JP6397368B2 - 次焦点選択装置、方法、及びプログラム - Google Patents
次焦点選択装置、方法、及びプログラム Download PDFInfo
- Publication number
- JP6397368B2 JP6397368B2 JP2015100141A JP2015100141A JP6397368B2 JP 6397368 B2 JP6397368 B2 JP 6397368B2 JP 2015100141 A JP2015100141 A JP 2015100141A JP 2015100141 A JP2015100141 A JP 2015100141A JP 6397368 B2 JP6397368 B2 JP 6397368B2
- Authority
- JP
- Japan
- Prior art keywords
- focus
- node
- path
- row
- thesaurus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
Description
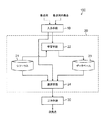
<第1の実施の形態に係る次焦点選択装置の構成>
学習手段22は、まず予め定められた数としてn(但し、n≧2)を一つ定める。
選択手段24は、該焦点列の末尾のn−1個の焦点ノードの番号をi,i+1,・・・,i+n−2とする。第1の実施の形態の構成では、i番目の焦点ノードのルートノードからの深さを取得する。後述する第2の実施の形態の構成では、この値を取得しない。
図5及び図6は、次焦点選択装置の学習処理フローの一例である。図5及び図6に沿って、次焦点選択装置の学習処理の処理内容を説明する。
<第2の実施の形態に係る次焦点選択装置の構成>
次に、本発明の第2の実施の形態について説明する。なお、第2の実施の形態に係る次焦点選択装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
20 演算手段
21 シソーラス
22 学習手段
23 データベース
24 選択手段
30 出力手段
100 次焦点選択装置
Claims (5)
- シソーラスと、
発話列における焦点の列である焦点列の集合を入力とし、焦点列における各焦点を前記シソーラス上のノードに変換し、焦点列におけるi番目の焦点ノードのルートノードからの深さ、及び、j番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列毎に、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスと、前記パスの出現頻度の割合である確率値を算出し記憶手段に格納する学習手段と、
発話列における焦点の列である焦点列を入力とし、該焦点列における各焦点を前記シソーラス上のノードに変換し、該焦点列の末尾のn−1個の焦点ノードの番号をi,i+1,・・・,i+n−2としたとき、前記記憶手段内の、i番目の焦点ノードのルートノードからの深さ、及び、j番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列に対応する、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスAの確率値に応じた頻度で、i+n−2番目の焦点ノードから該パスAだけ離れた焦点ノードを選択し、選択した焦点ノードに対応する焦点を出力する選択手段と
を含むことを特徴とする次焦点選択装置。 - シソーラスと、
発話列における焦点の列である焦点列の集合を入力とし、焦点列における各焦点を前記シソーラス上のノードに変換し、焦点列におけるj番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列毎に、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスと、前記パスの出現頻度の割合である確率値を算出し記憶手段に格納する学習手段と、
発話列における焦点の列である焦点列を入力とし、該焦点列における各焦点を前記シソーラス上のノードに変換し、該焦点列の末尾のn−1個の焦点ノードの番号をi,i+1,・・・,i+n−2としたとき、前記記憶手段内の、j番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列に対応する、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスAの確率値に応じた頻度で、i+n−2番目の焦点ノードから該パスAだけ離れた焦点ノードを選択し、選択した焦点ノードに対応する焦点を出力する選択手段と
を含むことを特徴とする次焦点選択装置。 - シソーラスと、学習手段と、選択手段とを含む次焦点選択装置における次焦点選択方法であって、
前記学習手段が、発話列における焦点の列である焦点列の集合を入力とし、焦点列における各焦点を前記シソーラス上のノードに変換し、焦点列におけるi番目の焦点ノードのルートノードからの深さ、及び、j番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列毎に、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスと、前記パスの出現頻度の割合である確率値を算出し記憶手段に格納し、
前記選択手段が、発話列における焦点の列である焦点列を入力とし、該焦点列における各焦点を前記シソーラス上のノードに変換し、該焦点列の末尾のn−1個の焦点ノードの番号をi,i+1,・・・,i+n−2としたとき、前記記憶手段内の、i番目の焦点ノードのルートノードからの深さ、及び、j番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列に対応する、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスAの確率値に応じた頻度で、i+n−2番目の焦点ノードから該パスAだけ離れた焦点ノードを選択し、選択した焦点ノードに対応する焦点を出力する
次焦点選択方法。 - シソーラスと、学習手段と、選択手段とを含む次焦点選択装置における次焦点選択方法であって、
前記学習手段が、発話列における焦点の列である焦点列の集合を入力とし、焦点列における各焦点を前記シソーラス上のノードに変換し、焦点列におけるj番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列毎に、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスと、前記パスの出現頻度の割合である確率値を算出し記憶手段に格納し、
前記選択手段が、発話列における焦点の列である焦点列を入力とし、該焦点列における各焦点を前記シソーラス上のノードに変換し、該焦点列の末尾のn−1個の焦点ノードの番号をi,i+1,・・・,i+n−2としたとき、前記記憶手段内の、j番目(但し、i≦j≦i+n−3であり、nは3以上の整数である)の焦点ノードからj+1番目の焦点ノードへのパスを順に並べたパス系列に対応する、i+n−2番目の焦点ノードからi+n−1番目の焦点ノードへのパスAの確率値に応じた頻度で、i+n−2番目の焦点ノードから該パスAだけ離れた焦点ノードを選択し、選択した焦点ノードに対応する焦点を出力する
次焦点選択方法。 - コンピュータを、請求項1又は請求項2に記載の次焦点選択装置を構成する各手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015100141A JP6397368B2 (ja) | 2015-05-15 | 2015-05-15 | 次焦点選択装置、方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015100141A JP6397368B2 (ja) | 2015-05-15 | 2015-05-15 | 次焦点選択装置、方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016218565A JP2016218565A (ja) | 2016-12-22 |
| JP6397368B2 true JP6397368B2 (ja) | 2018-09-26 |
Family
ID=57581059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015100141A Active JP6397368B2 (ja) | 2015-05-15 | 2015-05-15 | 次焦点選択装置、方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6397368B2 (ja) |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008310784A (ja) * | 2007-06-13 | 2008-12-25 | Shinichiro Okude | 意味的ネットワークをベースとして用いる対話装置、対話プログラム、及び対話プログラムを記録した記録媒体 |
-
2015
- 2015-05-15 JP JP2015100141A patent/JP6397368B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016218565A (ja) | 2016-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Henderson et al. | The third dialog state tracking challenge | |
| CN112633010B (zh) | 基于多头注意力和图卷积网络的方面级情感分析方法及系统 | |
| KR102353284B1 (ko) | 신경망을 사용하여 오디오 생성 | |
| US12475378B2 (en) | Neural transformer code completion for command line interface | |
| US11068655B2 (en) | Text recognition based on training of models at a plurality of training nodes | |
| JP6733809B2 (ja) | 情報処理システム、情報処理装置、情報処理方法および情報処理プログラム | |
| JP7060010B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| CN114579605A (zh) | 表格问答数据处理方法、电子设备及计算机存储介质 | |
| CN106411683B (zh) | 一种关键社交信息的确定方法及装置 | |
| JP3428554B2 (ja) | 意味ネットワーク自動作成装置及びコンピュータ可読記録媒体 | |
| CN106503066B (zh) | 基于人工智能的处理搜索结果方法和装置 | |
| US20050216265A1 (en) | Representation of a deleted interpolation N-gram language model in ARPA standard format | |
| JP2006243728A (ja) | 音素をテキストに変換する方法、そのコンピュータシステム、及びコンピュータプログラム | |
| CN109657060B (zh) | 安全生产事故案例推送方法及系统 | |
| JP5766152B2 (ja) | 言語モデル生成装置、その方法及びプログラム | |
| JP5851378B2 (ja) | 時系列データ探索方法、装置、及びプログラム | |
| US20020156628A1 (en) | Speech recognition system, training arrangement and method of calculating iteration values for free parameters of a maximum-entropy speech model | |
| JP6397368B2 (ja) | 次焦点選択装置、方法、及びプログラム | |
| JP6261669B2 (ja) | クエリ校正システムおよび方法 | |
| JP2015225416A (ja) | モデル学習装置、ランキング装置、方法、及びプログラム | |
| JP6126965B2 (ja) | 発話生成装置、方法、及びプログラム | |
| JP6698061B2 (ja) | 単語ベクトル変換装置、方法、及びプログラム | |
| Emad et al. | Poisson group testing: A probabilistic model for boolean compressed sensing | |
| JP2004046775A (ja) | 固有表現抽出装置及び方法並びに固有表現抽出プログラム | |
| JP5744150B2 (ja) | 発話生成装置、方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180619 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180817 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180828 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180831 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6397368 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |