JP5120027B2 - プローブ装置及びプロービング方法 - Google Patents
プローブ装置及びプロービング方法 Download PDFInfo
- Publication number
- JP5120027B2 JP5120027B2 JP2008092934A JP2008092934A JP5120027B2 JP 5120027 B2 JP5120027 B2 JP 5120027B2 JP 2008092934 A JP2008092934 A JP 2008092934A JP 2008092934 A JP2008092934 A JP 2008092934A JP 5120027 B2 JP5120027 B2 JP 5120027B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- imaging
- mounting table
- probe
- imaging means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2886—Features relating to contacting the IC under test, e.g. probe heads; chucks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/06—Measuring leads; Measuring probes
- G01R1/067—Measuring probes
- G01R1/073—Multiple probes
- G01R1/07307—Multiple probes with individual probe elements, e.g. needles, cantilever beams or bump contacts, fixed in relation to each other, e.g. bed of nails fixture or probe card
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2855—Environmental, reliability or burn-in testing
- G01R31/286—External aspects, e.g. related to chambers, contacting devices or handlers
- G01R31/2865—Holding devices, e.g. chucks; Handlers or transport devices
Description
多数の被検査チップが配列されたウエハを、載置台用の駆動部によりX方向、Y方向及びZ方向に移動可能でかつ鉛直軸周りに回転自在なウエハ載置台に載せ、プローブカードのプローブに前記被検査チップの電極パッドを接触させて被検査チップの検査を行うプローブ装置において、
前記ウエハ載置台に設けられ、前記プローブを撮像するための視野が上向きのプローブ撮像用の撮像手段と、
前記ウエハ載置台及びプローブカードの間の高さ位置におけるウエハ撮像位置と退避位置との間においてY方向に移動可能に設けられた移動体と、
X方向を左右方向とし、前記ウエハ撮像位置から退避位置を見た状態で左側、右側を決めるとすると、前記移動体に設けられ、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第1の撮像手段、及び前記移動体に設けられると共にその光軸が前記第1の撮像手段の光軸の右側に位置し、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第2の撮像手段と、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることによりプローブ撮像用の撮像手段の焦点とウエハ撮像用の第1の撮像手段の焦点及び第2の撮像手段の焦点との位置を順次合わせて、各時点のウエハ載置台の位置を取得するステップと、前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第1の撮像手段により、ウエハの中心を通りかつY方向に沿ったラインにて左右に2分割されるウエハの左側領域及び右側領域のうちの左側領域を撮像し、撮像時のウエハ載置台の位置を取得するステップと、前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第2の撮像手段により、ウエハの前記右側領域を撮像し、撮像時のウエハ載置台の位置を取得するステップと、前記ウエハ載置台に設けられたプローブ撮像用の撮像手段によりプローブを撮像し、撮像時のウエハ載置台の位置を取得するステップと、各ステップにて取得したウエハ載置台の位置に基づいてウエハとプローブとを接触させるためのウエハ載置台の位置を計算するステップと、を含むステップ群を実行する制御手段と、を備えたことを特徴とする。
多数の被検査チップが配列されたウエハを、載置台用の駆動部によりX方向、Y方向及びZ方向に移動可能でかつ鉛直軸周りに回転自在なウエハ載置台に載せ、プローブカードのプローブに前記被検査チップの電極パッドを接触させて被検査チップの検査を行うプロービング方法において、
前記ウエハ載置台に設けられ、前記プローブを撮像するための視野が上向きのプローブ撮像用の撮像手段と、
前記ウエハ載置台及びプローブカードの間の高さ位置におけるウエハ撮像位置と退避位置との間においてY方向に移動可能に設けられた移動体と、
X方向を左右方向とし、前記ウエハ撮像位置から退避位置を見た状態で左側、右側を決めるとすると、前記移動体に設けられ、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第1の撮像手段、及び前記移動体に設けられると共にその光軸が前記第1の撮像手段の光軸の右側に位置し、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第2の撮像手段と、を用い、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることによりプローブ撮像用の撮像手段の焦点とウエハ撮像用の第1の撮像手段の焦点及び第2の撮像手段の焦点との位置を順次合わせて、各時点のウエハ載置台の位置を取得する工程と、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第1の撮像手段により、ウエハの中心を通りかつY方向に沿ったラインにて左右に2分割されるウエハの左側領域及び右側領域のうちの左側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程と、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第2の撮像手段により、ウエハの前記右側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程と、
前記ウエハ載置台に設けられたプローブ撮像用の撮像手段によりプローブを撮像し、撮像時のウエハ載置台の位置を取得する工程と、
各工程にて取得したウエハ載置台の位置に基づいてウエハとプローブとを接触させるためのウエハ載置台の位置を計算する工程と、を備えたことを特徴とする。
多数の被検査チップが配列されたウエハを、載置台用の駆動部により水平方向及び鉛直方向に移動可能なウエハ載置台に載せ、プローブカードのプローブに前記被検査チップの電極パッドを接触させて被検査チップの検査を行うプローブ装置に用いられるコンピュータプログラムを格納した記憶媒体であって、
前記コンピュータプログラムは、上記各プロービング方法を実施するようにステップ群が組まれていることを特徴としている。
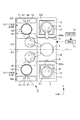
この例では、図18(a)、(b)に示すようにマクロカメラ81、82により順次ウエハWの図18中の下半分の左右を撮像し、E2、E3の位置を求めている。次いでウエハWをY方向に移動させて図19(a)、(b)に示すようにマクロカメラ81、82により順次ウエハWの図19中の上半分の左右を撮像し、E1、E4の位置求めている。
2 プローブ装置本体
3 ウエハ搬送機構
4A、4B ウエハチャック
5A、5B アライメントブリッジ
6A、6B プローブカード
10 搬送室
11 第1のロードポート
12 第2のロードポート
21A、21B 検査部
29 プローブ針
30 アーム
31 上段アーム
32 中段アーム
33 下段アーム
36 チャック部
37、38 光センサ
41 マイクロカメラ
45 マイクロカメラ
71 マイクロカメラ
72 マイクロカメラ
Claims (13)
- 多数の被検査チップが配列されたウエハを、載置台用の駆動部によりX方向、Y方向及びZ方向に移動可能でかつ鉛直軸周りに回転自在なウエハ載置台に載せ、プローブカードのプローブに前記被検査チップの電極パッドを接触させて被検査チップの検査を行うプローブ装置において、
前記ウエハ載置台に設けられ、前記プローブを撮像するための視野が上向きのプローブ撮像用の撮像手段と、
前記ウエハ載置台及びプローブカードの間の高さ位置におけるウエハ撮像位置と退避位置との間においてY方向に移動可能に設けられた移動体と、
X方向を左右方向とし、前記ウエハ撮像位置から退避位置を見た状態で左側、右側を決めるとすると、前記移動体に設けられ、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第1の撮像手段、及び前記移動体に設けられると共にその光軸が前記第1の撮像手段の光軸の右側に位置し、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第2の撮像手段と、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることによりプローブ撮像用の撮像手段の焦点とウエハ撮像用の第1の撮像手段の焦点及び第2の撮像手段の焦点との位置を順次合わせて、各時点のウエハ載置台の位置を取得するステップと、前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第1の撮像手段により、ウエハの中心を通りかつY方向に沿ったラインにて左右に2分割されるウエハの左側領域及び右側領域のうちの左側領域を撮像し、撮像時のウエハ載置台の位置を取得するステップと、前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第2の撮像手段により、ウエハの前記右側領域を撮像し、撮像時のウエハ載置台の位置を取得するステップと、前記ウエハ載置台に設けられたプローブ撮像用の撮像手段によりプローブを撮像し、撮像時のウエハ載置台の位置を取得するステップと、各ステップにて取得したウエハ載置台の位置に基づいてウエハとプローブとを接触させるためのウエハ載置台の位置を計算するステップと、を含むステップ群を実行する制御手段と、を備えたことを特徴とするプローブ装置。 - 前記移動体に設けられ、ウエハ表面を撮像するための視野が下向きであってかつ第1の撮像手段及び第2の撮像手段よりも倍率の低いウエハ撮像用の第1の低倍率カメラ及び第2の低倍率カメラを備え、
前記第1の低倍率カメラの光軸は、ウエハ撮像用の第1の撮像手段及び第2の撮像手段の各光軸を結ぶ中点よりも左側に位置し、前記第2の低倍率カメラの光軸は、前記中点よりも右側に位置することを特徴とする請求項1記載のプローブ装置。 - 第1の撮像手段と第1の低倍率用のカメラとの各光軸の組と、第2の撮像手段と第2の低倍率用のカメラとの各光軸の組とは、左右対称に形成されることを特徴とする請求項2記載のプローブ装置。
- 前記ステップ群は、ウエハ撮像用の第1の低倍率カメラによりウエハの前方左側領域の周縁を撮像するステップと、前記第2の低倍率カメラによりウエハの前方右側領域の周縁を撮像するステップと、前記第1の低倍率カメラによりウエハの後方左側領域の周縁を撮像するステップと、前記第2の低倍率カメラによりウエハの後方右側領域の周縁を撮像するステップと、これら4点の撮像時におけるウエハ載置台の位置に基づいてウエハの中心位置を求めるステップと、を含み、ウエハの周縁を撮像する各ステップは、前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより行われることを特徴とする請求項2または3記載のプローブ装置。
- ウエハ載置台上のウエハの周縁の撮像を、ウエハ撮像用の第1の低倍率カメラ及び第2の低倍率カメラに代えてウエハ撮像用の第1の撮像手段及び第2の撮像手段により行うことを特徴とする請求項4に記載のプローブ装置。
- 前記ステップ群は、ウエハ撮像用の第1の撮像手段及び第2の撮像手段により、ウエハ上の互いに離間した2つの特定点を撮像し、各撮像時におけるウエハ載置台の位置に基づいてウエハが予め設定した向きとなるようにウエハ載置台を回転させるステップを含むことを特徴とする請求項1ないし5のいずれか一つに記載のプローブ装置。
- ウエハ撮像用の第1の撮像手段及び第2の撮像手段は、前記移動体に撮像手段用の駆動部により互いに接離自在に設けられていることを特徴とする請求項1ないし6のいずれか一つに記載のプローブ装置。
- 前記制御手段は、ウエハの種別に対応する情報に基づいて、第1の撮像手段及び第2の撮像手段の光軸の互いの離間距離がウエハ上の2つの特定点の互いの離間距離となるように、撮像手段用の駆動部に対する制御信号を出力することを特徴とする請求項1ないし7のいずれか一つに記載のプローブ装置。
- 多数の被検査チップが配列されたウエハを、載置台用の駆動部によりX方向、Y方向及びZ方向に移動可能でかつ鉛直軸周りに回転自在なウエハ載置台に載せ、プローブカードのプローブに前記被検査チップの電極パッドを接触させて被検査チップの検査を行うプロービング方法において、
前記ウエハ載置台に設けられ、前記プローブを撮像するための視野が上向きのプローブ撮像用の撮像手段と、
前記ウエハ載置台及びプローブカードの間の高さ位置におけるウエハ撮像位置と退避位置との間においてY方向に移動可能に設けられた移動体と、
X方向を左右方向とし、前記ウエハ撮像位置から退避位置を見た状態で左側、右側を決めるとすると、前記移動体に設けられ、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第1の撮像手段、及び前記移動体に設けられると共にその光軸が前記第1の撮像手段の光軸の右側に位置し、ウエハ表面を撮像するための視野が下向きのウエハ撮像用の第2の撮像手段と、を用い、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることによりプローブ撮像用の撮像手段の焦点とウエハ撮像用の第1の撮像手段の焦点及び第2の撮像手段の焦点との位置を順次合わせて、各時点のウエハ載置台の位置を取得する工程と、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第1の撮像手段により、ウエハの中心を通りかつY方向に沿ったラインにて左右に2分割されるウエハの左側領域及び右側領域のうちの左側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程と、
前記移動体をウエハ撮像位置に静止させた状態で、ウエハ載置台を移動させることにより前記ウエハ撮像用の第2の撮像手段により、ウエハの前記右側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程と、
前記ウエハ載置台に設けられたプローブ撮像用の撮像手段によりプローブを撮像し、撮像時のウエハ載置台の位置を取得する工程と、
各工程にて取得したウエハ載置台の位置に基づいてウエハとプローブとを接触させるためのウエハ載置台の位置を計算する工程と、を備えたことを特徴とするプロービング方法。 - 前記ウエハ撮像用の第1の撮像手段により、ウエハの左側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程は、ウエハの前方左側領域の周縁及びウエハの後方左側領域の周縁を撮像する工程を含み、
前記ウエハ撮像用の第2の撮像手段により、ウエハの右側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程は、ウエハの前方右側領域の周縁及びウエハの後方右側領域の周縁を撮像する工程を含み、
これら4点の撮像時におけるウエハ載置台の位置に基づいてウエハの中心位置が求められることを特徴とする請求項9記載のプロービング方法。 - 前記ウエハ撮像用の第1の撮像手段により、ウエハの左側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程は、ウエハの左側領域の特定点を撮像する工程を含み、
前記ウエハ撮像用の第2の撮像手段により、ウエハの右側領域を撮像し、撮像時のウエハ載置台の位置を取得する工程は、ウエハの右側領域の特定点を撮像する工程を含み、
これら工程における各撮像時のウエハ載置台の位置に基づいてウエハが予め設定した向きとなるようにウエハ載置台を回転させる工程を含むことを特徴とする請求項9または10記載のプロービング方法。 - ウエハの種別に対応する情報に基づいて、ウエハ撮像用の第1の撮像手段及び第2の撮像手段の光軸の互いの離間距離がウエハ上の2つの特定点の互いの離間距離となるように、撮像手段用の駆動部により第1の撮像手段及び第2の撮像手段の位置を調整する工程を含むことを特徴とする請求項9ないし11のいずれか一つに記載のプロービング方法。
- 多数の被検査チップが配列されたウエハを、載置台用の駆動部により水平方向及び鉛直方向に移動可能なウエハ載置台に載せ、プローブカードのプローブに前記被検査チップの電極パッドを接触させて被検査チップの検査を行うプローブ装置に用いられるコンピュータプログラムを格納した記憶媒体であって、
前記コンピュータプログラムは、請求項9ないし12のいずれか一つに記載されたプロービング方法を実施するようにステップ群が組まれていることを特徴とする記憶媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008092934A JP5120027B2 (ja) | 2007-09-28 | 2008-03-31 | プローブ装置及びプロービング方法 |
| US12/237,920 US7724007B2 (en) | 2007-09-28 | 2008-09-25 | Probe apparatus and probing method |
| KR1020080094007A KR101020396B1 (ko) | 2007-09-28 | 2008-09-25 | 프로브 장치 및 프로빙 방법 |
| TW097137038A TWI442494B (zh) | 2007-09-28 | 2008-09-26 | Probe device and detection method |
| CN2008101695407A CN101403785B (zh) | 2007-09-28 | 2008-09-28 | 探测装置以及探测方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007256804 | 2007-09-28 | ||
| JP2007256804 | 2007-09-28 | ||
| JP2008092934A JP5120027B2 (ja) | 2007-09-28 | 2008-03-31 | プローブ装置及びプロービング方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009099937A JP2009099937A (ja) | 2009-05-07 |
| JP2009099937A5 JP2009099937A5 (ja) | 2011-06-30 |
| JP5120027B2 true JP5120027B2 (ja) | 2013-01-16 |
Family
ID=40537857
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008092934A Active JP5120027B2 (ja) | 2007-09-28 | 2008-03-31 | プローブ装置及びプロービング方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5120027B2 (ja) |
| KR (1) | KR101020396B1 (ja) |
| CN (1) | CN101403785B (ja) |
| TW (1) | TWI442494B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4949454B2 (ja) * | 2009-11-17 | 2012-06-06 | 東京エレクトロン株式会社 | プローブ装置 |
| JP2013024829A (ja) * | 2011-07-26 | 2013-02-04 | Seiko Epson Corp | 電子部品搬送装置及び電子部品搬送方法 |
| JP2014135363A (ja) * | 2013-01-09 | 2014-07-24 | Tokyo Electron Ltd | プローブ装置及びウエハ搬送ユニット |
| JP6220596B2 (ja) * | 2013-08-01 | 2017-10-25 | 東京エレクトロン株式会社 | プローバ |
| JP6084140B2 (ja) * | 2013-09-06 | 2017-02-22 | ヤマハファインテック株式会社 | 電気検査装置 |
| US11159784B2 (en) * | 2014-10-23 | 2021-10-26 | Cognex Corporation | System and method for calibrating a vision system with respect to a touch probe |
| JP6999321B2 (ja) * | 2017-07-31 | 2022-01-18 | 東京エレクトロン株式会社 | 検査装置、検査方法及び記憶媒体 |
| TWI794324B (zh) * | 2017-11-24 | 2023-03-01 | 日商日本電產理德股份有限公司 | 基板檢查裝置、檢查位置補正方法、位置補正資訊產生方法、以及位置補正資訊產生系統 |
| CN114308709A (zh) * | 2021-12-28 | 2022-04-12 | 傲普(上海)新能源有限公司 | 一种电芯极片叠片对位检测方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3306972B2 (ja) * | 1993-02-26 | 2002-07-24 | キヤノン株式会社 | 位置検出装置及びそれを用いた半導体素子の製造方法 |
| JPH0915302A (ja) * | 1995-06-30 | 1997-01-17 | Olympus Optical Co Ltd | 回路基板検査機の位置決め装置および位置決め方法 |
| JP3303968B2 (ja) * | 1998-02-19 | 2002-07-22 | 東京エレクトロン株式会社 | ウエハと接触子の位置合わせ装置 |
| JP4740405B2 (ja) | 2000-11-09 | 2011-08-03 | 東京エレクトロン株式会社 | 位置合わせ方法及びプログラム記録媒体 |
| JP2003152037A (ja) * | 2001-11-12 | 2003-05-23 | Moritex Corp | ウェハ検査方法、検査装置及び検査用赤外線撮像装置 |
| JP2004063877A (ja) | 2002-07-30 | 2004-02-26 | Tokyo Seimitsu Co Ltd | ウェハの位置決め修正方法 |
| JP2004140084A (ja) * | 2002-10-16 | 2004-05-13 | Sharp Corp | 半導体チップのピックアップ方法およびそのピックアップ装置 |
| KR20050024922A (ko) * | 2003-09-05 | 2005-03-11 | 김광렬 | 웨이퍼의 결함 검사장치 및 그 방법 |
| JP2005223251A (ja) * | 2004-02-09 | 2005-08-18 | Seiko Epson Corp | 半導体装置の検査方法及びその検査装置、並びにその検査装置の制御プログラム |
| JP4799880B2 (ja) | 2005-02-23 | 2011-10-26 | オー・エイチ・ティー株式会社 | 検査装置及び検査方法並びに位置決め方法 |
-
2008
- 2008-03-31 JP JP2008092934A patent/JP5120027B2/ja active Active
- 2008-09-25 KR KR1020080094007A patent/KR101020396B1/ko active IP Right Grant
- 2008-09-26 TW TW097137038A patent/TWI442494B/zh not_active IP Right Cessation
- 2008-09-28 CN CN2008101695407A patent/CN101403785B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| TWI442494B (zh) | 2014-06-21 |
| TW200931556A (en) | 2009-07-16 |
| KR20090033036A (ko) | 2009-04-01 |
| CN101403785B (zh) | 2012-01-11 |
| JP2009099937A (ja) | 2009-05-07 |
| KR101020396B1 (ko) | 2011-03-08 |
| CN101403785A (zh) | 2009-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5120027B2 (ja) | プローブ装置及びプロービング方法 | |
| JP5120017B2 (ja) | プローブ装置 | |
| JP5120018B2 (ja) | プローブ装置 | |
| US7724007B2 (en) | Probe apparatus and probing method | |
| JP5088167B2 (ja) | プローブ装置、プロービング方法及び記憶媒体 | |
| US7741837B2 (en) | Probe apparatus | |
| TWI442509B (zh) | Check the device | |
| US20190187180A1 (en) | Prober | |
| KR102219110B1 (ko) | 검사 장치, 검사 방법 및 기억 매체 | |
| JP3202577B2 (ja) | プローブ方法 | |
| JP5293034B2 (ja) | プローブ装置 | |
| JP3303968B2 (ja) | ウエハと接触子の位置合わせ装置 | |
| JP2979277B2 (ja) | プローブ方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120522 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120723 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120925 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121008 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5120027 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |