KR20190105155A - 차량의 속도 설정 장치 및 방법 - Google Patents
차량의 속도 설정 장치 및 방법Info
- Publication number
- KR20190105155A KR20190105155A KR1020180019683A KR20180019683A KR20190105155A KR 20190105155 A KR20190105155 A KR 20190105155A KR 1020180019683 A KR1020180019683 A KR 1020180019683A KR 20180019683 A KR20180019683 A KR 20180019683A KR 20190105155 A KR20190105155 A KR 20190105155A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- processor
- driver
- speed
- camera
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 35
- 230000001133 acceleration Effects 0.000 claims description 22
- 238000004891 communication Methods 0.000 claims description 11
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 4
- 238000011161 development Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- G06K9/00798—
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0818—Inactivity or incapacity of driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/42—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/30—Auxiliary equipments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Abstract
본 발명의 일 실시 예에 따른 차량의 속도 설정 장치는 차량의 내부를 촬영하도록 배치된 제1 카메라, 차량의 외부를 촬영하도록 배치된 제2 카메라, 내비게이션 및 제1 카메라, 제2 카메라 및 내비게이션과 전기적으로 연결된 프로세서를 포함하고, 프로세서는 차량의 조향 장치에 대한 조작, 차량의 감속 장치에 대한 조작, 차량의 가속 장치에 대한 조작 또는 제1 카메라에 의해 획득된 영상 중 적어도 일부에 기초하여 차량의 운전자의 부주의를 감지하고, 운전자의 부주의가 감지되면, 제2 카메라에 의해 획득된 영상, 차량의 헤딩각, 차량의 속도, 차량의 요레이트, 차량의 주변 차량의 궤적 또는 내비게이션에 의해 획득된 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 도로의 차선과 연관된 정보 및 주변 차량과 연관된 정보 중 적어도 일부를 획득하고, 획득된 정보에 기초하여 감속 제어를 수행할 수 있다.
Description
본 발명은 차량의 목표 속도를 설정하기 위한 장치 및 방법에 관한 것이다.
자동차 산업의 발전에 따라 차량이 차로의 중앙에서 주행하도록 조향 장치를 자동으로 제어하는 차로 중앙 주행 보조 시스템의 개발이 이루어지고 있다. 차로 중앙 주행 보조 시스템은 자동 제어 조향 기능(automatically commanded steering function:ACSF)의 법규를 따라야 한다. 상술한 법규에 따르면, 운전자의 부주의 지속 또는 시스템의 한계 상황 시 시스템은 운전자에게 제어권 이양을 요청해야 하고, 제어권이 이양되지 않으면 시스템은 자체적으로 위험을 최소화하기 위한 전략을 수행해야 한다. 상기 전략 중 하나는 차량을 정차시키는 것이다.
위험을 최소화하기 위해 차량을 정차시킬 경우, 전방 충돌에 대한 위험은 감소하지만, 차량의 후방에 대한 추돌 위험은 증가할 수 있다. 따라서, 추돌 위험을 감소시킬 수 있는 전략의 개발이 요구된다.
본 발명은 차로 중앙 주행 보조 시스템에서 전방 충돌 및 후방 추돌 위험을 모두 감소시키는 전략을 수행할 수 있는 장치 및 방법을 제공하기 위한 것이다.
본 발명의 기술적 과제들은 이상에서 언급한 기술적 과제들로 제한되지 않으며, 언급되지 않은 또 다른 기술적 과제들은 아래의 기재들로부터 당업자에게 명확하게 이해될 수 있을 것이다.
본 발명의 일 실시 예에 따른 차량의 속도 설정 장치는 차량의 내부를 촬영하도록 배치된 제1 카메라, 차량의 외부를 촬영하도록 배치된 제2 카메라, 내비게이션 및 제1 카메라, 제2 카메라 및 내비게이션과 전기적으로 연결된 프로세서를 포함하고, 프로세서는 차량의 조향 장치에 대한 조작, 차량의 감속 장치에 대한 조작, 차량의 가속 장치에 대한 조작 또는 제1 카메라에 의해 획득된 영상 중 적어도 일부에 기초하여 차량의 운전자의 부주의를 감지하고, 운전자의 부주의가 감지되면, 제2 카메라에 의해 획득된 영상, 차량의 헤딩각, 차량의 속도, 차량의 요레이트, 차량의 주변 차량의 궤적 또는 내비게이션에 의해 획득된 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 도로의 차선과 연관된 정보 및 주변 차량과 연관된 정보 중 적어도 일부를 획득하고, 획득된 정보에 기초하여 감속 제어를 수행할 수 있다.
일 실시 예에 따르면, 프로세서는 제1 시간 구간 동안 조향 장치에 대한 운전자의 조작이 없고, 제2 시간 구간 동안 감속 장치 또는 가속 장치에 대한 운전자의 조작이 없고, 제1 카메라에 의해 촬영된 영상에 기초하여 운전자가 차량의 전방을 주시하지 않는 것으로 판단되면, 운전자의 부주의를 감지할 수 있다.
일 실시 예에 따르면, 프로세서는 운전자의 부주의가 감지된 후, 차선이 인식되면, 감속 제어의 목표 속도를 지정된 속도로 설정할 수 있다.
일 실시 예에 따르면, 프로세서는 운전자의 부주의가 감지된 후, 차선 및 주변 차량이 미인식되면, 운전자의 부주의가 감지되기 이전에 인식된 차선, 차량의 헤딩각, 차량의 속도, 차량의 요레이트 및 내비게이션으로부터 수신된 도로의 곡률에 기초하여 감속 제어를 수행할 수 있다.
일 실시 예에 따르면, 프로세서는 운전자의 부주의가 감지되기 이전에 인식된 차선, 차량의 헤딩각, 차량의 속도, 차량의 요레이트 및 도로의 곡률에 기초하여 인식된 차선으로부터의 이탈 예상 시간을 산출하고, 이탈 예상 시간에 기초하여 감속 제어를 수행할 수 있다.
일 실시 예에 따르면, 프로세서는 이탈 예상 시간 및 미리 설정된 파라미터에 기초하여 감속 제어의 목표 속도를 설정할 수 있다.
일 실시 예에 따르면, 프로세서는 운전자의 부주의가 감지된 후, 차선이 미인식되고 주변 차량이 인식되면, 주변 차량의 이동 궤적과 내비게이션으로부터 수신된 도로의 곡률을 비교하고, 비교 결과에 기초하여 감속 제어를 수행할 수 있다.
일 실시 예에 따르면, 프로세서는 주변 차량의 이동 궤적과 도로의 곡률 사이의 유클리디안 거리를 산출하고, 유클리디안 거리에 기초하여 감속 제어를 수행할 수 있다.
일 실시 예에 따르면, 프로세서는 비교 결과 및 미리 설정된 파라미터에 기초하여 감속 제어의 목표 속도를 설정할 수 있다.
일 실시 예에 따르면, 프로세서는 차량의 후방 차량의 가속도에 기초하여 감속 제어의 목표 속도를 변경할 수 있다.
일 실시 예에 따르면, 프로세서는 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 감속 제어의 목표 속도를 변경할 수 있다.
일 실시 예에 따르면, 장치는 외부 장치와 통신하는 통신 회로를 더 포함하고, 프로세서는 감속 제어가 수행되면, 통신 회로를 이용하여 자동적으로 긴급 통보를 발신할 수 있다.
일 실시 예에 따르면, 프로세서는 차량의 후방 차량의 가속도 또는 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 감속 제어의 목표 속도를 변경하고, 변경 전 목표 속도 및 변경된 목표 속도에 기초하여 긴급 통보의 발신 여부를 결정할 수 있다.
본 발명의 일 실시 예에 따른 차량의 속도 설정 방법은 차량의 조향 장치에 대한 조작, 차량의 감속 장치에 대한 조작, 차량의 가속 장치에 대한 조작 또는 차량의 내부를 촬영하는 카메라에 의해 촬영된 영상 중 적어도 일부에 기초하여 차량의 운전자의 부주의를 감지하는 단계, 운전자의 부주의가 감지되면, 차량의 외부를 촬영하는 카메라에 의해 획득된 영상, 차량의 헤딩각, 차량의 속도, 차량의 요레이트, 차량의 주변 차량의 궤적 또는 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 도로의 차선과 연관된 정보 및 주변 차량과 연관된 정보 중 적어도 일부를 획득하는 단계 및 획득된 정보에 기초하여 감속 제어를 수행하는 단계를 포함할 수 있다.
본 발명의 일 실시 예에 따른 차량의 속도 설정 장치는 차량의 주행 상황에 따라 차량의 차선 이탈 예상 시간 또는 주변 차량의 이동 궤적과 도로의 곡률 사이의 유사도에 기초하여 전방 충돌 및 후방 추돌 위험성을 감소시키는 차량의 목표 속도를 설정할 수 있다.
이 외에, 본 문서를 통해 직접적 또는 간접적으로 파악되는 다양한 효과들이 제공될 수 있다.
도 1은 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 구성을 나타내는 블록도이다.
도 2는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치에 포함된 프로그램 모듈의 구성을 나타내는 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 6은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 7은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 8은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 9는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.
도 2는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치에 포함된 프로그램 모듈의 구성을 나타내는 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 6은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 7은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 8은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 9는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.
이하, 본 발명의 일부 실시 예들을 예시적인 도면을 통해 상세하게 설명한다. 각 도면의 구성요소들에 참조부호를 부가함에 있어서, 동일한 구성요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명의 실시 예를 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 실시 예에 대한 이해를 방해한다고 판단되는 경우에는 그 상세한 설명은 생략한다.
본 발명의 실시 예의 구성 요소를 설명하는 데 있어서, 제 1, 제 2, A, B, (a), (b) 등의 용어를 사용할 수 있다. 이러한 용어는 그 구성 요소를 다른 구성 요소와 구별하기 위한 것일 뿐, 그 용어에 의해 해당 구성 요소의 본질이나 차례 또는 순서 등이 한정되지 않는다. 또한, 다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가진다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 가진 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
도 1은 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 구성을 나타내는 블록도이다.
도 1을 참조하면, 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치(100)(이하, 설명의 편의를 위해 “장치(100)”라 한다.)는 제1 카메라(110), 제2 카메라(120), 내비게이션(130), 통신 회로(140), 조향 장치(150), 감속 장치(160), 가속 장치(170), 센싱 모듈(180) 및 프로세서(190)를 포함할 수 있다. 장치(100)는 차량에 탑재될 수 있다.
제1 카메라(110)는 차량의 내부를 촬영하도록 배치될 수 있다. 제1 카메라(110)는, 예를 들어, 차량에 탑승한 운전자의 안면을 촬영할 수 있다.
제2 카메라(120)는 차량의 외부를 촬영하도록 배치될 수 있다. 제2 카메라(120)는, 예를 들어, 차량이 주행 중인 도로의 차선을 촬영할 수 있고, 주변 차량을 촬영할 수도 있다.
내비게이션(130)은 차량의 현재 위치로부터 목적지까지의 경로를 안내할 수 있다. 내비게이션(130)은 지도 정보를 저장할 수 있고, 지도 정보를 이용하여 경로를 안내할 수 있다. 내비게이션(130)은 차량이 주행 중인 도로의 곡률에 대한 정보를 제공할 수 있다.
통신 회로(140)는 외부 장치와 통신하도록 구성될 수 있다. 통신 회로(140)는, 예를 들어, 외부 장치로 긴급 통보를 전송할 수 있다.
가속 장치(170)는 차량의 속도를 높일 수 있는 엔진 및 가속 페달 등을 포함할 수 있다.
감속 장치(160)는 차량의 속도를 낮출 수 있는 제동 장치 및 감속 페달 등을 포함할 수 있다.
조향 장치(150)는 차량의 조향각을 조절할 수 있는 조향 휠, 조향 축, 조향 기어 및 링크 등을 포함할 수 있다.
센싱 모듈(180)은 차량 및 주변 차량에 대한 정보를 감지하도록 구성될 수 있다. 센싱 모듈(180)은 차량 및 주변 차량의 위치, 속도 및 가속도 등과 같은 다양한 정보를 감지할 수 있다. 센싱 모듈(180)은, 예를 들어, 레이더, 라이다, 가속도 센서, 요레이트 센서, 토크 측정 센서 및/또는 휠스피드 센서 등을 포함할 수 있다.
프로세서(190)는 제1 카메라(110), 제2 카메라(120), 내비게이션(130), 통신 회로(140), 조향 장치(150), 감속 장치(160), 가속 장치(170) 및 센싱 모듈(180)과 전기적으로 연결될 수 있다. 프로세서(190)는 제1 카메라(110), 제2 카메라(120), 내비게이션(130), 통신 회로(140), 조향 장치(150), 감속 장치(160), 가속 장치(170) 및 센싱 모듈(180)을 제어할 수 있고, 다양한 데이터 처리 및 연산을 수행할 수 있다.
일 실시 예에 따르면, 프로세서(190)는 차량의 조향 장치(150)에 대한 조작, 차량의 감속 장치(160)에 대한 조작, 차량의 가속 장치(170)에 대한 조작 또는 제1 카메라(110)에 의해 획득된 영상 중 적어도 일부에 기초하여 차량의 운전자의 부주의를 감지할 수 있다. 예를 들어, 프로세서(190)는 제1 시간 구간 동안 조향 장치(150)에 대한 운전자의 조작이 없고, 제2 시간 구간 동안 감속 장치(160) 또는 가속 장치(170)에 대한 운전자의 조작이 없고, 제1 카메라(110)에 의해 촬영된 영상에 기초하여 운전자가 차량의 전방을 주시하지 않는 것으로 판단되면, 운전자의 부주의를 감지할 수 있다. 프로세서(190)는 조향 장치(150)와 연결된 토크 측정 센서를 이용하여 조향 장치(150)에 대한 운전자의 개입을 감지할 수 있다. 프로세서(190)는 감속 페달 또는 가속 페달과 연결된 센서 또는 스위치를 이용하여 감속 장치(160) 또는 가속 장치(170)에 대한 운전자의 개입을 판단할 수 있다. 프로세서(190)는 제1 카메라(110)에 의해 획득된 영상을 분석함으로써 운전자가 전방을 주시하는지 여부를 판단할 수 있다.
일 실시 예에 따르면, 프로세서(190)는 운전자의 부주의가 감지되면, 제2 카메라(120)에 의해 획득된 영상, 차량의 헤딩각, 차량의 속도, 차량의 요레이트, 차량의 주변 차량의 궤적 또는 내비게이션(130)에 의해 획득된 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 도로의 차선과 연관된 정보 및 주변 차량과 연관된 정보 중 적어도 일부를 획득하고, 획득된 정보에 기초하여 감속 제어를 수행할 수 있다. 프로세서(190)는 운전자의 부주의가 감지될 때 차선의 인식 여부 및 주변 차량의 인식 여부 등에 기초하여 다양한 전략으로 감속 제어를 수행할 수 있다.
일 실시 예에 따르면, 프로세서(190)는 운전자의 부주의가 감지된 후, 차선이 인식되면, 감속 제어의 목표 속도를 지정된 속도로 설정할 수 있다. 프로세서(190)는 차선이 인식되는 경우에는 차로 중앙 주행 보조 시스템이 정상적으로 동작 가능하므로, 과도한 감속 제어를 수행하지 않고, 차량을 지정된 속도로 감속시킬 수 있다.
일 실시 예에 따르면, 프로세서(190)는 운전자의 부주의가 감지된 후, 차선 및 주변 차량이 미인식되면, 운전자의 부주의가 감지되기 이전에 인식된 차선, 차량의 헤딩각, 차량의 속도, 차량의 요레이트 및 내비게이션(130)으로부터 수신된 도로의 곡률에 기초하여 감속 제어를 수행할 수 있다. 예를 들어, 프로세서(190)는 운전자의 부주의가 감지되기 이전에 인식된 차선, 차량의 헤딩각, 차량의 속도, 차량의 요레이트 및 도로의 곡률에 기초하여 인식된 차선으로부터의 이탈 예상 시간을 산출하고, 이탈 예상 시간에 기초하여 감속 제어를 수행할 수 있다. 프로세서(190)는, 예를 들어, 제1 카메라(110)에 의해 획득된 이미지를 분석함으로써 운전자의 부주의가 감지되기 이전에 인식된 좌측 차선의 이탈까지 남은 횡거리(dl), 운전자의 부주의가 감지되기 이전에 인식된 우측 차선의 이탈까지 남은 횡거리(dr) 및 차량의 헤딩각(θ)에 대한 정보를 획득할 수 있다. 프로세서(190)는, 예를 들어, 휠 스피드 센서를 이용하여 차량의 속도(V)에 대한 정보를 획득할 수 있다. 프로세서(190)는, 예를 들어, 요레이트 센서를 이용하여 차량의 요레이트(γ)에 대한 정보를 획득할 수 있다. 프로세서(190)는 내비게이션(130)을 이용하여 차량이 주행 중인 도로의 곡률(ρ)에 대한 정보를 획득할 수 있다. 프로세서(190)는 획득된 정보에 기초하여 이탈 예상 시간을 산출할 수 있다. 이탈 예상 시간을 산출하기 위한 예시적인 수학식은 다음과 같다.

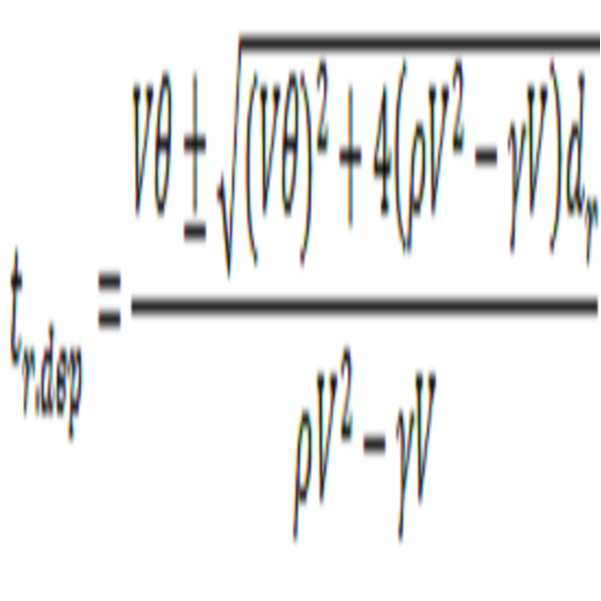
여기서, dl,mar은 t 초 후 좌측 차선까지 남은 횡거리이고 dr,mar은 t 초 후 우측 차선 까지 남은 횡거리이고 tl,dep는 좌측 차선에 대한 이탈 예상 시간이고, tr,dep는 우측 차선에 대한 이탈 예상 시간이고, tmin,dep는 이탈 예상 시간이다.
일 실시 예에 따르면, 프로세서(190)는 이탈 예상 시간 및 미리 설정된 파라미터에 기초하여 감속 제어의 목표 속도를 설정할 수 있다. 프로세서(190)는 이탈 예상 시간이 짧아질수록 목표 속도를 더 낮게 설정할 수 있다.
일 실시 예에 따르면, 프로세서(190)는 운전자의 부주의가 감지된 후, 차선이 미인식되고 주변 차량이 인식되면, 주변 차량의 이동 궤적과 내비게이션(130)으로부터 수신된 도로의 곡률을 비교하고, 비교 결과에 기초하여 감속 제어를 수행할 수 있다. 예를 들어, 프로세서(190)는 주변 차량의 이동 궤적과 도로의 곡률 사이의 유클리디안 거리를 산출하고, 유클리디안 거리에 기초하여 감속 제어를 수행할 수 있다. 프로세서(190)는, 예를 들어, 제2 카메라(120)에 의해 획득된 영상을 분석하거나 레이더 또는 라이다 등을 이용하여 주변 차량의 이동 궤적의 곡률(ρveh)을 획득할 수 있다. 프로세서(190)는, 예를 들어, 내비게이션(130)을 이용하여 차량이 주행 중인 도로의 곡률(ρnavi)에 대한 정보를 획득할 수 있다. 프로세서(190)는 상술한 정보를 지속적으로 획득할 수 있고, 획득된 복수의 샘플에 기초하여 주변 차량의 이동 궤적과 도로의 곡률 사이의 유클리디안 거리(σcur)를 산출할 수 있다. 유클리디안 거리(σcur)를 산출하기 위한 예시적인 수학식은 다음과 같다.
일 실시 예에 따르면, 프로세서(190)는 비교 결과 및 미리 설정된 파라미터에 기초하여 감속 제어의 목표 속도를 설정할 수 있다. 프로세서(190)는 유클리디안 거리가 멀수록 목표 속도를 더 낮게 설정할 수 있다.
일 실시 예에 따르면, 프로세서(190)는 차량의 후방 차량의 가속도에 기초하여 감속 제어의 목표 속도를 변경할 수 있다. 프로세서(190)는 후방 추돌 위험 상황이 반복되면 목표 속도를 증가시킴으로써 추돌 위험을 감소시킬 수 있다. 프로세서(190)는 후방 차량의 가속도의 절대값이 클수록(후방 차량이 급감속하면) 목표 속도를 더 높게 설정할 수 있다.
일 실시 예에 따르면, 프로세서(190)는 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 감속 제어의 목표 속도를 변경할 수 있다. 프로세서(190)는 차량과 주변 차량 사이의 상대 속도가 크면 목표 속도가 주변 교통 흐름과 부합하도록 목표 속도를 증가시킬 수 있다. 프로세서(190)는 상대 속도가 클수록 목표 속도를 더 높게 설정할 수 있다.
일 실시 예에 따르면, 장치(100)는 외부 장치와 통신하는 통신 회로(140)를 더 포함하고, 프로세서(190)는 감속 제어가 수행되면, 통신 회로(140)를 이용하여 자동적으로 외부 장치로 긴급 통보를 발신할 수 있다. 일 실시 예에 따르면, 프로세서(190)는 차량의 후방 차량의 가속도 또는 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 감속 제어의 목표 속도를 변경하고, 변경 전 목표 속도 및 변경된 목표 속도에 기초하여 긴급 통보의 발신 여부를 결정할 수 있다. 정체 상황에서는 운전자가 의도적으로 부주의 판단 조건을 모두 만족하면서 주행할 수도 있다. 이 경우, 불필요한 긴급 통보가 발신되고, 운전자의 불만과 불필요한 비용 발생을 초래할 수 있다. 따라서, 프로세서(190)는 목표 속도의 변경이 지속적으로 발생된 경우 긴급 통보를 발신할 수 있다.
도 2는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치에 포함된 프로그램 모듈의 구성을 나타내는 블록도이다.
도 2를 참조하면, 일 실시 예에 따른 프로그램 모듈은 운전자 부주의 판단부(210), 시스템 한계 상황 판단부(220), 목표 속도 설정부(230), 목표 속도 조정부(240) 및 긴급 통보 발신 여부 판단부(250)를 포함할 수 있다. 프로그램 모듈은 도 1의 장치(100)의 메모리에 저장될 수 있다.
운전자 부주의 판단부(210)는 운전자의 조향 개입, 가속 페달 조작, 감속 페달 조작 및 전방 주시 여부 등을 기준으로 운전자의 부주의를 판단할 수 있다.
시스템 한계 상황 판단부(220)는 차로 중앙 주행 보조 시스템의 한계 상황에서(예: 운전자의 부주의가 감지되고 차선이 인식되지 않는 경우), 차량의 주행 환경에 따라 차선으로부터의 이탈 예상 시간(tmin,dep) 및 주변 차량의 이동 궤적과 도로의 곡률 사이의 유클리디안 거리(σcur)를 산출할 수 있다.
목표 속도 설정부(230)는 시스템 한계 상황에서 차량의 감속 제어를 위한 목표 속도(Vset,t)를 설정할 수 있다. 목표 속도 설정부(230)는 운전자 부주의 판단부(210)에 의해 운전자의 부주의가 감지된 경우, 시스템 한계 상황 판단부(220)에 의해 산출된 이탈 예상 시간 및 유클리디안 거리에 기초하여 목표 속도를 산출할 수 있다. 목표 속도 설정부(230)의 동작에 대해서는 도 6을 참조하여 상세히 설명한다.
목표 속도 조정부(240)는 주변 차량의 주행을 고려하여 목표 속도를 조정할 수 있다. 목표 속도 조정부(240)는 후방 차량의 가속도 및 측방 차량의 상대 속도 등에 기초하여 조정된 목표 속도(Vfinal _ set,t)를 산출할 수 있다. 목표 속도 조정부(240)의 동작에 대해서는 도 7 및 도 8을 참조하여 상세히 설명한다.
긴급 통보 발신 여부 판단부(250)는 목표 속도의 조정에 따라 긴급 통보의 발신 여부를 결정하는 플래그(Flagcall)를 변경할 수 있다. 긴급 통보 발신 여부 판단부(250)의 동작에 대해서는 도 9를 참조하여 상세히 설명한다.
도 3은 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 3을 참조하면, 일 실시 예에 따른 차량(310)은 도로를 따라 주행할 수 있다. 예를 들어, 차량(310)은 제1 차선(320) 및 제2 차선(330)이 인식되지 않는 상황에서 운전자의 부주의를 감지할 수 있다. 또한, 도로 상에 차량(310)과 인접한 주변 차량(310)이 없을 수 있다. 이 경우, 차량(310)은 부주의가 감지되기 이전에 지점(p)에서 획득된 영상을 분석함으로써 제1 차선(320)의 이탈까지 남은 횡거리, 제2 차선(330)의 이탈까지 남은 횡거리 및 차량(310)의 헤딩각에 대한 정보를 획득할 수 있다. 차량(310)은 차량(310)의 속도, 차량(310)의 요레이트 및 도로의 곡률에 대한 정보를 추가적으로 획득할 수 있다. 차량(310)은 획득된 정보에 기초하여 이탈 예상 시간을 산출할 수 있다. 차량(310)은 이탈 예상 시간에 기초하여 감속 제어를 위한 목표 속도를 산출할 수 있고, 감속 제어를 수행할 수 있다.
도 4는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 4를 참조하면, 일 실시 예에 따른 차량(410)은 도로를 따라 주행할 수 있다. 예를 들어, 차량(410)은 제1 차선(420) 및 제2 차선(430)이 인식되지 않는 상황에서 운전자의 부주의를 감지할 수 있다. 또한, 도로 상에 차량(410)과 인접한 주변 차량(440)이 감지될 수 있다. 이 경우, 차량(410)은 카메라, 레이더 및/또는 라이더 등을 이용하여 주변 차량(440)의 이동 궤적(L)을 획득할 수 있고, 내비게이션을 이용하여 주행 중인 도로의 곡률을 획득할 수 있다. 차량(410)은 획득된 정보에 기초하여 이동 궤적의 곡률과 도로의 곡률 사이의 유사도를 산출할 수 있다. 차량(410)은 유사도에 기초하여 감속 제어를 위한 목표 속도를 산출할 수 있고, 감속 제어를 수행할 수 있다.
도 5는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
이하에서는 도 1의 장치(100)가 도 5의 프로세스를 수행하는 것을 가정한다. 또한, 도 5의 설명에서, 장치에 의해 수행되는 것으로 기술된 동작은 장치(100)의 프로세서(190)에 의해 제어되는 것으로 이해될 수 있다.
도 5를 참조하면, 단계 510에서, 장치는 차량의 조향 장치에 대한 조작, 차량의 감속 장치에 대한 조작, 차량의 가속 장치에 대한 조작 또는 차량의 내부를 촬영하는 카메라에 의해 촬영된 영상 중 적어도 일부에 기초하여 차량의 운전자의 부주의가 감지되는지 여부를 판단할 수 있다. 예를 들어, 장치는 지정된 시간 동안 조향 장치의 조작, 감속 장치의 조작 및 가속 장치의 조작이 없고 운전자가 차량의 전방을 주시하지 않는 것으로 판단되면, 운전자의 부주의를 감지할 수 있다.
단계 520에서, 장치는 차량의 외부를 촬영하는 카메라에 의해 획득된 영상, 차량의 헤딩각, 차량의 속도, 차량의 요레이트, 차량의 주변 차량의 궤적 또는 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 도로의 차선과 연관된 정보 및 주변 차량과 연관된 정보 중 적어도 일부를 획득할 수 있다. 예를 들어, 차량은 운전자의 부주의가 감지되고 차선이 인식되지 않으면 상술한 정보를 획득할 수 있다.
단계 530에서, 장치는 획득된 정보에 기초하여 감속 제어를 수행할 수 있다. 예를 들어, 장치는 차량의 차선 이탈 예상 시간 또는 주변 차량의 이동 궤적의 곡률과 도로의 곡률 사이의 유사도에 기초하여 목표 속도를 설정하고, 감속 제어를 수행할 수 있다.
도 6은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
이하에서는 도 1의 장치(100)가 도 6의 프로세스를 수행하는 것을 가정한다. 또한, 도 6의 설명에서, 장치에 의해 수행되는 것으로 기술된 동작은 장치(100)의 프로세서(190)에 의해 제어되는 것으로 이해될 수 있다.
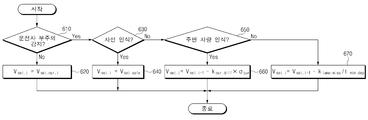
도 6을 참조하면, 단계 610에서, 장치는 운전자의 부주의가 감지되는지 여부를 판단할 수 있다. 운전자의 부주의가 감지되지 않으면, 단계 620에서, 장치는 현재 목표 속도(Vset.cur.t)를 유지할 수 있다.
운전자의 부주의가 감지되면, 단계 630에서, 장치는 차선이 인식되는지 여부를 판단할 수 있다. 차선이 인식되면, 단계 640에서, 장치는 목표 속도(Vset .t)를 지정된 속도(Vset.safe)로 설정할 수 있다.
차선이 인식되지 않으면, 단계 650에서, 장치는 주변 차량이 인식되는지 여부를 판단할 수 있다. 주변 차량이 인식되면, 단계 660에서, 장치는 이전 목표 속도(Vset.t-1), 주변 차량 인식 시 적용되는 파라미터(kcur . diff) 및 주변 차량의 이동 궤적의 곡률과 도로의 곡률 사이의 유클리디언 거리(σcur)에 기초하여 도 6에 도시된 수식에 따라 목표 속도(Vset .t)를 설정할 수 있다. 주변 차량이 인식되지 않으면, 단계 670에서, 장치는 이전 목표 속도(Vset .t-1), 주변 차량 미인식 시 적용되는 파라미터(klane.miss) 및 차선 이탈 예상 시간(tmin .dep)에 기초하여 도 6에 도시된 수식에 따라 목표 속도(Vset.t)를 설정할 수 있다.
도 7은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
이하에서는 도 1의 장치(100)가 도 7의 프로세스를 수행하는 것을 가정한다. 또한, 도 7의 설명에서, 장치에 의해 수행되는 것으로 기술된 동작은 장치(100)의 프로세서(190)에 의해 제어되는 것으로 이해될 수 있다.
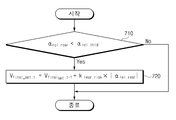
도 7을 참조하면, 단계 710에서, 장치는 후방 차량의 가속도(arel .rear)가 지정된 값(arel . thld)보다 작은지 여부를 판단할 수 있다. 후방 차량의 가속도가 지정된 값보다 작은 경우, 단계 720에서, 장치는 후방 추돌의 위험도가 높다고 판단하고, 이전 목표 속도(Vfinal _set.t-1), 목표 속도 조정을 위한 파라미터(krear .risk) 및 후방 차량의 가속도(arel .rear)에 기초하여 조정된 목표 속도(Vfinal _set.t)를 산출할 수 있다. 후방 차량의 가속도가 지정된 값보다 큰 경우, 장치는 후방 추돌의 위험도가 낮다고 판단하고, 목표 속도를 조정하지 않을 수 있다.
도 8은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
이하에서는 도 1의 장치(100)가 도 8의 프로세스를 수행하는 것을 가정한다. 또한, 도 8의 설명에서, 장치에 의해 수행되는 것으로 기술된 동작은 장치(100)의 프로세서(190)에 의해 제어되는 것으로 이해될 수 있다.
도 8을 참조하면, 단계 810에서, 장치는 후측방 차량의 상대 속도(Vrel.rear_side)가 지정된 값(Vrel . thld)보다 큰지 여부를 판단할 수 있다. 후측방 차량의 상대 속도가 지정된 값보다 큰 경우, 단계 820에서, 장치는 교통 흐름에 따른 위험도가 높다고 판단하고, 이전 목표 속도(Vfinal _set.t-1), 목표 속도 조정을 위한 파라미터(krear_side.risk) 및 후측방 차량의 상대 속도(Vrel .rear_side)에 기초하여 조정된 목표 속도(Vfinal _set.t)를 산출할 수 있다. 후측방 차량의 상대 속도가 지정된 값보다 큰 경우, 장치는 교통 흐름에 따른 위험도가 낮다고 판단하고, 목표 속도를 조정하지 않을 수 있다.
도 9는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
이하에서는 도 1의 장치(100)가 도 9의 프로세스를 수행하는 것을 가정한다. 또한, 도 9의 설명에서, 장치에 의해 수행되는 것으로 기술된 동작은 장치(100)의 프로세서(190)에 의해 제어되는 것으로 이해될 수 있다.
도 9를 참조하면, 단계 910에서, 장치는 조정된 목표 속도(Vfinal _set.t)(예: 목표 속도 조정부(240)에 의해 조정된 목표 속도)와 조정 전 목표 속도(Vset .t)(예: 목표 속도 설정부(230)에 의해 설정된 목표 속도)의 차이가 지정된 값(Vrel .call_ thld)보다 큰지 여부를 판단할 수 있다.
조정된 목표 속도와 조정 전 목표 속도의 차이가 지정된 값보다 큰 경우, 단계 920에서, 장치는 긴급 통보를 위한 카운터(Cnt)를 증가시킬 수 있다. 조정된 목표 속도와 조정 전 목표 속도의 차이가 지정된 값보다 작은 경우, 단계 930에서, 장치는 카운터(Cnt)를 초기화할 수 있다.
카운터가 증가되면, 단계 940에서, 장치는 긴급 통보를 위한 카운터(Cntt)가 지정된 값(Cntthld)보다 큰지 여부를 판단할 수 있다.
긴급 통보를 위한 카운터가 지정된 값보다 크면, 장치는 긴급 통보를 위한 플래그(Flagcall)를 1로 설정하고, 긴급 통보를 발신할 수 있다. 카운터가 초기화되거나 긴급 통보를 위한 카운터가 지정된 값보다 작으면, 장치는 플래그(Flagcall)를 0으로 설정하고, 긴급 통보를 발신하지 않을 수 있다.
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.
도 10을 참조하면, 상술한 본 발명의 일 실시 예에 따른 방법은 컴퓨팅 시스템을 통해서도 구현될 수 있다. 컴퓨팅 시스템(1000)은 시스템 버스(1200)를 통해 연결되는 적어도 하나의 프로세서(1100), 메모리(1300), 사용자 인터페이스 입력 장치(1400), 사용자 인터페이스 출력 장치(1500), 스토리지(1600), 및 네트워크 인터페이스(1700)를 포함할 수 있다.
프로세서(1100)는 중앙 처리 장치(CPU) 또는 메모리(1300) 및/또는 스토리지(1600)에 저장된 명령어들에 대한 처리를 실행하는 반도체 장치일 수 있다. 메모리(1300) 및 스토리지(1600)는 다양한 종류의 휘발성 또는 불휘발성 저장 매체를 포함할 수 있다. 예를 들어, 메모리(1300)는 ROM(Read Only Memory) 및 RAM(Random Access Memory)을 포함할 수 있다.
따라서, 본 명세서에 개시된 실시 예들과 관련하여 설명된 방법 또는 알고리즘의 단계는 프로세서(1100)에 의해 실행되는 하드웨어, 소프트웨어 모듈, 또는 그 2 개의 결합으로 직접 구현될 수 있다. 소프트웨어 모듈은 RAM 메모리, 플래시 메모리, ROM 메모리, EPROM 메모리, EEPROM 메모리, 레지스터, 하드 디스크, 착탈형 디스크, CD-ROM과 같은 저장 매체(즉, 메모리(1300) 및/또는 스토리지(1600))에 상주할 수도 있다. 예시적인 저장 매체는 프로세서(1100)에 커플링되며, 그 프로세서(1100)는 저장 매체로부터 정보를 판독할 수 있고 저장 매체에 정보를 기입할 수 있다. 다른 방법으로, 저장 매체는 프로세서(1100)와 일체형일 수도 있다. 프로세서 및 저장 매체는 주문형 집적회로(ASIC) 내에 상주할 수도 있다. ASIC는 사용자 단말기 내에 상주할 수도 있다. 다른 방법으로, 프로세서 및 저장 매체는 사용자 단말기 내에 개별 컴포넌트로서 상주할 수도 있다.
이상의 설명은 본 발명의 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 다양한 수정 및 변형이 가능할 것이다.
따라서, 본 발명에 개시된 실시 예들은 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시 예에 의하여 본 발명의 기술 사상의 범위가 한정되는 것은 아니다. 본 발명의 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술 사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 할 것이다.
Claims (14)
- 차량의 속도 설정 장치에 있어서,
상기 차량의 내부를 촬영하도록 배치된 제1 카메라;
상기 차량의 외부를 촬영하도록 배치된 제2 카메라;
내비게이션; 및
상기 제1 카메라, 상기 제2 카메라 및 상기 내비게이션과 전기적으로 연결된 프로세서를 포함하고,
상기 프로세서는,
상기 차량의 조향 장치에 대한 조작, 상기 차량의 감속 장치에 대한 조작, 상기 차량의 가속 장치에 대한 조작 또는 상기 제1 카메라에 의해 획득된 영상 중 적어도 일부에 기초하여 상기 차량의 운전자의 부주의를 감지하고,
상기 운전자의 부주의가 감지되면, 상기 제2 카메라에 의해 획득된 영상, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트, 상기 차량의 주변 차량의 궤적 또는 상기 내비게이션에 의해 획득된 상기 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 상기 도로의 차선과 연관된 정보 및 상기 주변 차량과 연관된 정보 중 적어도 일부를 획득하고,
상기 획득된 정보에 기초하여 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
제1 시간 구간 동안 상기 조향 장치에 대한 상기 운전자의 조작이 없고, 제2 시간 구간 동안 상기 감속 장치 또는 상기 가속 장치에 대한 상기 운전자의 조작이 없고, 상기 제1 카메라에 의해 촬영된 영상에 기초하여 상기 운전자가 상기 차량의 전방을 주시하지 않는 것으로 판단되면, 상기 운전자의 부주의를 감지하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 운전자의 부주의가 감지된 후, 상기 차선이 인식되면, 상기 감속 제어의 목표 속도를 지정된 속도로 설정하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 운전자의 부주의가 감지된 후, 상기 차선 및 상기 주변 차량이 미인식되면, 상기 운전자의 부주의가 감지되기 이전에 인식된 차선, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트 및 상기 내비게이션으로부터 수신된 상기 도로의 곡률에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 4 항에 있어서,
상기 프로세서는,
상기 운전자의 부주의가 감지되기 이전에 인식된 차선, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트 및 상기 도로의 곡률에 기초하여 상기 인식된 차선으로부터의 이탈 예상 시간을 산출하고,
상기 이탈 예상 시간에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 5 항에 있어서,
상기 프로세서는,
상기 이탈 예상 시간 및 미리 설정된 파라미터에 기초하여 상기 감속 제어의 목표 속도를 설정하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 운전자의 부주의가 감지된 후, 상기 차선이 미인식되고 상기 주변 차량이 인식되면, 상기 주변 차량의 이동 궤적과 상기 내비게이션으로부터 수신된 상기 도로의 곡률을 비교하고,
상기 비교 결과에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 7 항에 있어서,
상기 프로세서는,
상기 주변 차량의 이동 궤적과 상기 도로의 곡률 사이의 유클리디안 거리를 산출하고,
상기 유클리디안 거리에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 7 항에 있어서,
상기 프로세서는,
상기 비교 결과 및 미리 설정된 파라미터에 기초하여 상기 감속 제어의 목표 속도를 설정하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 차량의 후방 차량의 가속도에 기초하여 상기 감속 제어의 목표 속도를 변경하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 상기 감속 제어의 목표 속도를 변경하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
외부 장치와 통신하는 통신 회로를 더 포함하고,
상기 프로세서는,
상기 감속 제어가 수행되면, 상기 통신 회로를 이용하여 자동적으로 긴급 통보를 발신하는 것을 특징으로 하는, 장치. - 제 12 항에 있어서,
상기 프로세서는,
상기 차량의 후방 차량의 가속도 또는 상기 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 상기 감속 제어의 목표 속도를 변경하고,
상기 변경 전 목표 속도 및 상기 변경된 목표 속도에 기초하여 상기 긴급 통보의 발신 여부를 결정하는 것을 특징으로 하는, 장치. - 차량의 속도 설정 방법에 있어서,
상기 차량의 조향 장치에 대한 조작, 상기 차량의 감속 장치에 대한 조작, 상기 차량의 가속 장치에 대한 조작 또는 상기 차량의 내부를 촬영하는 카메라에 의해 촬영된 영상 중 적어도 일부에 기초하여 상기 차량의 운전자의 부주의를 감지하는 단계;
상기 운전자의 부주의가 감지되면, 상기 차량의 외부를 촬영하는 카메라에 의해 획득된 영상, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트, 상기 차량의 주변 차량의 궤적 또는 상기 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 상기 도로의 차선과 연관된 정보 및 상기 주변 차량과 연관된 정보 중 적어도 일부를 획득하는 단계; 및
상기 획득된 정보에 기초하여 감속 제어를 수행하는 단계를 포함하는 것을 특징으로 하는, 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180019683A KR102463722B1 (ko) | 2018-02-20 | 2018-02-20 | 차량의 속도 설정 장치 및 방법 |
| US16/203,685 US10882519B2 (en) | 2018-02-20 | 2018-11-29 | Apparatus and method for setting speed of vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180019683A KR102463722B1 (ko) | 2018-02-20 | 2018-02-20 | 차량의 속도 설정 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190105155A true KR20190105155A (ko) | 2019-09-16 |
| KR102463722B1 KR102463722B1 (ko) | 2022-11-07 |
Family
ID=67617598
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180019683A KR102463722B1 (ko) | 2018-02-20 | 2018-02-20 | 차량의 속도 설정 장치 및 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10882519B2 (ko) |
| KR (1) | KR102463722B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112428989A (zh) * | 2020-10-30 | 2021-03-02 | 惠州华阳通用电子有限公司 | 一种车辆控制方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102463722B1 (ko) * | 2018-02-20 | 2022-11-07 | 현대자동차주식회사 | 차량의 속도 설정 장치 및 방법 |
| KR102496290B1 (ko) * | 2018-07-06 | 2023-02-06 | 현대모비스 주식회사 | 헤딩각 보상 장치 및 방법 |
| JP7119984B2 (ja) * | 2018-12-21 | 2022-08-17 | トヨタ自動車株式会社 | 運転支援装置、車両、情報提供装置、運転支援システム、及び運転支援方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008077309A (ja) * | 2006-09-20 | 2008-04-03 | Denso Corp | 車両制御装置 |
| KR20130054660A (ko) * | 2011-11-17 | 2013-05-27 | 현대모비스 주식회사 | 차량의 전방 영상 및 측방 영상을 이용한 차선 인식 향상 시스템 및 그 방법 |
| KR101502510B1 (ko) * | 2013-11-26 | 2015-03-13 | 현대모비스 주식회사 | 차량의 차선 유지 제어 장치 및 방법 |
| KR20150051678A (ko) * | 2013-11-05 | 2015-05-13 | 현대모비스 주식회사 | Lkas와 카메라를 이용한 차량 사고 방지 장치 및 방법 |
| KR20150143139A (ko) * | 2014-06-13 | 2015-12-23 | 현대모비스 주식회사 | 차량용 운전자 위험 지수 관리 시스템 및 그 방법 |
| JP2016193683A (ja) * | 2015-04-01 | 2016-11-17 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018020692A (ja) * | 2016-08-04 | 2018-02-08 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018024344A (ja) * | 2016-08-10 | 2018-02-15 | 株式会社Subaru | 車両の走行制御装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003034240A (ja) * | 2001-07-25 | 2003-02-04 | Honda Motor Co Ltd | 車両の制動制御装置 |
| DE10227221A1 (de) * | 2002-06-18 | 2004-01-15 | Daimlerchrysler Ag | Verfahren zur Überwachung des Innen- bzw. Außenraums eines Fahrzeugs sowie ein Fahrzeug mit wenigstens einer Rundsichtkamera |
| WO2005037592A1 (de) * | 2003-09-23 | 2005-04-28 | Daimlerchrysler Ag | Verfahren und vorrichtung zur erkennung von spurwechselvorgängen für ein fahrzeug |
| JP4534754B2 (ja) * | 2004-12-21 | 2010-09-01 | 日産自動車株式会社 | 車線逸脱防止装置 |
| US7805232B2 (en) * | 2007-06-07 | 2010-09-28 | Gm Global Technology Operations, Inc. | Adaptive electronic brake system control apparatus and method |
| US9542847B2 (en) * | 2011-02-16 | 2017-01-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Lane departure warning/assistance method and system having a threshold adjusted based on driver impairment determination using pupil size and driving patterns |
| US8981942B2 (en) * | 2012-12-17 | 2015-03-17 | State Farm Mutual Automobile Insurance Company | System and method to monitor and reduce vehicle operator impairment |
| US9420958B2 (en) * | 2013-03-15 | 2016-08-23 | Honda Motor Co., Ltd. | System and method for determining changes in a body state |
| US9751534B2 (en) * | 2013-03-15 | 2017-09-05 | Honda Motor Co., Ltd. | System and method for responding to driver state |
| WO2014192369A1 (ja) | 2013-05-31 | 2014-12-04 | 日立オートモティブシステムズ株式会社 | 車両用危険報知制御装置 |
| EP3041720B1 (en) * | 2013-09-05 | 2019-12-04 | Robert Bosch GmbH | Enhanced lane departure warning with information from rear radar sensors |
| US9586584B2 (en) | 2013-09-11 | 2017-03-07 | Robert Bosch Gmbh | Modifying adaptive cruise control to mitigate rear-end collisions |
| EP3812962A1 (en) * | 2013-12-04 | 2021-04-28 | Mobileye Vision Technologies Ltd. | Navigating a vehicle to pass another vehicle |
| KR101519287B1 (ko) | 2014-02-14 | 2015-05-11 | 현대자동차주식회사 | 차량 충돌 방지 장치 및 그 방법 |
| JP2016001464A (ja) * | 2014-05-19 | 2016-01-07 | 株式会社リコー | 処理装置、処理システム、処理プログラム、及び、処理方法 |
| WO2016027270A1 (en) * | 2014-08-18 | 2016-02-25 | Mobileye Vision Technologies Ltd. | Recognition and prediction of lane constraints and construction areas in navigation |
| KR20160023193A (ko) | 2014-08-21 | 2016-03-03 | 현대자동차주식회사 | 긴급 제동 시스템에서 전방위 확장 적용을 위한 충돌 위험 판단 방법 및 장치 |
| JP6481196B2 (ja) | 2014-09-10 | 2019-03-13 | 三菱自動車工業株式会社 | ブレーキ制御装置 |
| US10166992B2 (en) * | 2015-05-22 | 2019-01-01 | Toyota Motor Engineering & Manufacturing North America, Inc. | Impairment evaluation system |
| JP6553470B2 (ja) | 2015-09-29 | 2019-07-31 | 株式会社Subaru | 危険度算出装置 |
| US9840253B1 (en) * | 2016-06-14 | 2017-12-12 | Delphi Technologies, Inc. | Lane keeping system for autonomous vehicle during camera drop-outs |
| US10290210B2 (en) * | 2017-01-11 | 2019-05-14 | Toyota Motor Engineering & Manufacturing North America, Inc. | Distracted driver notification system |
| WO2018229548A2 (en) * | 2017-06-16 | 2018-12-20 | Nauto Global Limited | System and method for contextualized vehicle operation determination |
| US11163309B2 (en) * | 2017-11-30 | 2021-11-02 | Direct Current Capital LLC | Method for autonomous navigation |
| KR102463722B1 (ko) * | 2018-02-20 | 2022-11-07 | 현대자동차주식회사 | 차량의 속도 설정 장치 및 방법 |
| US11227234B2 (en) * | 2018-06-11 | 2022-01-18 | Traxen Inc. | Normalized performance comparison techniques |
-
2018
- 2018-02-20 KR KR1020180019683A patent/KR102463722B1/ko active IP Right Grant
- 2018-11-29 US US16/203,685 patent/US10882519B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008077309A (ja) * | 2006-09-20 | 2008-04-03 | Denso Corp | 車両制御装置 |
| KR20130054660A (ko) * | 2011-11-17 | 2013-05-27 | 현대모비스 주식회사 | 차량의 전방 영상 및 측방 영상을 이용한 차선 인식 향상 시스템 및 그 방법 |
| KR20150051678A (ko) * | 2013-11-05 | 2015-05-13 | 현대모비스 주식회사 | Lkas와 카메라를 이용한 차량 사고 방지 장치 및 방법 |
| KR101502510B1 (ko) * | 2013-11-26 | 2015-03-13 | 현대모비스 주식회사 | 차량의 차선 유지 제어 장치 및 방법 |
| KR20150143139A (ko) * | 2014-06-13 | 2015-12-23 | 현대모비스 주식회사 | 차량용 운전자 위험 지수 관리 시스템 및 그 방법 |
| JP2016193683A (ja) * | 2015-04-01 | 2016-11-17 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018020692A (ja) * | 2016-08-04 | 2018-02-08 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018024344A (ja) * | 2016-08-10 | 2018-02-15 | 株式会社Subaru | 車両の走行制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112428989A (zh) * | 2020-10-30 | 2021-03-02 | 惠州华阳通用电子有限公司 | 一种车辆控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102463722B1 (ko) | 2022-11-07 |
| US20190256085A1 (en) | 2019-08-22 |
| US10882519B2 (en) | 2021-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3052961B1 (en) | Adaptive cruise control with on-ramp detection | |
| US11798421B2 (en) | Autonomous driving device | |
| JP6158523B2 (ja) | 車間距離制御装置 | |
| US10471960B2 (en) | Adaptive cruise control apparatus and method of operating adaptive cruise control in consideration of traffic condition | |
| US20120078484A1 (en) | Vehicle cruise control apparatus | |
| US11427166B2 (en) | Adaptive AEB system considering steerable path and control method thereof | |
| KR102463722B1 (ko) | 차량의 속도 설정 장치 및 방법 | |
| KR20170040971A (ko) | 레이더 모듈 및 레이더 모듈의 제어 방법 | |
| EP3657461A1 (en) | Information processing system and server | |
| JP6494020B2 (ja) | 車両の運転支援制御装置 | |
| KR20190045308A (ko) | 차량 판정 방법, 주행 경로 보정 방법, 차량 판정 장치, 및 주행 경로 보정 장치 | |
| US10040449B2 (en) | Method for avoiding a rear-end collision between a first vehicle and a second vehicle and control unit | |
| JP7204437B2 (ja) | 車両走行制御方法及び車両走行制御システム | |
| KR20150051550A (ko) | 성능이 개선된 운전보조시스템 및 그 제어방법 | |
| CN112703141A (zh) | 行驶辅助方法及行驶辅助装置 | |
| JP2017117192A (ja) | 運転支援装置 | |
| CN112714718B (zh) | 车辆控制方法及车辆控制装置 | |
| CN112829743B (zh) | 驾驶辅助装置 | |
| US11433888B2 (en) | Driving support system | |
| CN115440069B (zh) | 信息处理服务器、信息处理服务器的处理方法、非易失性存储介质 | |
| KR20200082457A (ko) | A d a s 알람 출력 제어 방법 및 장치 | |
| JP2016078730A (ja) | 車両走行制御装置 | |
| KR102526079B1 (ko) | 차량 및 그 제어방법 | |
| US20230242108A1 (en) | Vehicle control apparatus | |
| KR101511861B1 (ko) | 운전보조시스템 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant |