pressing force based on a spring or the like. Alternatively, it may be generated, for example, by a magnetic force.
- the driven member 8 is coupled to a holding frame of a focusing lens or a zoom lens.
- an ultrasonic linear actuator adapted to transmit extending and contracting of a piezoelectric element to a driving member, and move a driven member engaged with the driving member with a predetermined frictional force, based on a difference between respective speeds during extending and during contracting of the piezoelectric element, a sawtooth waveform as a drive waveform for causing the speed difference will be discussed here.
- the piezoelectric elements 4 , 5 and the driving members 6 , 7 is formed to have at least first-order and second-order resonance modes, in response to a drive signal given from the aftermentioned drive circuit to the piezoelectric elements 4 , 5 , and adjusted to allow resonance frequencies of the two modes to have an approximately one-to-two relation, for example, by cutting/grinding or shaping.
- the adjustment method will be described below.
- the piezoelectric elements 4 , 5 are installed by themselves as illustrated in FIG. 2(A) .
- each of the driving members 6 , 7 is fixedly attached to one end of a respective one of the piezoelectric elements 4 , 5 , whereon duralumin is used as a material for the driving members 6 , 7 .
- each of the piezoelectric elements 4 , 5 has a diameter of 10 mm and a length (thickness) of 5 mm
- each of the driving members 6 , 7 has a diameter of 10 mm and a length of 45 mm.
- An ultrasonic linear actuator 1 ′ in this state is schematically illustrated in FIG. 3 .
- the driven member 8 is omitted in FIG. 3 .
- each of the driving members 6 , 7 is cut or shaved to reduce a diameter thereof only in a longitudinal range W from a distal end thereof.
- the longitudinal range W is set to 25 mm.
- the resonance frequency ratio fr2/fr1 can be lowered, and a level of the lowering can be adjusted by a shaving amount.
- each of two shaved portions 6 a , 7 a in the longitudinal range W corresponds to a vibration antinode, so that, after the shaving, the resonance frequency fr is increased as indicated by a change from the solid line to the broken line.
- FIG. 5(A) illustrates a relationship between the shaving amount and each of the first-order and second-order resonance frequencies fr1, fr2, and
- FIG. 5(B) illustrates a relationship between the shaving amount and the resonance frequency ratio fr2/fr1.
- FIG. 6 is a block diagram of a drive circuit 9 which is one example of a configuration of a drive circuit for driving the piezoelectric elements 4 , 5 .
- This drive circuit 9 comprises a control circuit 90 , an oscillator 92 , a frequency divider 93 , a phase shifter 94 , a phase shifter 95 , a change-over switch 96 , and an adder 97 .
- the oscillator 92 is operable to oscillate a signal S 2 ′ having the second resonance frequency fr2.
- This oscillation signal S 2 ′ is input into the frequency divider 93 .
- the frequency divider 93 is operable to frequency-divide the oscillation signal S 2 ′ into halves to create a signal S 1 having the first resonance frequency fr1.
- the oscillation signal S 2 ′ from the oscillator 92 is also input into each of the two phase shifters 94 , 95 .
- the phase shifter 94 is operable to shift a phase of the oscillation signal S 2 ′ by +90° to create a signal S, and give it to one of two contact points of the change-over switch 96
- the phase shifter 95 is operable to shift the phase of the oscillation signal S 2 ′ by ⁇ 90° to create a signal S, and give it to the other contact point of the change-over switch 96 .
- the control circuit 90 is operable to switch the change-over switch 96 depending on the movement direction of the driven member 8 .
- one of two signals S 2 having a frequency of fr2, and phases mutually shifted by 180° and each shifted from the signal having the first resonance frequency fr1 by 90° is selected and input into the adder 97 .
- the adder 97 is operable to add the signal S 2 having the second resonance frequency fr2 and a phase shifted by +90° or ⁇ 90°, to the signal S 1 having the first resonance frequency fr1, and the output the resulting signal to the piezoelectric elements 4 , 5 .
- FIG. 14 is an operational waveform chart of the above drive circuit 9 .
- FIG. 14(A) and FIG. 14(B) illustrate the sinusoidal signal S 1 having the frequency fr1 and the sinusoidal signal S 2 ′ having the frequency fr2, respectively. Assume that the phases of these signals are synchronized with each other. When these signals are added in the same phase, the resulting signal has an amplitude as illustrated in FIG. 14(C) . In FIG. 14(C) , an amplitude ratio between the sinusoidal signals S 1 , S 2 ′ is 2:1.
- FIG. 14(D) illustrates a signal formed by reducing a level of the signal S 2 ′ having the second resonance frequency fr2 (by increasing the amplitude ratio).
- the waveform illustrated in FIG. 14(C) or FIG. 14(D) is used to drive the driven member.
- FIG. 7(A) is a block diagram of a drive circuit 9 a which is another example of the configuration of the drive circuit for driving the piezoelectric elements 4 , 5 .
- This drive circuit 9 a is a so-called H-bridge circuit which comprises a series circuit of a p-type FET Q 1 and an n-type FET Q 2 , and a series circuit of a p-type FET Q 3 and an n-type FET Q 4 , each connected between a+V power-supply line and a grounding line.
- Each of the piezoelectric elements 4 , 5 is connected to couple respective midpoints of the series circuits.
- Each of the FETs Q 1 to Q 4 is on-off controlled by the control circuit 91 .
- Modes of control signals S 1 to S 4 to be output from the control circuit 91 to respective ones of the FETs Q 1 to Q 4 , and a voltage Vs to be applied across opposite terminals of each of the piezoelectric elements 4 , 5 according to ON/OFF of the FETs Q 1 to Q 4 , are as illustrated, for example, in FIG. 8 .
- the two FETs Q 1 , Q 4 or the two FETs Q 2 , Q 3 provided at diagonal positions of the H-bridge are driven with the same phase, and the set of FETs Q 1 , Q 4 and the set of FETs Q 2 , Q 3 are driven with mutually reverse phases.
- a rectangular-wave drive signal is applied to the piezoelectric elements 4 , 5 .
- a duty ratio of the drive signal can be set to about 0.3 to drive the driven member 8 in one direction, and can be set to about 0.7 to driven the driven member 8 in the opposite direction.
- a waveform to be input into the piezoelectric elements 4 , 5 to provide a desired displacement waveform to the driven member 8 is as illustrated in Table 2 and Table 3 (listed in the column “Using H-bridge circuit”).
- the rectangular wave has the same phase as that of the sawtooth displacement waveform (duty ratio: 0.3), whereas, in the drive device 1 according to the first embodiment, the rectangular wave has a reverse phase with respect to the sawtooth displacement waveform (duty ratio: 0.7), as with the drive circuit 9 .
- the duty ratio is 0.3.
- the ultrasonic linear actuator 1 configured such that extending and contracting of each of the piezoelectric elements 4 , 5 are transmitted to a respective one of the rod-shaped driving members 6 , 7 , and the driven member 8 engaged with the driving member 6 with a predetermined frictional force is moved based on a speed difference between during extending and during contracting of the piezoelectric element 4 , 5
- the following feature is employed in a signal from the drive circuit 9 , 9 a to the piezoelectric element 4 , 5 , to produce pseudo-sawtooth displacement vibration for causing the speed difference in an engagement section between the driving member 6 and the driven member 8 .
- vibration at a fundamental frequency is superimposed with at least harmonic vibration having a frequency two times as high as the fundamental frequency.
- vibration at a harmonic of the resonance frequency is obtained (across the resonance frequency).
- the drive signal is formed as a signal including two components having the resonance frequencies fr1, fr2 in which the resonance frequency ratio fr2/fr1 is about 2, and a shape of the piezoelectric elements 4 , 5 and the driving members 6 , 7 is adjusted to allow the piezoelectric elements 4 , 5 and the driving members 6 , 7 to be resonated at the two resonance frequencies fr1, fr2.
- the piezoelectric elements 4 , 5 and the driving members 6 , 7 can be used in a resonance state, so that the displacement vibration can be multiplied by an amplitude amplification factor Q.
- the ultrasonic linear actuator 1 in the ultrasonic linear actuator 1 according to the first embodiment, it becomes possible to improve a movement speed thereof, and allow a larger part of input energy to be used for mechanical vibration, so as to improve energy efficiency.
- the ultrasonic linear actuator 1 can be reduced in size or increased in torque, so that it can also be used for new purposes.
- the rectangular wave may be generated at three levels of ⁇ V, 0 and +V.
- the rectangular wave may be generated at three levels of ⁇ V, 0 and +V.
- the rectangular wave may be generated at three levels of ⁇ V, 0 and +V.
- the rectangular wave may be generated at three levels of ⁇ V, 0 and +V.
- it may be a waveform providing a voltage illustrated in FIG. 14(G) .
- a voltage itself to be input into each of the piezoelectric elements 4 , 5 has a waveform close to the pseudo-sawtooth waveform, so that phase conditions in the first-order and second-order modes can be matched with each other.
- bipolar transistors may be used to provide a triangular-wave illustrated in FIG. 14 (H).
- the drive circuit is not limited to the drive circuit 9 a illustrated in FIG. 7(A) , but may be composed of a simple push-pull circuit, such as a drive circuit 9 b illustrated in FIG. 7(B) .
- a simple push-pull circuit such as a drive circuit 9 b illustrated in FIG. 7(B) .
- an application voltage Vs to each of the piezoelectric elements 4 , 5 is +V.
- the II-bridge circuit 9 a illustrated in FIG. 7(A) is capable of applying a double voltage+2V to each of the piezoelectric elements 4 , 5 , and generating the three-level voltage.
- a portion of the driving member in a predetermined range W which corresponds to a vibration antinode in the first-order resonance mode and corresponds to a vibration antinode and a vibration node in the second-order resonance mode is formed to be reduced in diameter, for example, by cutting or grinding.
- FIG. 9(A) is a side view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a second embodiment.
- this ultrasonic linear actuator 11 an element or component similar to and corresponding to that in the ultrasonic linear actuator 1 illustrated in FIGS. 1 and 4 is assigned with the same reference numeral or code, and its description will be omitted.
- an outer peripheral surface of a rod-shaped driving member 16 is formed as a continuous curved surface, i.e., the diameter of the driving member 16 is smoothly (continuously) changed in an axial direction thereof.
- the outer peripheral surface of the driving member 16 is formed as a continuous curved surface over approximately the entire length thereof. Further, a driving member 17 having a constant diameter is coupled to a distal end of the driving member 16 , and a driven member 8 is driven by the driving member 17 .
- the driving member 16 is an elastic body capable of producing first-order and second-order resonance modes as with the aforementioned driving members 6 , 7 .
- the driving member 17 is made of a material for allowing the driving member 17 to behave as a rigid body at frequencies fr1, fr2 of the two resonance modes, i.e., the material of the driving member 17 is required to have a high elastic modulus.
- the driving member 17 is also required to have a low density.
- the driving member 16 is made, for example, of duralumin as with the first embodiment, and the driving member 17 is made, for example, of carbon fiber.
- an adequate shape of the driving member 16 is changed due to the driving member 17 coupled thereto.
- the shape of the driving member 16 is adjusted to allow the resonance frequency ratio fr2/fr1 to become 2.
- the driving member 16 is formed in an optimal shape capable of providing the resonance frequency ratio 2, and eliminating a stepped portion.
- the driving member 16 can be expected to avoid stress concentration to improve reliability, and minimize vibration loss (increase Q) to achieve further improved speed performance based on resonance.
- the driving members 16 , 17 are formed to extend from a piezoelectric element 4 , only one set of them is provided, and one end of the piezoelectric element 4 in the vibration direction is fixed to a fixed object 13 .
- a fixed object is used which is made of a material having a high density and a high elastic modulus, such as tungsten, and formed to have a weight sufficiently greater than that of these components.
- This configuration makes it possible to eliminate the need for providing an additional set of the piezoelectric element 4 and the driving members 16 , 17 , to allow vibration generated in the piezoelectric element 4 to be propagated toward the driving members 16 , 17 , thereby downsizing the configuration.
- FIGS. 10 and 11 are side views schematically illustrating respective structures of two types of ultrasonic motors each of which is a drive device according to a third embodiment.
- these ultrasonic motors 1 a , 11 a an element or component similar to and corresponding to that in the ultrasonic linear actuators 1 , 11 illustrated in FIGS. 1 , 4 and 9 is assigned with the same reference numeral or code, and its description will be omitted.
- a driven member 28 comprises a rotor 28 a having an outer peripheral surface serving as an engagement section with respect to a driving member 6 , 16 , and an output take-out shaft 28 b serving as a rotary shaft of the rotor.
- the an output take-out shaft 28 b is rotatably supported by a pair of brackets 28 c , and the bracket 28 c is elastically biased by a support member 28 b in a direction from a fixed position of a fixed member 2 or the like toward the driving member 6 , 16 .
- a displacement of the driving member 6 , 16 in the vibration direction i.e., a linear displacement
- a displacement of the driving member 6 , 16 in the vibration direction i.e., a linear displacement
- a driving member 17 is not coupled to the driving member 16 .
- the driving member 17 may be coupled thereto.
- FIG. 12 is a perspective view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a fourth embodiment
- FIG. 13 is a sectional view of the ultrasonic linear actuator.
- this ultrasonic linear actuator 21 an element or component similar to and corresponding to that in the ultrasonic linear actuators 1 , 11 illustrated in FIGS. 1 , 4 and 9 is assigned with the same reference numeral or code, and its description will be omitted.
- the ultrasonic linear actuator 21 comprises, as a piezoelectric element, two first piezoelectric elements 24 , 25 each having a resonance frequency fr1, and a second piezoelectric element 27 having a resonance frequency fr2, wherein the piezoelectric element 24 and the piezoelectric element 27 are coupled together through a coupling member 26 .
- the piezoelectric element 25 in the piezoelectric elements 24 , 25 each having one end attached to a respective one of opposite surfaces of a support plate 3 composed of a thin plate is a dummy for cancelling out vibration against the support plate 3 , and one end of the coupling member 26 is fixedly attached to the other end of the piezoelectric element 24 .
- the other end of the coupling member 26 is formed as a large-diameter head 26 a which is fitted into an inner peripheral surface 27 b of the piezoelectric element 27 formed in a tubular shape, and fixedly attached to the piezoelectric element 27 at an intermediate position in a length direction thereof (the vibration direction).
- vibration of the piezoelectric element 24 is transmitted to the intermediate position of the piezoelectric element 27 only through the coupling member 26 .
- a driving member 280 made of carbon fiber as with the driving member 17 is coupled to an end face of the piezoelectric element 27 on a side opposite to the coupling member 26 , and a driven member 8 is frictionally engaged with the driving member 280 .
- a sinusoidal signal having a resonance frequency fr1 is given to each of the first piezoelectric elements 24 , 25 , and a sinusoidal signal having a resonance frequency fr2 is phase-adjusted and then given to the second piezoelectric element 27 .
- a displacement y1 is given to the first piezoelectric element 24
- a portion A in FIG. 13 has the displacement y1.
- a displacement y2 is given to the second piezoelectric element 27
- a portion B has a displacement y1+y2.
- the two piezoelectric elements 24 , 27 can be used to superimpose two displacements.
- a length of each of the first and second piezoelectric elements is adjusted such that the resonance frequency fr1 of each of the first piezoelectric elements 24 , 25 is set to 100 kHz, and the resonance frequency fr2 of the second piezoelectric element 27 is set to 200 kHz.
- V 1 and V 2 are respective voltages to be applied to each of the piezoelectric elements 24 , 25 and the piezoelectric element 27 , both of the piezoelectric elements 24 , 25 ; 27 are placed in a resonance state, and a sawtooth displacement is obtained in the portion B.
- V 1 ⁇ sin(2 ⁇ 100 k ⁇ t )
- V 2 ⁇ 0.25*sin(2 ⁇ 200 k ⁇ t )
- the ultrasonic linear actuator 21 configured such that extending and contracting of the piezoelectric elements 24 , 27 are transmitted to the rod-shaped driving member 280 , and the driven member 8 engaged with the driving member 280 with a predetermined frictional force is moved based on a speed difference between during extending and during contracting of the piezoelectric elements 24 , 27 , the following feature is employed to produce pseudo-sawtooth displacement vibration for causing the speed difference in an engagement section between the driving member 280 and the driven member 8 .
- the two piezoelectric elements 24 , 27 are provided such that the first piezoelectric element 24 is located on a fixed side, and the second piezoelectric element 27 is located on a driving side, wherein the coupling member 26 is provided to couple therebetween, and the driving member 280 is fixedly attached to the second piezoelectric element 27 . Further, the driven member 8 is engaged with the driving member 280 with a predetermined frictional force. Then, two phase-adjusted sinusoidal-wave drive signals are given from a non-illustrated drive circuit to the first and second piezoelectric elements 24 , 27 , respectively.
- the ultrasonic linear actuator 21 the first and second piezoelectric elements 24 , 27 and the coupling member 26 can be used in a resonance state, so that the displacement vibration can be multiplied by an amplitude amplification factor Q to improve the movement speed, and allow a larger part of input energy to be used for mechanical vibration, so as to improve energy efficiency.
- the ultrasonic linear actuator 21 can be reduced in size or increased in torque, so that it can also be used for new purposes.
- the ultrasonic linear actuator 21 may be modified to an ultrasonic motor as illustrated in FIG. 15 , by using a driven member 28 comprising a rotor 28 a and an output take-out shaft 28 b , in place of the driven member 8 , in the same manner as that in the ultrasonic motors 1 a , 11 a illustrated in FIGS. 10 and 11 . In this case, a rotational displacement is output.
- FIG. 16 is a side view schematically illustrating a structure of a linear actuator which is a drive device according to a fifth embodiment.
- this linear actuator 31 an element or component similar to and corresponding to that in the ultrasonic linear actuator 11 illustrated in FIG. 9(A) is assigned with the same reference numeral or code, and its description will be omitted.
- a voice coil motor 34 is employed as a vibrator.
- the vibrator is not limited to a piezoelectric element, but may be realized using any other suitable mechanical output element.
- the voice coil motor 34 is employed which is one example of a magnetostrictor which is a solid-state actuator as with a piezoelectric element. It is to be understood that the same drive principle may be applied to an electromagnetic actuator such as a giant magnetostrictor, and an electrostatic actuator, as well as the voice coil motor 34 . In the voice coil motor 34 , a frequency response thereof is low.
- the driving member 16 is made of a low-rigidity material to produce a resonance. For this purpose, a plastic material is employed.
- FIG. 17 is a sectional view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a sixth embodiment.
- this ultrasonic linear actuator 21 a an element or component similar to and corresponding to that in the ultrasonic linear actuator 21 illustrated in FIG. 13 is assigned with the same reference numeral or code, and its description will be omitted.
- a second piezoelectric element 27 a is formed to have a diameter greater than that of a first piezoelectric element 24 , and insertingly receive the first piezoelectric element 24 .
- a coupling member 29 is formed in a circular disk shape having a diameter greater than that of the first piezoelectric element 24 , and fixedly attached to one end of the first piezoelectric element 24 .
- the second piezoelectric element 27 a is formed in a tubular shape to insertingly receive the coupling member 29 and the first piezoelectric element 24 , and fixedly attached to an outer peripheral edge of the coupling member 29 at a midpoint thereof in the vibration direction.
- a driving member 28 is attached to an end of the second piezoelectric element 27 a on a side opposite to the first piezoelectric element 24 , to serve as an engagement section with respect to a driven member 8 .
- the ultrasonic linear actuator 21 a constructed in this manner can enhance support strength for the second piezoelectric element 27 a with respect to the first piezoelectric element 24 .
- FIG. 18(A) is a perspective view schematically illustrating a structure of an ultrasonic linear actuator which is a drive device according to a seventh embodiment
- FIG. 18(B) is a sectional view of the ultrasonic linear actuator.
- this ultrasonic linear actuator 41 an element or component similar to and corresponding to that in the ultrasonic linear actuator 21 , 21 a illustrated in FIGS. 13 and 17 is assigned with the same reference numeral or code, and its description will be omitted.
- the ultrasonic linear actuator 41 comprises a first driving member 46 formed in a rod shape and provided between the first piezoelectric element 24 and the second piezoelectric element 27 , wherein the rod shape first driving member 46 has a base end is fixedly attached to the first piezoelectric element.
- Each of the second piezoelectric element 27 and a second driving member 47 is formed in a tubular shape to insertingly receive the first driving member 46 .
- the second driving member 47 has an inner peripheral surface frictionally engaged with an outer peripheral surface of the first driving member 46 , and the second piezoelectric element 27 is fixedly attached to an end of the second driving member 47 on a side opposite to the first piezoelectric element 24 .
- the ultrasonic linear actuator 41 configured in this manner can also superimpose resonance vibrations using the two piezoelectric elements 24 , 25 ; 27 applied with respective sinusoidal signals.
- the first driving member 46 is driven by a simple sinusoidal wave
- the second driving member 47 is also driven by a simple sinusoidal wave having a double frequency.
- a pseudo-sawtooth relative displacement is produced in a frictional engagement section between the two driving members, and a set of the first piezoelectric element 24 and the first driving member 46 , and a set of the second piezoelectric element 27 and the second driving member 47 , are relatively moved in the vibration direction (In this embodiment, the set of the first piezoelectric element 24 and the first driving member 46 is fixed to a support plate 3 provided to stand upwardly from a fixed member 2 . Thus, the set of the second piezoelectric element 27 and the second driving member 47 is moved as a driven member.
- a component corresponding to each of the piezoelectric elements 24 , 25 ; 27 consists entirely of a piezoelectric element, such as an ultrasonic linear actuator 41 a illustrated in FIG. 19 , but only a central portion of the component may be formed as a piezoelectric element 24 a , 25 a ; 27 a , and remaining portions on both sides of the central portion may be formed as vibration transmission members 48 , 49 .
- a resonance mode usable in the embodiments is longitudinal vibration
- a resonance mode usable in the embodiments may be any type, such as transverse vibration, flexural vibration or torsional vibration, or may be any combination of different vibration modes, such as a combination of longitudinal vibration and flexural vibration.
- a material having a large piezoelectric constant is often used in order to take out a large displacement.
- the material having a large piezoelectric constant exhibits a low Q in a resonance state.
- the Q value is 1000 or more in one embodiment, preferably at least 100 or more.
- a laminated piezoelectric element capable of large displacement is often used in order to obtain high speed.
- an ultrasonic linear actuator according to the embodiments can achieve sufficiently high power even using lower-cost bulk piezoelectric elements, and can achieve sufficient drive performance even using minute piezoelectric elements.
- a drive device which comprises: a first vibrator adapted to be vibrated in a predetermined direction as a vibration direction; a driving member attached to one end of the first vibrator in the vibration direction and adapted to be displaceably driven in the vibration direction by the first vibrator; a driven member engaged with the driving member with a predetermined frictional force; and a drive circuit for giving a drive signal to the first vibrator to vibrate the first vibrator, wherein: the first vibrator is formed to have at least first-order and second-order resonance modes in a vibration system, and allow a frequency of the second-order resonance mode to become approximately two times as high as a frequency of the first-order resonance mode; and the drive circuit is operable to generate a signal by superimposing at least two components approximately conforming to respective ones of the frequencies of the first-order and second-order resonance modes having the approximately one-to-two relation, and give the signal to the first vibrator as the drive signal, thereby producing resonantly-amplified pseudo-sawtooth
- the ultrasonic linear actuator configured such that extending and contracting of the first vibrator such as a piezoelectric element are transmitted to the driving member, and the driven member engaged with the driving member with a predetermined frictional force is moved based on a speed difference between during extending and during contracting of the first vibrator
- the following feature is employed to produce pseudo-sawtooth displacement vibration for causing the speed difference in an engagement section between the driving member and the driven member.
- vibration at a fundamental frequency may be superimposed with at least harmonic vibration having a frequency two times as high as the fundamental frequency.
- the harmonic vibration is obtained by giving a rectangular-wave drive signal to a vibrator and setting a frequency of the drive signal to about 0.7 times as high as a resonance frequency of a vibration system.
- a shape of the first vibrator and the driving member is adjusted to allow the frequency of the second-order resonance mode to become approximately two times as high as the frequency of the first-order resonance mode, and the drive signal to be given from the drive circuit to the first vibrator is generated by superimposing at least two components approximately conforming to respective ones of the frequencies of the two resonance modes.
- the drive device configured as above can be used in a resonance state, so that the displacement vibration can be multiplied by an amplitude amplification factor Q to improve a movement speed thereof, and allow a larger part of input energy to be used for mechanical vibration, so as to improve energy efficiency. Therefore, the drive device can be reduced in size or increased in torque, so that it can also be used for new purposes.
- the driving member has a rod-like shape, wherein a portion of the driving member in a predetermined range from one end thereof on a side opposite to the first vibrator is formed to be reduced in diameter so as to lower a mechanical impedance, whereby the frequency of the second-order resonance mode is set to approximately two times as high as that of the first-order resonance mode.
- a portion of the driving member in a predetermined range which corresponds to a vibration antinode in the first-order resonance mode and corresponds to a vibration antinode and a vibration node in the second-order resonance mode is formed to be reduced in diameter, for example, by cutting or grinding.
- the mechanical impedance may be lowered by changing a material of the driving member from an axially intermediate position thereof.
- the driving member has a rod-like shape, wherein an outer peripheral surface of the driving member at least in the predetermined range is formed as a continuous curved surface.
- the diameter of the driving member is smoothly (continuously) changed in an axial direction thereof.
- the driving member is formed in an optimal shape capable of providing the resonance frequency ratio 2, and eliminating a stepped portion.
- the driving member is formed in an optimal shape capable of providing the resonance frequency ratio 2, and eliminating a stepped portion.
- the drive circuit in the above drive device is provided with an H-bridge circuit, and operable to generate a rectangular wave or a three-level stepped wave.
- the drive circuit has the H-bridge circuit, wherein the first vibrator may be provided to couple respective midpoints of the H-bridge.
- the first vibrator may be provided to couple respective midpoints of the H-bridge.
- the drive device configured as above can obtain a large vibration amplitude.
- a drive device which comprises: a first vibrator adapted to be vibrated in a predetermined direction as a vibration direction; a second vibrator provided on the side of one end of the first vibrator in the vibration direction and adapted to be displaceably driven in the vibration direction by the first vibrator, and further vibrated in the predetermined direction, independently; a driven member engaged with the second vibrator or a driving member coupled to the second vibrator, with a predetermined frictional force; and a drive circuit for giving drive signals to the first and second vibrators, respectively, to vibrate the first and second vibrators, wherein: the first and second vibrators are formed to have two resonance modes in a vibration system, respectively, and allow a ratio between respective frequencies of the resonance modes in the first and second vibrators to become approximately 2; and the drive circuit is operable to generate two signals each having a component approximately conforming to a respective one of the frequencies in the first-order and second-order resonance modes having the approximately one-to-two relation, and give the signals to respective ones of the
- the two vibrators each composed, for example, of a piezoelectric element, are provided such that the first vibrator is located on a fixed side, and the second vibrator is located on a driving side, wherein the driven member is engaged with the driving member with a predetermined frictional force. Then, the driven member is moved by producing a speed difference between during extending and during contracting of each of the first and second vibrators.
- first and second vibrators are formed to have two resonance modes in a vibration system, respectively, and allow a ratio between respective frequencies of the resonance modes in the first and second vibrators to become approximately 2, and each of the drive signals to be given from the drive circuit to the two vibrator is generated to have a component approximately conforming to a respective one of the frequencies in the two resonance modes.
- the drive device configured as above can be used in a resonance state, so that the displacement vibration can be multiplied by an amplitude amplification factor Q to improve a movement speed thereof, and allow a larger part of input energy to be used for mechanical vibration, so as to improve energy efficiency. Therefore, the drive device can be reduced in size or increased in torque, so that it can also be used for new purposes.
- the drive device using the two vibrators comprises a coupling member interposed between the first vibrator and the second vibrator.
- the coupling member has a shank and a head having a diameter greater than that of the shank, and the shank has a distal end fixedly attached to the one end of the first vibrator.
- the second vibrator is formed in a tubular shape to insertingly receive the coupling member, and fixedly attached to the head of the coupling member at a midpoint thereof in the vibration direction, and the engagement section with respect to the driven member is provided on the side of an end of the second vibrator opposite to the first vibrator.
- the drive device using the two vibrators comprises a coupling member interposed between the first vibrator and the second vibrator.
- the coupling member is formed to have a diameter greater than the first vibrator and fixedly attached to the one end of the first vibrator.
- the second vibrator is formed in a tubular shape to insertingly receive the coupling member and the first vibrator, and fixedly attached to an outer peripheral edge of the coupling member at a midpoint thereof in the vibration direction, and the engagement section with respect to the driven member is provided on the side of an end of the second vibrator opposite to the first vibrator.
- a drive device using the two vibrators preferably, which comprises: a first vibrator adapted to be vibrated in a predetermined direction as a vibration direction; a first driving member provided on the side of one end of the first vibrator in the vibration direction; a second driving member engaged with the first driving member with a predetermined frictional force; a second vibrator provided to the second driving member and adapted to be vibrated in the same direction as that of the first vibrator; and a drive circuit for giving drive signals to the first and second vibrators, respectively, to vibrate the first and second vibrators, wherein: the first and second vibrators are formed to have two resonance modes in a vibration system, respectively, and allow a ratio between respective frequencies of the resonance modes in the first and second vibrators to become approximately 2; and the drive circuit is operable to generate two signals each having a component approximately conforming to a respective one of the frequencies in the first-order and second-order resonance modes having the approximately one-to-two relation, and give the signals to respective ones of the first and
- the drive device comprises two vibration transmission members each fixedly attached to a respective one of opposite end faces of the second vibrator.
- Each of the vibration transmission members is formed in a tubular shape to have approximately the same diameter.
- One of the vibration transmission members is interposed between the driving member and the second vibrator.
- the other end of the first vibrator in the vibration direction is fixed to a fixed object.
- the drive device where the driving member, the coupling member and the second vibrator are formed to extend from the first vibrator, one end of the first vibrator in the vibration direction is fixed to the fixed object, and the other end is connected to the driving member, the coupling member and the second vibrator.
- a fixed object which is made of a material having a high density and a high elastic modulus and formed to have a sufficiently large weight.
- the drive device configured as above can eliminate a need for providing an additional set of the drive device, to allow vibration generated in the first vibrator to be propagated toward the driving member and the coupling member, thereby downsizing the configuration.
- the driven member comprises a rotor having an outer peripheral surface constituting the engagement section, and an output take-out shaft serving as a rotary shaft of the rotor.
- a displacement of the driving member in the vibration direction i.e., a linear displacement
- a rotational displacement can be taken out in the form of a rotational displacement
- the first vibrator is a piezoelectric element which has an amplitude amplification factor (Q) of 100 or more.
- the present invention can provide a drive device.
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
Description
y=−sin(ωt)−0.25·sin(2ωt) (1)
- Patent Document 1: JP 2633066
- Patent Document 2: JP 3171187
- Non-Patent Document 1: “Development of Smooth Impact Drive Mechanism (SIDM) (Part 2)”, Journal of the Japan Society for Precision Engineering, Vol. 68, No. 4 (2002), pp 536-541
| TABLE 1 | |||||
| DRIVE | CALCU- | ||||
| CONDITION | NAME | θ1 | θ2 | θ2′ | LATION |
| fd << | SAWTOOTH | 0 | 0 | 0 | =−0 − 2 · 0 | |
| VOLTAGE | ||||||
| SIDM | ||||||
| fd = 0.7fr1 | RECTANGULAR- | −20 | −130 | −90 | =−130 − 2 · | |
| WAVE | (−20) | |||||
| VOLTAGE | ||||||
| SIDM | ||||||
| fd = fr1 = | RESONANCE | −90 | −90 | 90 | =−90 − 2 · | |
| 0.5 · fr2 | SIDM | (−90) | ||||
fr=1/2π·√{square root over ((k/m))} (2)
y=−Q{sin(ωt)−0.25·sin(2ωt)} (3)
V1=−sin(2π·100k·t)
V2=−0.25*sin(2π·200k·t)
Claims (13)
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010023394 | 2010-02-04 | ||
| JP2010-023394 | 2010-02-04 | ||
| PCT/JP2011/000560 WO2011096199A1 (en) | 2010-02-04 | 2011-02-02 | Drive apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| US20120299442A1 US20120299442A1 (en) | 2012-11-29 |
| US9154055B2 true US9154055B2 (en) | 2015-10-06 |
Family
ID=44355216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/577,040 Expired - Fee Related US9154055B2 (en) | 2010-02-04 | 2011-02-02 | Drive device |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9154055B2 (en) |
| JP (1) | JP5767120B2 (en) |
| WO (1) | WO2011096199A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11716035B2 (en) | 2019-01-25 | 2023-08-01 | Physik Instrumente (Pi) Gmbh & Co. Kg | Electromechanical linear drive with transmission element |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180233856A1 (en) * | 2015-05-22 | 2018-08-16 | Rnd By Us B.V. | Holding device |
| WO2017082350A1 (en) * | 2015-11-10 | 2017-05-18 | 有限会社Uwave | Method for exciting longitudinal/torsional vibration of langevin-type ultrasonic vibrator |
| CN111566496B (en) * | 2017-11-23 | 2023-06-02 | 通泰克股份公司 | NMR Probes with Piezoelectric Actuators |
| CN113065089B (en) * | 2021-04-07 | 2022-06-07 | 中国水利水电科学研究院 | Method for calculating amplification ratio of resonance amplitude of underwater equipment |
| CN120825081B (en) * | 2025-09-15 | 2025-12-05 | 中国科学院长春光学精密机械与物理研究所 | Piezoelectric ceramic driving method based on delayed quasi-sawtooth wave signal |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4728843A (en) * | 1985-11-11 | 1988-03-01 | Taga Electric Co., Ltd. | Ultrasonic vibrator and drive control method thereof |
| US5225941A (en) | 1990-07-03 | 1993-07-06 | Canon Kabushiki Kaisha | Driving device |
| JP2633066B2 (en) | 1990-07-03 | 1997-07-23 | キヤノン株式会社 | Drive |
| JP2001119962A (en) | 1999-10-20 | 2001-04-27 | Minolta Co Ltd | Actuator using piezoelectric crystal element and drive method therefor |
| JP3171187B2 (en) | 1999-03-30 | 2001-05-28 | ミノルタ株式会社 | Piezo actuator |
| US20050242688A1 (en) | 2004-04-28 | 2005-11-03 | Konica Minolta Opto, Inc. | Driving device |
| US20050248234A1 (en) * | 2004-05-10 | 2005-11-10 | Takayuki Hoshino | Drive unit and information recording device |
| US7078847B2 (en) * | 1998-12-21 | 2006-07-18 | Seiko Epson Corporation | Piezoelectric actuator, timepiece, and portable device |
| US20070040471A1 (en) * | 2005-08-17 | 2007-02-22 | Nokia Corporation | Load adaptive class de driving amplifier for piezoelectric actuators |
| US20080019702A1 (en) | 2006-07-21 | 2008-01-24 | Konica Minolta Opto, Inc. | Laser optical device and control method of actuator |
| JP2008026609A (en) | 2006-07-21 | 2008-02-07 | Konica Minolta Opto Inc | Laser optical apparatus and method for controlling operation of actuator |
| US20080252173A1 (en) * | 2007-04-12 | 2008-10-16 | Ryuichi Yoshida | Drive unit |
| US20100296184A1 (en) * | 2009-05-19 | 2010-11-25 | Kazuhiro Shibatani | Vibratory driving device |
-
2011
- 2011-02-02 US US13/577,040 patent/US9154055B2/en not_active Expired - Fee Related
- 2011-02-02 WO PCT/JP2011/000560 patent/WO2011096199A1/en not_active Ceased
- 2011-02-02 JP JP2011552690A patent/JP5767120B2/en not_active Expired - Fee Related
Patent Citations (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4728843A (en) * | 1985-11-11 | 1988-03-01 | Taga Electric Co., Ltd. | Ultrasonic vibrator and drive control method thereof |
| US5225941A (en) | 1990-07-03 | 1993-07-06 | Canon Kabushiki Kaisha | Driving device |
| JP2633066B2 (en) | 1990-07-03 | 1997-07-23 | キヤノン株式会社 | Drive |
| US7078847B2 (en) * | 1998-12-21 | 2006-07-18 | Seiko Epson Corporation | Piezoelectric actuator, timepiece, and portable device |
| JP3171187B2 (en) | 1999-03-30 | 2001-05-28 | ミノルタ株式会社 | Piezo actuator |
| US6483226B1 (en) * | 1999-03-30 | 2002-11-19 | Minolta Co., Ltd. | Impact actuator and equipment using the impact actuator |
| JP2001119962A (en) | 1999-10-20 | 2001-04-27 | Minolta Co Ltd | Actuator using piezoelectric crystal element and drive method therefor |
| US7161277B2 (en) | 2004-04-28 | 2007-01-09 | Konica Minolta Opto, Inc. | Driving device |
| US20050242688A1 (en) | 2004-04-28 | 2005-11-03 | Konica Minolta Opto, Inc. | Driving device |
| JP2005318720A (en) | 2004-04-28 | 2005-11-10 | Konica Minolta Holdings Inc | Drive device |
| US20050248234A1 (en) * | 2004-05-10 | 2005-11-10 | Takayuki Hoshino | Drive unit and information recording device |
| US20070040471A1 (en) * | 2005-08-17 | 2007-02-22 | Nokia Corporation | Load adaptive class de driving amplifier for piezoelectric actuators |
| US20070081805A1 (en) * | 2005-08-17 | 2007-04-12 | Nokia Corporation | Combined actuator for camera shutter and focus functions |
| US20080019702A1 (en) | 2006-07-21 | 2008-01-24 | Konica Minolta Opto, Inc. | Laser optical device and control method of actuator |
| JP2008026609A (en) | 2006-07-21 | 2008-02-07 | Konica Minolta Opto Inc | Laser optical apparatus and method for controlling operation of actuator |
| US7941051B2 (en) | 2006-07-21 | 2011-05-10 | Konica Minolta Opto, Inc. | Laser optical device and control method of actuator |
| US20080252173A1 (en) * | 2007-04-12 | 2008-10-16 | Ryuichi Yoshida | Drive unit |
| US20100296184A1 (en) * | 2009-05-19 | 2010-11-25 | Kazuhiro Shibatani | Vibratory driving device |
Non-Patent Citations (2)
| Title |
|---|
| International Search Report for International application No. PCT/JP2011/000560 mailing date of Apr. 5, 2011 with English translation. |
| Ryuichi Yoshida et al., "Development of Smooth Impact Drive Mechanism (2nd Report)-Optimization of waveform of driving voltage-", Journal of the Japan Society for Precision Engineering, vol. 68, No. 4, 2002, p. 536-541. |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11716035B2 (en) | 2019-01-25 | 2023-08-01 | Physik Instrumente (Pi) Gmbh & Co. Kg | Electromechanical linear drive with transmission element |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2011096199A1 (en) | 2011-08-11 |
| JPWO2011096199A1 (en) | 2013-06-10 |
| US20120299442A1 (en) | 2012-11-29 |
| JP5767120B2 (en) | 2015-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9154055B2 (en) | Drive device | |
| Peng et al. | A review of long range piezoelectric motors using frequency leveraged method | |
| EP0674350B1 (en) | Ultrasonic motor | |
| US6707232B2 (en) | Piezoelectric driving body, ultrasonic motor and electronic apparatus having an ultrasonic motor | |
| US7915787B2 (en) | Actuator | |
| JP2012500503A5 (en) | ||
| JPH10507900A (en) | Piezoelectric motor | |
| Yang et al. | Miniaturization of a longitudinal–bending hybrid linear ultrasonic motor | |
| JP2009050146A (en) | Actuator | |
| Zhou et al. | Ring-shaped traveling wave ultrasonic motor for high-output power density with suspension stator | |
| Hachisuka et al. | Dynamic resonant frequency control system of ultrasonic transducer for non-sinusoidal waveform excitation | |
| JP3730467B2 (en) | Ultrasonic vibrator and composite vibration generating ultrasonic vibrator | |
| JPWO2007105632A1 (en) | Vibration actuator, lens barrel, camera system, vibrator | |
| CN1941596B (en) | Piezoelectric actuator, and apparatus and method for actuating the same | |
| JP5218045B2 (en) | Vibration actuator, lens barrel, camera system, and driving method of vibration actuator | |
| Bansevicius et al. | Multi-degree-of-freedom ultrasonic motors for mass-consumer devices | |
| US7321182B2 (en) | Oscillatory-wave actuator and method for driving oscillatory-wave actuator | |
| JP6497964B2 (en) | Vibrating actuator, lens barrel, camera, and control method | |
| JPH02188169A (en) | Ultrasonic motor | |
| JP2971971B2 (en) | Ultrasonic actuator | |
| JP2011182577A (en) | Drive circuit of actuator and ultrasonic linear actuator using the same | |
| JP2003164173A (en) | Drive unit | |
| JP2021027621A (en) | Vibration type motor control device and imaging device using the same | |
| JP2001119962A (en) | Actuator using piezoelectric crystal element and drive method therefor | |
| JP2013247800A (en) | Drive device for vibration wave motor, lens barrel, and camera |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment |
Owner name: KONICA MINOLTA ADVANCED LAYERS, INC., JAPAN Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:MORITA, TAKESHI;YOSHIDA, RYUICHI;SIGNING DATES FROM 20120713 TO 20120719;REEL/FRAME:028717/0901 Owner name: MORITA, TAKESHI, JAPAN Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:MORITA, TAKESHI;YOSHIDA, RYUICHI;SIGNING DATES FROM 20120713 TO 20120719;REEL/FRAME:028717/0901 |
|
| FEPP | Fee payment procedure |
Free format text: PAYOR NUMBER ASSIGNED (ORIGINAL EVENT CODE: ASPN); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY |
|
| AS | Assignment |
Owner name: KONICA MINOLTA, INC., JAPAN Free format text: MERGER;ASSIGNOR:KONICA MINOLTA ADVANCED LAYERS, INC.;REEL/FRAME:036098/0368 Effective date: 20130401 |
|
| STCF | Information on status: patent grant |
Free format text: PATENTED CASE |
|
| FEPP | Fee payment procedure |
Free format text: MAINTENANCE FEE REMINDER MAILED (ORIGINAL EVENT CODE: REM.); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY |
|
| LAPS | Lapse for failure to pay maintenance fees |
Free format text: PATENT EXPIRED FOR FAILURE TO PAY MAINTENANCE FEES (ORIGINAL EVENT CODE: EXP.); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY |
|
| STCH | Information on status: patent discontinuation |
Free format text: PATENT EXPIRED DUE TO NONPAYMENT OF MAINTENANCE FEES UNDER 37 CFR 1.362 |
|
| FP | Lapsed due to failure to pay maintenance fee |
Effective date: 20191006 |