JP5524896B2 - ブラシレスモータの制御 - Google Patents
ブラシレスモータの制御 Download PDFInfo
- Publication number
- JP5524896B2 JP5524896B2 JP2011090599A JP2011090599A JP5524896B2 JP 5524896 B2 JP5524896 B2 JP 5524896B2 JP 2011090599 A JP2011090599 A JP 2011090599A JP 2011090599 A JP2011090599 A JP 2011090599A JP 5524896 B2 JP5524896 B2 JP 5524896B2
- Authority
- JP
- Japan
- Prior art keywords
- controller
- period
- speed
- voltage
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004804 winding Methods 0.000 claims description 177
- 230000004044 response Effects 0.000 claims description 117
- 238000000034 method Methods 0.000 claims description 32
- 230000008859 change Effects 0.000 claims description 15
- 230000003247 decreasing effect Effects 0.000 claims 1
- 230000001133 acceleration Effects 0.000 description 32
- 230000010363 phase shift Effects 0.000 description 22
- 230000007423 decrease Effects 0.000 description 20
- 101100443272 Arabidopsis thaliana DIR2 gene Proteins 0.000 description 18
- 102100038804 FK506-binding protein-like Human genes 0.000 description 18
- 101001031402 Homo sapiens FK506-binding protein-like Proteins 0.000 description 18
- 239000003990 capacitor Substances 0.000 description 17
- 230000008569 process Effects 0.000 description 16
- 238000005259 measurement Methods 0.000 description 15
- 238000005070 sampling Methods 0.000 description 15
- 230000005284 excitation Effects 0.000 description 10
- 230000004907 flux Effects 0.000 description 10
- 238000012937 correction Methods 0.000 description 9
- 230000005279 excitation period Effects 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 8
- 230000002411 adverse Effects 0.000 description 7
- 230000000737 periodic effect Effects 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000002441 reversible effect Effects 0.000 description 5
- 230000001360 synchronised effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 230000001052 transient effect Effects 0.000 description 3
- 230000005355 Hall effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 238000009529 body temperature measurement Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000009499 grossing Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 230000033228 biological regulation Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 238000011068 loading method Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
Images





























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
- H02P6/085—Arrangements for controlling the speed or torque of a single motor in a bridge configuration
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/34—Modelling or simulation for control purposes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/15—Controlling commutation time
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/26—Arrangements for controlling single phase motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2209/00—Indexing scheme relating to controlling arrangements characterised by the waveform of the supplied voltage or current
- H02P2209/07—Trapezoidal waveform
Description
コントローラ16は、HALL信号のエッジに応答して相巻線7を整流する。整流は、相巻線7を通る電流の方向を逆にするようにDIR1及びDIR2を逆にすることを伴っている(すなわち、DIR1をクリアしてDIR2を設定するか、又はDIR2をクリアしてDIR1を設定する)。相巻線7は、整流の時点でフリーホイールさせることができる。従って、DIR1及びDIR2を逆にすることに加えて、コントローラ16は、FREEHWEEL#を設定する。
所定の速度閾値SPEED_ADVよりも小さいと、コントローラ16は、HALL信号のエッジと同期して相巻線7を整流する。HALL信号の各エッジは、相巻線7内の逆起電力の極性の変化を表している。その結果、SPEED_ADV未満の速度で、コントローラ16は逆EMFのゼロ交差と同期して相巻線7を整流する。
速度閾値SPEED_ADVでの又はそれを超える速度で、コントローラ16は、進み期間(advance period)T_ADVによりHALL信号の各エッジの前に相巻線7を整流する。電気半サイクル期間は減少し、逆起電力は回転子速度と共に増加するので、整流がHALL信号のエッジの前に起こる電気角度は、理想的に回転子速度と共に増加する。特定の進み期間T_ADVに対して、対応する進み角度(advance angle)A_ADVは、以下のように定めることができる。
A_ADV(elec.deg)=T_ADV(sec)*{ω(rpm)/60}*360(mech.deg)*n/2
ここで、A_ADVは電気角度での進み角であり、T_ADVは、秒単位の進み期間であり、ωはrpm単位の回転子速度であり、nは回転子極の個数である。この方程式から、進み角が直接に回転子速度に比例していることが見出される。その結果、固定進み期間に対してさえも、進み角は、回転子速度と共に増加する。しかし、加速、電力及び効率の制御の有効化は、異なる回転子速度で異なる進み期間を使用することによって達成することができる。コントローラ16は、従って、複数の回転子速度の各々に対して進み期間を格納する進みルックアップテーブルを含む。
ω(rpm)=60/{n*T_HALL(sec)}
ここで、ωはrpm単位の回転子の速度であり、T_HALLは秒単位のホール期間であり、nは回転子の極の個数である。コントローラ16は、選択された進み期間を使用してHALL信号のエッジより前に相巻線7を整流する。同じ進み期間T_ADVは、次に、Z_CROSS信号の更に別のエッジのような時間が検出されるまでコントローラ16によって使用される。Z_CROSS信号の更に別のエッジに応答して、コントローラ16は、回転子5の速度に対応する新たな進み期間を進みルックアップテーブルから選択する。進み期間は、従って、AC電源4の電圧がゼロと交差する時に限り更新され、AC電源4の各半サイクルにわたって一定である。
T_COM=T_HALL−T_ADV
コントローラ16のいくつかの周辺機器19は、電流レギュレータ22を形成するように構成されている。電流レギュレータ22は、相巻線7内の電流をモニタ及び調整する。電流レギュレータ22は、2つの機能を実行する。第1に、相巻線7内の電流がフェイルセーフ閾値を上回った場合、電流レギュレータ22は、TRIP#をクリアする。第2に、相巻線7内の電流が過電流閾値を上回った場合、電流レギュレータ22は、過電流信号を生成する。
マルチスイッチモード内の過電流イベントに応答して、コントローラ16は、FREEHWEEL#をクリアすることによって相巻線7をフリーホイールさせる。フリーホイールは、フリーホイール期間T_FWにわたって続き、その間に、相巻線7内の電流は、過電流閾値よりも小さいレベルに減衰するように意図されている。相巻線7内の電流が過電流閾値よりも大きい状態を続ける場合、コントローラ16は、フリーホイール期間T_FWにわたって再び相巻線7をフリーホイールさせる。一方、相巻線7内の電流が過電流閾値未満に落ちた場合、コントローラ16は、FREEWHEEL#を設定することによって相巻線7の励起を再開する。
A_FW(elec.deg)=T_FW(sec)*{ω(rpm)/60}*360(mech.deg)*n/2
ここで、A_FWは電気角度でのフリーホイール角度であり、T_FWは秒単位でのフリーホイール期間であり、ωはrpmでの回転子速度であり、nは回転子極の個数である。その結果、一定のフリーホイール期間が得られるように、対応するフリーホイール角度は、回転子速度と共に増加する。しかし、フリーホイール角度が増加すると、電流及び従って電力が相巻線7に駆動される残りの期間は減少する。コントローラ16は、従って、回転子5が加速する時に対応するフリーホイール角度A_FWが過度に増大しないように、増加する回転子速度と共に減少するフリーホイール期間T_FWを使用している。
シングルスイッチモード内の過電流イベントに応答して、コントローラ16は、相巻線7を直ちにはフリーホイールさせない。代替的に、コントローラ16は、オーバーラン期間T_OVRにわたって相巻線7を励起し続ける。オーバーラン期間が経過した後、コントローラ16は、FREEHWEEL#をクリアすることによって相巻線7をフリーホイールさせる。フリーホイールは、次に、コントローラ16が相巻線7を整流するような時間まで無期限に続く。コントローラ16は、従って、モータ2の各電気半サイクル中に一度だけ励起からフリーホイールに相巻線7を切り換える。
T_OVR=T_OVR_OFFSET+T_OVR_AMP*abs{sin(θ)}
ここで、T_OVR_OFFSETはオフセット値であり、T_OVR_AMP*abs{sin(θ)}はT_OVR_AMPによって定められる振幅を有する整流正弦波であり、θはAC電源4の電圧周期内での角度である。
θ(deg)=t(sec)*f(Hz)*360(deg)
ここで、tは、AC電源4内のゼロ交差以来の秒単位の経過した時間であり、fは、AC電源4のヘルツでの周波数である。オーバーラン期間は、次に、以下のように定めることができる。
T_OVR=T_OVR_OFFSET+T_OVR_AMP*abs{sin(t*f*360deg)}
T_OVR=T_OVR_OFFSET+T_OVR_SINE
ここで、T_OVR_OFFSETは時間とは独立しているオーバーランオフセット値であり、T_OVR_SINEは時間に依存するオーバーラン正弦値である。
回転子速度に関わらず、過電流イベントは、モータ2の各電気半サイクル中に少なくとも一回起こる。過電流イベントが起こらなかった場合、コントローラ16は相巻線7を励起し続け、従って、相巻線7内の電流は、上がり続ける。比較的高い回転子速度では、相巻線7内の逆起電力のマグニチュードは、比較的大きい。従って、相巻線7内の電流は、過電流イベントがない場合でさえ過大レベルに到達する可能性は低い。しかし、比較的低回転子速度では、相巻線7内で誘導される逆起電力は、比較的小さい。従って、相巻線7内の電流は、過電流イベントがない場合、過大なレベルに上がる場合がある。実際、電流は、フェイルセーフ閾値I_MAXまで上がる恐れがあり、それによって、次に、コントローラ16は、故障モードに入る。その結果、マルチスイッチモードで作動する時、コントローラ16は、相巻線7がタイムアウト期間T_TOにわたって絶えず同じ方向に励起された後に自動的に過電流ルーチンを実行する。タイムアウト期間は、従って、確実に相巻線7を励起することができる最大期間が制限されるようにすることにより、フェイルセーフ機構として作用する。
A_TO(dec.deg)=T_TO(sec)*{ω(rpm)/60}*360(mech.deg)*n/2
ここで、A_TOは電気角度でのタイムアウト角度であり、T_TOは秒単位のタイムアウト期間であり、ωはrpmでの回転子速度であり、nは回転子極の個数である。その結果、一定のタイムアウト期間にわたって、対応するタイムアウト角度は、回転子速度と共に線形に増加する。コントローラ16は、従って、一定のタイムアウト期間T_TOを使用することができる。しかし、コントローラ16が異なる回転子速度に対して異なるタイムアウト期間を使用する場合、より良好な制御をもたらすことができる。コントローラ16は、従って、複数の回転子速度の各々に対してタイムアウト期間T_TOを格納するタイムアウトルックアップテーブルを含む。
コントローラ16は、主として進み整流シングルスイッチモードで作動する。このモードで、回転子5の速度は、回転子5が異なる負荷を受ける時に変化する。回転子速度が変わるように、相巻線7内で誘導される逆起電力のマグニチュードも変化する。コントローラ16が仮に固定進み期間及びオーバーラン期間を使用した場合、システム1の平均入力電力及び平均出力電力は、回転子速度と共に変化する。しかし、特定の速度範囲にわたって一定の平均入力又は出力電力を維持するモータシステム1を有することが望ましい用途があると考えられる。
T_ADV=T_ADV_TABLE[速度、電圧]
T_OVR=T_OFFSET_TABLE[速度、電圧]+T_OVR_SINE_TABLE[t]
コントローラ16の周辺機器19には、複数のチャンネルを有するアナログ/デジタル変換器(ADC)がある。ADCの第1のチャンネルはDC_SMOOTH信号の入力ピンに結合され、ADCの第2のチャンネルは、TEMP信号の入力ピンに結合されている。
コントローラ16の記憶装置18は、いくつかのルックアップテーブルを格納し、各々は、特定の速度及び/又は電圧分解能を有する。各ルックアップテーブルの分解能は、他のルックアップテーブルと同じである必要がなく、かつルックアップテーブルにわたって変わる場合がある。例えば、進みルックアップテーブルは、比較的低速度では10krpm毎に進み期間を格納することができ、これは、徐々に、比較的高い速度では1krpmに増加する。
静止から運転速度まで加速する時のモータシステムの作動をここで説明する。図8から分るように、コントローラ16は、6つの作動モード、すなわち、初期化、静止、低速加速、高速加速、運転、及び故障を有する。様々な作動モードで、コントローラ16は、以下の4つのパラメータ、すなわち、フリーホイール期間、進み期間、オーバーラン期間、及びタイムアウト期間の1つ又はそれよりも多くを使用してモータ2を制御する。
電源投入で、コントローラ16は、周辺機器19を有効にし、モータシステム1内のAC電源4及び温度のRMS電圧の尺度又は測定値を得るためにDC_SMOOTH信号及びTEMP信号をサンプリングする。RMS電圧が不足電圧閾値V_MINよりも小さいか、又は過電圧閾値V_MAXを超える場合、コントローラ16は、記憶装置18に「不足電圧」又は「過電圧」エラーを書き込んで故障モードに入る。同様に、温度が不足温度閾値TEMP_MINよりも小さいか、又は過温度閾値TEMP_MAXを超える場合、コントローラ16は、記憶装置18に「不足温度」又は「過温度」エラーを書き込んで故障モードに入る。
コントローラ16は、所定の逆駆動時間T_RDにわたって逆にモータ2を駆動する。この説明上、モータ2は、HALL信号が論理的に低い時に左から右に、HALL信号が論理的に高い時に右から左に相巻線7を駆動することに応答して前方へ駆動されると仮定されている。モータ2は、従って、図9に詳細に示すように、HALL信号が論理的に低い時に右から左に、HALL信号が論理的に高い時に左から右に相巻線7を駆動することに応答して逆に駆動される。
低速加速モードで作動する時、コントローラ16は、同期整流マルチスイッチモードでモータ2を駆動する。図10は、いくつかのホール期間にわたるHALL信号、制御信号、及び相電流の波形を示している。
高速加速モードで作動する時、コントローラ16は、進み整流マルチスイッチモードでモータ2を駆動する。図11は、いくつかのホール期間にわたるHALL信号、制御信号、及び相電流の波形を示している。
運転モードで作動する時、コントローラ16は、進み整流シングルスイッチモードでモータ2を駆動する。図12は、いくつかのホール期間にわたるHALL信号、制御信号、及び相電流の波形を示している。
コントローラ16は、モータシステム1の損傷を防止又は制限するためにエラーに応答して故障モードに入る。コントローラ16は、従って、故障モードに入るとDIR1及びDIR2をクリアすることによってモータ2を無効にする。コントローラ16では、モータシステム1を再利用することができる前に、モータシステム1に至る電源を切断することが必要である場合がある。代替的に、コントローラ16は、モータシステム1の更に別の使用を妨げる恐れがあり、これは、起こった故障の種類に依存する場合がある。
AC電源により駆動される従来の永久磁石モータに対して、相巻線内の誘導される逆起電力により、AC電源から引き出される電流の量を正確に制御することが困難になる。従って、AC電源から引き出される電流の波形は、一般的に高い高調波コンテンツを有し、従って、力率不良になる。この問題に対処するために、従来の永久磁石モータは、一般的に能動力率補正(PFC)回路を含む。能動PFC回路は、AC電源から引き出される電流が実質的に正弦波であることを保証しながら相巻線を励起する際に使用される規則的なDC電圧を出力する。従って、比較的高い力率をもたらすことができる。しかし、能動PFC回路の介在により、モータシステムの経費が増大する。更に、PFC回路には、PFC回路によりサンプリングされるDCリンク電圧が安定であるために高いキャパシタンスDCリンクコンデンサが必要である。安定したDCリンク電圧がなければ、PFC回路は、誤った電流要求レベルを推定し、電流高調波不良になる。しかし、高キャパシタンスDCリンクコンデンサは、物理的に大きくかつ高価である。
コントローラ16は、異なるイベントに応答して異なるソフトウエアルーチンを実行する。例えば、コントローラ16は、HALL信号のエッジに応答して特定のルーチンを実行する。コントローラ16は、過電流イベントなどに応答して異なるルーチンを実行する。
イベント処理の一般的な方法は、割り込みを使用するものである。割り込みに応答して、コントローラ16は、メインコードの実行を中断し、割り込みサービスルーチン(ISR)を実行することによって割り込みに供される。
無制限フリーホイールシングルスイッチモードで作動する時、過電流割り込みは無効にされ、すなわち、コントローラ16は、電流レギュレータ22により出力された過電流信号を無視する。HALL信号のエッジに応答して、コントローラ16は整流期間T_COMに加えて導通期間T_CDを計算する。HALL信号のエッジの後、コントローラ16は時間T_COMで相巻線7を整流する。整流後、コントローラ16は、導通期間T_CDにわたって相巻線7を励起し、次に、コントローラ16は、相巻線7をフリーホイールさせる。
T_CD=T_CD_OFFSET+T_CD_AMP*abs{sin(θ+A_CD_PHASE)}
ここで、T_CD_OFFSETはオフセット値であり、T_CD_AMP*abs{sin(θ+A_CD_PHASE)}は、T_CD_AMPによって定められた振幅を有する整流正弦波である。θはAC電源4の電圧サイクル内の角度であり、A_CD_PHASEは位相角である。
θ(deg)=t(sec)*f(Hz)*360(deg)
A_CD_PHASE(deg)=T_CD_PHASE(sec)*f(Hz)*360(deg)
T_CD=T_CD_OFFSET+T_CD_AMP*abs{sin({t+T_CD_PHASE)*f*360deg)}
T_CD=T_CD_OFFSET+T_CD_SINE
ここで、TCD_OFFSETは、時間とは独立している導通オフセット値であり、T_CD_SINEは、時間に依存する導通正弦値である。
T_ADV=T_ADV_TABLE[速度、電圧]
T_CD_OFFSET=T_CD_OFFSET_TABLE[速度、電圧]
T_CD=T_CD_OFFSET_TABLE[速度、電圧]+T_CD_SINE_TABLE[t+TCD_PHASE_SHIFT[速度、電圧]]
T_COM_ISR<T_ADV<T_HALL−T_HALL_ISR
無制限フリーホイールシングルスイッチモードの場合と同様に、過電流割り込みは、制限フリーホイールシングルスイッチモードで作動する時に無効にされる。HALL信号のエッジに応答して、コントローラ16は、整流期間T_COMに加えて、ドライブオフ期間T_DOFFを計算する。コントローラ16は、次に、ドライブオフ期間T_DOFFにわたって相巻線7を励起し続け、次に、コントローラ16は、相巻線7をフリーホイールさせる。フリーホイールは、次に、コントローラ16が相巻線7を整流するまで続く。
T_DOFF=T_DOFF_OFFSET+T_DOFF_AMP*abs{sin(θ+A_DOFF_PHASE)}
ここで、T_DOFF_OFFSETは、オフセット値であり、T_DOFF_AMP*abs{sin(θ+A_DOFF_PHASE)}は、T_DOFF_AMPによって定められた振幅を有する整流正弦波である。θは、AC電源4の電圧サイクル内の角度であり、A_DOFF_PHASEは位相角である。
θ(deg)=t(sec)*f(Hz)*360(deg)
A_DOFF_PHASE(deg)=T_DOFF_PHASE(sec)*f(Hz)*360(deg)
T_DOFF=T_DOFF_OFFSET+T_DOFF_AMP*abs{sin({t+T_OVR_PHASE}*f*360deg)}
T_DOFF=T_DOFF_OFFSET+T_DOFF_SINE
ここで、T_DOFF_OFFSETは、時間とは独立したドライブオフオフセット値であり、T_DOFF_SINEは、時間に依存するドライブオフ正弦値である。
T_DOFF=T_DOFF_OFFSET_TABLE[速度、電圧]+T_DOFF_SINE_TABLE[t+T_DOFF_PHASE_SHIFT[速度、電圧]]
上述の3つの方式の各々においては、コントローラ16は、モータ2の各電気半サイクルにわたって導通期間T_CDにわたって相巻線7を励起する。
T_CD=T_OC+T_OVR
ここで、T_OCは、相巻線7内の電流が過電流閾値に到達するために掛かる時間であり、T_OVRは、オーバーラン期間である。その結果、導通期間T_CDは、以下のように定めることができる。
T_CD=T_OC+T_OVR_OFFSET+T_OVR_SINE
T_CD=T_CD_OFFSET+T_CD_SINE
T_CD=T_ADV+T_DOFF
ここで、T_ADVは進み期間であり、T_DOFFはドライブオフ期間である。その結果、導通期間T_CDは、以下のように定めることができる。
T_CD=T_ADV+T_DOFF_OFFSET+T_DOFF_SINE
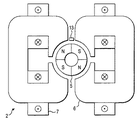
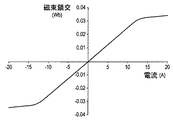
モータシステム1の特定的な実施形態を一例としてのみここで説明する。モータシステム1の様々なハードウエア構成要素の値は、図19に詳細に示されており、一方、図20は、コントローラ16により使用される様々な定数及び閾値を示している。図21及び22は、リンク誘導子L1及びモータ2の磁束鎖交特性を詳細に示している。
T_ADV=T_ADV_OFFSET−T_ADV_AMP*abs{sin({t*f*360deg)}
2 ブラシレスモータ
3 制御システム
4 AC電源
Claims (4)
- ブラシレスモータを制御する方法であって、
交流電圧を整流して整流電圧を供給する段階と、
進み期間だけ所定の回転子位置に先行してモータの巻線を前記整流電圧で励起する段階と、を含み、
前記進み期間は、前記交流電圧の各半サイクルにわたって一定であり、
前記方法は、前記交流電圧のゼロ交差に応答して前記進み期間を更新する段階を含むことを特徴とする方法。 - 前記進み期間を更新する段階は、モータ速度及び前記交流電圧のRMS値のうちの一方の変化に応答して該進み期間を調節する段階を含むことを特徴とする請求項1に記載の方法。
- 前記進み期間を調節する段階は、前記モータ速度の増加及び前記RMS値の減少のうちの一方に応答して該進み期間を増加させる段階を含むことを特徴とする請求項2に記載の方法。
- 同じ進み期間を使用して、前記交流電圧の1つの半サイクルに及ぶ前記モータの電気サイクルの各半分に対して前記巻線を励起する段階を含むことを特徴とする請求項1から請求項3のいずれか1項に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1006396.4 | 2010-04-16 | ||
| GBGB1006396.4A GB201006396D0 (en) | 2010-04-16 | 2010-04-16 | Control of a brushless motor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011229385A JP2011229385A (ja) | 2011-11-10 |
| JP5524896B2 true JP5524896B2 (ja) | 2014-06-18 |
Family
ID=42245338
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011090599A Active JP5524896B2 (ja) | 2010-04-16 | 2011-04-15 | ブラシレスモータの制御 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8742707B2 (ja) |
| EP (1) | EP2559151B1 (ja) |
| JP (1) | JP5524896B2 (ja) |
| KR (2) | KR20140110027A (ja) |
| CN (1) | CN102948067B (ja) |
| GB (3) | GB201006396D0 (ja) |
| WO (1) | WO2011128685A2 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5571349B2 (ja) * | 2009-03-02 | 2014-08-13 | 花王株式会社 | 液体洗浄剤組成物 |
| GB201006388D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of brushless motor |
| GB201006390D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006384D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006391D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless permanent-magnet motor |
| GB201006392D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Controller for a brushless motor |
| GB201006398D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006386D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006397D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006395D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006394D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Controller for a brushless motor |
| GB201006387D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB2484289B (en) | 2010-10-04 | 2013-11-20 | Dyson Technology Ltd | Control of an electrical machine |
| CN103843243B (zh) | 2012-03-12 | 2016-09-07 | 松下电器产业株式会社 | 电动机驱动方法以及电动机驱动装置 |
| US9628005B2 (en) | 2013-03-28 | 2017-04-18 | Nxp Usa, Inc. | Device for determining a position of a rotor of an electric motor |
| JP6485922B2 (ja) * | 2014-01-09 | 2019-03-20 | ベックマン コールター, インコーポレイテッド | 回生ブレーキシステム |
| CN106849772A (zh) * | 2015-12-07 | 2017-06-13 | 德昌电机(深圳)有限公司 | 电机控制系统、控制方法及吸尘器 |
| US10718105B2 (en) | 2017-03-02 | 2020-07-21 | Kohler Co. | Handwashing station |
| GB2575645B (en) * | 2018-07-17 | 2020-09-30 | Dyson Technology Ltd | A method of controlling a brushless permanent magnet motor |
Family Cites Families (154)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3781620A (en) | 1971-02-01 | 1973-12-25 | Union Carbide Corp | Full wave governor control system |
| US3737748A (en) | 1971-11-03 | 1973-06-05 | Sarns Inc | Motor speed control circuit with unijunction transistor line voltage compensation |
| US3809984A (en) | 1973-01-29 | 1974-05-07 | Allied Controls Co Inc | Motor speed control system |
| US3908158A (en) | 1973-05-09 | 1975-09-23 | Borg Warner | Control system for adjusting a-c motor speed at line frequency or a subharmonic of the line frequency |
| US4039913A (en) | 1976-02-26 | 1977-08-02 | Battelle Development Corporation | Universal electric motor speed control |
| US4266177A (en) | 1979-06-01 | 1981-05-05 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Power factor control system for AC induction motors |
| US4250435A (en) | 1980-01-04 | 1981-02-10 | General Electric Company | Clock rate control of electronically commutated motor rotational velocity |
| US4323835A (en) | 1980-03-05 | 1982-04-06 | The Scott & Fetzer Company | Simplified power factor controller for induction motor |
| US4556827A (en) | 1980-04-17 | 1985-12-03 | General Electric Company | Laundering apparatus, method of operating a laundry machine, control system for an electronically commutated motor, method of operating an electronically commutated motor, and circuit |
| US4413217A (en) | 1980-07-07 | 1983-11-01 | Cynex Manufacturing Corporation | Power factor controller |
| US4465957A (en) | 1981-06-11 | 1984-08-14 | Teccor Electronics, Inc. | Circuit and method for controlling speed of an alternating current motor |
| US4486700A (en) | 1983-05-09 | 1984-12-04 | Texas Instruments Incorporated | Universal single phase motor starting control apparatus |
| US4558264A (en) | 1984-10-18 | 1985-12-10 | General Electric Company | Current control method and circuit for electronically-commutated motors |
| US4746844A (en) | 1985-07-16 | 1988-05-24 | Maghemite Inc. | Control and operation of brushless continuous torque toroid motor |
| US4875148A (en) | 1988-12-16 | 1989-10-17 | Sundstrand Corporation | Control for producing a low magnitude voltage at the output of a PWM inverter |
| US5008608A (en) | 1989-12-26 | 1991-04-16 | Allen-Bradley Company, Inc. | Controller for starting and stopping electric motors |
| US5055751A (en) | 1989-01-24 | 1991-10-08 | Mackelvie John S | Brushless motor control system |
| US5187419A (en) | 1991-05-06 | 1993-02-16 | Allen-Bradley Company, Inc. | Electric motor control apparatus and method |
| US5156005A (en) | 1991-05-24 | 1992-10-20 | Sunpower, Inc. | Control of stirling cooler displacement by pulse width modulation of drive motor voltage |
| IT1254734B (it) | 1992-03-24 | 1995-10-10 | Faac Spa | Metodo e dispositivo per il controllo della velocita' di motori asincroni |
| US5420492A (en) | 1993-01-14 | 1995-05-30 | Emerson Electric Co. | Method and apparatus of operating a dynamoelectric machine using DC bus current profile |
| AU5503194A (en) | 1993-02-22 | 1994-08-25 | General Electric Company | Single phase electronically commutated motor system and method |
| US5448141A (en) * | 1994-03-18 | 1995-09-05 | North Carolina State University | Adjustable speed drive for residential applications |
| US5457375A (en) | 1994-05-27 | 1995-10-10 | Emerson Electric Co. | Sensorless commutation controller for a poly-phase dynamoelectric machine |
| US5581169A (en) | 1994-08-31 | 1996-12-03 | Allen-Bradley Company, Inc. | Apparatus used with an inverter/converter eliminating unintended voltage pulses |
| US5577235A (en) | 1994-08-31 | 1996-11-19 | Microchip Technologies, Inc. | Microcontroller with multiple timing functions available in a single peripheral module |
| JP3458523B2 (ja) * | 1994-12-07 | 2003-10-20 | 三菱電機株式会社 | モータ装置・モータの駆動装置及びその制御方法 |
| US5652493A (en) | 1994-12-08 | 1997-07-29 | Tridelta Industries, Inc. (Magna Physics Division) | Polyphase split-phase switched reluctance motor |
| US6087654A (en) | 1995-02-27 | 2000-07-11 | Opto Generic Devices, Inc. | Encoder apparatus and methods |
| US5986417A (en) | 1995-04-26 | 1999-11-16 | Sgs-Thomson Mocroelectronics S.A. | Sensorless universal motor speed controller |
| US6323609B1 (en) | 1995-06-07 | 2001-11-27 | Stmicroelectronics, Inc. | Alternate high-side/low-side PWM operation of brushless motors |
| GB2305033A (en) | 1995-08-25 | 1997-03-26 | Norcroft Dynamics Ltd | Controlling brushless dc motors |
| DE19533452B4 (de) | 1995-09-09 | 2005-02-17 | Fev Motorentechnik Gmbh | Verfahren zur Anpassung einer Steuerung für einen elektromagnetischen Aktuator |
| JP3555274B2 (ja) * | 1995-09-25 | 2004-08-18 | 松下電器産業株式会社 | 動力発生装置 |
| US5929577A (en) * | 1995-10-13 | 1999-07-27 | Unitrode Corporation | Brushless DC motor controller |
| JPH09117186A (ja) * | 1995-10-13 | 1997-05-02 | Zexel Corp | 直流ブラシレスモータ駆動装置 |
| JPH09117183A (ja) * | 1995-10-18 | 1997-05-02 | Matsushita Electric Ind Co Ltd | 動力発生装置 |
| US6198238B1 (en) | 1995-12-07 | 2001-03-06 | Borealis Technical Limited | High phase order cycloconverting generator and drive means |
| JPH09294389A (ja) * | 1996-04-24 | 1997-11-11 | Matsushita Electric Ind Co Ltd | 動力発生装置とこれを使用する掃除機 |
| US5739652A (en) | 1996-12-20 | 1998-04-14 | General Motors Corporation | Method and apparatus for sensorless operation of brushless permanent magnet motors |
| AUPO478297A0 (en) | 1997-01-24 | 1997-02-20 | Commonwealth Scientific And Industrial Research Organisation | Improvements in high speed electric motors |
| JP3656412B2 (ja) | 1998-07-03 | 2005-06-08 | 株式会社日立製作所 | 車両用電力制御装置 |
| DE19843106B4 (de) * | 1998-09-21 | 2005-08-18 | Ebm-Papst Mulfingen Gmbh & Co. Kg | System zur Drehzahlsteuerung von Wechselstrom-Motoren |
| CA2249927C (en) | 1998-10-09 | 2006-12-19 | Celestica North America Inc. | Multifunction processor timer |
| EP1022844A3 (en) * | 1999-01-19 | 2002-04-17 | Matsushita Electric Industrial Co., Ltd. | Power supply device and air conditioner using the same |
| JP2000278955A (ja) * | 1999-01-19 | 2000-10-06 | Matsushita Electric Ind Co Ltd | 電源装置及びこの電源装置を用いた空気調和機 |
| US6221291B1 (en) | 1999-02-26 | 2001-04-24 | Lear Corporation | Method for making a preform |
| JP4383576B2 (ja) | 1999-04-20 | 2009-12-16 | 株式会社東芝 | 電気掃除機およびインバータ装置 |
| US7138776B1 (en) * | 1999-07-08 | 2006-11-21 | Heartware, Inc. | Method and apparatus for controlling brushless DC motors in implantable medical devices |
| JP4194204B2 (ja) | 2000-02-16 | 2008-12-10 | 三洋電機株式会社 | Dcブラシレスモータ装置 |
| US6236179B1 (en) | 2000-02-21 | 2001-05-22 | Lockheed Martin Energy Research Corporation | Constant power speed range extension of surface mounted PM motors |
| US20010011879A1 (en) | 2000-03-09 | 2001-08-09 | Erdman David M. | Multi-speed motor control |
| FR2807890B1 (fr) * | 2000-04-18 | 2002-06-07 | Seb Sa | Moteur a angle d'avance de phase |
| JP3658310B2 (ja) | 2000-11-16 | 2005-06-08 | 東芝テック株式会社 | Pwm制御回路、電動送風機及び電気掃除機 |
| DE10161993A1 (de) | 2000-12-28 | 2002-07-04 | Papst Motoren Gmbh & Co Kg | Verfahren zum Regeln eine physikalischen Größe bei einem elektronisch kommutierten Motor, und Motor zur Durchführung eines solchen Verfahrens |
| JP2002345286A (ja) | 2001-05-18 | 2002-11-29 | Kunio Seki | 3相半波駆動ブラシレスモータの駆動装置 |
| JP2002369573A (ja) | 2001-06-07 | 2002-12-20 | Kunio Seki | ブラシレスモータ駆動装置 |
| DE10134454A1 (de) | 2001-07-16 | 2003-02-13 | Hilti Ag | Steuerverfahren und Schaltung zum Abbremsen eines elektronisch kommutierten Elektromotors |
| US6621291B2 (en) | 2001-08-15 | 2003-09-16 | Eaton Corporation | Device and method for estimating the resistance of a stator winding for an AC induction motor |
| JP3666432B2 (ja) | 2001-09-20 | 2005-06-29 | 株式会社デンソー | 電力変換装置及び多相負荷の駆動制御方法 |
| GB2380623B (en) | 2001-10-05 | 2003-11-12 | Minebea Co Ltd | Motor control circuit overcurrent protection |
| US6906503B2 (en) * | 2002-01-25 | 2005-06-14 | Precor Incorporated | Power supply controller for exercise equipment drive motor |
| US6664756B2 (en) | 2002-04-25 | 2003-12-16 | Sunonwealth Electric Machine Industry Co., Ltd. | Conversion circuit for a DC brushless motor |
| US7202622B2 (en) | 2002-04-30 | 2007-04-10 | International Rectifier Corporation | Method for controlling an electric motor to reduce EMI |
| US6901212B2 (en) | 2002-06-13 | 2005-05-31 | Halliburton Energy Services, Inc. | Digital adaptive sensorless commutational drive controller for a brushless DC motor |
| ES2197822B1 (es) | 2002-06-18 | 2005-09-16 | Fagor, S. Coop. | Dispositivo electronico para el control de un motor sincrono con rotor de iman permanente. |
| US6977492B2 (en) | 2002-07-10 | 2005-12-20 | Marvell World Trade Ltd. | Output regulator |
| US7012391B2 (en) | 2002-08-09 | 2006-03-14 | Seagate Technology Llc | Motor acceleration using continuous sequence of current limit values |
| US6803741B2 (en) | 2002-09-16 | 2004-10-12 | Rockwell Automation Technologies, Inc. | Motor controller |
| US6847186B1 (en) | 2002-10-18 | 2005-01-25 | Raser Technologies, Inc. | Resonant motor system |
| US7034498B2 (en) | 2002-10-18 | 2006-04-25 | Rt Patent Company, Inc. | Resonant motor system |
| JP2004274975A (ja) | 2003-03-12 | 2004-09-30 | Calsonic Kansei Corp | Pwm駆動装置 |
| US7646155B2 (en) | 2003-04-30 | 2010-01-12 | Balck & Decker Inc. | Generic motor control system |
| CN100448158C (zh) | 2003-04-30 | 2008-12-31 | 松下电器产业株式会社 | 电动机驱动装置 |
| US7102303B2 (en) | 2003-04-30 | 2006-09-05 | Black & Decker Inc. | Generic motor control system and method |
| US7042183B2 (en) | 2003-07-18 | 2006-05-09 | The Chamberlain Group, Inc. | Barrier movement operator speed control |
| AU2003903787A0 (en) | 2003-07-22 | 2003-08-07 | Sergio Adolfo Maiocchi | A system for operating a dc motor |
| GB2410847A (en) | 2004-02-05 | 2005-08-10 | Dyson Ltd | Control of motor winding energisation according to rotor angle |
| GB2410848A (en) * | 2004-02-05 | 2005-08-10 | Dyson Ltd | Voltage compensation in switched reluctance motor |
| JP4565466B2 (ja) | 2004-02-26 | 2010-10-20 | ルネサスエレクトロニクス株式会社 | モータ駆動装置及びモータ駆動用集積回路装置 |
| GB2413905B (en) | 2004-05-05 | 2006-05-03 | Imra Europ S A S Uk Res Ct | Permanent magnet synchronous motor and controller therefor |
| US7751210B2 (en) | 2004-06-25 | 2010-07-06 | Panasonic Corporation | Inverter device with improved 3-phase pulse width modulation and vehicle air conditioner using the same |
| US7567047B2 (en) * | 2004-06-30 | 2009-07-28 | Hamilton Sundstrand Corporation | Electric motor control strategies for using a low resolution position sensor |
| US7141949B2 (en) | 2005-03-07 | 2006-11-28 | Fisher & Paykel Appliances Limited | Low noise back EMF sensing brushless DC motor |
| TW200635182A (en) | 2005-03-28 | 2006-10-01 | Delta Electronics Inc | Control method and control circuit for brushless direct current motor |
| DE102005016855A1 (de) | 2005-04-12 | 2006-10-19 | Siemens Ag | Schnittstellenmodul zur Anordnung in oder an einem Motor |
| US7330004B2 (en) | 2005-06-06 | 2008-02-12 | Lutron Electronics Co., Inc. | Method and apparatus for quiet variable motor speed control |
| CA2613614A1 (en) | 2005-07-06 | 2007-01-11 | Nicholas Piramal India Limited | Novel intermediates, process for their preparation and process for the preparation of coq10 employing the said novel intermediates |
| JP4736668B2 (ja) | 2005-09-26 | 2011-07-27 | 株式会社デンソー | 負荷駆動装置の信号検出装置 |
| US7477034B2 (en) | 2005-09-29 | 2009-01-13 | Agile Systems Inc. | System and method for commutating a motor using back electromotive force signals |
| JP2007110779A (ja) | 2005-10-11 | 2007-04-26 | Matsushita Electric Ind Co Ltd | モータ駆動装置および駆動方法 |
| DE502006003594D1 (de) | 2005-11-11 | 2009-06-10 | Ebm Papst St Georgen Gmbh & Co | Verfahren und Anordnung zur Kommutierung eines elektronisch kommutierten Motors |
| US7489094B2 (en) | 2005-11-18 | 2009-02-10 | Lutron Electronics Co., Inc. | Method and apparatus for quiet fan speed control |
| US7466089B2 (en) | 2005-12-01 | 2008-12-16 | Regal Beloit Corporation | Methods and systems for controlling an electronically commutated motor |
| JP4497149B2 (ja) | 2005-12-16 | 2010-07-07 | パナソニック株式会社 | インバータ装置 |
| ATE392041T1 (de) | 2006-02-04 | 2008-04-15 | Diehl Ako Stiftung Gmbh & Co | Verfahren und vorrichtung zur regelung eines mehrphasigen, elektronisch kommutierten motors |
| US8073549B2 (en) | 2006-02-28 | 2011-12-06 | University Of South Florida | Method of electrogenically controlling pump molecules |
| EP1837986B1 (de) | 2006-03-24 | 2018-12-19 | ebm-papst St. Georgen GmbH & Co. KG | Verfahren und Anordnung zum Betrieb eines elektronisch kommutierten Motors |
| JP4697017B2 (ja) | 2006-04-14 | 2011-06-08 | 株式会社デンソー | 多相回転電機の制御装置 |
| JP4192979B2 (ja) | 2006-08-31 | 2008-12-10 | ダイキン工業株式会社 | モータ制御装置 |
| FR2909237B1 (fr) | 2006-11-28 | 2009-03-06 | Valeo Equip Electr Moteur | Procede et dispositif de regulation d'une machine electrique tournante polyphasee fonctionnant en generatrice, et machine electrique tournante polyphasee les utilisant |
| DE102006062354A1 (de) | 2006-12-22 | 2008-06-26 | Andreas Stihl Ag & Co. Kg | Antriebsanordnung für ein portables Arbeitsgerät |
| JP2008188264A (ja) | 2007-02-06 | 2008-08-21 | Sharp Corp | モータ駆動装置及びそれを用いた電気掃除機 |
| US20080034532A1 (en) | 2007-02-07 | 2008-02-14 | Tai-Her Yang | Off-load reduced input power energy saving low noise air vacuum cleaner |
| JP5250979B2 (ja) | 2007-02-07 | 2013-07-31 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| JP4320743B2 (ja) | 2007-03-02 | 2009-08-26 | 株式会社デンソー | 回転機の制御装置 |
| US7911173B2 (en) * | 2007-03-14 | 2011-03-22 | Power Efficiency Corporation | Open loop method for controlling power |
| US7554473B2 (en) | 2007-05-02 | 2009-06-30 | Cirrus Logic, Inc. | Control system using a nonlinear delta-sigma modulator with nonlinear process modeling |
| US8044623B2 (en) | 2007-07-03 | 2011-10-25 | Seiko Epson Corporation | Drive control circuit for electric motor |
| DE102007040560A1 (de) | 2007-08-28 | 2009-03-12 | Continental Automotive Gmbh | Verfahren zur Ansteuerung eines Umrichters sowie zugehörige Vorrichtung |
| JP5211648B2 (ja) | 2007-11-02 | 2013-06-12 | セイコーエプソン株式会社 | Pwm制御回路及びpwm制御方法、並びに、それを用いた装置 |
| US7692395B2 (en) | 2007-11-16 | 2010-04-06 | The Bergquist Torrington Company | Extrapolation of back EMF signals in brushless DC motors |
| DE102008054487A1 (de) | 2008-01-09 | 2009-07-16 | DENSO CORPORARTION, Kariya-shi | Steuersystem für eine mehrphasige elektrische Drehmaschine |
| JP5144315B2 (ja) | 2008-03-11 | 2013-02-13 | パナソニック株式会社 | ブラシレスdcモータの駆動回路 |
| US8169107B2 (en) | 2008-05-30 | 2012-05-01 | Siemens Industry, Inc. | Method and system for reducing switching losses in a high-frequency multi-cell power supply |
| DE102008040096A1 (de) | 2008-07-02 | 2010-01-07 | Robert Bosch Gmbh | Verfahren zum Betreiben einer Elektrowerkzeugmaschine und eine Antriebseinheit für eine Elektrowerkzeugmaschine |
| IT1391191B1 (it) | 2008-08-05 | 2011-11-18 | Bitron Spa | Procedimento per il controllo di un motore brushless in c.c. a due fasi senza sensore di posizione |
| JP2010226777A (ja) | 2009-03-19 | 2010-10-07 | Oki Semiconductor Co Ltd | ブラシレスモータ駆動装置 |
| TWI416835B (zh) | 2009-03-24 | 2013-11-21 | Anpec Electronics Corp | 限制直流馬達電流的方法及其相關裝置及相關電路 |
| US8106618B2 (en) | 2009-04-02 | 2012-01-31 | Daimler Ag | Method and device for calibrating a position sensor placed on a shaft of a permanent magnet synchronous motor |
| GB2469143B (en) | 2009-04-04 | 2014-03-12 | Dyson Technology Ltd | Control of a permanent-magnet machine |
| GB2469140B (en) | 2009-04-04 | 2013-12-11 | Dyson Technology Ltd | Control of an electric machine |
| GB2508117B (en) | 2009-04-04 | 2014-10-29 | Dyson Technology Ltd | High-speed electric system |
| GB2469135B (en) | 2009-04-04 | 2013-11-06 | Dyson Technology Ltd | Power tuning an electric system |
| GB2469132B (en) | 2009-04-04 | 2014-01-29 | Dyson Technology Ltd | Control of an electric machine |
| GB2469128A (en) | 2009-04-04 | 2010-10-06 | Dyson Technology Ltd | Generating control signals for an electric machine from a position sensor |
| GB2469126B (en) | 2009-04-04 | 2013-11-06 | Dyson Technology Ltd | Control of an electric machine |
| GB2469131B (en) | 2009-04-04 | 2014-04-23 | Dyson Technology Ltd | Control of an electric machine |
| GB2469130B (en) | 2009-04-04 | 2014-01-29 | Dyson Technology Ltd | Control system for an electric machine |
| GB2469129B (en) | 2009-04-04 | 2013-12-11 | Dyson Technology Ltd | Current controller for an electric machine |
| GB2469133B (en) | 2009-04-04 | 2014-04-23 | Dyson Technology Ltd | Control system for an electric machine |
| GB2469137B (en) | 2009-04-04 | 2014-06-04 | Dyson Technology Ltd | Control of an electric machine |
| GB2469144B (en) | 2009-04-04 | 2014-11-05 | Dyson Technology Ltd | Control of an electric machine |
| JP2010273502A (ja) | 2009-05-25 | 2010-12-02 | Panasonic Corp | モータ駆動装置およびモータ駆動方法 |
| US8094472B2 (en) | 2009-06-02 | 2012-01-10 | Rhymebus Corporation | Power factor correction converter capable of fast adjusting load |
| EP2939793B1 (en) | 2009-09-04 | 2017-03-08 | Black & Decker Inc. | Power tool with a protective control module |
| US8698446B2 (en) | 2009-09-08 | 2014-04-15 | The Powerwise Group, Inc. | Method to save energy for devices with rotating or reciprocating masses |
| JP5824453B2 (ja) | 2009-09-08 | 2015-11-25 | ザ パワーワイズ グループ,インコーポレイテッドThe Powerwise Group,Inc. | 回転質量又は往復質量を有する装置のエネルギー節約システム及び方法 |
| US8575881B2 (en) | 2009-09-10 | 2013-11-05 | Energy Innovative Products, Inc. | Current injection circuit for delaying the full operation of a power factor control circuit for AC induction motors |
| EP2553795A4 (en) | 2010-03-29 | 2017-05-17 | Ramu, Inc. | Pm brushless motor drive circuit topology and control |
| GB201006397D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006384D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006390D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006395D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006388D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of brushless motor |
| GB201006386D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006394D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Controller for a brushless motor |
| GB201006392D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Controller for a brushless motor |
| GB201006391D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless permanent-magnet motor |
| GB201006398D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB201006387D0 (en) | 2010-04-16 | 2010-06-02 | Dyson Technology Ltd | Control of a brushless motor |
| GB2484289B (en) | 2010-10-04 | 2013-11-20 | Dyson Technology Ltd | Control of an electrical machine |
| US8093858B1 (en) | 2011-03-01 | 2012-01-10 | International Controls And Measurements Corp. | AC line voltage conditioner and controller |
| JP5894493B2 (ja) | 2011-08-09 | 2016-03-30 | ルネサスエレクトロニクス株式会社 | タイミング制御装置及びそれを備えた制御システム |
-
2010
- 2010-04-16 GB GBGB1006396.4A patent/GB201006396D0/en not_active Ceased
-
2011
- 2011-03-29 GB GBGB1105205.7A patent/GB201105205D0/en not_active Ceased
- 2011-04-13 EP EP11716013.5A patent/EP2559151B1/en not_active Not-in-force
- 2011-04-13 CN CN201180029677.2A patent/CN102948067B/zh active Active
- 2011-04-13 WO PCT/GB2011/050732 patent/WO2011128685A2/en active Application Filing
- 2011-04-13 KR KR1020147021406A patent/KR20140110027A/ko not_active Application Discontinuation
- 2011-04-13 US US13/086,175 patent/US8742707B2/en active Active
- 2011-04-13 KR KR1020127030023A patent/KR101621722B1/ko active IP Right Grant
- 2011-04-14 GB GB1106302.1A patent/GB2480727B/en active Active
- 2011-04-15 JP JP2011090599A patent/JP5524896B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20140110027A (ko) | 2014-09-16 |
| WO2011128685A2 (en) | 2011-10-20 |
| EP2559151B1 (en) | 2018-03-07 |
| CN102948067A (zh) | 2013-02-27 |
| EP2559151A2 (en) | 2013-02-20 |
| GB2480727B (en) | 2012-12-05 |
| US20110254483A1 (en) | 2011-10-20 |
| GB201106302D0 (en) | 2011-05-25 |
| KR101621722B1 (ko) | 2016-05-17 |
| WO2011128685A3 (en) | 2012-11-01 |
| US8742707B2 (en) | 2014-06-03 |
| CN102948067B (zh) | 2016-01-20 |
| GB201105205D0 (en) | 2011-05-11 |
| JP2011229385A (ja) | 2011-11-10 |
| GB201006396D0 (en) | 2010-06-02 |
| GB2480727A (en) | 2011-11-30 |
| KR20130027511A (ko) | 2013-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6511035B2 (ja) | ブラシレスモータの制御 | |
| JP5520251B2 (ja) | ブラシレスモータの制御 | |
| JP5484390B2 (ja) | ブラシレスモータの制御 | |
| JP5469632B2 (ja) | ブラシレスモータのためのコントローラ | |
| JP5524124B2 (ja) | ブラシレスモータの制御 | |
| JP5524123B2 (ja) | ブラシレスモータの制御 | |
| JP5546496B2 (ja) | ブラシレス永久磁石モータの制御 | |
| JP5484391B2 (ja) | ブラシレスモータの制御 | |
| JP5520252B2 (ja) | ブラシレスモータの制御 | |
| JP5425133B2 (ja) | ブラシレスモータの制御 | |
| JP5473979B2 (ja) | ブラシレスモータのためのコントローラ | |
| JP5524896B2 (ja) | ブラシレスモータの制御 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130522 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130820 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140410 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5524896 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |