JP6213408B2 - エレベータの群管理システム - Google Patents
エレベータの群管理システム Download PDFInfo
- Publication number
- JP6213408B2 JP6213408B2 JP2014143350A JP2014143350A JP6213408B2 JP 6213408 B2 JP6213408 B2 JP 6213408B2 JP 2014143350 A JP2014143350 A JP 2014143350A JP 2014143350 A JP2014143350 A JP 2014143350A JP 6213408 B2 JP6213408 B2 JP 6213408B2
- Authority
- JP
- Japan
- Prior art keywords
- elevator
- speed
- destination floor
- floor
- destination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Description
制御装置は、
行先階登録装置で新たな行先階呼びが登録されたときに、
複数台のエレベータのそれぞれについて、
新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータにおいて登録されている各行先階に順次停車させながら最も上方の行先階まで上昇運転させる過程で、所定の速度アップ運転条件を満たす走行区間が存在するか否かの第1の判断を行い、
第1の判断において所定の速度アップ運転条件を満たす走行区間が存在するエレベータが存在する場合、当該エレベータの中から割当エレベータを決定し、決定した割当エレベータに対して、所定の速度アップ運転条件を満たす走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせ、
第1の判断において所定の速度アップ運転条件を満たすエレベータが存在しない場合、
複数台のエレベータのそれぞれについて、
新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータについて登録されている行先階のうち最も上方の行先階まで無停止で上昇運転させ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、所定の速度アップ運転条件が成立するか否かの第2の判断を行い、
第2の判断において、無停止上昇運転の走行区間において所定の速度アップ運転条件を満たすエレベータが存在する場合、当該エレベータの中から割当エレベータを決定し、決定した割当エレベータに対して、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
制御装置は、
行先階登録装置で新たな行先階呼びが登録されたときに、
複数台のエレベータのそれぞれについて、
新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータについて登録されている行先階のうち最も上方の行先階まで無停止で上昇運転させ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、所定の速度アップ運転条件が成立するか否かの判断を行い、
判断において、無停止上昇運転の走行区間において所定の速度アップ運転条件を満たすエレベータが存在する場合、当該エレベータの中から割当エレベータを決定し、決定した割当エレベータに対して、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
制御装置は、
行先階登録装置で新たな行先階呼びが登録されたときに、
新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータについて登録されている各行先階に順次停車させながら最も上方の行先階まで上昇運転させる過程で、所定の速度アップ運転条件を満たす走行区間が存在するか否かの第1の判断を行い、
第1の判断において所定の速度アップ運転条件を満たす走行区間が存在するときは、所定の速度アップ運転条件を満たす走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせ、
第1の判断において所定の速度アップ運転条件を満たす走行区間が存在しないときは、
新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、登録されている行先階のうち最も上方の行先階まで無停止で上昇運転を行わせ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、所定の速度アップ運転条件が成立するか否かの第2の判断を行い、
第2の判断において所定の速度アップ運転条件が成立すると判定したときは、当該エレベータを、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
制御装置は、
行先階登録装置で新たな行先階呼びが登録されたときに、
新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、登録されている行先階のうち最も上方の行先階まで無停止で上昇運転を行わせ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、所定の速度アップ運転条件が成立するか否かの判断を行い、
判断において所定の速度アップ運転条件が成立すると判定したときは、当該エレベータを、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
1.構成
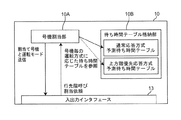
図1は、実施形態1に係るエレベータの群管理システムの構成を示すブロック図である。
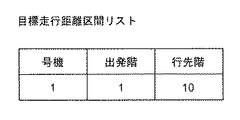
本実施形態のエレベータ30は、号機のかごの走行速度を走行距離や乗車率に応じて定格速度よりも速い速度で走行可能な可変速エレベータである。制御装置10は、速度アップ運転条件を満たす走行区間(以下、適宜「速度アップ可能区間」という)が存在する号機(速度アップ可能号機)について、当該速度アップ可能区間において、速度アップ運転を行う。速度アップ運転条件は、(1)走行区間の走行距離が目標走行距離以上であり、かつ(2)当該走行区間の乗車率が目標乗車率の範囲内にあることである。乗車率とは、かごへの乗車定員に対する乗車人数の比率であり、乗車人数は行先階呼びの登録個数から求めることができる。目標乗車率の範囲とは、速度アップ運転が可能となる乗車率の範囲である。目標乗車率の範囲は、かご(利用者を含む)と釣合おもりとの重量差が速度アップ運転を可能とする所定量以下となる範囲に基づいて設定される。走行距離とは、エレベータの上昇運転または下降運転時の上下方向の距離である。エレベータは、階間で走行するので、走行距離は、出発階と行先階との間の階間距離として求めることができる。目標走行距離とは、速度アップ運転を行った場合に所望の走行時間短縮効果が得られる予め設定した走行距離である。目標走行距離は、目標とする走行時間短縮量に応じて任意の値に設定すればよい。
本実施形態のエレベータの群管理システムは、利用者が所望の行先階を示す行先階呼びを登録するための行先階登録装置20と、行先階登録装置20で登録された行先階呼びに基づいて複数台のエレベータ30のうちのいずれかを行先階呼びに割り当てる制御装置10と、を備え、走行距離及び乗車率が速度アップ運転条件(所定の速度アップ運転条件)を満たす走行区間が存在するエレベータ30を、当該走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせることが可能である。
制御装置10は、
行先階登録装置20で新たな行先階呼びが登録されたときに、
複数台のエレベータ30のそれぞれについて、
新たな行先階呼びを当該エレベータ30に仮割当し、
当該エレベータ30を、所定階から、当該エレベータ30において登録されている各行先階に順次停車させながら最も上方の行先階まで上昇運転させる過程で、速度アップ運転条件を満たす走行区間が存在するか否かの第1の判断を行い、
第1の判断において速度アップ運転条件を満たす走行区間が存在するエレベータ30が存在する場合、当該エレベータ30の中から割当エレベータ30を決定し、決定した割当エレベータ30に対して、速度アップ運転条件を満たす走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせ、
第1の判断において速度アップ運転条件を満たすエレベータ30が存在しない場合、
複数台のエレベータ30のそれぞれについて、
新たな行先階呼びを当該エレベータ30に仮割当し、
当該エレベータ30を、所定階から、当該エレベータ30について登録されている行先階のうち最も上方の行先階まで無停止で上昇運転させ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、速度アップ運転条件が成立するか否かの第2の判断を行い、
第2の判断において、無停止上昇運転の走行区間において速度アップ運転条件を満たすエレベータ30が存在する場合、当該エレベータ30の中から割当エレベータ30を決定し、決定した割当エレベータ30に対して、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
速度アップ運転条件は、走行区間の走行距離が目標走行距離以上であり、かつ当該走行区間の乗車率が目標乗車率の範囲内にあることである、
(第1の他の例)
前記実施形態のエレベータの群管理システムでは、制御装置10は、第1の判断において速度アップ運転条件を満たすエレベータ30が存在しない場合、第2の判断を行う。しかし、制御装置10は、第1の判断を行うことなく、第2の判断以後の処理を行う構成を採用してもよい。
制御装置10は、
行先階登録装置20で新たな行先階呼びが登録されたときに、
複数台のエレベータ30のそれぞれについて、
新たな行先階呼びを当該エレベータ30に仮割当し、
当該エレベータ30を、所定階から、当該エレベータ30について登録されている行先階のうち最も上方の行先階まで無停止で上昇運転させ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、速度アップ運転条件が成立するか否かの判断を行い、
判断において、無停止上昇運転の走行区間において速度アップ運転条件を満たすエレベータ30が存在する場合、当該エレベータ30の中から割当エレベータ30を決定し、決定した割当エレベータ30に対して、無停止上昇運転の走行区間において定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
前記実施形態のエレベータの群管理システムは、複数台のエレベータ30を有するエレベータシステムを対象としている。しかし、前記実施形態のエレベータの群管理システムの技術思想は、エレベータ30を1台だけ有するエレベータシステムにも応用可能である。すなわち、エレベータ30を1台だけ有するエレベータシステムにおいては、いずれのエレベータ30に割当を行うという判断が不要であるが、速度アップ運転の可否の判断は同様に行うことができる。
制御装置10は、
行先階登録装置20で新たな行先階呼びが登録されたときに、
新たな行先階呼びを当該エレベータ30に仮割当し、
当該エレベータ30を、所定階から、当該エレベータ30について登録されている各行先階に順次停車させながら最も上方の行先階まで上昇運転させる過程で、速度アップ運転条件を満たす走行区間が存在するか否かの第1の判断を行い、
第1の判断において速度アップ運転条件を満たす走行区間が存在するときは、速度アップ運転条件を満たす走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせ、
第1の判断において速度アップ運転条件を満たす走行区間が存在しないときは、
新たな行先階呼びを当該エレベータ30に仮割当し、
当該エレベータ30を、所定階から、登録されている行先階のうち最も上方の行先階まで無停止で上昇運転を行わせ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、速度アップ運転条件が成立するか否かの第2の判断を行い、
第2の判断において速度アップ運転条件が成立すると判定したときは、当該エレベータ30を、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
第2の他の例のエレベータの制御システムでは、制御装置10は、第1の判断において速度アップ運転条件を満たさない場合、第2の判断を行う。しかし、制御装置10は、第1の判断を行うことなく、第2の判断以後の処理を行う構成を採用してもよい。
制御装置10は、
行先階登録装置20で新たな行先階呼びが登録されたときに、
新たな行先階呼びを当該エレベータ30に仮割当し、
当該エレベータ30を、所定階から、登録されている行先階のうち最も上方の行先階まで無停止で上昇運転を行わせ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、無停止上昇運転の走行区間において、速度アップ運転条件が成立するか否かの判断を行い、
判断において速度アップ運転条件が成立すると判定したときは、当該エレベータ30を、無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる。
前記実施形態及び第1〜第3の他の例では、行先階登録装置20は、ビルのロビー階(1階)に配備されている場合について説明した。しかし、エレベータ30が1台だけ設けられている第2の他の例及び第3の他の例においては、行先階登録装置20や制御装置10は、エレベータ30のかごの内部に設けられていてもよい。この場合、行先階登録装置20として、エレベータ30のかご内に設けた行先階ボタン等を利用することができる。制御装置10は、エレベータ30がビルのロビー階(1階)を出発する際の速度アップ運転の可否を、行先階登録装置20で登録された行先階に基づいて判断すればよい。
11 制御部
12 記憶部
13 入出力インタフェース
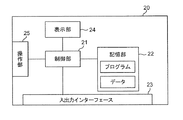
20 行先階登録装置
21 制御部
22 記憶部
23 入出力インタフェース
24 表示部
25 操作部
30 エレベータ
Claims (6)
- 利用者が所望の行先階を示す行先階呼びを登録するための行先階登録装置と、前記行先階登録装置で登録された行先階呼びに基づいて複数台のエレベータのうちのいずれかを前記行先階呼びに割り当てる制御装置と、を備え、走行距離及び乗車率が所定の速度アップ運転条件を満たす走行区間が存在するエレベータを、当該走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせることが可能なエレベータの群管理システムであって、
前記制御装置は、
前記行先階登録装置で新たな行先階呼びが登録されたときに、
前記複数台のエレベータのそれぞれについて、
前記新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータにおいて登録されている各行先階に順次停車させながら最も上方の行先階まで上昇運転させる過程で、前記所定の速度アップ運転条件を満たす走行区間が存在するか否かの第1の判断を行い、
前記第1の判断において前記所定の速度アップ運転条件を満たす走行区間が存在するエレベータが存在する場合、当該エレベータの中から割当エレベータを決定し、決定した割当エレベータに対して、前記所定の速度アップ運転条件を満たす走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせ、
前記第1の判断において前記所定の速度アップ運転条件を満たすエレベータが存在しない場合、
前記複数台のエレベータのそれぞれについて、
前記新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、前記所定階から、当該エレベータについて登録されている行先階のうち最も上方の行先階まで無停止で上昇運転させ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、前記無停止上昇運転の走行区間において、前記所定の速度アップ運転条件が成立するか否かの第2の判断を行い、
前記第2の判断において、前記無停止上昇運転の走行区間において前記所定の速度アップ運転条件を満たすエレベータが存在する場合、当該エレベータの中から割当エレベータを決定し、決定した割当エレベータに対して、前記無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる、
エレベータの群管理システム。 - 利用者が所望の行先階を示す行先階呼びを登録するための行先階登録装置と、前記行先階登録装置で登録された行先階呼びに基づいて複数台のエレベータのうちのいずれかを前記行先階呼びに割り当てる制御装置と、を備え、走行距離及び乗車率が所定の速度アップ運転条件を満たす走行区間が存在するエレベータを、当該走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせることが可能なエレベータの群管理システムであって、
前記制御装置は、
前記行先階登録装置で新たな行先階呼びが登録されたときに、
前記複数台のエレベータのそれぞれについて、
前記新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータについて登録されている行先階のうち最も上方の行先階まで無停止で上昇運転させ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、前記無停止上昇運転の走行区間において、前記所定の速度アップ運転条件が成立するか否かの判断を行い、
前記判断において、前記無停止上昇運転の走行区間において前記所定の速度アップ運転条件を満たすエレベータが存在する場合、当該エレベータの中から割当エレベータを決定し、決定した割当エレベータに対して、前記無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる、
エレベータの群管理システム。 - 前記所定の速度アップ運転条件は、走行区間の走行距離が目標走行距離以上であり、かつ当該走行区間の乗車率が目標乗車率の範囲内にあることである、
請求項1または請求項2に記載のエレベータの群管理システム。 - 利用者が所望の行先階を示す行先階呼びを登録するための行先階登録装置と、前記行先階登録装置で登録された行先階呼びに基づいてエレベータの運転を制御する制御装置とを、備え、走行距離及び乗車率が所定の速度アップ運転条件を満たす走行区間が存在する場合に、当該エレベータを、当該走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせることが可能なエレベータの制御システムであって、
前記制御装置は、
前記行先階登録装置で新たな行先階呼びが登録されたときに、
前記新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、当該エレベータについて登録されている各行先階に順次停車させながら最も上方の行先階まで上昇運転させる過程で、前記所定の速度アップ運転条件を満たす走行区間が存在するか否かの第1の判断を行い、
前記第1の判断において前記所定の速度アップ運転条件を満たす走行区間が存在するときは、前記所定の速度アップ運転条件を満たす走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせ、
前記第1の判断において前記所定の速度アップ運転条件を満たす走行区間が存在しないときは、
前記新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、前記所定階から、登録されている行先階のうち最も上方の行先階まで無停止で上昇運転を行わせ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、前記無停止上昇運転の走行区間において、前記所定の速度アップ運転条件が成立するか否かの第2の判断を行い、
前記第2の判断において前記所定の速度アップ運転条件が成立すると判定したときは、当該エレベータを、前記無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる、
エレベータの制御システム。 - 利用者が所望の行先階を示す行先階呼びを登録するための行先階登録装置と、前記行先階登録装置で登録された行先階呼びに基づいてエレベータの運転を制御する制御装置とを、備え、走行距離及び乗車率が所定の速度アップ運転条件を満たす走行区間が存在する場合に、当該エレベータを、当該走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせることが可能なエレベータの制御システムであって、
前記制御装置は、
前記行先階登録装置で新たな行先階呼びが登録されたときに、
前記新たな行先階呼びを当該エレベータに仮割当し、
当該エレベータを、所定階から、登録されている行先階のうち最も上方の行先階まで無停止で上昇運転を行わせ、その後の下降運転の過程で、登録されている行先階のうちの残りの行先階に上方側の行先階から順に停車させることにより、前記無停止上昇運転の走行区間において、前記所定の速度アップ運転条件が成立するか否かの判断を行い、
前記判断において前記所定の速度アップ運転条件が成立すると判定したときは、当該エレベータを、前記無停止上昇運転の走行区間において、定格速度よりも速い速度で走行させる速度アップ運転を行わせる、
エレベータの制御システム。 - 前記所定の速度アップ運転条件は、走行区間の走行距離が目標走行距離以上であり、かつ当該走行区間の乗車率が目標乗車率の範囲内にあることである、
請求項4または請求項5に記載のエレベータの制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014143350A JP6213408B2 (ja) | 2014-07-11 | 2014-07-11 | エレベータの群管理システム |
| CN201510404403.7A CN105253726B (zh) | 2014-07-11 | 2015-07-10 | 电梯群管理系统和电梯控制系统 |
| HK16102666.1A HK1214583A1 (zh) | 2014-07-11 | 2016-03-08 | 電梯群管理系統和電梯控制系統 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014143350A JP6213408B2 (ja) | 2014-07-11 | 2014-07-11 | エレベータの群管理システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016016992A JP2016016992A (ja) | 2016-02-01 |
| JP2016016992A5 JP2016016992A5 (ja) | 2017-08-17 |
| JP6213408B2 true JP6213408B2 (ja) | 2017-10-18 |
Family
ID=55093734
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014143350A Active JP6213408B2 (ja) | 2014-07-11 | 2014-07-11 | エレベータの群管理システム |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6213408B2 (ja) |
| CN (1) | CN105253726B (ja) |
| HK (1) | HK1214583A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017203658A1 (ja) * | 2016-05-26 | 2017-11-30 | 三菱電機株式会社 | 入退管理システム |
| JP6419918B1 (ja) * | 2017-09-20 | 2018-11-07 | 東芝エレベータ株式会社 | エレベータ群管理制御装置及びエレベータ群管理制御方法 |
| CN110228744B (zh) * | 2018-03-06 | 2021-10-19 | 富士达株式会社 | 气压控制模式的设定方法以及具备气压调整装置的电梯 |
| JP7306518B1 (ja) | 2022-03-17 | 2023-07-11 | フジテック株式会社 | エレベータの群管理システム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03272979A (ja) * | 1990-03-22 | 1991-12-04 | Mitsubishi Electric Corp | エレベータの群管理装置 |
| JP3570272B2 (ja) * | 1999-02-22 | 2004-09-29 | フジテック株式会社 | エレベータの群管理装置 |
| WO2005121002A1 (ja) * | 2004-06-07 | 2005-12-22 | Mitsubishi Denki Kabushiki Kaisha | エレベータの群管理制御装置 |
| WO2009008083A1 (ja) * | 2007-07-12 | 2009-01-15 | Mitsubishi Electric Corporation | エレベータシステム |
| JP4663755B2 (ja) * | 2008-04-23 | 2011-04-06 | 株式会社日立製作所 | エレベータの群管理システム |
| JP5464979B2 (ja) * | 2009-11-17 | 2014-04-09 | 株式会社日立製作所 | エレベータの群管理システム |
| JP6076825B2 (ja) * | 2013-05-09 | 2017-02-08 | 株式会社日立製作所 | エレベータシステム |
-
2014
- 2014-07-11 JP JP2014143350A patent/JP6213408B2/ja active Active
-
2015
- 2015-07-10 CN CN201510404403.7A patent/CN105253726B/zh active Active
-
2016
- 2016-03-08 HK HK16102666.1A patent/HK1214583A1/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN105253726A (zh) | 2016-01-20 |
| HK1214583A1 (zh) | 2016-07-29 |
| JP2016016992A (ja) | 2016-02-01 |
| CN105253726B (zh) | 2018-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5705704B2 (ja) | エレベータ群管理システムおよびその制御方法 | |
| JP6435894B2 (ja) | エレベータ群管理システム及び乗場呼びの登録モード切替制御方法 | |
| JP2007191263A (ja) | エレベータ表示装置 | |
| JP2012056697A (ja) | エレベータシステム | |
| JP6213408B2 (ja) | エレベータの群管理システム | |
| JP2011111253A (ja) | エレベータの群管理制御システムおよびその群管理制御方法 | |
| JP6638424B2 (ja) | エレベータの群管理制御装置、群管理システム、及びエレベータシステム、並びにエレベータの群管理制御方法 | |
| JP2001335244A (ja) | エレベータシステム及びその制御方法 | |
| JP2020019611A (ja) | マルチカーエレベーター及びマルチカーエレベーター制御方法 | |
| JP2015048202A (ja) | エレベータ制御装置 | |
| JP5735384B2 (ja) | エレベータの群管理制御装置 | |
| US10071879B2 (en) | Method for controlling an elevator system | |
| JP6213406B2 (ja) | エレベータの群管理システム | |
| JP7036052B2 (ja) | マルチデッキエレベータの群管理システム | |
| JP6079874B2 (ja) | エレベータ制御システム | |
| JP6213409B2 (ja) | エレベータの群管理システム | |
| JP6686986B2 (ja) | エレベータの運行制御装置及び運行制御システム、並びにエレベータシステム | |
| JP5665078B2 (ja) | エレベータ | |
| JP6485314B2 (ja) | エレベータの群管理制御装置及び群管理システム、並びにエレベータシステム | |
| JP6624159B2 (ja) | エレベータの群管理システム | |
| JP2010137988A (ja) | エレベータシステム | |
| JP7136256B1 (ja) | エレベータの制御装置 | |
| JP6950777B2 (ja) | エレベータシステム | |
| JP7306518B1 (ja) | エレベータの群管理システム | |
| JP4357248B2 (ja) | エレベータの群管理制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170707 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170822 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170904 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6213408 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |