JP7280184B2 - システム、データストレージデバイスおよび方法 - Google Patents
システム、データストレージデバイスおよび方法 Download PDFInfo
- Publication number
- JP7280184B2 JP7280184B2 JP2019525981A JP2019525981A JP7280184B2 JP 7280184 B2 JP7280184 B2 JP 7280184B2 JP 2019525981 A JP2019525981 A JP 2019525981A JP 2019525981 A JP2019525981 A JP 2019525981A JP 7280184 B2 JP7280184 B2 JP 7280184B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- density
- voxel
- transformed
- box
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T12/00—Tomographic reconstruction from projections
- G06T12/20—Inverse problem, i.e. transformations from projection space into object space
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T12/00—Tomographic reconstruction from projections
- G06T12/30—Image post-processing, e.g. metal artefact correction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/421—Filtered back projection [FBP]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/424—Iterative
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Mathematical Physics (AREA)
- Pure & Applied Mathematics (AREA)
- Algebra (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Nuclear Medicine (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Description
いる画像再構成器165において使用される計算の基礎を形成する。
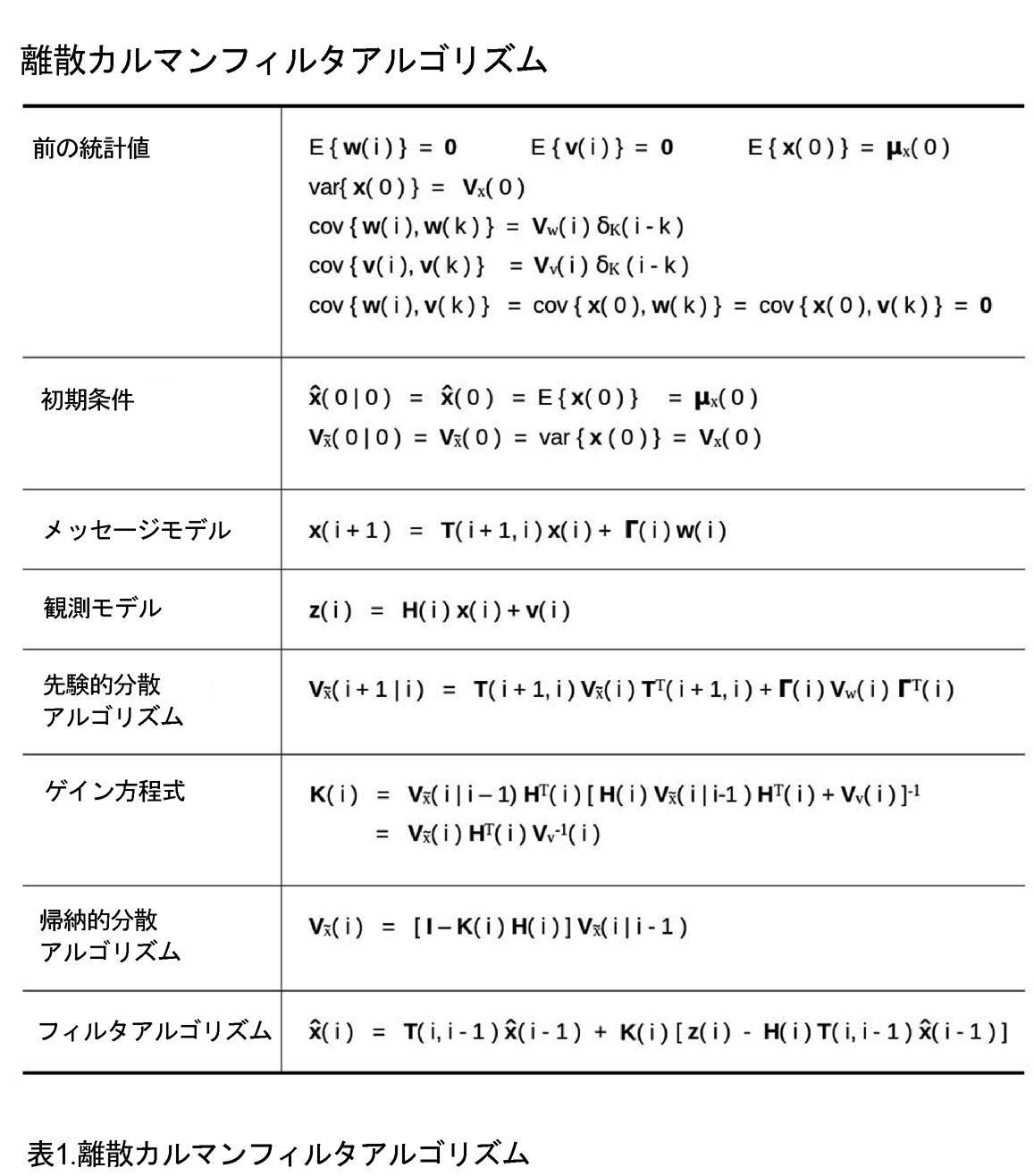
x(i)=x(i-1)+K(i)[z(i)-H(i)x(i-1)] [1.1]
K(i)=VX(i)HT(i)VV -1(i) [1.2]
ここで、
VW(0)は、状態の分散VX(i)に含まれている初期物体密度の分散を表す [1.3]
z(i)=H(i)x(i)+v(i) 投影測定ベクトル [1.4]
ここで、
H(i) 物体密度状態ベクトルx(i)の観測行列 [1.5]
v(i)は、観測/測定ノイズである。 [1.6]
K(i)→0 [1.7]
観測ノイズの固定パターンを前提として、固定されたグリッド分解能での反復中に、対応するeHECTORにおいてデータ処理の線形化の動作点を決定している間は、次の式をそのままにすることで、十分であることがある。
K(i+1)=K(i) [1.8]
T(i+1,i)=I [2.1]
Γ(i)=I i=0の場合 [2.2]
=0 i>0の場合
VX(i)=CXVX(i|i-1)=CXVX(i-1) [2.3]
帰納的分散アルゴリズムから、次式が得られる。
K(i)H(i)=I-CX(i)又はCX(i)=I-K(i)H(i) [2.4]
zdd=σpd/σf11(pd)=zd [2.5]
ここで、zdは、インデックスdでのZ行列の対角非ゼロ要素を表し、σは微分演算子である。傾斜zdは、データ201及び286のノイズ特性に応じて関数f12及び関数f11から得られた重み付きの組み合わせであってもよい。係数zdの使用は、下でさらに説明される影響関数による制約を受けることがある。
lqq=σvq/σg22(vq)lq [2.6]
インデックスqqをqに置き換えると、対角要素を示す。係数lqの使用は、下でさらに説明される影響関数による制約を受けることがある。
(i)簡単にするために、G=Iのままにし、
(ii)dim(z)≧dim(x)であると仮定し、zは冗長であるが、物体密度xを計算するために独立して収集された測定値であるとすると、
新しい小信号の、入力データ201に依存する、カルマンフィルタに似たゲイン行列K’が得られる(dim(z)<dim(x)の場合に使用されるループ内の平滑化処理/エントロピー増加255及び260の処理を無視する)。
K’=LKZ [2.7]
H’=Z-1HL-1 [2.8]
K’H’=LKZZ-1HL-1=LKHL-1=L(I-CX)L-1=(I-LCXL-1) [2.9]
ここで、det||L||det||L-1||=1、CXのルート<<1であり、適切なLRAの使用を仮定する。小信号近似の場合に、フィードバックループを再帰的に通過することによって、最適なカルマンフィルタゲインに対するLRAの近似の逸脱CXによって制限される幾何学的物体密度縮小係数が得られる。例えば、IとKHの間の一致に応じて後の分散の削減を示す、表1の線形カルマンフィルタの帰納的分散アルゴリズムを比較する。反対に、一致しない測定成分は、それ以上縮小傾向があるマッピングがない、加重最小二乗推定につながる。収束での残差の構造は、診断システムの性能に役立つ。例えば、ホワイトノイズの投影残差及び投影残差において無視できる物体の特徴(もしあれば)は、収束を示し、再構成において取得されるモデルの精度を定量化することがある。
(i)一連の反復における物体の特徴の残差の縮小、
(ii)測定によって引き起こされる投影の背景ノイズの存在(例えば、X線断層撮影又は電子線断層撮影の場合の近似的な投影のホワイトノイズ)、物体の投影の特徴の不在(例えば、同じ物体の異なる測定のセットの残差間の差異を調べることによる)、及び
(iii)グリッド分解能の増加でイノベーションを比較するときの、連続的なホワイトイノベーションデータ216に近いデータの存在(216のより高い分解能でのピクセルに対応するように補間する必要があるより低いグリッド分解能からの遡及的なイノベーションステップ)。
1.単一のモデルパラメータの評価を追加する場合でも、著しく計算量が増加する。
2.収束が達成されたように見える場合でも、強い物体の特徴を示す、反復ごとの投影残差の高い相関関係。この欠点は、例えばイノベーション216に関する、誤差密度の縮小傾向が大きいマッピングの欠如に起因しており、最適解から遠いモデルパラメータの効果的な調整を支援しない。
3.明示的な反復的数値最小化(山登り法)を使用して、単一の特定の固定されたパラメータpに関して性能基準を決定し(一部分において、最小化する解からの遠い距離に起因する)、無限又は単数に近いパラメータ更新行列を作成し、多数の可変モデルパラメータを考慮する能力をさらに制限する、投影残差の高い相関関係。
4.安定化ペナルティ関数d(y:x)を識別するのが困難である(例えば、米国特許第8,923,583号を参照)。
1.反復的データ処理の第1のレベルで、線形化されたカルマン投影法によって提供される、数値的ではない、解析的方法を使用し、そのレベル内で、少ない数値計算量(方程式2.9)で、反復から反復への縮小傾向が大きいマッピングを作成する、効率。
2.効果的な線形に近い小信号近似計算を可能にするほど、密度推定値の変化を十分小さく保つ、グリッド分解能の緩やかな増加。
3.ベクトルp内のパラメータの数値最適化。各反復内で、上の(1)によって最適解に近づきながら、(イノベーションプロセスを作成する反復の)投影残差の行列が、それらのパラメータの変化を明確に表す(最適化に関連付けられたヘッシアン行列の非特異性)。パラメータは、例えば、図2に概略的に示されている、投影行列Hmno、変換f11、f12、f21、及びg22、並びにその他の関連するシステム変数の係数に対する影響を表してもよい。
4.ボックス225などの安定化ペナルティ関数を設計及び適用することの単純さ。
1.分解能の各レベルに必要な期待される反復回数を、理論的及び実験的評価から推定する。期待される収束は、特定の再構成の状況(例えば、頭蓋の再構成)に適用されてもよい。
2.物体データの残差値が反復間で有意に縮小する間、特定の分解能で反復を続行する。特に、残差データの変化がシステムノイズレベルと比較して大きい場合、反復を続行するが、残差データの変化が有意でない場合(例えば、残差データの変動がノイズ又はその他の基準に相当する場合)、反復を終了する。
3.影響関数及びその他の非線形のシステム関数が線形に近い領域(NLR:near-linear regions)内で動作していない間、例えば、影響関数の入力値及び出力値が10%を超えて異なり、他の非線形関数の入力/出力の関係が、先行する反復と比較したときに10%を超えて変化する場合、特定の分解能で反復を続行する。
データが、診断上重要な領域の大部分(例えば、領域を含んでいる物体情報の99%)を十分適切に通って、上で示したすべての関数のNLRを通過した後に、次の分解能に切り替える前に、線形プロセスの誤差の縮小の有効性を使用して、数回(例えば、1回又は2回)の追加の反復を続行する。
1.分散安定化又は再設計データ変換の使用、
2.表1のゲイン方程式を近似するための、イノベーションの寄与の可変平滑化及び増幅、及び
3.データの信頼性を考慮した、ロバストな推定のための影響関数の使用。
s’=sqrt(m)+c(m,q) [4.1]
ここで補正cは、基本的な近似からの小さいずれを表す。補正c(m,q)(qは定数)は、二次の項に対応するために使用されてもよい。さらに一般的には、分散安定化変換では、定数パラメータqが、次のように見えてもよい。
s’=f(m,q) [4.2]
[発明の項目]
[項目1]
投影空間データを格納するための非一時的データストレージであって、前記投影空間データが観察対象の物体の密度領域内にあり、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、非一時的データストレージと、
少なくとも1つのプロセッサを含んでいる画像再構成コンピュータであって、前記少なくとも1つのプロセッサが、
前記密度領域内の前記投影空間データを前記非一時的データストレージから受信することと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算することと、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算することと、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算することと、
対応する入力ピクセル値及び参照ピクセル値に対して前記入力変換関数の反転傾斜及び前記参照変換関数の反転傾斜を使用してピクセルごとのイノベーションスケーリング行列を計算することと、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算することと、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算することと、
ボクセルごとの更新スケーリング行列の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算することであって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ことと、
前記変換物体ボクセル密度更新推定値を、対応する変換先行ボクセルデータ推定値に加算して、変換密度推定値を取得することと、
前記変換密度推定値を使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行するよう機能する、画像再構成コンピュータと、
を備えている、システム。
[項目2]
前記画像再構成コンピュータが、
ピクセルごとの補正ゲイン行列の要素を計算することであって、前記ピクセルごとの補正ゲイン行列の少なくとも1つの要素が、前記第2のピクセルイノベーション結果データ内の対応するピクセルに関連付けられる、ことと、
前記第2のピクセルイノベーション結果データと前記ピクセルごとの補正ゲイン行列とを使用して第3のピクセルイノベーション結果データを計算することであって、
前記予備的変換物体更新データが、前記断層撮影再構成アルゴリズム及び前記第3のピクセルイノベーション結果データを使用して計算される、ことと、
を実行するようさらに機能する、項目1に記載のシステム。
[項目3]
前記第1のピクセルイノベーション結果データ、前記第2のピクセルイノベーション結果データ、及び前記第3のピクセルイノベーション結果データが、影響関数を使用して処理され、
前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値が、影響関数を使用して処理される、項目2に記載のシステム。
[項目4]
前記画像再構成コンピュータが、
正の制約関数を使用して前記変換密度推定値を前記密度領域内に逆変換し、生のボクセル密度推定データを取得することと、
前記生のボクセル密度推定データをフィルタリングして、予備的ボクセル密度推定データを取得することと、
前記予備的ボクセル密度推定データを後処理して、(a)等しい又は増加したグリッド分解能、又は(b)等しい又は増加した密度値の分解能のうちの1つ又は複数に基づいて、1つ又は複数のボクセルを作成することと、
投影プロセッサを使用して前記1つ又は複数のボクセルを処理することによって予測投影データを計算することと、
フィルタを前記予測投影データに適用して、平滑化された予測投影データを取得することと、
前記参照変換関数を前記平滑化された予測投影データに適用して、前記1つ又は複数の予測変換ピクセルを取得することと、
を実行するようさらに機能する、項目1に記載のシステム。
[項目5]
前記投影プロセッサが、少なくとも1つのシステムパラメータ又は物体パラメータを表す、項目4に記載のシステム。
[項目6]
前記画像再構成コンピュータが、
1つ又は複数の物体空間のボクセルのセットに基づいて、平滑化された前のボクセル密度推定データを計算することであって、前記1つ又は複数の物体空間のボクセルのセットが、サイズが変化する、単一のグリッド点を含む複数の分解能のグリッドをカバーする、ことと、
前記平滑化された前のボクセル密度推定データを使用して前記変換先行ボクセルデータ推定値を計算することと、
を実行するようさらに機能する、項目1に記載のシステム。
[項目7]
前記画像再構成コンピュータが、
反復回数を計算して追跡し、事前に決定された制限する反復回数を使用して、ある分解能レベルでそれ以上の計算を終了することと、
反復を計算し、使用しているある分解能レベルで、データのノイズレベル又はその他の基準に関して、物体の投影残差データ又は体積データの誤差の縮小が満たされたときに、反復を終了することと、
ある分解能レベルで、反復を計算し、(i)十分な物体データに、非線形データ変換の小信号処理の基準が適用され、(ii)その後、終了の前に、反復回数が追加された後に、反復を終了することと、
を実行するようさらに機能する、項目1に記載のシステム。
[項目8]
投影空間データが、電磁(EM)エネルギー、X線エネルギー、粒子線、赤外線エネルギー、光エネルギー、又は振動エネルギーの投影収集プロセスのうちの少なくとも1つから、或いはその他のプロセスの出力から取得される、項目1に記載のシステム。
[項目9]
前記画像再構成コンピュータが、
ボクセルのセットについての投影値を計算することと、
逆投影値又はピクセルのセットについての値を表すボクセルを計算することと、
他の情報源を使用して残りのピクセル及びボクセルを計算することと、
ボクセルとピクセルの間の関数関係を使用するか、又は構築することと、
を実行するようさらに機能する、項目1に記載のシステム。
[項目10]
前記観察対象の物体を表す前記物体空間画像を受信するための出力デバイスをさらに備えており、前記出力デバイスが、データストレージデバイス、表示デバイス、印刷デバイス、又はコンピュータシステムのうちの少なくとも1つである、項目1に記載のシステム。
[項目11]
前記画像再構成コンピュータが、物体空間ボクセルデータのセット及び予測空間データのセットのうちの少なくとも1つを平滑化するようさらに機能する、項目1に記載のシステム。
[項目12]
前記物体空間画像、前記密度領域からの投影残差、又は前記変換領域からの残差のうちの少なくとも1つを受信するためのインベスティゲータコンピュータをさらに備えており、前記インベスティゲータコンピュータが、少なくとも1つのプロセッサを含んでおり、前記少なくとも1つのプロセッサが、
前記物体空間画像、前記密度領域からの前記投影残差、又は前記変換領域からの残差のうちの少なくとも1つからの診断情報の抽出を実行することと、
前記1つ又は複数の入力投影ピクセル、投影方向、投影の変形、投影生成システムのプロセス、又は前記画像再構成コンピュータのうちの少なくとも1つを処理するためのパラメータを微調整することと、
を実行するよう機能する、項目1に記載のシステム。
[項目13]
再帰的に、収束の後に、外部から制御可能な固定されたパラメータ成分の固定されたセットに関して、第1のイノベーションプロセス、投影残差、又は前記画像再構成コンピュータの物体データの期待値のうちの少なくとも1つから得られる性能の尺度を生成し、
前記画像再構成コンピュータの外部にある前記インベスティゲータコンピュータが、既知の参照物体と前記対応する計算された物体密度との間の前記差異を特徴付ける前記投影残差又は物体の残差のうちの少なくとも1つの特性を使用しながら、パラメータベクトルの制御可能な成分を、初期設定から、外部の目的に対して最低のコストを生成する設定に徐々に変更するようさらに機能する、項目12に記載のシステム。
[項目14]
前記パラメータベクトルが、少なくとも1つのシステムパラメータ又は物体パラメータを表す、項目13に記載のシステム。
[項目15]
前記画像再構成コンピュータが、
特定の反復内で、前記第1のピクセルイノベーション結果データの第1のイノベーション残差コスト関数を減らしながら、外部から制御可能な固定されたパラメータのセットに関して、観察対象の物体を再構成すること、
を実行するようさらに機能する、項目1に記載のシステム。
[項目16]
前記画像再構成コンピュータが、
投影残差の近傍領域を表すか又は前記近傍領域から得られるパラメータ或いは先験的パラメータを使用してロバストな推定影響関数で前記投影残差を処理することであり、前記パラメータが、局所的な入力測定値、予測値、システムの特性、及び先験的に期待される物体及び測定の特性の関数である、処理すること、
を実行するようさらに機能する、項目1に記載のシステム。
[項目17]
前記画像再構成コンピュータが、
選択範囲上の投影残差の平滑化、又は選択範囲上の前記投影残差のスケーリングのうちの少なくとも1つによって、前記投影残差を処理すること
を実行するようさらに機能する、項目1に記載のシステム。
[項目18]
前記入力変換関数が非線形入力変換関数であり、前記参照変換関数が非線形参照変換関数である、項目1に記載のシステム。
[項目19]
前記非線形入力変換関数及び前記非線形参照変換関数が、前記1つ又は複数の入力投影ピクセルの分散安定化関数である、項目18に記載のシステム。
[項目20]
前記非線形入力変換関数及び前記非線形参照変換関数が、前記1つ又は複数の入力投影ピクセルのポアソン分散安定化平方根関数である、項目18に記載のシステム。
[項目21]
前記画像再構成コンピュータが、
前記ボクセルごとの更新スケーリング行列を計算することであり、前記ボクセルごとの更新スケーリング行列の要素が、対応する変換密度推定値の正の制約関数のボクセルごとの要素を使用して、ボクセルごとの逆変換の要素の反転傾斜から計算される、計算すること、
を実行するようさらに機能する、項目1に記載のシステム。
[項目22]
前記入力変換関数が非線形入力変換関数であり、前記正の制約関数の全部又は一部が前記非線形入力変換関数の逆関数である、項目21に記載のシステム。
[項目23]
前記正の制約関数が、前記正の制約関数のデータ範囲の少なくとも1つの領域内の外部入力を満たす出力値を計算する、項目21に記載のシステム。
[項目24]
前記画像再構成コンピュータが、
前記ボクセルごとの更新スケーリング行列を計算することであり、前記ボクセルごとの更新スケーリング行列の要素が、前のボクセル密度推定データを変換先行ボクセルデータ推定値に変換するフィードバック関数の傾斜から計算される、計算すること、
を実行するようにさらに機能する、項目1に記載のシステム。
[項目25]
前記画像再構成コンピュータが、
先行する物体密度のボクセルの予測を使用して、信頼性が低いか、又は不足している投影空間データの一部を再計算又は補正すること、
を実行するようさらに機能する、項目1に記載のシステム。
[項目26]
1つ又は複数のプロセッサを含んでいるコンピュータによって実行可能なソフトウェアコードを格納する非一時的データストレージデバイスであって、前記ソフトウェアコードが、
観察対象の物体の密度領域内の投影空間データを受信することであって、前記投影空間データが、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ことと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算することと、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算することと、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算することと、
対応する入力ピクセル値及び参照ピクセル値に対して前記入力変換関数の反転傾斜及び前記参照変換関数の反転傾斜を使用してピクセルごとのイノベーションスケーリング行列を計算することと、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算することと、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算することと、
ボクセルごとの更新スケーリング行列の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算することであって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ことと、
前記変換物体ボクセル密度更新推定値を、対応する変換先行ボクセルデータ推定値に加算して、変換密度推定値を取得することと、
前記変換密度推定値を使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行する、非一時的データストレージデバイス。
[項目27]
少なくとも1つのプロセッサを含んでいる画像再構成コンピュータによって実行される画像再構成のための方法であって、
観察対象の物体の密度領域内の投影空間データを受信するステップであって、前記投影空間データが、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ステップと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算するステップと、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算するステップと、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算するステップと、
対応する入力ピクセル値及び参照ピクセル値に対して前記入力変換関数の反転傾斜及び前記参照変換関数の反転傾斜を使用してピクセルごとのイノベーションスケーリング行列を計算するステップと、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算するステップと、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算するステップと、
ボクセルごとの更新スケーリング行列の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算するステップであって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ステップと、
前記変換物体ボクセル密度更新推定値を、対応する変換先行ボクセルデータ推定値に加算して、変換密度推定値を取得するステップと、
前記変換密度推定値を使用して、前記観察対象の物体を表す物体空間画像を再構成するステップと、
を含んでいる、方法。
Claims (71)
- 投影空間データを格納するための非一時的データストレージであって、前記投影空間データが観察対象の物体の密度領域内にあり、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、非一時的データストレージと、
少なくとも1つのプロセッサを含んでいる画像再構成コンピュータであって、前記少なくとも1つのプロセッサが、
前記密度領域内の前記投影空間データを前記非一時的データストレージから受信することと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算すること(ボックス205)と、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算すること(ボックス210)と、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算すること(ボックス215)と、
対応する入力ピクセル値及び参照ピクセル値に対する前記入力変換関数(f11)の反転傾斜及び前記参照変換関数(f12)の反転傾斜に基づくピクセルごとのイノベーションスケーリング行列(Z)を計算すること(ボックス220)と、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算すること(ボックス220)と、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算すること(ボックス235)と、
ボクセルごとの更新スケーリング行列(L)の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算すること(ボックス240)であって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ことと、
前記変換物体ボクセル密度更新推定値を対応する変換先行ボクセルデータ推定値に加算することに基づく変換密度推定値を計算すること(ボックス245)と、
正の制約関数(g22)を使用して前記変換密度推定値を前記変換領域から前記密度領域に逆変換し、生のボクセル密度推定データを取得する、逆変換すること(ボックス250)と、
前記生のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行するよう機能し、
前記入力変換関数(f11)及び前記参照変換関数(f12)が、線形関数又は非線形関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、画像再構成コンピュータと、
を備えている、システム。 - 前記画像再構成コンピュータが、
ピクセルごとの補正ゲイン行列の要素を計算することであって、前記ピクセルごとの補正ゲイン行列の少なくとも1つの要素が、前記第2のピクセルイノベーション結果データ内の対応するピクセルに関連付けられる、ことと、
前記第2のピクセルイノベーション結果データと前記ピクセルごとの補正ゲイン行列とを使用して第3のピクセルイノベーション結果データを計算することであって、
前記予備的変換物体更新データが、前記断層撮影再構成アルゴリズム及び前記第3のピクセルイノベーション結果データを使用して計算される、ことと、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記第1のピクセルイノベーション結果データ、前記第2のピクセルイノベーション結果データ、及び前記第3のピクセルイノベーション結果データが、影響関数を使用して処理され、
前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値が、影響関数を使用して処理される、請求項2に記載のシステム。 - 前記画像再構成コンピュータが、
前記生のボクセル密度推定データを処理して、(a)等しい又は増加したグリッド分解能、又は(b)等しい又は増加した密度値の分解能のうちの1つ又は複数に基づいて、1つ又は複数のボクセル推定値を作成する、処理すること(ボックス260)と、
投影プロセッサを使用して前記1つ又は複数のボクセルを処理することによって予測投影データを計算すること(ボックス275)と、
前記参照変換関数を前記予測投影データに適用して、前記1つ又は複数の予測変換ピクセルを取得する、適用すること(ボックス210)と、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記投影プロセッサが、少なくとも1つのシステムパラメータ又は物体パラメータを表す、請求項4に記載のシステム。
- 前記画像再構成コンピュータが、
物体構造情報を使用して、1つ又は複数の物体空間のボクセルのセットに基づいて、前のボクセル密度推定データを計算することであって、前記1つ又は複数の物体空間のボクセルのセットが、サイズが変化する、単一のグリッド点を含む複数の分解能のグリッドをカバーする、計算すること(ボックス260)と、
前記前のボクセル密度推定データを使用して前記変換先行ボクセルデータ推定値を計算すること(ボックス290)と、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記画像再構成コンピュータが、
反復回数を計算して追跡し、事前に決定された制限する反復回数を使用して、ある分解能レベルでそれ以上の計算を終了することと、
反復を計算し、使用しているある分解能レベルで、データのノイズレベル又はその他の基準に関して、物体の投影残差データ又は体積データの誤差の縮小が満たされたときに、反復を終了することと、
ある分解能レベルで、反復を計算し、(i)十分な物体データに、非線形データ変換の小信号処理の基準が適用され、(ii)その後、終了の前に、反復回数が追加された後に、反復を終了することと、
を実行するようさらに機能する、請求項1に記載のシステム。 - 投影空間データが、電磁(EM)エネルギー、X線エネルギー、粒子線、赤外線エネルギー、光エネルギー、又は振動エネルギーの投影収集プロセスのうちの少なくとも1つから、或いはその他のプロセスの出力から取得される、請求項1に記載のシステム。
- 前記画像再構成コンピュータが、
ボクセルのセットについての投影値を計算することと、
逆投影値又はピクセルのセットについての値を表すボクセルを計算することと、
他の情報源を使用して残りのピクセル及びボクセルを計算することと、
ボクセルとピクセルの間の関数関係を使用するか、又は構築することと、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記観察対象の物体を表す前記物体空間画像を受信するための出力デバイスをさらに備えており、前記出力デバイスが、データストレージデバイス、表示デバイス、印刷デバイス、又はコンピュータシステムのうちの少なくとも1つである、請求項1に記載のシステム。
- 前記画像再構成コンピュータが、物体空間ボクセルデータのセット及び予測空間データのセットのうちの少なくとも1つを平滑化するようさらに機能する、請求項1に記載のシステム。
- 前記物体空間画像、前記密度領域からの投影残差、又は前記変換領域からの残差のうちの少なくとも1つを受信するためのインベスティゲータコンピュータをさらに備えており、前記インベスティゲータコンピュータが、少なくとも1つのプロセッサを含んでおり、前記少なくとも1つのプロセッサが、
前記物体空間画像、前記密度領域からの前記投影残差、又は前記変換領域からの残差のうちの少なくとも1つからの診断情報の抽出を実行することと、
前記1つ又は複数の入力投影ピクセル、投影方向、投影の変形、投影生成システムのプロセス、又は前記画像再構成コンピュータのうちの少なくとも1つを処理するためのパラメータを微調整することと、
を実行するよう機能する、請求項1に記載のシステム。 - 再帰的に、収束の後に、外部から制御可能な固定されたパラメータ成分の固定されたセットに関して、第1のイノベーションプロセス、投影残差、又は前記画像再構成コンピュータの物体データの期待値のうちの少なくとも1つから得られる性能の尺度を生成し、
前記画像再構成コンピュータの外部にある前記インベスティゲータコンピュータが、既知の参照物体と前記対応する計算された物体密度との間の前記差異を特徴付ける前記投影残差又は物体の残差のうちの少なくとも1つの特性を使用しながら、パラメータベクトルの制御可能な成分を、初期設定から、外部の目的に対して最低のコストを生成する設定に徐々に変更するようさらに機能する、請求項12に記載のシステム。 - 前記パラメータベクトルが、少なくとも1つのシステムパラメータ又は物体パラメータを表す、請求項13に記載のシステム。
- 前記画像再構成コンピュータが、
特定の反復内で、前記第1のピクセルイノベーション結果データの第1のイノベーション残差コスト関数を減らしながら、外部から制御可能な固定されたパラメータのセットに関して、観察対象の物体を再構成すること、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記画像再構成コンピュータが、
投影残差の近傍領域を表すか又は前記近傍領域から得られるパラメータ或いは先験的パラメータを使用してロバストな推定影響関数で前記投影残差を処理することであり、前記パラメータが、局所的な入力測定値、予測値、システムの特性、及び先験的に期待される物体及び測定の特性の関数である、処理すること、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記画像再構成コンピュータが、
選択範囲上の投影残差の平滑化、又は選択範囲上の前記投影残差のスケーリングのうちの少なくとも1つによって、前記投影残差を処理すること
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記入力変換関数が非線形入力変換関数であり、前記参照変換関数が非線形参照変換関数である、請求項1に記載のシステム。
- 前記非線形入力変換関数及び前記非線形参照変換関数が、前記1つ又は複数の入力投影ピクセルの分散安定化関数である、請求項18に記載のシステム。
- 前記画像再構成コンピュータが、
前記ボクセルごとの更新スケーリング行列を計算することであり、前記ボクセルごとの更新スケーリング行列の要素が、対応する変換密度推定値の前記正の制約関数のボクセルごとの要素を使用して、ボクセルごとの逆変換の要素の反転傾斜から計算される、計算すること、
を実行するようさらに機能する、請求項1に記載のシステム。 - 前記入力変換関数が非線形入力変換関数であり、前記正の制約関数の全部又は一部が前記非線形入力変換関数の逆関数である、請求項1に記載のシステム。
- 前記正の制約関数が、前記正の制約関数のデータ範囲の少なくとも1つの領域内の外部入力を満たす出力値を計算する、請求項1に記載のシステム。
- 前記画像再構成コンピュータが、
前記ボクセルごとの更新スケーリング行列を計算することであり、前記ボクセルごとの更新スケーリング行列の要素が、前のボクセル密度推定データを変換先行ボクセルデータ推定値に変換するフィードバック関数の傾斜から計算される、計算すること、
を実行するようにさらに機能する、請求項1に記載のシステム。 - 前記画像再構成コンピュータが、
先行する物体密度のボクセルの予測を使用して、信頼性が低いか、又は不足している投影空間データの一部を再計算又は補正すること、
を実行するようさらに機能する、請求項1に記載のシステム。 - 1つ又は複数のプロセッサを含んでいるコンピュータによって実行可能なソフトウェアコードを格納する非一時的データストレージデバイスであって、前記ソフトウェアコードが、
観察対象の物体の密度領域内の投影空間データを受信することであって、前記投影空間データが、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ことと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算すること(ボックス205)と、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算すること(ボックス210)と、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算すること(ボックス215)と、
対応する入力ピクセル値及び参照ピクセル値に対する前記入力変換関数(f11)の反転傾斜及び前記参照変換関数(f12)の反転傾斜に基づくピクセルごとのイノベーションスケーリング行列(Z)を計算すること(ボックス220)と、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算すること(ボックス220)と、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算すること(ボックス235)と、
ボクセルごとの更新スケーリング行列(L)の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算すること(ボックス240)であって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ことと、
前記変換物体ボクセル密度更新推定値を対応する変換先行ボクセルデータ推定値に加算することに基づく変換密度推定値を計算すること(ボックス245)と、
正の制約関数(g22)を使用して前記変換密度推定値を前記変換領域から前記密度領域に逆変換し、生のボクセル密度推定データを取得する、逆変換すること(ボックス250)と、
前記生のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行し、
前記入力変換関数(f11)及び前記参照変換関数(f12)が、線形関数又は非線形関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、非一時的データストレージデバイス。 - 少なくとも1つのプロセッサを含んでいる画像再構成コンピュータによって実行される画像再構成のための方法であって、
観察対象の物体の密度領域内の投影空間データを受信するステップであって、前記投影空間データが、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ステップと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算するステップ(ボックス205)と、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算するステップ(ボックス210)と、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算するステップ(ボックス215)と、
対応する入力ピクセル値及び参照ピクセル値に対する前記入力変換関数(f11)の反転傾斜及び前記参照変換関数(f12)の反転傾斜に基づくピクセルごとのイノベーションスケーリング行列(Z)を計算するステップ(ボックス220)と、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算するステップ(ボックス220)と、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算するステップ(ボックス235)と、
ボクセルごとの更新スケーリング行列(L)の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算するステップ(ボックス240)であって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ステップと、
前記変換物体ボクセル密度更新推定値を対応する変換先行ボクセルデータ推定値に加算することに基づく変換密度推定値を計算するステップ(ボックス245)と、
正の制約関数(g22)を使用して前記変換密度推定値を前記変換領域から前記密度領域に逆変換し、生のボクセル密度推定データを取得する、逆変換するステップ(ボックス250)と、
前記生のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成するステップと、
を含み、
前記入力変換関数(f11)及び前記参照変換関数(f12)が、線形関数又は非線形関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、方法。 - 前記ソフトウェアコードは、
ピクセルごとの補正ゲイン行列の要素を計算することであって、前記ピクセルごとの補正ゲイン行列の少なくとも1つの要素が、前記第2のピクセルイノベーション結果データ内の対応するピクセルに関連付けられる、ことと、
前記第2のピクセルイノベーション結果データと前記ピクセルごとの補正ゲイン行列とを使用して第3のピクセルイノベーション結果データを計算することであって、
前記予備的変換物体更新データが、前記断層撮影再構成アルゴリズム及び前記第3のピクセルイノベーション結果データを使用して計算される、ことと、
をさらに実行するよう機能する、請求項25に記載の非一時的データストレージデバイス。 - ピクセルごとの補正ゲイン行列の要素を計算するステップであって、前記ピクセルごとの補正ゲイン行列の少なくとも1つの要素が、前記第2のピクセルイノベーション結果データ内の対応するピクセルに関連付けられる、ステップと、
前記第2のピクセルイノベーション結果データと前記ピクセルごとの補正ゲイン行列とを使用して第3のピクセルイノベーション結果データを計算するステップであって、
前記予備的変換物体更新データが、前記断層撮影再構成アルゴリズム及び前記第3のピクセルイノベーション結果データを使用して計算される、ステップと、
をさらに含む、請求項26に記載の方法。 - 投影空間データを格納するための非一時的データストレージであって、前記投影空間データが観察対象の物体の密度領域内にあり、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、非一時的データストレージと、
少なくとも1つのプロセッサを含んでいる画像再構成コンピュータであって、前記少なくとも1つのプロセッサが、
前記密度領域内の前記投影空間データを前記非一時的データストレージから受信することと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算すること(ボックス205)と、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算すること(ボックス210)と、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算すること(ボックス215)と、
対応する入力ピクセル値及び参照ピクセル値に対する前記入力変換関数(f11)の反転傾斜及び前記参照変換関数(f12)の反転傾斜に基づくピクセルごとのイノベーションスケーリング行列(Z)を計算すること(ボックス220)と、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列(Z)の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算すること(ボックス220)と、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算すること(ボックス235)と、
ボクセルごとの更新スケーリング行列(L)の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算すること(ボックス240)であって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ことと、 前記変換物体ボクセル密度更新推定値及び対応する変換先行ボクセルデータ推定値に基づく変換密度推定値を計算すること(ボックス245)と、
正の制約関数(g22)を使用して前記変換密度推定値を前記変換領域から前記密度領域に逆変換し、生のボクセル密度推定データを取得する、逆変換すること(ボックス250)と、
前記生のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行するよう機能し、
前記入力変換関数(f11)及び前記参照変換関数(f12)が、線形関数又は非線形関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、画像再構成コンピュータと、
を備えている、システム。 - 1つ又は複数のプロセッサを含んでいるコンピュータによって実行可能なソフトウェアコードを格納する非一時的データストレージデバイスであって、前記ソフトウェアコードが、
観察対象の物体の密度領域内の投影空間データを受信することであって、前記投影空間データが、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ことと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算すること(ボックス205)と、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算すること(ボックス210)と、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算すること(ボックス215)と、
対応する入力ピクセル値及び参照ピクセル値に対する前記入力変換関数(f11)の反転傾斜及び前記参照変換関数(f12)の反転傾斜に基づくピクセルごとのイノベーションスケーリング行列(Z)を計算すること(ボックス220)と、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列(Z)の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算すること(ボックス220)と、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算すること(ボックス235)と、
ボクセルごとの更新スケーリング行列(L)の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算すること(ボックス240)であって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ことと、
前記変換物体ボクセル密度更新推定値及び対応する変換先行ボクセルデータ推定値に基づく変換密度推定値を計算すること(ボックス245)と、
正の制約関数(g22)を使用して前記変換密度推定値を前記変換領域から前記密度領域に逆変換し、生のボクセル密度推定データを取得する、逆変換すること(ボックス250)と、
前記生のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行し、
前記入力変換関数(f11)及び前記参照変換関数(f12)が、線形関数又は非線形関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、非一時的データストレージデバイス。 - 少なくとも1つのプロセッサを含んでいる画像再構成コンピュータによって実行される画像再構成のための方法であって、
観察対象の物体の密度領域内の投影空間データを受信するステップであって、前記投影空間データが、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ステップと、
前記密度領域内の前記1つ又は複数の入力投影ピクセル及び入力変換関数を使用して変換領域内の1つ又は複数の測定された変換ピクセルを計算するステップ(ボックス205)と、
前記密度領域内の前記1つ又は複数の予測投影空間ピクセル及び参照変換関数を使用して前記変換領域内の1つ又は複数の予測変換ピクセルを計算するステップ(ボックス210)と、
前記1つ又は複数の測定された変換ピクセルと前記1つ又は複数の予測変換ピクセルとの間の差異を使用して前記変換領域内の第1のピクセルイノベーション結果データを計算するステップ(ボックス215)と、
対応する入力ピクセル値及び参照ピクセル値に対する前記入力変換関数(f11)の反転傾斜及び前記参照変換関数(f12)の反転傾斜に基づくピクセルごとのイノベーションスケーリング行列(Z)を計算するステップ(ボックス220)と、
前記第1のピクセルイノベーション結果データと前記ピクセルごとのイノベーションスケーリング行列(Z)の対応する要素とのピクセルごとの積を使用して第2のピクセルイノベーション結果データを計算するステップ(ボックス220)と、
断層撮影再構成アルゴリズムを使用し、前記第2のピクセルイノベーション結果データに基づいて予備的変換物体更新データを計算するステップ(ボックス235)と、
ボクセルごとの更新スケーリング行列(L)の前記対応する要素を使用して前記予備的変換物体更新データをスケーリングすることによって、変換物体ボクセル密度更新推定値を計算するステップ(ボックス240)であって、前記変換物体ボクセル密度更新推定値の少なくとも1つのボクセルが、前記ボクセルごとの更新スケーリング行列の要素に関連付けられる、ステップと、
前記変換物体ボクセル密度更新推定値及び対応する変換先行ボクセルデータ推定値に基づく変換密度推定値を計算するステップ(ボックス245)と、
正の制約関数(g22)を使用して前記変換密度推定値を前記変換領域から前記密度領域に逆変換し、生のボクセル密度推定データを取得する、逆変換するステップ(ボックス250)と、
前記生のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成するステップと、
を含み、
前記入力変換関数(f11)及び前記参照変換関数(f12)が、線形関数又は非線形関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、方法。 - 投影空間情報を格納するための非一時的データストレージであって、前記投影空間情報が観察対象の物体の密度領域内にあり、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、非一時的データストレージと、
少なくとも1つのプロセッサを含んでいる画像再構成コンピュータであって、前記少なくとも1つのプロセッサが、
前記投影空間情報を前記非一時的データストレージから受信することと、
前記密度領域内の投影空間データに前記投影空間情報を変換すること(ボックス200)と、
前記密度領域内の前記1つ又は複数の入力投影ピクセル、前記投影空間データ、線形又は非線形の変換関数及び断層撮影再構成アルゴリズムを使用して予備的変換物体密度更新データを計算すること(ボックス235)と、
ボクセル密度の非線形変換のセットから得られたゲインを有するボクセルごとの更新スケーリング行列(L)と、対応する変換ボクセル密度の非線形逆変換のセットの反転傾斜とを使用して前記予備的変換物体密度更新データをスケーリングすることによって、変換物体ボクセル密度更新データを計算すること(ボックス240)と、
前記変換物体ボクセル密度更新データを、先行する反復からの変換先行ボクセルデータ推定値と累算して変換物体ボクセル密度推定値を形成する、累算すること(ボックス245)と、
正の制約関数(g22)を使用して前記変換物体ボクセル密度推定値を変換することによってボクセル密度データを計算すること(ボックス250)と、
前記ボクセル密度データを単位遅延時間だけ遅らせて、前のボクセル密度データを取得する、遅らせること(ボックス265)と、
変換物体の参照関数(f21)を使用して前記前のボクセル密度データを変換して、変換先行ボクセルデータ推定データを取得する、変換すること(ボックス290)と、
前のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行するよう機能し、
前記正の制約関数(g22)及び前記変換物体の参照関数(f21)が、相互に逆関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、画像再構成コンピュータと、
を備えている、システム。 - 前記画像再構成コンピュータが、
前記ボクセル密度データを遅らせることの前に、物体構造情報を使用して前記ボクセル密度データを再推定すること(ボックス260)
を実行するようさらに機能する、請求項32に記載のシステム。 - 前記予備的変換物体密度更新データ及び前記変換物体ボクセル密度更新データのうち少なくとも1つが、影響関数を使用して計算される、請求項32に記載のシステム。
- 前記画像再構成コンピュータが、
投影残差の近傍領域を表すか又は前記近傍領域から得られるパラメータ或いは先験的パラメータを使用してロバストな推定影響関数で前記投影残差を処理することであり、前記パラメータが、局所的な入力測定値、予測値、システムの特性、又は先験的に期待される物体及び測定の特性のうちの1つ又は複数の関数である、処理すること、
を実行するようさらに機能する、請求項32に記載のシステム。 - 前記画像再構成コンピュータが、
選択範囲上の投影残差の平滑化、又は選択範囲上の前記投影残差のスケーリングのうちの少なくとも1つによって、前記投影残差を処理すること
を実行するようさらに機能する、請求項32に記載のシステム。 - 前記予備的変換物体密度更新データが、非線形変換、ピクセルごとのイノベーションスケーリング行列、及び前記断層撮影再構成アルゴリズムに基づき計算される、請求項32に記載のシステム。
- 前記予備的変換物体密度更新データが、ピクセルごとの信号データのゲインを使用した再構成アルゴリズムに基づき計算される、請求項32に記載のシステム。
- 前記予備的変換物体密度更新データが、
ピクセルごとのイノベーションスケーリングマッチング行列、及び
対応するピクセル位置の近傍領域内の密度領域ピクセル値の非線形参照変換関数の反転傾斜と、非線形入力変換関数の反転傾斜との重み付きの組合せ
に基づき計算される、請求項32に記載のシステム。 - 前記ボクセル密度データが、前記正の制約関数を使用して前記変換物体ボクセル密度推定値を前記密度領域に逆変換することにより計算される、請求項32に記載のシステム。
- 前記ボクセル密度推定データは、(a)等しい又は増加したグリッド分解能、又は(b)等しい又は増加した密度値の分解能のうちの1つ又は複数に基づき1つ又は複数のボクセルを作成するために前記ボクセル密度データを後処理することによって計算される、請求項32に記載のシステム。
- 投影空間データが、電磁(EM)エネルギー、X線エネルギー、粒子線、赤外線エネルギー、光エネルギー、又は振動エネルギーの投影収集プロセスのうちの少なくとも1つから、或いはその他のプロセスの出力から取得される、請求項32に記載のシステム。
- 前記観察対象の物体を表す前記物体空間画像を受信する出力デバイスであって、該出力デバイスが、データストレージデバイス、表示デバイス、印刷デバイス又はコンピュータシステムのうちの少なくとも1つである、出力デバイスをさらに備える請求項32に記載のシステム。
- 前記予備的変換物体密度更新データが、非線形変換関数に基づき計算される、請求項32に記載のシステム。
- 前記非線形変換関数が、前記1つ又は複数の入力投影ピクセルの分散安定化関数である、請求項44に記載のシステム。
- 前記非線形変換の傾きが、前記非線形変換の予測の関数入力値及び先の関数入力値の近傍領域から計算される、請求項44に記載のシステム。
- 前記画像再構成コンピュータが、
先行する物体密度ボクセルの予測を使用して信頼性の低い投影空間データ又は不足している投影空間データの一部を再計算すること又は補正すること
を実行するようさらに機能する、請求項32に記載のシステム。 - 前記ボクセル密度データについての初期のボクセル密度データが、前記投影空間データに基づき推定される、請求項32に記載のシステム。
- 前記予備的変換物体密度更新データがピクセルごとのイノベーションゲイン行列に基づき計算され、
前記ピクセルごとのイノベーションゲイン行列が、連続的な非線形関数の傾き特性とピクセル及び近傍ピクセルのイノベーション結果データに基づき計算される、請求項32に記載のシステム。 - 前記予備的変換物体密度更新データが、ピクセル及び近傍ピクセルのイノベーション結果の連続的な特性を使用した直列のイノベーションゲイン行列に基づき計算される、請求項32に記載のシステム。
- 1つ又は複数のプロセッサを含んでいるコンピュータによって実行可能なソフトウェアコードを格納する非一時的データストレージデバイスであって、前記ソフトウェアコードが、
観察対象の物体の密度領域内の投影空間情報を受信することであって、前記投影空間情報が、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ことと、
前記密度領域内の投影空間データに前記投影空間情報を変換すること(ボックス200)と、
前記密度領域内の前記1つ又は複数の入力投影ピクセル、前記投影空間データ、線形又は非線形の変換関数及び断層撮影再構成アルゴリズムを使用して予備的変換物体密度更新データを計算すること(ボックス235)と、
ボクセル密度の非線形変換のセットから得られたゲインを有するボクセルごとの更新スケーリング行列(L)と、対応する変換ボクセル密度の非線形逆変換のセットの反転傾斜とを使用して前記予備的変換物体密度更新データをスケーリングすることによって、変換物体ボクセル密度更新データを計算すること(ボックス240)と、
前記変換物体ボクセル密度更新データを、先行する反復からの変換先行ボクセルデータ推定値と累算して変換物体ボクセル密度推定値を形成する、累算すること(ボックス245)と、
正の制約関数(g22)を使用して前記変換物体ボクセル密度推定値を変換することによってボクセル密度データを計算すること(ボックス250)と、
前記ボクセル密度データを単位遅延時間だけ遅らせて、前のボクセル密度データを取得する、遅らせること(ボックス265)と、
変換物体の参照関数(f21)を使用して前記前のボクセル密度データを変換して、変換先行ボクセルデータ推定データを取得する、変換すること(ボックス290)と、
前のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成することと、
を実行し、
前記正の制約関数(g22)及び前記変換物体の参照関数(f21)が、相互に逆関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、非一時的データストレージデバイス。 - 少なくとも1つのプロセッサを含んでいる画像再構成コンピュータによって実行される画像再構成のための方法であって、
観察対象の物体の密度領域内の投影空間情報を受信するステップであって、前記投影空間情報が、1つ又は複数の入力投影ピクセル及び1つ又は複数の予測投影空間ピクセルを含んでいる、ステップと、
前記密度領域内の投影空間データに前記投影空間情報を変換するステップ(ボックス200)と、
前記密度領域内の前記1つ又は複数の入力投影ピクセル、前記投影空間データ、線形又は非線形の変換関数及び断層撮影再構成アルゴリズムを使用して予備的変換物体密度更新データを計算するステップ(ボックス235)と、
ボクセル密度の非線形変換のセットから得られたゲインを有するボクセルごとの更新スケーリング行列(L)と、対応する変換ボクセル密度の非線形逆変換のセットの反転傾斜とを使用して前記予備的変換物体密度更新データをスケーリングすることによって、変換物体ボクセル密度更新データを計算するステップ(ボックス240)と、
前記変換物体ボクセル密度更新データを、先行する反復からの変換先行ボクセルデータ推定値と累算して変換物体ボクセル密度推定値を形成する、累算するステップ(ボックス245)と、
正の制約関数(g22)を使用して前記変換物体ボクセル密度推定値を変換することによってボクセル密度データを計算するステップ(ボックス250)と、
前記ボクセル密度データを単位遅延時間だけ遅らせて、前のボクセル密度データを取得する、遅らせるステップ(ボックス265)と、
変換物体の参照関数(f21)を使用して前記前のボクセル密度データを変換して、変換先行ボクセルデータ推定データを取得する、変換するステップ(ボックス290)と、
前のボクセル密度推定データを使用して、前記観察対象の物体を表す物体空間画像を再構成するステップと、
を含み、
前記正の制約関数(g22)及び前記変換物体の参照関数(f21)が、相互に逆関数であり、
前記ボクセルごとの更新スケーリング行列(L)の要素が、前記正の制約関数(g22)の反転傾斜である、方法。 - 前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値のうちの少なくとも1つが、影響関数を使用して計算される、請求項1に記載のシステム。
- 前記画像再構成コンピュータが、
フィルタを前記予測投影データに適用して、平滑化された予測投影データを取得する、適用すること(ボックス285)
を実行するようにさらに機能し、
前記1つ又は複数の予測変換ピクセルを取得するために、前記参照変換関数が、前記平滑化された予測投影データに適用される(ボックス210)、請求項4に記載のシステム。 - 前記画像再構成コンピュータが、
前記物体空間画像を再構成することの前に、物体構造情報を使用して前記生のボクセル密度推定データを再推定すること(ボックス260)
を実行するようにさらに機能する、請求項1に記載のシステム。 - 特定の反復が、統計的尺度又はコスト基準に基づいて終了可能である、請求項15に記載のシステム。
- 前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値のうちの少なくとも1つが、影響関数を使用して計算される、請求項25に記載の非一時的データストレージデバイス。
- 前記ソフトウェアコードが、
前記物体空間画像を再構成することの前に、物体構造情報を使用して前記生のボクセル密度推定データを再推定すること(ボックス260)
をさらに実行可能である、請求項25に記載の非一時的データストレージデバイス。 - 前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値のうちの少なくとも1つが、影響関数を使用して計算される、請求項26に記載の方法。
- 前記方法が、
前記物体空間画像を再構成するステップの前に、物体構造情報を使用して前記生のボクセル密度推定データを再推定するステップ(ボックス260)
をさらに含む、請求項26に記載の方法。 - 前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値のうちの少なくとも1つが、影響関数を使用して計算される、請求項29に記載のシステム。
- 前記画像再構成コンピュータが、
前記物体空間画像を再構成することの前に、物体構造情報を使用して前記生のボクセル密度推定データを再推定すること(ボックス260)
を実行するようにさらに機能する、請求項29に記載のシステム。 - 前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値のうちの少なくとも1つが、影響関数を使用して計算される、請求項30に記載の非一時的データストレージデバイス。
- 前記予備的変換物体更新データ及び前記変換物体ボクセル密度更新推定値のうちの少なくとも1つが、影響関数を使用して計算される、請求項31に記載の方法。
- 前記予備的変換物体密度更新データ及び前記変換物体ボクセル密度更新データのうちの少なくとも1つが、影響関数を使用して計算される、請求項51に記載の非一時的データストレージデバイス。
- 前記ソフトウェアコードが、
前記ボクセル密度データを遅らせることの前に、物体構造情報を使用して前記ボクセル密度データを再推定すること(ボックス260)
をさらに実行可能である、請求項51に記載の非一時的データストレージデバイス。 - 前記予備的変換物体密度更新データ及び前記変換物体ボクセル密度更新データのうちの少なくとも1つが、影響関数を使用して計算される、請求項52に記載の方法。
- 前記方法が、
前記ボクセル密度データを遅らせることの前に、物体構造情報を使用して前記ボクセル密度データを再推定するステップ(ボックス260)
をさらに含む、請求項52に記載の方法。 - 前記入力変換関数及び前記参照変換関数が、関数の同一のセットの対である、請求項1に記載のシステム。
- 前記入力変換関数及び前記参照変換関数が、関数の同一のセットの対である、請求項29に記載のシステム。
- 前記入力変換関数及び前記参照変換関数が、関数の同一のセットの対である、請求項31に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662424187P | 2016-11-18 | 2016-11-18 | |
| US62/424,187 | 2016-11-18 | ||
| US201662426065P | 2016-11-23 | 2016-11-23 | |
| US62/426,065 | 2016-11-23 | ||
| PCT/US2017/062369 WO2018094250A1 (en) | 2016-11-18 | 2017-11-17 | Extended high efficiency computed tomography with optimized recursions and applications |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019535405A JP2019535405A (ja) | 2019-12-12 |
| JP7280184B2 true JP7280184B2 (ja) | 2023-05-23 |
Family
ID=62146811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019525981A Active JP7280184B2 (ja) | 2016-11-18 | 2017-11-17 | システム、データストレージデバイスおよび方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10607378B2 (ja) |
| EP (1) | EP3526733B1 (ja) |
| JP (1) | JP7280184B2 (ja) |
| WO (1) | WO2018094250A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3413033B1 (en) * | 2017-06-09 | 2020-09-23 | Roche Diagnostics GmbH | Method and apparatus for determining properties of a laboratory sample contained in a laboratory sample container |
| US20190180481A1 (en) * | 2017-12-13 | 2019-06-13 | General Electric Company | Tomographic reconstruction with weights |
| WO2019209431A1 (en) | 2018-04-23 | 2019-10-31 | Magic Leap, Inc. | Avatar facial expression representation in multidimensional space |
| CN109190322B (zh) * | 2018-11-07 | 2023-03-24 | 桂林电子科技大学 | 一种基于温度场的电子束熔覆工艺参数优化方法及系统 |
| US11854281B2 (en) | 2019-08-16 | 2023-12-26 | The Research Foundation For The State University Of New York | System, method, and computer-accessible medium for processing brain images and extracting neuronal structures |
| JP7458750B2 (ja) * | 2019-11-13 | 2024-04-01 | キヤノン株式会社 | 画像処理装置、放射線撮影装置、画像処理方法及びプログラム |
| US12387392B2 (en) | 2020-08-04 | 2025-08-12 | Rensselaer Polytechnic Institute | Hybrid image reconstruction system |
| CN111968060B (zh) * | 2020-08-28 | 2022-07-08 | 首都师范大学 | 一种基于倾斜投影修正技术的多能谱ct快速迭代重建方法 |
| CN112636719B (zh) * | 2020-12-17 | 2023-10-13 | 郑州轻工业大学 | 数据丢失和信道噪声干扰下的ilc系统输入信号滤波方法 |
| CN116009386B (zh) * | 2022-12-20 | 2026-01-02 | 北京理工大学 | 一种基于噪声数据的未知切换系统在线控制方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011526367A (ja) | 2008-06-27 | 2011-10-06 | アール.ヤーリッシュ ウォルフラム | 高効率コンピュータ断層撮影 |
| JP2014518133A (ja) | 2011-06-30 | 2014-07-28 | アナロジック コーポレイション | 画像再構成方法とシステム{iterativeimagereconsgtruction} |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4593355A (en) | 1983-11-21 | 1986-06-03 | American Science And Engineering, Inc. | Method of quick back projection for computed tomography and improved CT machine employing the method |
| US5414623A (en) | 1992-05-08 | 1995-05-09 | Iowa State University Research Foundation | Optoelectronic system for implementation of iterative computer tomography algorithms |
| US6018562A (en) | 1995-11-13 | 2000-01-25 | The United States Of America As Represented By The Secretary Of The Army | Apparatus and method for automatic recognition of concealed objects using multiple energy computed tomography |
| US7734119B2 (en) | 2004-09-21 | 2010-06-08 | General Electric Company | Method and system for progressive multi-resolution three-dimensional image reconstruction using region of interest information |
| US7386088B2 (en) * | 2004-09-24 | 2008-06-10 | General Electric Company | Method and system for iterative image reconstruction |
| US8687869B2 (en) | 2005-11-30 | 2014-04-01 | The Research Foundation Of State Of University Of New York | System and method for acceleration of image reconstruction |
| US8571287B2 (en) | 2006-06-26 | 2013-10-29 | General Electric Company | System and method for iterative image reconstruction |
| US8897528B2 (en) | 2006-06-26 | 2014-11-25 | General Electric Company | System and method for iterative image reconstruction |
| US8175115B2 (en) | 2006-11-17 | 2012-05-08 | General Electric Company | Method and system for iterative reconstruction |
| US8660330B2 (en) | 2008-06-27 | 2014-02-25 | Wolfram Jarisch | High efficiency computed tomography with optimized recursions |
| US7852977B2 (en) | 2008-09-11 | 2010-12-14 | Samplify Systems, Inc. | Adaptive compression of computed tomography projection data |
| US9251606B2 (en) * | 2012-02-01 | 2016-02-02 | The Research Foundation For The State University Of New York | Computerized image reconstruction method and apparatus |
| US8923583B2 (en) | 2012-06-22 | 2014-12-30 | General Electric Company | Methods and systems for performing model-based iterative reconstruction |
| US9508163B2 (en) | 2013-06-14 | 2016-11-29 | General Electric Company | Accelerated iterative reconstruction |
| US9406154B2 (en) * | 2013-06-14 | 2016-08-02 | General Electric Company | Iterative reconstruction in image formation |
| JP2016536032A (ja) * | 2013-09-26 | 2016-11-24 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 電子密度画像の連結再構成 |
-
2017
- 2017-11-17 WO PCT/US2017/062369 patent/WO2018094250A1/en not_active Ceased
- 2017-11-17 JP JP2019525981A patent/JP7280184B2/ja active Active
- 2017-11-17 US US15/816,745 patent/US10607378B2/en not_active Expired - Fee Related
- 2017-11-17 EP EP17872842.4A patent/EP3526733B1/en active Active
-
2019
- 2019-11-25 US US16/694,601 patent/US10789743B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011526367A (ja) | 2008-06-27 | 2011-10-06 | アール.ヤーリッシュ ウォルフラム | 高効率コンピュータ断層撮影 |
| JP2014518133A (ja) | 2011-06-30 | 2014-07-28 | アナロジック コーポレイション | 画像再構成方法とシステム{iterativeimagereconsgtruction} |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3526733A1 (en) | 2019-08-21 |
| EP3526733A4 (en) | 2020-06-10 |
| EP3526733C0 (en) | 2024-07-24 |
| US20200090385A1 (en) | 2020-03-19 |
| US20180144515A1 (en) | 2018-05-24 |
| WO2018094250A1 (en) | 2018-05-24 |
| US10789743B2 (en) | 2020-09-29 |
| EP3526733B1 (en) | 2024-07-24 |
| US10607378B2 (en) | 2020-03-31 |
| JP2019535405A (ja) | 2019-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7280184B2 (ja) | システム、データストレージデバイスおよび方法 | |
| Würfl et al. | Deep learning computed tomography: Learning projection-domain weights from image domain in limited angle problems | |
| Sidky et al. | Constrained ${\rm T} p {\rm V} $ Minimization for Enhanced Exploitation of Gradient Sparsity: Application to CT Image Reconstruction | |
| Zhang et al. | Regularization strategies in statistical image reconstruction of low‐dose x‐ray CT: A review | |
| KR102257637B1 (ko) | 딥러닝에 기초한 단층촬영 재구성 | |
| CN107610193B (zh) | 使用深度生成式机器学习模型的图像校正 | |
| JP5543448B2 (ja) | 高効率コンピュータ断層撮影 | |
| CN103052959B (zh) | 具有优化递归的高效计算层析摄影术 | |
| CN111492406A (zh) | 使用机器学习的图像生成 | |
| US10475215B2 (en) | CBCT image processing method | |
| JP6044046B2 (ja) | 動き追従x線ct画像処理方法および動き追従x線ct画像処理装置 | |
| US10049446B2 (en) | Accelerated statistical iterative reconstruction | |
| CN106462987B (zh) | 基于投影数据集的用于体积的改进图像重构 | |
| US11672498B2 (en) | Information processing method, medical image diagnostic apparatus, and information processing system | |
| Cao et al. | Multiresolution iterative reconstruction in high-resolution extremity cone-beam CT | |
| JP2014509037A (ja) | 画像データのモデルに基づく処理 | |
| WO2023279316A1 (zh) | 一种基于去噪打分匹配网络的pet重建方法 | |
| US12205199B2 (en) | Information processing method, medical image diagnostic apparatus, and information processing system | |
| CN107004259A (zh) | 多对比度成像中的统计加权正则化 | |
| Thies et al. | A gradient-based approach to fast and accurate head motion compensation in cone-beam CT | |
| Abascal et al. | A novel prior-and motion-based compressed sensing method for small-animal respiratory gated CT | |
| CN119522440A (zh) | 医学图像的可控无参考去噪 | |
| CN121147338A (zh) | 一种基于spect数据的roi图像重建方法及系统 | |
| CN107274459B (zh) | 一种用于加快锥形束ct图像迭代重建的预条件方法 | |
| Schwab | Deep Learning Methods for Limited Data Problems in X-Ray Tomography |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190708 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20190912 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200414 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200714 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200914 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210316 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210615 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210616 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210915 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220215 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220610 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20220613 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20221220 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20230314 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20230411 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20230411 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230511 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7280184 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |