JP6767093B2 - 多指ハンド装置 - Google Patents
多指ハンド装置 Download PDFInfo
- Publication number
- JP6767093B2 JP6767093B2 JP2015049911A JP2015049911A JP6767093B2 JP 6767093 B2 JP6767093 B2 JP 6767093B2 JP 2015049911 A JP2015049911 A JP 2015049911A JP 2015049911 A JP2015049911 A JP 2015049911A JP 6767093 B2 JP6767093 B2 JP 6767093B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- finger
- motor
- hand
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Description
「複数の指部を備える手部、該手部を支持する腕部、及び、前記手部を前記腕部に連結している手首構造を備える多指ハンド装置であって、
前記手首構造は、
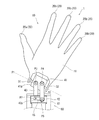
前記手部の両外側の端部から、それぞれ前記腕部に向かって突出している一対の手首突片と、
一対の前記手首突片の間に位置し、軸心が第一軸であるモータ回転軸が前記手首突片の少なくとも一方に固定されている第一モータと、
軸心が第二軸であるモータ回転軸が前記第一軸と直角をなすように、前記腕部に固定されている第二モータと、
前記第二軸に一端が固定されており、前記第二モータの正逆回転によって回動する回動バーと、
一端が前記腕部に固定されていると共に、他端が前記第一モータのケーシングに前記第二軸に平行な第三軸によって軸支されており、前記第一モータを前記第三軸周りに回動自在に支持している固定バーと、
一端が前記第三軸と平行な第四軸によって前記第一モータのケーシングに回動自在に軸支されていると共に、他端が第五軸によって前記回動バーの他端に回動自在に軸支されている伝達バーとを具備し、
前記第一モータの正逆回転によって、前記手首突片を前記第一軸周りに回動させることにより前記手部を掌屈及び背屈させ、
前記第二モータの正逆回転による前記回動バーの前記第二軸周りの回動が前記伝達バーを介して伝達され、前記第四軸が前記第三軸周りに回動することによって、前記第一モータを前記第一軸に直角な前記第三軸周りに回動させ、これに伴い前記手部を橈屈及び尺屈させる」ものである。
「それぞれの前記指部は、
ヒンジ部によって回動自在に連結された複数の指節部からなり、
指先の近傍から指腹に沿って案内された一本のワイヤを備えると共に、
前記ヒンジ部に介設されたねじりコイルバネによって伸長方向に付勢されており、
前記腕部には、正逆回転により前記ワイヤを牽引し又は弛緩させる指部屈伸用モータが配されている」ものとすることができる。
10 手部
20 指部
31,32 手首突片
41 第一モータ
41p モータ回転軸
42 第二モータ
42p モータ回転軸
43 固定バー
44 伝達バー
45 回動バー
50 指節部
52 ヒンジ部
53 ねじりコイルバネ
60 腕部
P1 第一軸
P2 第二軸
P3 第三軸
P4 第四軸
P5 第五軸
Claims (3)
- 複数の指部を備える手部、該手部を支持する腕部、及び、前記手部を前記腕部に連結している手首構造を備える多指ハンド装置であって、
前記手首構造は、
前記手部の両外側の端部から、それぞれ前記腕部に向かって突出している一対の手首突片と、
一対の前記手首突片の間に位置し、軸心が第一軸であるモータ回転軸が前記手首突片の少なくとも一方に固定されている第一モータと、
軸心が第二軸であるモータ回転軸が前記第一軸と直角をなすように、前記腕部に固定されている第二モータと、
前記第二軸に一端が固定されており、前記第二モータの正逆回転によって回動する回動バーと、
一端が前記腕部に固定されていると共に、他端が前記第一モータのケーシングに前記第二軸に平行な第三軸によって軸支されており、前記第一モータを前記第三軸周りに回動自在に支持している固定バーと、
一端が前記第三軸と平行な第四軸によって前記第一モータのケーシングに回動自在に軸支されていると共に、他端が第五軸によって前記回動バーの他端に回動自在に軸支されている伝達バーとを具備し、
前記第一モータの正逆回転によって、前記手首突片を前記第一軸周りに回動させることにより前記手部を掌屈及び背屈させ、
前記第二モータの正逆回転による前記回動バーの前記第二軸周りの回動が前記伝達バーを介して伝達され、前記第四軸が前記第三軸周りに回動することによって、前記第一モータを前記第一軸に直角な前記第三軸周りに回動させ、これに伴い前記手部を橈屈及び尺屈させるものである
ことを特徴とする多指ハンド装置。 - 前記第三軸の延長線は前記第一軸を通る
ことを特徴とする請求項1に記載の多指ハンド装置。 - それぞれの前記指部は、
ヒンジ部によって回動自在に連結された複数の指節部からなり、
指先の近傍から指腹に沿って案内された一本のワイヤを備えると共に、
前記ヒンジ部に介設されたねじりコイルバネによって伸長方向に付勢されており、
前記腕部には、正逆回転により前記ワイヤを牽引し又は弛緩させる指部屈伸用モータが配されている
ことを特徴とする請求項1または請求項2に記載の多指ハンド装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015049911A JP6767093B2 (ja) | 2015-03-12 | 2015-03-12 | 多指ハンド装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015049911A JP6767093B2 (ja) | 2015-03-12 | 2015-03-12 | 多指ハンド装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016168645A JP2016168645A (ja) | 2016-09-23 |
| JP2016168645A5 JP2016168645A5 (ja) | 2018-12-20 |
| JP6767093B2 true JP6767093B2 (ja) | 2020-10-14 |
Family
ID=56982994
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015049911A Active JP6767093B2 (ja) | 2015-03-12 | 2015-03-12 | 多指ハンド装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6767093B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101861445B1 (ko) | 2016-11-10 | 2018-05-25 | 한양대학교 에리카산학협력단 | 의수 및 의수의 동작 방법 |
| JP6867211B2 (ja) * | 2017-03-30 | 2021-04-28 | ダブル技研株式会社 | 人間型ハンドにおける手首の回転構造、ハンドにおける手首の回転構造およびハンド |
| JPWO2021145290A1 (ja) * | 2020-01-14 | 2021-07-22 | ||
| CN112873269B (zh) * | 2021-04-29 | 2021-06-29 | 广东寻米科技有限公司 | 一种腕部结构及机器人 |
| CN113878603B (zh) * | 2021-10-20 | 2022-07-19 | 上海清芸机器人有限公司 | 仿人机器人手掌结构 |
| WO2023228540A1 (ja) * | 2022-05-23 | 2023-11-30 | 国立大学法人京都工芸繊維大学 | ロボットハンド |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2002353941A1 (en) * | 2001-10-31 | 2003-05-12 | Ross-Hime Designs, Incoporated | Robotic manipulator |
| JP2003170381A (ja) * | 2001-11-30 | 2003-06-17 | Seiko Epson Corp | 操作装置 |
| JP2004029999A (ja) * | 2002-06-24 | 2004-01-29 | Matsushita Electric Ind Co Ltd | 力触覚ディスプレイハンドおよびその製造方法 |
| JP2005349545A (ja) * | 2004-06-14 | 2005-12-22 | Sony Corp | ロボット、ロボットの頭部、ロボットの動作制御方法、記録媒体、およびプログラム |
| JP4589712B2 (ja) * | 2004-12-14 | 2010-12-01 | 本田技研工業株式会社 | ロボットの関節構造 |
| JP5289179B2 (ja) * | 2009-05-14 | 2013-09-11 | 本田技研工業株式会社 | ロボットハンドならびにその制御システム、制御方法および制御プログラム |
| US8498741B2 (en) * | 2009-09-22 | 2013-07-30 | Gm Global Technology Operations | Dexterous humanoid robotic wrist |
| JP5921225B2 (ja) * | 2011-07-20 | 2016-05-24 | 株式会社岩田鉄工所 | 多指ハンド装置 |
| JP5722747B2 (ja) * | 2011-10-24 | 2015-05-27 | Thk株式会社 | ロボットの関節構造及びこの関節構造が組み込まれたロボット |
| JP6108529B2 (ja) * | 2013-03-07 | 2017-04-05 | セイコーエプソン株式会社 | ロボットハンド及びロボット装置 |
-
2015
- 2015-03-12 JP JP2015049911A patent/JP6767093B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016168645A (ja) | 2016-09-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6767093B2 (ja) | 多指ハンド装置 | |
| JP5921225B2 (ja) | 多指ハンド装置 | |
| EP2056752B1 (en) | Strengthening glove | |
| US8052185B2 (en) | Robot hand with humanoid fingers | |
| US11123879B2 (en) | Finger mechanism and humanoid hand incorporating same finger mechanism | |
| CN101511310B (zh) | 加强手套 | |
| JP5924642B2 (ja) | リハビリテーション支援装置 | |
| EP2732937A1 (en) | Robotic hand and robot | |
| KR20170056722A (ko) | 착용형 손 로봇 | |
| WO2005032771A1 (ja) | ロボットハンド | |
| KR20170007351A (ko) | 휴머노이드 로봇에 제공된 손의 구동 | |
| KR101610745B1 (ko) | 로봇 손가락 구조체 | |
| WO2023207737A1 (zh) | 线驱软体手套 | |
| JP7213497B2 (ja) | 指動作支援装置 | |
| JP6934659B2 (ja) | 動作検出装置 | |
| KR101904990B1 (ko) | 재활로봇 손잡이 및 이를 구비한 재활로봇 | |
| KR101034203B1 (ko) | 로봇핸드 및 이를 갖춘 인간형 로봇 | |
| JP2014213199A (ja) | 可動指を持つ義手 | |
| CN213099143U (zh) | 一种五指抓握康复训练机器人 | |
| JP7341505B2 (ja) | ロボットハンド | |
| JP7289541B2 (ja) | ロボットハンド | |
| JP3184390U (ja) | 手指訓練用装具 | |
| KR102434037B1 (ko) | 손 구조물에 탈착 가능한 웨어러블 로봇 손 장치 | |
| JP2018073190A (ja) | 装着装置 | |
| Norman et al. | Design of a wearable robot to enable bimanual manipulation after stroke |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A80 | Written request to apply exceptions to lack of novelty of invention |
Free format text: JAPANESE INTERMEDIATE CODE: A80 Effective date: 20150323 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20181107 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191112 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200210 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200603 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200630 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20200804 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20200911 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20200917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200917 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6767093 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |