JPWO2012105152A1 - 超音波診断装置,および方法 - Google Patents
超音波診断装置,および方法 Download PDFInfo
- Publication number
- JPWO2012105152A1 JPWO2012105152A1 JP2012555710A JP2012555710A JPWO2012105152A1 JP WO2012105152 A1 JPWO2012105152 A1 JP WO2012105152A1 JP 2012555710 A JP2012555710 A JP 2012555710A JP 2012555710 A JP2012555710 A JP 2012555710A JP WO2012105152 A1 JPWO2012105152 A1 JP WO2012105152A1
- Authority
- JP
- Japan
- Prior art keywords
- elastic modulus
- displacement
- region
- ultrasonic
- diagnostic apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/485—Diagnostic techniques involving measuring strain or elastic properties
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52036—Details of receivers using analysis of echo signal for target characterisation
- G01S7/52042—Details of receivers using analysis of echo signal for target characterisation determining elastic properties of the propagation medium or of the reflective target
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/467—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means
- A61B8/469—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient characterised by special input means for selection of a region of interest
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5246—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode
Abstract
Description
圧縮方向の変位が推定され,変位の空間微分量である歪みを求め,画像化する。この方法では,撮像対象として,体表からの圧迫が容易なところに存在する臓器(例えば乳腺など)には極めて有効な方法であるが,必ずしも全ての撮像対象に対して有効では無い場合もある。例えば,体表と肝臓の間に介在層として,すべり面が存在するため,十分な変位を生じさせるような圧迫が困難である。また,従来方式で,弾性率を推定しようとする場合,境界条件が必要になるが,すべり面が存在すると境界条件が複雑となり,弾性率の推定が困難である。
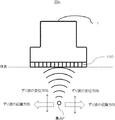
そこで,変位生成用送波ビームとしての集束ビームを用い,被検体内部に放射圧を印加し,介在層の影響を抑えて対象組織を変位させて,硬さの診断をする技術がある。例えば,特許文献1に記載されるARFI(Acoustic Radiation Force Impulse)Imagingがある。この技術では,集束ビームの進む方向に生じる組織の変位量を画像化したり,焦点での組織変位に伴って集束ビームの進む方向とは垂直な方向に生じるずり波の伝搬速度の推定からずり波伝搬領域内の平均的なずり弾性率といった弾性係数(以下,弾性率と呼ぶ)を測定し画像化したりする。ずり波生成による弾性率計測技術を用いると,上記のすべり面などの介在層の影響を低減する効果以外にも,超音波によって組織を変位させるため,手技依存性が少ない診断が期待される。
測定位置選定部40は,領域2を選定する際に,画像処理で領域1内の歪み分布の輪郭を抽出することによって選定する超音波診断装置,或いは上記の超音波診断装置であって,歪み情報に基づく歪み画像と弾性率を表示する表示部7を更に備え,測定位置選定部40は,操作者が表示部7に表示された歪み画像に基づき領域2を選定可能である超音波診断装置に関するものである。
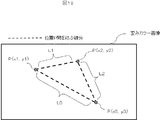
3)が得られる。ここでは,説明を簡単にするため,領域の数を3つとしているが,領域の数は2以上の任意の整数である。領域複数の領域の中から,領域R(n)(n=1,2,3,・・・)が弾性率の計算領域ROI_e,すなわち,フィルタGより大きい領域を持つ領域R(n)が最適な弾性率測定の領域として選定される。
この硬さスペクトル計算部35は,処理部として機能する中央処理部(Central Processing Unit:CPU)におけるプログラム実行により実現することができる。
k*d =(2πfM(n)/c)*d = 2π(n+1/2)‐‐‐(数式1)
ただし,kは波数(=2π/λ),cはずり波の伝搬速度,nは0もしくは正の整数(n=0,1,2,・・・)である。ずり波の伝搬速度は,組織性状に固有の値である。
TM(n)= d/c*(2/(2n+1)) ‐‐‐(数式2)
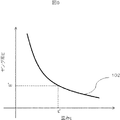
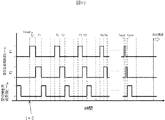
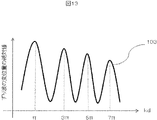
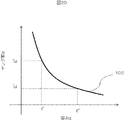
例えば,n=1, d=2[mm]であるとき,c=1[m/s]ではTM(1)=1.3[ms](fM(1)=750[Hz])となり,c = 5[m/s]では,TM(1)= 0.3[ms](fM(1)=3.8[kHz])となる。先に記述したように,ずり波の伝搬速度cは組織の硬さに依存し,硬いほどcは大きくなるので,TM(n)の値から,ずり波の伝搬速度,および,弾性率等の組織の硬さを推定することが可能となる。変位生成用送波ビームのON/OFF切替え周期であるTmは,数十Hz〜数kHzの範囲で制御するのが望ましい。また,大きなnに対するTM(n)から硬さを推定した方が,変位生成用の集束ビームの合計照射時間を短縮することができ,温度上昇を抑制することができる。温度上昇を抑制するため,各焦点への変位生成用送波ビームの合計照射時間が1ms以下となるように,各焦点への変位生成用送波ビームの照射のON/OFFが中央制御部3において制御されることが望ましい。
14に設定される。
ΔTM=d/c*(−4/((2n+1)*(2n+3)))‐‐‐(数式3)
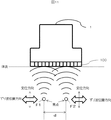
また,2焦点への変位生成用送波ビームのON/OFFが交互になるように制御したが,同時にON/OFFとなるように制御して同時刻に変位を生じさせることも可能である。この場合は,干渉波が増幅してピーク値を持つ条件はdが波長λの(n+1)倍のときであるので,数式1に対応して,数式4のようになる。
k*d= (2πf/c)*d = 2π(n+1) ‐‐‐(数式4)
高精度な弾性率の測定方法として,1回目に,切替え周期の間隔ΔTを粗く設定して測定し,TMを求め,次の測定で,TMの付近の切替え周期でΔTをより細かい設定にしてより詳細なTMの値を求めるようにしてもよい。
2…送受切替スイッチ,
3…中央制御部,
4…カラーDSC,
5…白黒DSC,
6…合成部,
7…表示部,
10…変位生成部,
11…変位生成用送波波形生成部,
12…焦点位置設定部,
13…変位生成用送波ビーム生成部,
14…ビーム時間設定部,
20…第一超音波送受信部,
22…変位演算部,
24…歪み演算部,
30…第二超音波送受信部,
32…ずり波変位演算部,
34…弾性率演算部,
35…硬さスペクトル計算部,
41…歪み画像,
42…カーネルK,
43…弾性率カラースケール,
44…フィルタG,
45…Bモード像,
46…弾性率画像,
47…弾性率(絶対値,最大−最小),
40…測定位置選定部,
50…カラースケール設定部,
60…弾性率測定位置演算部,
61…入力部,
62…変位生成用ビーム伝搬経路推定部,
100…超音波探触子1の各素子。
Claims (15)
- 被検体に超音波ビームを送信し,エコー信号を受信する超音波探触子を用いる超音波診断装置であって,
第一の変位検出用ビームを放射し,受波した前記被検体からのエコー信号に基づき,領域1内の歪み情報を演算する歪み演算部と,
前記被検体内に集束ビームを放射して,前記被検体内の組織を変位させる変位生成部と,第二の変位検出用ビームを放射し,受波した前記被検体からのエコー信号に基づき,前記集束ビームにより生じるずり波の変位を検出して,前記領域1の内部に含まれる領域2内の弾性率を検出する弾性率演算部と,
前記歪み情報に基づく歪み画像と前記弾性率を表示する表示部を有する,
ことを特徴とする超音波診断装置。 - 請求項1に記載の超音波診断装置であって,
前記歪み情報に基づき,前記弾性率を検出する,少なくとも1つの弾性率検出位置を選定する測定位置選定部を更に有し,
前記集束ビームを照射する少なくとも1つの焦点位置が,前記測定位置選定部によって選定された少なくとも1つの前記弾性率検出位置から決定される,
ことを特徴とする超音波診断装置。 - 請求項2に記載の超音波診断装置であって,
前記測定位置選定部は,歪みの分布が均一となる弾性率検出位置を1箇所選定し,
前記集束ビームを照射する異なる2つの前記焦点位置が,選定された前記弾性率検出位置から決定される,
ことを特徴とする超音波診断装置。 - 請求項3に記載の超音波診断装置であって,
前記変位生成部は前記集束ビームの送波時間を設定する送波ビーム時間設定部を有し,
前記送波ビーム時間設定部は,異なる2つの前記焦点位置に照射する前記集束ビームのON/OFF切替え周期が同じで,かつ,前記ON/OFF切替え周期が,周期または位相のチャープ信号となるように変化させながら前記送波時間を設定する,
ことを特徴とする超音波診断装置。 - 請求項2に記載の超音波診断装置であって,
前記測定位置選定部は,歪みの分布が均一となる弾性率検出位置を複数箇所選定し,
前記集束ビームを照射する少なくとも1つの前記焦点位置が,前記測定位置選定部において選定された複数箇所の前記弾性率検出位置から決定される,
ことを特徴とする超音波診断装置。 - 請求項2に記載の超音波診断装置であって,
前記測定位置選定部は,操作者が前記表示部に表示された画像を見ながら前記弾性率検出位置を選択することが可能である,
ことを特徴とする超音波診断装置。 - 請求項1に記載の超音波診断装置であって,
前記表示部は,表示される前記歪み画像の表示範囲における前記弾性率を示すカラースケールを表示する,
ことを特徴とする超音波診断装置。 - 被検体に超音波ビームを送信し,エコー信号を受信する超音波探触子を用いる超音波診断装置であって,
第一の変位検出用ビームを放射し,受波した前記被検体からのエコー信号に基づき,領域1内の歪み情報を演算する歪み演算部と,
前記歪み情報に基づき,前記領域1の内部に含まれる領域2を選定する測定位置選定部と,
前記被検体内に集束ビームを放射して,前記被検体内の組織を変位させる変位生成部と,第二の変位検出用ビームを放射し,受波した前記被検体からのエコー信号に基づき,前記集束ビームにより生じるずり波の変位を検出して,前記領域2内の弾性率を検出する弾性率演算部を備える,
ことを特徴とする超音波診断装置。 - 請求項8に記載の超音波診断装置であって,
前記測定位置選定部は,前記領域2を選定する際に,前記領域1内の歪みの分布の標準偏差,もしくは,最大値と最小値の差がある閾値より小さくなる位置を求める,
ことを特徴とする超音波診断装置。 - 請求項8に記載の超音波診断装置であって,
前記弾性率演算部は,
前記領域2内の弾性率,および前記領域2内の前記歪み情報を用いて応力を計算し,前記領域1内の前記歪み情報,および,前記応力から,前記領域1の前記弾性率を演算する,ことを特徴とする超音波診断装置。 - 請求項8に記載の超音波診断装置であって,
前記歪み情報に基づく歪み画像と前記弾性率を表示する表示部を更に備え,
前記測定位置選定部は,操作者が前記表示部に表示された前記歪み画像に基づき前記領域2を選定可能である,
ことを特徴とする超音波診断装置。 - 被検体に超音波ビームを送信し,被検体からのエコー信号を受信する超音波探触子を用い,受信した当該エコー信号に基づき画像を表示部に表示する超音波表示方法であって,
第一の変位検出用ビームを放射して被検体からのエコー信号を受波し,第一の領域内の歪み情報を演算し,
演算した前記歪み情報に基づく歪み画像を前記表示部に表示し,
前記被検体内に集束ビームを放射して前記被検体の組織を変位させ,
前記第二の変位検出用ビームを放射して前記被検体からのエコー信号を受信し,前記集束ビームにより生ずるずり波の変位を検出し,
前記ずり波の変位に基づき,前記第一の領域に含まれる第二の領域内の弾性率を演算し,演算した前記弾性率を前記表示部に表示する,
ことを特徴とする超音波表示方法。 - 請求項12に記載の超音波表示方法であって,
前記歪み情報に基づき選定された前記集束ビームの焦点位置を決定する,
ことを特徴とする超音波表示方法。 - 請求項12に記載の超音波表示方法であって,
前記第二の変位検出用ビームを放射する前記第二の領域を選定する際,前記表示部に表示された前記歪み画像に基づき,前記歪み情報が均一な場所から選定する,
ことを特徴とする超音波表示方法。 - 請求項12に記載の超音波表示方法であって,
前記表示部に,表示される前記歪み画像の表示範囲における前記弾性率を示すスケールを表示する,
ことを特徴とする超音波表示方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012555710A JP5619191B2 (ja) | 2011-02-04 | 2011-12-28 | 超音波診断装置,および方法 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011023152 | 2011-02-04 | ||
| JP2011023152 | 2011-02-04 | ||
| JP2012555710A JP5619191B2 (ja) | 2011-02-04 | 2011-12-28 | 超音波診断装置,および方法 |
| PCT/JP2011/080448 WO2012105152A1 (ja) | 2011-02-04 | 2011-12-28 | 超音波診断装置,および方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2012105152A1 true JPWO2012105152A1 (ja) | 2014-07-03 |
| JP5619191B2 JP5619191B2 (ja) | 2014-11-05 |
Family
ID=46602382
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012555710A Active JP5619191B2 (ja) | 2011-02-04 | 2011-12-28 | 超音波診断装置,および方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20130317361A1 (ja) |
| EP (1) | EP2671511B1 (ja) |
| JP (1) | JP5619191B2 (ja) |
| CN (1) | CN103347450B (ja) |
| WO (1) | WO2012105152A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10251627B2 (en) * | 2013-06-26 | 2019-04-09 | Koninklijke Philips N. V. | Elastography measurement system and method |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5771758B2 (ja) * | 2012-12-25 | 2015-09-02 | 日立アロカメディカル株式会社 | 超音波診断装置 |
| JP6305699B2 (ja) * | 2013-07-01 | 2018-04-04 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置及び超音波イメージングプログラム |
| CN103454640A (zh) * | 2013-09-13 | 2013-12-18 | 北京东方惠尔图像技术有限公司 | 一种超声波成像装置和成像方法 |
| JP6307234B2 (ja) * | 2013-09-19 | 2018-04-04 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| CN103462643B (zh) * | 2013-09-29 | 2015-02-11 | 深圳市开立科技有限公司 | 一种剪切波速度测量方法、装置和系统 |
| JP6162575B2 (ja) * | 2013-10-30 | 2017-07-12 | 東芝メディカルシステムズ株式会社 | 超音波画像診断装置 |
| JP5730978B2 (ja) | 2013-11-08 | 2015-06-10 | 日立アロカメディカル株式会社 | 超音波診断装置、及び方法 |
| KR101580584B1 (ko) * | 2013-11-28 | 2015-12-28 | 삼성전자주식회사 | 탄성 영상 내에 종양을 표시하는 방법 및 이를 위한 초음파 장치 |
| US20150148676A1 (en) * | 2013-11-28 | 2015-05-28 | Samsung Electronics Co., Ltd. | Method and ultrasound apparatus for marking tumor on ultrasound elastography image |
| JP6462340B2 (ja) * | 2013-12-13 | 2019-01-30 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置、画像処理装置及び画像処理方法 |
| KR20150070859A (ko) | 2013-12-17 | 2015-06-25 | 삼성전자주식회사 | 전단파를 이용하여 관심 영역에 대한 탄성 정보를 획득하는 방법 및 장치. |
| CN103700111A (zh) * | 2013-12-30 | 2014-04-02 | 深圳市开立科技有限公司 | 一种绘制图像标尺的方法和设备 |
| CN103720489B (zh) * | 2013-12-30 | 2015-10-28 | 中国科学院深圳先进技术研究院 | 病变组织生长监测方法和系统 |
| FR3017041B1 (fr) * | 2014-01-31 | 2016-03-04 | Centre Nat Rech Scient | Procede et dispositif ultrasonore de caracterisation des milieux mous anisotropes, et ensemble de sonde ultrasonore pour un tel dispositif de caracterisation |
| JP6333608B2 (ja) | 2014-04-16 | 2018-05-30 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置及び制御プログラム |
| JP6591454B2 (ja) * | 2014-05-30 | 2019-10-16 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 多重音響ウィンドウからの同期されたフェイズドアレイデータの取得 |
| KR101643622B1 (ko) * | 2014-09-25 | 2016-07-29 | 삼성전자주식회사 | 초음파 영상 처리 방법 및 이를 위한 초음파 영상 장치 |
| JP6006769B2 (ja) * | 2014-10-16 | 2016-10-12 | 株式会社日立製作所 | 超音波診断装置 |
| KR102406937B1 (ko) * | 2014-11-07 | 2022-06-10 | 삼성메디슨 주식회사 | 초음파 영상장치 및 그 제어 방법 |
| EP3236857B1 (en) * | 2014-12-24 | 2020-05-06 | SuperSonic Imagine | Shear wave elastrography method and apparatus for imaging an anisotropic medium |
| WO2016152602A1 (ja) * | 2015-03-23 | 2016-09-29 | 富士フイルム株式会社 | 音響波画像生成装置およびその制御方法 |
| TWI580960B (zh) * | 2015-05-08 | 2017-05-01 | 國立臺灣大學 | 彈性分布影像生成系統 |
| WO2016193025A1 (en) * | 2015-06-04 | 2016-12-08 | Koninklijke Philips N.V. | System and method for precision diagnosis and therapy augmented by cancer grade maps |
| US10660604B2 (en) | 2015-07-13 | 2020-05-26 | Otonexus Medical Technologies, Inc. | Apparatus and method for characterization of acute otitis media |
| JP6259953B2 (ja) * | 2015-08-03 | 2018-01-10 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | せん断波を用いる測定に関する超音波システム及び方法 |
| CN105212968B (zh) * | 2015-10-29 | 2019-01-04 | 无锡海斯凯尔医学技术有限公司 | 弹性检测方法和设备 |
| KR20170116824A (ko) * | 2016-04-12 | 2017-10-20 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 그 제어 방법 |
| US10675001B2 (en) * | 2016-06-04 | 2020-06-09 | Otonexus Medical Technologies, Inc. | Apparatus and method for characterization of a ductile membrane, surface, and sub-surface properties |
| KR20180054360A (ko) * | 2016-11-15 | 2018-05-24 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 초음파 진단 장치 제어 방법 |
| US10646202B2 (en) * | 2017-01-23 | 2020-05-12 | Siemens Medical Solutions Usa, Inc. | Sheer speed imaging using coherence |
| CN113180735B (zh) * | 2017-10-19 | 2022-11-22 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声弹性测量装置及弹性对比测量方法 |
| JP6996035B2 (ja) * | 2017-11-02 | 2022-01-17 | 富士フイルムヘルスケア株式会社 | 超音波診断装置、および、生体組織の物性評価方法 |
| KR102618496B1 (ko) * | 2017-12-21 | 2023-12-27 | 삼성메디슨 주식회사 | 초음파 영상 장치 및 그 표시 방법 |
| WO2019196033A1 (zh) * | 2018-04-11 | 2019-10-17 | 深圳迈瑞生物医疗电子股份有限公司 | 超声弹性成像方法和系统 |
| CN116831621A (zh) * | 2018-04-28 | 2023-10-03 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声弹性测量装置及方法 |
| US11452503B2 (en) * | 2018-05-18 | 2022-09-27 | Siemens Medical Solutions Usa, Inc. | Shear wave imaging based on ultrasound with increased pulse repetition frequency |
| WO2020037674A1 (zh) * | 2018-08-24 | 2020-02-27 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声成像装置和方法、超声弹性检测装置和方法 |
| CN109919918A (zh) * | 2019-02-21 | 2019-06-21 | 清华大学 | 弹性成像的控制方法及装置、计算机设备及可读存储介质 |
| CN113545806A (zh) * | 2020-04-26 | 2021-10-26 | 深圳迈瑞生物医疗电子股份有限公司 | 前列腺弹性成像方法和超声弹性成像系统 |
| CN116642410B (zh) * | 2023-07-26 | 2023-10-10 | 西安交通大学 | 一种非接触式cfrp结构损伤监测系统及方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003210460A (ja) * | 2002-01-18 | 2003-07-29 | Chikayoshi Sumi | ずり弾性率計測装置および治療装置 |
| JP4601413B2 (ja) * | 2004-12-21 | 2010-12-22 | 株式会社日立メディコ | 超音波診断装置 |
| JP2007105400A (ja) * | 2005-10-17 | 2007-04-26 | Toshiba Corp | 超音波診断装置及び画像処理装置 |
| US7632231B2 (en) * | 2006-03-22 | 2009-12-15 | Wisconsin Alumni Research Foundation | Ultrasonic strain imaging device and method providing parallel displacement processing |
| US8197408B2 (en) * | 2008-02-27 | 2012-06-12 | Siemens Medical Solutions Usa, Inc. | Sparse tissue property measurements in medical ultrasound imaging |
| US8187187B2 (en) * | 2008-07-16 | 2012-05-29 | Siemens Medical Solutions Usa, Inc. | Shear wave imaging |
| KR101014558B1 (ko) * | 2008-07-16 | 2011-02-16 | 주식회사 메디슨 | 스트레인 정규화를 통한 탄성영상 형성 방법 및 그를 위한초음파 시스템 |
| US9078592B2 (en) * | 2008-10-27 | 2015-07-14 | Wisconsin Alumni Research Foundation | Ultrasonic strain imaging device with selectable cost-function |
| US8992426B2 (en) * | 2009-05-04 | 2015-03-31 | Siemens Medical Solutions Usa, Inc. | Feedback in medical ultrasound imaging for high intensity focused ultrasound |
| US20110060222A1 (en) * | 2009-09-10 | 2011-03-10 | Board Of Regents Of The University Of Texas System | Method and apparatus for characterizing inhomgeneities using axial shear strain elastography |
| US8500639B2 (en) * | 2009-09-11 | 2013-08-06 | Mr Holdings (Hk) Limited | Systems and methods for shear wave field formation |
| CN101912278A (zh) * | 2010-08-12 | 2010-12-15 | 陈庆武 | 超声动态弹性成像探头及方法 |
-
2011
- 2011-12-28 EP EP11857846.7A patent/EP2671511B1/en not_active Not-in-force
- 2011-12-28 JP JP2012555710A patent/JP5619191B2/ja active Active
- 2011-12-28 US US13/982,801 patent/US20130317361A1/en not_active Abandoned
- 2011-12-28 CN CN201180066724.0A patent/CN103347450B/zh not_active Expired - Fee Related
- 2011-12-28 WO PCT/JP2011/080448 patent/WO2012105152A1/ja active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10251627B2 (en) * | 2013-06-26 | 2019-04-09 | Koninklijke Philips N. V. | Elastography measurement system and method |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012105152A1 (ja) | 2012-08-09 |
| JP5619191B2 (ja) | 2014-11-05 |
| US20130317361A1 (en) | 2013-11-28 |
| EP2671511B1 (en) | 2017-11-08 |
| CN103347450B (zh) | 2015-07-08 |
| CN103347450A (zh) | 2013-10-09 |
| EP2671511A1 (en) | 2013-12-11 |
| EP2671511A4 (en) | 2015-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5619191B2 (ja) | 超音波診断装置,および方法 | |
| JP5926193B2 (ja) | 超音波診断装置 | |
| EP2881041B1 (en) | Apparatus and method for ultrasonic diagnosis | |
| US11717270B2 (en) | Method, apparatus and system for imaging in ultrasonic scanning | |
| EP2926739B1 (en) | Acquisition control for elasticity ultrasound imaging | |
| JP5456047B2 (ja) | 超音波診断装置 | |
| Hasegawa et al. | High-frame-rate echocardiography using diverging transmit beams and parallel receive beamforming | |
| Jensen | Medical ultrasound imaging | |
| JP5646290B2 (ja) | 超音波診断装置及びその作動方法 | |
| JP5798117B2 (ja) | 超音波診断装置及び超音波診断装置の作動方法 | |
| KR102011545B1 (ko) | 초음파 진단 장치, 화상 처리 장치 및 화상 처리 방법 | |
| JP2013523324A (ja) | 超音波撮像の方法および装置 | |
| CN110301936B (zh) | 用于声辐射力脉冲的频率扫描 | |
| JP2015512273A (ja) | 超音波イメージングのための方法及び装置 | |
| JP2010207490A (ja) | 超音波診断装置及び音速推定方法 | |
| WO2018082458A1 (zh) | 一种定量剪切波弹性成像方法及系统 | |
| JP5588924B2 (ja) | 超音波診断装置 | |
| EP3381373B1 (en) | Ultrasonic diagnostic apparatus and method for controlling the same | |
| JP2008253663A (ja) | 超音波診断装置およびその制御処理プログラム | |
| US10080550B2 (en) | Ultrasonic apparatus and control method for the same | |
| KR102220822B1 (ko) | Arfi 이미징을 위한 교정 | |
| US11051789B2 (en) | Ultrasound image diagnostic apparatus | |
| JP2013244162A (ja) | 超音波診断装置 | |
| JP6000559B2 (ja) | 超音波診断装置 | |
| Hasegawa et al. | High frame rate echocardiography using diverging beams |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140513 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140714 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140819 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140916 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5619191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |