JP6002643B2 - 制御装置およびそれを用いた交流電動機システム - Google Patents
制御装置およびそれを用いた交流電動機システム Download PDFInfo
- Publication number
- JP6002643B2 JP6002643B2 JP2013185040A JP2013185040A JP6002643B2 JP 6002643 B2 JP6002643 B2 JP 6002643B2 JP 2013185040 A JP2013185040 A JP 2013185040A JP 2013185040 A JP2013185040 A JP 2013185040A JP 6002643 B2 JP6002643 B2 JP 6002643B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- current
- phase
- threshold value
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/03—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/185—Circuit arrangements for detecting position without separate position detecting elements using inductance sensing, e.g. pulse excitation
Description
を用いて説明する。
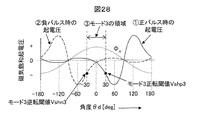
特許文献1では、図27(a)、(b)に示すように、PMモータの2つの相にパルス電圧を印加すると、PMモータの回転子の位置に応じた起電圧が、通電していない非通電相に発生する。図27ではU相が非通電相になっている。この起電圧は、PMモータの回転子に取り付けられている永久磁石磁束と、通電電流の関係によって、モータ内のインダクタンスが微小に変化することで発生する電圧であり、停止状態においても観測可能である。よって、この磁気飽和起電圧を観測することで、図28に示すような回転子の位置(角度)に対する依存性が観測され、低速域での位置センサレス駆動が可能となる。この起電圧を、回転子が回転することで発生する速度起電圧と区別するために、磁気飽和起電圧と呼んでいる。磁気飽和起電圧は、非通電相に発生する電圧であるため、制御側で検出相を選択して、電圧を読み込む必要がある。
零速度付近で、回転子の速度やトルクを制御するには、正確な回転子位置がわからなければならない。正転、逆転を実現するため、図6に示すバイ・ポーラPWMを採用する。バイ・ポーラとは、正側、負側の双方にパルスを必ず立てるというPWMの方式である。この双方のパルスに対して、起電圧をそれぞれ観測すると、図7のような関係が得られる。正転方向にトルクを発生させるパルスを「正転パルス」、その逆を「逆転パルス」とすると、得られる起電圧は図7にようになる。ここで正転パルスは従来通りのものだが、逆転パルスによる起電圧が新たに記載されている。正転の閾値と同様、逆転の閾値も設定することで、正転・逆転の連続駆動も可能になる。尚、この逆転駆動に関する記載は、すでに文献1(「磁気飽和による起電圧を利用した永久磁石同期モータの低速センサレス〜零速度近傍の正・逆転駆動〜」平成23年電気学会産業応用部門大会講演論文集、No. 1-163、pp. I-715〜I-720 (2011))にて公開されている。
よって、本実施例によれば、電磁騒音を生じることもなく、低速からの高応答、高精度なセンサレス駆動が実現できる。
。
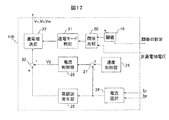
5…電流センサ、31…直流電源、32…インバータ主回路、33…ゲート・ドライバ、
11…マルチプレクサー、12…閾値検出器、13…速度・電流制御器、
14…切替器、15…PWM発生器
Claims (13)
- 三相交流電動機の二相を選択して通電し、残りの非通電相の電圧値と、該電圧値に対する閾値との比較に基づいて通電相を切替え、該三相交流電動機を回転駆動する交流電動機の制御装置であって、
前記閾値の設定は、前記閾値を検出するための閾値検出モードを備えるものとし、該閾値検出モードでは、前記三相交流電動機の回転子を直流通電によって一旦固定し、その後、二相間に交流電流を通電して前記閾値を取得することを特徴とする交流電動機の制御装置。 - 請求項1に記載の交流電動機の制御装置であって、
前記閾値検出モードは、前記三相交流電動機の二相間に直流を通電することで回転子を一旦固定し、その後、直流を通電した二相とは異なる組み合わせの二相間に交流電流を通電して、前記閾値を取得し、これらの直流通電ならびに交流通電を少なくとも1回以上の組合せで実施して前記閾値を検出することを特徴とする交流電動機の制御装置。 - 請求項1に記載の交流電動機の制御装置であって、
前記閾値検出モードは、前記三相交流電動機の二相間に直流を通電することで回転子を一旦固定し、その後、直流を通電した二相とは異なる組み合わせの2通りの二相間に、それぞれ交流電流を通電して、前記閾値をそれぞれ取得し、これらの直流通電ならびに交流通電を少なくとも1回以上の組合せで実施して前記閾値を検出することを特徴とする交流電動機の制御装置。 - 請求項1乃至3の何れか1項に記載の交流電動機の制御装置であって、
前記閾値検出モードにおいて、通電する前記交流電流は、通電開始時から徐々に振幅を増加させることを特徴とする交流電動機の制御装置。 - 請求項1乃至4の何れか1項に記載の交流電動機の制御装置であって、
前記閾値検出モードにおける交流電流振幅を予め設定する機能を備え、該交流電流振幅の設定値に至るように、前記交流電流の周波数を調整する手段を備えることを特徴とする交流電動機の制御装置。 - 請求項1乃至5の何れか1項に記載の交流電動機の制御装置であって、
前記交流電動機の通常駆動時における起動時には、電流を予め設定した値に一致するように制御して加速し、その後、速度制御機能を動作させて回転制御を行うことを特徴とする交流電動機の制御装置。 - 請求項1乃至5の何れか1項に記載の交流電動機の制御装置であって、
前記交流電動機の通常駆動時、前記通電相を流れる電流のピーク値が、予め設定した値に一致するように高調波成分を電圧に加算して制御を行うことを特徴とする交流電動機の制御装置。 - 請求項1乃至5の何れか1項に記載の交流電動機の制御装置であって、
前記交流電動機の通常駆動時、前記閾値検出モードで得られた電流値と前記閾値の関係を、データマップ、もしくは関数にて内蔵しておき、該データマップ、もしくは関数に基づいて、駆動電流に対する閾値を算出して、前記交流電動機を駆動することを特徴とする交流電動機の制御装置。 - 請求項1乃至8の何れか1項に記載の交流電動機の制御装置であって、
前記閾値検出モードの開始時の動作として、前記非通電相の電圧波形を複数回数サンプリングし、電圧波形の立ち上がり時の振動範囲を検出し、該振動範囲を避けるように、電圧検出タイミングを設定する機能を備えることを特徴とする交流電動機の制御装置。 - 請求項9に記載の交流電動機の制御装置であって、
前記複数回数サンプリングは、演算処理周期毎にサンプリングを行うものとし、かつ、サンプリングタイミングを徐々にずらすことで実現することを特徴とする交流電動機の制御装置。 - 請求項1乃至10の何れか1項に記載の交流電動機の制御装置であって、
前記閾値検出モードの実施前に、
前記通電相を変更した際の非通電相の電圧をサンプリングして、通電相を変更した際の電流の減衰期間を測定し、
前記非通電相の電圧値と該電圧値に対する閾値との比較を行わない重なり期間を抽出することを特徴とする交流電動機の制御装置。 - 請求項1乃至11の何れか1項に記載の交流電動機の制御装置であって、
該制御装置は、
前記閾値を取得する制御器と、
前記三相交流電動機の各相の電圧値を検出する電圧検出器と、
前記三相交流電動機の各相の電流を検出する電流センサと、
インバータと、
を含んで構成されることを特徴とする交流電動機の制御装置。 - 請求項1乃至12の何れか1項に記載の交流電動機の制御装置と、該制御装置により駆動される交流電動機からなることを特徴とする交流電動機システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013185040A JP6002643B2 (ja) | 2013-09-06 | 2013-09-06 | 制御装置およびそれを用いた交流電動機システム |
| CN201480043410.2A CN105453410B (zh) | 2013-09-06 | 2014-06-30 | 控制装置和使用该控制装置的交流电动机系统 |
| EP14842384.1A EP3043465B1 (en) | 2013-09-06 | 2014-06-30 | Control device and ac electric motor system using same |
| PCT/JP2014/067439 WO2015033651A1 (ja) | 2013-09-06 | 2014-06-30 | 制御装置およびそれを用いた交流電動機システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013185040A JP6002643B2 (ja) | 2013-09-06 | 2013-09-06 | 制御装置およびそれを用いた交流電動機システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015053800A JP2015053800A (ja) | 2015-03-19 |
| JP2015053800A5 JP2015053800A5 (ja) | 2016-01-28 |
| JP6002643B2 true JP6002643B2 (ja) | 2016-10-05 |
Family
ID=52628140
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013185040A Expired - Fee Related JP6002643B2 (ja) | 2013-09-06 | 2013-09-06 | 制御装置およびそれを用いた交流電動機システム |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3043465B1 (ja) |
| JP (1) | JP6002643B2 (ja) |
| CN (1) | CN105453410B (ja) |
| WO (1) | WO2015033651A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10903767B2 (en) | 2017-03-27 | 2021-01-26 | Hitachi Industrial Equipment Systems Co., Ltd. | Synchronous motor control apparatus |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018122991A1 (ja) * | 2016-12-28 | 2018-07-05 | 株式会社日立産機システム | 電力変換装置 |
| JP6324600B1 (ja) * | 2017-07-06 | 2018-05-16 | 北斗制御株式会社 | 電動機の界磁位置検出方法 |
| ES2855140T3 (es) * | 2018-03-08 | 2021-09-23 | Stihl Ag & Co Kg Andreas | Procedimiento para la operación dependiente del tipo, de una unidad eléctrica de accionamiento y un sistema |
| CN112740540A (zh) * | 2018-09-26 | 2021-04-30 | 西门子股份公司 | 用于运行具有转子和软起动器的永磁激励的三相电机的方法和三相电机 |
| TWI697194B (zh) * | 2019-07-04 | 2020-06-21 | 微星科技股份有限公司 | 永磁馬達轉子位置偵測裝置及其方法 |
| CN112865616B (zh) * | 2021-03-16 | 2022-05-24 | 浙江沪龙科技股份有限公司 | 一种抑制无刷直流电机转矩脉动的pwm控制方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5069882B2 (ja) * | 2006-08-30 | 2012-11-07 | 日立アプライアンス株式会社 | 三相コンバータ・インバータ装置及びモジュール |
| JP2008113506A (ja) * | 2006-10-31 | 2008-05-15 | Renesas Technology Corp | モータ駆動制御装置およびモータ起動方法 |
| JP5175569B2 (ja) * | 2008-02-07 | 2013-04-03 | ルネサスエレクトロニクス株式会社 | 同期電動機の駆動システム |
| JP5308109B2 (ja) * | 2008-09-17 | 2013-10-09 | ルネサスエレクトロニクス株式会社 | 同期電動機の駆動システム |
| US8710788B2 (en) * | 2010-03-23 | 2014-04-29 | Hitachi Automotive Systems, Ltd. | Brushless motor drive apparatus and drive method |
| JP2011200058A (ja) * | 2010-03-23 | 2011-10-06 | Hitachi Automotive Systems Ltd | ブラシレスモータの駆動装置 |
| JP5356320B2 (ja) * | 2010-06-24 | 2013-12-04 | 日立オートモティブシステムズ株式会社 | ブラシレスモータの駆動装置 |
| JP5439262B2 (ja) * | 2010-04-02 | 2014-03-12 | 日立オートモティブシステムズ株式会社 | 放電処理装置、放電処理方法、および放電処理プログラム |
| JP5509167B2 (ja) * | 2011-09-08 | 2014-06-04 | 株式会社日立産機システム | 同期電動機の制御システム |
| JP5438081B2 (ja) * | 2011-09-21 | 2014-03-12 | 日立オートモティブシステムズ株式会社 | ブラシレスモータの駆動装置 |
-
2013
- 2013-09-06 JP JP2013185040A patent/JP6002643B2/ja not_active Expired - Fee Related
-
2014
- 2014-06-30 EP EP14842384.1A patent/EP3043465B1/en active Active
- 2014-06-30 CN CN201480043410.2A patent/CN105453410B/zh active Active
- 2014-06-30 WO PCT/JP2014/067439 patent/WO2015033651A1/ja active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10903767B2 (en) | 2017-03-27 | 2021-01-26 | Hitachi Industrial Equipment Systems Co., Ltd. | Synchronous motor control apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105453410B (zh) | 2017-12-15 |
| JP2015053800A (ja) | 2015-03-19 |
| CN105453410A (zh) | 2016-03-30 |
| EP3043465A4 (en) | 2017-11-15 |
| EP3043465A1 (en) | 2016-07-13 |
| EP3043465B1 (en) | 2021-03-24 |
| WO2015033651A1 (ja) | 2015-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6002643B2 (ja) | 制御装置およびそれを用いた交流電動機システム | |
| US9998059B2 (en) | Motor driving apparatus | |
| US9590552B2 (en) | Motor drive device and electric compressor | |
| JP5866429B2 (ja) | 電気機器を制御する方法及び装置 | |
| JPWO2016035298A1 (ja) | モータ駆動装置およびブラシレスモータ | |
| KR102604003B1 (ko) | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 | |
| JP2009077503A (ja) | 電動機の制御装置,空気調和機の制御装置 | |
| KR102362995B1 (ko) | 모터 구동 장치 및 시스템 | |
| US20150102758A1 (en) | Motor drive controller, motor drive control method and motor system using the same | |
| JP4590761B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP6463966B2 (ja) | モータ駆動装置およびモータ駆動用モジュール並びに冷凍機器 | |
| Dianov et al. | Sensorless starting of direct drive horizontal axis washing machines | |
| Suzuki et al. | Minimum current start-up method by combined use of two position-sensorless controls | |
| JP6348779B2 (ja) | 同期電動機の駆動システム | |
| KR20180082128A (ko) | 상전압 검출을 이용한 브러시리스 직류모터 기동 제어방법 및 장치 | |
| JP5975830B2 (ja) | モータ制御装置、およびそれを用いた冷凍機器 | |
| KR20000046679A (ko) | 동기식 리럭턴스 모터의 속도제어 방법 및 장치 | |
| EP2704308A1 (en) | Brushless motor control device and brushless motor control method | |
| JP7150186B2 (ja) | 電動機駆動装置、電動機駆動システム及び冷凍サイクル装置 | |
| Liu et al. | Sensorless control of BLDC motor from zero to low speed based on rotor saliency | |
| JP2019161874A (ja) | モータ制御装置 | |
| JP7433113B2 (ja) | モータ制御装置、モータシステム及びモータ制御方法 | |
| Hu et al. | A novel 180-degree sensorless system of permanent magnet brushless DC motor | |
| Pillai et al. | Efficient Commutation and Torque Ripples Minimization in BLDC Motor for Hoist Applications | |
| WO2022259624A1 (ja) | インバータ制御装置、インバータ制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151203 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160809 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160905 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6002643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |