JP6160399B2 - Destination information providing program, destination information providing apparatus, and destination information providing method - Google Patents
Destination information providing program, destination information providing apparatus, and destination information providing method Download PDFInfo
- Publication number
- JP6160399B2 JP6160399B2 JP2013196179A JP2013196179A JP6160399B2 JP 6160399 B2 JP6160399 B2 JP 6160399B2 JP 2013196179 A JP2013196179 A JP 2013196179A JP 2013196179 A JP2013196179 A JP 2013196179A JP 6160399 B2 JP6160399 B2 JP 6160399B2
- Authority
- JP
- Japan
- Prior art keywords
- destination
- probability
- user
- destination candidate
- information providing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
Description
本発明は、行先情報提供プログラム、行先情報提供装置および行先情報提供方法に関する。 The present invention relates to a destination information providing program, a destination information providing apparatus, and a destination information providing method.
携帯電話機やスマートフォン等に代表される端末装置には、GPS(Global Positioning System)のような測位機能が、一般的に搭載されてきている。そのため、端末装置のユーザは、現在位置を測位できると共に、その現在位置の情報を、ネットワークを介してサーバへ送信することによって、位置に応じた様々なサービス情報を受信することができる。例えば、近年では、端末装置のユーザ(例えば旅行者)の位置情報に基づいて、現在位置の近隣の観光スポットをユーザに配信する観光案内サービスが、サービス提供業者によって行われている。 A terminal device typified by a mobile phone or a smartphone has generally been equipped with a positioning function such as GPS (Global Positioning System). Therefore, the user of the terminal device can measure the current position, and can receive various service information corresponding to the position by transmitting information on the current position to the server via the network. For example, in recent years, a service guide service has been provided by a service provider that distributes tourist spots in the vicinity of the current location to a user based on location information of a user of a terminal device (for example, a traveler).
本発明の1つの側面では、ユーザにとっての観光案内サービスの利便性を向上させることが可能な行先情報提供プログラム、行先情報提供装置および行先情報提供方法を提供することを目的とする。 An object of one aspect of the present invention is to provide a destination information providing program, a destination information providing apparatus, and a destination information providing method capable of improving the convenience of a tourist information service for a user.
発明の一観点によれば、行先情報提供装置に、ユーザの位置の情報を受信する処理と、前記ユーザの位置から行先の候補へ移動する確率に基づいて、前記行先の候補の中から、第1の行先候補と、前記確率が前記第1の行先候補以下である第2の行先候補とを抽出する処理と、前記ユーザの位置から前記第1の行先候補へ移動する第1の確率と、前記ユーザの位置から前記第2の行先候補へ移動する第2の確率との差が所定の閾値以上である場合に、前記第1の行先候補を前記ユーザの位置からの行先として決定する処理と、前記第1の確率と前記第2の確率との差が前記所定の閾値よりも小さい場合に、前記ユーザの位置の近傍の地点である近傍位置を特定する処理と、前記近傍位置から行先の候補へ移動する確率の比較により、前記候補の中から前記ユーザの位置からの行先を決定する処理と、
を実行させる行先情報提供プログラムが提供される。
According to one aspect of the invention, the destination information providing apparatus receives the information on the user's position and the probability of moving from the user position to the destination candidate. A process of extracting one destination candidate and a second destination candidate whose probability is less than or equal to the first destination candidate; a first probability of moving from the user's position to the first destination candidate; A process of determining the first destination candidate as a destination from the user position when a difference from a second probability of moving from the user position to the second destination candidate is equal to or greater than a predetermined threshold; , When the difference between the first probability and the second probability is smaller than the predetermined threshold, the process of identifying a nearby position that is a point near the user's position; comparison of the probability of moving to the candidate, the candidate A process of determining the destination from the position of the user from being,
A destination information providing program for executing is provided.
一実施態様によれば、簡易な方法で次の移動先の候補地を決定する精度を向上させることが可能な行先情報提供プログラム、行先情報提供装置および行先情報提供方法を提供することができる。 According to one embodiment, it is possible to provide a destination information providing program, a destination information providing apparatus, and a destination information providing method capable of improving the accuracy of determining a next destination candidate site by a simple method.
以下、本発明の実施形態について、図1乃至図20を参照して具体的に説明する。 Hereinafter, embodiments of the present invention will be specifically described with reference to FIGS. 1 to 20.
図1は、行先情報提供システムの一例を示す図である。図1に示すように、行先情報提供システムは、行先情報提供装置10と端末装置30とを有している。行先情報提供装置10と端末装置30とは、ネットワーク50を介して相互に通信可能に接続されている。
FIG. 1 is a diagram illustrating an example of a destination information providing system. As shown in FIG. 1, the destination information providing system includes a destination
行先情報提供装置10は、端末装置30から受信した、次の移動先の候補地の推薦要求に応じて、端末装置30を所有するユーザに行先の情報を提供する装置である。行先情報提供装置10は、例えばサーバ、またはパーソナルコンピュータ(PC)等によって実現される。行先情報提供装置10が実行する処理の方法については後述する。
The destination
端末装置30は、行先情報の提供サービスを利用するユーザが所有する端末であり、例えばスマートフォン、携帯電話、ノ−トPC(Personal Computer)、またはタブレット端末等である。また、端末装置30は測位機能を有している。測位機能は、例えばGPSである。また、端末装置30は、GPSの他に、携帯電話による通話または通信に利用している基地局の位置情報を利用して位置情報を算出する機能、またはWi−Fiの電波を利用して位置情報を算出する機能を有していても良い。
The
次に、行先情報提供装置10のハードウェア構成について説明する。
Next, the hardware configuration of the destination
図2は、行先情報提供装置10のハードウェア構成の一例を示す図である。図2に示すように、行先情報提供装置10は、CPU(Central Processing Unit)61、ROM(Read Only Memory)62、RAM(Random Access Memory)63、ストレージ装置64、ネットワークインタフェース65、及び可搬型記憶媒体用ドライブ66等を備えている。
FIG. 2 is a diagram illustrating an example of a hardware configuration of the destination
行先情報提供装置10の構成各部は、バス67に接続されている。ストレージ装置64は、例えばHDD(Hard Disk Drive)である。行先情報提供装置10では、ROM62あるいはストレージ装置64に格納されているプログラム(行先情報提供プログラムを含む)、或いは可搬型記憶媒体用ドライブ66が可搬型記憶媒体68から読み取ったプログラム(行先情報提供プログラムを含む)をCPU61等のプロセッサが実行することにより、行先情報提供装置10の機能が実現される。ネットワークインタフェース65は、例えばNIC(Network Interface Card)である。
Each component of the destination
次に、図1に戻り、行先情報提供装置10を構成する各部の機能について説明する。
Next, returning to FIG. 1, the function of each unit constituting the destination
図1に示すように、行先情報提供装置10は、第1記憶部11と、第2記憶部12と、受信部13と、行先候補抽出部14と、行先決定部15と、送信部16と、近傍位置抽出部17とを備えている。
As illustrated in FIG. 1, the destination
第1記憶部11は、例えば図2のROM62、ストレージ装置64、可搬型記憶媒体用ドライブ66あるいは可搬型記憶媒体68に対応する。第1記憶部11は、推薦する行先を決定するための行先情報提供プログラムを記憶することができる。
The
第2記憶部12は、例えば図2のROM62、RAM63、ストレージ装置64、可搬型記憶媒体用ドライブ66あるいは可搬型記憶媒体68に対応する。第2記憶部12は、行先情報提供装置10内で行われる処理に用いる確率表および経路グラフを記憶するためのデータベース(DB;Data Base)として用いられる。ここで、確率表とは、現在位置と、行先と、現在位置にいる旅行者が行先に移動する確率とが対応付けられた情報である。また、経路グラフとは、複数の地点と、地点間を結ぶ経路の有無と、各地点の座標の情報とを含む経路情報である。確率表および経路グラフの詳細については後述する。
The
受信部13は、端末装置30に基づいた次の移動先の候補地の推薦要求と、ユーザが所持する端末装置30の位置の情報とを受信する。受信部13は、端末装置30と相互に通信可能に接続されており、例えば図2のネットワークインタフェース65によって実現される。以降では、現在位置の情報を現在位置情報と呼称する。
The receiving
行先候補抽出部14は、端末装置30から受信した現在位置情報に基づいて、第2記憶部12に格納されている確率表から、旅行者の行先の候補である行先候補と、現在位置から行先候補へ移動する確率の情報とを抽出する。
Based on the current position information received from the
行先決定部15は、行先候補抽出部14によって抽出された行先候補と確率の情報とに基づいて、行先候補の中から推薦する行先を決定する。
The
送信部16は、行先情報提供装置10によって決定された、推薦する行先の情報を端末装置30に送信する。
The
近傍位置抽出部17は、経路グラフ上で現在位置に隣接する近傍位置を抽出する。近傍位置の抽出方法の詳細については後述する。
The neighborhood
上述の行先候補抽出部14、行先決定部15および近傍位置抽出部17は、例えば図2のCPU61あるいはMPU等のプロセッサによって実現される。
The destination
次に、行先情報提供装置10による行先情報提供方法について説明する。
Next, a destination information providing method by the destination
図3は、行先情報提供システムによる行先情報提供方法の一例を示すフローチャートである。 FIG. 3 is a flowchart showing an example of a destination information providing method by the destination information providing system.
まず、行先情報の提供サービスを利用するユーザは、行先情報提供装置10から次の移動先の推薦を受けるため、所有する端末装置30を用いて行先情報提供装置10に推薦要求と、現在位置情報とを送信する。そして、行先情報提供装置10の受信部13は、端末装置30から推薦要求および現在位置情報を受信する(S101)。受信部13は、受信した現在位置情報を第2記憶部12に格納する。
First, a user who uses the destination information providing service receives a recommendation request from the destination
図4は、経路グラフの一例を示す図である。図4は、理解を容易にするために、観光地図の上に経路グラフを重ねて表示している。図4中の観光地図において、実線で示された道路は高速道路を示しており、点線で示された道路は一般道路を示している。また、長方形は鉄道の駅を示しており、駅同士を結ぶ実線は、鉄道の路線を示している。一方、図4中の経路グラフにおいて、A、B、X、Y、P、Q、RおよびSは、行先(例えば観光スポット)を示す地点を示しており、行先同士を結ぶ線は、経路を示している。 FIG. 4 is a diagram illustrating an example of a path graph. FIG. 4 displays a route graph superimposed on a sightseeing map for easy understanding. In the tourism map in FIG. 4, roads indicated by solid lines indicate highways, and roads indicated by dotted lines indicate general roads. Further, the rectangle indicates a railway station, and the solid line connecting the stations indicates a railway line. On the other hand, in the route graph in FIG. 4, A, B, X, Y, P, Q, R, and S indicate points indicating destinations (for example, sightseeing spots), and a line connecting the destinations indicates the route. Show.
図5は、図4の経路グラフのデータ構造を示す、経路グラフDBの一例を示す図である。この経路グラフDBは、第2記憶部12に格納されている。図5に示すように、経路グラフDBは、地点A、B、X、Y、P、Q、RおよびS毎に、位置情報と、隣接する地点の情報とが対応付けられたものである。位置情報の欄には、当該地点における座標の情報として緯度および経度の情報が格納されている。隣接する地点の欄には、経路上で当該地点が隣接している地点の情報が格納されている。
FIG. 5 is a diagram showing an example of a route graph DB showing the data structure of the route graph of FIG. The route graph DB is stored in the
図3に戻り、S101の処理の後、行先候補抽出部14は、受信した現在位置情報をもとに、経路グラフ上の現在位置の地点を決定する(S102)。具体的には、行先候補抽出部14は、受信した現在位置情報をもとに、経路グラフDBに格納されている複数の地点のいずれかの地点を現在位置として割り当てる。図4の例では、ユーザの現在位置として割り当てられた地点はBである。現在位置を割り当てるに際し、ユーザの現在位置が経路グラフDBに格納されている地点のいずれにも一致しない場合、行先候補抽出部14は、経路グラフに示されている複数の地点の中から最寄りの地点を選択し、選択した地点を現在位置としてみなす。具体的には、経路グラフDBに登録されている各地点の中から、現在位置情報に含まれる座標との距離が最短となる地点を選択する処理を実行することにより、最寄りの地点を決定することができる。この方法によれば、経路グラフ上の地点の経路グラフDBへの登録数を抑えることできるため、第2記憶部12に格納する情報量の低減を図ることができる。
Returning to FIG. 3, after the process of S101, the destination
続いて、行先候補抽出部14は、S102で決定した現在位置の地点に対応する第一次行先候補および確率情報を、第2記憶部12に格納されている確率表から抽出する(S103)。S103の処理を行うのは、複数の現在位置に対応する情報が確率表に登録されており、確率表からS102で決定した現在位置の地点に対応する情報のみを抽出するためである。以下、確率表について説明する。
Subsequently, the destination
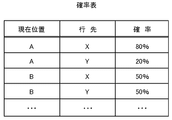
図6は、確率表の一例を示す図である。図6に示すように、確率表は、現在位置、行先、現在位置にいる旅行者が行先に移動する確率の各情報が対応付けられたものであり、第2記憶部12に格納されている。確率表の現在位置の欄には、図5の経路グラフDBの地点欄に格納されている全ての地点が登録されていることが好ましい。図7において、現在位置および行先の欄に登録されている記号は、図4における行先を示す地点の名称を示している。また、確率欄に登録されている値は、現在位置にいる旅行者が行先に移動する確率を示している。この確率は、図7に示す情報を用いて算出することができる。
FIG. 6 is a diagram illustrating an example of the probability table. As shown in FIG. 6, the probability table is associated with each information of the current position, the destination, and the probability that the traveler at the current position moves to the destination, and is stored in the
図7は、過去の旅行者の移動経路毎の頻度の情報の一例を示す図である。図7に示すように、過去の旅行者の移動経路の情報は、現在位置と、行先と、現在位置から行先へ移動した旅行者の数(頻度)とが対応付けられた情報である。図7を参照すると、例えば旅行者が現在位置Aから行先Xへ移動する頻度は40であり、現在位置Aから行先Yへ移動する頻度は10である。そして、旅行者が行先XおよびY以外の行先に移動した記録がない。よって、旅行者が現在位置Aから行先Xへ移動する確率は{40/(40+10)}×100%=80%と算出され、算出結果が図6の確率表に登録される。同様に、旅行者が現在位置Aから行先Yへ移動する確率は{10/(40+10)}×100%=20%と算出され、算出結果が図6の確率表に登録される。以上の処理を現在位置と行先との組み合わせ毎に行うことによって、確率表を作成することができる。 FIG. 7 is a diagram illustrating an example of frequency information for each travel route of a past traveler. As shown in FIG. 7, the information on the travel route of the past traveler is information in which the current position, the destination, and the number (frequency) of travelers who have moved from the current position to the destination are associated with each other. Referring to FIG. 7, for example, the frequency at which the traveler moves from the current position A to the destination X is 40, and the frequency at which the traveler moves from the current position A to the destination Y is 10. There is no record that the traveler has moved to a destination other than the destinations X and Y. Therefore, the probability that the traveler moves from the current position A to the destination X is calculated as {40 / (40 + 10)} × 100% = 80%, and the calculation result is registered in the probability table of FIG. Similarly, the probability that the traveler moves from the current position A to the destination Y is calculated as {10 / (40 + 10)} × 100% = 20%, and the calculation result is registered in the probability table of FIG. A probability table can be created by performing the above processing for each combination of the current position and the destination.
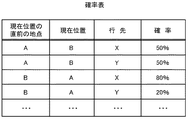
図8は、確率表の変形例を示す図である。図8に示すように、確率表は、現在位置の直前の地点、現在位置、行先、現在位置にいる旅行者が行先に移動する確率の各情報が対応付けられたものであり、第2記憶部12に格納されている。例えば、現在位置の直前の地点がAで、現在位置がBである場合、旅行者が現在位置Bの前にAにいたことを示している。現在位置の直前の地点、現在位置および行先の欄に登録されている記号は、図4または図5における行先を示す地点の名称に対応している。なお、確率欄に登録されている値は、現在位置にいる旅行者が行先に移動する確率を示しており、この確率は、図9に示す、過去の旅行者の移動経路の情報をもとに算出することができる。
FIG. 8 is a diagram illustrating a modified example of the probability table. As shown in FIG. 8, the probability table is a table in which each information of a point immediately before the current position, the current position, the destination, and the probability that the traveler at the current position moves to the destination is associated with the second memory. Stored in the
図9は、過去の旅行者の移動経路毎の頻度の情報の変形例である。図9に示すように、過去の旅行者の移動経路の情報は、現在位置の直前の地点、現在位置、行先、現在位置から行先に移動した旅行者の数(頻度)とが対応付けられたものであり、第2記憶部12に格納されている。図9を参照すると、例えば地点Aから現在位置Bに移動してきた旅行者が、現在位置Bから行先Xへ移動する頻度は10であり、地点Aから現在位置Bに移動してきた旅行者が、現在位置Aから行先Yへ移動する頻度は10である。そして、旅行者が行先XおよびY以外の行先に移動した記録がない。よって、旅行者が現在位置Aから行先Xへ移動する確率は{10/(10+10)}×100%=50%と算出され、算出結果が図9の確率表に登録される。同様に、旅行者が現在位置Aから行先Yへ移動する確率は{10/(10+10)}×100%=50%と算出され、算出結果が図8の確率表に登録される。以上の処理を現在位置までの経路と行先との組み合わせ毎に行うことによって、確率表を作成することができる。
FIG. 9 is a modification of the frequency information for each travel route of the past traveler. As shown in FIG. 9, the information on the travel route of the past traveler is associated with the point immediately before the current position, the current position, the destination, and the number (frequency) of travelers who have moved from the current position to the destination. And is stored in the
次に、図6の確率表を用いて本実施形態の処理の具体例を説明する。以降では、端末装置30の現在位置をNとして説明する。
Next, a specific example of the processing of this embodiment will be described using the probability table of FIG. Hereinafter, the current position of the
図10は、S103における、第一次行先候補および確率情報を抽出する処理の一例を示すフローチャートである。S103では、S102で決定された現在位置の地点に対応する情報を、確率表の先頭行から順次検索する処理を実行する。 FIG. 10 is a flowchart illustrating an example of a process of extracting a primary destination candidate and probability information in S103. In S103, a process of sequentially searching for information corresponding to the point of the current position determined in S102 from the first row of the probability table is executed.
まず、行先候補抽出部14は、確率表の1行目から検索を行うため、iの値を初期設定し、i=1とする(S201)。
First, the destination
続いて、行先候補抽出部14は、確率表を検索し、確率表にi行目が存在するか否かを判定する(S202)。確率表にi行目が存在しない場合(S202否定)、確率表の全ての行の検索が終了したものと判定し、S104に移る。一方、確率表にi行目が存在する場合(S202肯定)、確率表のi行目の「現在位置」欄を参照し、現在位置Nが登録されているか否かを判定する。i行目の「現在位置」欄に、現在位置Nが登録されていない場合(S203否定)、確率表のi行目には、現在位置に対応する情報が格納されていないものと判定する。そこで、確率表の次の行を検索するため、iの値をカウントアップし、iに1を加算した値を新たなiの値とする(S205)。S205の処理の後、S202に戻り、S202以降の処理を再び実行する。
Subsequently, the destination
一方、確率表のi行目の「現在位置」欄に、現在位置Nが登録されている場合(S203肯定)、行先候補抽出部14は、i行目に対応する「行先」欄に登録されている情報を第一次行先候補として抽出するとともに、i行目に対応する「確率」欄に登録されている確率の情報を抽出する(S204)。その後、iの値をカウントアップするS205の処理を経てS202に戻る。そして、確率表のi+1行目以降を検索するため、S202以降の処理を再び実行する。
On the other hand, when the current position N is registered in the “current position” column of the i-th row of the probability table (Yes in S203), the destination
やがて、確率表の全ての行の探索が終了すると、S202においてS202否定と判定され、S104に移る。 Eventually, when the search of all the rows of the probability table is completed, it is determined as S202 negative in S202, and the process proceeds to S104.
以上のようにして、S102で決定された現在位置の地点に対応する全ての第一次行先候補および確率の各情報を確率表から抽出することができる。 As described above, all primary destination candidates and probability information corresponding to the point of the current position determined in S102 can be extracted from the probability table.
図3に戻り、S103の処理の後、行先決定部15は、第一次行先候補から行先を一意に決定できたか否かを判定する(S104)。以下、第一次行先候補の集合をC1として、S104の処理の詳細について説明する。
Returning to FIG. 3, after the process of S103, the
図11は、S104における、第一次行先候補から行先を決定する処理の一例を示すフローチャートである。 FIG. 11 is a flowchart illustrating an example of a process for determining a destination from the primary destination candidates in S104.
まず、行先決定部15は、第一次行先候補の集合C1に属する全ての行先候補について、確率の降順でソートする(S301)。
First, the
図12は、現在位置がAである場合の行先候補を、確率の降順でソートした結果の一例を示す図である。図6によれば、第一次行先候補はXおよびYであり、AからXへ移動する確率は80%、AからYへ移動する確率は20%であることがわかる。そこで、行先候補をソートすると、X,Yの順序で配列される。 FIG. 12 is a diagram illustrating an example of a result of sorting the destination candidates when the current position is A in descending order of probability. As can be seen from FIG. 6, the primary destination candidates are X and Y, the probability of moving from A to X is 80%, and the probability of moving from A to Y is 20%. Therefore, when the destination candidates are sorted, they are arranged in the order of X and Y.
続いて、行先候補抽出部14は、第一次行先候補の中から確率の高さが上位2つの行先候補c1、c2(但し、c1≧c2)を抽出する(S302)。例えば図12の例では、行先候補抽出部14は、行先候補c1としてXを抽出し、行先候補c2としてYを抽出することとなる。
Subsequently, the destination
図11に戻り、続いて、行先決定部15は、c1とc2との確率差が所定の閾値以上か否かを判定する(S303)。例えば閾値を5%と設定した場合、図12の例によれば、c1とc2との確率差は80%−20%=60%と算出される。例えば閾値を5%と設定した場合、60%≧5%であることから、この場合、行先決定部15は、c1とc2との確率差が所定の閾値以上である(S303肯定)と判定する。
Returning to FIG. 11, subsequently, the
S303肯定と判定された場合、行先決定部15は、c1を次の行先として決定する。そして、行先決定部15は、次の行先を一意に決定できた(S104肯定)と判定する(S305)。そして、図3に戻り、送信部16は、推薦要求を発信した端末装置30に対して、当該情報を送信する(S105)。そして、行先情報提供装置10による一連の処理を終了する。
When it is determined that S303 is affirmative, the
一方、図11に戻り、c1とc2との確率差が所定の閾値より小さい場合(S303否定)、行先決定部15は、c1およびc2のいずれかを選択することが困難であるため、次の行先を一意に決定できなかった(S104否定)と判定する(S306)。そして、図3のS106に移る。
On the other hand, returning to FIG. 11, when the probability difference between c1 and c2 is smaller than the predetermined threshold (No in S303), the
例えば、現在位置がBであり、c1としてX、c2としてYがそれぞれ抽出された場合、図6の確率表から、c1とc2との確率差は50%−50%=0%と算出される。仮に閾値を5%と設定した場合、0%<5%であることから、行先決定部15は、c1とc2との確率差が所定の閾値以上でない(S303否定)と判定し、S106に移る。
For example, when the current position is B and X is extracted as c1 and Y is extracted as c2, the probability difference between c1 and c2 is calculated as 50% -50% = 0% from the probability table of FIG. . If the threshold is set to 5%, since 0% <5%, the
図3のS106において、行先候補抽出部14は、第一次行先候補の絞り込みを実行するため、第一次行先候補の中から第二次行先候補を抽出する。以下、第二次行先候補の抽出方法の詳細について説明する。
In S106 of FIG. 3, the destination
図13は、S106における、第二次行先候補の抽出方法の一例を示すフローチャートである。 FIG. 13 is a flowchart illustrating an example of a secondary destination candidate extraction method in S106.
まず、行先候補抽出部14は、第二次行先候補の集合C2を空集合で初期化する(S401)。
First, the destination
続いて、行先候補抽出部14は、c1との確率の差が所定の閾値ε以内であるような全ての行先候補を抽出する(S402)。図6の確率表によれば、Xとの確率の差が所定の閾値(ε=5%)以内である第一次行先候補はYのみである。そこで、行先候補抽出部14は、S402でYを抽出する。
Subsequently, the destination
続いて、行先候補抽出部14は、図11のS302で抽出したc1と、S402で抽出した行先候補とを、第二次行先候補の集合C2に追加する(S403)。S302でc1としてXが抽出された場合、行先候補抽出部14は、XおよびYを第二次行先候補として集合C2に追加する。その後、図3のS107に移る。以上のようにして、行先候補抽出部14は、第二次行先候補を抽出することができる。
Subsequently, the destination
図3のS107において、近傍位置抽出部17は、現在位置および第二次行先候補の各情報を用いて、現在位置の近傍位置を抽出する。ここで、近傍位置とは、旅行者がいる地点の周囲における地形や、道路や鉄道等の交通網を勘案して、現在位置から出発した場合と同様の移動傾向を示すと推定される地点である。近傍位置を抽出するのは、近傍位置にいる旅行者と現在位置にいる旅行者とが同様の移動傾向があるものと推察されるため、現在位置に対応する情報を用いて次の移動先を絞り込むことが困難となった場合に、近傍位置に対応する情報を用いて次の移動先を推定することができるからである。また、近傍位置を利用しないと、次の移動先の候補地を推定するために経路グラフ上の全ての地点のデータを処理することとなり、処理時間の増大を招く恐れがあるからである。
In S107 of FIG. 3, the vicinity
以降では、近傍位置の一例として、経路グラフ上で現在位置の地点に隣接する地点を近傍位置と見做した場合の、近傍位置の抽出方法について説明する。 Hereinafter, as an example of the vicinity position, a method for extracting the vicinity position when a point adjacent to the point of the current position on the route graph is regarded as the vicinity position will be described.
図14は、S107における、近傍位置の抽出方法の一例を示すフローチャートである。 FIG. 14 is a flowchart illustrating an example of a method for extracting a neighboring position in S107.
まず、近傍位置抽出部17は、近傍位置の集合Nを空集合で初期化する(S501)。
First, the neighborhood
続いて、近傍位置抽出部17は、経路グラフ上で、現在位置に隣接する行先の集合Tを抽出する(S502)。例えば、現在位置がBである場合、図5の経路グラフDBを参照すると、現在位置Bに隣接する行先はA、X、およびYの3地点であることがわかる。そこで、近傍位置抽出部17は、集合Tに属する行先として、A、X、およびYを抽出する。
Subsequently, the neighborhood
続いて、近傍位置抽出部17は、集合Tに属する全ての行先について判定処理を実施したか否かを判定する(S503)。全ての行先について判定処理を実施したと判定されなかった場合(S503否定)、近傍位置抽出部17は、集合Tから未判定の地点tを抽出する(S504)。
Subsequently, the neighborhood
続いて、近傍位置抽出部17は、地点tが、集合C2に属する全ての第二次行先候補と経路グラフ上で隣接しているか否かを判定する(S505)。集合C2に属する全ての第二次行先候補と経路グラフ上で隣接していると判定された場合(S505肯定)、地点tを近傍位置として決定し、近傍位置の集合Nに追加する(S506)。例えば、第二次行先候補がXおよびYであり、地点tとしてAが抽出された場合、図5の経路グラフDBを参照すると、AはXおよびYの両方に経路グラフ上で隣接している。そのため、近傍位置抽出部17は、S505肯定と判定し、Aを近傍位置の集合Nに追加する。
Subsequently, the proximity
一方、集合C2に属する全ての第二次行先候補と経路グラフ上で隣接していると判定されなかった場合(S505否定)、S503に戻り、近傍位置抽出部17は、S503以降の処理を再び実行する。例えば、第二次行先候補がXおよびYであり、地点tとしてXが抽出された場合、図5の経路グラフDBを参照すると、Xは、経路グラフ上でXおよびYのいずれにも隣接していない。よって、近傍位置抽出部17は、S505否定と判定する。また、地点tとしてYが抽出された場合、図5の経路グラフDBを参照すると、Yは、経路グラフ上でXおよびYのいずれにも隣接していない。よって、この場合においても、近傍位置抽出部17は、S505否定と判定する。
On the other hand, if it is not determined that all secondary destination candidates belonging to the set C2 are adjacent to each other on the route graph (No at S505), the process returns to S503, and the neighboring
S503からS506までの処理を繰り返すと、やがて集合Tに属する全ての地点についての判定処理が終了する。S503において、集合Tに属する全ての地点について判定処理を実施したと判定された場合(S503肯定)、集合Nに属する近傍位置が確定し、S108に移る。以上の処理を経ると、近傍位置としてAが抽出される。 When the processing from S503 to S506 is repeated, the determination processing for all points belonging to the set T is finished. If it is determined in S503 that the determination process has been performed for all points belonging to the set T (Yes in S503), the neighboring positions belonging to the set N are determined, and the process proceeds to S108. After the above processing, A is extracted as a neighboring position.
続いて、S108において、行先決定部15は、確率表から近傍位置の確率情報を取得し、確率情報に基づいて、推薦する行先を決定する。S108では、近傍位置を起点とした行先のうち、最も確率が高い行先を検索することによって、推薦する行先を決定する。例えば、近傍位置がAである場合、図6の確率表を参照すると、現在位置Aを起点とした場合に選択し得る行先は、XまたはYの2地点である。さらに、確率表の中の確率の欄を参照すると、AからXに移動する確率は80%であり、AからYに移動する確率は20%である。すなわち、AからYに移動する確率よりもAからXに移動する確率の方が高いことから、行先決定部15は、Xを推薦する行先として決定する。なお、例えば確率の差が所定の閾値ε以内である場合など、推薦する行先を一意に決定できない場合、行先決定部15は、複数の行先を推薦する行先として決定してもよい。
Subsequently, in S108, the
S108の処理の後、送信部16は、決定された行先の情報を、推薦要求を発信した端末装置30に対して送信する(S109)。
After the process of S108, the
図15は、推薦する行先の情報のユーザ側における出力例を示す図である。図15に示すように、単に推薦する行先だけでなく、その他の候補の行先を、対応する確率情報とともにユーザに提供することによって、ユーザにとって選択肢が広がり、利便性の向上を図ることができる。 FIG. 15 is a diagram illustrating an output example on the user side of recommended destination information. As shown in FIG. 15, not only the recommended destination but also other candidate destinations are provided to the user together with the corresponding probability information, so that the options for the user can be expanded and the convenience can be improved.
図16は、推薦する行先の情報のユーザ側における別の出力例を示す図である。図16に示すように、図15に示す情報に加え、地図の上に経路グラフを重ねた図を推薦する行先の情報をユーザ側に提供することもできる。具体的には、まず経路グラフとともに地図の情報を第2記憶部12に格納しておく。そして、送信部16は、第2記憶部12に格納されている経路グラフのうち、現在位置を中心とした所定の範囲の領域に対応する地図の情報を第2記憶部12から読み出す。その後、送信部16は、地図と経路グラフとを重畳し、重畳生成した情報を端末装置30に送信する。以上のようにして、行先情報提供装置10は、図16に示す情報をユーザ側に提供することができる。
FIG. 16 is a diagram illustrating another output example on the user side of recommended destination information. As shown in FIG. 16, in addition to the information shown in FIG. 15, information on a destination that recommends a diagram in which a route graph is superimposed on a map can be provided to the user side. Specifically, first, map information is stored in the
以上の方法によれば、地図を参照することによって行先を二次元的に把握できるため、ユーザの利便性の向上を図ることができる。S109の処理の後、行先情報提供装置10による一連の処理を終了する。
According to the above method, since the destination can be grasped two-dimensionally by referring to the map, the convenience of the user can be improved. After the process of S109, a series of processes by the destination
以上のようにして、行先情報提供装置10は、行先情報の提供サービスを利用するユーザに、推薦する行先の情報を提供することができる。
As described above, the destination
行先情報提供装置10が、旅行者が現在位置からある行先に移動する確率に基づいて、最も高い確率を有する行先を次の移動先の候補地として決定する方法を用いた場合、同程度の確率を有する行先が複数存在すると、行先をいずれかに決定することが困難となる。
When the destination
本実施形態によれば、現在位置の情報を受信し、現在位置の近傍の地点である近傍位置を抽出し、近傍位置から行先の候補へ移動する確率の比較により、行先の候補の中から行先を決定する。この方法によれば、行先情報提供装置10は、現在位置に関する確率情報に基づいて次の行先を決定することが困難であっても、近傍位置に関する確率情報を用いて次の行先の決定を図ることにより、行先候補の絞り込みを行うことができる。このため、簡易な方法で次の移動先の候補地を決定する精度を向上させることが可能となる。
According to the present embodiment, information on the current position is received, a neighboring position that is a point in the vicinity of the current position is extracted, and the destination is searched from among the destination candidates by comparing the probabilities of moving from the neighboring position to the destination candidate. To decide. According to this method, even if it is difficult for the destination
(変形例)
次に、行先情報提供方法の変形例について説明する。なお、本変形例を実現するための情報処理システムは、図1および図2に例示されている行先情報提供システムの構成を用いることができるため、説明を省略する。
(Modification)
Next, a modified example of the destination information providing method will be described. In addition, since the information processing system for implement | achieving this modification can use the structure of the destination information provision system illustrated by FIG. 1 and FIG. 2, description is abbreviate | omitted.
これまで説明した実施形態では、第一次行先候補から次の行先を一意に決定できなかった場合に、第一次行先候補の中から第二次行先候補を抽出し、現在位置および第二次行先候補の両方に隣接する地点を近傍位置として抽出している。これに対して本変形例では、第一次行先候補から次の行先を一意に決定できなかった場合に、経路グラフ上で現在位置に隣接する地点の中から、現在位置と共通する交通網を有している地点を近傍位置として選択することを特徴としている。 In the embodiments described so far, when the next destination cannot be uniquely determined from the primary destination candidates, the secondary destination candidates are extracted from the primary destination candidates, and the current position and the secondary destination are extracted. Points adjacent to both destination candidates are extracted as neighboring positions. On the other hand, in this modification, when the next destination cannot be uniquely determined from the primary destination candidates, a traffic network common to the current position is selected from the points adjacent to the current position on the route graph. The point which has is selected as a near position.
図17は、行先情報提供方法の変形例を示すフローチャートである。S104までの処理、およびS104肯定と判定された場合に実行するS105の処理は、図3の処理と略同様である。 FIG. 17 is a flowchart showing a modification of the destination information providing method. The process up to S104 and the process of S105 executed when it is determined that S104 is affirmative are substantially the same as the process of FIG.
図17のS104において、第一次行先候補から次の行先を一意に決定できたと判定されなかった場合(S104否定)、近傍位置抽出部17は、現在位置に隣接する近傍位置を抽出する(S107a)。
If it is not determined in S104 of FIG. 17 that the next destination has been uniquely determined from the primary destination candidates (No in S104), the vicinity
図18は、S107aにおける、近傍位置の抽出方法の一例を示すフローチャートである。S501からS504までの処理は、図14の処理と略同様である。S504において、集合Tから未判定の地点tが抽出された後、近傍位置抽出部17は、地点tが、現在位置と交通網における相関性を有するか否かを判定する(S505a)。具体的には、地点毎の交通網の情報を格納したDBを第2記憶部12に格納しておく。
FIG. 18 is a flowchart illustrating an example of a method for extracting a neighboring position in S107a. The processing from S501 to S504 is substantially the same as the processing in FIG. In S504, after the undetermined point t is extracted from the set T, the neighboring
図19は、経路グラフの一例を示す図である。図19では、図4の経路グラフに地点Cが新たに追加されている。図20は、交通網DBの一例を示す図である。図20の交通網DBには、図19の経路グラフに含まれる各地点が、最寄りの鉄道路線の名称および最寄りの幹線道路の名称に対応付けられて登録されている。幹線道路は、例えば国道または高速道路である。図20中の「−」は、対応する情報が存在せず、未登録であることを示している。 FIG. 19 is a diagram illustrating an example of a route graph. In FIG. 19, the point C is newly added to the route graph of FIG. FIG. 20 is a diagram illustrating an example of a traffic network DB. In the traffic network DB of FIG. 20, each point included in the route graph of FIG. 19 is registered in association with the name of the nearest railway line and the name of the nearest main road. The main road is, for example, a national road or a highway. “-” In FIG. 20 indicates that the corresponding information does not exist and is not registered.
S505aにおいて、例えば、現在位置がBであり、地点tとしてCが抽出された場合、図20の交通網DBを参照すると、BとCとは最寄りの鉄道路線がa線およびb線である点で共通している。また、BとCとは最寄りの幹線道路に国道16号線が含まれている点でも共通している。よって、この場合、近傍位置抽出部17は、地点t(t=C)が、現在位置と交通網における相関性を有すると判定する(S505a肯定)。そして、近傍位置抽出部17は、地点tを近傍位置として決定し、近傍位置の集合Nに追加する(S506)。その後、S503に戻る。
In S505a, for example, when the current position is B and C is extracted as the point t, referring to the traffic network DB of FIG. 20, the nearest railway lines are the a and b lines. In common. B and C are also common in that the
一方、S505aにおいて、例えば、現在位置がBであり、地点tとしてAが抽出された場合、図20の交通網DBを参照すると、Aの最寄りの鉄道路線はc線であり、Bの最寄りの鉄道路線はa線およびb線である。このことから、AとBとは鉄道路線において共通点を有していないことがわかる。また、Aの最寄りの幹線道路は国道1号線であり、Bの最寄りの幹線道路は国道16号線および国道133号線である。このことから、AとBとは幹線道路においても共通点を有していないことがわかる。そのため、近傍位置抽出部17は、地点t(t=A)が、現在位置と交通網における相関性を有さないと判定し(S505a否定)、S503に戻る。
On the other hand, in S505a, for example, when the current position is B and A is extracted as the point t, referring to the traffic network DB in FIG. Railway lines are a-line and b-line. From this, it can be seen that A and B do not have a common point on the railway line. The closest main road of A is National Highway No. 1, and the closest main road of B is
S503において、集合Tに属する全ての要素について判定を実施した(S503肯定)と判定された場合、図17のS108に移る。S108以降の処理は、図3に示す処理と略同様である。なお、S505aの処理の結果、複数の地点が近傍位置として抽出された場合は、座標の情報を用いて現在位置と各地点との距離を計測し、距離が最短となる地点を近傍位置として選定することができる。 If it is determined in S503 that determination has been performed for all elements belonging to the set T (Yes in S503), the process proceeds to S108 in FIG. The processing after S108 is substantially the same as the processing shown in FIG. Note that if a plurality of points are extracted as neighboring positions as a result of the processing in S505a, the distance between the current position and each point is measured using the coordinate information, and the point with the shortest distance is selected as the neighboring position. can do.
旅行者は、徒歩圏外に移動する際には、一般に交通網を利用する可能性が高い。このため、本変形例のように、地点毎の交通網の情報に基づいて、現在位置と交通網の相関性を有する地点を近傍位置として決定することにより、現在位置と地理的に類似する近傍位置を抽出することができるため、推薦する行先を選定する上で、選定精度の向上を図ることができる。 When a traveler travels outside the walking range, the possibility of using a transportation network is generally high. For this reason, as in the present modification, a neighborhood that is geographically similar to the current location is determined by determining a location having a correlation between the current location and the traffic network based on the traffic network information for each location. Since the position can be extracted, the selection accuracy can be improved in selecting the recommended destination.
以上、本発明の好ましい実施例について詳述したが、本発明は特定の実施例に限定されるものではなく、種々の変形や変更が可能である。例えば、本発明は、人だけでなく、車や荷物の行先を決定する用途にも適用することができる。また、本発明は、観光案内サービスだけでなく、例えば混雑しない移動経路を推薦するサービスや、混雑や渋滞の予測を提供するサービス等にも適用することが可能である。 The preferred embodiments of the present invention have been described in detail above, but the present invention is not limited to specific embodiments, and various modifications and changes can be made. For example, the present invention can be applied not only to a person but also to a use for determining a destination of a car or a luggage. Further, the present invention can be applied not only to a sightseeing guide service but also to a service that recommends a travel route that is not congested, a service that provides a prediction of congestion and traffic congestion, and the like.
また、行先情報提供装置10は、装置内に設けた表示装置を用いて、推薦する行先の情報を表示することもできる。この構成によれば、行先情報提供サービスの提供者側で、行先情報提供サービスの利用状況や処理結果の妥当性を、表示画面を参照しながら把握することができる。表示装置は、例えば液晶ディスプレイ、プラズマディスプレイまたは有機ELディスプレイ等である。
The destination
10:行先情報提供装置
11:第1記憶部
12:第2記憶部
13:受信部
14:行先候補抽出部
15:行先決定部
16:送信部
17:近傍位置抽出部
30:端末装置
50:ネットワーク
61:CPU
62:ROM
63:RAM
64:ストレージ装置
65:ネットワークインタフェース
66:可搬型記憶媒体用ドライブ
67:バス
68:可搬型記憶媒体
10: Destination information providing device 11: First storage unit 12: Second storage unit 13: Reception unit 14: Destination candidate extraction unit 15: Destination determination unit 16: Transmission unit 17: Neighborhood position extraction unit 30: Terminal device 50: Network 61: CPU
62: ROM
63: RAM
64: Storage device 65: Network interface 66: Portable storage medium drive 67: Bus 68: Portable storage medium
Claims (7)
ユーザの位置の情報を受信する処理と、
前記ユーザの位置から行先の候補へ移動する確率に基づいて、前記行先の候補の中から、第1の行先候補と、前記確率が前記第1の行先候補以下である第2の行先候補とを抽出する処理と、
前記ユーザの位置から前記第1の行先候補へ移動する第1の確率と、前記ユーザの位置から前記第2の行先候補へ移動する第2の確率との差が所定の閾値以上である場合に、前記第1の行先候補を前記ユーザの位置からの行先として決定する処理と、
前記第1の確率と前記第2の確率との差が前記所定の閾値よりも小さい場合に、前記ユーザの位置の近傍の地点である近傍位置を特定する処理と、
前記近傍位置から行先の候補へ移動する確率の比較により、前記候補の中から前記ユーザの位置からの行先を決定する処理と、
を実行させることを特徴とする行先情報提供プログラム。 In the destination information providing device,
Processing to receive user location information;
Based on the probability of moving from the user's position to a destination candidate, out of the destination candidates, a first destination candidate and a second destination candidate whose probability is less than or equal to the first destination candidate Processing to extract,
When the difference between the first probability of moving from the user position to the first destination candidate and the second probability of moving from the user position to the second destination candidate is greater than or equal to a predetermined threshold. , Processing for determining the first destination candidate as a destination from the position of the user;
When a difference between the first probability and the second probability is smaller than the predetermined threshold, a process of specifying a proximity position that is a point in the vicinity of the user position;
A process of determining a destination from the position of the user from among the candidates by comparing the probability of moving from the neighboring position to a destination candidate;
A destination information providing program characterized in that the program is executed.
前記行先候補を前記確率の降順でソートし、ソート後の先頭の行先候補を前記第1の行先候補として決定し、2番目の行先候補を前記第2の行先候補として決定する処理を含むことを特徴とする請求項1記載の行先情報提供プログラム。 The process of extracting the first destination candidate and the second destination candidate is as follows:
Including sorting the destination candidates in descending order of the probabilities, determining the first destination candidate after sorting as the first destination candidate, and determining the second destination candidate as the second destination candidate. The destination information providing program according to claim 1, wherein:
前記行先の候補の中から、前記第1の行先候補と、前記第1の行先候補との確率の差が前記所定の閾値以内であるような全ての行先候補とを抽出する処理と、
地点間を結ぶ経路を示す経路情報において、前記ユーザの位置に対応する地点に隣接する地点を抽出する処理と、
前記ユーザの位置に対応する地点に隣接する地点の中から、前記第1の行先候補および前記全ての行先候補の全てに隣接する地点を近傍位置として抽出する処理と、
を含むことを特徴とする請求項1又は2に記載の行先情報提供プログラム。 The process of specifying the vicinity position is as follows:
A process for extracting from the destination candidates all destination candidates whose difference in probability between the first destination candidate and the first destination candidate is within the predetermined threshold;
In the route information indicating the route connecting the points, a process of extracting a point adjacent to the point corresponding to the position of the user;
A process of extracting a point adjacent to all of the first destination candidate and all of the destination candidates from points adjacent to the point corresponding to the position of the user,
Destination information providing program according to claim 1 or 2, characterized in that it comprises a.
地点毎に対応付けられた交通網の情報に基づいて、前記ユーザの位置と交通網の相関性を有する地点を近傍位置として決定する処理を含むことを特徴とする請求項1又は2に記載の行先情報提供プログラム。 The process of specifying the vicinity position is as follows:
Based on the information of the associated transportation network for each point, according to claim 1 or 2, characterized in that it comprises a process of determining a point having a correlation of the position and traffic network of the user as a position near Destination information providing program.
前記経路情報に含まれる複数の地点の中から、前記ユーザの位置の情報に含まれる座標との距離が最短となる地点を選択する処理を含むことを特徴とする請求項1〜4のいずれか1項に記載の行先情報提供プログラム。 The process of specifying the vicinity position is as follows:
From the plurality of points included in the route information, any one of claims 1-4 in which the distance between the coordinates included in the information of the position of the user, characterized in that it comprises a process of selecting the point having the shortest The destination information providing program according to item 1.
前記ユーザの位置から行先の候補へ移動する確率に基づいて、前記行先の候補の中から、第1の行先候補と、前記確率が前記第1の行先候補以下である第2の行先候補とを抽出する行先候補抽出部と、
前記ユーザの位置から前記第1の行先候補へ移動する第1の確率と、前記ユーザの位置から前記第2の行先候補へ移動する第2の確率との差が所定の閾値よりも小さい場合に、前記ユーザの位置の近傍の地点である近傍位置を特定する近傍位置抽出部と、
前記第1の確率と前記第2の確率との差が所定の閾値以上である場合に、前記第1の行先候補を前記ユーザの位置からの行先として決定し、前記第1の確率と前記第2の確率との差が所定の閾値よりも小さい場合に、前記近傍位置から行先の候補へ移動する確率の比較により、前記行先の候補の中から前記ユーザの位置からの行先を決定する行先決定部と、
を有することを特徴とする行先情報提供装置。 A receiving unit that receives information on a user's location;
Based on the probability of moving from the user's position to a destination candidate, out of the destination candidates, a first destination candidate and a second destination candidate whose probability is less than or equal to the first destination candidate A destination candidate extraction unit to be extracted;
When a difference between a first probability of moving from the user position to the first destination candidate and a second probability of moving from the user position to the second destination candidate is smaller than a predetermined threshold. , and the neighboring position extraction unit for specifying a position near a point near the position of the user,
When the difference between the first probability and the second probability is equal to or greater than a predetermined threshold, the first destination candidate is determined as a destination from the user's position, and the first probability and the first probability Destination determination for determining a destination from the user's position from among the destination candidates by comparing the probability of moving from the neighboring position to the destination candidate when the difference from the probability of 2 is smaller than a predetermined threshold And
A destination information providing apparatus comprising:
ユーザの位置の情報を受信し、
前記ユーザの位置から行先の候補へ移動する確率に基づいて、前記行先の候補の中から、第1の行先候補と、前記確率が前記第1の行先候補以下である第2の行先候補とを抽出し、
前記ユーザの位置から前記第1の行先候補へ移動する第1の確率と、前記ユーザの位置から前記第2の行先候補へ移動する第2の確率との差が所定の閾値以上である場合に、前記第1の行先候補を前記ユーザの位置からの行先として決定し、
前記第1の確率と前記第2の確率との差が前記所定の閾値よりも小さい場合に、前記ユーザの位置の近傍の地点である近傍位置を特定し、
前記近傍位置から行先の候補へ移動する確率の比較により、前記行先の候補の中から前記ユーザの位置からの行先を決定する、
ことを特徴とする行先情報提供方法。
A destination information providing method by a destination information providing apparatus,
Receive user location information,
Based on the probability of moving from the user's position to a destination candidate, out of the destination candidates, a first destination candidate and a second destination candidate whose probability is less than or equal to the first destination candidate Extract and
When the difference between the first probability of moving from the user position to the first destination candidate and the second probability of moving from the user position to the second destination candidate is greater than or equal to a predetermined threshold. , Determining the first destination candidate as a destination from the position of the user;
If the difference between the first probability and the second probability is less than the predetermined threshold , identify a nearby position that is a point near the user's position;
By comparing the probability of moving from the neighboring position to a destination candidate, the destination from the user position is determined from among the destination candidates.
A destination information providing method characterized by the above.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013196179A JP6160399B2 (en) | 2013-09-20 | 2013-09-20 | Destination information providing program, destination information providing apparatus, and destination information providing method |
| US14/456,188 US9372087B2 (en) | 2013-09-20 | 2014-08-11 | Method of providing destination information, destination-information providing apparatus and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013196179A JP6160399B2 (en) | 2013-09-20 | 2013-09-20 | Destination information providing program, destination information providing apparatus, and destination information providing method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015060575A JP2015060575A (en) | 2015-03-30 |
| JP6160399B2 true JP6160399B2 (en) | 2017-07-12 |
Family
ID=52691676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013196179A Active JP6160399B2 (en) | 2013-09-20 | 2013-09-20 | Destination information providing program, destination information providing apparatus, and destination information providing method |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9372087B2 (en) |
| JP (1) | JP6160399B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6672711B2 (en) * | 2015-11-04 | 2020-03-25 | 富士通株式会社 | Path graph generation method, apparatus, and program |
| WO2017147918A1 (en) * | 2016-03-04 | 2017-09-08 | 茹旷 | Big data computation system for shopping center |
| CN109282825B (en) * | 2017-07-21 | 2021-03-09 | 北京嘀嘀无限科技发展有限公司 | Road marking method and device |
| US10401858B2 (en) * | 2017-08-29 | 2019-09-03 | Waymo Llc | Arranging passenger pickups for autonomous vehicles |
| EP3648024A1 (en) * | 2018-11-05 | 2020-05-06 | Sony Mobile Communications Inc. | Methods, devices and computer program products for providing improved estimated times of arrival by detecting and classifying waypoints |
| KR102434787B1 (en) * | 2020-07-01 | 2022-08-23 | (주)케이시크 | connected tour service method based on self-driving vehicle |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE556297T1 (en) * | 2001-08-06 | 2012-05-15 | Panasonic Corp | INFORMATION PROVIDING METHOD AND APPARATUS |
| JP2003254777A (en) * | 2002-03-06 | 2003-09-10 | Ntt Data Corp | Moving information notifying system and program therefor |
| JP4130828B2 (en) * | 2004-07-13 | 2008-08-06 | 松下電器産業株式会社 | Destination display device and destination display method |
| JP4283338B2 (en) * | 2007-05-02 | 2009-06-24 | パナソニック株式会社 | Destination prediction apparatus, destination prediction method, navigation apparatus, and program |
| JP5199152B2 (en) | 2009-03-12 | 2013-05-15 | 株式会社日立製作所 | Behavior prediction method and behavior prediction system |
| JP5546784B2 (en) * | 2009-03-24 | 2014-07-09 | シャープ株式会社 | Notification device, notification system, control method for notification device, control program, and computer-readable recording medium recording the program |
| JP5382436B2 (en) | 2009-08-03 | 2014-01-08 | ソニー株式会社 | Data processing apparatus, data processing method, and program |
| JP5495014B2 (en) * | 2009-09-09 | 2014-05-21 | ソニー株式会社 | Data processing apparatus, data processing method, and program |
| JP5573068B2 (en) * | 2009-09-25 | 2014-08-20 | 株式会社日立製作所 | Navigation management server information provision method |
| JP2012008659A (en) | 2010-06-22 | 2012-01-12 | Sony Corp | Data processing device, data processing method, and program |
| US8538686B2 (en) * | 2011-09-09 | 2013-09-17 | Microsoft Corporation | Transport-dependent prediction of destinations |
| US9200918B2 (en) * | 2012-03-09 | 2015-12-01 | Apple Inc. | Intelligent destination recommendations based on historical data |
| US8855901B2 (en) * | 2012-06-25 | 2014-10-07 | Google Inc. | Providing route recommendations |
| US8938358B1 (en) * | 2013-04-23 | 2015-01-20 | Google Inc. | System and method for suggesting alternative travel destinations |
-
2013
- 2013-09-20 JP JP2013196179A patent/JP6160399B2/en active Active
-
2014
- 2014-08-11 US US14/456,188 patent/US9372087B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015060575A (en) | 2015-03-30 |
| US9372087B2 (en) | 2016-06-21 |
| US20150088410A1 (en) | 2015-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6160399B2 (en) | Destination information providing program, destination information providing apparatus, and destination information providing method | |
| US10356554B2 (en) | Information processing method, terminal, server, and computer storage medium | |
| US20160227367A1 (en) | Method of providing positioning data to mobile device | |
| US20140258281A1 (en) | Method And Server For Searching For Nearby User In Social Networking Services | |
| JP5560229B2 (en) | Route search system and route search method | |
| JP5525835B2 (en) | POI recommendation server and POI recommendation system | |
| WO2011072605A1 (en) | Method and terminal for searching interest point | |
| US11507606B2 (en) | Visual search system for finding trip destination | |
| CN106708837B (en) | Interest point searching method and device | |
| JP2013250883A (en) | Information processing device, information processing method and program | |
| JP5913250B2 (en) | Transmitter, positioning system, communication control method, and communication control program | |
| JP6327331B2 (en) | Information processing device | |
| JP2023021135A (en) | Route search system, route search method, and program | |
| KR101598809B1 (en) | The method for setting the position of user and searching for adjacent users by the relation of up and down | |
| JP6101129B2 (en) | Facility search device, facility search method, and facility search program | |
| JP2005017218A (en) | Facility information searching system | |
| JP5537480B2 (en) | Related area search system and related area search method | |
| CN113340319B (en) | Vehicle navigation method and related equipment | |
| KR20130082672A (en) | Traffic information searching method of mobile communication device | |
| KR101913573B1 (en) | Navigation information collecting apparatus and method by a crowd-sourcing | |
| US20180167780A1 (en) | Local memory direction caching | |
| JP5942404B2 (en) | Information analysis apparatus, information analysis method, and program | |
| JP6262683B2 (en) | Information processing apparatus, control method thereof, and program | |
| JP2022059498A (en) | Information processing device, information processing method, and program | |
| JP2014178261A (en) | Log information disclosure system, log information disclosure device, log information disclosure method, and computer program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20160401 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170321 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170516 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170529 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6160399 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |