JP6303975B2 - 障害物警報装置 - Google Patents
障害物警報装置 Download PDFInfo
- Publication number
- JP6303975B2 JP6303975B2 JP2014215717A JP2014215717A JP6303975B2 JP 6303975 B2 JP6303975 B2 JP 6303975B2 JP 2014215717 A JP2014215717 A JP 2014215717A JP 2014215717 A JP2014215717 A JP 2014215717A JP 6303975 B2 JP6303975 B2 JP 6303975B2
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- vehicle
- alarm
- range
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 227
- 230000008859 change Effects 0.000 claims description 27
- 238000012545 processing Methods 0.000 claims description 13
- 238000000034 method Methods 0.000 description 27
- 230000008569 process Effects 0.000 description 21
- 238000012544 monitoring process Methods 0.000 description 19
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 238000011156 evaluation Methods 0.000 description 7
- 230000037237 body shape Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9323—Alternative operation using light waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9324—Alternative operation using ultrasonic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/937—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details
- G01S2015/938—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles sensor installation details in the bumper area
Description
以上の構成では、警報要否判定部F3が、ある検出点Dpに基づいて警報を実施する必要があると判定している状況において、重なり判定部が自車両10とその検出点Dp又はその関連検出点Dpの少なくとも何れか1つと重なっていると判定した場合には、警報要否判定部F3は、当該警報を実施する必要が無いと判定する。すなわち、重なり判定部F5の判定結果は、警報をキャンセルさせる効果を有する。
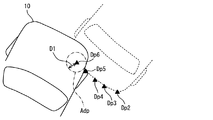
また、変形例1における重なり判定部F5は、より好ましい態様として、検出点Dpの検出誤差を考慮して、検出点Dpと自車両10とが重なっているか否かを判定する。この変形例1における重なり判定部F5の作動について、図6を用いて説明する。
また、前述の変形例1では、検出点Dpの検出誤差を考慮しつつ、検出点Dpと自車両10とが重なっているか否かを判定する態様として、検出点Dpに対する検出誤差範囲Adpを用いる態様を例示したがこれに限らない。
さらに、検出結果管理部F2が障害物の輪郭形状を特定し、さらに、障害物が存在する範囲を特定している場合には、重なり判定部F5は、その障害物が存在する範囲と、自車範囲とが重なっている部分の大きさに基づいて、上記判定を行っても良い。例えば重なり判定部F5は、障害物が存在する範囲と、自車範囲とが重なっている部分の車幅方向長さ(又は車両前後方向長さ)が、誤差評価距離D1以上となった場合に、自車範囲が障害物の存在する範囲と重なっていると判定してもよい。
以上では、障害物センサ2は、自車両10の側方に検出範囲を形成するものを想定した態様を例示したが、これに限らない。障害物センサ2は、自車両10の前方や後方に存在する障害物を検出するものであっても良い。
Claims (6)
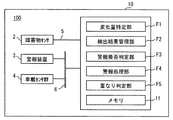
- 自車両(10)で用いられ、
自車両の周辺の障害物を検出する障害物センサ(2)での検出結果に基づいて、自車両に対する前記障害物の位置を特定する障害物位置特定部(F2)と、
前記障害物位置特定部が特定した前記障害物の位置に基づいて、前記障害物の存在を知らせる警報を実施する必要があるか否かを判定する警報要否判定部(F3)と、
前記警報要否判定部が、前記警報を実施する必要が有ると判定している場合に、前記警報をドライバに向けて行わせる警報処理部(F4)と、
前記障害物位置特定部で特定した前記障害物の位置に基づいて、前記障害物の存在する範囲と、自車両が存在する範囲である自車範囲とが重なっているか否かを判定する重なり判定部(F5)と、
自車両の位置の変化量を特定する変化量特定部(F1)と、を備え、
前記障害物位置特定部が特定する前記障害物の位置は、その障害物の一点(以降、検出点)の位置を表すものであり、
前記障害物位置特定部は、前記障害物センサでの検出結果に基づいて特定した、自車両に対する前記検出点の位置をメモリ(11)に格納するとともに、前記変化量特定部が特定する自車両の位置の前記変化量に応じて、前記メモリに格納している前記検出点の位置を更新することで現在の自車両に対する前記障害物の相対位置を逐次特定し、
前記重なり判定部は、前記メモリに格納されている前記検出点の位置が前記自車範囲内に存在することに基づいて、前記自車範囲が前記障害物の存在する範囲と重なっていると判定し、
前記警報要否判定部は、
前記重なり判定部が、前記自車範囲が前記障害物の存在する範囲と重なっていると判定した場合には、その障害物についての前記警報を実施する必要が無いと判定することを特徴とする障害物警報装置。 - 請求項1において、
前記重なり判定部は、
前記障害物位置特定部によって特定されている前記障害物の位置と、その障害物が実際に存在する位置との誤差を推定し、
前記障害物位置特定部によって特定されている前記障害物が存在する範囲と、前記自車範囲とが重なっている部分の、車幅方向長さ又は車両前後方向長さが、前記誤差以上となった場合に、前記自車範囲が前記障害物の存在する範囲と重なっていると判定することを特徴とする障害物警報装置。 - 請求項1又は2において、
前記重なり判定部は、
前記障害物位置特定部で特定した前記障害物の位置を基準として、その障害物が実際に存在しうる範囲である検出誤差範囲を算出し、
前記検出誤差範囲全体が前記自車範囲と重なった場合に、前記自車範囲が前記障害物の存在する範囲と重なっていると判定することを特徴とする障害物警報装置。 - 請求項1又は2において、
前記重なり判定部は、
前記障害物位置特定部で特定されている前記検出点の位置が、前記自車範囲の外郭よりも所定距離以上内側に位置する場合に、前記自車範囲が前記障害物の存在する範囲と重なっていると判定することを特徴とする障害物警報装置。 - 請求項1から4の何れか1項において、
前記障害物位置特定部は、前記メモリに格納されている複数の前記検出点が、同一の前記障害物に対する検出結果であるか否かを判定し、その判定の結果、それらの検出点が同一の前記障害物に対する検出結果であると判定した場合には、それら複数の検出点を互いに関連付けて保存し、
前記警報要否判定部は、前記メモリに格納されている前記検出点の自車両に対する位置が、前記警報を実施する必要があると判定するための警報条件を満たしている場合に、その検出点についての前記警報を実施する必要があると判定するものであって、
さらに、前記警報要否判定部は、前記重なり判定部によって、互いに関連付けられている複数の前記検出点のうちの少なくとも1つに基づいて前記自車範囲が前記障害物の存在する範囲と重なっていると判定された場合には、その関連付けられている全ての前記検出点については、前記警報は実施する必要はないと判定することを特徴とする障害物警報装置。 - 請求項1から5の何れか1項において、
前記障害物センサは、自車両の側方に存在する障害物を検出するものであって、
前記障害物位置特定部は、前記障害物センサの検出結果に基づいて自車両の側方に存在する前記障害物の位置を特定することを特徴とする障害物警報装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014215717A JP6303975B2 (ja) | 2014-10-22 | 2014-10-22 | 障害物警報装置 |
| US15/520,046 US9953532B2 (en) | 2014-10-22 | 2015-10-21 | Obstacle warning apparatus |
| DE112015004817.0T DE112015004817B4 (de) | 2014-10-22 | 2015-10-21 | Hinderniswarnvorrichtung |
| PCT/JP2015/005306 WO2016063535A1 (ja) | 2014-10-22 | 2015-10-21 | 障害物警報装置 |
| CN201580054943.5A CN106796758B (zh) | 2014-10-22 | 2015-10-21 | 障碍物警报装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014215717A JP6303975B2 (ja) | 2014-10-22 | 2014-10-22 | 障害物警報装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016085486A JP2016085486A (ja) | 2016-05-19 |
| JP2016085486A5 JP2016085486A5 (ja) | 2016-11-10 |
| JP6303975B2 true JP6303975B2 (ja) | 2018-04-04 |
Family
ID=55760594
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014215717A Active JP6303975B2 (ja) | 2014-10-22 | 2014-10-22 | 障害物警報装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9953532B2 (ja) |
| JP (1) | JP6303975B2 (ja) |
| CN (1) | CN106796758B (ja) |
| DE (1) | DE112015004817B4 (ja) |
| WO (1) | WO2016063535A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6292097B2 (ja) | 2014-10-22 | 2018-03-14 | 株式会社デンソー | 側方測距センサ診断装置 |
| JP6413621B2 (ja) | 2014-10-22 | 2018-10-31 | 株式会社デンソー | 車載用物体判別装置 |
| JP2017217933A (ja) * | 2016-06-03 | 2017-12-14 | アイシン精機株式会社 | 車高調整装置 |
| JP2018197059A (ja) * | 2017-05-24 | 2018-12-13 | トヨタ自動車株式会社 | 衝突回避制御装置 |
| WO2019073525A1 (ja) * | 2017-10-10 | 2019-04-18 | 日産自動車株式会社 | 運転制御方法及び運転制御装置 |
| CN108454553A (zh) * | 2017-12-20 | 2018-08-28 | 安徽云森物联网科技有限公司 | 一种基于人眼视觉识别技术实现障碍物检测技术 |
| JP7018330B2 (ja) * | 2018-02-15 | 2022-02-10 | 本田技研工業株式会社 | 車両制御装置 |
| CN108545115A (zh) * | 2018-05-25 | 2018-09-18 | 武汉科技大学 | 车辆侧向防撞方法及系统 |
| JP7283130B2 (ja) * | 2019-02-28 | 2023-05-30 | トヨタ自動車株式会社 | フォースリミッタ制御システム |
| TWI726404B (zh) * | 2019-09-02 | 2021-05-01 | 為升電裝工業股份有限公司 | 車輛雷達裝置及其系統 |
| KR20220026938A (ko) * | 2020-08-26 | 2022-03-07 | 현대모비스 주식회사 | 차량의 후측방 경고 시스템 및 방법 |
| CN113850972A (zh) * | 2021-09-22 | 2021-12-28 | 南京问度智能物联有限公司 | 基于电网安全的工程机械设备智能预警方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003114276A (ja) | 2001-10-03 | 2003-04-18 | Denso Corp | 障害物検知装置 |
| JP4089674B2 (ja) * | 2004-09-29 | 2008-05-28 | 株式会社デンソー | 接触脱輪回避ナビゲーションシステム |
| JP4816166B2 (ja) * | 2006-03-14 | 2011-11-16 | マツダ株式会社 | シートベルト制御装置 |
| CN101536057B (zh) * | 2006-09-29 | 2011-03-02 | 爱信精机株式会社 | 车辆用警报装置及车辆用警报方法 |
| JP4412337B2 (ja) * | 2007-03-08 | 2010-02-10 | トヨタ自動車株式会社 | 周囲環境推定装置及び周囲環境推定システム |
| JP4321643B2 (ja) * | 2007-08-10 | 2009-08-26 | トヨタ自動車株式会社 | 周辺監視装置 |
| JP4971227B2 (ja) | 2008-03-25 | 2012-07-11 | パナソニック株式会社 | 車両用障害物監視装置 |
| JP2010223918A (ja) * | 2009-03-25 | 2010-10-07 | Denso Corp | 障害物検知装置 |
| JP5338801B2 (ja) | 2010-12-23 | 2013-11-13 | 株式会社デンソー | 車載障害物情報報知装置 |
| DE102011010865A1 (de) * | 2011-02-10 | 2012-03-08 | Daimler Ag | Fahrzeug mit einer Vorrichtung zur Erfassung einer Fahrzeugumgebung |
| JP2013020458A (ja) | 2011-07-12 | 2013-01-31 | Daihatsu Motor Co Ltd | 車載用物体判別装置 |
| KR101916467B1 (ko) * | 2012-10-30 | 2018-11-07 | 현대자동차주식회사 | Avm 시스템의 장애물 검출 장치 및 방법 |
| JP2014215717A (ja) | 2013-04-23 | 2014-11-17 | 富士通株式会社 | 電子回路 |
| JP6292097B2 (ja) | 2014-10-22 | 2018-03-14 | 株式会社デンソー | 側方測距センサ診断装置 |
| JP6336886B2 (ja) * | 2014-10-22 | 2018-06-06 | 株式会社デンソー | 物体検知装置 |
| JP6413621B2 (ja) | 2014-10-22 | 2018-10-31 | 株式会社デンソー | 車載用物体判別装置 |
-
2014
- 2014-10-22 JP JP2014215717A patent/JP6303975B2/ja active Active
-
2015
- 2015-10-21 CN CN201580054943.5A patent/CN106796758B/zh active Active
- 2015-10-21 US US15/520,046 patent/US9953532B2/en active Active
- 2015-10-21 WO PCT/JP2015/005306 patent/WO2016063535A1/ja active Application Filing
- 2015-10-21 DE DE112015004817.0T patent/DE112015004817B4/de active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE112015004817B4 (de) | 2023-06-22 |
| JP2016085486A (ja) | 2016-05-19 |
| WO2016063535A1 (ja) | 2016-04-28 |
| CN106796758B (zh) | 2019-07-26 |
| US9953532B2 (en) | 2018-04-24 |
| US20170352270A1 (en) | 2017-12-07 |
| CN106796758A (zh) | 2017-05-31 |
| DE112015004817T5 (de) | 2017-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6303975B2 (ja) | 障害物警報装置 | |
| JP5962706B2 (ja) | 運転支援装置 | |
| JP6500887B2 (ja) | 車両用注意喚起装置 | |
| JP6123133B2 (ja) | 車両用障害物検知装置および、車両用障害物検知システム | |
| JP6484000B2 (ja) | 物体検知装置 | |
| JP4957747B2 (ja) | 車両環境推定装置 | |
| JP6413621B2 (ja) | 車載用物体判別装置 | |
| US20150353078A1 (en) | Driving assistance apparatus | |
| JP6474228B2 (ja) | 物体検知装置 | |
| JP6430777B2 (ja) | 物体検知装置 | |
| JP2018180908A (ja) | 注意喚起装置 | |
| WO2016063534A1 (ja) | 側方測距センサ診断装置 | |
| JP4042579B2 (ja) | 車両用障害物検出警報システム | |
| JP6442225B2 (ja) | 物体検知装置 | |
| JP6500724B2 (ja) | 危険情報報知システム、サーバ及びコンピュータプログラム | |
| JP2017151726A (ja) | 衝突予測装置 | |
| JP6375867B2 (ja) | 車載用物体判別装置 | |
| US20220230446A1 (en) | Vehicle periphery monitoring device and vehicle periphery monitoring method | |
| GB2548465A (en) | Method and device for driver assistance | |
| JP5178652B2 (ja) | 車両の走行安全装置 | |
| KR20180007211A (ko) | 차량의 후방 추돌경보시스템 | |
| JP2021140537A (ja) | センシングシステム | |
| JP5104604B2 (ja) | 衝突判断装置 | |
| JP2016085484A (ja) | 車載用物体判別装置 | |
| JP7272228B2 (ja) | 車両用運転支援装置及び車両用運転支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6303975 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |